1. معرفی
دستگاه های تلفن همراه، از جمله اقلام پوشیدنی، به طور فزاینده ای محبوب و مقرون به صرفه هستند و به طور گسترده در زمینه های مختلف و برای برنامه های مختلف، مانند نظارت و مدیریت ورزش، مراقبت های بهداشتی، خدمات مبتنی بر مکان (LBS) و ناوبری استفاده می شوند [1 ، 2 ]]. تقاضا برای LBS برای عابران پیاده در محیط های داخلی و خارجی نیز به طور چشمگیری افزایش یافته است. فناوری های مکان یابی و ناوبری با استفاده از سیستم های ماهواره ای ناوبری جهانی (GNSS) در فضاهای باز و بیرونی بسیار قابل اعتماد و دقیق هستند. با این حال، سیگنال های GNSS همیشه در دسترس نیستند، به خصوص در محیط های محروم از GNSS، مانند محیط های داخلی، زیرزمینی و در مناطق شهری. مشکل ناوبری در مناطق شهری را می توان با ادغام GNSS با سیستم ناوبری اینرسی (INS) [ 3 ، 4 ] کاهش داد. با این وجود، از آنجایی که سیگنالهای GNSS در داخل خانه در دسترس نیستند، روشهای ناوبری مختلفی با تکیه بر فناوریهای مختلف، مانند مجاورت، مثلثسازی، انگشت نگاری و محاسبه مرده پیشنهاد شدهاند [5] .]. از آنجایی که روش محاسبه مرده نیاز به زیرساخت کمی یا بدون نیاز به از پیش نصب شده در ساختمان ها دارد، سیستم های محاسبه مرده عابر پیاده (PDR) به یک راه حل محبوب برای موقعیت یابی و ناوبری داخل ساختمان تبدیل شده اند [ 6 ، 7 ].
روشهای محاسبه مرده از حسگرهای اینرسی، شتابسنجها و ژیروسکوپها برای تخمین یک مکان نسبی و استخراج یک مکان فعلی با اضافه کردن جابجایی تخمینی بر اساس دادههای فاصله و مسیر در رابطه با مکان تخمینزده شده قبلی استفاده میکنند. مسافت متحرک و عنوان کاربر را می توان از یک سیستم INS یا Step-and-Heading (SHS) بدست آورد [ 2 ]. یک INS یک سیستم مستقل است [ 7]، که به این معنی است که هیچ سیگنال خارجی دیگری مورد نیاز نیست و به طور مداوم موقعیت، جهت و سرعت یک جسم متحرک را با ادغام داده های شتاب سنج، ژیروسکوپ و مغناطیس سنج محاسبه می کند. با این حال، سنسورهای اینرسی دارای یک مشکل دریفت هستند که در آن خطاها در طول زمان انباشته می شوند. علاوه بر این، اکثر سنسورهای اینرسی سطح بالا برای اکثر مصرف کنندگان گران و بزرگ هستند. این اندازه بزرگتر حمل یا پوشیدن آن را دشوارتر می کند. در همین حال، SHS نیز یک سیستم مستقل است که توسط عابران پیاده استفاده می شود. محاسبات پیچیده یک INS را ساده می کند و فقط از شتاب سنج و ژیروسکوپ برای تخمین تعداد گام ها، فاصله گام ها و عنوان کاربر استفاده می کند. هر دو ژیروسکوپ و مغناطیس سنج می توانند برای استخراج عنوان کاربر استفاده شوند. اما این دو سنسور دارای اشکالاتی در موقعیت یابی و ناوبری داخل ساختمان هستند. عنوانی که از ژیروسکوپ مشتق شده است از مشکل دریفت رنج می برد و در گذر زمان خطاهایی را جمع آوری می کند. انحرافات ژیروسکوپ را می توان با استفاده از یک روش کالیبراسیون دقیق کاهش داد یا از طریق روش های دیگری مانند اثر انگشت اصلاح کرد.8 ] یا تطبیق نقشه [ 9 ، 10 ، 11 ]. یک مغناطیسسنج بزرگی میدان مغناطیسی زمین را برای تخمین سمت کاربر اندازهگیری میکند، اما در داخل خانه این امر تحت تأثیر منابع طبیعی و مصنوعی مغناطیسی است. تغییرات میدان مغناطیسی در داخل ساختمان ها را می توان در آهن، کبالت یا نیکل یافت. همچنین میتواند از منابع دستساز دیگر مانند سازههای فولادی، سیستمهای قدرت الکتریکی و وسایل الکترونیکی رخ دهد [ 12 ، 13]]. این دلیل اصلی عدم استفاده از مغناطیسسنجها برای کمک به تخمین عنوان است. با این حال، برخی از مطالعات وجود دارد که اثر انگشت مغناطیسی را اتخاذ کرده و از ناهنجاریهای میدان مغناطیسی داخل یک ساختمان، که فرض میشود ثابت هستند و دارای تنوع محلی کافی هستند، برای دستیابی به خود محلیسازی جهانی داخلی استفاده کردهاند [13 ، 14 ] .
با پیشرفت سریع در دستگاههای موبایل و پوشیدنی، سنسورهای اینرسی در حال حاضر معمولاً در دستگاههای پیشرفته مانند تلفنهای هوشمند استفاده میشوند که از نظر تئوری برای سیستمهای PDR مناسب هستند. موقعیت سنسورهای اینرسی روی بدن، مانند دست کاربر [ 15 ]، کمر [ 16 ]، جیب [ 17 ]، و پا [ 18 ، 19]]، تأثیر قابل توجهی بر دقت، قابلیت اطمینان و استفاده از PDR ها دارد. علاوه بر این، به دلیل پیشرفت در فناوری سیستمهای میکرو الکترومکانیکی (MEMS)، سنسورهای اینرسی پوشیدنی و مینیاتوری بر اساس آن به سنسورهای اصلی مورد استفاده برای PDR تبدیل شدهاند. با این حال، به دلیل ملاحظات هزینه، اکثر لوازم الکترونیکی مصرفی از سنسورهای MEMS کمهزینه استفاده میکنند که در مقایسه با دستگاههای گرانتر، عملکرد پایینتری دارند و نویز بیشتری تولید میکنند. بنابراین، ادغام و ترکیب سنسورها و الگوریتم های مختلف برای افزایش دقت و قابلیت استفاده از PDR با سنسورهای کم هزینه مورد نیاز است. علاوه بر این، خطاهای حسگر سنسورهای کم هزینه نیز باید کالیبره شوند [ 20 ، 21 ].
با توجه به فاصله متحرک کاربر، الگوریتمهای تخمین طول مرحله (SLE) بر اساس شتابسنجها با موفقیت در PDR در بسیاری از مطالعات پیادهسازی شدهاند [ 21 ، 22 ، 23 ]. الگوریتم های SLE را می توان به روش های مبتنی بر مدل و دانش تقسیم کرد. گروه اول را می توان به دو گروه طبقه بندی کرد، یکی بر اساس مدل های بیومکانیکی و دیگری بر اساس روابط تجربی [ 21 ]. یک مدل آونگ معکوس برای حرکت لگن در طول یک گام توسط Zijlstra و همکاران ارائه شد. [ 24 ، 25]. با این حال، این مدل به جزئیات طول پا نیاز دارد و به کالیبراسیون کاربر حساس است. برای غلبه بر این اشکالات، یک مدل تقریبی که نیازی به اطلاعات طول پا ندارد توسط Weinberg و همکاران ارائه شد. [ 26 ]. طول گام پویا را از جابجایی عمودی لگن تخمین می زند. با این حال، نتایجی که آنها گزارش کردند نشان می دهد که طول گام می تواند تا 40٪ بین عابران پیاده که با همان سرعت راه می روند و تا 50٪ در محدوده سرعت راه رفتن افراد متفاوت باشد [2 ] . واینبرگ و همکارانبر اساس مدلی که آنها پیشنهاد کردند، یک سیستم PDR با تسمه به پایین ارائه کردند. نتایج تجربی نشان داد که حداکثر خطای نسبی بین 23/4 تا 44/18 درصد و میانگین خطاها بین 3 تا 8 درصد بود [ 16 ].
در حال حاضر، با توجه به روشهای مبتنی بر دانش، شبکههای عصبی مصنوعی (ANN) و منطق فازی (FL) الگوریتمهای اولیه مورد استفاده هستند [ 27 ]. یک سیستم ناوبری GNSS/INS با استفاده از یک روش مبتنی بر دانش برای مدلسازی حرکت انسان پیشنهاد شد، و حسگرهای اتخاذ شده از این سیستم زمانی که سیگنالهای GNSS در دسترس هستند به طور پیوسته کالیبره میشوند [ 28 ]. شش پارامتر وجود دارد که حاوی اطلاعات مربوط به طول گام است. آنها عبارتند از فرکانس گام، میانگین شتاب اوج به اوج، تغییرات اوج به اوج در شتاب، شیب زمین، تغییر در ارتفاع فشارسنجی در طول یک چرخه راه رفتن و ارتفاع سوژه [28 ] . نتایج نشان داد که دقت این سیستم 3-5 متر CEP (خطای دایره ای محتمل) 50 درصد است. با این حال، مطالعه در [28 ] برای کالیبره کردن مدلهای خود به دستگاههای GNSS و INS با کارایی بالا نیاز داشت و بار محاسباتی الگوریتمهای پیشنهادی به سادگی برای سیستمهای تعبیهشده کمهزینه امکانپذیر نخواهد بود.
هدف از این مطالعه توسعه یک روش SLE دقیق و قابل استفاده برای سیستم PDR با ویژگیهای طیف وسیعی از SLE، یک سیستم مستقل و محاسبات بلادرنگ است. به منظور دستیابی به یک قابلیت مستقل، یک ماژول حسگر اینرسی توسعه داده شده است و خطاهای حسگر این ماژول با روش کالیبراسیون سنسور بر اساس کالیبراسیون اسکالر و همچنین روش حداقل مربعات برای بهبود دقت کالیبره میشوند. حسگرهای اینرسی [ 29 ]. پارامترهای اعمال شده در این مطالعه عوامل مقیاس، سوگیری ها و زوایای متعامدسازی هستند. دیگر طرحهای کالیبراسیون تعمیمیافته برای واحد اندازهگیری اینرسی کمهزینه (IMU) و حسگرهای گوشیهای هوشمند را میتوان در مطالعات [ 30 ، 31] یافت.]. با در دست داشتن این دادههای اینرسی کالیبرهشده، یک سیستم PDR مبتنی بر همجوشی چند حسگر و الگوریتمهای FL SLE توسعه داده شده است. اساساً، نقاط قوت FL کاهش عمق و پیچیدگی محاسبات، و بهبود دقت و سادهسازی الگوریتم موقعیتیابی از طریق استفاده از یک اکتشافی نسبتاً ساده است که ترکیبی از مناسبترین قوانین را تعیین میکند. به خاطر داشته باشید که یک سیستم ناوبری داخلی پیشرفته که سعی میکند اطلاعات لازم را از طریق خرد کردن اعداد خالص، با پیچیدگی محاسباتی بالا، تعیین کند، احتمالاً ظرف چند ساعت باعث تخلیه کامل باتری میشود، مخصوصاً برای دستگاههای قابل حمل و پوشیدنی. علاوه بر این، از آنجایی که FL از قواعد زبانی تشکیل شده است، می توان آن را به راحتی در اکثر واحدهای پردازش میکرو (MCU) پیاده سازی کرد تا نیاز محاسبات بلادرنگ را برآورده کند. اینها دلایلی هستند که چرا FL به عنوان روش SLE در این مطالعه انتخاب شده است. با مزایای FL و PDR، روش پیشنهادی در اینجا به راحتی بر روی دستگاه های پوشیدنی نصب شده بر روی کمر به صورت بلادرنگ پیاده سازی می شود و برای محیط های داخلی و خارجی در نظر گرفته شده در این مطالعه بدون نیاز به اطلاعات نقشه و زیرساخت های از پیش نصب شده مناسب است. .
2. نمای کلی سیستم
2.1. طرح ناوبری عابر پیاده
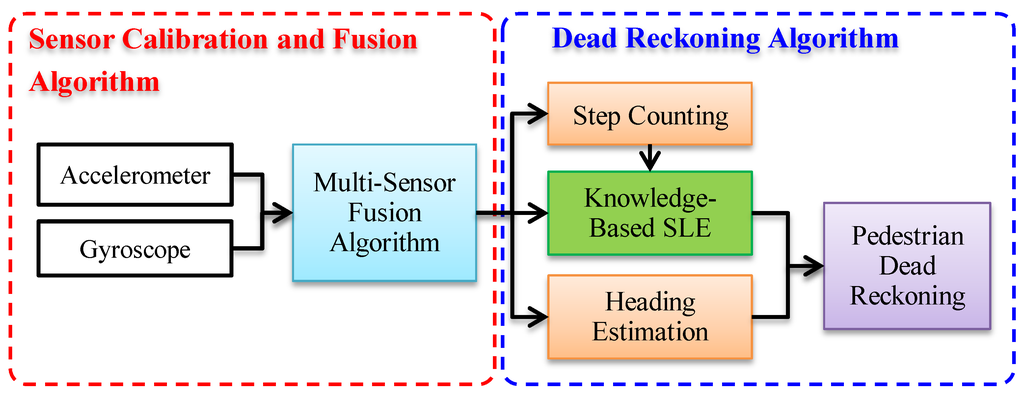
یک سیستم PDR عابر پیاده در این مطالعه برای نشان دادن قابلیت زیست روش های پیشنهادی بالا، با بلوک دیاگرام سیستم نشان داده شده در شکل 1، طراحی و اجرا شد.. در این شکل بلوک دیاگرام از دو بخش الگوریتم کالیبراسیون سنسور و فیوژن و همچنین الگوریتم محاسبه مرده تشکیل شده است. جریان داده بلوک دیاگرام سیستم به شرح زیر است. در بخش کالیبراسیون و فیوژن سنسور، پس از راه اندازی ماژول حسگر، سنسورهای اینرسی با استفاده از روش کالیبراسیون پیشنهادی کالیبره شدند. سپس، پارامترهای کالیبراسیون بهدستآمده از سنسورهای اینرسی در بلوک الگوریتم فیوژن چند سنسور برای کالیبره کردن شتاب و نرخ زاویهای که از سنسورهای اینرسی اندازهگیری میشود، استفاده شد. بلوک الگوریتم فیوژن چند سنسور کالیبراسیون سنسور، پردازش سیگنال و تخمین جهت گیری ماژول حسگر را انجام می دهد. به منظور به دست آوردن اطلاعات جابجایی قابل اعتمادتر کاربر، دادههای شتاب با استفاده از ماتریس چرخش با جهت تخمینی از قاب بدنه آنها به یک قاب افقی محلی منتقل میشوند. در بخش محاسبه مرده، با داده های کالیبره شده و جهت گیری تخمینی ماژول حسگر، بلوک Step Counting تعداد گام، فرکانس گام و قدرت گام را در اختیار بلوک SLE مبتنی بر دانش قرار می دهد که طول گام کاربر را تخمین می زند. با استفاده از روش FL SLE پیشنهادی. بلوک Heading Estimation از داده های کالیبره شده برای محاسبه جهت راه رفتن کاربر استفاده می کند. با طول تخمینی گام و سرفصل، بلوک محاسبه مرده عابر پیاده از الگوریتم محاسبه مرده مبتنی بر گام و سرفصل برای تخمین مکان کاربر در طول زمان استفاده میکند. با داده های کالیبره شده و جهت گیری تخمینی ماژول حسگر، بلوک Step Counting تعداد گام، فرکانس گام و قدرت گام را به بلوک SLE مبتنی بر دانش ارائه می دهد که طول گام کاربر را با استفاده از روش FL SLE پیشنهادی تخمین می زند. . بلوک Heading Estimation از داده های کالیبره شده برای محاسبه جهت راه رفتن کاربر استفاده می کند. با طول تخمینی گام و سرفصل، بلوک محاسبه مرده عابر پیاده از الگوریتم محاسبه مرده مبتنی بر گام و سرفصل برای تخمین مکان کاربر در طول زمان استفاده میکند. با داده های کالیبره شده و جهت گیری تخمینی ماژول حسگر، بلوک Step Counting تعداد گام، فرکانس گام و قدرت گام را به بلوک SLE مبتنی بر دانش ارائه می دهد که طول گام کاربر را با استفاده از روش FL SLE پیشنهادی تخمین می زند. . بلوک Heading Estimation از داده های کالیبره شده برای محاسبه جهت راه رفتن کاربر استفاده می کند. با طول تخمینی گام و سرفصل، بلوک محاسبه مرده عابر پیاده از الگوریتم محاسبه مرده مبتنی بر گام و سرفصل برای تخمین مکان کاربر در طول زمان استفاده میکند. بلوک Heading Estimation از داده های کالیبره شده برای محاسبه جهت راه رفتن کاربر استفاده می کند. با طول تخمینی گام و سرفصل، بلوک محاسبه مرده عابر پیاده از الگوریتم محاسبه مرده مبتنی بر گام و سرفصل برای تخمین مکان کاربر در طول زمان استفاده میکند. بلوک Heading Estimation از داده های کالیبره شده برای محاسبه جهت راه رفتن کاربر استفاده می کند. با طول تخمینی گام و سرفصل، بلوک محاسبه مرده عابر پیاده از الگوریتم محاسبه مرده مبتنی بر گام و سرفصل برای تخمین مکان کاربر در طول زمان استفاده میکند.
2.2. پیکربندی و راه اندازی سیستم
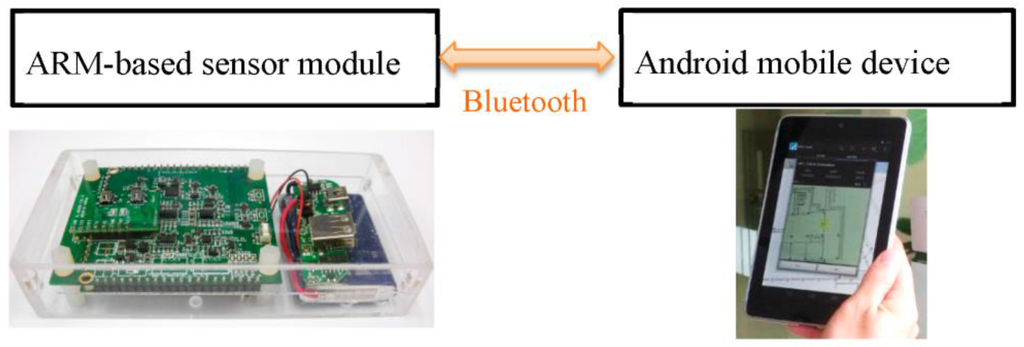
پیکربندی سیستم و راه اندازی PDR پیشنهادی بر اساس یک نمودار بلوک سیستم است، همانطور که قبلا ذکر شد. با توجه به انعطاف پذیری و قدرت محاسباتی سیستم، PDR به گونه ای طراحی شده است که یک طرح محاسباتی توزیع شده با دو دستگاه، شامل یک ماژول حسگر و یک دستگاه نظارت، همانطور که در شکل 2 ارائه شده است، باشد .. ماژول حسگر از دو سنسور اینرسی، یک ماژول بلوتوث و یک MCU تشکیل شده است. MCU مورد استفاده در ماژول حسگر یک پردازنده 32 بیتی ARM Cortex-M4 است که توسط STMicroelectronics تولید شده است. ماژول حسگر، سیستم PDR پیشنهادی را که بر روی MCU اجرا میشود، بهصورت بلادرنگ اجرا میکند و میتواند طول گام تخمینی و حرکت را از طریق بلوتوث به مانیتور، که میتواند یک دستگاه تلفن همراه مانند لپتاپ، تلفن هوشمند یا تبلت باشد، منتقل کند. دستگاه مانیتورینگ مکان کاربر را بر روی یک نقشه از پیش بارگذاری شده نمایش می دهد. در این مطالعه، یک دستگاه تلفن همراه اندرویدی به عنوان دستگاه مانیتورینگ پذیرفته شد و یک برنامه اندرویدی خودساخته در دستگاه تلفن همراه مذکور نصب شد تا مکان فعلی کاربر را در زمان واقعی نمایش دهد.
سنسورهای مورد استفاده در ماژول سنسور شتاب سنج و ژیروسکوپ ارزان قیمت MEMS هستند. این حسگرها به طور گسترده در کاربردهای مختلف مانند ردیابی حرکت بدن انسان و کنترل پرواز پهپادهای مصرفی استفاده می شوند. حسگرهای اینرسی حرکت اینرسی را به سیگنال های آنالوگ یا دیجیتال تبدیل می کنند. از مزایای سنسورهای MEMS میتوان به کمهزینه بودن، وزن سبک و اندازه کوچک آنها اشاره کرد، اما این نیز نشان میدهد که عملکرد کمتری نسبت به دستگاههای گرانتر دارند. در واقع، اشکال عمده سنسورهای ارزان قیمت نویز زیاد و خطاهای اندازه گیری آنهاست. به همین دلیل است که کالیبراسیون و تأیید ماژول حسگر برای افزایش دقت و عملکرد آن قبل از استفاده حیاتی است.
با توجه به اندازه گیری حسگرهای اینرسی، شتاب سنج شتاب عینی را به مقادیر فیزیکی با واحدهای m/s 2 یا g منتقل می کند که دومی مقدار میدان گرانشی زمین است. ژیروسکوپ چرخش اعتراض را به مقادیر فیزیکی با واحد در درجه بر ثانیه منتقل می کند. یک شتاب سنج سه محوره و یک ژیروسکوپ سه محوره در ماژول حسگر توسعه یافته استفاده شده است. در این مطالعه، شتابسنج مورد استفاده، شتابسنج KXR94-2050 با محدوده خروجی در مقیاس کامل 2 ± گرم (19.6 m/s 2) بود.تولید شده توسط Kionix, Inc. (Ithaca, NY, USA). ژیروسکوپ مورد استفاده یک ژیروسکوپ A3G4250D با محدوده خروجی در مقیاس کامل ± 245 درجه بر ثانیه بود که توسط STMicroelectronics تولید شد. مشخصات اصلی دو سنسور مورد استفاده مستقیماً در جدول 1 در زیر آمده است .
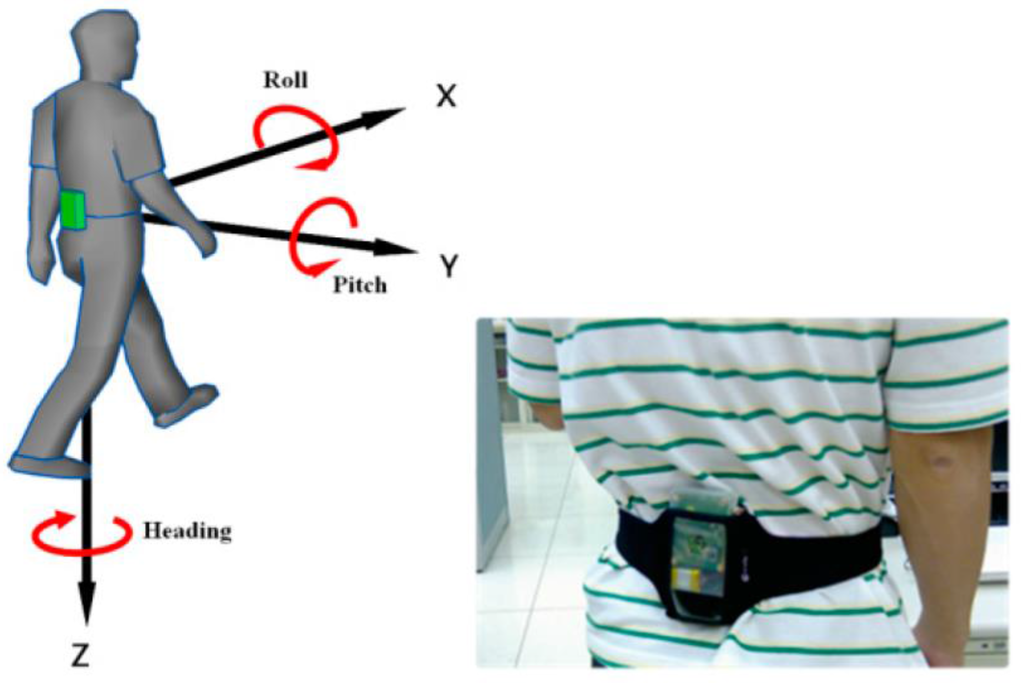
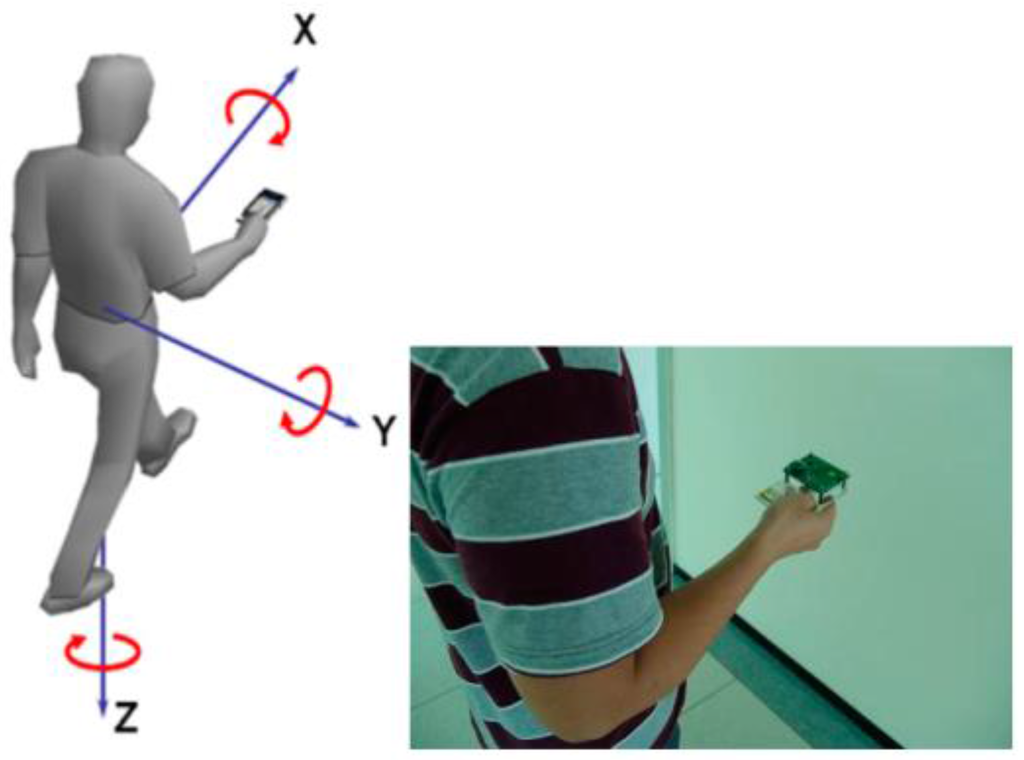
همانطور که در شکل 3 و شکل 4 نشان داده شده است، ماژول حسگر به گونه ای طراحی شده است که روی کمر یا دستی نصب شود.زیر پس از چند آزمایش اولیه، نتایج نشان داد که در همان آزمایش انحراف معیار زاویه گام تخمینی 1.09 درجه اندازهگیری شده از نوع کمری و 5.62 درجه اندازهگیری شده از نوع دستی بود. بنابراین، نوع نصب شده بر روی کمر به دلیل دقت و قابلیت اطمینان بالاتر نسبت به نوع دستی برای اجرای PDR در این مطالعه انتخاب شد. نوع کمری دارای قابلیت توصیف دقیق تر حرکات و اعمال اندام تحتانی است. در مقابل، نوع دستی تحت تأثیر نحوه نگه داشتن دستگاه توسط کاربر و اینکه آیا کاربر در حال خواندن پیامی روی صفحه است یا خیر، قرار می گیرد. بنابراین، آزمایشها و آزمایشهای زیر بر اساس نوع نصب شده بر روی کمر انجام شد و ماژول حسگر همانطور که در شکل 3 مشاهده میشود، به پشت کمر کاربر متصل شد .
3. کالیبراسیون سنسور و الگوریتم فیوژن چند سنسور
3.1. مدل خطای سنسور و روش کالیبراسیون
با توجه به نویز زیاد و خطاهای سنسورهای ارزان قیمت MEMS که در نتیجه عیوب ساخت و سایر خطاها ایجاد می شود، قبل از اینکه بتوان آنها را به طور موثر و قابل اطمینان استفاده کرد، یک روش کالیبراسیون لازم است. چنین خطاهایی را اساساً می توان به دو دسته تقسیم کرد: خطاهای فرآیند تصادفی ثابت تصادفی و خطاهای فرآیند تصادفی مرتبط با زمان [ 32 ]. از آنجایی که نمایش دینامیکی خطاهای ثابت تصادفی ساده است، و اینها تأثیر قابل توجهی بر عملکرد سنسور دارند، پارامترهای کالیبراسیون انتخاب شده برای این مطالعه، خطاهای ثابت تصادفی هستند که می توانند از سه گانه حسگر از عوامل مقیاس، سوگیری ها و زوایای متعامد مدل خطای حسگر برای سه گانه خطای سنسور مشخص شده به شرح زیر است [ 29 ]:
جایی که y⇀�⇀، تو⇀�⇀, K , T , و ب→�→به ترتیب خروجی های حسگر، کمیت فیزیکی مشاهده شده، ماتریس ضریب مقیاس، ماتریس زاویه های متعامد و بردار بایاس را نشان می دهند. جزئیات K , T , و ب→�→به شرح زیر است [ 29 ]:
جایی که αایکس��، αy��، و αz��زوایای غیر متعامد را نشان می دهد.
مدل حسگر برای دو سه گانه حسگر مختلف، که سه گانه شتاب سنج و سه گانه ژیروسکوپ در این مطالعه هستند، اعمال شد. با ماژول حسگر پیشنهادی این مطالعه، روش های کالیبراسیون برای هر سه گانه حسگر را می توان با چرخش سنسورها به چرخش های تصادفی یا مشخص شده مختلف انجام داد. برای هر سه گانه حسگر، 9 پارامتر وجود دارد که باید تعیین شود: سه عامل مقیاس، سه بایاس و سه زاویه غیر متعامد. این بدان معناست که برای تعیین این پارامترها به 9 جهت و چرخش یا بیشتر نیاز است. کالیبراسیون برای هر سه گانه حسگر با استفاده از کالیبراسیون اسکالر و روش های حداقل مربعات انجام می شود [ 29 ].
3.2. کالیبراسیون شتاب سنج
کالیبراسیون سهگانه شتابسنج را میتوان با استفاده از بزرگی میدان گرانشی زمین، که در یک مکان مشخص بدون تأثیر سایر اختلالات ثابت است، انجام داد. بنابراین، مقدار مرجع سه گانه شتاب سنج ثابت گرانشی است که با 1 گرم نشان داده می شود. این یک ثابت فیزیکی تجربی است و مستقل از جهت گیری های ماژول حسگر زمانی که ثابت است. به همین دلیل، جهت گیری های دقیق این سه گانه حسگر مورد نیاز نیست، اما لازم است در هنگام به دست آوردن داده، سه گانه ثابت نگه داشته شود.
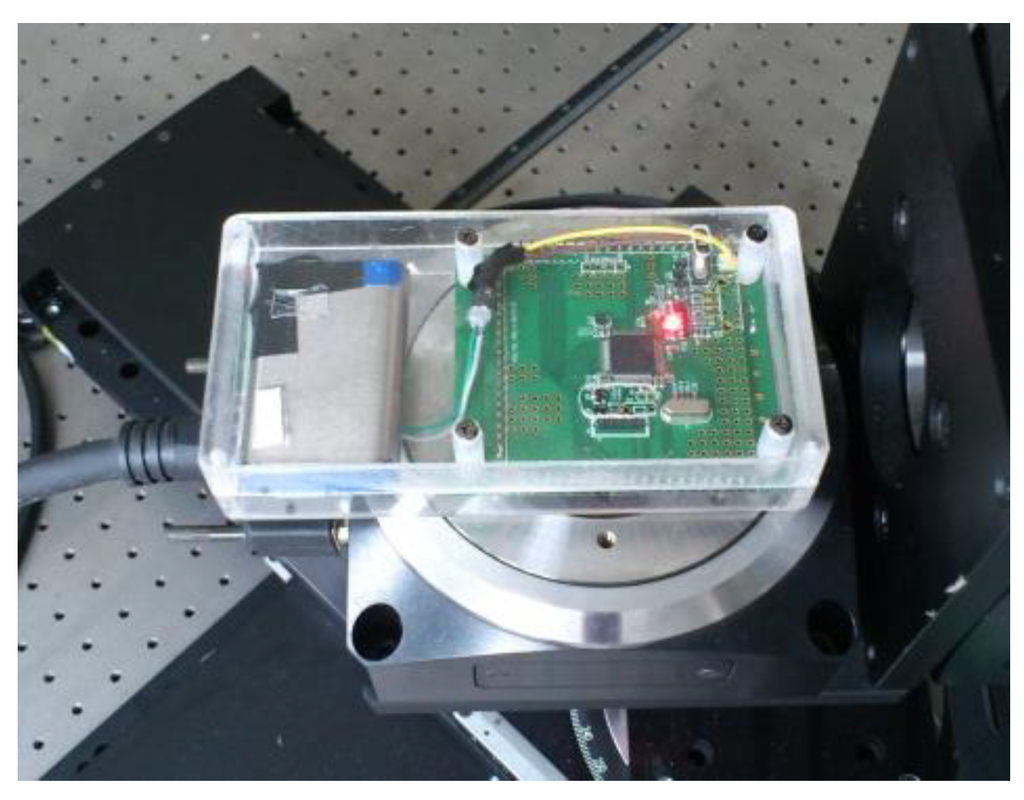
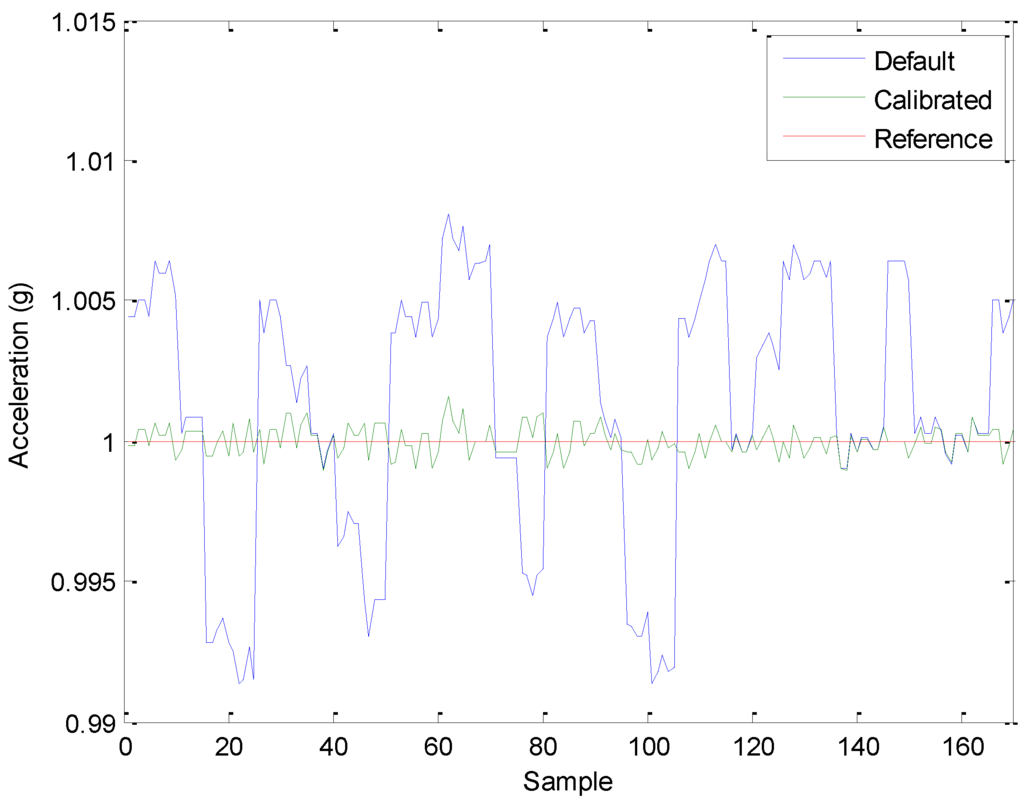
کالیبراسیون سه گانه شتاب سنج در این مطالعه بر روی یک پلت فرم انتقال و چرخش شش محوره انجام شد، همانطور که در شکل 5 نشان داده شده است . با تثبیت سه گانه حسگر به حداقل نه جهت مختلف روی پلت فرم و اعمال بهینه سازی حداقل مربعات، بردار 9 پارامتری را می توان تعیین کرد. نتایج کالیبراسیون سه گانه شتاب سنج در جدول 2 ارائه شده است . شکل 6 نشان می دهد که حاشیه خطای سه گانه شتاب سنج 0.3 درصد شتاب گرانشی است.
3.3. کالیبراسیون ژیروسکوپ
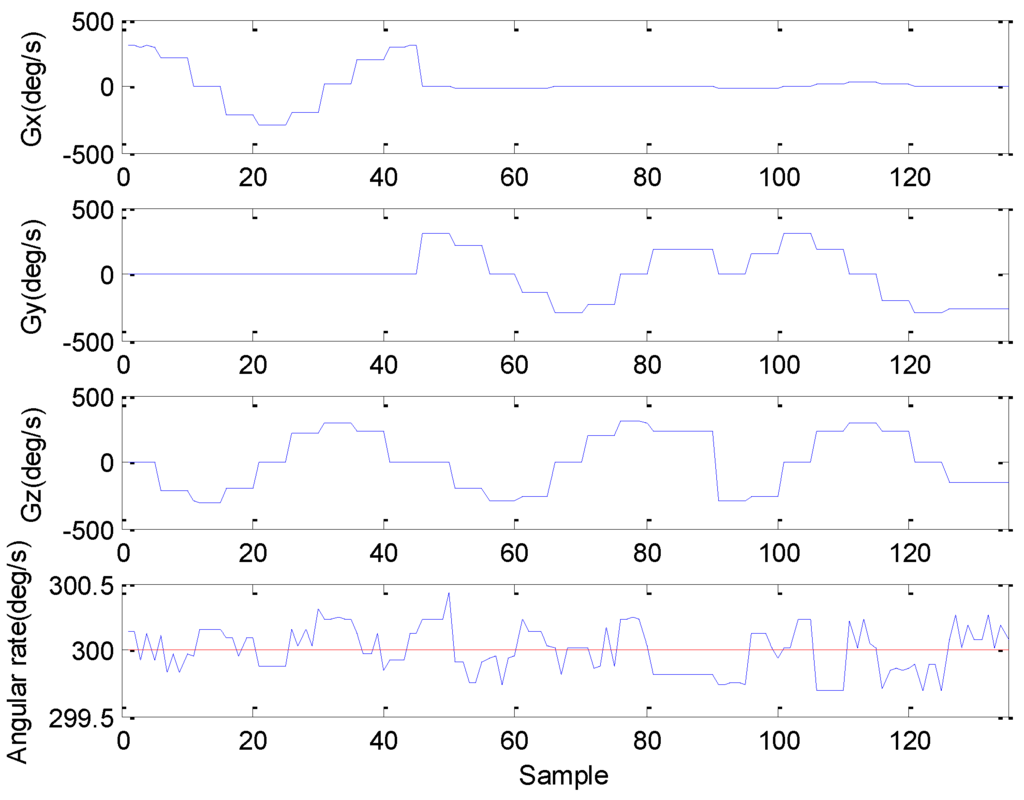
کالیبراسیون سه گانه ژیروسکوپ را می توان با اعمال کالیبراسیون اسکالر روی یک پلت فرم چرخشی نیز انجام داد. در این مطالعه، یک سکوی چرخشی تک محوری برای انجام کالیبراسیون سه گانه ژیروسکوپ استفاده شد. پلت فرم سه گانه حسگر را در جهت دلخواه نگه داشت و چرخش مشخصی را با نرخ زاویه ای ثابت انجام داد. بنابراین، مقدار مرجع سه گانه حسگر دوار می تواند تعیین شود. برای این مطالعه، نرخ زاویه ای مشخص شده در طول کالیبراسیون روی 300 درجه بر ثانیه تنظیم شد. علاوه بر این، سوگیری های دقت سه گانه ژیروسکوپ ابتدا با نگه داشتن پلت فرم در شرایط ایستا مشخص شد. پس از تعیین سوگیری ها، پارامترهای ناشناخته باقی مانده به شش کاهش یافت. و این نیاز به حداقل شش چرخش مختلف سکو با نرخ زاویه ای ثابت برای اعمال حداقل مربعات بهینه سازی داشت. نتایج کالیبراسیون ژیروسکوپ با این روش در نشان داده شده استجدول 3 . علاوه بر این، شکل 7 خطاهای سه گانه ژیروسکوپ را با حاشیه خطا کمتر از 0.2 درصد نرخ زاویه ای مرجع نشان می دهد.
3.4. الگوریتم فیوژن چند سنسوری
برای روش محاسبه مرده مبتنی بر گام و سرفصل، دقت شمارش گام تخمینی، طول و عنوان با کیفیت شتاب اندازهگیری شده و نرخ زاویهای تعیین شد. به منظور افزایش کیفیت اندازهگیریها برای حسگرها و کسب اطلاعات از آنها، یک الگوریتم همجوشی چند حسگر با استفاده از یک فیلتر مکمل مرتبه دوم اعمال شد [ 33 ]. این الگوریتم همجوشی چند سنسوری سپس شتاب مدرج، نرخهای زاویهای کالیبرهشده و نگرش تخمینی را که زوایای چرخش و شیب است، به بخش الگوریتم محاسبه مرده خروجی میدهد.
پیش پردازش الگوریتم همجوشی چند حسگر شامل به دست آوردن داده های خام از ماژول حسگر، انجام کالیبراسیون حسگر، فیلتر کردن داده ها و به دست آوردن تخمین نگرش از شتاب سنج بود. فیلتر داده اعمال شده استفاده شده یک فیلتر پایین گذر با فرکانس قطع 5 هرتز بود و بر روی خروجی های سه گانه شتاب سنج اعمال شد. فرکانس قطع انتخاب شده بر اساس فرکانس های حرکات مختلف، بین 0.4 تا 5 هرتز، برای فعالیت روزانه منظم انسان بود [ 34 ، 35]]. خروجی های مستقیم سنسورها شتاب و نرخ زاویه ای جسم مورد نظر است، اما این سیگنال ها برای توصیف حرکت بدن انسان در حین راه رفتن کافی نیستند. به منظور استخراج اطلاعات بیشتر در مورد فعالیت های عابر پیاده، از الگوریتم فیوژن چند حسگر برای استخراج جهت گیری قابل اعتماد ماژول حسگر استفاده شد. جهت گیری اطلاعاتی است که می تواند برای نشان دادن وضعیت فضایی شی مورد نظر هنگام انجام فعالیت های مختلف روزانه مانند پیاده روی، دویدن یا دوچرخه سواری استفاده شود. در این مطالعه، نگرش تخمینی کاربر با ادغام خروجی شتابسنج و ژیروسکوپ با فیلتر مکمل مرتبه دوم برآورد میشود. ایده اصلی فیلتر مکمل این است که زوایای رول و گام به دست آمده از خروجی های ژیروسکوپ را از طریق یک فیلتر بالا گذر ترکیب کند. و آنهایی که از شتاب سنج از طریق یک فیلتر پایین گذر به دست می آیند، برای به دست آوردن نگرش تخمینی، در نتیجه رانش ژیروسکوپ و دینامیک کند و نویز بالای شتاب سنج را جبران می کنند. فرکانس های قطع فیلترهای پایین گذر و بالا گذر اتخاذ شده هر دو روی 0.1 هرتز تنظیم شده بودند. این عدد با داده های آزمایشی تعیین شد و بر اساس فرکانس حرکات مختلف فعالیت روزانه منظم انسان برای تشخیص وضعیت ثابت از فعالیت متحرک بود. بنابراین، نگرش های برآورد شده دارای دقت کوتاه مدت و بلند مدت خواهند بود. 1 هرتز این عدد با داده های آزمایشی تعیین شد و بر اساس فرکانس حرکات مختلف فعالیت روزانه منظم انسان برای تشخیص وضعیت ثابت از فعالیت متحرک بود. بنابراین، نگرش های برآورد شده دارای دقت کوتاه مدت و بلند مدت خواهند بود. 1 هرتز این عدد با داده های آزمایشی تعیین شد و بر اساس فرکانس حرکات مختلف فعالیت روزانه منظم انسان برای تشخیص وضعیت ثابت از فعالیت متحرک بود. بنابراین، نگرش های برآورد شده دارای دقت کوتاه مدت و بلند مدت خواهند بود.
شکل 8زوایای چرخش و گام تخمینی را از روش های مختلف در حین راه رفتن سوژه ارائه می دهد. دادههایی که بهعنوان «acc»، «ژیروسکوپ» و «CF» مشخص میشوند، به ترتیب زوایای چرخش و گام بهدستآمده از روشهای شتابسنج، ژیروسکوپ و فیلتر مکمل هستند. داده ها نشان می دهد که شتاب سنج در حین حرکت دینامیکی بالا از نویز زیاد رنج می برد، ژیروسکوپ از رانش رنج می برد و تنها فیلتر مکمل می تواند در کوتاه مدت و بلند مدت عملکرد خوبی داشته باشد. این شکل همچنین نشان می دهد که زوایای رول و گام تخمینی از روش CF نسبت به دو روش تخمین دیگر قابل اعتمادتر است. رانش زاویه گام بزرگتر از رانش در زاویه رول است. دلیل این موضوع می تواند این باشد که زاویه گام حاوی خطاهای بزرگتری در بایاس و مقدار اولیه است. علاوه بر این،
4. الگوریتم محاسبه مردگان عابر پیاده
PDR پیشنهادی در این مطالعه بر اساس روش محاسبه مرده مبتنی بر مرحله و سرفصل است. یک مکان فعلی از یک مکان قبلی با اضافه کردن جابجایی تخمین زده شده از طول گام و عنوان بدست می آید. بنابراین، دقت شمارش گام، طول و سرفصل تخمین زده شده برای عملکرد PDR بسیار مهم است. در این مطالعه، از آنجایی که اندازهگیری سهگانه مغناطیسسنج تحت تأثیر منابع مغناطیسی طبیعی و مصنوعی در محیط داخلی قرار گرفت، سهگانه مغناطیسسنج برای کمک به تخمین عنوان استفاده نشد. بلوک Step Counting حرکت دوره ای کاربر را در حین حرکت تشخیص می دهد و مراحل شناسایی شده و زمان گام را به بلوک SLE مبتنی بر دانش خروجی می دهد. بلوک SLE مبتنی بر دانش، قدرت و فرکانس گام را با استفاده از تخمین تعداد گام و زمان گام محاسبه میکند. با قدرت و فرکانس تخمینی گام، بلوک SLE مبتنی بر دانش از روش FL برای تخمین طول هر گام کاربر استفاده می کند. عنوان کاربر یا جهتی که با آن روبرو می شود با ادغام نرخ های زاویه ای در بلوک Heading Estimation تخمین زده می شود. بر اساس موقعیت اولیه، مسافت طی شده کاربر و اطلاعات عنوان پیوسته، مکان کاربر در هر زمان می تواند توسط الگوریتم PDR تخمین زده شود.
4.1. گام شماری
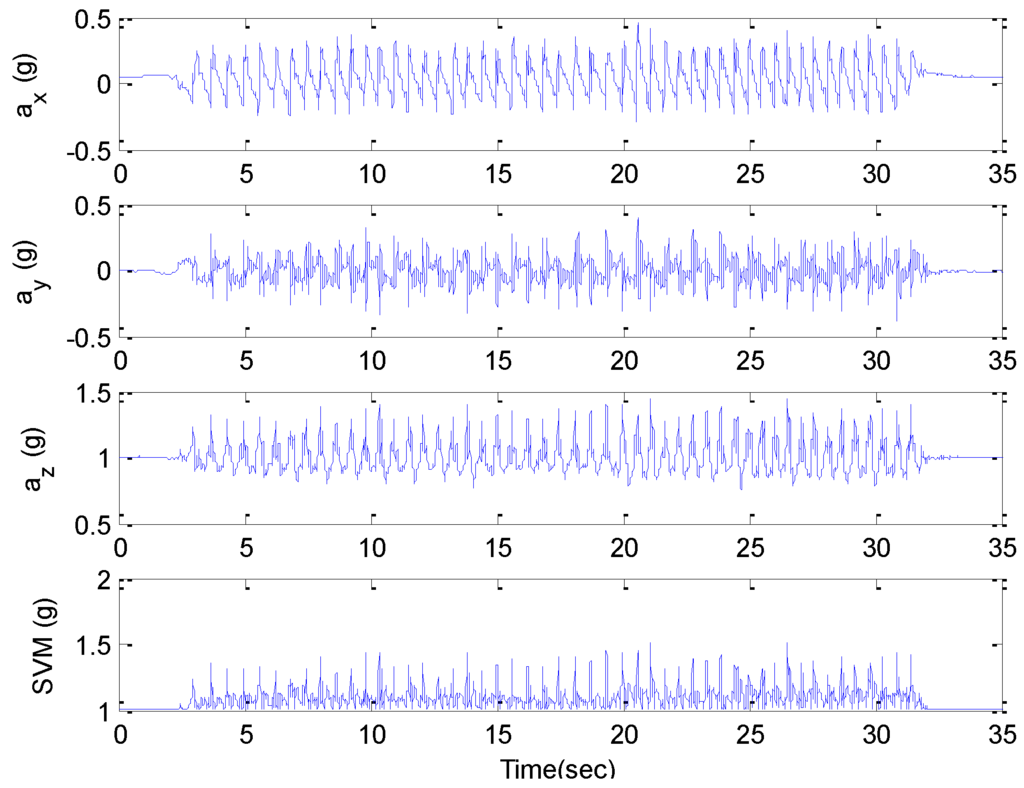
تشخیص گام و شمارش با توجه به دانستن جابجایی یک کاربر اساسی است. شتابسنجها بهطور گسترده برای تشخیص مراحل کاربر استفاده میشوند و روشهای مختلفی برای دستیابی به این امر در بسیاری از مطالعات ارائه شده است، با تشخیص اوج و تشخیص عبور از صفر که به طور گستردهای برای PDRهای نصب شده روی کمر و دستی استفاده میشود [10 ، 16 ، 36 ]]. هدف بلوک گام شماری تشخیص هر مرحله و تشخیص مدت و قدرت آن است. به منظور افزایش دقت و قابلیت اطمینان روش شمارش گام، در این مطالعه از روش تشخیص حالت ایستا برای تشخیص اینکه آیا کاربر در حال حرکت است یا خیر، استفاده شد. اندازه بردار سیگنال (SVM) در هر دوره به عنوان یکی از ویژگی های حرکت کاربر محاسبه می شود. هنگامی که کاربر ساکن است، SVM شناسایی شده تقریباً 1 گرم است. اگر مقدار SVM از 1 گرم منحرف شود و از یک آستانه از پیش انتخاب شده، در این مورد 0.1 گرم، فراتر رود، آنگاه آن کاربر در حال حرکت در نظر گرفته می شود. برای دوره k ، SVM( k ) به عنوان مجذور ریشه مجموع سیگنال شتاب مجذور هر محور تعریف می شود:
جایی که آایکس��، آy��، و آz��شتاب اندازه گیری شده را به ترتیب در محور x ، محور y و محور z از سه شتاب سنج در دوره k نشان دهید.
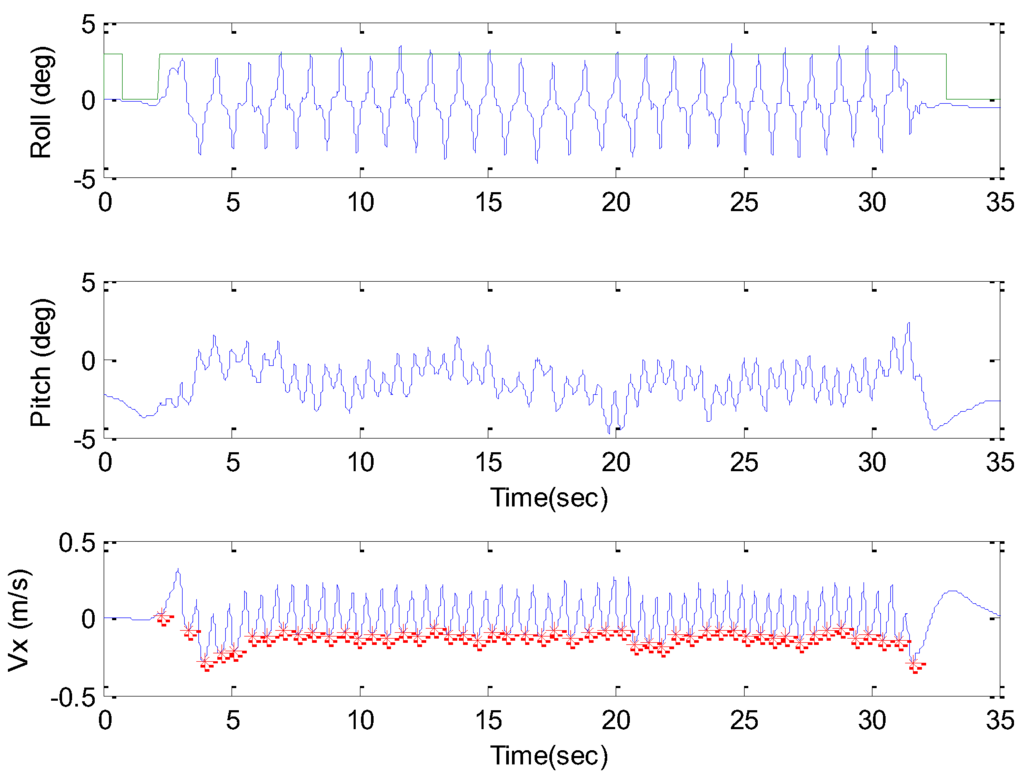
تشخیص اوج و تشخیص تقاطع صفر رایج ترین روش های تشخیص مرحله هستند. با این حال، نتایج برخی از آزمایشهای پیادهروی، همانطور که در شکل 9 نشان داده شده است، نشان میدهد که دادههای شتابسنج خام حاوی نویز و ناهماهنگی قابلتوجهی برای هر مرحله، به ویژه در محورهای y و z هستند . این نشان دهنده این واقعیت است که راه رفتن انسان هنگام برخورد پاها با زمین، نیروی واکنشی ایجاد می کند که از نظر فنی مرحله ضربه پاشنه چرخه راه رفتن است. نویز بالای اطلاعات شتاب، دقت روش های تشخیص گام را بر اساس تشخیص اوج یا تشخیص عبور از صفر کاهش می دهد. همانطور که در شکل 9 نشان داده شده است ، شتاب در x-محور منظم تر و پایدارتر از دو محور دیگر است و شتاب محور x با جابجایی رو به جلو کاربر در هنگام راه رفتن مطابقت دارد. بنابراین، یک روش تشخیص مرحله ای در این مطالعه با استفاده از ویژگی های تناوبی در سرعت محور x ، که نشان دهنده سرعت رو به جلو و عقب است، پیشنهاد شد. به عنوان Vx نشان داده می شود و از شتاب محور x یکپارچه شده است . وقتی یک جفت قله و دره در xسرعت محور تشخیص داده می شود، یک مرحله در بلوک شمارش گام تشخیص داده می شود. فرآیند تشخیص قله ها (حداکثر) و دره ها (حداقل) با تعیین اکسترمای محلی Vx در زمان واقعی انجام می شود. در این مطالعه، دو آستانه برای تعیین اینکه آیا ماکزیمم یا حداقل محلی محاسبه شده است، تعیین شد. یکی تفاوت بین Vx فعلی و اکسترموم نزدیک بود و این مقدار آستانه 0.05 متر بر ثانیه تعیین شد. دیگری تفاوت بین زمان فعلی و زمانی بود که یک اکستروم قبلی تشخیص داده شد و مقدار آن 0.15 ثانیه تعیین شد. بحث این است که این آستانه می تواند از تأثیر نویز در شمارش گام ها جلوگیری کند. تعیین این دو آستانه با توجه به داده های آزمون اندازه گیری شده از افراد مختلف انجام شد. هنگامی که این دو آستانه به طور همزمان به دست آمد، حداکثر یا حداقل محلی تعیین شد. از نظر تئوری، زمان قدم برابر است با زمان دو سیگنال راه رفتن مکرر. در این مطالعه، از دو سیگنال دره پیوسته در منطقه استفاده شدسرعت محور x برای محاسبه زمان گام. شکل 10 زاویه رول، زاویه گام و سرعت محور x را نشان می دهد . خط سبز نقطه چین نمودار بالایی نتایج تشخیص حالت استاتیک را نشان می دهد و مقدار صفر نشان دهنده حالت ایستا است. ستاره های قرمز رنگ پایین نشان دهنده مراحل شناسایی شده است.
4.2. الگوریتم SLE مبتنی بر دانش مبتنی بر منطق فازی
چندین روش تخمین طول گام وجود دارد که برای کاربردهای مختلف در گذشته پیشنهاد شده است [ 21 ، 22 ، 23 ]. مقایسه چندین روش رایج نشان داده است که روش پیشنهادی توسط واینبرگ و همکارانش. بهترین گزینه برای IMU نصب شده روی کمر است [ 16 ، 26 ]. این روش تقریبی از مدل آونگ معکوس توصیف شده توسط Zijlstra و همکاران را اتخاذ می کند. [ 24 ]، اما مدلی است که به اطلاعاتی در مورد طول پای کاربر نیاز ندارد. این رویکرد یک معادله تجربی را اعمال می کند که طول گام را L، از جابجایی عمودی لگن. از داده های به دست آمده از آزمایش های تجربی، معادله را می توان به صورت تقریبی تخمین زد:
جایی که آحداکثر�maxو آدقیقه�minبه ترتیب حداکثر و حداقل شتاب عمودی در طول یک پله هستند. K یک مقدار ثابت است که باید برای موضوعات مختلف تنظیم شود. این معادله تجربی در این مطالعه به منظور مقایسه عملکرد آن با روش پیشنهادی در اینجا اتخاذ شده است. مقادیر ثابت اعمال شده برای هر آزمودنی با استفاده از طول گام های مختلف اندازه گیری شده توسط افراد مورد آزمایش به دست آمد. بنابراین، مقادیر ثابت معادله تجربی اتخاذ شده بر اساس اختلاف بین حداکثر و حداقل شتاب عمودی تغییر خواهد کرد.
قواعد فازی اتخاذ شده در این تحقیق از نوع ممدانی است که روش استنتاج حداکثر دقیقه نیز نامیده می شود و متغیرها دو ورودی و یک خروجی هستند. استراتژی فازی سازی روش مرکز ثقل است [ 37 ]. متغیرهای ورودی FL اتخاذ شده فرکانس و قدرت گام هستند و مقدار خروجی آن طول گام تخمینی است. فرکانس گام از زمان گام به دست می آید و قدرت گام بر اساس جمع تفریق بزرگی سیگنال است که با کم کردن SVM از بزرگی میدان گرانشی محاسبه می شود. فرکانس گام و قدرت گام n به شرح زیر تعیین می شود:
جایی که تیn��زمان مرحله n گام را نشان می دهد و E دوره های شناسایی شده در طول مدت مرحله n ام است.
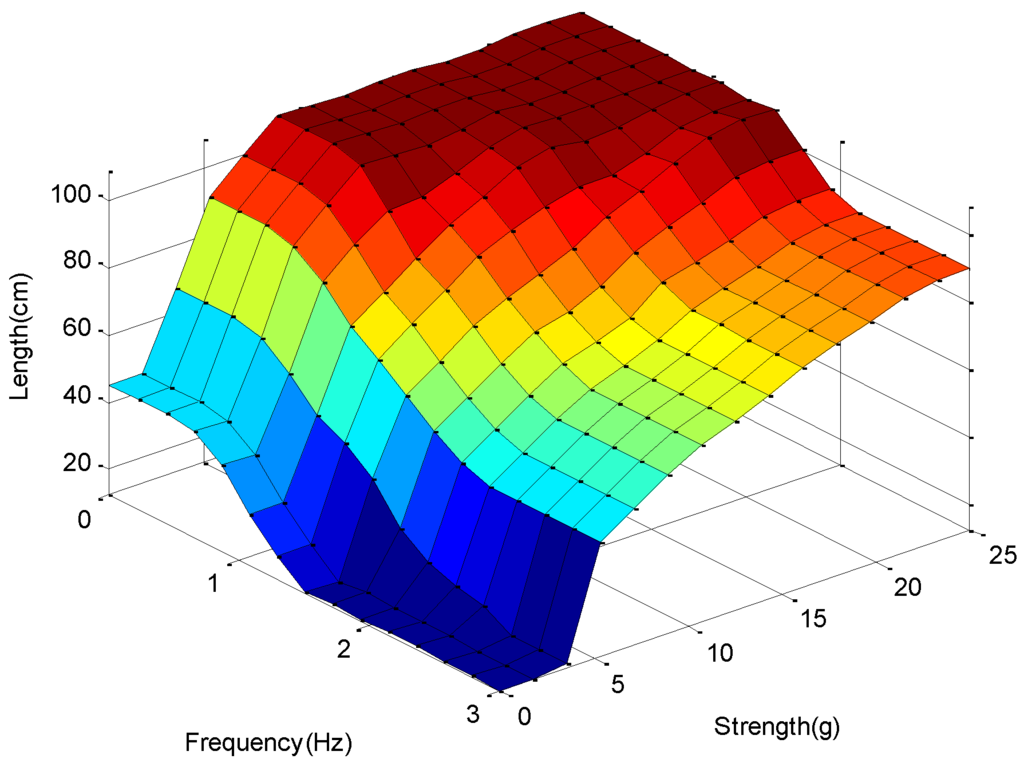
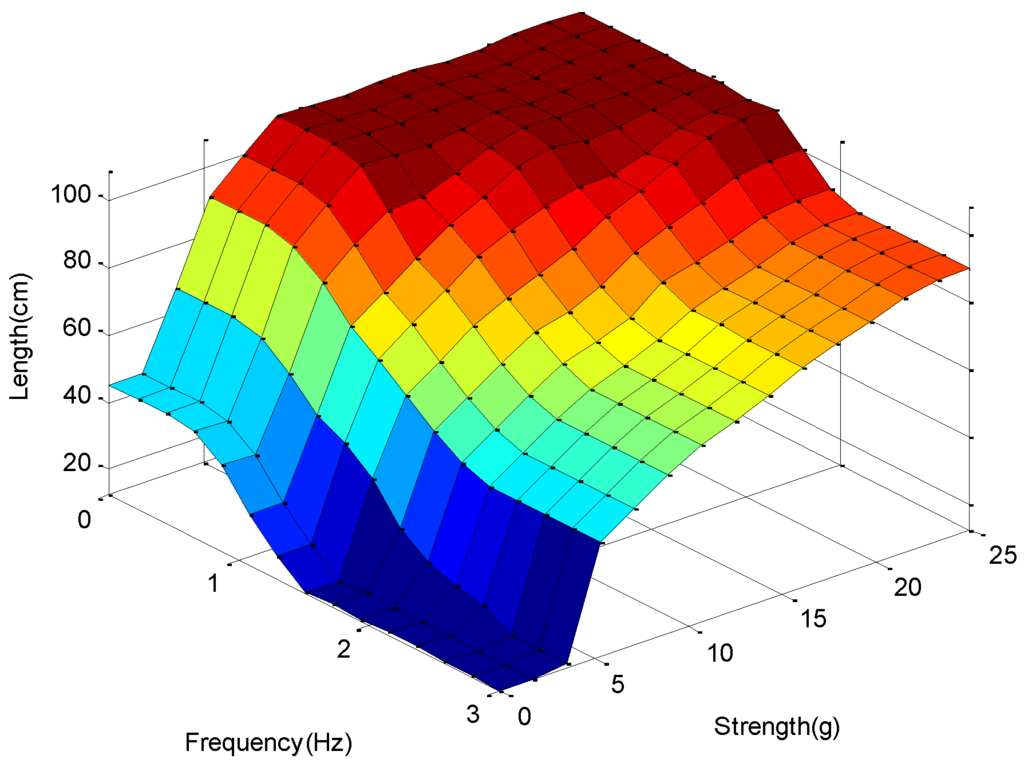
طراحی FL بر اساس نتایج تجزیه و تحلیل متریک مجموعه ای از آزمایش های راه رفتن است. از آزمودنی مورد نظر خواسته شد تا در طول گام های مختلف، 30، 60، و 90 سانتی متر و فرکانس های مختلف، 1، 1.5، 2 و 2.5 هرتز راه برود. طول گام اتخاذ شده از افراد با کشیدن نشانگر بر روی زمین برای هر طول گام داده شده کنترل شد. پس از تجزیه و تحلیل دادههای حاصل، توابع عضویت ورودیهای فرکانس و قدرت که اتخاذ شدند به ترتیب پنج و هفت تابع مثلثی هستند. محدوده توابع عضویت برای ورودی فرکانس از 0.6 تا 3 هرتز و برای ورودی قدرت از 2 تا 25 گرم است. توابع عضویت پذیرفته شده خروجی طول گام تخمینی هفت تابع مثلثی و دامنه آن از 20 تا 105 سانتی متر است. بنابراین 35 قانون در FL اعمال شده وجود دارد،شکل 11 . با توجه به تفاوت قد، وزن و طول پا بین هر موضوع، طراحی FL، از جمله توابع عضویت و جدول قوانین، در بین موضوعات مختلف متفاوت است. برای هر موضوع، طراحی FL باید با توجه به داده های آزمون تنظیم شود.
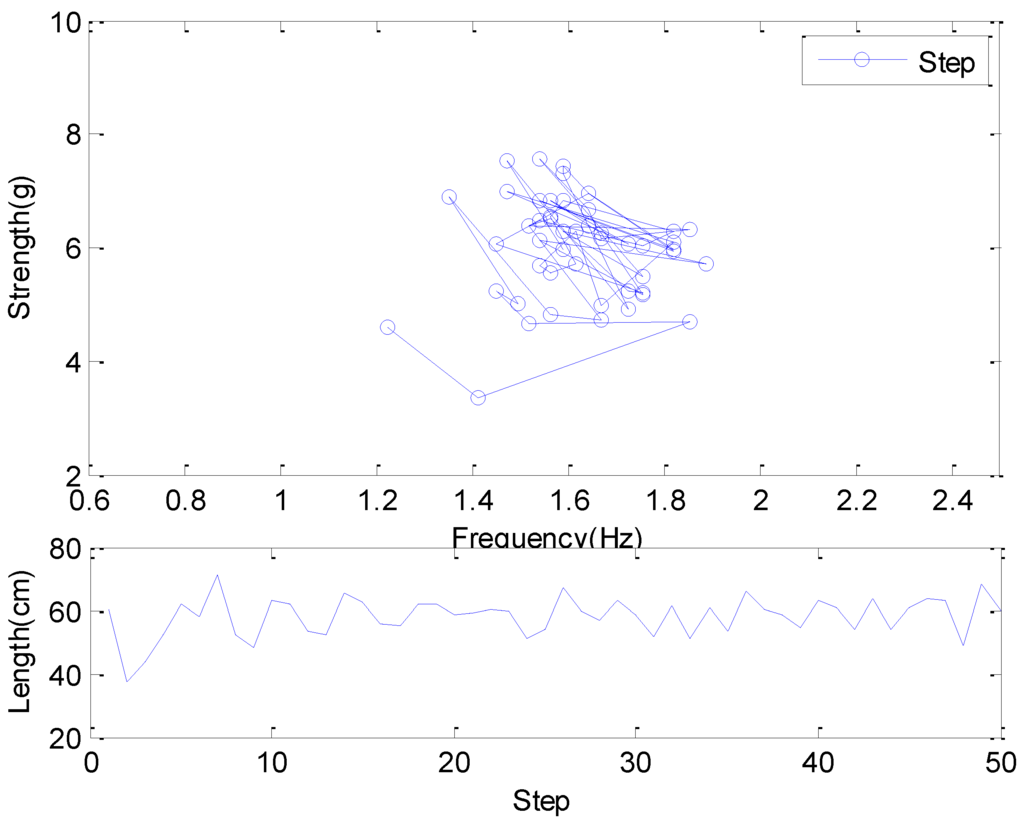
نتایج آزمون FL طراحی شده برای یک موضوع هدف انتخاب شده در شکل 12 نشان داده شده است . آزمودنی 50 قدم را با سرعت بدون محدودیت راه رفت و طول گام مورد نظر 61 سانتی متر بود. حقیقت زمینی مسافت طی شده از طریق یک برد یاب لیزری اندازه گیری شد. نتایج نشان می دهد که تعداد گام های شناسایی شده با تعداد واقعی مطابقت دارد و طول گام های تخمینی نزدیک به طول مورد نظر است. نتایج همچنین نشان می دهد که چند قدم اول خطاهای بیشتری نسبت به بقیه دارند. دلیل احتمالی این امر این است که سوژه از حالت ایستاده شروع به راه رفتن کرد و در نتیجه چند قدم اول ثابت نبود. میانگین خطای طول پله های تخمینی 1.36 سانتی متر و انحراف معیار 4.27 سانتی متر است.
4.3. برآورد سرفصل
در بلوک Heading Estimation شکل 1 ، عنوان تخمینی ماژول حسگر از ادغام نرخ زاویه ای کالیبره شده اندازه گیری شده از ژیروسکوپ به دست آمده است. به منظور بهبود دقت برآورد عنوان، قاب مختصات نرخ های زاویه ای کالیبره شده از بدنه حسگر به فریم های افقی محلی با استفاده از زوایای نگرش تخمین زده شده از الگوریتم همجوشی چند حسگر منتقل شد. عنوان برآورد شده توسط رابطه (8) تعیین می شود:
جایی که ψ˙�˙نرخ زاویه ای زاویه سمت در یک قاب افقی محلی است و ψ˙ب�˙�تعصب است ψ˙�˙.
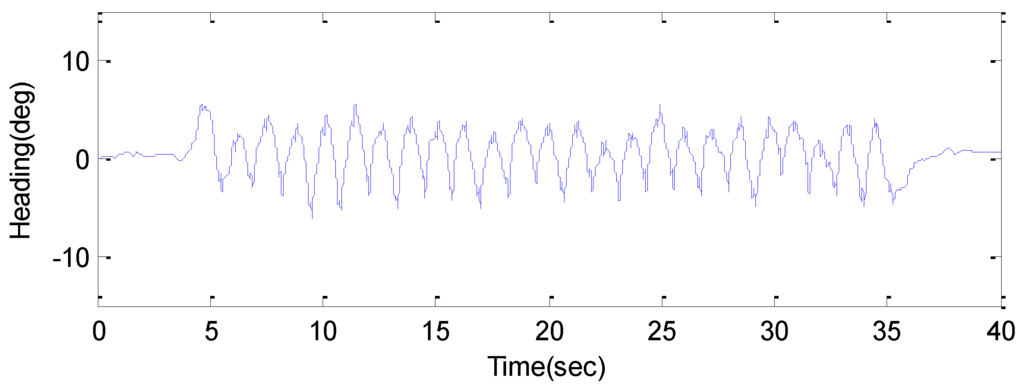
با توجه به مشکل رانش ژیروسکوپ، تعیین سوگیری های سه گانه ژیروسکوپ حیاتی بود. تعیین سوگیری ها با استفاده از شرایط استاتیک ماژول حسگر قبل از شروع راه رفتن کاربر انجام شد. مقداردهی اولیه زوایای عنوان تخمین زده شده برای میانگین زوایای عنوان چند قدم اول زمانی بود که کاربر مستقیم راه می رود. شکل 13نتایج تخمین عنوان را ارائه می دهد و نشان می دهد که راه رفتن تا حدی از حرکت نوسانی بدن در زمانی که سوژه در یک خط مستقیم راه می رود تشکیل شده است. پس از 50 قدم راه رفتن، سوژه به همان جهتی است که زمانی که شروع به راه رفتن کرده بود. خطای عنوان تجمعی این تست در عرض 1 درجه پس از راه رفتن آزمودنی به مدت 40 ثانیه است. نتایج دقت کوتاه مدت برآورد عنوان را نشان می دهد. از نظر دقت طولانی مدت، روش تطبیق نقشه را می توان برای تصحیح خطاهای عنوان [ 9 ، 10 ] اتخاذ کرد. راه دیگر برای کاهش خطای انباشته شدن عنوان، استفاده از ژیروسکوپ های دقیق تر است که می توانند ژیروسکوپ های فیبر نوری با کارایی بالا باشند. لازم به ذکر است که در شکل 13، حرکت نوسانی در سر ناشی از حرکت لگنی است که افراد در حال راه رفتن بودند [ 38 ].
5. نتایج آزمایش و بحث
دو نوع آزمایش در این مطالعه برای تأیید عملکرد و دقت سیستم PDR پیشنهادی انجام شد. یکی آزمایش تخمین طول گام و دیگری آزمایش ناوبری عابر پیاده بود. آزمایش تخمین گام با درخواست از آزمودنی ها برای راه رفتن در طول گام های مشخص انجام شد. هدف از این آزمایش اول بررسی قابلیت اطمینان و دقت روش SLE پیشنهادی بر اساس الگوریتمهای همجوشی چند حسگر و FL بود. آزمایش دوم، آزمایش ناوبری عابر پیاده، برای بررسی عملکرد بلند مدت SLE پیشنهادی برای یک سیستم PDR انجام شد. در آزمایش طول گام، ده آزمودنی (6 مرد و 4 زن) شرکت کردند. سن آنها بین 21 تا 40 سال (میانگین: 28.0 سال)، توده بدن آنها بین 48 تا 80 کیلوگرم (میانگین: 61.7 کیلوگرم) بود. و ارتفاع آنها از 157 تا 177 سانتی متر (میانگین: 166.5 سانتی متر) متغیر بود. یکی از آزمودنیهای مذکر بهعنوان آزمودنی مورد نظر برای تمام آزمایشها انتخاب شد و FL بر اساس دادههای آزمایشی این فرد کالیبره شد. قد و وزن بدن سوژه مورد نظر به ترتیب 170 سانتی متر و 65 کیلوگرم بود.
5.1. آزمایش تخمین طول مرحله و نتایج
به منظور بررسی پایایی و دقت روشهای پیشنهادی، آزمایش تخمین گام با راه رفتن آزمودنیها در یک خط مستقیم انجام شد. از آزمودنی مورد نظر خواسته شد تا 50 قدم در سه زمان مختلف راه برود و هر بار طول گام های مختلف 30.5، 61 و 91.5 سانتی متر باشد. حقیقت زمینی مسافت طی شده از طریق یک برد یاب لیزری اندازه گیری شد. الگوریتم های ترکیب چند حسگر و SLE بر روی ماژول حسگر نصب شدند و در زمان واقعی اجرا شدند. سوژه مورد نظر برای هر گام متفاوت سه بار راه رفت.
جدول 4 نتایج تخمین طول گام را برای سوژه مورد نظر نشان می دهد. نتایج شمارش گام نشان می دهد که از 450 مرحله تنها دو مرحله از دست رفته است و دقت روش شمارش گام پیشنهادی 99.5 درصد است. در مورد تخمین طول پله، حداکثر میانگین خطای روش FL در مقایسه با طول پله های مورد نیاز 1.73 سانتی متر است که در آزمون 7 رخ داده است. انحراف استاندارد طول گام های برآورد شده از 2.18 تا 4.45 سانتی متر است. 4th-r تخمین طول گام معادله تجربی پیشنهاد شده توسط Weinberg و همکاران را نشان می دهد . ارزش Kبا تمرین با طول گام های مختلف 30، 60 و 90 سانتی متر تعیین می شود. حداکثر میانگین خطای معادله تجربی در مقایسه با طول گام های مورد نیاز 3.87 سانتی متر است که در آزمون 9 رخ داد. طول تخمین زده شده معادله تجربی در آزمون 2 و 7 بهتر از روش FL است، اما کل خطاهای فاصله روش FL کمتر از 1.4 درصد از کل فاصله مرجع است که بهتر از معادله تجربی است.
از آنجایی که FL اتخاذ شده در این مطالعه برای سوژه مورد نظر سفارشی شده بود، 9 موضوع دیگر برای بررسی قابلیت استفاده از FL با توجه به موضوعات غیرهدف وارد شدند. ستون اول جدول 5 تعداد موضوع، قد و توده بدن افراد را نشان می دهد. چهار آزمودنی آخر، آزمودنی های 7 تا 10، زن هستند. جدول 5نتایج تخمین طول گام را با استفاده از معادله FL و تجربی برای همه افراد غیر هدف نشان می دهد. نتایج شمارش گامها نشان میدهد که از 900 مرحله تنها یک مرحله از دست رفته است و دقت روش شمارش گامهای پیشنهادی 99.89 درصد است. نتایج همچنین نشان میدهد که طول گامهای تخمینی سوژه 2 نزدیک به طول گام مورد نظر است و هر دو قد و جرم بدن آزمودنیها بر طول تخمینی گام بر اساس روش پیشنهادی تأثیر دارند. حداکثر خطای فاصله تخمینی اندازه گیری شده از FL حدود 0.6٪ تا 12.3٪ و کل خطای فاصله تخمینی حدود 4.3٪ بود. خطای مکان افراد غیر هدف از 0.27 تا 2.75 متر بود. این نتایج نشان می دهد که خطاهای مکان کمی بزرگتر از خطاهای انباشته فاصله راه رفتن در اکثر آزمایشات پس از معرفی خطاهای عنوان بود. علاوه بر این، خطاهای افراد غیرهدف بزرگتر از خطای سوژه مورد نظر بود، زیرا FL بر اساس داده های جمع آوری شده از سوژه مورد نظر آموزش داده شده بود. علاوه بر این، طول گامهای تخمینی سوژههای ماده و سبکتر از بقیه بزرگتر بود. در مقایسه با معادله تجربی، FL برای افراد غیر هدف نیز به جز آزمون 13، 15 و 16 عملکرد بهتری داشت. طول گام تخمین زده شده برای سوژه های ماده و سبک تر از بقیه بزرگتر بود. در مقایسه با معادله تجربی، FL برای افراد غیر هدف نیز به جز آزمون 13، 15 و 16 عملکرد بهتری داشت. طول گام تخمین زده شده برای سوژه های ماده و سبک تر از بقیه بزرگتر بود. در مقایسه با معادله تجربی، FL برای افراد غیر هدف نیز به جز آزمون 13، 15 و 16 عملکرد بهتری داشت.
5.2. آزمایش ناوبری عابر پیاده و نتایج
هدف از این آزمایش بررسی عملکرد بلندمدت سیستم PDR پیشنهادی اعمال شده بر روی موضوع مورد نظر بود. دو دوره برای نشان دادن دقت و قابلیت اطمینان سیستم پیشنهادی انتخاب شد. یکی در محیط داخلی و دیگری در محیط بیرونی بود. در یک محیط سرپوشیده، آزمودنیها دو بار در اطراف یک مسیر انتخابی با مسافتی حدود 116.51 متر پیادهروی کردند که از طریق یک فاصله یاب لیزری اندازهگیری شد. جدول 6نتایج حاصل از راه رفتن افراد در این دوره را ارائه می دهد. دو آزمون اول نتایج زمانی هستند که از آزمودنی 2 خواسته شد تا با طول گام ثابت تقریباً 60 سانتی متر راه برود، و دو آزمون دیگر نتایج زمانی هستند که آزمودنی 1 با طول و سرعت گامی که خود انتخاب کرده بود راه رفت. این نتایج نشان می دهد که تنها دو مرحله از 731 مورد از دست رفته است و دقت روش شمارش گام پیشنهادی 99.7٪ است. حداکثر خطای مسافت تخمین زده شده 1.39 متر بود که با وجود راه رفتن آزمودنی ها در طول گام ها و سرعت های مختلف، کمتر از 1.2 درصد فاصله مرجع است. کل خطای فاصله تخمینی حدود 0.17٪ بود. عبارت SE نشان دهنده خطای فاصله بین نقطه شروع و پایان دوره است که به آن خطای بسته شدن حلقه می گویند. شکل 14نتایج آزمایش را ارائه می دهد. آزمودنی ها دو بار از نقطه شروع تا پایان دوره را پیاده روی کردند. خطای فاصله نقطه شروع و پایان کمتر از 2.22 متر بود.
در محیط بیرونی، سوژه مورد نظر در مسیری در محوطه دانشگاه پوشیده از سنگفرش آجری به مدت شش دور راه رفت، که مسافت کل هر دور حدود 385.2 متر بود که با استفاده از نقشه های گوگل اندازه گیری شد، همانطور که در شکل 15 نشان داده شده است . بایاس های ژیروسکوپ با جمع آوری مقادیر زمانی که ماژول حسگر قبل از هر آزمایش ایستا بود، مقداردهی اولیه شد. سوژه حدود 5 دقیقه طول کشید تا هر دور کامل شود. انتظار می رود برای مسیر طراحی شده، سوژه طول گام و سرعت را به طور طبیعی تعیین کند. نتایج نشان می دهد که خطاهای فاصله برآورد شده از 0.19 تا 6.85 متر و خطاهای بسته شدن حلقه از 1.49 تا 10.15 متر بوده است، همانطور که در جدول 7 نشان داده شده است.. حداکثر خطای عنوان رخ داده در آزمون 4 4.27 درجه بود. علاوه بر این، نتایج شمارش گام نشان می دهد که از 3289 مرحله تنها دو مرحله از دست رفته است و دقت روش شمارش گام پیشنهادی 99.9 درصد بوده است. حداکثر خطای مسافت تخمین زده شده 6.85 متر بود که با وجود راه رفتن آزمودنی در طول گام ها و سرعت های مختلف روی روسازی آجری، کمتر از 1.78 درصد فاصله مرجع است. این نتایج صحت و قابلیت اطمینان روشهای پیشنهادی و الگوریتم محاسبه مرده اعمال شده برای موضوع مورد نظر را تأیید میکند.
5.3. نتایج و بحث
نتایج آزمایشها با استفاده از الگوریتمهای تخمین طول گام چند سنسور و FL، دقت و قابلیت اطمینان بالای روش SLE را برای سیستم PDR توسعهیافته در این مطالعه نشان میدهد. نشان داده شده است که SLE پیشنهادی بر اساس FL دارای قابلیت تخمین طیف وسیعی از طول گام برای یک سوژه مورد نظر است. نتایج نشان می دهد که روش SLE پیشنهادی عملکرد بهتری نسبت به معادله تجربی ارائه شده توسط واینبرگ و همکاران دارد. [ 26 ] با مقدار ثابت متغیر Kتمرین با سه طول پله های مختلف 30، 60 و 90 سانتی متر. علاوه بر این، برای افراد غیر هدف، دقت تخمین روش FL بهتر از معادله تجربی بود. به طور خاص، مشاهده شده است که وقتی قد و جرم بدن یک سوژه غیر هدف با سوژه مورد نظر یکسان است، دقت روش FL برای آن دو فرد مشابه است. نتایج نشان میدهد که قد و توده بدن آزمودنیها هر دو بر طول تخمینی گام بر اساس FL تأثیر داشتند. حداکثر خطای فاصله تخمینی اندازه گیری شده از FL حدود 0.6٪ تا 12.3٪ و کل خطای فاصله تخمینی حدود 4.3٪ بود. بنابراین حداکثر خطای برآورد شده در این مطالعه بهتر از آنچه در مطالعه در [ 16] گزارش شده است]. از نتایج آزمایش این مطالعه، مشخص شد که خطاهای افراد غیرهدف بزرگتر از خطای سوژه مورد نظر بود، زیرا FL بر اساس داده های اندازه گیری شده از سوژه مورد نظر آموزش داده شده بود. این نقطه ضعف روش پیشنهادی SLE را نشان می دهد که فقط برای سوژه مورد نظر یا سوژه هایی با قد و توده بدنی مشابه سوژه مورد نظر دقت بالاتری دارد.
نتایج آزمایش ناوبری عابر پیاده نشان می دهد که روش پیشنهادی از دقت قابل قبولی برخوردار بوده است. در محیط داخلی، حداکثر خطای مسافت مسافت 1.2 درصد از 116.51 متر و خطاهای بسته شدن حلقه کمتر از 2.2 متر بود. با این حال، با توجه به مشکل رانش ژیروسکوپ، نتایج دوره اول نشان می دهد که خطاهای فاصله بین نقطه شروع و پایان از آزمون 1 تا 4 بزرگتر شده است، همانطور که در جدول 6 مشاهده می شود .. در محیط بیرونی، مدت زمان تست هر دور حدود 5 دقیقه بود. حداکثر خطای مسافت مسافت پیاده روی 1.78% از 385.2 متر و خطاهای بسته شدن حلقه کمتر از 5.8 متر بود. با توجه به مشکل رانش سه گانه ژیروسکوپ، که تأثیر قابل توجهی بر تخمین عنوان دارد، یک فرآیند دقیق برای تعیین سوگیری های سه گانه ژیروسکوپ انجام شد. طراحی این فرآیند بر اساس نتایج تجربی همانطور که در شکل 16 نشان داده شده است . در این آزمایش سه گانه ژیروسکوپ به مدت 3 ساعت ثابت نگه داشته شد. پس از 25 دقیقه، خروجی ها به خصوص برای محور z ثابت شدند . بنابراین، آزمون های شکل 15پس از ثابت ماندن خروجی های ژیروسکوپ انجام شد. سپس، سوگیری های سه گانه ژیروسکوپ در ابتدای هر آزمایش زمانی که ماژول حسگر ایستا بود، با دقت به دست آمد. با این فرآیند، حداکثر خطای عنوان در آزمون 4 دوره دوم رخ داد و 4.27 درجه بود.
روش کالیبراسیون اتخاذ شده در این مطالعه به راحتی قادر به جبران خطاهای ثابت تصادفی بود، اما خطاهای فرآیند تصادفی مرتبط با زمان، مانند خطای تصادفی و اثرات دما [20، 39] ، حل نشدند . راه های ممکن زیادی برای حل مشکل رانش ژیروسکوپ وجود دارد، مانند استفاده از روش های پیچیده جبران-کنترل برای جبران خطاهای حسگر برای یکی [40]، یا اتخاذ الگوریتم تطبیق نقشه با سیستم های ناوبری عابر پیاده برای دیگری. [ 9 ، 10]. برای محیطهای داخلی، موقعیتیابی مبتنی بر چراغ فرکانس رادیویی، مانند Wi-Fi یا بلوتوث، راهحل خوبی برای غلبه بر مشکل رانش زمانی است که کاربر مسافت طولانی را طی میکند. محلیسازی Wi-Fi با کمک حرکت، که حسگرهای اثر انگشت و اینرسی وایفای را با هم ترکیب میکند، در [ 41 ] مورد مطالعه و بحث قرار گرفته است. به منظور افزایش دقت و قابلیت اطمینان درازمدت، زیرساختها برای یک سیستم PDR مورد نیاز است. علاوه بر این، با توجه به رشد خطای محاسبه مرده، سطوح مختلفی از نظارت یکپارچگی و ارزیابی قابلیت اطمینان برای محدود کردن خطای انباشته برای برنامههای طولانی مدت یا محیطهای پیچیده مورد نیاز است [42 ] .
6. نتیجه گیری
یک روش SLE دقیق و قابل استفاده برای سیستم PDR با ویژگیهای طیف وسیعی از طول گام، یک سیستم مستقل و محاسبات بلادرنگ، بر اساس الگوریتمهای همجوشی چند حسگر و FL، در این مطالعه پیشنهاد شده است. . به منظور دستیابی به یک قابلیت مستقل، یک ماژول حسگر اینرسی قابل حمل و پوشیدنی با استفاده از سنسورهای اینرسی ارزان قیمت، ژیروسکوپ و شتابسنج توسعه داده شد و بر اساس MEMS بود. از آنجایی که سنسورهای ارزان قیمت MEMS از خطاهای مختلفی رنج می برند، خطاهای حسگر این ماژول با یک روش کالیبراسیون سنسور برای بهبود دقت سنسورهای اینرسی کالیبره شدند.
برای افزایش قابلیت اطمینان و پایداری سیستم PDR، ماژول سنسور انتخاب شده در این مطالعه بر روی کمر نصب شده بود. به منظور استخراج اطلاعات بیشتر در مورد فعالیت های عابر پیاده، یک الگوریتم فیوژن چند سنسوری با استفاده از یک فیلتر مکمل مرتبه دوم برای استخراج جهت قابل اعتماد ماژول حسگر استفاده شد. برای دستیابی به شمارش دقیق گام و محاسبه زمان گام، یک روش تشخیص گام اتخاذ شد که از سرعت در محور x استفاده میکرد که از شتاب در امتداد x به دست میآمد.-محور. این نتایج دقت روش شمارش گام ها را 99.5 درصد برای همه آزمون ها نشان می دهد. روش SLE با دامنه وسیع برای سیستم PDR با استفاده از روش FL انجام شد. متغیرهای ورودی FL اتخاذ شده، قدرت و فرکانس گام بودند و مقدار خروجی طول گام تخمین زده شد. طراحی FL بر اساس داده های به دست آمده از آزمایش های راه رفتن سوژه مورد نظر بود. نتایج SLE پیشنهادی برای سوژه مورد نظر که در طول گامهای مختلف راه میرفت، خطاهای مسافتی را نشان داد که در محدوده 1.2٪ از 116.51 متر در محیط داخلی، حتی برای سوژه غیرهدف با قد و توده بدنی یکسان، و در 1.78٪ از 385.2 متر در محیط بیرون بودند. نتایج آزمایش نشان میدهد که SLE پیشنهادی عملکرد ناوبری خوبی داشت زمانی که کاربر در یک محیط داخلی راه میرفت. روش SLE و روش کالیبراسیون حسگر را می توان برای دستگاه های پوشیدنی نصب شده روی کمر با سنسورهای کم هزینه برای بهبود PDR و راه حل های تخمین نگرش اعمال کرد. از نتایج آزمایش، روش پیشنهادی SLE و طرح PDR توانایی پیادهسازی بر روی دستگاههای پوشیدنی کمری را در زمان واقعی نشان میدهند و برای محیطهای داخلی و خارجی در نظر گرفته شده در این مطالعه بدون کمک اطلاعات نقشه یا پیشدستی مناسب هستند. – زیرساخت های نصب شده







بدون نظر