

خلاصه
مدیریت کارآمد اطلاعات و کشف دقیق حسگرهای ناهمگن در وب حسگر جغرافیایی (GSW) یک چالش بزرگ است. مدیریت هوشمند حسگر به یک سرویس رجیستری برای ذخیره و پردازش کارآمد اطلاعات حسگر نیاز دارد. در این مقاله، ما یک هستیشناسی فراداده حسگر (SMO) را برای دستیابی به یک توصیف معنایی یکپارچه برای حسگرهای ناهمگن پیشنهاد میکنیم که برای بیان معنایی حسگر استفاده میشود. از طریق نقشه برداری بین مدل اطلاعات رجیستری حسگر و SMO، فراداده حسگر می تواند با اطلاعات معنایی برای رجیستری ذخیره شود. چارچوب یک سرویس ثبت معنایی حسگر (SSRS) با موفقیت برای ثبت و کشف حسگرهای ناهمگن اجرا شده است.
کلید واژه ها:
رجیستری معنایی سنسور ; مدیریت حسگر ناهمگن ; قابلیت همکاری حسگر ؛ کشف حسگر
1. معرفی
وب حسگر جغرافیایی شامل تعداد زیادی حسگر ناهمگن است که به اینترنت متصل هستند [ 1 ، 2 ]. به عنوان مثال، تقریباً 10000 ایستگاه هواشناسی، 1000 ایستگاه هیدرولوژیکی و 137 حسگر ماهواره ای رودخانه یانگ تسه را نظارت می کنند، بنابراین اطلاعات هیدرولوژیکی قابل توجهی برای اندازه گیری سطح آب، دما و سایر شرایط ارائه می دهند. حسگرهای مرتبط متعددی وجود دارد [ 3 ، 4 ]. این حسگرها ناهمگن هستند و انواع مختلفی از فرمت ها را تشکیل می دهند. در این مقاله، ما یک روش رجیستری معنایی را پیشنهاد میکنیم و سرویس رجیستری را برای مدیریت این حسگرها پیادهسازی میکنیم.
خدمات رجیستری نماینده، سرویس کاتالوگ برای وب (CSW) [ 5 ] است که دارای مدلهای اطلاعات رجیستری خاص مانند مدل اطلاعات رجیستری ebXML (ebRIM) [ 6 ] است. تحقیقات قبلی [ 7 ] از CSW برای ثبت حسگرها و الگوریتم ها استفاده کرده است. در سرویس ثبت سنسور موجود، اصطلاحات یا مفاهیم یکسان در حسگرهای مختلف توضیحات متفاوتی دارند. بنابراین، مترادف های شرح داده شده در SensorML [ 8 ] را نمی توان در پرس و جو از سرویس ثبت حسگر، که منجر به تضاد معنایی می شود، شناسایی کرد. در نتیجه، این سرویس نتوانست دقت و فراخوانی را بهبود بخشد.
بهبود معنایی فراداده حسگر به حل این مشکل کمک می کند. مفهوم معناشناسی به دلیل امکان سنجی آن برای پردازش هوشمند اطلاعات و عملیات متقابل، محققان بسیاری را به خود جذب کرده است. معناشناسی نقش مهمی در وب حسگر ایفا می کند [ 9 ، 10 ، 11 ، 12 ]. یک سرویس ثبت حسگر که اطلاعات معنایی را اضافه می کند برای بهبود دقت پرس و جو مفید خواهد بود. بستر بهتری برای مدیریت اطلاعات حسگر فراهم می کند. برخی از خدمات موجود ثبت و کشف معنایی [ 13 ، 14 ، 15 ، 16 ] را ارائه می دهند که به طور کلی به دو صورت اجرا می شود.
- ●
-
ادغام معناشناسی در یک مدل اطلاعات رجیستری (مانند ebRIM) با استفاده از سه روش مختلف: (الف) نگاشت از عناصر زبان هستی شناسی وب (OWL) به عناصر ebRIM با استفاده از اسناد تبدیل زبان صفحه سبک توسعه پذیر (XSLT)، مانند مورد GeoNetwork (GN) )-ebRIM [ 17 ]; (ب) افزودن کلاسها، طرحهای طبقهبندی، انجمنها و شکافهای جدید با اطلاعات معنایی برای گسترش ebRIM، مانند مورد دانشگاه جورج میسون (GMU)-CSW [16 ] . و (ج) جداسازی مفهوم هستی شناسی و روابط برای گسترش ebRIM [ 18 ].
- ●
-
افزودن اطلاعات معنایی به یک کاتالوگ با استفاده از دو روش مختلف. یکی گسترش واسط کاتالوگ برای پشتیبانی مستقیم از پرس و جوی معنایی تقویت شده است [ 19 ، 20 ]. دیگری ایجاد میان افزار معنایی برای یک سرویس فهرست [ 21 ] است که رابط های سرویس را تغییر نمی دهد [ 22 ، 23 ، 24 ]. برای مثال، رجیستری قابل مشاهده حسگر (SOR) [ 25 ] باید با یک سرویس کشف حسگر (به عنوان مثال، CSW) ارتباط برقرار کند تا به پیشرفت های کشف حسگر دست یابد.
به طور خلاصه، چندین محدودیت برای روش های فعلی وجود دارد: (الف) عدم وجود پرس و جو مترادف. ب) استفاده از روش ثبت معنایی غیرمستقیم. (ج) پشتیبانی از یک نوع سنسور، به عنوان مثال، حسگرهای درجا . و (د) استفاده از یک مدل غیر استاندارد، افزایش دشواری استفاده مجدد. علاوه بر این، این سرویس ها توصیف نحوی از مدل های اطلاعات رجیستری را اتخاذ می کنند که فاقد پشتیبانی استنتاج در کشف حسگر است.
برای حل این مسائل، این مقاله یک روش ثبت حسگر معنایی جدید با استفاده از هستیشناسی فراداده حسگر (SMO) پیشنهاد میکند که میتواند در کاتالوگ OGC-CSW (کنسرسیوم فضایی باز-سرویس کاتالوگ-وب) گنجانده شود تا کشف معنایی را فعال کند. بقیه این مقاله به صورت زیر سازماندهی شده است: بخش 2 SMO، نگاشت پیشنهادی از ebRIM به SMO برای ذخیره ابرداده حسگر و نمونه هایی از SMO را معرفی می کند. بخش 3 اجرای سرویس ثبت معنایی پیشنهادی و نتایج را شرح می دهد. در بخش 4، نتایج مقایسه بین روش ثبت موجود و ثبت معنایی و همچنین مقایسه با سایر ثبت های معنایی مورد بحث قرار گرفته است. در نهایت، به نتیجه گیری و کارهای آتی پرداخته می شود.
2. روش هایی برای فعال کردن رجیستری معنایی حسگر
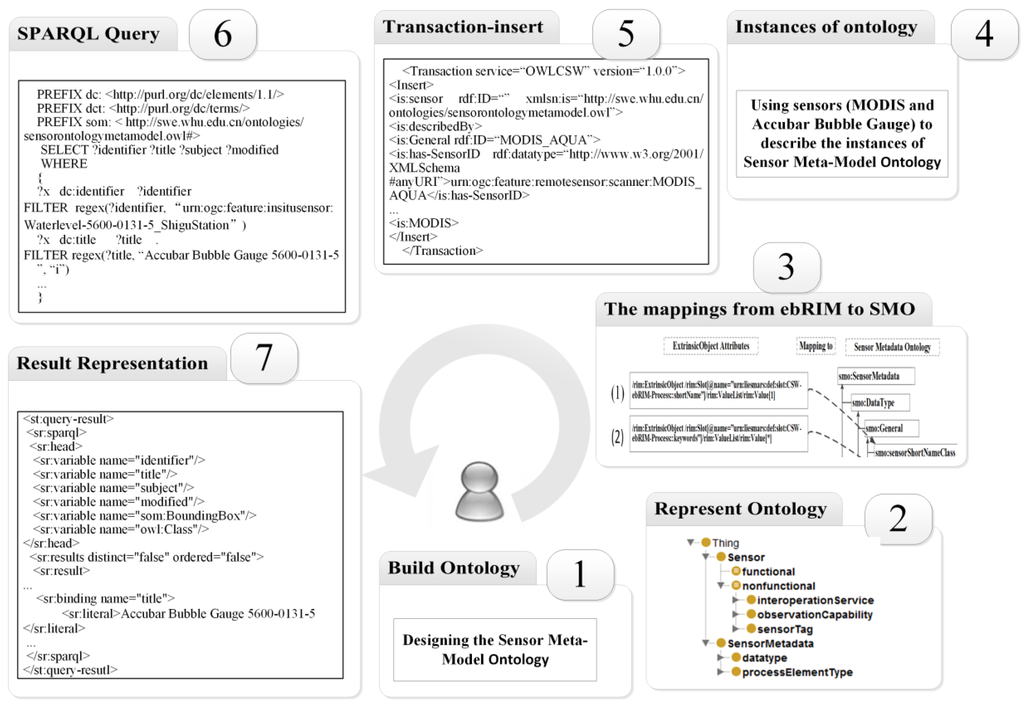
جریان رجیستری معنایی حسگر در شکل 1 نشان داده شده است که عمدتاً از سه مرحله تشکیل شده است:
-
مدل (مرحله 1-2): ساخت یک هستی شناسی فراداده حسگر (SMO).
-
داده (مرحله 3-4): تهیه نقشه برای ذخیره ابرداده حسگر در هستی شناسی برای به دست آوردن داده ها از سرویس رجیستری.
-
آزمایش (مرحله 5-7): اجرای سرویس ثبت معنایی حسگر (SSRS).
2.1. هستی شناسی مدل برای ثبت معنایی
برای نمایش فراداده حسگر، SMO به ویژگی های زیر نیاز دارد:
- ●
-
الگوی هستی شناسی یک حسگر را از نظر اطلاعات، نوع داده و نوع عنصر فرآیندی که می گیرد، توصیف می کند.
- ●
-
محتوای هستی شناسی شامل مفاهیم و ارتباطات فراداده حسگر از توصیف مدل حسگر است. علاوه بر این، معانی، ویژگیها و روابط منابع حسگر را به تصویر میکشد.
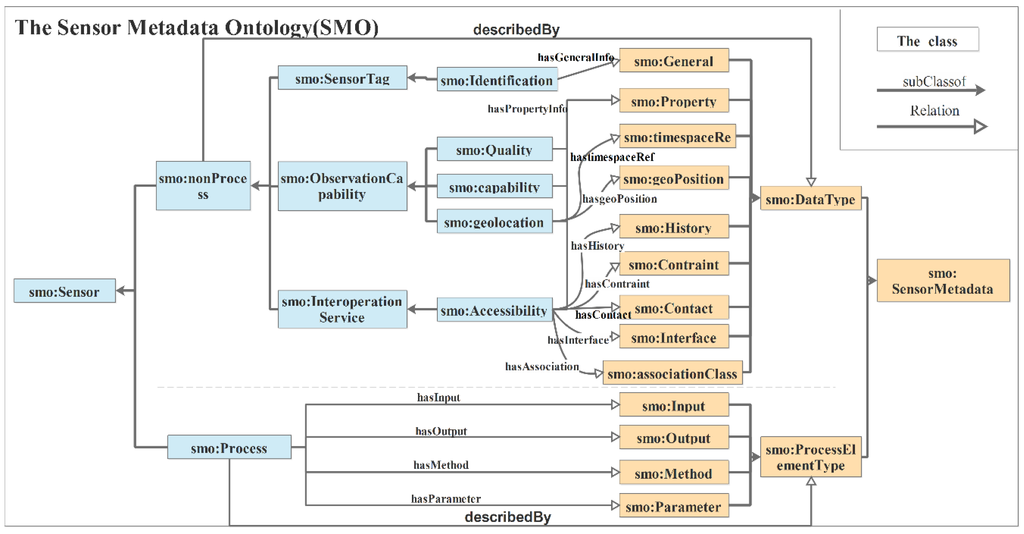
برای برآوردن ویژگیهای فوق، بر اساس SensorML [ 8 ] و متا مدل [ 26 ]، SMO شامل دو ماژول است: اطلاعات حسگر مفهومی (آیکونهای آبی در شکل 2 ) و فراداده حسگر (نمادهای زرد در شکل) . 2 ).
-
ماژول 1: اطلاعات حسگر مفهومیطبق تحقیقات قبلی [ 8 ]، ویژگی های پردازش حسگر شامل ورودی ها، خروجی ها، پارامترها و روش ها می باشد. در هستی شناسی، این ویژگی های فرآیند را می توان با کلاس “smo:Process” توصیف کرد و سایر ویژگی های حسگر را می توان با کلاس “smo:nonProcess” نشان داد.
- ●
-
کلاس “smo:Process” ویژگی های مفهومی یک فرآیند را توصیف می کند.
- ●
-
کلاس “smo:nonProcess” شامل سه زیر کلاس برای توصیف اطلاعات دقیق تر از ویژگی های موضوعی حسگر است [ 26 ، 27 ].
- (آ)
-
SensorTag: برای تشخیص حسگر، کلاس “smo:SensorTag” و “smo:Identification” به عنوان برچسب حسگر استفاده می شود.
- (ب)
-
قابلیت مشاهده: یک حسگر اغلب با اطلاعاتی توصیف می شود که شامل ویژگی های فیزیکی، اندازه گیری و ارتباطی آن و ناحیه مشاهده شده توسط حسگر است. برای هر ویژگی حسگر، عملکرد سنسور ممکن است تحت تأثیر شرایط محیطی غالب و همچنین موقعیت و مکان آن قرار گیرد. این ویژگی ها به عنوان قابلیت های مشاهده مدل سازی می شوند. بنابراین، قابلیت های مشاهده یک حسگر را می توان با استفاده از سوابق مرتبط مشخص کرد. برای مثال، ما کلاسهای «smo:capability»، «smo:geoLocation» و «smo:quality» را توسعه دادیم که از کلاس «smo:ObservationCapability» به ارث رسیدهاند.
- (ج)
-
InteroperationService: برای توصیف اطلاعات محدودیت و دسترسی به حسگر، کلاس “smo:Accessibility” می تواند این واقعیت را منعکس کند که قابلیت مشاهده یک سنسور تحت تأثیر موقعیت و مکان آن قرار می گیرد.
-
ماژول 2: فراداده حسگر
- ●
-
DataType : انواع داده ها (توصیف شده توسط کلاس “smo:datatype”) که اطلاعات غیر فرآیندی یک حسگر را توصیف می کنند. این بخش شامل نه کلاس فرعی است: “smo:General”، “smo:Property”، “smo:timespaceRef”، “smo:geoPosition”، “smo:History”، “smo:Constraint”، “smo:Contact”، “smo:Interface” و “smo:associationClass”.
- ●
-
ProcessElementType : انواع عناصر فرآیند (توصیف شده توسط کلاس smo:ProcessElementType) اطلاعات فرآیند یک حسگر را توصیف می کند که شامل “smo:Input”، “smo:Output”، “smo:Method” و “smo:Parameter” است. ” کلاس ها.
علاوه بر این، چند رابطه در هستی شناسی شرح داده شده است. اطلاعات مفهومی یک حسگر را می توان با ابرداده توصیف کرد، بنابراین ارتباط “describedBy” می تواند “smo:nonProcess” را با کلاس “smo:DataType” و “smo:Process” را با کلاس “smo:ProcessElementType” پیوند دهد. به طور مشابه، ارتباط های دیگری بین کلاس های ماژول های 1 و 2 ایجاد شد. به عنوان مثال، شناسایی حسگر دارای اطلاعات کلی است، بنابراین ارتباط “hasGeneralInfo” بین کلاس “smo:Identification” و کلاس “smo:General” وجود دارد.
SMO می تواند برخی از اطلاعات حسگر خاص، از جمله قابلیت مشاهده و سرویس عملیاتی و ورودی استفاده شده و همچنین داده های خروجی تولید شده را توصیف کند. علاوه بر این، مفاهیمی برای توصیف انواع داده های حسگرها به عنوان بخشی از فراداده حسگر گنجانده شده است. روابط در SMO را می توان هنگام جستجوی حسگرها مورد استفاده قرار داد. هستی شناسی می تواند برای توصیف حسگرهای ایستگاه های هواشناسی، ایستگاه های هیدرولوژیکی و سنسورهای ماهواره ای برای نظارت بر سیل استفاده شود. هستی شناسی یک برنامه کاربردی کشف محور است و کشف اطلاعات مربوط به حسگرها را تسهیل می کند. این ساختار می تواند برای توصیف جزئیات حسگرهایی که مربوط به یک برنامه خاص هستند استفاده شود.
2.2. نقشه برداری برای ذخیره فراداده حسگر در هستی شناسی
مدل های ebRIM و GEOSENSOR-CSW [ 7 ] دارای ویژگی های زیر هستند: (الف) ابرداده های حسگر توسط ساختار ebRIM، از جمله اشیاء، شکاف ها، طبقه بندی ها و انجمن ها ذخیره می شوند. و (ب) ساختار نمی تواند روابط بین عناصر فراداده حسگر را توصیف کند (به عنوان مثال، روابط فراداده حسگر که در بخش 2.1 توضیح داده شده است). بنابراین، مدل ebRIM اطلاعات حسگر را ذخیره میکند و در عین حال فاقد روابط نزدیک ابرداده حسگر است.
برای حل این محدودیتها، روش ثبت معنایی توصیفشده در این مقاله نه تنها قادر است روابط فراداده حسگر را از طریق هستیشناسی نشان دهد، بلکه میتواند اطلاعات را از مدل اطلاعات رجیستری به آنتولوژی تبدیل کند. بنابراین، ما نگاشت بین مدل GEOSENSOR-CSW و SMO را بر اساس فراداده حسگر در سرویس رجیستری قبلی ایجاد کردیم [ 7]]. طبق نقشه برداری، نمونه های مدل اطلاعات رجیستری را به نمونه هایی از هستی شناسی تبدیل کرد. سپس، نمونه های SMO را می توان مستقیماً در یک پایگاه داده هستی شناسی مانند پایگاه داده Oracle ذخیره کرد. علاوه بر این، نقشه برداری امکان ذخیره سازی اطلاعات مربوط به حسگرها را فراهم می کند. این امکان را فراهم می کند که مفاهیم موجود در SMO با داده های موجود در پایگاه داده نمونه سازی شوند. در این مورد، مدل اطلاعات رجیستری قبلی می تواند به طور کامل توسط ساختارهای معنایی SMO نمایش داده شود.
نقشه برداری شامل چهار بخش است:
-
نقشه برداری لبه: ExtrinsicObject (ویژگی های اساسی)ویژگی objectType در مدل GEOSENSOR-CSW به کلاس “smo:SensorMetadata” نگاشت می شود تا نوع حاشیه:ExtrinsicObject را توصیف کند، به عنوان مثال، جایی که یکی از انواع شی حسگر “system” است. ویژگی های اساسی “system” شامل sensorID، یک نام طولانی و یک توضیحات است که می تواند به ترتیب در کلاس های “smo:sensorID”، “smo:sensorLongName” و “smo:sensorDescription” SMO نگاشت شود.
-
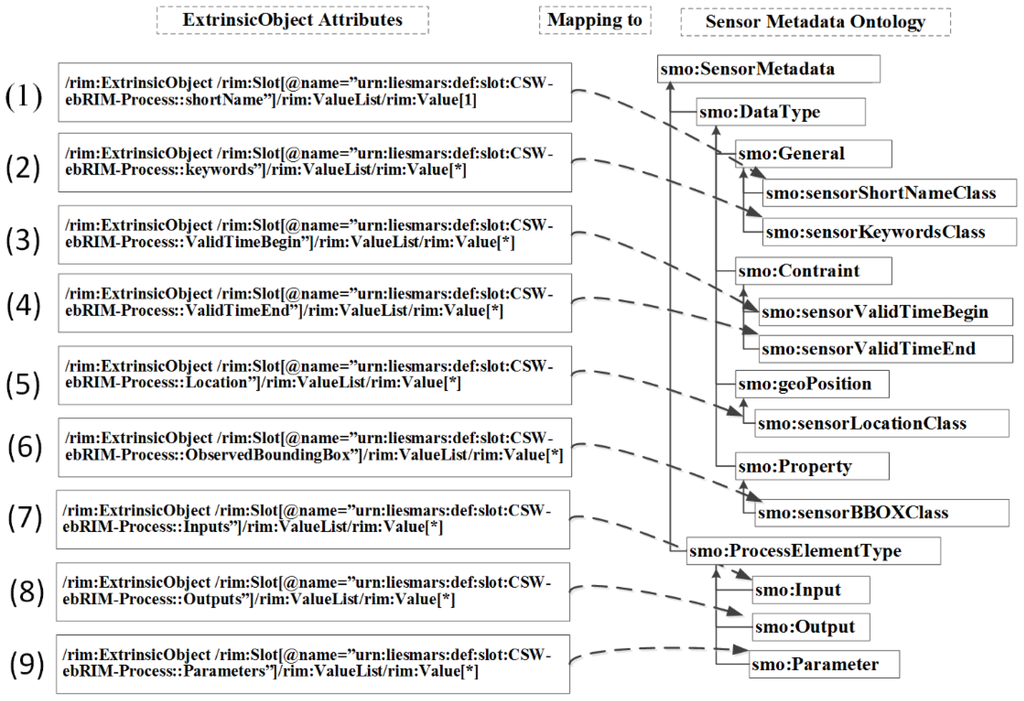
نقشه برداری لبه: شکاف ExtrinsicObject (ویژگی های اضافی)شکاف های لبه: ExtrinsicObject اطلاعات دقیق مربوط به حسگرها، مانند نام کوتاه، کلمات کلیدی، زمان معتبر، مکان، ObservedBoundingBox، ورودی ها، خروجی ها و پارامترها را ذخیره می کند. نقشه برداری از شکاف ها در شکل 3 نشان داده شده است .
- ●
-
مراحل (1) و (2) نگاشت نام های کوتاه و کلمات کلیدی را شرح می دهند.
- ●
-
مراحل (3) و (4) نگاشت ویژگی های زمان معتبر را نشان می دهد.
- ●
-
مرحله (5) نگاشت بین ویژگی مکان سنسور و کلاس “smo:sensorLocationClass” را توصیف می کند.
- ●
-
مرحله (6) کلاس “sensorBBOXClass” را بیان می کند که می تواند ناحیه مورد نظر مشاهده شده توسط یک سنسور را ذخیره کند.
- ●
-
مراحل (7) تا (9) نشان می دهد که ورودی، خروجی و ویژگی های پارامتر یک حسگر را می توان به ترتیب در کلاس های “smo:Input”، “smo:Output” و “smo:Parameter” ترسیم کرد.
-
نقشه برداری از طرح طبقه بندیدر مدل رجیستری حسگر ویژگیهایی از rim:ClassificationScheme وجود دارد که اطلاعات حسگر را طبقهبندی میکند. ما چهار زیر کلاس از کلاس “smo:ClassificationClass” برای توصیف طبقه بندی های “IntendedApplication”، “ServiceType”، “SystemType” و “OrbitType” ساختیم. چهار زیر کلاس در SMO عبارتند از: «smo:SensorClassification_IntendedApplication»، «smo:SensorClassification_ServiceType»، «smo:SensorClassification_SystemType» و «smo:SensorClassification_OrbitType».
-
نقشه برداری از انجمن هادر مدل GEOSENSOR-CSW، چهار ارتباط حسگر وجود دارد (ComposedOf، AccessibleThrough، InputConnection و OutConnection). ارتباطهای مرتبط را میتوان در کلاسهای «smo:SensorAssociation_ComposedOf»، «smo:SensorAssociation_AccessibleThrough»، «smo:SensorAssociation_InputConnection» و «smo:SensorAssociation_OutputConnection» ترسیم کرد.
2.3. نمونه هایی از هستی شناسی فراداده حسگر
همانطور که در مقدمه ذکر شد، بسیاری از حسگرها در ماهواره ها و ایستگاه های هیدرولوژیکی می توانند برای نظارت بر شرایط سیل استفاده شوند. ما دو حسگر را به عنوان نمونه های SMO انتخاب می کنیم: طیف سنج تصویربرداری با وضوح متوسط (MODIS) و سنسورهای سطح آب برای سیل. نمونه ها می توانند مستقیماً در سرویس ثبت شوند.
اطلاعات فرآیند MODIS توسط زیر کلاس های کلاس “SMO:ProcessElement” توصیف می شود. شرح غیر فرآیندی حسگر MODIS را می توان توسط SMO از طریق مراحل زیر بیان کرد:
-
اطلاعات مربوط به SensorID، SensorName، کلمات کلیدی و طبقه بندی را می توان با کلاس “smo:General” توصیف کرد.
-
ویژگی های طول، ارتفاع، عرض و منطقه مشاهده شده را می توان با کلاس “smo:Property” بیان کرد.
-
زمان مشاهده معتبر MODIS را می توان با زیر کلاس های کلاس “smo:Constraint” توصیف کرد.
-
اطلاعات تماس و رابط را می توان به ترتیب با کلاس های “smo:Contact” و “smo:Interface” توصیف کرد.
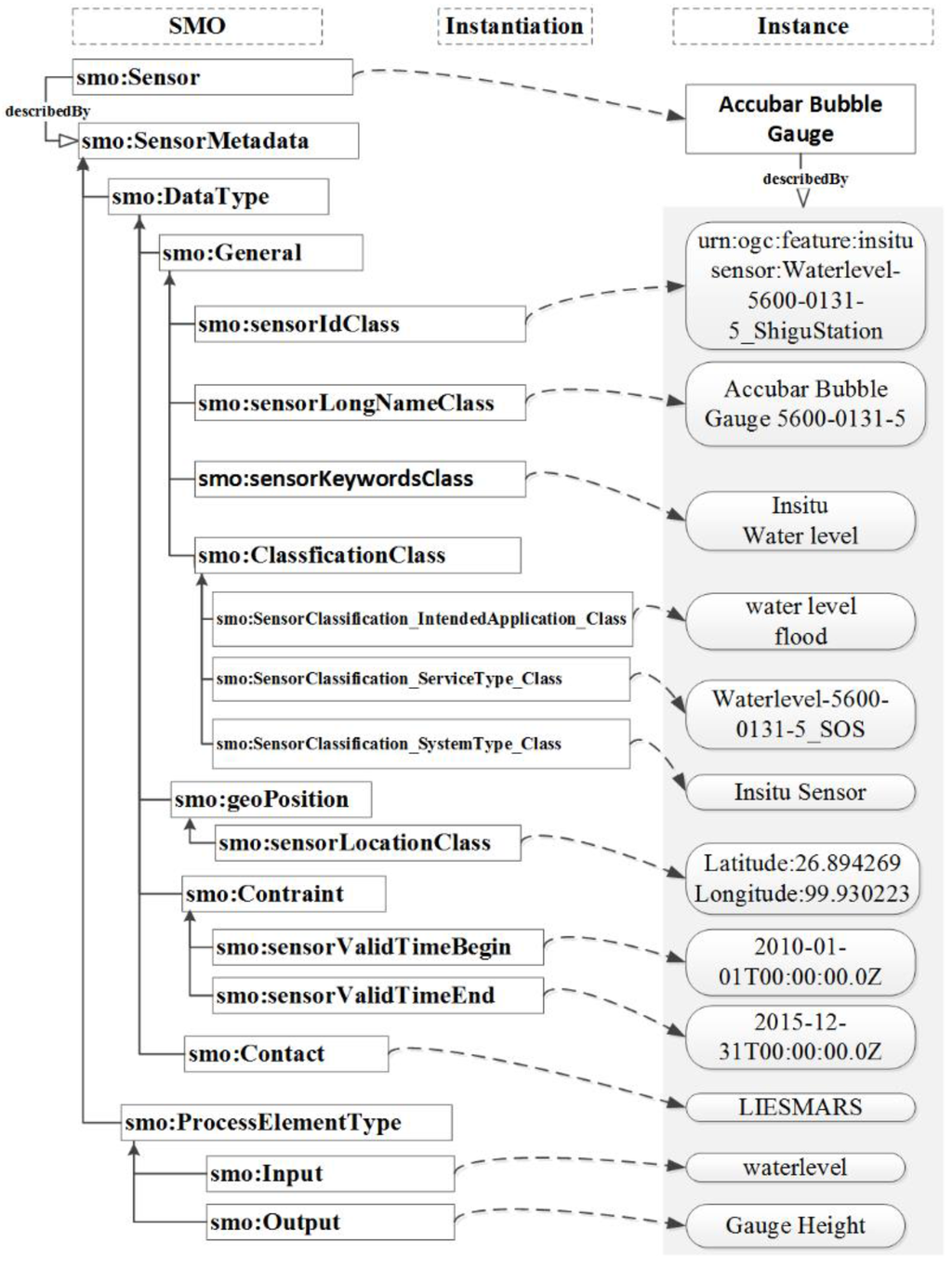
شکل 4 نشان می دهد که یک سنسور سطح آب به نام “Accubar Bubble Gauge 5600-0131-5” در SMO بیان شده است. طبقهبندی حسگر توسط زیر کلاسهای کلاس «smo:ClassificationClass» برای توصیف طبقهبندی IntendedApplication، ServiceType و SystemType نمونهسازی میشود. در مقایسه با سنسور MODIS، این حسگر حاوی اطلاعات موقعیت اضافی است که از کلاس “smo:sensorLocationClass” به ارث رسیده است، همانطور که در شکل 4 نشان داده شده است .
3. داده های تجربی و نتایج
3.1. داده های تجربی
منطقه آزمایشی (استان هوبی) در بخش میانی رودخانه یانگ تسه (108°21′-116°07’E و 29°05′-33°20′ شمالی) قرار دارد. بلایای ناشی از سیل بر کشاورزی تأثیر می گذارد و خسارات اقتصادی و اجتماعی زیادی را در هوبی ایجاد کرده است. بر اساس آمار سازمان جهانی هواشناسی (WMO) [ 28 ]، افزایش قابل توجهی در تعداد سنسورهای ماهواره ای که برای پایش سیل در دسترس هستند، وجود داشته است. ما 167 حسگر (حداکثر 120 سنسور حامل ماهواره) را انتخاب می کنیم که می توانند سیل را در هوبی نظارت کنند. داده های مطالعه برای ثبت حسگرها و یک آزمایش کشف بر اساس هستی شناسی پیشنهادی استفاده شد.
3.2. پیاده سازی
نمونه اولیه SSRS توسط آزمایشگاه کلیدی دولتی مهندسی اطلاعات در نقشه برداری، نقشه برداری و سنجش از دور (LIESMARS) دانشگاه ووهان در چین توسعه داده شد. نشان داده شد که SSRS برای سرور GEOSENSOR-CSW موثر است. برای پیاده سازی این سرویس از خدمات وب و فناوری جاوا استفاده شده است. بر اساس سرویس رجیستری قبلی (GEOSENSOR-CSW)، نام سرویس ثبت معنایی (GEOSENSOR-SSRS) را گذاشتیم. پایه ای برای پردازش اطلاعات معنایی در رجیستری حسگر ایجاد می کند.
3.2.1. ثبت معنایی SSRS
این سرویس می تواند اطلاعات حسگر را بر اساس SMO در پایگاه داده وارد کند. هنگامی که کاربر اسنادی را برای یک حسگر رمزگذاری شده توسط SensorML انتخاب می کند، سرویس به طور خودکار آن را به SMO تبدیل می کند. سپس برنامه یک درخواست XML به نام “transaction-insert” تولید می کند. این درخواست سنسورها را در GEOSENSOR SSRS ثبت می کند. عملیات درج MODIS در سرویس در شکل 5 نشان داده شده است . با وارد کردن نمونه به پایگاه داده با استفاده از عملیات “Insert”، نمونه MODIS ذخیره می شود.
3.2.2. پرس و جوی معنایی SSRS
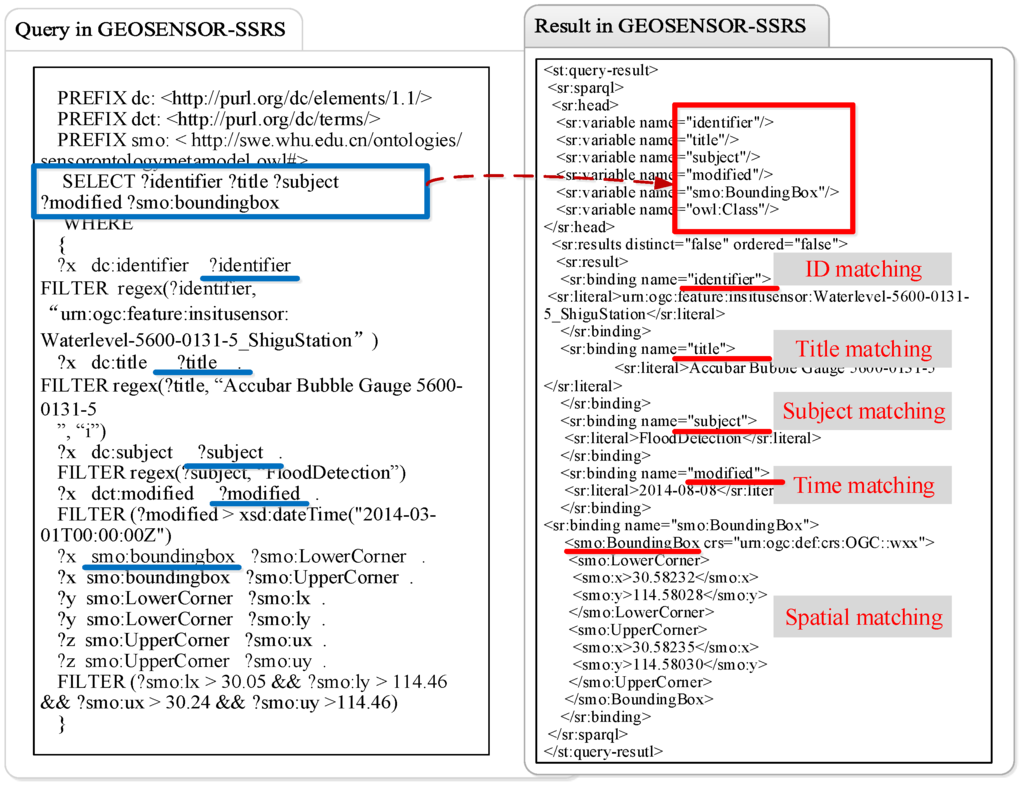
پرس و جو معنایی SSRS بر اساس عملیات GetRecords در مشخصات CSW است، با تغییراتی برای برآوردن درخواست های خاص برنامه های هیدرولوژی. پرس و جو چندین مرحله را طی می کند. ابتدا، کاربر درخواستی را مطابق با فیلترهای خاص به سرویس ارسال می کند ( به عنوان مثال ، درخواست از قالب های پرس و جو استفاده می کند). کاربر همچنین می تواند از SPARQL Query در پیاده سازی استفاده کند ( شکل 6 ). دوم، پرس و جو به پایگاه داده ارسال می شود که حاوی هستی شناسی ها و حاشیه نویسی های معنایی است. سپس، پرس و جو به توصیفات معنایی اشاره می کند و نتایج با مفاهیم مرتبط برگردانده می شود. سوم، نتیجه بر اساس پارامترهای پرس و جو به کاربر بازگردانده می شود. برای پرس و جو نشان داده شده در قسمت سمت چپ شکل 6، نتیجه پرس و جو (بخش سمت راست شکل 6 ) اطلاعات یک حسگر مربوطه را که در 30.582323 درجه شمالی و 114.58029 درجه شرقی قرار دارد، برمی گرداند. این سرویس بر اساس SMO است که ویژگی های مرتبط حسگرها را توصیف می کند، بنابراین کشف معنایی می تواند به طور موثر پیاده سازی شود.
4. بحث
4.1. مقایسه بین GEOSENSOR-CSW و SSRS
از آنجایی که میتوان از همان دادهها از سرویس رجیستری قبلی، GEOSENSOR-CSW [ 7 ] برای مقایسه دقت، یادآوری، زمان مورد نیاز و عملکرد یک جستجوی مترادف برای SSRS استفاده کرد، GEOSENSOR-CSW را به عنوان مرجع انتخاب کردیم.
-
دقت و یادآوری: اندازهگیریهای دقیق و یادآوری برای ارزیابی کیفیت تطابق بازیابی اطلاعات به کار گرفته شد. دقت کسری از نمونه های بازیابی شده است که مرتبط هستند، و یادآوری کسری از نمونه های مربوطه است که بازیابی می شوند. شکل 7 نشان می دهد که SSRS دقت و فراخوانی بهتری برای GetRecords دارد. هنگامی که تعداد سنسورها در مجموعه داده های تجربی 150 بود، دقت GetRecords 81.1٪ و فراخوانی 85.6٪ بود.
-
زمان مورد نیاز: با مجموعه داده ای متشکل از 150 حسگر، میانگین کل زمان پاسخ برای عملیات “GetRecords” تقریباً 0.841 ثانیه برای SSRS و 1.162 ثانیه برای CSW بود. شکل 8 نشان می دهد که زمان کمتری برای اجرای بازیابی با استفاده از “GetRecords” در GEOSENSOR-SSRS نسبت به GEOSENSOR-CSW زمانی که تعداد سنسورها در مجموعه داده های تجربی 100 یا 150 بود، مورد نیاز است. اما، زیرا SSRS دارای یک عملیات جدید “Semantic Query” است، زمان CPU بیشتری برای اجرای عملیات “GetCapabilities” در SSRS نسبت به CSW مورد نیاز است.
-
پرس و جوی مترادف: علاوه بر این، ما عملیات “پرس و جو معنایی” را در SSRS اضافه کردیم. مانند عملیات «GetRecords» CSW در صحنههای سیل، یک جستجوی مترادف اضافه میکند. در GEOSENSOR-CSW، مشتریان می توانند برای مطابقت با شناسه حسگر، برنامه مورد نظر و نوع حسگر، یک یا چند حسگر را با کلمات کلیدی جستجو کنند. با این حال، این سرویس با تمام نتایج مرتبط در مورد مترادف پاسخ نمی دهد. روش ثبت معنایی حسگر میتواند به پرس و جوهای مترادف با از دست دادن داده کمتر دست یابد. به عنوان مثال، هنگامی که کاربر به اطلاعات مربوط به حسگرهای مربوط به تشخیص سیل نیاز دارد، سرویس به طور خودکار مترادف های “سیل” را در پایگاه داده مانند “تازه”، “جریان” و “طغیان” جستجو می کند. SSRS می تواند اثربخشی مدیریت و بازیابی داده های حسگر را با ارائه نتایج مترادف افزایش دهد.
به عنوان مثال، هنگامی که کاربر فیلد برنامه مورد نظر به نام “flow” را در GEOSENSOR-CSW جستجو می کند، سه حسگر پیدا می شود که در قسمت سمت چپ شکل 9 نشان داده شده است . در واقع، شش حسگر ممکن در پایگاه داده وجود دارد که می تواند برای نظارت بر سیل استفاده شود. این شش حسگر شامل «AVHRR3_NOAA-16»، «AVHRR3_NOAA-17»، «AVHRR3_NOAA-19»، «AVHRR3_Metop-A»، «AVHRR3_NOAA-18» و «AVHRR3_Metop-B» هستند. در SSRS، پرس و جو “جریان” می تواند هر شش حسگر را بگیرد، همانطور که در قسمت سمت راست شکل 9 نشان داده شده است . به طور خلاصه، پرس و جو مترادف دقت بیشتری در کشف در SSRS نسبت به GEOSENSOR-CSW دارد.
4.2. مقایسه با هستی شناسی SSN
هستی شناسی شبکه حسگر و حسگر (هستی شناسی SSN)، توسعه یافته توسط W3C [ 29 ]، با هدف بهبود کاربردهای حسگر با ادغام نماهای متمرکز بر حسگر، متمرکز بر مشاهده و سیستم متمرکز است. این شامل نمایش جامع اطلاعات در شبکه حسگر است. مقایسه بین هستی شناسی SSN و هستی شناسی پیشنهادی در جدول 1 نشان داده شده است . برخی از تفاوت ها به شرح زیر است: (1) SSN مفاهیم جامع تری نسبت به SMO دارد که بر اطلاعات فراداده حسگر تمرکز دارد. (2) بیشتر نمونههای SSN بر حسگرهای درجا ، بهویژه ایستگاههای هواشناسی تمرکز میکنند، در حالی که SMO میتواند برای سنسورهای ماهوارهای و در محل استفاده شود.سنسورها؛ و (3) SMO برای ثبت و مدیریت فراداده های حسگر مناسب تر است.
4.3. مقایسه با سایر خدمات ثبت معنایی
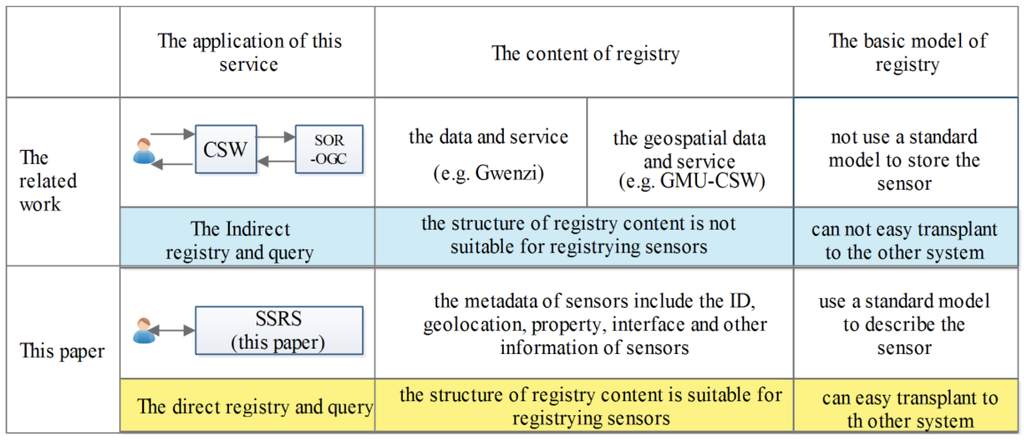
در این مقاله، رویکرد ثبت حسگر معنایی میتواند مدیریت حسگرهای مختلف از جمله دسترسی، کشف و استنتاج را تسهیل کند. در مقایسه با سایر خدمات موجود، سرویس حسگر معنایی نه تنها عملکردهای (انتشار و جستجو) یک سرویس کاتالوگ را فراهم می کند، بلکه الزامات معنایی کشف حسگر در GSW را نیز برآورده می کند، همانطور که در شکل 10 نشان داده شده است .
-
مقایسه حالت کاربرد روش رجیستری:
-
وضعیت: روش ثبت غیر مستقیم. رجیستری نمونه حسگر (SIR) [ 25 ] قادر به برداشت، مدیریت و تبدیل ابرداده حسگر است. SOR یک رابط وب سرویس است که می تواند تعاریفی از پدیده های مشاهده شده توسط حسگرها برای اکتشاف روابط معنایی بین پدیده ها ارائه دهد [ 30 ]. روش ثبت به کار گرفته شده توسط SIR و SOR یک رجیستری غیر مستقیم است. مدیران SIR/SOR باید با یک سرویس کاتالوگ عمومی که تمام نمونه های داده مربوطه را منتشر می کند، ارتباط برقرار کنند. این روش برای رجیستری و کشف سنسور وقت گیرتر است و احتمالاً اطلاعات را از دست می دهد.
-
توسعه: ثبت معنایی مستقیم برای حسگرهای ناهمگن. یک رجیستری داده و خدمات با توصیف مستقیم معناشناسی در یک سرویس کاتالوگ یک کار چالش برانگیز است. هر دو سرویس رجیستری (GEOSENSOR-CSW) و سرویس رجیستری معنایی (GEOSENSOR-SSRS) از روش ثبت مستقیم استفاده می کنند. اگر حسگرها در کاتالوگ گنجانده شده باشند، کاربران نهایی با تخصص خاصی می توانند حسگرهای بالقوه جالب را مستقیماً جستجو کنند.
-
-
مقایسه محتوای رجیستری:
-
موقعیت: معرف معنایی داده ها و خدمات مکانی است. سرویس کاتالوگ GN-ebRIM که از نظر معنایی بهبود یافته است که توسط Gwenzi [ 17 ] مورد بررسی قرار گرفت، هستی شناسی ها و حاشیه نویسی های معنایی را برای بهبود جستجو برای داده ها و خدمات یکپارچه می کند. GMU-CSW [ 20 ] از یک روش ثبت با فرمت OWL/OWL-S برای داده ها و خدمات مکانی برای پشتیبانی از جستجوهای معنایی استفاده می کند. این سرویس ها عملکرد رجیستری معنایی خوبی دارند، اما این روش نمی تواند معنایی فراداده حسگر را برای استنتاج نشان دهد.
-
توسعه: نمایش معنایی حسگرهای ناهمگن برای استنتاج. در این مقاله، روش ثبت معنایی حسگر میتواند فراداده حسگر را به یک هستیشناسی برای توصیف معنایی حسگرها تبدیل کند. تمام ابردادههای مربوط به حسگرها توسط هستیشناسی فراداده حسگر توصیف میشوند، که کارایی کشف را افزایش میدهد و از استنتاج رجیستری پشتیبانی میکند.
-
-
مقایسه با مدل پایه روش رجیستری:
-
وضعیت: برخی از روش های رجیستری از یک مدل رجیستری غیر استاندارد استفاده می کنند. یک کاتالوگ خدمات مکانی معنایی توسط Maué [ 31 ] برای پشتیبانی از کشف خدمات مکانی پیشنهاد شده است . خدمات داده کنسرسیوم فضایی باز (OGC)، مانند سرویس ویژگی های وب و سرویس نقشه وب، می توانند در کاتالوگ ثبت شوند، اما از یک مدل اطلاعات استاندارد استفاده نمی کنند.
-
توسعه: استفاده از یک زبان مدل استاندارد برای ساخت مدل رجیستری برای اشتراک گذاری ضروری است. در این مقاله از یک زبان هستی شناسی معمولی به نام OWL برای نمایش هستی شناسی استفاده شده است. تطبیق پذیری و توانایی اشتراک گذاری هستی شناسی پیشنهادی را افزایش می دهد.
-
5. نتیجه گیری ها
این مقاله ساختارهای معنایی را در یک رجیستری حسگر تعبیه می کند که می تواند رجیستری و مدیریت حسگر را در GSW پیش ببرد. در مقایسه با کاتالوگ های دیگر، SSRS شامل هستی شناسی های حسگر است که در OWL کدگذاری شده اند تا همزمان قابلیت های جستجوی معنایی را ارائه دهند. بر اساس اهداف این پروژه تحقیقاتی می توان به نتایج زیر دست یافت:
-
روش رجیستری حسگر معنایی از پرس و جوی مترادف و رجیستری حسگر مستقیم پشتیبانی می کند که دقت بهتری را برای بازیابی امکان پذیر می کند و به زمان کوتاه تری نیاز دارد.
-
انواع مختلفی از حسگرها (به عنوان مثال، سنسورهای ماهواره ای و حسگرهای درجا ) می توانند در SSRS از طریق هستی شناسی پیشنهادی ذخیره شوند، که مدیریت کارآمد و به اشتراک گذاری حسگرهای ناهمگن را تسهیل می کند.
ما قصد داریم با پیاده سازی آن در یک شبکه باز، عملکرد و مقیاس پذیری سرویس را بهبود بخشیم. علاوه بر این، بهبود پرس و جو از طریق تجسم هستی شناسی مستلزم مطالعه بیشتر است، به موجب آن کاربران می توانند با سلسله مراتب مفاهیم مرتبط با منابع از طریق توضیحات فراداده خود تعامل داشته باشند. این به کاربران امکان می دهد مفهوم جستجوی مناسب را برای پرس و جو حسگر هوشمند انتخاب کنند تا از دست دادن اطلاعات جلوگیری کنند.
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| GSW | وب حسگر جغرافیایی |
| SMO | هستی شناسی فراداده حسگر |
| SSRS | سرویس رجیستری معنایی حسگر |
| SensorML | زبان مدل سنسور |
| ebRIM | مدل اطلاعات رجیستری ebXML |
| جغد | زبان هستی شناسی وب |
منابع
- چن، ز. چن، ن. یانگ، سی. Di, L. Cloud computing سرویس پردازش وب را برای پردازش داده های رصد زمین فعال کرد. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2012 ، 5 ، 1637-1649. [ Google Scholar ] [ CrossRef ]
- لیانگ، SHL؛ کرویتورو، آ. تائو، CV یک زیرساخت جغرافیایی توزیع شده برای حسگر وب. محاسبه کنید. Geosci. 2005 ، 31 ، 221-231. [ Google Scholar ] [ CrossRef ]
- جان، AM; پل، WM; گریگوری، ص. رایان، سرور اطلاعات WR Hydrologic برای مجموعه داده های بارش معیار. محاسبه کنید. Geosci. 2013 ، 50 ، 145-153. [ Google Scholar ]
- هرمان، ک. الکساندر، ک. پورتال آب زیرزمینی SMART: چارچوب سازماندهی خدمات وب OGC برای هیدرولوژی برای بهبود دسترسی و تجسم داده ها در نیوزیلند. محاسبه کنید. Geosci. 2014 ، 69 ، 78-86. [ Google Scholar ]
- نبرت، دی. وایتساید، ا. Vretanos، P. مشخصات خدمات کاتالوگ OpenGIS. OGC 07-006r1. در دسترس آنلاین: http://portal.opengeospatial.org/files/?artifact_id=20555 (در تاریخ 12 مارس 2015 قابل دسترسی است).
- فوگر، اس. نعیمی، ف. Stojanovic، N. ebXML رجیستری مدل اطلاعات نسخه 3.0. در دسترس آنلاین: http://docs.oasis-open.org/regrep/v3.0/specs/regrep-rim-3.0-os.pdf (دسترسی در 3 ژوئن 2013).
- چن، ن. وانگ، ایکس. Yang, X. یک روش خدمات رجیستری مستقیم برای حسگرها و الگوریتم ها بر اساس مدل فرآیند. محاسبه کنید. Geosci. 2013 ، 56 ، 45-55. [ Google Scholar ] [ CrossRef ]
- بوتس، ام. Robin, A. مشخصات پیاده سازی زبان مدل سنسور OpenGIS (SensorML). در دسترس آنلاین: http://portal.opengeospatial.org/files/?artifact_id=21273 (دسترسی در 25 دسامبر 2012).
- چاوز، اف. Mossgraber، J. شنک، م. Bugel، U. ثبت معنایی برای شبکه های حسگر ناهمگن: پل زدن شکاف معنایی برای مدیریت بحران های مشارکتی. در مجموعه مقالات بیست و چهارمین کارگاه بین المللی 2013 در مورد پایگاه داده و کاربردهای سیستم های خبره (DEXA)، لس آلامیتوس، کالیفرنیا، ایالات متحده آمریکا، 26 تا 30 اوت 2013. صص 118-122.
- چوی، اچ اس. معماری وب حسگر معنایی Rhee، WS توزیع شده. در مجموعه مقالات کنفرانس TENCON 2012-2012 منطقه 10 IEEE، سبو، فیلیپین، 19-22 نوامبر 2012. صص 1-6.
- دوربه، اس اس؛ پادشاه، RL; امانچی، SK; بهمیردی، اس. ابزارهای میانافزار و ابزارهای مبتنی بر استانداردهای یونان برای برنامههای کاربردی وب حسگر ساحلی. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2010 , 3 , 451-466. [ Google Scholar ] [ CrossRef ]
- شث، ا. هنسون، سی. ساهو، وب حسگر معنایی SS. محاسبات IEEE. Soc. 2008 ، 12 ، 78-83. [ Google Scholar ] [ CrossRef ]
- برنقی، پ. Presser، M. انتشار دادههای حسگر مرتبط. در دسترس آنلاین: http://ceur-ws.org/Vol-668/paper2.pdf (دسترسی در 9 مارس 2015).
- چن، ال. شادبولت، NR; گوبل، سی. تائو، اف. مدیریت فراداده معنایی برای خدمات شبکه وب. بین المللی J. وب سرور. Res. 2006 ، 3 ، 73-94. [ Google Scholar ] [ CrossRef ]
- فینی، KT; Watts, D. خدمات فهرست ویژگی های معنایی مبتنی بر REST. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1057-1524. [ Google Scholar ] [ CrossRef ]
- یو، پی. گونگ، جی. دی، ال. او، ال. Wei, Y. ثبت و کشف منشأ معنایی با استفاده از سرویس کاتالوگ جغرافیایی. در دسترس آنلاین: http://people.csail.mit.edu/pcm/tempISWC/workshops/SWPM2010/InvitedPaper_1.pdf (در 12 مارس 2013 قابل دسترسی است).
- Gwenzi، J. افزایش جستجوی فضایی وب با فناوری وب معنایی و تجسم فراداده. پایان نامه کارشناسی ارشد، موسسه بین المللی علوم اطلاعات جغرافیایی و رصد زمین، Enschede، هلند، 2010. [ Google Scholar ]
- سهام، KM; اتکینسون، آر. هیگینز، سی. کوچک، م. وولف، ا. میلارد، ک. Arctur، D. یک رجیستری معنایی با استفاده از کاتالوگ نوع ویژگی به جای هستی شناسی برای پشتیبانی از زیرساخت های داده های مکانی. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 231-252. [ Google Scholar ] [ CrossRef ]
- کولگریو، جی. آکیراجو، ر. گودوین، آر. تطبیق خارجی در UDDI. در دسترس آنلاین: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1314743 (در 3 ژوئن 2013 قابل دسترسی است).
- یو، پی. گونگ، جی. دی، ال. او، ال. Wei, Y. یکپارچهسازی فناوریهای وب معنایی و خدمات فهرست مکانی برای کشف و پردازش اطلاعات مکانی در زیرساختهای سایبری. Geoinformatica 2011 ، 15 ، 273-303. [ Google Scholar ] [ CrossRef ]
- لاسوئد، ی. رایت، دی. برمودز، ال. بوسلما، O. میانجیگری مبتنی بر هستی شناسی سرویس کاتالوگ OGC برای وب – راه حل مجازی برای یکپارچه سازی اطلس های وب ساحلی. در دسترس آنلاین: http://dusk2.geo.orst.edu/ICSOFT08_Lassoued_Final.pdf (در 3 ژوئن 2013 قابل دسترسی است).
- سیواشنموگام، ک. ورما، ک. شث، ا. Miller, J. افزودن معناشناسی به استانداردهای خدمات وب. در دسترس آنلاین: http://lsdis.cs.uga.edu/lib/download/SVSM03-ICWS-final.pdf (در 12 مارس 2015 قابل دسترسی است).
- سرینیواسان، ن. پائولوچی، ام. Sycara، K. افزودن OWL-S به UDDI، پیاده سازی و توان عملیاتی. در مجموعه مقالات اولین کارگاه بین المللی خدمات وب معنایی و ترکیب فرآیندهای وب. در دسترس آنلاین: www.cs.cmu.edu/~softagents/papers/cr-swsws-paper.pdf (در 12 مارس 2015 قابل دسترسی است).
- یو، پی. دی، ال. ژائو، پی. یانگ، دبلیو. یو، جی. وی، Y. تقویت معنایی برای سرویس کاتالوگ جغرافیایی. در دسترس آنلاین: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4242042 (در 3 ژوئن 2013 قابل دسترسی است).
- جیرکا، س. Nust، D. OGC Sensor Observable Registry (SOR) مقاله بحث. OGC 09-112r1. در دسترس آنلاین: http://portal.opengeospatial.org/files/?artifact_id=40571 (در 12 مارس 2013 قابل دسترسی است).
- چن، ن. Hu, C. یک متا مدل قابل اشتراک و قابل اجرا برای سنسورها و مشاهدات ماهواره ای جوی. IEEE J. Sel. بالا. Appl. رصد زمین. Remote Sens. 2012 ، 5 ، 1-12. [ Google Scholar ] [ CrossRef ]
- مالوسکی، سی. بروینگ، ا. مائو، پی. Janowicz، K. خواستگاری معنایی و میانجیگری برای حسگرها در وب حسگر. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2013 ، 99 ، 1-6. [ Google Scholar ]
- WMO. لیست تمام ماهواره ها در دسترس آنلاین: http://www.wmo-sat.info/oscar/satellites (در 12 مارس 2015 قابل دسترسی است).
- W3C. گزارش نهایی شبکه حسگر معنایی XG. در دسترس آنلاین: http://www.w3.org/2005/Incubator/ssn/XGR-ssn-20110628/ (در 12 مارس 2015 قابل دسترسی است).
- جیرکا، س. بروینگ، ا. Stasch, C. مکانیسم های کشف برای وب حسگر. IEEE Sens. 2009 ، 9 ، 2661–2681. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Maué, P. فهرست معنایی قابل توسعه برای خدمات وب جغرافیایی. بین المللی جی. اسپات. زیرساخت داده Res. 2008 ، 3 ، 168-191. [ Google Scholar ]
شکل 1. جریان سرویس ثبت معنایی حسگر.
شکل 2. ساختار هستی شناسی فراداده حسگر.
شکل 3. نقشه برداری از شکاف های ExtrinsicObject.
شکل 4. نمای ساده شده نمونه سنسور سطح آب برای SMO.

شکل 5. بخشی از عملیات “Insert”.
شکل 6. درخواست و پاسخ یک پرسش SPARQL.

شکل 7. دقت و یادآوری عملیات GetRecords در CSW و SSRS.

شکل 8. میانگین زمان مورد نیاز برای دو عملیات در CSW و SSRS.

شکل 9. مقایسه یک پرس و جو در GEOSENSOR-CSW و GEOSENSOR-SSRS.

شکل 10. مقایسه با سایر خدمات ثبت معنایی.

جدول 1. مقایسه بین هستی شناسی SMO و SSN.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر