

خلاصه
روشهای حملونقل غیرموتوری، بهویژه دوچرخهسواری و پیادهروی، مزایای متعددی از جمله بهبود زیستپذیری شهرها، فعالیت بدنی سالم، سیستمهای حملونقل شهری کارآمد، تراکم ترافیک کمتر، آلودگی صوتی کمتر، هوای پاک، تأثیر کمتر بر تغییرات اقلیمی و کاهش را ارائه میکنند. در بروز بیماری های مربوط به گازهای گلخانه ای وسایل نقلیه. با توجه به تعداد قابل توجهی از سفرهای کوتاه مدت، زمان صرف شده در ترافیک، هزینه های بالاتر برای پارک وسایل نقلیه و محدودیت ها در مناطق تجاری مرکزی، بسیاری از مسافران دریافته اند که روش های حمل و نقل غیر موتوری به عنوان جایگزین های حمل و نقل مناسب و اقتصادی عمل می کنند. بنابراین، دولت های محلی باید شیوه های حمل و نقل غیرموتوری را تشویق و تشویق کنند. در عوض، دولت ها باید شرایط ایمن را برای این اشکال حمل و نقل فراهم کنند و کاربران وسایل نقلیه موتوری باید به عابران پیاده و دوچرخه سواران که آسیب پذیرترین کاربران سیستم حمل و نقل هستند احترام بگذارند و با آنها همزیستی کنند. اگرچه هدف روندهای فعلی در حمل و نقل پایدار تشویق و تحریک روش های حمل و نقل غیر موتوری است که از نظر اجتماعی کارآمدتر از حمل و نقل موتوری هستند، سیاست های ایمنی کمی در مورد کاربران آسیب پذیر جاده (VRU) به طور عمده در مراکز بزرگ شهری اجرا شده است. با توجه به ماهیت فضایی داده های مورد استفاده در مطالعات مربوط به حمل و نقل، فناوری های جغرافیایی یک روش تحلیلی قدرتمند برای مطالعه چارچوب های ایمنی VRU از طریق استفاده از تجزیه و تحلیل فضایی ارائه می کنند. در این مقاله، تجزیه و تحلیل فضایی برای تعیین مکان مناطقی که با تمرکز تصادفات ترافیکی (مناطق سیاه) شامل VRU (مصدومات و تلفات) در سائوپائولو، برزیل (کشور در حال توسعه) و رم، ایتالیا (کشور توسعهیافته) مشخص میشوند، استفاده میشود. مناطق سیاه برای به دست آوردن الگوهای فضایی که می تواند باعث تصادفات متعدد شود، بررسی می شود. یک روش مبتنی بر تخمین تراکم هسته (KDE) برای مقایسه دو شهر و نشان دادن تفاوتها و/یا شباهتهای اقتصادی، اجتماعی، فرهنگی، جمعیتی و جغرافیایی و نحوه ارتباط این عوامل با مکانهای تصادفات ترافیکی VRU استفاده میشود. تحلیلهای رگرسیون چند متغیره (مدلهای حداقل مربعات معمولی (OLS) و مدلهای رگرسیون فضایی) برای بررسی همبستگیهای فضایی انجام میشوند. برای درک پویایی تصادفات جاده ای VRU در سائوپائولو و رم و شناسایی عوامل (متغیرها) که در وقوع این رویدادها نقش دارند، مانند وجود قطب های تولید کننده سفر (TGH)، تعداد سفرهای شهری تولید شده و داده های جمعیتی . روش اتخاذ شده نتایج رضایتبخشی را برای شناسایی و تعیین نقاط سیاه و ایجاد ارتباط بین نرخ تصادفات رانندگی VRU و TGH (بیمارستانها، دانشگاهها و مراکز خرید خردهفروشی) و دادههای جمعیتی و مرتبط با حمل و نقل ارائه میدهد.
کلید واژه ها:
تحلیل فضایی ; تخمینگر چگالی هسته ; کاربران آسیب پذیر جاده ; حوادث رانندگی ؛ هاب های ژنراتور سفر
1. معرفی
یکی از عناصر کلیدی سیستم های حمل و نقل مدرن ایمنی است. هدف ایمنی به حداقل رساندن تعداد تصادفات و کاهش شدت صدمات برای همه کاربران، از جمله رانندگان، مسافران وسایل نقلیه خاص، مسافران حمل و نقل عمومی، دوچرخه سواران و عابران پیاده است [ 1 ، 2 ].
تصادفات رانندگی دومین هزینه حمل و نقل را به همراه دارد. این هزینهها ناشی از آسیبهای شخصی (جراحات و جراحات)، تلفات جانی، خسارت مالی (به وسایل نقلیه و سایر اموال عمومی یا خصوصی)، کاهش کیفیت زندگی و کاهش زمان در دسترس برای انجام فعالیتها و حفظ روابط اجتماعی است [ 3 ، 4 ، 5 ]. ].
روشهای حملونقل غیرموتوری، بهویژه دوچرخهسواری و پیادهروی، مزایای متعددی از جمله بهبود زیستپذیری شهرها، فعالیت بدنی سالم، سیستم حملونقل شهری کارآمد، تراکم ترافیک کمتر، آلودگی صوتی کمتر، هوای پاک، تأثیر کمتر بر تغییرات آب و هوایی را ارائه میکنند. کاهش بروز بیماریهای مرتبط با گازهای گلخانهای از وسایل نقلیه، کاهش مصرف سوختهای فسیلی و کاهش هزینههای حمل و نقل. با توجه به تعداد قابل توجهی از سفرهای مسافت کوتاه، زمان مصرف شده در ترافیک، هزینه های بالاتر پارکینگ وسایل نقلیه و محدودیت ها در مناطق تجاری مرکزی، بسیاری از مسافران دریافته اند که روش های حمل و نقل غیرموتوری جایگزین های حمل و نقل مناسب و اقتصادی هستند [ 6 ].
بنابراین، شیوه های حمل و نقل غیرموتوری باید توسط دولت های محلی تحریک و تشویق شوند. در مقابل، دولت ها باید شرایط ایمن را برای این کاربران و استفاده کنندگان از حمل و نقل موتوری فراهم کنند که به حمل و نقل موتوری اجازه دهد هماهنگ با عابران پیاده و دوچرخه سواران وجود داشته باشد. برنامه ریزان و مهندسان باید با طراحی امکانات حمل و نقل برای مناطق شهری نیازهای دوچرخه سواران و عابران پیاده را برآورده سازند [ 7 ].
به طور گسترده ای شناخته شده است که عابران پیاده و دوچرخه سواران آسیب پذیرترین کاربران سیستم حمل و نقل هستند. اگرچه هدف روندهای فعلی در حمل و نقل پایدار تشویق و تحریک روشهای غیرموتوری حملونقل است که از نظر اجتماعی کارآمدتر از حالتهای موتوری هستند، سیاستهای ایمنی کمی در ارتباط با کاربران آسیبپذیر جاده (VRU) (شرکتکنندگان در ترافیک بدون سلولهای محافظ بیرونی) [ 8 ]] در مراکز بزرگ شهری اجرا شده است. بنابراین، ترویج یک چارچوب مفهومی ایمنی جاده برای کاهش و کنترل خطرات تصادفات مربوط به VRU مهم است. خطرات (خطر تصادف و شدت جراحت) ناشی از رفتار سفر (حجم، تقسیم مودال و توزیع ترافیک در طول زمان و مکان) و ویژگیهای زیرساخت حملونقل، مانند نوع وسیله نقلیه و کاربر جاده است [ 9 ].
چارچوب ایمنی جاده برای VRU تحت تأثیر کاربری زمین و زیرساخت شهری (محیط ساخته شده) قرار دارد. این چارچوب یک انتزاع یا سادهسازی واقعیت است که میتواند برای کمک به برنامهریزان، سیاستگذاران و تصمیمگیران برای درک بهتر سیستمهای دنیای واقعی، تسهیل ارتباطات و یکپارچهسازی دانش در میان رشتههای مختلف مهندسی و علمی، از جمله علوم حملونقل، جغرافیا، شهری استفاده شود. برنامه ریزی، اقتصاد و فیزیک [ 9 ، 10 ].
با توجه به ماهیت فضایی دادههای درگیر در مطالعات مربوط به حملونقل، فناوریهای مکانی یک روش تحلیلی قدرتمند برای مطالعه چارچوبهای ایمنی VRU از طریق استفاده از تحلیل فضایی ارائه میکنند. توسعه سریع علم اطلاعات جغرافیایی و فناوری های مرتبط با آن منجر به جمع آوری داده های حمل و نقل فراوان برای درک بهتر الگوهای تصادفات ترافیکی جاده ای و رفتارهای کاربران سیستم حمل و نقل شده است [ 10 ]. علاوه بر این، در دسترس بودن دادههای ترافیکی بیدرنگ بهدستآمده از طریق فناوریهای مکانی، افزایش یافته و مدیریت ایمنی پیشگیرانه را در شبکههای حملونقل تحریک کرده است [ 11 ].]. برخلاف رویکردهای مرسوم، روشهای مکانی برای تحلیل الگوهای فضایی مکانهای تصادف در یک فضای شبکه استفاده میشوند و تحت تأثیر پیکربندی شبکه خیابان یا فاصله آن قرار نمیگیرند [ 12 ]. طی چند سال اخیر، شناسایی مکانهای پرخطر که به آن مناطق لکه سیاه میگویند، در شبکههای جادهای پیشرفت چشمگیری داشته است. شناسایی مناطق لکههای سیاه با استفاده از فناوریهای مکانی در تحقیقات حملونقل تسهیل میشود که بومیسازی دقیق حوادث ترافیکی و شناسایی الگوهای فضایی شامل مناطق با وقوع بالای حوادث ترافیکی را امکانپذیر کرده است [ 13 ].
هدف این مطالعه تعیین مکانهای مناطق (که شامل بخشهای جادهای حیاتی است) است که با تمرکز تصادفات رانندگی (مناطق سیاه) شامل VRU (مصدومات و تلفات) در سائوپائولو، برزیل (کشور نوظهور) مشخص میشود. و رم، ایتالیا (کشور توسعه یافته). مناطق سیاه برای به دست آوردن الگوهای فضایی که منجر به تصادفات متعدد می شود، بررسی می شوند. یک روش مبتنی بر تخمین تراکم هسته (KDE) برای تجزیه و تحلیل الگوهای اقتصادی، اجتماعی، فرهنگی، جمعیتی و جغرافیایی تصادفات جادهای شهری در سائوپائولو و رم و برای بررسی چگونگی ارتباط این عوامل با مکانهای تصادفات ترافیکی VRU استفاده میشود. علاوه بر این، برای درک فعل و انفعالات فضایی که بین حوادث ترافیکی VRU و مکان آنها رخ می دهد، تحلیلهای رگرسیون چند متغیره (مدلهای حداقل مربعات معمولی (OLS) و مدلهای رگرسیون فضایی) انجام میشوند. علاوه بر این، این تحلیلها برای تعیین مهمترین ویژگیهایی انجام میشوند که به نرخ بالای تصادفات VRU در یک منطقه معین کمک میکنند.
2. پس زمینه
این بررسی ادبیات عمدتاً سه جنبه مربوط به توصیف فضایی نقاط داغ شامل VRU، تحقیقات تصادفات ترافیکی، حوادث مربوط به VRU و تجزیه و تحلیل فضایی این حوادث را مورد بحث قرار میدهد.
2.1. تحقیق در مورد تصادفات رانندگی
یکی از مشکلات بسیار نگران کننده سیستم های حمل و نقل مربوط به تصادفات است. حوادث ترافیکی جاده ای منجر به مشکلات جدی اجتماعی با هزینه های قابل توجه فردی، اموال و اجتماعی می شود [ 2 ، 14 ]. سازمان بهداشت جهانی (WHO) نشان میدهد که آسیبهای ترافیکی جادهای یک مشکل عمده سلامت عمومی جهانی است که نادیده گرفته شده است که نیاز به اقدام برای پیشگیری مؤثر و پایدار دارد [ 15 ]. بر اساس گزارش سازمان جهانی بهداشت، در سال 2010، 1.24 میلیون نفر در سراسر جهان به دلیل تصادفات رانندگی کشته شدند. کشورهای با درآمد متوسط، که به سرعت در حال موتور شدن هستند، بیشترین آسیب را از سوانح رانندگی میبینند، به طوری که تقریباً 70 درصد از مرگهای ناشی از ترافیک در این کشورها رخ میدهد [ 16 ، 17 ]]. این سناریوی غم انگیز نشان می دهد که حوادث ترافیکی یک نگرانی جدی بهداشت عمومی و رفاه است و می تواند به عنوان یک اپیدمی جهانی در نظر گرفته شود [ 12 ]. هزینه مقابله با پیامدهای این حوادث ترافیکی به میلیاردها دلار می رسد [ 17 ] که مبلغ زیادی است که می تواند در سیستم حمل و نقل برای جلوگیری از حوادث ترافیکی استفاده شود. نیمی از مرگ و میر ناشی از تصادفات جاده ای شامل VRU [ 17 ] است. در برزیل، در سال 2010، 4 درصد از افرادی که در اثر تصادفات رانندگی جان خود را از دست دادند دوچرخه سوار و 23 درصد عابران پیاده بودند [ 18 ].
محیط های کاربری زمین بر نیازها و رفتارهای VRU تأثیر می گذارد. انتخاب حالت حمل و نقل (غیر موتوری یا موتوری) بسته به نوع کاربری زمین متفاوت است. به عنوان مثال، تعداد دوچرخه های پارک شده در ایستگاه های حمل و نقل، درصد زمین برای استفاده تجاری، فواصل بین مبدا و مقصد و نزدیکترین ایستگاه اتوبوس با خدماتی که ایستگاه حمل و نقل را ارائه می دهد، بر تصمیم گیری در مورد نحوه حمل و نقل تأثیر می گذارد. این عوامل در هنگام ترویج حمل و نقل غیر موتوری تأثیرگذار هستند. علاوه بر این، مهم ترین نگرانی در مورد حمل و نقل غیر موتوری، خطر تصادفات رانندگی است. خطر تصادف با سطح و نوع ترافیک محلی متفاوت است. خطر تصادفات ترافیکی مهمترین نگرانی برای VRU در مراکز شهری است [ 19 ].
در سال های اخیر، تعداد فزاینده ای از مطالعات تحقیقاتی در رابطه با الگوهای تصادفات رانندگی از طریق رویکردهای فضایی انجام شده است. رویکردی (شبیه به آنچه در این مطالعه توسعه داده شد) توسط [ 20 ] انجام شد که بخشهای جادهای را که با تمرکز تصادفات ترافیکی (مناطق سیاه) مشخص میشوند، با اعمال و مقایسه دو روش، شاخصهای خودهمبستگی فضایی محلی (تجزیه شاخص جهانی موران) و KDE، بدون هیچ اشاره ای به الگوهای فضایی حوادث. در مطالعه ارائه شده توسط [ 21] از یک سیستم اطلاعات جغرافیایی (GIS) و مدل لاگ خطی برای بررسی توزیع فضایی تصادفات عابر پیاده/دوچرخه سوار که شامل کودکان مدرسهای در فلوریدا، ایالات متحده آمریکا بود، استفاده شد و شرایطی را که تحت آن احتمال وقوع این رویدادها بیشتر بود، بررسی کرد. در تحقیق انجام شده توسط [ 13 ] رویه ای برای شناسایی و ارزیابی خوشه ها (مناطق نقطه سیاه) تصادفات رانندگی با استفاده از KDE در منطقه موراویای جنوبی جمهوری چک ایجاد شد. تجزیه و تحلیل مکانی و زمانی حوادث ترافیکی VRU در سانتیاگو، شیلی، توسط [ 22 ] انجام شد.]، به منظور شناسایی بحرانی ترین مناطق (مناطق نقطه سیاه) در یک محیط GIS (با استفاده از KDE و Moran Index)، و همچنین برای شناسایی ویژگی ها و عوامل مؤثر (به عنوان مثال، زمان روز، بخش های جاده مستقیم و تقاطع ها و جاده های بدون علائم راهنمایی و رانندگی در مناطق بحرانی) مرتبط با حوادث ترافیکی VRU. روابط بین سه سال تصادف عابر پیاده در سراسر مناطق سرشماری در آستین، تگزاس (ایالات متحده آمریکا) و چندین شبکه کاربری زمین و ویژگی های جمعیتی، مانند تعادل کاربری زمین، دسترسی ساکنان به کاربری های تجاری، تراکم پیاده رو، مایل خط تراکم (براساس کلاس جاده) و تراکم جمعیت و اشتغال (بر اساس نوع) توسط [ 23 ] مورد بررسی قرار گرفت. مطالعه ای توسط [ 24]، که یک تجزیه و تحلیل تراکم فضایی (KDE) و شاخص موران محلی را برای شناسایی نقاط سیاه تصادفات و ارزیابی رسمی گستردگی مکانهای با تراکم بالا برای ارائه ابزار و اطلاعات برای برنامهریزان و تصمیمگیرندگان به منظور تخصیص مؤثر منابع پیشگیری از تصادف و بهبود ایمنی تجزیه و تحلیل مکانی-زمانی تصادفات جاده ای در نیوبرانزویک، کانادا، برای مطالعه اثرات تغییرات آب و هوا بر حوادث ترافیکی خطرناک مربوط به آب و هوا توسط [ 25 ] ارائه شد. علاوه بر این، یک تجزیه و تحلیل فضایی (KDE و تجزیه و تحلیل موجک) برای شناسایی مناطق لکه سیاه حوادث ترافیکی و تأیید الگوهایی که در تصادفات رخ داده در مناطق لکه سیاه در ایالت پارانا، برزیل نقش داشته اند، توسط [ 26 ] اعمال شد.]. یک تحلیل مکانی-زمانی از تصادفات ترافیکی درون شهری در کلانشهر شیراز، ایران، توسط [ 27 ] ارائه شد که هدف آن شناسایی مناطق حادثه خیز و ساعات حساس با استفاده از تکنیک های تجسم مکانی-زمانی مبتنی بر GIS بود. این تجزیه و تحلیل با هدف شناسایی مکان های تصادف با نرخ بالا و مناطق دارای کمبود ایمنی با استفاده از روش KED انجام شده است. یک رویکرد مدلسازی بیزی فضایی توسط [ 28 ] برای پیشبینی خطرات تصادف VRU برای یک شبکه جادهای و شناسایی چگونگی تأثیر زیرساختهای جاده بر ایمنی VRU در بروکسل، بلژیک، پیشنهاد شد. رویکردی توسط [ 29] برای شناسایی مناطق حادثه خطرناک که روش های فضایی و غیر مکانی را مقایسه می کند. به طور کلی، این مطالعه نتیجه میگیرد که روشهای تحلیل فضایی بهتر از رویکردهای غیرمکانی عمل میکنند، زیرا به تقسیمبندی بزرگراهها نیاز ندارند. تنها اطلاعاتی که هنگام استفاده از روش تحلیل فضایی برای شناسایی مناطق لکه سیاه مورد نیاز است، مکان هر حادثه است.
2.2. حوادث ترافیکی VRU
در کشورهای در حال توسعه، تصادفات مربوط به VRU نسبت به کشورهای توسعه یافته، بخش بسیار بیشتری از تمام تلفات و جراحات مرتبط با ترافیک را تشکیل می دهند. مطالعات و مشاهدات نشان داده است که بخش بزرگی از صدمات و تلفات VRU در تقاطع های شهری (تقریبا یک سوم) و در برخورد با خودروها (حدود دو سوم) رخ می دهد. بیشتر حوادث VRU ناشی از ترکیبی از عوامل رفتاری، تکنولوژیکی و محیطی است که نشان می دهد ایمنی VRU باید بهبود یابد. در کشورهای در حال توسعه، ایمنی را می توان با اتخاذ اصول ایمنی که تعداد جراحات و تلفات ناشی از تصادفات VRU را در کشورهای توسعه یافته کاهش داده است، مانند طراحی جاده و مدیریت ترافیک مناسب، بهبود بخشید [ 30 ، 31 ].].
ویژگی های ترافیک مختلط، توانایی ناکافی رانندگی رانندگان وسایل نقلیه، رفتار کاربران سیستم حمل و نقل (رانندگان وسایل نقلیه موتوری و غیر موتوری، مسافران و عابران پیاده)، عوامل وسیله نقلیه (مانند نگهداری ناکافی)، طراحی نامناسب و چیدمان جاده ها و سایر زیرساخت های حمل و نقل و شرایط آب و هوایی اغلب ترافیک یک کشور را ناامن می کند و می تواند بر وقوع تصادفات تأثیر بگذارد. در حالی که این عوامل در کشورهای با درآمد پایین/متوسط رایج هستند، زیرا مهندسی خودرو، طراحی جاده و وسایل نقلیه با کیفیت بالا به طور مداوم در کشورهای توسعه یافته از نظر ایمنی بهینه می شوند، علل انسانی به عنوان عوامل اصلی تصادفات رانندگی VRU در نظر گرفته می شوند. بدین ترتیب،8 ].
سیاست های عمومی (بودجه و تعهد دولت برای ایمنی حمل و نقل و میزان اجرای قوانین ترافیک جاده ای)، ویژگی های فردی (سلامت و وضعیت جسمانی، درآمد، تحصیلات، سن و جنسیت)، شرایط اجتماعی-اقتصادی (رشد اقتصادی) و جمعیتی و جغرافیایی شرایط (متوسط مسافت طی شده، مقدار زمان طی شده و تراکم جمعیت) عواملی هستند که بر میزان تصادفات رانندگی VRU تأثیر میگذارند [ 16 ]. در نتیجه، درک این عوامل مختلف و شناسایی اثرات مجزا و/یا ترکیبی آنها بر فراوانی و شدت تصادف مهم است [ 11 ].
2.3. تجزیه و تحلیل فضایی حوادث VRU
شناسایی نقاط داغ تصادفات جاده ای (مناطق نقاط سیاه) برای تعیین استراتژی های موثر برای کاهش مناطق با تراکم بالای تصادفات و برای تخصیص مناسب منابع برای بهبود ایمنی مهم است [ 32 ]. ویژگیهای تحلیل فضایی (محیط GIS) برای مدیریت و پردازش اطلاعات مکانی و مرتبط، درک قوی از شاخصهای اثرات اتفاقی را فراهم میکند. در میان چندین تکنیک، تکنیک KDE یکی از پرکاربردترین ابزارهای فضایی برای مطالعه پدیده تصادفات ترافیکی است، همانطور که توسط [ 2 ، 13 ، 24 ، 27 ، 32 ، 33 ، 34 ، 35 نشان داده شده است., 36 , 37 , 38 , 39 , 40 ].
تکنیک KDE برای محاسبه تابع چگالی احتمال توزیعی که یک نمونه از آن مشاهده شده است با مرکزیت کردن تابع چگالی احتمال بر روی هر یک از رویدادهای مشاهده شده استفاده می شود [ 41 ]. تخمینگر هسته یک الگوریتم ناپارامتریک است که از روش تخمین چگالی استفاده میکند. این تکنیک به فرد امکان می دهد تا وقوع تصادف احتمالی محلی و در نتیجه، خطر احتمالی یک واحد فضایی را ارزیابی کند [ 20 ]. KDE پرکاربردترین روش ناپارامتریک در دهههای اخیر است [ 42]. KDE توزیع مکان یک رویداد را توصیف می کند و ارتباط آن با مقادیر را نادیده می گیرد. این توزیع با تراکم رویدادهایی که در اطراف یک مرکز رخ می دهد مشخص می شود و نشان دهنده الگوهای رفتاری نقاط یا خطوط است. در این مطالعه، رویدادها مکانهای (ژئوکد شده) حوادث (که توسط نقاط نشان داده میشوند) هستند و KDE برای محاسبه تابع چگالی احتمال هر مکان حادثه استفاده میشود.
تجزیه و تحلیل چگالی هسته با عبور یک پنجره متحرک از روی داده ها، معمولاً روی یک شبکه معمولی انجام می شود. چگالی مشاهدات در یک شعاع تعیین شده برای هر رویداد واقع در شبکه محاسبه می شود و سهم هر مشاهده با نزدیکی آن به مرکز پنجره متحرک وزن می شود. بنابراین، نتیجه اعمال KDE یک نقشه چگالی (فرمت رستر) است. مقادیر هر پیکسل نشان دهنده روابط بین غلظت رویدادها در واحد سطح است. علاوه بر این، KDE می تواند برای محاسبه تراکم رویدادهای وقت شناس ( به عنوان مثال ، تراکم تصادفات رانندگی در یک منطقه) یا رویدادهای خطی (به عنوان مثال ، استفاده شود..، تراکم یک شبکه جاده ای در یک منطقه). مهم است که سادگی، خواص رضایت بخش و نتایج خوب روش KDE را برجسته کنیم [ 43 ، 44 ].
مناطقی که رویدادها در آن متمرکز شدهاند با تجزیه و تحلیل KDE شناسایی میشوند و بالاترین میزان تصادفات مربوط به VRU را دارند. به این مناطق لکه های سیاه (مناطقی که غلظت تصادفات را نشان می دهند) می گویند. وجود مناطق لکه سیاه ناشی از آگاهی از فعل و انفعالات فضایی بین مکان های تصادفات ترافیکی به هم پیوسته است. ساده ترین کاربرد GIS برای تجزیه و تحلیل حوادث، بررسی ویژگی های مکانی و ویژگی های مکان های تصادفات ترافیکی است. در واقع، استفاده از GIS مزایای متعددی از استفاده از روشهای غیرمکانی برای تحلیل حوادث دارد [ 45 ].
برای تعیین مهم ترین متغیرها در سیستم های شهری (عوامل جمعیت شناختی و مرتبط با حمل و نقل) که در وقوع تصادفات جاده ای دخیل هستند، چندین محقق از تحلیل رگرسیون چند متغیره استفاده کرده اند، از جمله [ 46 ، 47 ، 48 ، 49 ، 50 ، 51 ، 52 , 53 , 54 , 55 , 56 ].
در این مطالعه، با استفاده از دو مدل، مدل حداقل مربعات معمولی (OLS) و مدل تأخیر خودبازگشت فضایی (SAR) مقدار تصادفات رانندگی VRU در برابر تعداد متغیرهای توضیحی رگرسیون شد.
مدل رگرسیون چندگانه OLS سنتی نسبتاً سریع، ساده و مناسب برای تجزیه و تحلیل رویدادهای وقت شناس، مانند تصادفات جاده ای است. به عنوان یک روش رگرسیون جهانی، یک فرض مهم مدل OLS این است که همه متغیرها در سراسر منطقه مورد مطالعه ثابت هستند. علاوه بر این، روش OLS میتواند شامل مسائل بالقوه مرتبط با همبستگیهای مکانی و زمانی باشد و درونزایی بین متغیر وابسته (میزان تصادفات جادهای) و متغیرهای مستقل (مانند جمعیت، مساحت، درآمد، سفرهای ایجاد شده و غیره ) است. ممکن است [ 57 ، 58 ، 59]. به نوبه خود، SAR یک رویکرد مدلسازی قوی است که میتواند زمانی که یک خودهمبستگی فضایی بسیار محتمل است، اتخاذ شود. در روش SAR، برهمکنشها به عنوان میانگین وزنی مشاهدات همسایه مدلسازی میشوند. متغیرهای درونزا که تعاملات را تشکیل میدهند، متغیرهای وابسته با تاخیر مکانی نامیده میشوند و وزنها که در یک ماتریس همسایگی (بر اساس مجاورت یا k نزدیکترین همسایهها) گروهبندی میشوند، هسته متمایز کلاس مدلهای فرآیند فضایی را تشکیل میدهند. این دو روش (OLS و SAR) مقایسههایی را در بین مشخصات مختلف، تستهایی برای استحکام ارائه میدهند و به فرد اجازه میدهند تا اهمیت تعاملات فضایی و وابستگیهای متقابل را در میان ویژگیهای درگیر درک کند [ 60 ، 61 ].
3. مناطق مطالعه
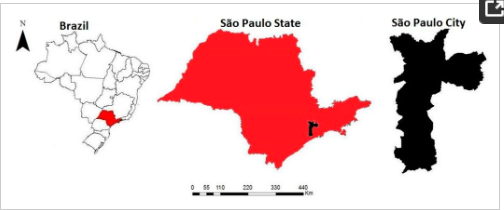
یکی از مناطق مورد مطالعه، شهر سائوپائولو است ( شکل 1 )، که مرکز ایالت سائوپائولو است و در جنوب شرقی برزیل واقع شده است. سائوپائولو نمونه ای عالی از یک شهر به سرعت در حال رشد است، با بیش از 11.3 میلیون نفر (2013) در مساحت 1521.101 کیلومتر مربع ، تراکم جمعیتی 7398.26 نفر در کیلومتر مربع ، نرخ شهرنشینی 99.10٪ و (2010) نرخ رشد هندسی 0.59٪ (طی دوره 2010-2013). طبق گزارش سازمان ملل متحد (UNO)، سائوپائولو یکی از 27 کلان شهر در جهان است (منبع: IBGE—Instituto Brasileiro de Geografia e Estatística).

شکل 1. منطقه مطالعه: سائوپائولو. منبع: [ 2 ].
دومین منطقه مورد مطالعه، رم ( شکل 2 )، یک شهر و کمون خاص (به نام “Roma Capitale”) در ایتالیا است. رم پایتخت ایتالیا، استان رم و منطقه لاتزیو است. رم بزرگترین و پرجمعیت ترین کمون ایتالیا و چهارمین شهر پرجمعیت اتحادیه اروپا است. جمعیت آن (2013) 2،913،349 نفر، با مساحت 1285.31 کیلومتر مربع و تراکم جمعیتی 2266.7 نفر در کیلومتر مربع است (منبع: Roma Capitale, Annuario Statistico 2013, Unità Operative Statisticae, UO)Staostemat.
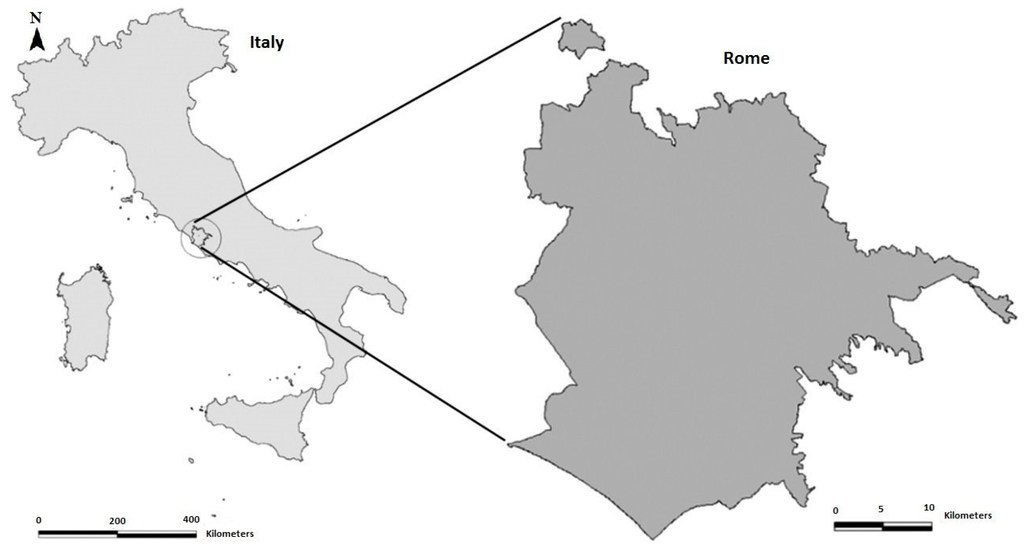
شکل 2. منطقه مطالعه: رم. منبع: اقتباس از [ 62 ].
4. شرح داده ها و روش ها
این مطالعه از مجموعه ای از داده های مکانی و غیر مکانی از سائوپائولو و رم استفاده کرد که در زیر توضیح داده شده است.
4.1. سائو پائولو
شهرداری سائوپائولو واحد فضایی اتخاذ شده در تجزیه و تحلیل (مناطق؛ شکل 3 الف) و داده های برداری (ژئوکدگذاری شده) را که مکان بیمارستان ها، دانشگاه ها و کالج ها، پارک ها و مناطق تفریحی و مراکز خرید خرده فروشی را ارائه می کرد، ارائه کرد. CET-SP (Companhia de Engenharia de Tráfego de São Paulo: بدنه عملیاتی شهرداری سائوپائولو برای مدیریت ترافیک شهر) مکان های تصادفات رانندگی مربوط به VRUها را در سال 2012 و در شبکه جاده سائوپائولو ارائه کرد. در نهایت، Metrô-SP (Companhia do Metropolitano do Estado de São Paulo: شرکت عمومی مسئول راه اندازی سیستم قطار مترو) بررسی مبدا و مقصد (2007 و 2012) را انجام داد که اطلاعات اجتماعی-اقتصادی و الگوهای سفر را ارائه کرد.
4.2. رم
مرکز تحقیقات حمل و نقل و لجستیک (CLT) در دانشگاه رم دادههای مربوط به تصادفات رانندگی مربوط به VRUها را در سال 2012 با شبکه جادهای رم، اطلاعات اجتماعی-اقتصادی و دادههای برداری (ژئوکد شده) ارائه کرد که مکان بیمارستانها، دانشگاهها و کالجها، پارکها را ارائه میکند. و مناطق تفریحی و مراکز خرید خرده فروشی. واحدهای فضایی اتخاذ شده در این مطالعه عبارتند از municipi ، quuartieri ، rioni ، حومه و زون Agro Romano ( شکل 3 ب).

شکل 3. واحدهای فضایی: ( الف ) سائوپائولو; و ( ب ) رم.
4.3. روش شناسی
اولین گام استانداردسازی داده های مکانی از نظر سیستم مختصات، واحدهای مکانی و تنظیم مکانی بود. سپس، تجزیه و تحلیل حوادث ترافیکی VRU (مقدار کل تصادفات و میزان تصادفات مرگبار، سائوپائولو و رم؛ به شکل 4 a,b مراجعه کنید) در محیط GIS با استفاده از تحلیل چگالی (KDE) انجام شد.
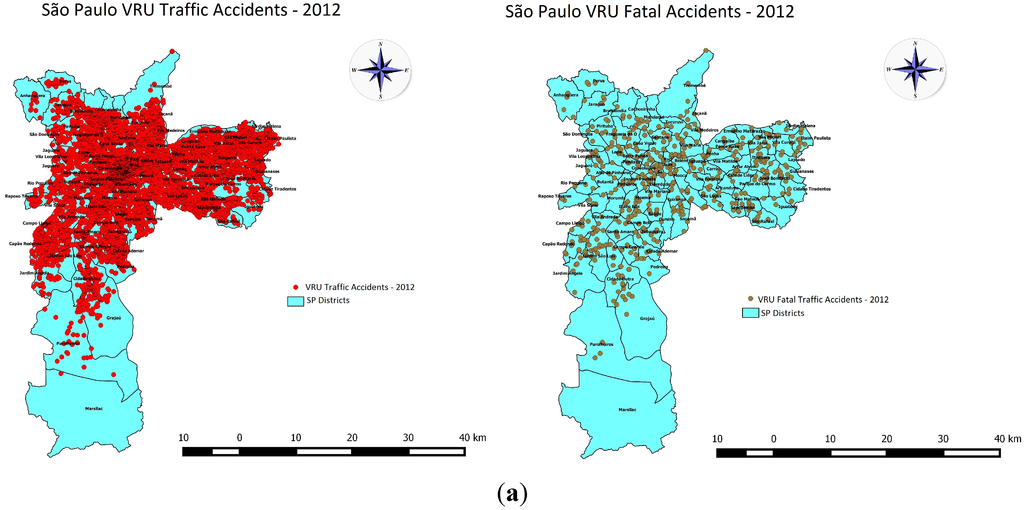
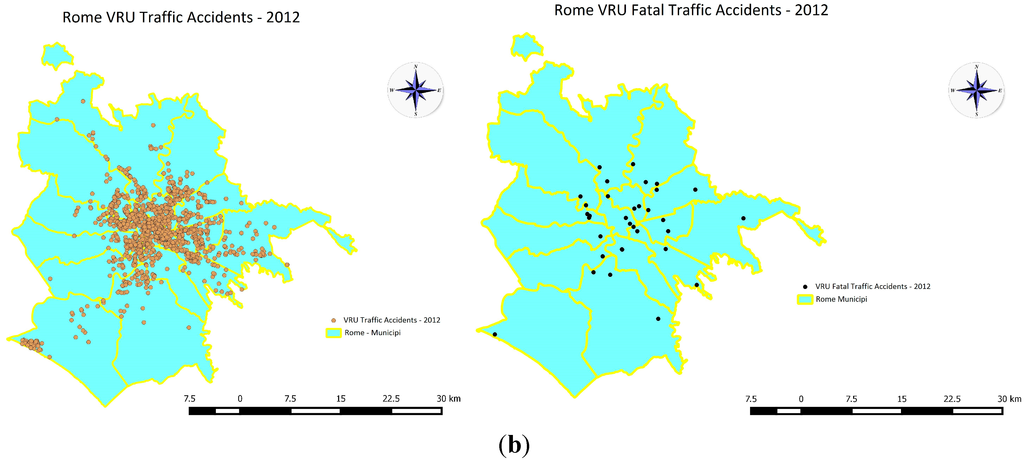
شکل 4. ( الف ) تصادفات ترافیکی کاربران آسیب پذیر جاده (VRU) در سائوپائولو. ( ب ) حوادث ترافیکی VRU در رم.
اهداف تجزیه و تحلیل KDE شناسایی: (1) مکان های فضایی نقاط سیاه بود. (2) ویژگی های هر تصادف در داخل مناطق لکه سیاه (آدرس، نوع جاده، نوع تصادف، وسیله نقلیه(های) درگیر و تاریخ/زمان). (3) ویژگی های منطقه که توسط نقاط سیاه مشخص شده است (مساحت، جمعیت، تراکم جمعیتی و تراکم شبکه جاده). و (4) تعداد و مکان های مکانی نهادهای در نظر گرفته شده در این مطالعه به عنوان هاب های تولید کننده سفر (TGH) (بیمارستان ها، دانشگاه ها و کالج ها و مراکز خرید خرده فروشی) در داخل مناطق نقطه سیاه.
یک مطالعه اکولوژیکی با استفاده از دادههای جمعآوریشده توسط واحدهای فضایی (در سائوپائولو، نواحی؛ در رم، کوارتیری ، ریونی، حومه و منطقه Agro-Romano؛ به شکل 3 ) برای بررسی خوشههای فضایی (مناطق لکههای سیاه) و ارتباطهای احتمالی بین انجام شد. وقوع تصادفات جاده ای شهری و عوامل اجتماعی-اقتصادی و مرتبط با حمل و نقل.
در تجزیه و تحلیل آماری (مدل های رگرسیون فضایی)، متغیرهای زیر (در هر واحد فضایی) در نظر گرفته شد: تعداد تصادفات کل و مرگبار VRU. حوزه؛ جمعیت؛ تراکم جمعیتی؛ تعداد تصادفات کل/کشنده تقسیم بر مساحت (حوادث رانندگی VRU/km2 ) ؛ تعداد تصادفات کل/کشنده تقسیم بر جمعیت (حوادث تصادفات رانندگی VRU/ساکنان)؛ تعداد سفرهای ایجاد شده؛ تعداد سفرهای ایجاد شده تقسیم بر مساحت (سفر در کیلومتر 2) تعداد سفرهای ایجاد شده تقسیم بر جمعیت (سفر/ساکن)؛ درآمد متوسط؛ درآمد سرانه؛ تعداد مراکز خرید خرده فروشی، بیمارستان ها و دانشگاه ها و کالج ها؛ و متغیری به نام TGH (Trip Generator Hubs) که به صورت مجموع تعداد مراکز خرید خرده فروشی، بیمارستان ها و دانشگاه ها و کالج ها محاسبه می شود. گام اول محاسبه ماتریس همبستگی (همبستگی های اسپیرمن) برای شناسایی متغیرهای خطی و حذف آنها از مدل رگرسیون (همبستگی بیشتر از 60 درصد) بود.
تجزیه و تحلیل رگرسیون (روش OLS) میزان تصادفات کل/کشنده تقسیم بر مساحت (متغیرهای وابسته) با متغیرهای مستقل انتخاب شده انجام شد. متغیرهای گنجانده شده در مدل با ارزیابی سطح معناداری ( p -value ) انتخاب شدند. متغیرهای توضیحی احتمالی به عنوان متغیرهایی تعریف شدند که مقادیر p ≤0.20 را ارائه می کردند [ 63 ]. یک تحلیل فضایی جهانی نیز برای تأیید وابستگی و تغییرپذیری فضایی حول مقدار پیشبینیشده (به عنوان مثال ، توزیع فضایی و ناهمگنی در باقیماندههای مدل) انجام شد [ 64 ]]. اهمیت توزیع های نرمال هنگام اعمال مدل های رگرسیون غیرقابل انکار است، زیرا تفسیر و استنباط ممکن است قابل اعتماد یا معتبر نباشند زمانی که فرض نرمال بودن نقض شود [ 65 ]. سپس، آزمون Kolmogorov-Smirnov برای نرمال بودن، همانطور که توسط [ 66 ] توضیح داده شد، انجام شد.
شاخص موران جهانی متداولترین آزمون مورد استفاده برای خودهمبستگی فضایی جهانی است [ 67 ]، برای باقیماندههای رگرسیون تعیین شد (برای جزئیات بیشتر، [ 68 ] را ببینید) برای بررسی تأثیرات نوع ماتریس همسایگی و به عنوان یک نوع ملکه از منظم استفاده شد. ماتریس مجاورت (برای جزئیات بیشتر، [ 69 ] را ببینید. زمانی که شاخص جهانی موران یک خودهمبستگی فضایی مثبت قابل توجهی را نشان نمی دهد، مدل OLS مناسب در نظر گرفته می شود. در غیر این صورت، آزمون ضریب لاگرانژ دو مرحله ای (LMT) برای آشکارسازی فضایی اعمال می شود. وابستگی و ناهمگونی فضایی در این مطالعه، زمانی که شاخص موران نشان میدهد که باقیماندهها وابستگی فضایی دارند، مدل SAR (برای جزئیات بیشتر، [ 70 ] را ببینید.]) مورد استفاده قرار گرفت.
5. نتایج
5.1. تخمینگر چگالی هسته
اولین تجزیه و تحلیل KDE بود که در یک محیط GIS برای شناسایی نقاط سیاه تصادفات ترافیکی (تعداد کل تصادفات و تصادفات منجر به مرگ) شامل عابران پیاده و دوچرخه سواران استفاده شد. با توجه به تعداد بالای تصادفات جاده ای در سائوپائولو (همانطور که در شکل 4 الف نشان داده شده است)، KDE چهار کلاس تراکم نماینده برای کل تصادفات، مناطق تصادف با تراکم کم، متوسط، زیاد و بسیار زیاد ایجاد کرد ( شکل 5 ) . . علاوه بر این، سه کلاس تراکم برای تصادفات مرگبار تولید شد ( شکل 6 ). در رم، میزان تصادفات جاده ای بسیار کمتر از سائوپائولو بود ( شکل 4 ب). بنابراین، KDE سه کلاس تراکم برای تصادفات کل و مرگبار، مناطق تصادف با تراکم کم، متوسط و بالا ایجاد کرد.شکل 7 و شکل 8 ).
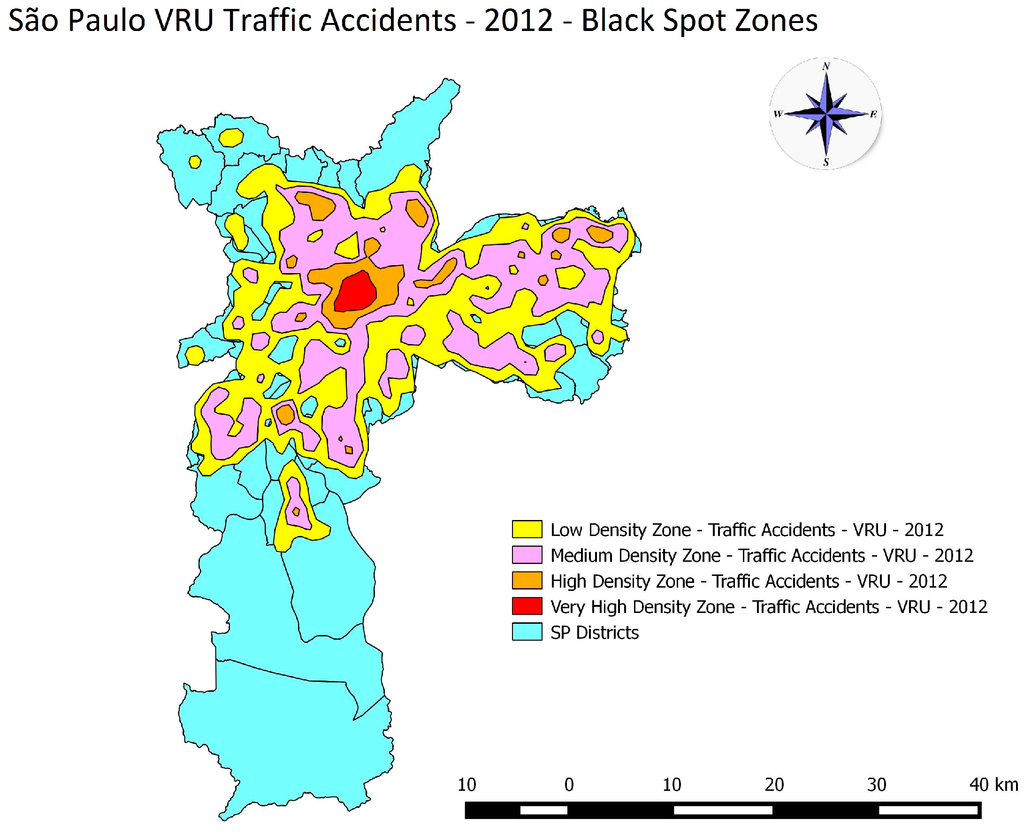
شکل 5. مناطق لکه سیاه. تصادفات رانندگی شامل VRU در سائوپائولو در سال 2012.
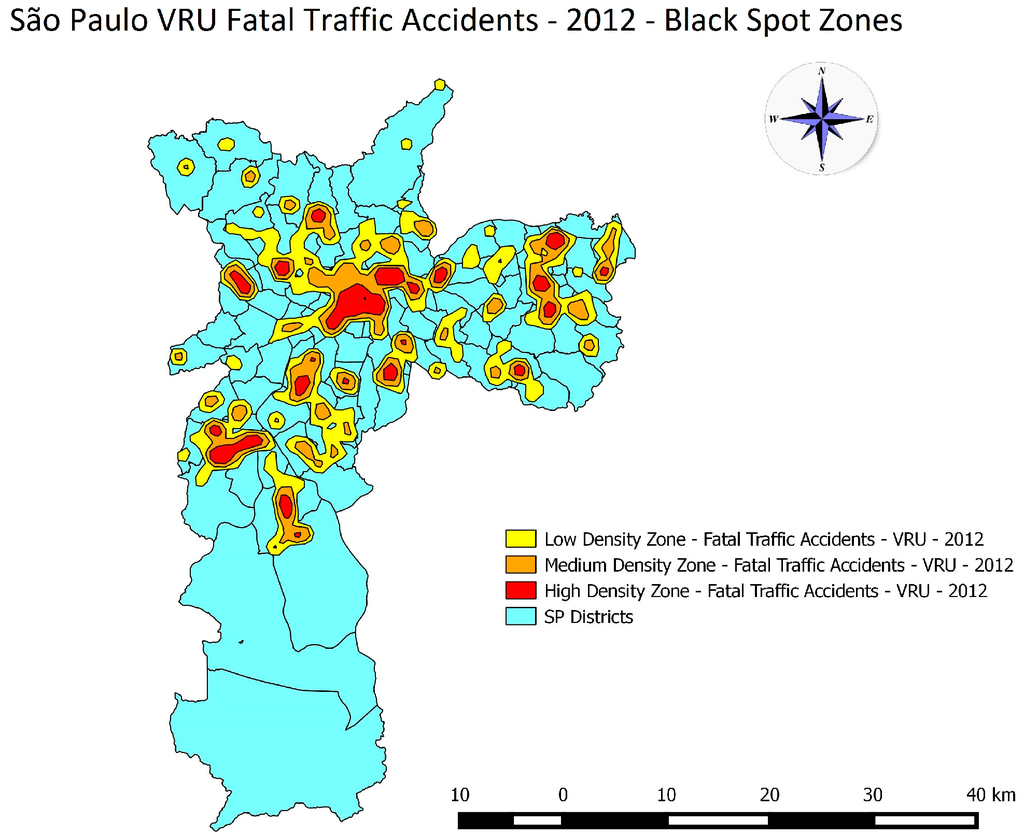
شکل 6. مناطق لکه سیاه. تصادفات رانندگی مرگبار شامل VRU در سائوپائولو در سال 2012.
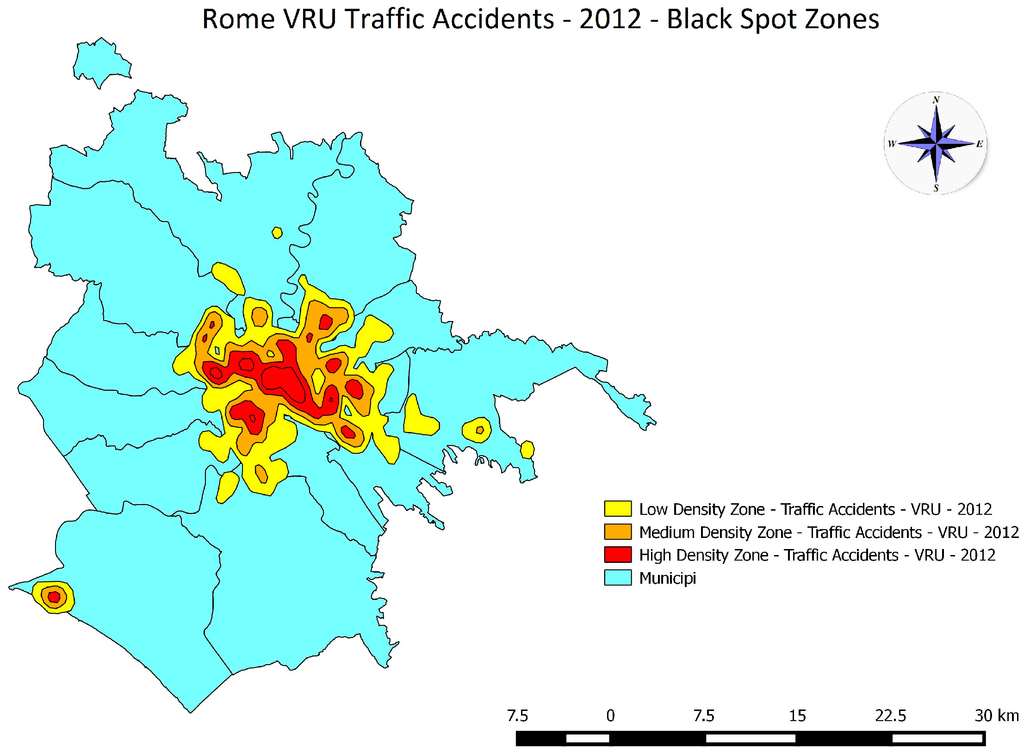
شکل 7. مناطق لکه سیاه. تصادفات رانندگی شامل VRU در رم در سال 2012.

شکل 8. مناطق لکه سیاه. تصادفات رانندگی مرگبار شامل VRU در رم در سال 2012.
5.2. تحلیل آماری
مناطق لکه سیاه با حضور TGH (1) بیمارستان؛ (2) دانشگاه و کالج؛ و (3) مراکز خرید خرده فروشی مرتبط بودند. شکل 9 ، شکل 10 و شکل 11 وجود TGH را در داخل مناطق چگالی در سائوپائولو نشان می دهد، و شکل 12 ، شکل 13 و شکل 14 مناطق رم را نشان می دهد.
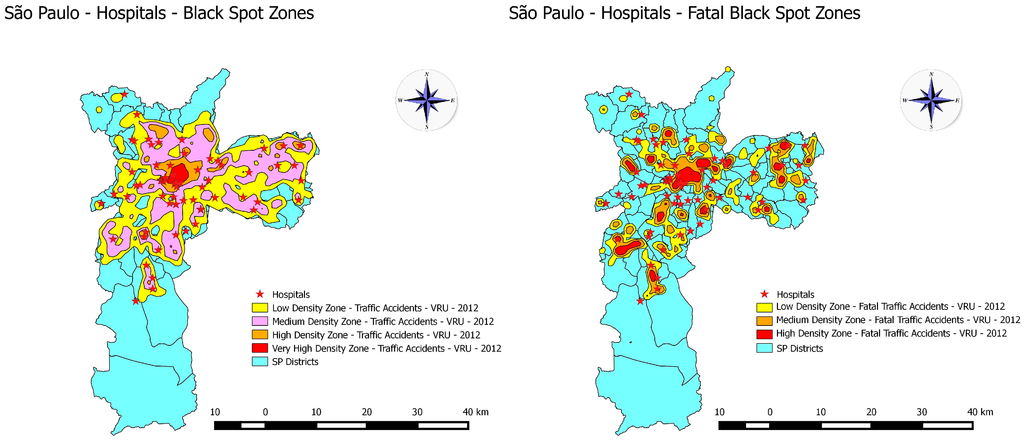
شکل 9. بیمارستان ها/نقطه سیاه: سائوپائولو.

شکل 10. دانشگاه ها / نقاط سیاه: سائوپائولو.
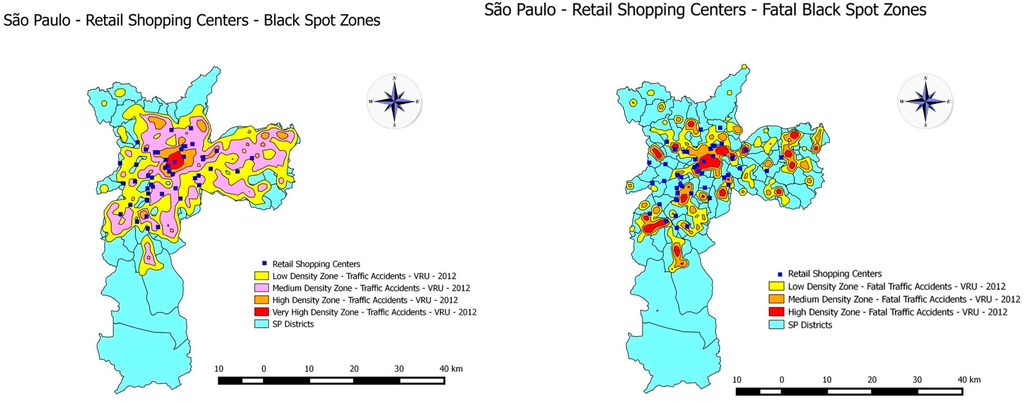
شکل 11. مراکز خرید خرده فروشی/نقاط سیاه: سائوپائولو.
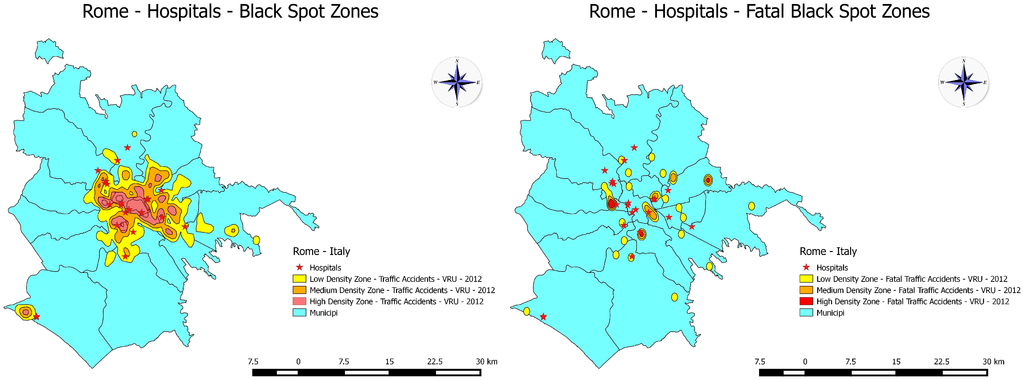
شکل 12. بیمارستان ها/نقطه سیاه: رم.
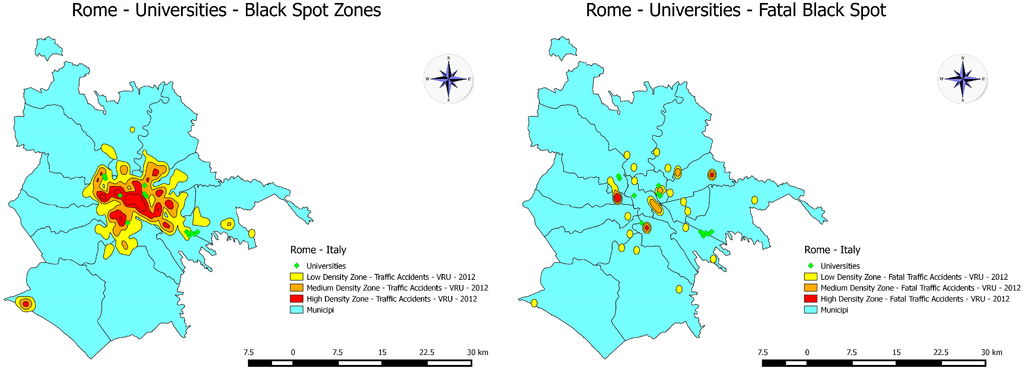
شکل 13. دانشگاه ها و کالج ها / نقاط سیاه: رم.

شکل 14. مراکز خرید خرده فروشی/نقاط سیاه: رم.
تجزیه و تحلیل بصری به تنهایی برای تأیید وجود تأثیرات مستقیم TGH بر روی مناطق لکه سیاه کافی نیست. بنابراین، ما بررسی کردیم که آیا غلظت این نهادها (TGH) با استفاده از نرخ بالای تصادفات رانندگی در هر دو شهر مرتبط است یا خیر و متغیرهایی را که میتوانند با وقوع این رویدادها مرتبط باشند، تعیین کردیم.
5.2.1. سائوپائولو: کل تصادفات VRU
در سائوپائولو، متغیرهای توضیحی که غلظت کل تصادفات ترافیکی VRU را به بهترین شکل توضیح میدهند (در مدل با نرخ تعداد کل تصادفات ترافیکی تقسیم بر مساحت نشان داده شده است) شامل تعداد سفرهای تولید شده تقسیم بر جمعیت (سفرها/ساکن) و THG است. (مراکز خرید خرده فروشی + بیمارستان ها + دانشگاه ها / کالج ها). برای ارزیابی نرمال بودن از آزمون کولموگروف-اسمیرنوف و از ریشه چهارم کل تصادفات ترافیکی VRU برای بهبود تقریب توزیع نرمال استفاده شد. نتایج در جدول 1 در زیر ارائه شده است و نشان می دهد که مدل OLS مناسب است.

جدول 1. مدل رگرسیون OLS: سائوپائولو، کل تصادفات ترافیکی VRU.
5.2.2. سائوپائولو: تصادفات رانندگی VRU کشنده
در سائوپائولو، متغیر توضیحی که به بهترین وجه غلظت تصادفات کشنده ترافیک VRU را توضیح میدهد (که در مدل با نرخ تعداد تصادفات رانندگی کشنده تقسیم بر مساحت نشان داده میشود) به عنوان تقسیم سفرهای تولید شده بر جمعیت (سفرها/ساکن) محاسبه شد. برای ارزیابی نرمال بودن از آزمون کولموگروف-اسمیرنوف و از ریشه دوم تصادفات کشنده VRU برای بهبود تقریب توزیع نرمال استفاده شد. نتایج در جدول 2 در زیر ارائه شده است و نشان می دهد که مدل OLS مناسب است.
جدول 2. مدل رگرسیون OLS: سائوپائولو، حوادث ترافیکی VRU کشنده.
5.2.3. رم: کل تصادفات VRU
در رم، متغیر توضیحی که به بهترین شکل غلظت کل تصادفات ترافیکی VRU را توضیح میدهد، تراکم جمعیتی (ساکنان/کیلومتر مربع ) است. برای ارزیابی نرمال بودن از آزمون کولموگروف-اسمیرنوف و از جذر مجموع تصادفات ترافیکی VRU برای بهبود تقریب توزیع نرمال استفاده شد. نتایج زیر در جدول 3 ارائه شده است و نشان می دهد که مدل OLS مناسب نیست. سپس مرحله بعدی استفاده از مدل SAR بود.
از آنجایی که شاخص موران یک مقدار قابل توجه است، باقیماندهها وابستگی فضایی را نشان میدهند و OLS برای مدلسازی کل تصادفات ترافیکی VRU در رم مناسب نیست. بنابراین، آزمون ضرب لاگرانژ (LMT) برای انتخاب بهترین مدل انجام شد. نتایج در جدول 4 نشان داده شده است. هنگام تجزیه و تحلیل نتایج LMT، مدل ضریب قوی لاگرانژ با تاخیر مکانی (RLMlag) اتخاذ شد.
نتایج مدل تاخیر خودهمبستگی فضایی (RLMlag) در جدول 5 ارائه شده است و نشان می دهد که مدل SAR مناسب است، زیرا هیچ وابستگی فضایی باقیمانده رخ نمی دهد. معیار اطلاعات آکایک (AIC) (جزئیات در [ 71 ، 72 ، 73 ]) مدل SAR کمتر از AIC رگرسیون خطی (OLS) است، که نشان می دهد مدل SAR بهتر از مدل OLS برای VRU کل است. حوادث رانندگی در رم
جدول 3. مدل رگرسیون OLS: رم، کل تصادفات رانندگی VRU.
جدول 4. آزمون ضرب کننده لاگرانژ (LMT): رم، کل تصادفات رانندگی VRU.
جدول 5. مدل تأخیر خودهمبستگی فضایی (SAR): رم، کل تصادفات ترافیکی VRU.
5.2.4. رم: تصادفات رانندگی VRU کشنده
به دلیل وقوع کم تصادفات رانندگی کشنده شامل VRU در رم (فقط 34 رویداد)، امکان انجام تحلیل آماری با استفاده از مدلهای رگرسیون فضایی استاندارد وجود نداشت. در این مورد، لازم است یک مدل تورم صفر (وضعیت صفرهای اضافی نسبت به آنچه که مدلهای استاندارد اجازه میدهند) اتخاذ کنیم، زیرا تعداد زیادی از مشاهدات برابر با صفر هستند، همانطور که در [ 74 ] توضیح داده شد. با توجه به [ 75]، دادههای شمارش تورم صفر به دادههایی اشاره میکنند که یک مدل خطی تعمیمیافته برای آنها به دلیل صفرهای زیاد، تناسب ندارد. چنین دادههایی در بسیاری از کاربردها رایج هستند (در این مطالعه، تحقیقات مربوط به تصادفات جادهای شهری)، بهویژه زمانی که بسیاری از افراد مشاهدات صفر دارند. با این حال، بسیاری از برنامه ها مشاهدات بسیار بزرگتری دارند، به طوری که میانگین کلی نزدیک به صفر نیست. بنابراین، تصادفات کشنده ترافیک VRU در رم از نظر آماری تجزیه و تحلیل نشد.
6. نتیجه گیری
استفاده از تجزیه و تحلیل فضایی (روش KDE در یک محیط GIS) نتایج رضایت بخشی را برای شناسایی و تعیین محدوده مناطق با غلظت بالای حوادث ترافیکی VRU ارائه کرد. با استفاده از مناطق لکههای سیاه، میتوان زیر پهنههایی را با درجات مختلف چگالی (بسیار زیاد / زیاد / متوسط / کم) طبقهبندی کرد.
هنگام تجزیه و تحلیل نتایج بهدستآمده از سائوپائولو، مناطقی با بالاترین نرخ تصادفات رانندگی VRU با مناطقی با بالاترین غلظت TGH از جمله بیمارستانها، دانشگاهها و کالجها و مراکز خرید خردهفروشی مطابقت داشتند. شکل 9 نشان می دهد که منطقه اطراف بیمارستان ها بالاترین خطر حوادث ترافیکی VRU را نشان می دهد. به طور مشابه، شکل 10 نشان می دهد که مناطق لکه سیاه “با چگالی بسیار بالا”، “چگالی بالا” و “تراکم متوسط” عمدتاً در محل تمرکز دانشگاه ها و کالج ها بوده اند. همین نتیجه را می توان در مورد مراکز خرید خرده فروشی نیز مشاهده کرد ( شکل 11 ).
تجزیه و تحلیل آماری سائوپائولو ارتباط بین متغیر وابسته (تعداد تصادفات ترافیکی کل/کشنده VRU تقسیم بر مساحت) و متغیرهای مستقل (نسبت سفر به ساکنان و وجود TGH) را نشان داد. به نوبه خود، مدل رگرسیون نشان داد که وجود TGH تأثیر قاطعی بر وقوع حوادث رانندگی VRU کشنده ندارد، همانطور که برای کل تصادفات مشاهده شد (مجموع تصادفات غیرکشنده و کشنده). از نظر تصادفات مرگبار VRU، متغیر توضیحی که بالاترین ارتباط را ارائه میدهد، تعداد سفرهای ایجاد شده (سفر/ساکن) بود. در هر دو مورد (حوادث کل و مرگبار)، مدل OLS برای توصیف پویایی حوادث ترافیکی VRU و ویژگیهای شهر (منطقه، جمعیت، درآمد، سفرهای تولید شده، TGH،و غیره ).
با توجه به تجزیه و تحلیل بصری در رم، نمی توان تأیید کرد که مناطق لکه سیاه با مقاصد ترجیحی جمعیت (TGH) مرتبط هستند. تجزیه و تحلیل آماری نشان داد که متغیر “تراکم جمعیتی” برای توضیح پویایی کل تصادفات جاده ای VRU کافی است.
از آنجایی که رم یکی از پربازدیدترین شهرهای جهان است و دارای تعداد زیادی جاذبه های تاریخی و گردشگری است که در منطقه مرکزی آن واقع شده اند، یکی از دلایل احتمالی نرخ بالای تصادفات رانندگی VRU در این مناطق می تواند تمرکز بالا باشد. بازدیدکنندگان به جای وجود قطب های تولید کننده سفر سنتی. با این حال، هیچ الگوی در مورد TGH مشاهده نشد. بنابراین، نمی توان ارتباط مستقیمی بین وجود هاب های مولد سفر و نرخ تصادفات ترافیکی VRU در رم ایجاد کرد.
7. ملاحظات نهایی
طبق [ 76 ، 77 ]، شیوه های حمل و نقل موتوری بیشترین تصادفات جاده ای را در بسیاری از مناطق شهری به خود اختصاص می دهند. بنابراین، توسعه روش های حمل و نقل جایگزین، مانند حمل و نقل عمومی، دوچرخه و پیاده روی، اغلب توصیه شده است. با این حال، سیاستهایی که برای چنین پیادهسازیهایی انجام میشوند به سختی در رم و سائوپائولو یا برای توسعه دستورالعملهای ایمنی مناسب برای VRU مطرح شدهاند.
آسیب های ترافیکی جاده ای در رم علت اصلی مرگ و میر در میان جوانان (14 تا 30 سال) است. مدیریت سرعت ترافیک برای ایجاد یک سیستم جاده ای ایمن و برای دستیابی به هدف تحمیلی اتحادیه اروپا (EU) برای کاهش 50 درصدی تلفات جاده ای در سال های 2011-2020 بسیار مهم است [ 78 ، 79 ].
به طور مشابه، تصادفات رانندگی علت اصلی آسیب و مرگ و میر در میان کودکان (بالای یک سال) و نوجوانان (تا 19 سال) در سائوپائولو [ 80 ] است. با توجه به [ 81 ، 82 ]، تعداد تصادفات رانندگی با رشد سریع و کنترل نشده شهری در سائوپائولو مرتبط است. نسبت تصادفات مرگبار مربوط به VRU تا حدی ناشی از عوامل فرهنگی و جمعیت شناختی است. بسیاری از حوادث رانندگی مرگبار یا تصادفات با صدمات شدید ناشی از شرایط نامناسب ایمنی ترافیک است که اغلب توسط محیط های فیزیکی، سیاسی، فنی و اجرایی تاکید می شود.
سیستمهای اعمال سرعت باید برای کاهش تصادفات جادهای شهری اتخاذ شوند و ویژگیهای هندسی شبکه جادهها باید دوباره ارزیابی و اصلاح شوند [ 83 ]. یکی از روشهای دستیابی به این اهداف، معرفی شیوههای مقرونبهصرفه، مانند استراتژیهای آرامسازی ترافیک است که با کاهش سرعت ترافیک موتوری، طراحی مجدد زیرساختهای حملونقل و معرفی امکانات دوچرخهسواری و پیادهروی، به تحرک VRU سود میرساند [ 84 ].
آرامسازی ترافیک به ترکیبی از تغییرات فیزیکی در طراحی جاده و مدیریت سرعت اشاره دارد که با هدف بهبود شرایط ایمنی جادهها، بهویژه برای کاربران حالتهای غیر موتوری (VRU) انجام میشود [ 85 ]. اقدامات آرامسازی ترافیک با کاهش سرعت وسیله نقلیه و/یا حجم ترافیک در سیستمهای جادهای شهری، کاهش و/یا حذف حرکات متضاد، بهبود دید، کاهش قرار گرفتن در معرض و افزایش هوشیاری رانندگان بر ایمنی جادهها تأثیر میگذارد [ 86 ]. اقدامات آرامسازی ترافیک شامل شیکینها، جزایر مرکزی، دستگاههای کنترل ترافیک (مثلاً علائم پیام متغیر یا دوربینهای سرعت)، درمانهای سطحی (مانند قوزهای سرعت یا نوارهای رومبل عرضی) و ویژگیهای کنار جاده (مانند دروازهها یا محوطهسازی) است.
هزینه های اجتماعی-اقتصادی بالای حوادث ترافیکی به وضوح نشان دهنده نیاز دولت ها و سیاست گذاران به تقویت اقدامات پیشگیرانه از حوادث ترافیکی است [ 87 ]. طبق [ 78 ، 88یکی از مهم ترین روش های مداخله، اقدام آموزشی است که باید برای کل جمعیت و به ویژه نوجوانان و جوانانی که در معرض خطر بیشتری برای درگیری در حوادث رانندگی هستند، باشد. رفتارهای کاربران (رانندگان و سرنشینان وسایل نقلیه موتوری و غیر موتوری و عابران پیاده) می تواند در تعداد و شدت تصادفات رانندگی به ویژه سرعت غیرمجاز، مهارت و آموزش ضعیف رانندگی، عدم آشنایی با شیوه های حمل و نقل غیرموتوری، عدم رعایت قوانین و مقررات تداخل ایجاد کند. استفاده از تجهیزات ایمنی (کمربند ایمنی، کلاه ایمنی موتورسیکلت و … ) و مصرف الکل.
منابع
- Haque, MM; چانه، HC; Debnath، AK پایدار، ایمن، هوشمند – سه عنصر کلیدی سیاست های حمل و نقل در حال تحول سنگاپور. ترانسپ سیاست 2013 ، 27 ، 20-31. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ماچادو، CAS؛ Giannotti، MA; شینوهارا، ای جی. نیشیساکی، اچ. Quintanilha، JA شناسایی مکانهای تصادفات رانندگی که شامل کاربران آسیبپذیر جاده (VRU) در شهر سائوپائولو میشود. در مجموعه مقالات عرصه تحقیقات حمل و نقل (TRA 2014) – پنجمین کنفرانس راه حل های حمل و نقل: از تحقیق تا استقرار- تحرک نوآورانه، بسیج نوآوری، پاریس، فرانسه، 14-17 آوریل 2014. پ. 10.
- سانتوس، جی. بهرنت، اچ. مکونی، ال. شیروانی، ت. Teytelboym, A. Part I: خارجی ها و سیاست های اقتصادی در حمل و نقل جاده ای. Res. ترانسپ اقتصاد 2010 ، 28 ، 2-45. [ Google Scholar ] [ CrossRef ]
- کوچک، ک. Verhoef, ET اقتصاد حمل و نقل شهری ; Routledge: لندن، انگلستان، 2007; پ. 276. [ Google Scholar ]
- سوزوکی، اچ. سرورو، آر. Iuchi، K. تغییر شهرها با ترانزیت – یکپارچه سازی ترانزیت و کاربری زمین برای توسعه شهری پایدار . سری توسعه شهری; بانک جهانی: واشنگتن دی سی، ایالات متحده آمریکا، 2013; پ. 205. [ Google Scholar ]
- کلاسن، جی. البسیونی، ک. اسلام، MT تجزیه و تحلیل شدت برخورد وسیله نقلیه دوچرخه-موتور با استفاده از مدل های لجیت مختلط فضایی: مطالعه موردی شهر ادمونتون. Saf. علمی 2014 ، 62 ، 295-304. [ Google Scholar ] [ CrossRef ]
- نابورس، دی. گوگنور، ای. توماس، ال. دسانتیس، د. ساویر، ام. دستورالعمل های ممیزی ایمنی جاده دوچرخه و لیست های سریع. در اداره بزرگراه فدرال-FHWA، گزارش نهایی ؛ FHWA: واشنگتن، دی سی، ایالات متحده آمریکا، 2012; پ. 88. [ Google Scholar ]
- اوت، دی. یانش، ام. Haasper، C. پارامترهای حفاظت از آسیب و علت تصادف برای کاربران آسیب پذیر جاده بر اساس مطالعه عمیق تصادفات آلمانی GIDAS. اسید. مقعدی قبلی 2012 ، 44 ، 149-153. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Schepers، P. هاگنزیکر، ام. متهورست، آر. ون وی، بی. Wegman, F. چارچوب مفهومی برای ایمنی جاده و تحرک به کار رفته در ایمنی دوچرخه سواری. اسید. مقعدی قبلی 2014 ، 62 ، 331-340. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- جیانگ، بی. Okabe، A. روش های مختلف تفکر در مورد شبکه های خیابانی و تحلیل فضایی. Geogr. مقعدی 2014 ، 46 ، 341-344. [ Google Scholar ] [ CrossRef ]
- تئوفیلاتوس، ا. یانیس، جی. مروری بر تأثیر ترافیک و ویژگی های آب و هوا بر ایمنی جاده ها. اسید. مقعدی قبلی 2014 ، 72 ، 244-256. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چلا، ال. شیود، اس. Lipovac، K. یکپارچه سازی GIS و تکنیک های تحلیلی فضایی در تجزیه و تحلیل تصادفات ترافیکی جاده ای در صربستان. بین المللی J. Traffic Transp. مهندس 2013 ، 3 ، 1-15. [ Google Scholar ] [ CrossRef ]
- بیل، ام. آندراشیک، آر. Janoška, Z. شناسایی مکانهای جادهای خطرناک تصادفات رانندگی با استفاده از تخمین تراکم هسته و ارزیابی اهمیت خوشهای. اسید. مقعدی قبلی 2013 ، 55 ، 265-273. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- وانگ، سی. قدوس، م. Ison، SG اثر ترافیک و ویژگی های جاده بر ایمنی راه: بررسی و جهت تحقیقات آینده. Saf. علمی 2013 ، 57 ، 264-275. [ Google Scholar ] [ CrossRef ]
- سازمان بهداشت جهانی (WHO). گزارش جهانی پیشگیری از آسیب های ترافیکی جاده ای ; Peden, M., Scurfield, R., Sleet, D., Mohan, D., Hyder, AA, Jarawan, E., Mathers, C., Eds. WHO: ژنو، سوئیس، 2004; پ. 217. [ Google Scholar ]
- معین الدینی، م. اسدی شکاری، ز. شاه، MZ رابطه بین شبکه های خیابانی شهری و تعداد تلفات حمل و نقل در سطح شهر. Saf. علمی 2014 ، 62 ، 114-120. [ Google Scholar ] [ CrossRef ]
- سازمان بهداشت جهانی (WHO). گزارش وضعیت جهانی ایمنی راه 2013—پشتیبانی از یک دهه اقدام . WHO: ژنو، سوئیس، 2013; پ. 318. [ Google Scholar ]
- وزارت بهداشت 2013. در دسترس آنلاین: http://www2.datasus.gov.br/DATASUS/index.php?area=0205&VObj=http://tabnet.datasus.gov.br/cgi/deftohtm.exe?sim/cnv/ext10 (دسترسی در 6 مه 2013).
- Koh، PP; Wong, YD مقایسه نیازها و رفتارهای عابران پیاده در محیطهای کاربری مختلف. J. Transp. Geogr. 2013 ، 26 ، 43-50. [ Google Scholar ] [ CrossRef ]
- فلاهوت، بی. موچارت، ام. سن مارتین، ای. توماس، I. خود همبستگی فضایی محلی و روش هسته برای شناسایی مناطق سیاه – یک رویکرد مقایسه ای. اسید. مقعدی قبلی 2003 ، 35 ، 991-1004. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- عبدالعطی، م. چوندی، اس اس; لی، سی. تحلیل ژئو فضایی و ورود به سیستم خطی تصادفات عابر پیاده و دوچرخه سوار که شامل کودکان مدرسه ای می شود. J. Saf. Res. 2007 ، 38 ، 571-579. [ Google Scholar ] [ CrossRef ]
- بلازکز، کالیفرنیا؛ Celis، MS تجزیه و تحلیل مکانی و زمانی تصادفات عابر پیاده کودک در سانتیاگو، شیلی. اسید. مقعدی قبلی 2013 ، 50 ، 304-311. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- وانگ، ی. Kockelman، KM یک مدل شرطی-خودرگرسیون پواسون لاگ نرمال برای تحلیل فضایی چند متغیره تعداد تصادف عابر پیاده در سراسر محله ها. اسید. مقعدی قبلی 2013 ، 60 ، 71-84. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- زی، ز. Yan, J. تشخیص خوشه های تصادفات ترافیکی با تخمین تراکم هسته شبکه و آمار فضایی محلی: یک رویکرد یکپارچه. J. Transp. Geogr. 2013 ، 31 ، 64-71. [ Google Scholar ] [ CrossRef ]
- امین، اس آر; زارعی، ع. آمادور-جیمنز، مدلسازی تغییرات آب و هوا و تصادفات جادهای مرتبط با آب و هوا در کانادا. ترانسپ Res. قسمت D: Transp. محیط زیست 2014 ، 32 ، 171-183. [ Google Scholar ] [ CrossRef ]
- آندراد، ال. Vissoci، JRN؛ رودریگز، سی جی; فیناتو، ک. کاروالیو، ای. پیتروبون، آر. سوزا، EM; نیهی، خوب لینچ، سی. کاروالیو، MDB تلفات ترافیکی جاده ای برزیل: تجزیه و تحلیل فضایی و محیطی PLoS ONE 2014 ، 9 ، 1-10. [ Google Scholar ]
- سلطانی، ع. عسگری، س. تحلیل حوادث ترافیکی درون شهری با استفاده از تکنیک های تجسم مکانی-زمانی. ترانسپ مخابرات J. 2014 , 15 , 227-232. [ Google Scholar ] [ CrossRef ]
- واندنبولکه، جی. توماس، آی. Panis، LI پیشبینی خطر تصادف دوچرخهسواری در بروکسل: یک رویکرد فضایی-کنترلی. اسید. مقعدی قبلی 2014 ، 62 ، 341-357. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یو، اچ. لیو، پی. چن، جی. وانگ، اچ. تجزیه و تحلیل مقایسه ای روش های تجزیه و تحلیل فضایی برای شناسایی نقاط داغ. اسید. مقعدی قبلی 2014 ، 66 ، 80-88. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- حبیبوویچ، ا. دیویدسون، جی. مکانیسمهای ایجاد علت در تصادفات کاربر جادهای از خودرو به آسیبپذیر: پیامدهایی برای سیستمهای ایمنی فعال. اسید. مقعدی قبلی 2012 ، 49 ، 493-500. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- حبیبوویچ، ا. دیویدسون، جی. الزامات یک سیستم برای کاهش تصادفات کاربران جاده ای آسیب پذیر از خودرو در تقاطع های شهری. اسید. مقعدی قبلی 2011 ، 43 ، 1570-1580. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اندرسون، تخمین چگالی کرنل TK و خوشهبندی K-means به نمایه نقاط حادثه خیز جادهای. اسید. مقعدی قبلی 2009 ، 41 ، 359-364. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- احمد، م.م. Abdel-Aty، M. ارزیابی و تجزیه و تحلیل فضایی دوربینهای اجرای خودکار نور قرمز. ترانسپ Res. قسمت ج: ظهور. تکنولوژی 2015 ، 50 ، 130-140. [ Google Scholar ] [ CrossRef ]
- Durduran, SS یک سیستم تصمیم گیری برای شناسایی خودکار حوادث ترافیکی بر اساس یک پلت فرم GIS. سیستم خبره Appl. 2010 ، 37 ، 7729-7736. [ Google Scholar ] [ CrossRef ]
- اردوغان، اس. یلماز، من. بایبورا، تی. Gullu, M. سیستم های اطلاعات جغرافیایی به کمک سیستم تجزیه و تحلیل حوادث ترافیکی مطالعه موردی: شهر افیون کاراهیسار. اسید. مقعدی قبلی 2008 ، 40 ، 174-181. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کینگهام، اس. سابل، CE; بارتی، پی. تأثیر “مدرسه مدرسه” بر تصادفات ترافیکی جاده ای: یک تحلیل مکانی – زمانی. J. Transp. Geogr. 2011 ، 19 ، 705-711. [ Google Scholar ] [ CrossRef ]
- استینبرگن، تی. آرتس، ک. توماس، I. خوشه بندی فضایی رویدادها در یک شبکه. J. Transp. Geogr. 2010 ، 18 ، 411-418. [ Google Scholar ] [ CrossRef ]
- شیائو، جی. لیو، ی. تشخیص حادثه ترافیک با استفاده از ماشین بردار پشتیبانی چند هسته ای. J. Transp. Res. هیئت 2012 ، 2324 ، 44-52. [ Google Scholar ] [ CrossRef ]
- زی، ز. Yan, J. تخمین تراکم هسته حوادث ترافیکی در فضای شبکه. محاسبه کنید. محیط زیست سیستم شهری 2008 ، 32 ، 396-406. [ Google Scholar ] [ CrossRef ]
- یالچین، جی. Duzgun، HS تجزیه و تحلیل فضایی تصادفات خودروهای دو چرخ: عثمانیه در ترکیه. KSCE J. Civ. مهندس 2015. [ CrossRef ]
- Brunsdon، C. برآورد سطوح احتمال برای داده های نقطه جغرافیایی: یک الگوریتم هسته تطبیقی. محاسبه کنید. Geosci. 1995 ، 21 ، 877-894. [ Google Scholar ] [ CrossRef ]
- Xie، X. وو، جی. برخی بهبود در نرخ همگرایی برآوردگر چگالی هسته. Appl. ریاضی. 2014 ، 5 ، 1684-1696. [ Google Scholar ] [ CrossRef ]
- سیلورمن، تخمین چگالی BW برای آمار و تجزیه و تحلیل دادهها – مونوگرافهایی در مورد آمار و احتمال کاربردی ، ویرایش اول. چپمن و هال: لندن، انگلستان، 1986; پ. 200. [ Google Scholar ]
- عصا، نماینده مجلس؛ Jones, MC Kernel Smoothing—Monographs on Statistics and Applied Probability , 1st ed.; چپمن و هال: لندن، انگلستان، 1995; پ. 212. [ Google Scholar ]
- استینبرگن، تی. دوفایس، تی. توماس، آی. Flahaut، B. مکان یابی درون شهری و خوشه بندی تصادفات جاده ای با استفاده از GIS: یک مثال بلژیکی. بین المللی جی. جئوگر. بین المللی علمی 2004 ، 18 ، 169-181. [ Google Scholar ] [ CrossRef ]
- احمد، ع. خان، کارشناسی; خورشید، MB; خان، MB; وحید، الف. برآورد تلفات تصادفات جاده ای ملی با استفاده از داده های کل. بین المللی J. Inj. Saf را کنترل کنید. ارتقاء دهید. 2015. [ CrossRef ]
- بیورنسکائو، تی. Nævestad, T.-O.; اختر، جی. ایمنی ترافیک در بین موتورسواران در نروژ: مطالعه زیر گروه ها و عوامل خطر. اسید. مقعدی قبلی 2012 ، 49 ، 50-57. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Chiou، Y.-C.; فو، سی. مدلسازی فرکانس و شدت تصادف با استفاده از مدل پواسون تعمیمیافته چند جملهای با اجزای خطا. اسید. مقعدی قبلی 2013 ، 50 ، 73-82. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کاپلان، اس. پراتو، عوامل خطر CG مرتبط با شدت تصادف اتوبوس در ایالات متحده: یک مدل لاجیت مرتب شده تعمیم یافته. J. Saf. Res. 2012 ، 43 ، 171-180. [ Google Scholar ] [ CrossRef ]
- نازیف مونوز، جی. Quesnel-Vallée، A.; ون دن برگ، A. آیا اصلاح قانون راهنمایی و رانندگی شیلی به اجرای پلیس فشار آورد؟ – درک تلفات رانندگی و کاهش جراحات در شیلی. Inj. قبلی 2014. [ CrossRef ]
- Nóbrega، LM; Cavalcante، GMS; لیما، MMSM؛ Madruga، RCR; خورخه، MLR؛ شیوع ترومای صورت و عوامل مرتبط با آن در قربانیان تصادفات جاده ای. صبح. J. Emerg. پزشکی 2014 ، 32 ، 1382–1386. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- فیلیپ، پی. چاوفتون، سی. اوریولز، ال. لاگارد، ای. آموروس، ای. لاومون، بی. آکرستد، تی. تیلارد، جی. Sagaspe، P. شکایات از خواب ضعیف و خطر تصادفات رانندگی: یک مطالعه مورد شاهدی مبتنی بر جمعیت. PLoS ONE 2014 ، 9 ، e114102. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- پیردوانی، ع. بلمنز، تی. بریج، تی. کوچان، بی. Wets, G. ارزیابی اثرات ایمنی جاده یک سیاست دورکاری با استفاده از روش رگرسیون وزندار جغرافیایی. J. Transp. Geogr. 2014 ، 39 ، 96-110. [ Google Scholar ] [ CrossRef ]
- پیردوانی، ع. بلمنز، تی. بریج، تی. Wets, G. کاربرد تکنیک رگرسیون وزنی جغرافیایی در تجزیه و تحلیل فضایی تصادفات مرگبار و جراحت. J. Transp. مهندس 2014. [ CrossRef ]
- رنگل، تی. Vassallo، JM; Arenas، B. اثربخشی مشوقهای مبتنی بر ایمنی در مشارکتهای دولتی خصوصی: شواهدی از مورد اسپانیا. ترانسپ Res. بخش A: عمل سیاست. 2012 ، 46 ، 1166-1176. [ Google Scholar ] [ CrossRef ]
- یائو، اس. لو، BPY; Lam، WWY اندازهگیری قرار گرفتن در معرض عابر پیاده مبتنی بر فعالیت در معرض خطر برخورد وسیله نقلیه با عابر پیاده: مسیر فضا-زمان در مقابل روشهای درخت مسیر بالقوه. اسید. مقعدی قبلی 2015 ، 75 ، 320-332. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Agbelie، BRDK تجزیه و تحلیل تجربی از سه چارچوب اقتصاد سنجی برای ارزیابی اثرات اقتصادی مخارج زیرساخت های حمل و نقل در سراسر کشورها. ترانسپ سیاست 2014 ، 35 ، 304-310. [ Google Scholar ] [ CrossRef ]
- کیان، ایکس. Ukkusuri، SV تغییرات فضایی تاکسی سواری شهری با استفاده از داده های GPS. Appl. Geogr. 2015 ، 59 ، 31-42. [ Google Scholar ] [ CrossRef ]
- وانگ، ی. پوتگلو، دی. اورفورد، اس. گونگ، Y. ایستگاه اتوبوس، قیمت ملک و مالیات بر ارزش زمین: تحلیل لذتگرایانه چندسطحی با کالیبراسیون چندک. سیاست کاربری زمین 2015 ، 42 ، 381-391. [ Google Scholar ] [ CrossRef ]
- چاکرابورتیا، ا. Mishra، S. استفاده از زمین و اتصالات سواری حمل و نقل: پیامدها برای آژانس های برنامه ریزی در سطح دولتی. سیاست کاربری زمین 2013 ، 30 ، 458-469. [ Google Scholar ] [ CrossRef ]
- لامبرت، دی.م. براون، جی پی؛ Florax، RJGM تخمینگر دو مرحلهای برای مدل تاخیر فضایی شمارشها: نظریه، عملکرد نمونه کوچک و یک کاربرد. Reg. علمی اقتصاد شهری 2010 ، 40 ، 241-252. [ Google Scholar ] [ CrossRef ]
- فروندونی، ر. مولو، بی. کاپوتورتی، جی. تحلیل چشمانداز تغییر پوشش زمین در شهرداری رم (ایتالیا): ویژگیهای مکانی-زمانی و پیامدهای اکولوژیکی انتقال پوشش زمین از سال 1954 تا 2001. Landsc. طرح شهری. 2011 ، 100 ، 117-128. [ Google Scholar ] [ CrossRef ]
- زور، AF; Ieno، EN; اسمیت، GM تجزیه و تحلیل داده های زیست محیطی ، 26th ed.; Springer: New York, NY, USA, 2007; پ. 672. [ Google Scholar ]
- ژانگ، ال. Gove, JH; Heath، LS تجزیه و تحلیل فضایی باقیمانده شش تکنیک مدلسازی. Ecol. مدل. 2005 ، 186 ، 154-177. [ Google Scholar ] [ CrossRef ]
- رزعلی، ن.م. مقایسه قدرت واه، وای بی تست های شاپیرو-ویلک، کولموگروف-اسمیرنوف، لیلیفورس و اندرسون-دارلینگ. J. Stat. مدل. مقعدی 2011 ، 2 ، 21-33. [ Google Scholar ]
- Lilliefors، HW در آزمون کولموگروف-اسمیرنوف برای نرمال بودن با میانگین و واریانس ناشناخته. مربا. آمار دانشیار 1967 ، 62 ، 399-402. [ Google Scholar ] [ CrossRef ]
- دانکن، DT; کواچی، آی. کوم، اس. آلدشتات، جی. پیراس، جی. متیوز، SA; آربیا، جی. کاسترو، ام سی; سفید، ک. ویلیامز، DR یک رویکرد فضایی صریح برای مطالعه نابرابری اجتماعی-جمعیتی در توزیع فضایی درختان در سراسر محلههای بوستون. تف کردن Demogr. 2014 ، 2 ، 1-29. [ Google Scholar ]
- چکمه، بی. Tiefelsdorf، M. خودهمبستگی فضایی جهانی و محلی در مجموعههای منظم محدود. جی. جئوگر. سیستم 2000 ، 2 ، 319-348. [ Google Scholar ] [ CrossRef ]
- لوریدسن، جی. کوسفلد، آر. یک استراتژی آزمایشی برای رگرسیون فضایی جعلی، ناایستایی فضایی، و هم ادغام فضایی. پاپ Reg. علمی 2006 ، 85 ، 363-377. [ Google Scholar ] [ CrossRef ]
- Anselin، L. Lagrange تشخیص تست ضریب برای وابستگی فضایی و ناهمگنی فضایی. Geogr. مقعدی 1988 ، 20 ، 1-17. [ Google Scholar ] [ CrossRef ]
- آکایک، اچ. نظریه اطلاعات و بسط اصل احتمال حداکثری. در مجموعه مقالات دومین سمپوزیوم بین المللی نظریه اطلاعات; پتروف، بی.، چاکی، اف.، ویرایش. Akadémiai Kiadó: بوداپست، مجارستان، 1973; ص 267-281. [ Google Scholar ]
- دیریک، ال. کلاسکنز، جی. Baesens, B. یک معیار اطلاعاتی آکایک برای مدلهای درمان مخلوط رویداد چندگانه. یورو جی. اوپر. Res. 2015 ، 241 ، 449-457. [ Google Scholar ] [ CrossRef ]
- سیموندز، MRE; موسلی، ع. راهنمای مختصری برای انتخاب مدل، استنتاج چند مدل و میانگینگیری مدل در بومشناسی رفتاری با استفاده از معیار اطلاعات آکایک. رفتار Ecol. Sociobiol. 2011 ، 65 ، 13-21. [ Google Scholar ] [ CrossRef ]
- مدلهای Cheung، YB Zero-inflated برای تجزیه و تحلیل رگرسیون دادههای شمارش: مطالعه رشد و توسعه. آمار پزشکی 2002 ، 21 ، 1461-1469. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- حداقل، ی. Agresti، A. مدلهای اثر تصادفی برای اندازهگیریهای مکرر دادههای تعداد تورم صفر. آمار مدل. 2005 ، 5 ، 1-19. [ Google Scholar ] [ CrossRef ]
- کمیسیون اروپایی. به سوی حمل و نقل کم کربن در اروپا – ارتباط Transporet Research an Innovation ; اتحادیه اروپا، اداره کل تحرک و حمل و نقل: بروکسل، بلژیک، 2012; پ. 24. [ Google Scholar ]
- پاسفارو، پی. ریمانو، ا. پیچینی، نماینده مجلس؛ متاستازیو، آر. گامباردلا، وی. گولاسه، جی. لتیری، سی. دوچرخه و شهر: خواسته ها و احساسات در مقابل نگرش ها، عادات و هنجارها. جی. محیط زیست. روانی 2014 ، 38 ، 76-83. [ Google Scholar ] [ CrossRef ]
- کامیلونی، ال. فرچی، س. چینی، اف. روسی، پی.جی. بورجیا، پی. Guasticchi، G. چگونه وضعیت اجتماعی-اقتصادی بر آسیب های ترافیکی جاده ای و آسیب های خانگی در رم تأثیر می گذارد. بین المللی J. Inj. Saf را کنترل کنید. ارتقاء دهید. 2013 ، 20 ، 134-143. [ Google Scholar ] [ CrossRef ]
- شورای ایمنی حمل و نقل اروپا (ETSC). شروعی چالش برانگیز به سمت هدف ایمنی جاده ای 2020 اتحادیه اروپا ؛ ششمین گزارش پین ایمنی جاده؛ ETSC: بروکسل، بلژیک، 2012; پ. 96. [ Google Scholar ]
- گوریوس، سی. سوزا، RM; جرولا، وی. ماسو، بی. رودریگز، CL; Armond، JE Acidentes de transporte de crianças e adolescentes em serviço de emergência de spital de ensino، Zona Sul da cidade de São Paulo. سوتین کشیش. Ortop. 2014 ، 49 ، 391-395. [ Google Scholar ] [ CrossRef ]
- Vasconcellos، EA ارزیابی مجدد تصادفات رانندگی در کشورهای در حال توسعه. ترانسپ سیاست 1995 ، 2 ، 263-269. [ Google Scholar ] [ CrossRef ]
- Vasconcellos، EA توسعه شهری و حوادث ترافیکی در برزیل. اسید. مقعدی قبلی 1999 ، 31 ، 319-328. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بسانی، م. دالمازو، دی. مارینلی، جی. Cirillo, C. اثرات هندسی جاده و مقررات ترافیکی بر سرعت های مورد نظر راننده در شمال ایتالیا. یک تحلیل اکتشافی ترانسپ Res. بخش F: روانی ترافیک. رفتار 2014 ، 25 ، 10-26. [ Google Scholar ] [ CrossRef ]
- وگمن، اف. ژانگ، اف. Dijkstra، A. چگونه دوچرخه سواری را برای ایمنی جاده مفید کنیم؟ اسید. مقعدی قبلی 2012 ، 44 ، 19-29. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- غفقازی، گ. هاتزوپولو، ام. حمل و نقل 2014 ، 41 ، 633-649. [ Google Scholar ] [ CrossRef ]
- آرین، سی. بریج، ک. بریج، تی. سئولمانز، دبلیو. ونرولن، جی. Jongen، EMM; دانیلز، اس. Wets, G. آیا تأثیر اقدامات آرامکننده ترافیک در طول زمان باقی میماند؟—یک مطالعه شبیهساز بر روی تأثیر دروازهها. ترانسپ Res. بخش F: روانی ترافیک. رفتار 2014 ، 22 ، 63-75. [ Google Scholar ] [ CrossRef ]
- المانی، ر. آیوسو، م. Guillén، M. تاثیر آسیب های ترافیکی جاده ای بر میزان ناتوانی و هزینه های مراقبت طولانی مدت در اسپانیا. اسید. مقعدی قبلی 2013 ، 60 ، 95-102. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سالورانی، CP; کولی، بو. کارلوتی جونیور، CG تأثیر برنامه ای برای پیشگیری از حوادث رانندگی در یک شهر جنوب برزیل: مدلی برای اجرا در یک کشور در حال توسعه. سرگ نورول. 2009 ، 72 ، 6-14. [ Google Scholar ] [ CrossRef ] [ PubMed ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر