2.1. الگوریتم تطبیق نیمه پچ بر اساس محدودیت های اپی قطبی
در این مقاله، تصاویر اپی قطبی واحد پردازش هستند و یک استراتژی تطبیق تصویر درشت تا ریز اتخاذ شده است. در روش پیشنهادی ما، تحت محدودیت اختلاف منظر اولیه، یک پنجره تطبیق بزرگ یک تصویر یک بعدی را در امتداد خط اپی قطبی جستجو میکند و برای استخراج نقاط دانه تطبیق درشت استفاده میشود. اگر اختلاف منظر درون یک جسم پیوسته باشد و همان شیء دارای بافتی ثابت در تصویر باشد، آنگاه نقطه بذر تطبیق درشت مرکز پنجره تطبیق ظریف در نظر گرفته میشود. در تصویر قطعهبندیشده، بر اساس شی قطعهبندی شده نقطه اولیه، یک محدودیت تطبیق وصله ایجاد میشود (نتیجه تقسیمبندی یک شی فقط بخشی از منطقه را در w × w اشغال میکند.پیکسل ها در اطراف نقطه بذر قرار دارند، بنابراین به آن نیمه پچ می گویند). سپس، اختلاف منظر اولیه نقاطی که باید در داخل نیم پچ مطابقت داده شوند، با توجه به شرایط هندسی نیم پچ تعیین می شود. جستجوی یک بعدی در محدوده جستجوی کوچکتری انجام می شود. در نهایت، یک الگوریتم تشخیص بیرونی برای حذف نقاط ناهماهنگ اعمال می شود.
(1) ساخت شبکه مثلثی اختلاف منظر
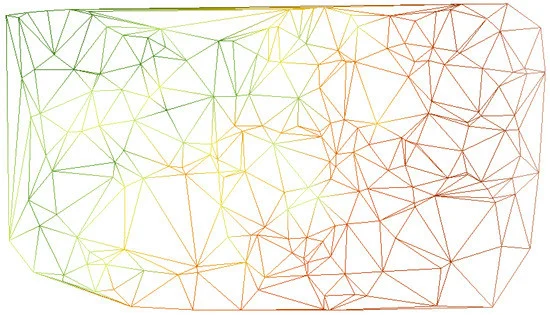
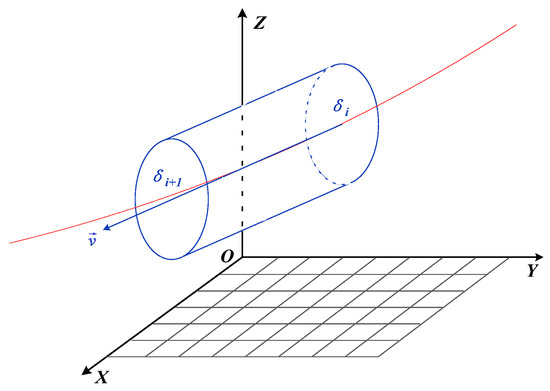
جهت گیری نسبی با استفاده از نقاط اتصال تصویر به طور خودکار اندازه گیری شده در جفت های تصویر استریو انجام می شود و جفت های تصویر اپی قطبی تولید می شوند. در همین حال، نقاط پیوند به تصویر اپی قطبی نمایش داده می شوند و مختصات و اختلاف منظر نقطه پیوند p i ( x , y ) ( i = 1, 2, …, n ) در تصویر اپی قطبی سمت چپ به دست می آید که با P ei نمایش داده می شود . x ei ، y ei ، d ei ). با توجه به الگوریتم تولید یک شبکه مثلثی نامنظم [ 14 ]، یک شبکه نامنظم مثلثی (TIN) با استفاده ازn نقطه جهت گیری نسبی و شبه رنگ های متناظر با توجه به تفاوت مقدار اختلاف منظر d ei به رئوس مثلث داده می شود . یک TIN اختلاف منظر در شکل 1 نشان داده شده است .
در شکل 1 ، رئوس مثلث ها از نقاط جهت نسبی تشکیل شده اند و شبه رنگ های متناظر با توجه به تفاوت مقدار اختلاف منظر به رئوس مثلث داده شده است.
(2) تطبیق تصویر استریو بر اساس شبکه کنترل شده اختلاف منظر
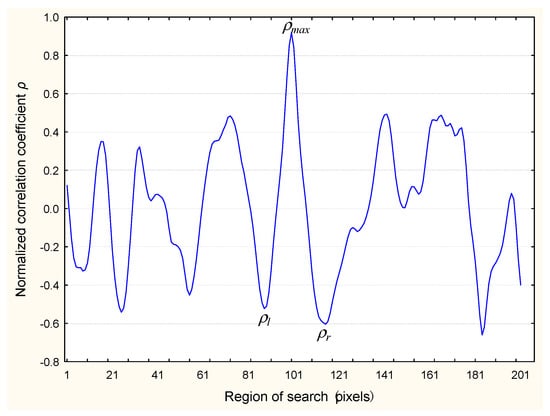
ابتدا، یک شبکه کنترل شده با اختلاف منظر P egi ( x egi ، y egi ) در تصویر اپی قطبی سمت چپ به فاصله 15 پیکسل تنظیم می شود. سپس، نقاط شبکه در یک TIN اختلاف منظر قرار می گیرند و مثلث Δ P ei P ej P ek که در آن P egi نهفته است، به دست می آید. درون یابی دوخطی بر روی منظرهای سه راس مثلث [ 15 ] انجام می شود تا منظر اولیه P egi به دست آید . سپس از 61 × 61 پیکسل به عنوان پنجره منطبق استفاده می شود. داخل [ x egi − 100, xegi + 100] در تصویر اپی قطبی سمت راست. برای هر پیکسل، ضریب همبستگی نرمال شده (CC) پنجره مربوطه مطابق با رابطه (1) محاسبه می شود و منحنی CC همانطور که در شکل 2 نشان داده شده است، تولید می شود .
که در آن ( c , r ) مختصات پیکسل متناظر پیکسل نقطه مرکزی پنجره منطبق در تصویر اپی قطبی سمت راست و مقادیر هستند g¯1�¯1و g¯2�¯2به ترتیب میانگین سطوح خاکستری پنجره منطبق در تصویر اپی قطبی چپ و راست هستند. اندازه پنجره منطبق n و i است ، j شماره خط و شماره ستون پیکسل های داخل پنجره مطابق است، و g1( ج ، من )�1(�،من)و g2( ج ، من )�2(�،من)مقادیر خاکستری پیکسل ( j , i ) در تصویر اپی قطبی سمت راست چپ و راست به ترتیب هستند.
در شکل 2 ، ρحداکثر�حداکثرمقدار اوج CC نرمال شده پنجره مطابق و پنجره جستجو در پیکسل مربوطه است. ρل�لو ρr��به ترتیب CC نرمال شده از پایین ترین نقاط کاهش یکنواخت در هر دو طرف مقدار پیک هستند. برای تعیین موفقیت آمیز بودن تطابق، معادله (2) را به صورت زیر اعمال می کنیم:
که در آن l l و l r به ترتیب فواصل پیکسلی بین مقدار پیک و پایین ترین نقاط در دو طرف مقدار پیک هستند.
از معادله (2) می توان دریافت، برخلاف اکثر الگوریتم های تطبیق مبتنی بر یک CC نرمال شده، هنگام طراحی معیار شباهت، ما نه تنها از مقدار CC نرمال شده بلکه از ویژگی های منحنی CC نیز استفاده می کنیم. در طول همبستگی تصویر، هنگام لغزش پنجره تطبیق، اگر نقطه تصویر مربوطه در منطقه جستجوی تصویر سمت راست پیدا شود، CC مطابق با یک قانون از کوچک به بزرگ و سپس از بزرگ به کوچک با نزدیکتر شدن پنجره مطابقت تغییر میکند. و از نقطه مربوطه دور می شود. قله های جدا شده در داده ها مشهود است. دو طرف مقدار پیک تقریباً متقارن هستند (همانطور که در شکل 2 نشان داده شده است ). در معادله (2) |ρل–ρr| < 0.2|�ل–��|<0.2و |لل–لr| < 5.0|لل–ل�|<5.0به ترتیب برای محدود کردن تقارن هر دو طرف قله CC استفاده می شود. [ρm a x– (ρل+ρr) / 2 ] ≥ 0.6[�مترآایکس–(�ل+��)/2]≥0.6برای محدود کردن متمایز بودن قله CC استفاده می شود.
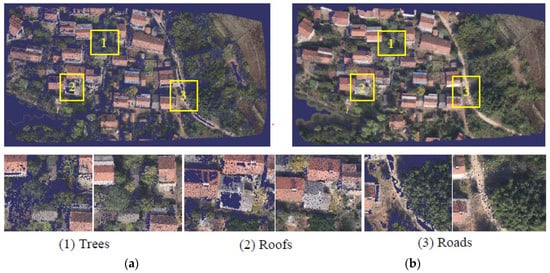
همانطور که از شکل 3 مشاهده می شود، پنجره مطابق 1 دارای بافت غنی است و اوج CC در پنجره جستجو بیشتر از 0.9 است، به این معنی که یک تطابق موفق است. منطبق با پنجره 2 همچنین دارای بافت غنی است زیرا روی سایبان قرار دارد، اما نسبتاً همگن است. اوج CC فقط 0.2 است. با این حال، یک شکل متقارن در منحنی CC نزدیک به قله وجود دارد و اختلاف CC بین قله و فرورفتگی بیشتر از 0.6 است. همچنین یک مسابقه موفق است. پنجره 3 مطابق در سایه قرار دارد. اوج CC در پنجره جستجو 0.6 را بررسی می کند، اما هیچ الگوی آشکاری از شکل منحنی CC وجود ندارد، بنابراین یک تطابق ناموفق است. از این سه حالت تطبیق معمولی، میتوانیم ببینیم که معادله (2) میتواند نرخ تطابق موفقیتآمیز را بدون معرفی نقاط عدم تطابق بیش از حد، در مقایسه با تنظیم ساده آستانه CC روی یک مقدار کمتر به منظور تطبیق نقاط چگالی، بهبود بخشد.
(3) تطبیق تصویر متراکم نیمه پچ
ما از روش تقسیمبندی تصویر مبتنی بر نمودار [ 16 ] برای بخشبندی تصویر اپی قطبی چپ استفاده میکنیم و نتیجه تقسیمبندی در شکل 4 نشان داده شده است .
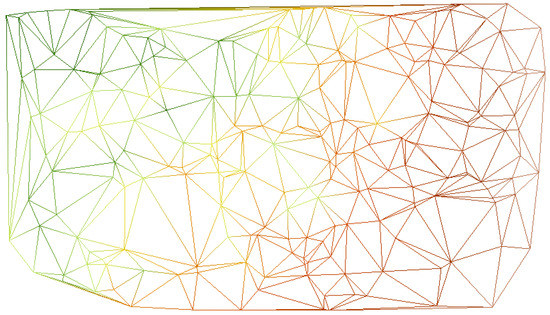
برای تطبیق پیکسل p i ،پ= {پ1،پ2، … ،پn}پ={پ1،پ2،…،پ�}، مجموعه ای از گره های شبکه واقع در ناحیه قطعه بندی شده مربوطه در شبکه کمربندی منظم اختلاف منظر، و D = {د1،د2، … ،دn}�={د1،د2،…،د�}، اختلاف منظر پیکسل ها در مجموعه را می توان به دست آورد. از آنجایی که پیکسلها در مناطق همقطعه دارای ویژگیهای بافت مشابهی در یک همسایگی محلی از فضای هدف هستند، با این فرض که سطح جسم منظم دارای بافت تصویر ثابت است، π(پایکس،پy، د)�(پایکس،پ�،د)، صفحه فضای اختلاف منظر را می توان با استفاده از مختصات نقطه تصویر در مجموعه ساخت پپو اختلاف منظر مربوطه. p i را در آن قرار دهیدπ�, معادله هواپیما; سپس d i ، اختلاف منظر اولیه را می توان به دست آورد. سپس 11 × 11 پیکسل را به عنوان یک پنجره منطبق در نظر بگیرید، در تصویر اپی قطبی سمت راست، داخل [ x egi − 20, x egi + 20] اسلاید کنید. برای هر پیکسل، CC نرمال شده پنجره مربوطه طبق رابطه (1) محاسبه می شود. سپس با توجه به رابطه (2) تعیین می کنیم که آیا تطبیق موفقیت آمیز بوده است یا خیر. مقایسه ابر نقطه منطبق با و بدون استفاده از نیمه پچ در شکل 5 نشان داده شده است .
از شکل 5 می بینیم که ابر نقطه ای که از نیمه پچ استفاده می کند، سوراخ های کمتری در مناطق جاده و پشت بام نسبت به آن بدون استفاده از نیمه لکه دارد. سوراخ ها به دلیل بافت همگن در پنجره کبریت و اختلاف منظر اولیه اجسام اطراف ایجاد می شوند. پس از استفاده از نیمه پچ، به دلیل اینکه اختلاف منظر اولیه پنجره مسابقه توسط بخش مربوطه تعیین می شود، نرخ تطابق موفقیت آمیز به ویژه در جاده ها و مناطق پشت بام بهبود می یابد. نرخ تطابق موفق در منطقه پوشش گیاهی نیز بهبود می یابد.
(4) حذف نقاط نامتناسب
همیشه برخی نقاط دورتر در ابر نقطه وجود دارد که باعث ایجاد آلارم کاذب در بازرسی راهرو خطوط برق می شود که باید حذف شوند. فاصله بین نقاط پرت و نقاط استراحت با فاصله بین نقاط غیر پرت و نقاط استراحت متفاوت است. برای ابر نقطهای حاوی N نقطه، اگر طولانیترین فاصله L بین آن نقاط غیر پرت و احتمال نقطه پرت b تنظیم شود، تعداد نقاط غیر پرت، M،را می توان تخمین زد. سپس برای هر نقطه PT در ابر نقطه یک عدد NUM می شماریم. اگر NUM کمتر از M باشد، یک عدد پرت پیدا می شود. NUM به صورت زیر محاسبه می شود: برای هر نقطه PT در ابر نقطه، NUM اولیه روی صفر تنظیم می شود، سپس در ابر نقطه تکرار می شود. اگر فاصله بین نقطه فعلی و PT کمتر از L است، یک را به NUM اضافه کنید.
فرض کنید نقطه ای که باید مطابقت داده شود p ( x , y , z ) باشد. نتایج تطبیق تیتیبه عنوان مجموعه بیان می شود پپ. اگر مجموعه دارای مجموع n نقطه باشد، فاصله بین هر دو نقطه در مجموعه را می توان به صورت زیر بیان کرد:
فرض کنید که احتمال عدم تطابق نقاط در مجموعه نقاط منطبق b است ، بنابراین تعداد نقاط به درستی تطبیق که ممکن است در مجموعه نقاط گنجانده شود، است. م= ( 1.0 – b ) × nم=(1.0–ب)×�. برای o ، هر نقطه در تیتی، اگر L ، فاصله داده شود، N ، تعداد نقاط در محدوده با مبدا o ، L به عنوان شعاع بدست می آید. اگر ن< من<م، o یک پرت است. در غیر این صورت، این یک نقطه به درستی تطبیق داده شده است. بنابراین، معیار مورد استفاده در این مقاله به دو پارامتر b و L بستگی دارد . آزمایش ها نشان داده اند که مصرف آن مناسب تر است b = 20 ٪ب=20%و L با استفاده از روش RANSAC [ 17 ] به دست می آید. برای تکرار اول ، به طور تصادفی یک نقطه را از ابر نقطه نمونه برداری کنید و انحراف استاندارد فاصله بین این نقطه و هر نقطه در ابر نقطه باقیمانده را محاسبه کنید. پس از حذف نقاطی که فاصله آنها از سه برابر این انحراف استاندارد بیشتر است، بزرگترین مقدار فاصله را به عنوان L i در نظر بگیرید . از ابر نقطه 500 بار نمونه برداری می کنیم و L = a r gمن { _ _Lمن; i = 0 … 500 }�=آ��مترمن�{�من;من=0…500}.
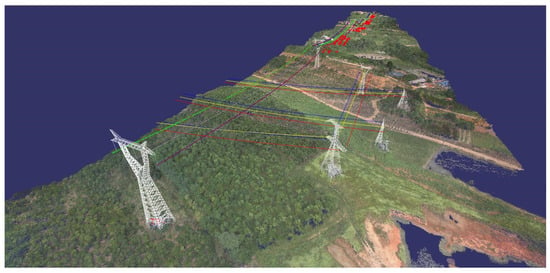
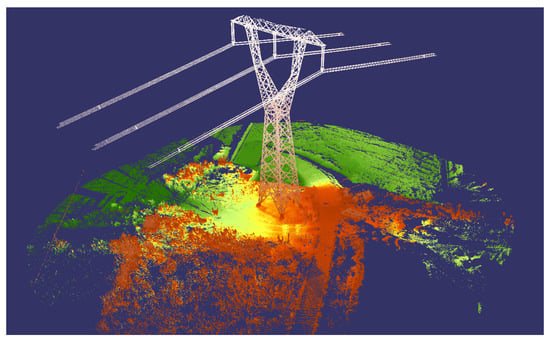
پس از 4 مرحله بالا، در نظر گرفتن تصاویر اپی قطبی به عنوان اشیایی که باید مطابقت داده شوند، نقاط پیوند تصویر بهدستآمده توسط مثلثسازی هوایی با پشتیبانی GNSS به عنوان شرایط اولیه استفاده شد. یک شبکه نامنظم مثلثی که توسط اختلاف منظر اولیه کنترل می شود ساخته شد. پس از درونیابی شبکه کنترل شده با اختلاف منظر، تطبیق نیمه وصله، و حذف نقاط ناهماهنگ، ابرهای نقطه متراکم زمین را می توان همانطور که در شکل 6 نشان داده شده است به دست آورد . رنگ بافت ابرهای نقطه ای از تصویر اپی قطبی سمت چپ گرفته شده است.
همانطور که در شکل 6 مشاهده می شود، SPMEC به بازسازی زمینی 3 بعدی راهرو خط برق، با سایبان های مورفولوژیکی دست نخورده، لبه های ساختمانی منظم، و اجزای کوچک ساختمانی شفاف مانند دودکش ها و آبگرمکن های خورشیدی، یک مدل سطح دیجیتال دقیق را برای تشخیص خودکار آن ارائه می کند. موانع در راهروهای خطوط برق برای اطلاعات بیشتر در مورد SPMEC، لطفاً ویدیو S1 (مواد تکمیلی) را ببینید . این ویدئو بازسازی سه منظره معمولی را در دالان خط برق با استفاده از SPMEC نشان میدهد: صحنه اول شامل خط برق و سطح زمین است، صحنه دوم یک سکونتگاه روستایی و صحنه سوم یک منطقه کوهستانی است.
2.2. اندازه گیری خط برق بر اساس جفت تصویر استریو از Inter-Strips
دو تصویر نوار پروازی وجود دارد که توسط پهپاد در طول بازرسی راهرو خطوط برق گرفته شده است. هر طرف خط برق یک نوار دارد. جهت خط اپی قطبی جفت تصاویر استریو در یک نوار تقریباً موازی با خط برق است و قرار دادن مکان نما بر روی نقاط مربوطه روی خط برق را دشوار می کند و ممکن است اندازه گیری خط برق با شکست مواجه شود.
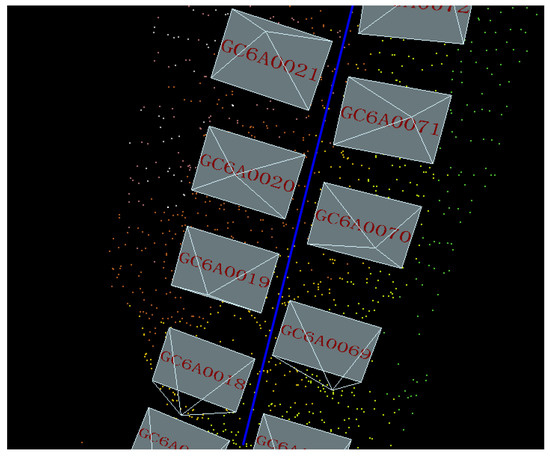
همانطور که در شکل 7 نشان داده شده است ، دو نوار پرواز در امتداد خط برق وجود دارد. اهرام به معنای موقعیت و جهت تصاویر هستند. نقاط رنگی شبه نقاط عبور هستند. در حین مشاهده دستی استریو، ارتفاع مکان نما اندازه گیری توسط x-parallax تنظیم می شود. از آنجایی که جهت خط برق تقریباً موازی با خط اپی قطبی است، هنگام تنظیم پارالاکس x، مسیر حرکت مکان نما اندازه گیری با خط اپی قطبی منطبق است (نشان داده شده در شکل 8) .الف) اندازه گیری نقطه مربوطه در خط برق را دشوار می کند. برای سهولت اندازه گیری استریو، باید خط اپی قطبی جفت تصویر استریو را عمود بر خط برق قرار دهیم، چنین جفت تصویر استریو را می توان با استفاده از تصاویر در طرف های مختلف سیم برق به دست آورد.
همانطور که در شکل 8 ب مشاهده می شود، با استفاده از جفت های تصویر استریو که نوارهای بین نواری را برای اندازه گیری خط برق تشکیل می دهند، جهت خط پایه جفت تصویر استریو تقریباً بر جهت خط برق عمود است. بنابراین، جهت اپی قطبی جفت های تصویر استریو تقریباً عمود بر جهت خط برق است. نقطه تقاطع خط اپی قطبی و خط برق نقطه مربوطه در خط برق است.
هنگام انجام اندازه گیری دستی، اپراتور فقط باید مکان نما اندازه گیری (صلیب قرمز) را در نقطه مربوطه در خط برق تنظیم کند. به دلیل گرانش، خط برق باید با استفاده از چند خط به جای یک خط مستقیم مدلسازی شود. بنابراین، کل خط برق بین دو پست نیاز به اندازه گیری حدود 30 جفت نقطه متناظر برای مدل سازی چند خط دارد. دقت اندازه گیری دستی خط برق تنها به وضوح تصویر زمینی تصاویر پهپاد بستگی دارد. به منظور دستیابی به وضوح تصویر کافی، قبل از بازرسی راهرو خط برق، ارتفاع پرواز مناسبی را با استفاده از فاصله کانونی دوربین طراحی کردیم. از این رو، برای اندازهگیری خط برق، تنها چیزی که لازم است این است که مطمئن شوید مکاننمای اندازهگیری چپ و راست در خط برق مربوطه تراز هستند.








بدون نظر