1. معرفی
روشهای زیادی برای سنجش زیرسطحی توسعه یافته و مورد استفاده قرار میگیرند، از جمله پژواک ضربه (IE)، پاسخ ضربه (IR)، رادار نفوذی زمین (GPR)، کشش زنجیرهای، و تحلیل طیفی امواج سطحی (SASW). اینترنت اکسپلورر قادر به شناسایی جداشدگی و ویژگیهای لایههای سطحی سطحی است [ 1 ]. IR میتواند سختی/ تحرک دینامیکی کل ساختار روسازی را آزمایش کند [ 2 ]. GPR برای مکان یابی مواد فلزی مانند میلگردهای تقویت کننده بهترین است [ 3 ]. Chain-Drag می تواند با گوش دادن به صداهای توخالی، نواحی جدا شده را بیابد [ 4 ]. SASW و روشهای مرتبط با آن به دلیل قابلیت تخمین ضخامت و مدول الاستیک لایههای زیرسطحی بسیار محبوب هستند [ 5 ، 6] .].
از زمانی که برای اولین بار در دهه 1980 پیشنهاد شد [ 6 ، 7 ]، SASW به طور گسترده در آزمایش های میدانی زمین شناسی برای تخمین نیمرخ خاک زیرزمینی بدون هسته گیری یا باز کردن زمین استفاده شده است [ 8]]. از ویژگی های پراکندگی موج سطحی استفاده می کند که به صورت افقی در خاک منتشر می شود که در معرض بار ضربه ای قرار می گیرد. منحنی پراکندگی نشان دهنده رابطه بین سرعت موج، طول موج و فرکانس است. هنگامی که منحنی پراکندگی از داده های آزمایش به دست آمد، مشخصات لایه و سرعت های برشی را می توان با الگوریتم های وارونگی تخمین زد. تحقیقات گسترده ای برای بهبود دقت و کارایی در طول روش وارونگی انجام شده است. در میان آنها، روش ماتریسهای سختی به طور گسترده برای ارائه شبیهسازی رو به جلو برای تحلیل وارونگی استفاده شد [ 9 ]. در سال های اخیر، SASW برای بررسی سیستم های روسازی [ 10 ، 11 ] و سازه های بتنی [ 12] گسترش یافته است.]. برخی روش های دیگر بر اساس همان اصل SASW با موفقیت توسعه یافتند. در میان آنها، روش تجزیه و تحلیل چند کاناله موج سطحی (MASW) از حسگرهای متعدد برای ضبط میدان موج کامل و حل حالتهای موج مختلف استفاده میکند [ 13 ].
علیرغم این دستاوردهای هیجانانگیز روشهای SASW، وضعیت هنر روشهای مبتنی بر امواج سطحی به دلیل تخصص در الگوریتمهای تکراری و سنجش تماس، همچنان بهعنوان تکنیک تست با راندمان پایین آفلاین محدود است. سرعت کم و وقفه ترافیکی مانع اجرای آن در بازرسی روسازی می شود. اخیراً، تلاشهایی برای بهبود سرعت آزمایش با استفاده از سنسورهای غیر تماسی، میکروفونها، برای جایگزینی سنسورهای تماسی سنتی، شتابسنجها یا ژئوفونها [14 ] انجام شد که در آنها از موج سطحی نشتی جمعآوریشده توسط میکروفونها برای تجزیه و تحلیل استفاده میشود. پراکندگی مفهوم آزمایش سیار نیز برای انجام آزمایش سریع بر روی صفحات بتنی توسط رایدن و همکاران مورد بررسی قرار گرفت. [ 15]، که الهام بخش جامعه برای تلاش برای آزمایش امواج سطحی غیر تماسی بود.
یکی از مسائل مهمی که کارایی روشهای خانواده SASW را محدود میکند، فرآیند وارونگی تکراری است که معمولاً زمانبر است و برای تنظیم مقادیر اولیه و تنظیمشده پروفیل مدول الاستیک به تخصص انسانی نیاز دارد. در نتیجه، روش SASW اساساً به عنوان یک آزمون ثابت پردازش شده نقطه به نقطه محدود می شود. محققان به دنبال الگوریتمهای تحلیل وارونگی سریعتر و خودکار برای افزایش کارایی آن هستند. الگوریتمی در سال 1995 برای ساخت سریع منحنی پراکندگی از طریق برازش منحنی با ارزش پیچیده به اطلاعات فاز طیف توان متقاطع با استفاده از تابع همدوسی به عنوان تابع وزنی توسعه یافت [16] .]. یک الگوریتم مونت کارلو و روش حداکثر درستنمایی به ترتیب برای بررسی راه حل های ممکن با حداقل محدودیت ها و تخمین عدم قطعیت پارامترهای مدل حاصل [ 17 ] انتخاب شدند. به منظور شناسایی آسان حالت های انتشار غالب، یک روش وارونگی بر اساس حداکثر ضریب انعطاف پذیری عمودی معرفی شد [ 18 ]. علاوه بر این، یک الگوریتم جدید به نام تکنیک پیک عبوری و عدد موج فرکانس (PT/FW) در سال 2006 برای تعیین سرعت فاز بهجای روش سنتی اختلاف فاز [19] توسعه یافت . علاوه بر این، وارونگی مبتنی بر GA (الگوریتم ژنتیک) [ 20 ] و ترکیبی از الگوریتم های ژنتیک و خطی در یک وارونگی مشترک دو مرحله ای [20]21 ] نیز در سال های اخیر به کار گرفته شده اند. با این حال، تمام این پیشرفتها تنها راه اولیهسازی و تنظیم نمایه فرضی را برای همگرایی سریع اصلاح کردند. وارونگی هنوز بر رویه اصلی حدس زدن اول و بررسی با تحلیل رو به جلو متکی است. الگوریتم جستجوی جهانی بازپخت شبیه سازی شده سریع (FSA) تلاش دیگری برای به حداقل رساندن تفاوت بین طیف سرعت برشی اندازه گیری شده و آن محاسبه شده از مدل لایه نظری، از جمله هندسه تنظیم میدان [22] بود . این وارونگی راهحلهای جدیدی را به ارمغان میآورد، اما همچنان برای دقت قابل قبول، تا حدودی از تکرار طولانیمدت رنج میبرد. روش وارونگی ساده شده (SIM) برای دادههای پراکندگی موج سطحی کمک دیگری برای حل وارونگی کارآمد بود [ 23]، که از ضریب عمق نفوذ برای ارائه سرعت موج برشی در مقابل پروفیل عمق استفاده می کند.
در این مقاله، یک الگوریتم وارونگی سریع با استفاده از ویژگی های اساسی امواج سطحی پیشنهاد شده است. در یک نیمه فضای همگن، ویژگی های توزیع جابجایی ذرات در امتداد عمق نفوذ برای تسلط بر رابطه بین مشخصات سرعت برشی و منحنی پراکندگی ایجاد می شود. بنابراین، سرعت فاز در یک طول موج معین به صورت ترکیب وزنی از سرعت های برشی در عمق نفوذ با استفاده از جابجایی ذرات نرمال شده به عنوان فاکتورهای وزنی بیان می شود. بهعلاوه، برای نیمفضای لایهای، حالت موج ظاهری حالت اساسی است زمانی که سفتی لایهها از نرم به سخت با عمق افزایش مییابد. در این مورد، جابجایی ذرات نرمال شده همچنان به عنوان فاکتورهای وزنی کار می کنند. سپس یک الگوریتم وارونگی سریع بر اساس این رابطه ایجاد می شود. این الگوریتم پیشنهادی به ورودی دستی یا تنظیم پروفایل های آزمایشی نیاز ندارد و بنابراین کاملاً خودکار است. از آنجایی که هیچ شبیه سازی رو به جلو مانند روش ماتریس سختی مورد نیاز نیست، روش پیشنهادی به اندازه کافی برای عملیات شبه بلادرنگ سریع است. صحت این روش با استفاده از روش ماتریس سختی و همچنین با مقایسه پروفیل های سرعت برشی تخمینی با نتایج سایر روش های منتشر شده تایید می شود.
2. SASW با هوا
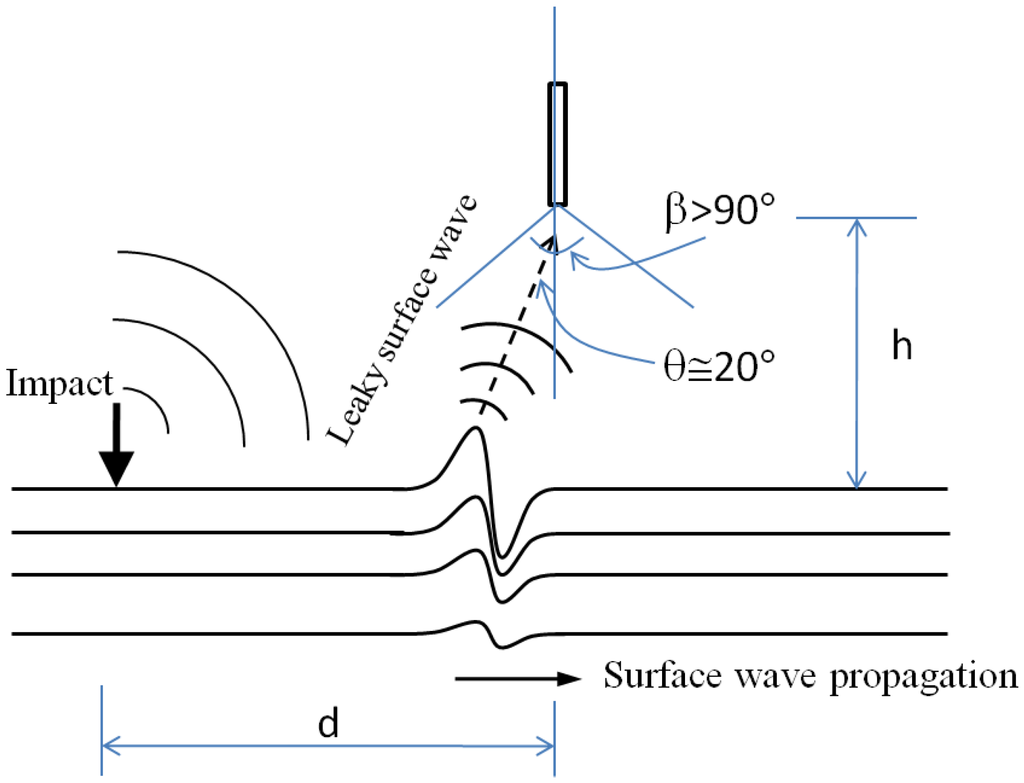
همانطور که در شکل 1 نشان داده شده است، با در نظر گرفتن یک نیمه فضای لایه ای که تحت یک بار نقطه ضربه در سطح قرار می گیرد ، علاوه بر انتشار موج P و موج برشی، موج سطحی نیز به صورت افقی منتشر می شود. در هوای بالای سطح، ارتعاش سطح به عنوان یک منبع صوتی برای تابش موج صوتی عمل می کند. این موج صوتی تابشی اصطلاحاً موج سطحی نشتی نامیده می شود. با توجه به قوانین اسنل، زاویه نشتی θ توسط:
که در آن، C a و C R سرعت موج صوتی در هوا و سرعت موج سطحی (موج ریلی) در نیمه فضا (مانند روسازی) هستند. C a حدود 340 متر بر ثانیه است و C R برای مثال می تواند 1000 متر بر ثانیه باشد . بنابراین، زاویه نشتی θ ≈ 20 درجه است. امواج سطحی تشعشع شده را می توان با میکروفون های جهت دار که معمولاً دارای زاویه موثر 100 درجه هستند، تشخیص داد.
با استفاده از ویژگی های امواج سطحی تابشی می توان تست SASW را به جای شتاب سنج با میکروفون انجام داد. شکل 2 یک پیکربندی شماتیک از این تست SASW (یا MASW) جفت شده با هوا را نشان می دهد. دو یا چند میکروفون در فاصله کمی از سطح زمین قرار می گیرند و به دستگاه جمع آوری داده و رایانه متصل می شوند. هنگامی که یک نیروی ضربه اعمال می شود، سیگنال جمع آوری شده هم شامل موج سطحی و هم موج صوتی مستقیم چکش می شود. در شرایطی که میکروفون ها نزدیک سطح باشند و سرعت برشی روسازی بسیار بیشتر از سرعت صوت باشد، موج صوتی مستقیم از چکش دیرتر از موج سطحی به میکروفون می رسد. تفاوت زمان رسیدن آنها را می توان به صورت زیر محاسبه کرد:
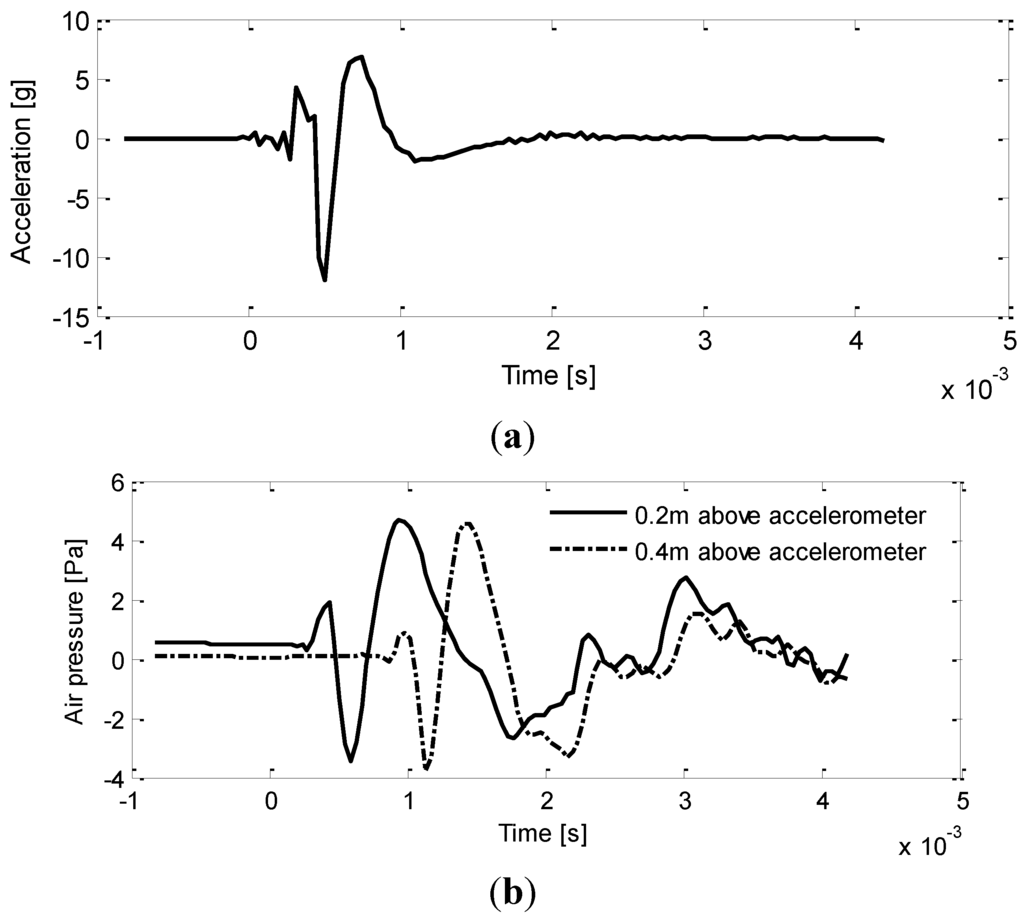
در یک پیکربندی معمولی با d = 0.5 m و h = 0.05 m، این تاخیر زمانی می تواند 1 میلی ثانیه باشد. بنابراین، موج سطحی را می توان با اعمال پنجره زمانی مناسب بر روی داده های به دست آمده از سیگنال کل کم کرد. شکل 3 نمونه ای از موج سطحی اندازه گیری شده توسط شتاب سنج (a) و موج سطح تابشی اندازه گیری شده توسط میکروفون (b) را نشان می دهد. از مقایسه، می توان دریافت که قسمت اول داده های میکروفون تقریباً همزمان می رسد و ویژگی مشابه داده های شتاب سنج را نشان می دهد. این بخش از داده ها را می توان به عنوان موج سطحی تشعشع کننده شناسایی کرد. بخش دوم داده های میکروفون به عنوان نویز در نظر گرفته می شود زیرا هیچ سیگنالی در شتاب سنج جفتی در زمان مربوطه ارائه نمی شود.
شکل 2. پیکربندی SASW/MASW معمولی کوپل شده با هوا.
شکل 3. ( الف ) داده های نمونه جمع آوری شده توسط داده های شتاب سنج. و ( ب ) داده های نمونه جمع آوری شده توسط میکروفون.
همانطور که در شکل 2 نشان داده شده است، استراتژی SASW با هوا را می توان با استقرار یک آرایه میکروفون در بالای سطح به یک MASW جفت شده با هوا گسترش داد . موج سطحی تابشی را می توان از سیگنال های صوتی اندازه گیری شده استخراج کرد. فنآوریهای حذف نویز، مانند محفظههای صوتی و فیلترهای دیجیتال میتوانند برای بهبود اجرای حسگرهای همراه با هوا از طریق میکروفونها استفاده شوند. روش های تحلیل پراکندگی رو به جلو برای SASW سنتی را می توان برای تجزیه و تحلیل موج سطحی تابشی استفاده کرد. چنین روش هایی را می توان در بسیاری از متون منتشر شده یافت [ 6 ، 8 ]. روشهای وارونگی سریع پیشنهادی نیز با استراتژی SASW با هوا توسط میکروفون سازگار هستند.
3. جابجایی ذرات موج سطحی
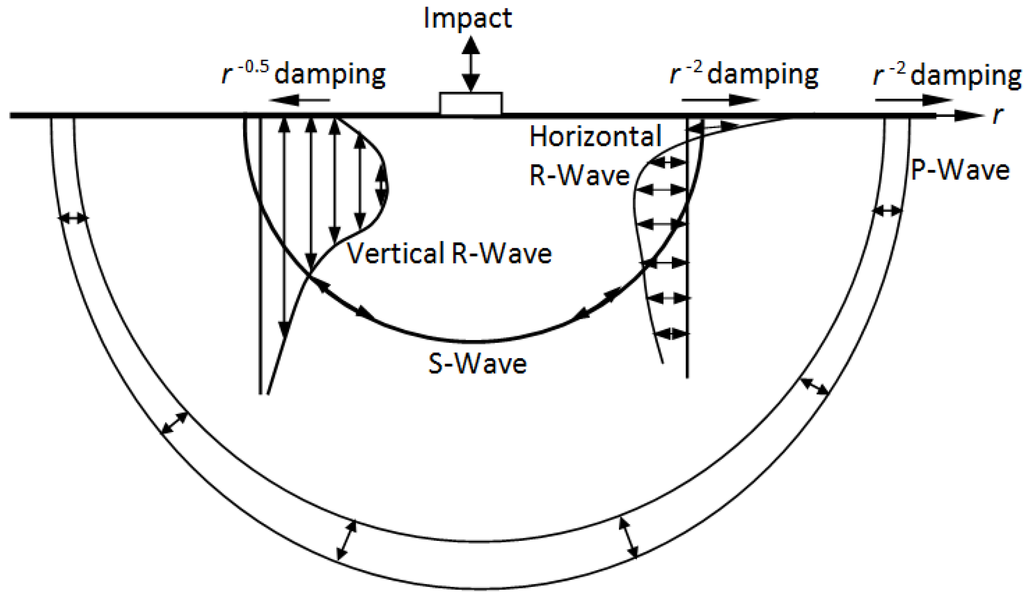
در این بخش، خواص موج سطحی را که برای روش وارونگی پیشنهادی ضروری است، به اختصار بررسی میکنیم. هنگامی که یک نیمه فضای همگن تحت یک نیروی نقطه ای روی سطح قرار می گیرد، سه نوع موج تنش ایجاد می شود. آنها دو موج بدن هستند: موج P (موج فشرده سازی) و موج S (موج برشی). و یک موج سطحی (که موج ریلی یا موج R نیز نامیده می شود). هر دو امواج بدن در داخل نیم فضا منتشر می شوند اما در جهات عمود بر هم منتشر می شوند. موج S دارای اجزای عمودی (SV) و افقی (SH) است. موج P با ارتعاش ذرات در یک جهت حرکت می کند در حالی که موج S به صورت عرضی حرکت می کند. از سوی دیگر، موج R در امتداد سطح آزاد نیم فضا حرکت می کند. به دلیل میرایی مواد، هر سه موج در حین انتشار ضعیف می شوند، هرچند با سرعت های متفاوت. در سطح،r -2 ( r شعاع منبع است)، در حالی که موج سطحی بسیار کمتر از مرتبه r -1/2 ضعیف می شود . موج سطحی اغلب برای اندازه گیری خواص مواد به دلایل زیر استفاده می شود: (1) به راحتی توسط ضربه سطح تحریک می شود. (2) دارای میرایی کم است. (3) همچنین به راحتی در سطح اندازه گیری می شود. و (4) می توان آن را با تابش امواج همراه با هوا اندازه گیری کرد. شکل 4 الگوی این امواج تنش را نشان می دهد.
شکل 4. توزیع امواج تنش از یک بار عمودی بر روی یک نیمه فضای الاستیک همگن (پس از ریچارت و همکاران [ 24 ]).
رابطه بین سرعت امواج تنش را می توان با عبارات خطی به صورت زیر بیان کرد:
که در آن VP ، VS و VR به ترتیب سرعت فاز موج P، موج S و موج سطحی (موج R) هستند . υ نسبت پواسون است.
یکی دیگر از ویژگی های اساسی امواج سطحی شکل جبهه موج است. کشف شده است که موج سطحی به صورت شعاعی به سمت بیرون در امتداد یک جبهه موج استوانه ای منتشر می شود، در حالی که موج P و موج S در امتداد یک جبهه موج نیمکره منتشر می شوند، همانطور که در شکل 4 نشان داده شده است . این بدان معنی است که موج سطحی در عمق نفوذ با همان سرعت به سمت بیرون منتشر می شود.
از طرف دیگر، حرکت ذرات موج سطحی در امتداد عمق نفوذ تغییر می کند و در عمق طول موج های تقریباً سه گانه کوچک می شود. برکان و همکاران راه حل تقریبی برای جابجایی ذرات موج سطحی همراه با عمق نفوذ را به صورت [ 25 ] ارائه کرد:
برای نسبت پواسون ν = 0.5:
برای نسبت پواسون ν = 0.25:
که در آن u و v به ترتیب اجزای افقی و عمودی دامنه جابجایی ذرات هستند. L c طول موج است. y عمق است. y/L c عمق بدون بعد است. µ ضریب Lamé (مدول برشی) است. و P نیروی ضربه است.
هنگام جایگزینی u و v با جابجایی بدون بعد به ترتیب u/u 0 و v/v 0 به ترتیب ( u 0 و v 0 جابجایی در سطح هستند)، توزیع دامنه جابجایی ذرات را می توان در نموداری با مقدار بی بعد رسم کرد. جابجایی در مقابل عمق بدون بعد، همانطور که در شکل 5 نشان داده شده است . این تضمین می کند که تأثیر بر جابجایی ذرات از نسبت های مختلف پواسون ناچیز است.
شکل 5. توزیع جابجایی ذرات همراه با عمق نفوذ موج سطحی (پس از ریچارت و همکاران [ 24 ]).
4. الگوریتم وارونگی سریع
4.1. رابطه بین سرعت فاز و سرعت برشی سیستم لایه ای
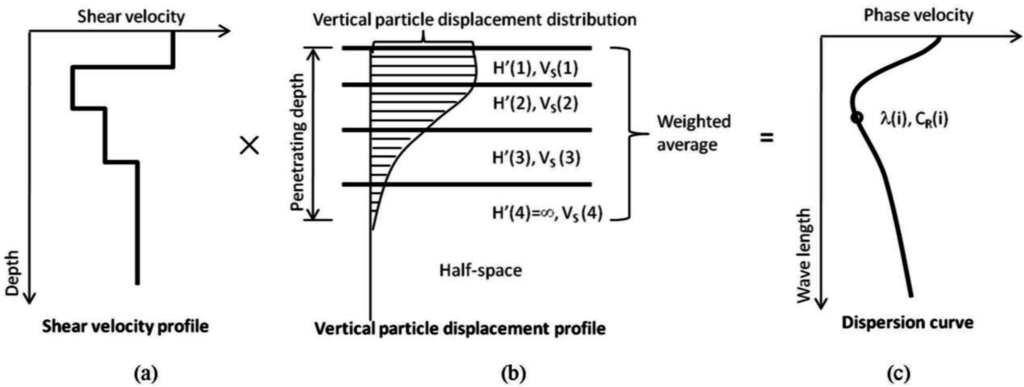
برای یک سیستم زمین لایهای، انتشار موج سطحی باید در جلوی موج استوانهای حفظ شود، اگر اثرات چند حالته حذف شوند در حالی که حالت اصلی غالب است. بنابراین، منطقی است که باور کنیم رابطه خطی مشابهی بین سرعت فاز و سرعت برشی لایههای زیرزمینی وجود دارد. از آنجایی که موج در لایههای نفوذی با یک عدد موج حرکت میکند، احتمالاً نوعی میانگین سرعت برشی این لایهها بر سرعت فاز غالب است. این فرض توسط Xia و همکاران تایید شد . [ 26تحقیقات او نشان داد که در مقایسه با سرعت موج P، چگالی و ضخامت لایه، سرعت موج برشی پارامتر غالبی است که بر تغییرات سرعت فاز موج ریلی در محدوده فرکانس بالا (> 5 هرتز) تأثیر میگذارد. علاوه بر این، از دیدگاه مفهوم انرژی، ذرات ارتعاشی با جابجایی بزرگتر باید کمک بیشتری به تعیین سرعت کل موج سطحی داشته باشند. بنابراین، توزیع جابجایی ذرات در امتداد عمق نفوذ به عنوان ضریب وزنی میانگینگیری انتخاب میشود. از آنجایی که تنها مولفه حرکت عمودی موج سطحی توسط حسگرهای SASW اندازه گیری می شود، تنها مولفه عمودی جابجایی ذرات به عوامل وزنی کمک می کند. بنابراین، یک رابطه میانگین وزنی در اینجا برای اتصال مستقیم سرعت فاز و سرعت برشی لایه پیشنهاد شده است:
جایی که Vآر( λ )�آر(�)سرعت فاز موج سطحی تابعی از طول موج λ است. اچ“( من )اچ“(من)معادل ضخامت لایه i است . V“آر( من )�آر“(من)سرعت فاز معادل در لایه i است . v ( y)�(�)جزء عمودی جابجایی ذرات در عمق y است . υ ( من )�(من)نسبت پواسون لایه i است . n کل لایه هایی هستند که طول موج λ به آنها نفوذ کرده است. از آنجا که v ( y)�(�)به سرعت در امتداد عمق ضعیف می شود، انتخاب می کند yn= 2 λ��=2�مطابق شکل 5 می تواند نسبتاً دقیق باشد . از نظر تجربی، کل عمق نفوذ yn��در مورد است 0.3 λ0.3�به 0.4 λ0.4�. شکل 6 رابطه گرافیکی بیان شده در معادله (7a-c) را نشان می دهد.
شکل 6. رابطه بین پروفیل سرعت برشی و منحنی پراکندگی برای سیستم لایه ای. ( الف ) مشخصات سرعت برشی. ( ب ) جابجایی ذرات. و ( ج ) منحنی پراکندگی.
4.2. الگوریتم وارونگی
با رابطه ای که در بالا نشان داده شد، به دست آوردن سرعت فاز تخمینی یک موج سطحی برای یک سیستم خاص با مشخصات لایه داده شده بسیار آسان است. یک الگوریتم وارونگی جدید را می توان برای تخمین پروفایل لایه از منحنی پراکندگی اندازه گیری شده با آزمون های SASW ایجاد کرد. الگوریتم جدید شامل دو مرحله است: مقداردهی اولیه و تنظیم تکراری.
مرحله اول به عنوان مقداردهی اولیه: (1) یک منحنی پراکندگی در تابعی از سرعت فاز در مقابل طول موج داده می شود. (2) با استفاده از نسبت تجربی عمق به طول موج 0.3-0.4، آن را به یک تابع مجزا از سرعت فاز در مقابل عمق تقریبی لایه تبدیل کنید. (3) فرض کنید هر عمق یک لایه را نشان می دهد. (4) با شروع از لایه اول، کل سازه را به صورت نیم فاصله در نظر بگیرید، سپس سرعت برشی لایه اول را Vاس( 1 )�اس(1)حل شدنی هست؛ (5) به لایه دوم بروید، فرض کنید لایه دوم به همراه لایه های زیرین یک نیم فاصله هستند، سپس مقدار اولیه سرعت برشی را برای لایه دوم حل کنید. V0اس( 2 )�اس0(2); و (6) به جلو قدم بردارید و سرعت های برشی اولیه را برای بقیه لایه های گسسته حل کنید.
مرحله دو به عنوان تنظیم تکراری: (1) با شروع از لایه دوم، سرعت برشی لایه دوم را ترک کنید. V1اس( 2 )�اس1(2)ناشناخته، حل کنید V“اس( 2 )�اس“(2)از معادلات بالا با استفاده از سرعت های برشی قبلی به دست آمده از تمام لایه های دیگر. (2) تفاوت را محاسبه کنید آر2=V“اس( 2 ) –V0اس( 2 )آر2=�اس“(2)–�اس0(2); (3) سرعت برشی لایه دوم را تنظیم کنید V1اس( 2 )�اس1(2)با 20 درصد یا کمتر از آر2آر2برای همگرایی بهتر، یعنی V1اس( 2 ) =V0اس( 2 ) + 0.2آر2�اس1(2)=�اس0(2)+0.2آر2; (4) قدم به جلو و حل مقادیر جدید برای همه لایه ها. و (5) مراحل (1) تا (4) را تا زمانی که راه حل ها همگرا شوند تکرار کنید. یه تفاوت کوچیک آر2آر2(<10 m/s) به عنوان معیار همگرایی تنظیمی در نظر گرفته شده است.
در وارونگی، هر مرحله از نقطه پراکندگی گسسته به عنوان یک لایه نازک در نظر گرفته می شود، روش وارونگی لایه ها و اعماق واقعی را مستقیماً تعیین نمی کند. لایه ها و اعماق واقعی را می توان از پروفیل سرعت برشی معکوس مشاهده کرد. برای پروفیل معکوس، آن لایه های نازک که متعلق به یک لایه واقعی هستند باید سرعت برشی بسیار مشابهی داشته باشند. از آنجایی که هیچ پیش فرضی برای عمق لایه مورد نیاز نیست، این وارونگی راه حل منحصر به فردی ایجاد می کند. در مقابل، روشهای وارونگی مرسوم به پروفیل سرعت برشی اولیه از پیش فرض شده حساس هستند و در نتیجه اغلب به راهحلهای معتبر متعدد منجر میشوند.
شکل 7 نمودار جریان منطقی دو مرحله وارونگی فوق را نشان می دهد. مشاهده می شود که تمام محاسبات در وارونگی، عملیات جبری صرف برای یک منحنی پراکندگی گسسته معین هستند. هیچ معادله دیفرانسیل درگیر نیست. بنابراین، کل فرآیند وارونگی در مقایسه با روشهای وارونگی سنتی بسیار سریع و کاملاً خودکار است. کمتر از 1 ثانیه طول می کشد تا پروفیل سرعت برشی معکوس با استفاده از برنامه Matlab که طبق الگوریتم فوق توسعه یافته است، انجام شود .
شکل 7. نمودار جریان تحلیل وارونگی سریع. ( الف ) مرحله اولیه. و ( ب ) مرحله تنظیم.
5. اعتبارسنجی با روش ماتریس سختی
در مقایسه با استخراج سنتی منحنیهای پراکندگی با استفاده از معادلات دیفرانسیل در مکانیک جامدات، رابطه برشی-پراکندگی پیشنهادی و الگوریتم وارونگی مربوطه نسبتاً ساده است. بر ویژگی های غالب انتشار موج تمرکز می کند و بسیاری از اجزای فیزیکی دیگر را نادیده می گیرد. بنابراین، این عملاً یک ساده سازی تجربی تجزیه و تحلیل پراکندگی / وارونگی است. تاکنون هیچ اعتبارسنجی ریاضی برای این الگوریتم به دست نیامده است. در عوض، شبیهسازی عددی رو به جلو بر اساس روش ماتریس سختی به عنوان یک ابزار قابل اعتماد برای تأیید صحت این روش وارونگی سریع انتخاب میشود.
5.1. روش ماتریس سختی
در ابتدا توسط Kausel و Roesset در سال 1981 [ 9 ] پیشنهاد شد، روش ماتریس سختی به طور گسترده توسط جامعه مکانیک خاک پذیرفته شده است. روش ماتریس سختی که از ماتریس انتقال Haskell-Thomson [ 27 ، 28 ] توسعه یافته است، دارای مزایای ماتریس متقارن، خاک های با لایه های دلخواه، بارگذاری استوانه ای متقارن و غیره است. بنابراین، روش ماتریس سختی برای حل نه تنها مدهای اساسی بلکه برای انتشار موج درگیر چند حالته مناسب است.
معادله حاکم بر روش ماتریس سختی در حوزه فرکانس و عدد موج به صورت زیر است:
جفت نشده:
که در آن [ K ] خود ماتریس سختی است که از هر لایه در هر دو موج SH و موج SV-P مونتاژ شده است. به طور خاص، موج SH پاسخ دینامیکی جابجایی زاویه ای آزیموت را تعریف می کند در حالی که موج SV-P جابجایی خطی افقی و عمودی را تعیین می کند. معادله (8) را می توان به طور جداگانه در معادلات (9) و (10) به دلیل ویژگی های مستقل خطی موج SH و موج SV-P نوشت. بردار { U } بردار پاسخ جابجایی شامل اجزای افقی، زاویه آزیموت و جابجایی عمودی برای هر لایه است و { P } بردار بارگذاری خارجی است. هنگامی که یک ضربه نقطه عمودی ارائه می شود، { P } به الگوی {0، 0، 1، 0، 0، …، 0} تبدیل می شود.
ماتریس سختی را می توان با حذف زاویه آزیموت با توجه به بارگذاری متقارن استوانه ای و نادیده گرفتن موج SH ساده کرد. بنابراین، برای مدلسازی موج سطح بار نقطهای عمودی، فقط عناصر جابجایی عمودی سطح در بردار { U } باید در قسمت موج SV-P متمرکز شوند زیرا موج SH با موج SV-P جدا نشده است. در این حالت، ماتریس سفتی مونتاژ نهایی، برهم نهی قسمت موج SV-P هر لایه است، در حالی که قسمت نیمه فضایی عنصر پایینی خود را دست نخورده دارد.
پس از انتقال تابع بسل، نتایج حاصل از ماتریس سختی در حوزه عددی موج فرکانس را می توان به یک حوزه فضایی به منظور مطالعه پاسخ دینامیکی از منبع ضربه با شعاع r تبدیل کرد . حالتهای طبیعی و حالت غالب امواج در حال انتشار را میتوان به ترتیب با مقدار ویژه ماتریس سختی و عدد موج مربوط به حداکثر بزرگی پاسخ برای هر فرکانس شناسایی کرد.
5.2. مشخصات سختی صعودی
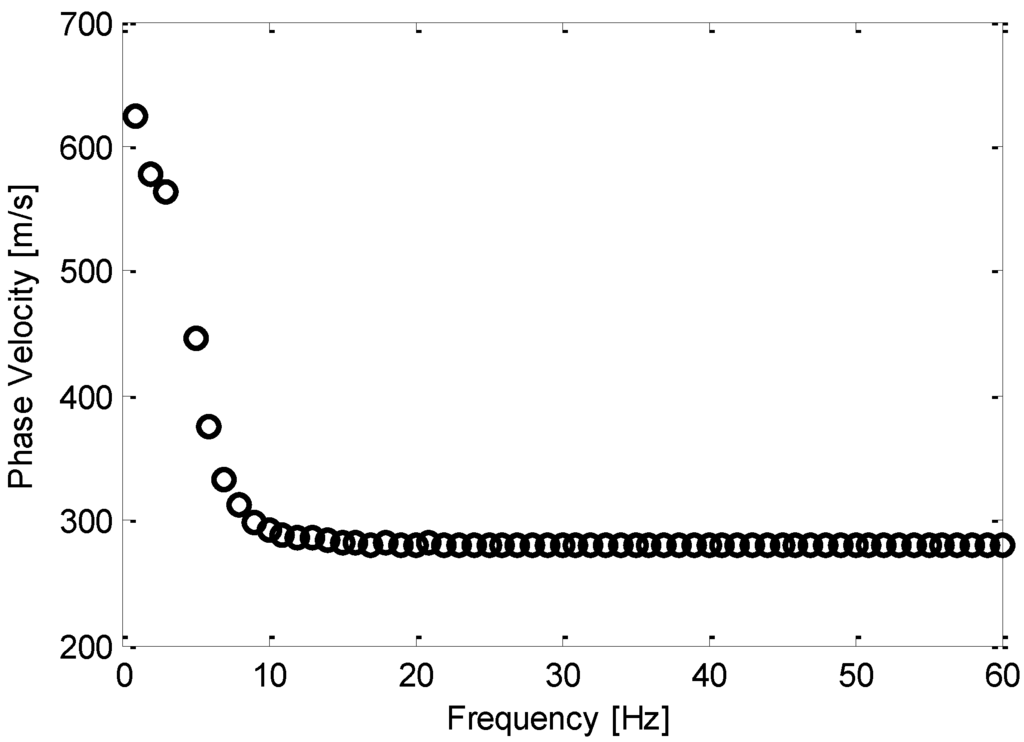
یک ساختار لایهای با سرعتهای برشی صعودی در امتداد عمق برای شبیهسازی یک سایت زمینشناسی معمولی انتخاب میشود. در این سناریو، سفتی لایه ها با عمق افزایش می یابد. دو لایه نرمتر روی خاک نیمهفضای بینهایت سختتر نشستهاند. جدول 1 پیکربندی لایه و خواص مواد را نشان می دهد. یک برنامه شبیه سازی رو به جلو بر اساس روش ماتریس سختی برای تجزیه و تحلیل انتشار موج توسعه یافته است. منحنی پراکندگی محاسبه شده با نتیجه توسط زومرودیان و همکاران مقایسه شده است. [ 18 ]، که از همان تنظیمات نمایه استفاده کردند. شکل 8 شبیه سازی رو به جلو منحنی پراکندگی را با روش ماتریس سختی نشان می دهد. می توان آن را از طریق منحنی پراکندگی در شکل 8 تأیید کردبا استفاده از برنامه توسعه یافته توسط نویسندگان، که با حالت اساسی غالب منحنی منتشر شده در شکل 6 a توسط Zomorodian و همکاران مطابقت دارد. ، دقیقا. بنابراین، منحنی پراکندگی محاسبه شده در این مقاله قابل اعتماد است.
جدول 1. ساختار لایه ای با مشخصات سرعت صعودی.
شکل 8. منحنی پراکندگی تحلیلی (حالت غالب).
شکل 9. پروفیل سرعت برشی معکوس در مقابل پروفیل اصلی برای پروفیل سختی صعودی. ( الف ) پروفیل برشی معکوس؛ و ( ب ) پروفیل برشی متوسط.
بر اساس منحنی پراکندگی تحلیلی با روش ماتریس سختی، پروفیل سرعت برشی با استفاده از الگوریتم وارونگی سریع پیشنهادی تخمین زده میشود. محاسبه وارونگی بسیار سریع در کمتر از یک ثانیه به پایان می رسد. نتایج با مشخصات داده شده در شکل 9 مقایسه شده است . از شکل 9 قابل مشاهده استالف که پروفیل سرعت برشی معکوس از روند کلی پروفیل اصلی پیروی می کند و بهترین مقدار را در لایه بالایی و لایه بی نهایت مطابقت دارد. همچنین از شکل نشان داده شده است که عمق لایه های معکوس مشابه اصلی نیست زیرا روش وارونگی به طور خودکار نقاط داده در منحنی پراکندگی را به عنوان لایه های نازک با گسسته سازی می گیرد. مقایسه بهتر با متوسط کردن پروفیل سرعت برشی معکوس در همان عمق پروفیل اصلی انجام می شود، همانطور که در شکل 9 ب نشان داده شده است. از مقایسه متوسط می توان دریافت که نتایج برای لایه بالایی و بینهایت بهترین دقت و لایه میانی دارای دقت کمتری است.
5.3. مشخصات سختی نزولی و محدودیت ها
یک سازه لایه لایه با سرعت های برشی نزولی در امتداد اعماق برای شبیه سازی سازه روسازی معمولی انتخاب شده است. دو لایه سختتر روی خاک نیمهفضای بینهایت نرمتر نشستهاند. جدول 2 پیکربندی لایه و خواص مواد را نشان می دهد.
جدول 2. ساختار لایه ای با مشخصات سرعت نزولی.
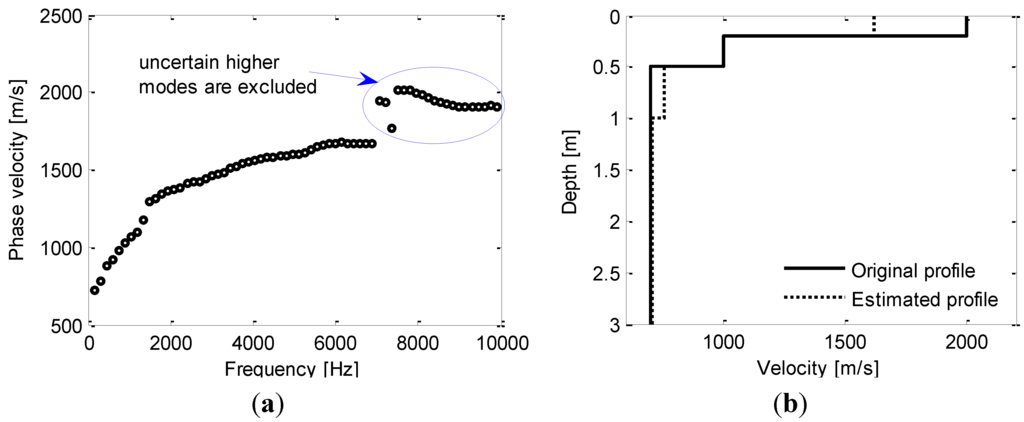
شکل 10 منحنی پراکندگی تحلیلی محاسبه شده و پروفیل سرعت برشی معکوس را در مقایسه با پروفیل اصلی در اعماق مشابه نشان می دهد. با توجه به انعکاس چند حالته در لایه های بالایی، حالت های بالاتر در تجزیه و تحلیل پراکندگی استخراج شد. از آنجایی که وارونگی پیشنهادی بر این فرض استوار است که حالت اساسی با نیمفضای همگن یا مشخصات سختی صعودی ظاهر و غالب است. بنابراین، سرعت فاز در حالت های بالاتر باید قبل از تجزیه و تحلیل وارونگی حذف شود تا از گمراهی جلوگیری شود. پس از حذف مودهای برتر غالب، مقایسه در شکل 10 ب نشان می دهد که پروفیل سرعت برشی معکوس به پروفیل اصلی به جز لایه بالایی تقریب دارد.
شکل 10. پروفیل سرعت برشی معکوس در مقابل پروفیل اصلی برای پروفیل سفتی نزولی. ( الف ) منحنی پراکندگی تحلیلی. و ( ب ) پروفیل برشی متوسط معکوس.
6. مقایسه با روش های دیگر
به منظور مقایسه بیشتر کارایی روش وارونگی سریع پیشنهادی، چند مسئله حل شده از ادبیات دیگر انتخاب شده و مجددا مورد تجزیه و تحلیل قرار می گیرند. منحنی های پراکندگی گزارش شده در این نمونه ها به عنوان ورودی تحلیل وارونگی با روش جدید پیشنهاد شده در این مقاله انتخاب شده اند. مشخص شد که الگوریتم وارونگی پیشنهادی تخمینهای بسیار مشابهی را با نتایج تمام نمونههای آزمایش شده ارائه میدهد. دو مثال و مقایسه معرف در زیر برای نشان دادن دقت الگوریتم وارونگی پیشنهادی ارائه شده است.
6.1. مثال 1
نمونه اول از گزارش تحقیق نظریان و همکاران انتخاب شده است. [ 7 ]. یک میدان زمین شناسی با روش SASW مورد آزمایش قرار گرفت. منحنی پراکندگی با توجه به اختلاف فاز بین دو ژئوفون ایجاد شد. فرآیند وارونگی بر اساس استراتژی حدس و بررسی تکراری با تحلیل تحلیلی رو به جلو بود. بسط دانکین از رویکرد هاسکل-توماس [ 29 ] به عنوان رویکرد تحلیلی رو به جلو استفاده شد.
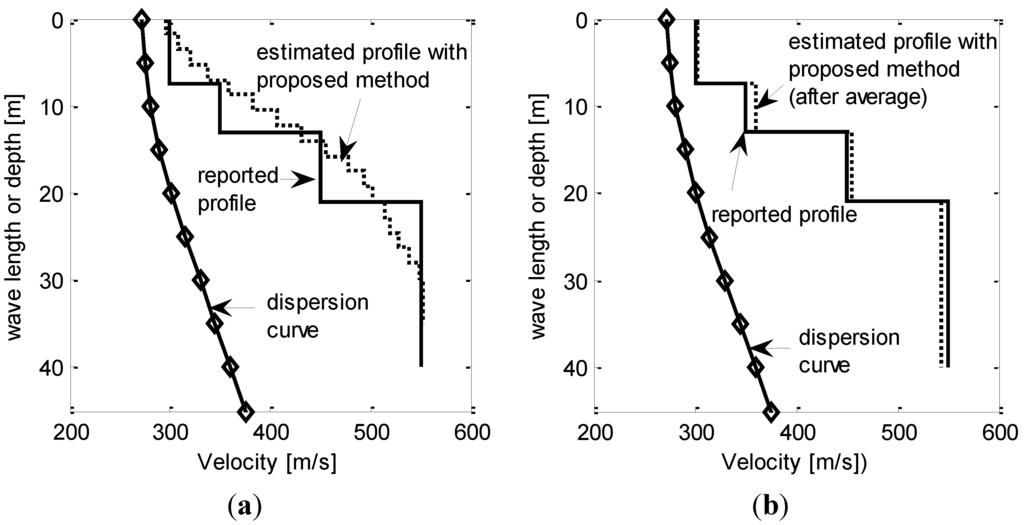
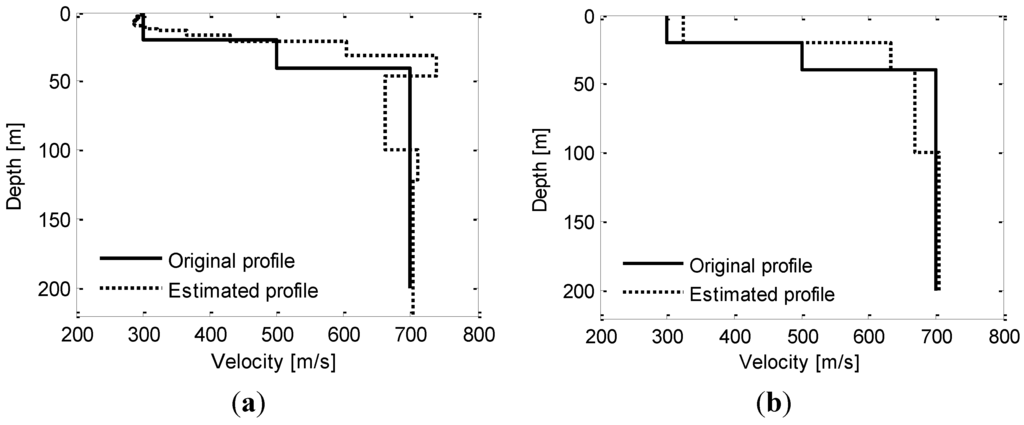
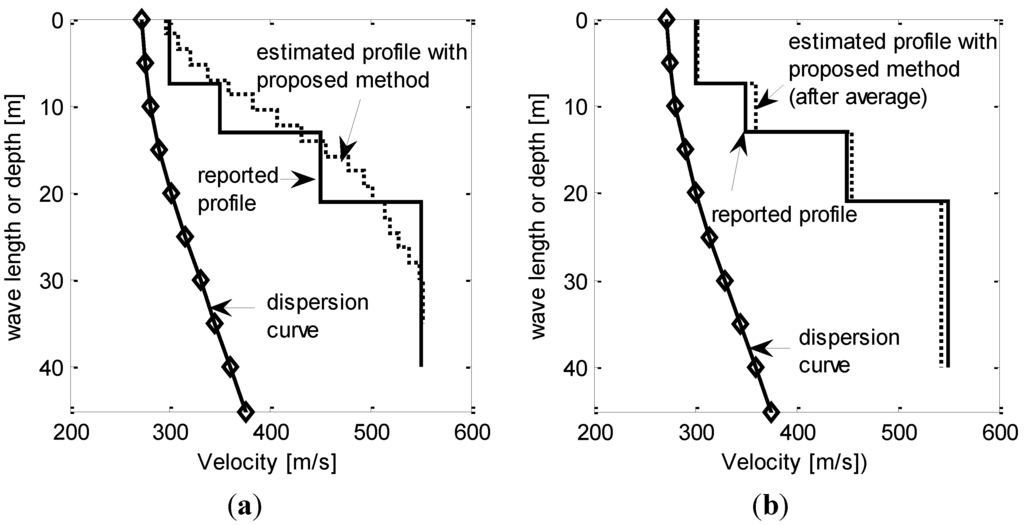
منحنی پراکندگی در شکل 11 از گزارش [ 7 ] اندازه گیری شده و به عنوان ورودی منحنی پراکندگی الگوریتم وارونگی پیشنهادی استفاده می شود. پروفیل جدید سرعت برشی تخمینی نیز در شکل 11 در مقایسه با برآورد گزارش شده رسم شده است. در شکل 11 الف مشاهده می شود که پروفیل سرعت برشی به طور خودکار تولید شده دارای طبقه بندی لایه های جزئیات بیشتری است. به منظور مقایسه بهتر با نتیجه گزارش شده، نمایه برآورد شده با توجه به عمق گزارش، همانطور که در شکل 11 ب نشان داده شده است، میانگین می شود. مطابق شکل 11 ب، مشخصات تخمینی و نمایه گزارش شده نزدیک به یکدیگر هستند.
شکل 11. پروفیل های سرعت برشی تخمینی با استفاده از الگوریتم وارونگی پیشنهادی. ( الف ) پروفیل سرعت برشی تولید شده به صورت خودکار. و ( ب ) پروفیل سرعت برشی متوسط. (مقیاس محور عمودی طول موج برای منحنی پراکندگی و عمق برای پروفایل است).
6.2. مثال 2
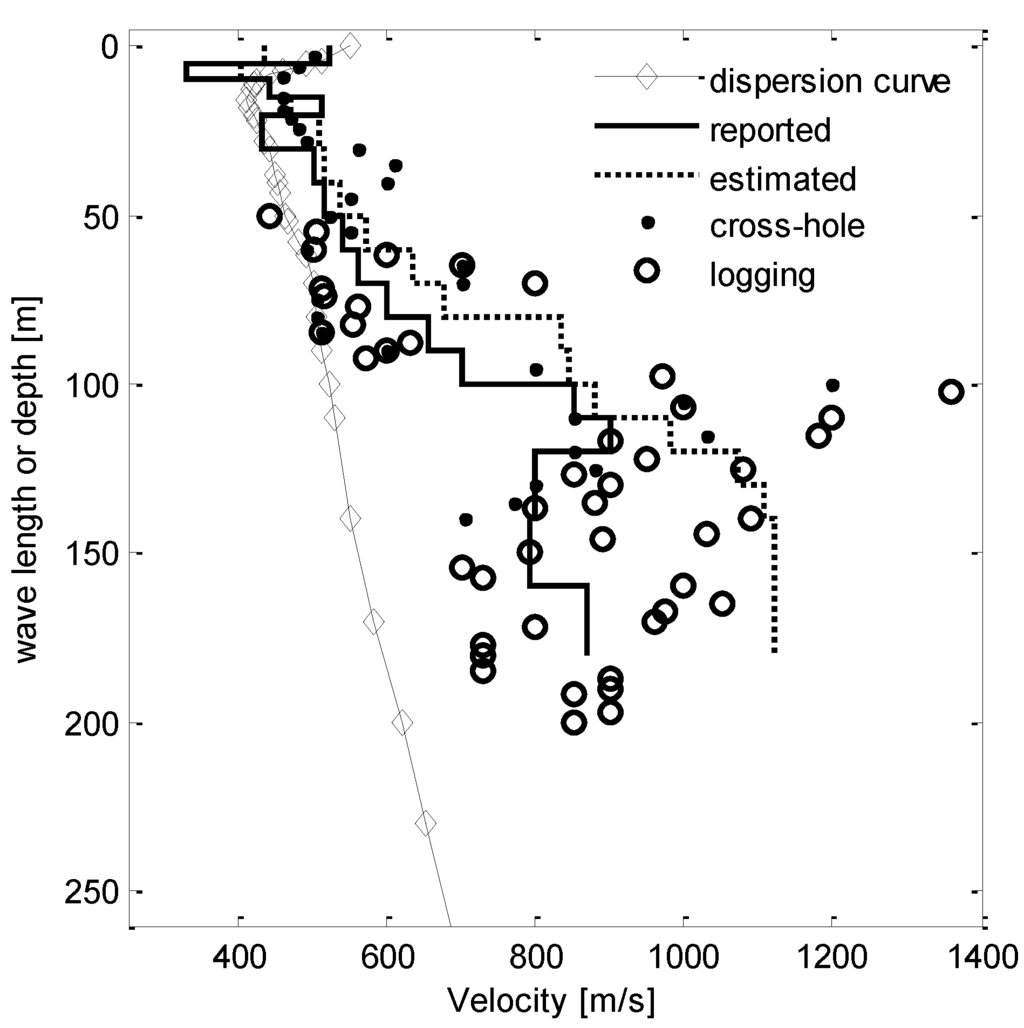
نمونه دوم از پایان نامه دکتری توسط Joh [ 8 ] انتخاب شده است. در این پایان نامه از یک وارونگی جهانی و یک استراتژی وارونگی آرایه برای افزایش کارایی وارونگی استفاده شده است. آزمایش SASW در محل پشت ایستگاه آتش نشانی در جزیره گنج انجام شد. سرعت های معکوس با نتایج تعیین شده توسط اندازه گیری سوراخ متقاطع و OYO * (GEO Instruments Corporation در ژاپن، کاواگوچی، ژاپن) تعلیق در پایان نامه به عنوان شکل 6.10 (ص 171)، شکل 6.13 (ص. 176)، مقایسه شد. و شکل 6.12 (ص 175) توسط Joh [ 8 ].
بر اساس همین منحنی پراکندگی، پروفیل سرعت برشی با روش وارونگی کار حاضر برآورد شده است. مشخصات برآورد شده در شکل 12 در مقایسه با نتایج گزارش شده در پایان نامه جو ترسیم شده است. از شکل 12 می توان مشاهده کرد که هر دو نمایه گزارش شده و تخمین زده شده در اطراف موقعیت های تعلیق متقاطع و OYO هستند. تفاوتهای بزرگتری نیز در اعماق عمیقتر بین نمایه گزارششده و تخمینی، و همچنین بین نتایج اندازهگیریشده ثبت سیستم تعلیق OYO یافت میشود. این نشان می دهد که نتایج روش وارونگی پیشنهادی دقت مشابهی با روش بکار رفته در پایان نامه جو دارد.
شکل 12. پروفیل های سرعت برشی تخمینی در مقایسه با نتیجه گزارش شده توسط Joh [ 8 ]. (مقیاس محور عمودی طول موج برای منحنی پراکندگی و عمق برای پروفایل است).
7. تست میدانی با الگوریتم وارونگی سریع
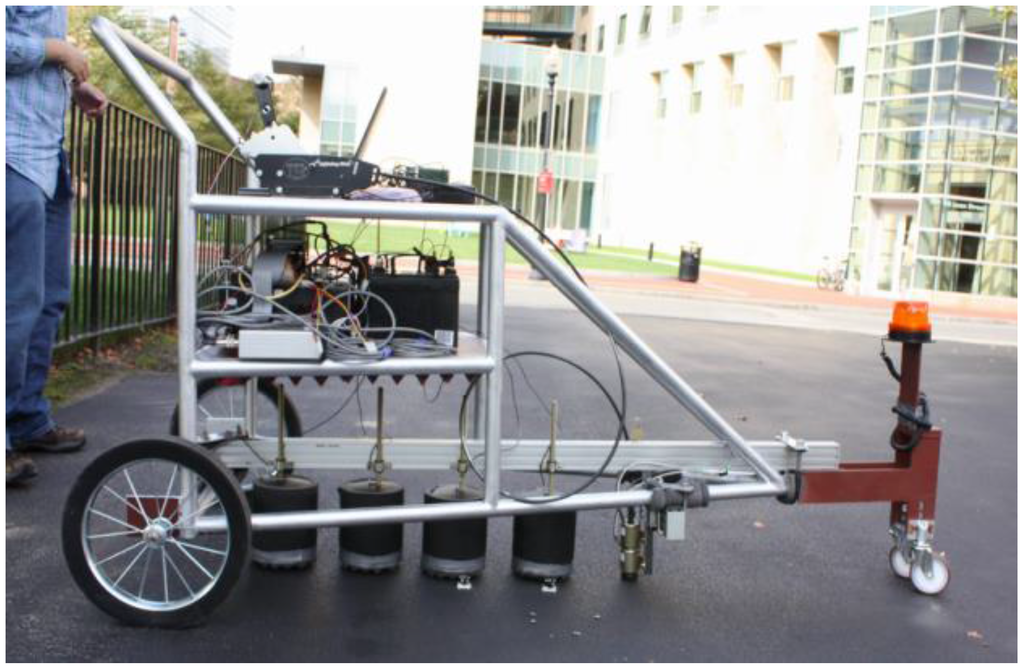
یک سیستم سنجش زیرسطحی آکوستیک متحرک (MASS) با استفاده از تکنیک SASW با هوا و الگوریتم وارونگی سریع پیشنهادی توسعه داده شده است [ 30 ]. تست های سیار با استفاده از سیستم سخت افزاری و نرم افزاری MASS توسعه یافته در پارکینگ آسفالت دانشگاه نورث ایسترن انجام می شود. مکان های آزمایش با چوب گچ با فاصله 60 سانتی متر از هم مشخص می شوند. آرایه میکروفون 1 سانتی متر بالاتر از سطح زمین در فاصله 20 سانتی متر قرار دارد. گاری در امتداد علائم گچ حرکت می کند و چکش در نقاط مشخص شده ضربه می زند. پنج ضربه در هر مکان اعمال می شود. نرخ نمونه برداری برای همه سنسورها روی 200 کیلوهرتز تنظیم شده است. کل سیستم توسط یک نفر اداره می شود، از جمله هل دادن چرخ دستی و کار با کنترل تست. شکل 13 سیستم آزمون و محل آزمون را نشان می دهد.
شکل 13. تست موبایل در پردیس دانشگاه شمال شرقی.
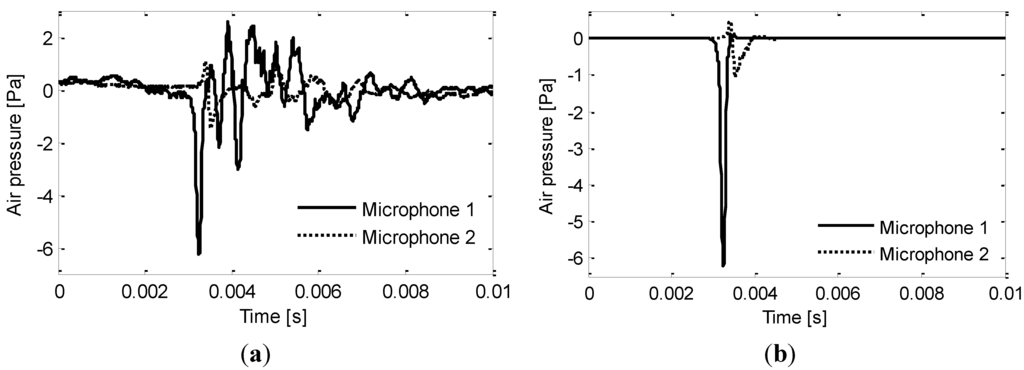
شکل 14 تاریخچه زمانی برخورد چکش در پارکینگ را نشان می دهد. موج صوتی تابش شده توسط امواج سطحی در دو میکروفون به فاصله 40 سانتی متر با اعمال پنجره هانینگ بر روی داده های خام استخراج می شود. اندازه پنجره اولین کانال دو برابر طول زمانی حداقل مقدار پیک تصمیم گرفته شده است. اندازه پنجره کانال دوم به اندازه کانال اول به اضافه زمان حرکت صدای چکش بین دو کانال در سرعت آکوستیک است. از شکل 14 ب می توان مشاهده کرد که موج سطحی تابشی استخراج شده نسبتاً صاف است و ویژگی های آن را به طور مناسب نشان می دهد.
شکل 14. داده های میکروفون تست پارکینگ: ( الف ) داده های صوتی خام. و ( ب ) موج سطحی تابش فیلتر شده.
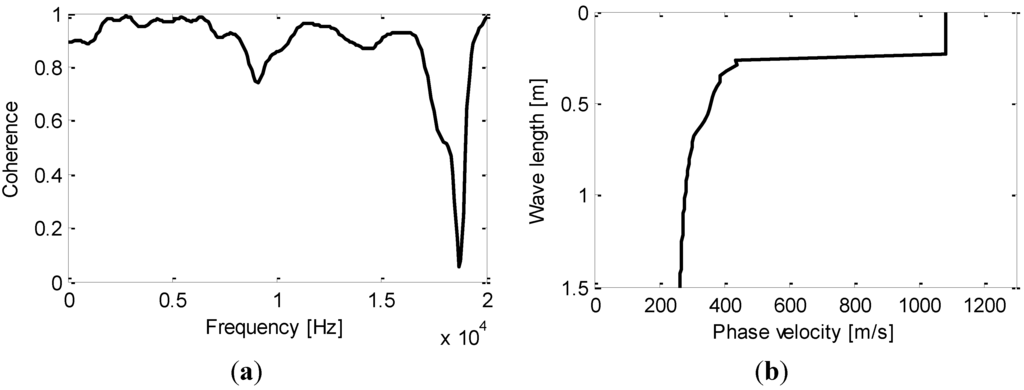
شکل 15 منحنی انسجام و پراکندگی بین دو کانال میکروفون را نشان می دهد. از شکل 15 الف می توان دریافت که انسجام خوب می تواند بالای 0.9 تا 8000 هرتز باشد. منحنی پراکندگی موثر برای این باند فرکانسی محاسبه شده و در شکل 15 ب نشان داده شده است. برای تحقق قوی الگوریتم وارونگی، منحنی پراکندگی باید از سطح (به عنوان عمق صفر) شروع شود. بنابراین، سرعت فاز در عمق کمتر نامشخص (فرکانس بالای 8000 هرتز) با اولین عمق شناساییشده یکسان فرض میشود. این فرض را می توان از بخش عمودی ناگهانی در بالای منحنی پراکندگی در شکل 15 ب مشاهده کرد.
شکل 15. ( الف ) تابع انسجام. و ( ب ) منحنی پراکندگی.
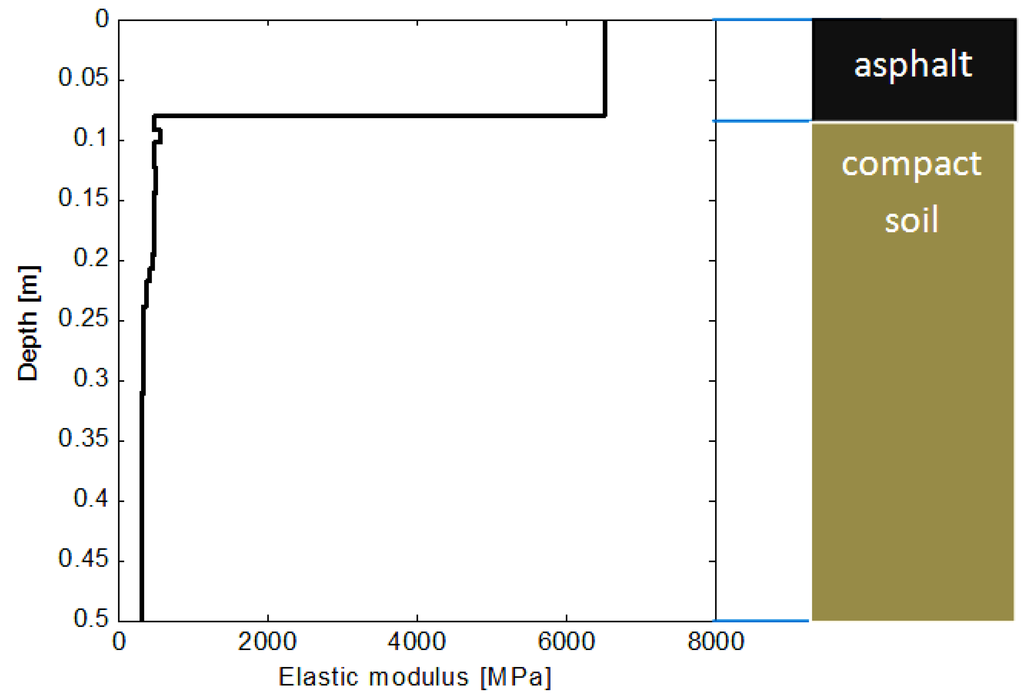
مشخصات نهایی برآورد شده مدول الاستیک در شکل 16 ارائه شده است . چگالی جرم 1800 کیلوگرم بر متر مکعبو نسبت پواسون 0.3 به عنوان مقادیر استاندارد برای آسفالت در محاسبه مدول الاستیک استفاده شد. طبق پروفیل، اولین لایه آسفالت دارای عمق تخمینی 0.08 متر و مدول الاستیک تخمینی 6500 مگاپاسکال است که در محدوده یک ماده بتن آسفالت معمولی از 4400 MPa تا 6800 MPa قرار میگیرد. با این حال، با مقایسه مقدار تخمینی، 324 مگاپاسکال، در عمق 0.4 متر با محدوده 65 تا 130 مگاپاسکال برای خاک فشرده معمولی، دقت تخمین در این عمق به دلیل گسسته شدن لایه های نازک خوب نیست. با این حال، منحنی مدول الاستیک به محدوده استاندارد برای خاک فشرده به عنوان روند کلی نزدیک می شود. با مزایای تجزیه و تحلیل سریع در تست های میدانی، الگوریتم پیشنهادی هنوز قابلیت وارونگی کارآمد را نشان می دهد.
شکل 16. پروفیل مدول الاستیک تخمینی در تست پارکینگ.
8. نتیجه گیری و کار آینده
تجزیه و تحلیل طیفی موج سطحی (SASW) روشی است که به طور گسترده برای پروفایل زیرسطحی در مطالعات زمین شناسی و همچنین مهندسی عمران انجام می شود. SASW کوپل شده با هوا یک افزونه امیدوارکننده برای بازرسی سریع بدون تماس است. تاکنون، این روشها به دلیل روش تست با راندمان پایین و الگوریتم وارونگی تا حد زیادی به عنوان یک آزمون ثابت نقطه به نقطه محدود شدهاند. یک الگوریتم وارونگی سریع در این مقاله بر اساس رابطه اساسی بین سرعت ذرات، سرعت برشی و سرعت فاز موج سطحی پیشنهاد شده است. سرعت فاز به صورت ترکیب وزنی از سرعت های برشی لایه های زیرسطحی در عمق نفوذ شده توسط موج سطحی با طول موج معین بیان می شود. سپس یک روش تکراری برای معکوس کردن مشخصات سرعت برشی از منحنی پراکندگی اندازهگیری شده ایجاد میشود. دقت این روش وارونگی با استفاده از منحنی پراکندگی تحلیلی برای ساختارهای لایهای داده شده از طریق روش ماتریس سختی تأیید میشود. همچنین از طریق دو مثال در مقایسه با نتایج گزارش شده توسط سایر محققان نشان داده شده است. از آنجایی که الگوریتم وارونگی پیشنهادی فقط عبارات جبری است و بنابراین بسیار سریع است، فرصت های بیشتری را برای روش SASW همراه با هوا به عنوان یک روش بازرسی سریع یا حتی زمان واقعی در آینده ارائه می دهد.
هنگام اعمال الگوریتم پیشنهادی، چندین محدودیت مشاهده می شود. رابطه ترکیبی وزنی پیشنهادی بین پروفیل سرعت برشی و سرعت فاز بر اساس حالت اساسی موج سطحی است. فقط حالت اساسی منحنی پراکندگی کامل در محاسبه اعمال می شود. برای سناریوهایی که سختی با عمق بالا می رود، مانند مکان های زمین شناسی، وارونگی پیشنهادی به خوبی کار می کند. برای سناریوهایی که پاسخ ضربه ای زمین تحت تأثیر ارتعاشات چند حالته به دلیل پوشش های سفت تر بالای پایه نرم تر و مواد زیر درجه، مانند روسازی بزرگراه، پاسخ های حالت بالاتر غالب هستند. در این مورد، تکنیک های پیشرفته ای برای استخراج منحنی پراکندگی حالت اساسی مورد نیاز است تا این الگوریتم به طور مناسب اعمال شود. نامزدهای این روش های پیش پردازش شامل فیلتر گابور است. راه حل دیگر کمک وارونگی موج بره برای کنترل حالت های بالاتر غالب برای لایه های بالایی سفت است. در کارهای آینده، این تلاش ها باید به عنوان نوعی الگوریتم پیش پردازش در زمان واقعی تعبیه شوند.






بدون نظر