1. معرفی
جهت گیری مطلق یک روش اساسی در زمینه فتوگرامتری است و نقش مهمی در تبدیل نقاط سه بعدی (3D) از یک سیستم مرجع مختصات محلی به یک سیستم مرجع مختصات جهانی (ژئودتیک) دارد. این تکنیک به طور گسترده در کاربردهای متعددی مانند ساخت مدلهای سه بعدی شهر با استفاده از سیستمهای نقشهبرداری تلفن همراه استریو چند نمای [ 1 ، 2 ، 3 ]، تولید نقشههای سه بعدی [ 4 ، 5 ]، بازسازی ساختمانها استفاده شده است. 6 ، 7 ، 8 ، 9 ] و مدل های انسانی سه بعدی، و ساخت مدل های فیزیکی سه بعدی مجسمه های بزرگ [ 10 ، 11].
روش جهت گیری مطلق کلاسیک به طور دقیق روابط هندسی بین نقاط سه بعدی در سیستم های مرجع مختصات محلی و جهانی را با استفاده از یک تبدیل تشابه نشان می دهد که از یک پارامتر مقیاس بندی، سه زاویه چرخش و سه پارامتر برداری ترجمه تشکیل شده است [12 ] . مسئله ای که باید حل شود را می توان به عنوان یک مسئله حداقل مربعات غیر خطی بر اساس این هفت پارامتر مجهول برای سه یا چند جفت نقطه سه بعدی در دو سیستم مرجع مختصات تعریف کرد. راه حل را می توان از طریق یک روش بهینه سازی غیر خطی به دست آورد، که در آن مقادیر بهینه در فضای متغیر مجهول را می توان از طریق تکرار متوالی از برخی شرایط اولیه به دست آورد. بلوستاین و همکاران [ 13] حداقل های جهانی این مسئله بهینه سازی غیرخطی را با استفاده از روش حل تکراری برای بدست آوردن تخمین های دقیق مورد مطالعه قرار داد. اگرچه روش تکراری می تواند تخمین های دقیقی ایجاد کند، پارامترهای تبدیل نیاز به مقداردهی اولیه دارند. علاوه بر این، اگر ماتریس هسی منفرد باشد، واگرایی ممکن است رخ دهد. بسیاری از مطالعات بر روی دستیابی به یک راه حل شکل بسته بدون مقداردهی اولیه متمرکز شده اند. هورن و همکاران [ 14 ] یک راه حل جهت گیری مطلق شکل بسته با استفاده از ماتریس های متعارف پیشنهاد کرد. با این حال، این الگوریتم اغلب یک ماتریس چرخش نادرست تولید می کند. آرن و همکاران [ 15 ] این مشکل را با استفاده از روش بسته دیگری بر اساس تجزیه ارزش منفرد (SVD) برای تعیین پایدار پارامترهای تبدیل حل کرد.
در این روشهای قبلی، یک تبدیل تشابه واحد با مجموعهای از هفت پارامتر برای نشان دادن روابط بین اشیاء در دو سیستم مرجع مختصات، همانطور که در فتوگرامتری هوایی اعمال میشود، استفاده شد. با این حال، اگر منطقه مورد مطالعه به اندازه کافی بزرگ باشد، این روش ها تبدیل نقطه ای نادرست ایجاد می کنند. این نادرستی ها در درجه اول به این دلیل به وجود می آیند که تبدیل های نقطه ای با تغییر شکل زیاد در یک مورد مطالعه در مقیاس بزرگ نمی توانند الزامات تبدیل جسم صلب را برآورده کنند، همانطور که توسط مجموعه منفرد هفت پارامتر تبدیل تشابه استفاده شده در روش کلاسیک نشان داده شده است. بنابراین، نمایش دقیق تبدیل دو مجموعه نقطه با استفاده از یک تبدیل تشابه واحد از این نوع غیرممکن است و بنابراین، یک ریشه میانگین مربع خطای بزرگتر (RMSE) رخ می دهد. این مطالعه یک روش تبدیل جدید را پیشنهاد میکند که شباهتهای محلی مختلف را به جای تکیه بر یک تبدیل تشابه واحد ترکیب میکند. یک شباهت محلی به مجموعه ای از تبدیل شباهت اطلاق می شود که با استفاده از سه جفت نقطه سه بعدی در یک منطقه محلی محاسبه می شود. یک مدل شبکه نامنظم مثلثی (TIN) برای تقسیم جفت نقاط سه بعدی داده شده به مثلث های مختلف استفاده می شود. شباهت های محلی را می توان با استفاده از سه راس هر مثلث محاسبه کرد. تبدیل جدید بر حسب شباهت های محلی محاسبه شده از همه مثلث ها بیان می شود. این شباهت ها با استفاده از یک تابع توان وزنی ترکیب می شوند. یک شباهت محلی به مجموعه ای از تبدیل شباهت اطلاق می شود که با استفاده از سه جفت نقطه سه بعدی در یک منطقه محلی محاسبه می شود. یک مدل شبکه نامنظم مثلثی (TIN) برای تقسیم جفت نقاط سه بعدی داده شده به مثلث های مختلف استفاده می شود. شباهت های محلی را می توان با استفاده از سه راس هر مثلث محاسبه کرد. تبدیل جدید بر حسب شباهت های محلی محاسبه شده از همه مثلث ها بیان می شود. این شباهت ها با استفاده از یک تابع توان وزنی ترکیب می شوند. یک شباهت محلی به مجموعه ای از تبدیل شباهت اطلاق می شود که با استفاده از سه جفت نقطه سه بعدی در یک منطقه محلی محاسبه می شود. یک مدل شبکه نامنظم مثلثی (TIN) برای تقسیم جفت نقاط سه بعدی داده شده به مثلث های مختلف استفاده می شود. شباهت های محلی را می توان با استفاده از سه راس هر مثلث محاسبه کرد. تبدیل جدید بر حسب شباهت های محلی محاسبه شده از همه مثلث ها بیان می شود. این شباهت ها با استفاده از یک تابع توان وزنی ترکیب می شوند. تبدیل جدید بر حسب شباهت های محلی محاسبه شده از همه مثلث ها بیان می شود. این شباهت ها با استفاده از یک تابع توان وزنی ترکیب می شوند. تبدیل جدید بر حسب شباهت های محلی محاسبه شده از همه مثلث ها بیان می شود. این شباهت ها با استفاده از یک تابع توان وزنی ترکیب می شوند.
این مقاله به شرح زیر تنظیم شده است. بخش 2 به طور خلاصه روش جهت گیری مطلق کلاسیک را بر اساس یک تبدیل تشابه منفرد معرفی می کند. بخش 3 روش جدید جهت گیری مطلق پیشنهادی را بر اساس شباهت های محلی معرفی می کند. عملکرد روش پیشنهادی با استفاده از شش مجموعه داده شبیه سازی شده و یک مجموعه داده واقعی در بخش 4 نشان داده شده است . بخش 5 نتیجه گیری را ارائه می کند.
2. تبدیل تشابه منفرد
روش جهت گیری مطلق کلاسیک، تبدیل بهینه جسم صلب را برای انجام تبدیل نقطه سه بعدی از یک سیستم مرجع مختصات محلی به یک سیستم مرجع جهانی جستجو می کند. این فرآیند معمولاً در قالب یک تبدیل تشابه تنها با هفت درجه آزادی بیان می شود. یک مجموعه واحد از پارامترهای تبدیل تشابه برای تبدیل نقاط از سیستم مختصات محلی به سراسری برآورد شده است. روش کلاسیک نیز در این مطالعه به عنوان تبدیل تشابه منفرد نامیده می شود. تبدیل تشابه واحد را می توان به صورت زیر نوشت:
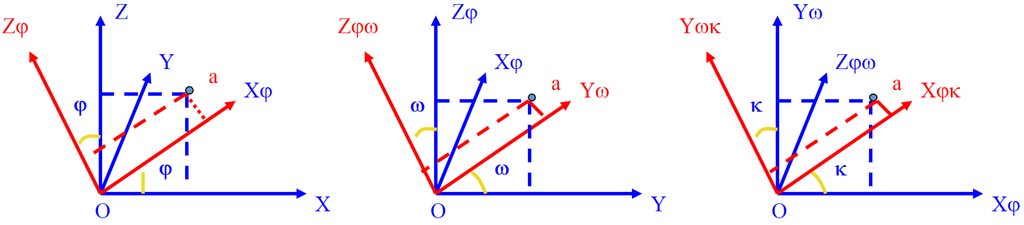
جایی که پLپ�و پجیپجیبه ترتیب به نقاط متناظر در سیستم مرجع مختصات محلی و جهانی مراجعه کنید و s (پارامتر مقیاس بندی)، R (ماتریس چرخش) و t (بردارهای ترجمه) یک مجموعه واحد از هفت پارامتر شباهت ناشناخته را تشکیل می دهند. همانطور که در شکل 1 نشان داده شده است ، اگر بتوان یک شی را به طور پیوسته حول محورهای y- ، x- و z- [ 16 ] بچرخاند ، ماتریس چرخش تفصیلی را می توان به صورت زیر نوشت:
روش کلاسیک تبدیل نقاط سه بعدی محلی (آبی) به نقاط سه بعدی جهانی (قرمز) که در آن یک تبدیل شباهت واحد ( s , R , t )(س،آر،تی)برای نمایش کامل تبدیل بین دو سیستم مختصات استفاده می شود، در شکل 2 نشان داده شده است .
برای هر جفت نقطه سه بعدی می توان سه معادله فرموله کرد. بنابراین لازم است هفت پارامتر را با استفاده از حداقل دو و یک سوم جفت نقاط سه بعدی تخمین بزنیم. مشاهدات اضافی برای یک مجموعه واحد از پارامترهای تبدیل تشابه زمانی وجود دارد که سه یا چند جفت در دسترس باشند. پارامترهای ناشناخته را می توان با استفاده از روش بهینه سازی تکراری بهینه کرد. مسئله بهینهسازی را میتوان با استفاده از یک راهحل بسته که از SVD کامل استفاده میکند، حل کرد. راه حل های دقیق SVD در مطالعات قبلی [ 14 ، 17 ] ارائه شده است .
3. نمایندگی شباهت های محلی
اندازهگیریها برای مسئله حداقل مربعات غیرخطی کلاسیک شامل تمام نقاط سه بعدی در سیستم مرجع مختصات جهانی میشود. این نقاط برای بهینه سازی هفت پارامتر تبدیل شباهت برای مسئله جهت گیری مطلق استفاده می شوند. در اینجا، این نقاط سه بعدی در نظر گرفته میشوند که نقش یکسانی را در تبدیل نقطه ایفا میکنند و محدودیتهای مشابهی ایجاد میکنند. با این حال، می توان انتظار داشت که توزیع این نقاط بر دقت حل مسئله جهت گیری مطلق تأثیر بگذارد.
این بخش روش تبدیل پیشنهادی جدید را مورد بحث قرار می دهد که از نمایش شباهت های محلی مربوط به توپوگرافی هندسی نقاط کنترل زمینی (GCPs) استفاده می کند. یک مدل TIN برای ساخت توپوگرافی GCP استفاده می شود و شباهت های محلی مختلفی بر اساس هر مثلث در مدل TIN محاسبه می شود. سپس تحول جدید بر اساس این شباهت های محلی تخمین زده می شود. بر خلاف روش جهت گیری مطلق کلاسیک، تعداد مجموعه پارامترهای تبدیل تخمین زده شده یک نیست، بلکه برابر با تعداد نقاط محلی است که باید به مرجع مختصات جهانی تبدیل شود. این مجموعه از پارامترهای تبدیل تخمین زده شده برای تبدیل مستقیم نقاط در سیستم مرجع مختصات محلی به سیستم مرجع مختصات جهانی استفاده می شود.
3.1. تولید مدل شبکه نامنظم مثلثی
TINها ساختارهای داده دیجیتالی هستند که به طور گسترده برای نشان دادن سطوح در مطالعات سیستم اطلاعات جغرافیایی (GIS) و فتوگرامتری استفاده می شوند [ 18 ، 19 ]. اولین مدل TIN در اوایل دهه 1970 به عنوان روشی ساده برای ساخت یک سطح با استفاده از مجموعه ای از نقاط با فاصله نامنظم پیشنهاد شد. مدل های TIN را می توان به طور گسترده به دلیل نحوه توصیف و حفظ روابط فضایی به کار برد [ 20 ، 21]. یک مدل TIN در روش تبدیل پیشنهادی برای تقسیم یک منطقه به مثلثهای مجاور متعدد با استفاده از GCPهای داده شده، که در راس این مثلثها در سیستم مرجع مختصات محلی قرار دارند، استفاده میشود. سپس هفت پارامتر تبدیل تشابه را می توان با استفاده از سه جفت GCP از هر مثلث بازیابی کرد. تبدیلهای شباهتی که از هر مثلث به دست میآیند، شباهتهای محلی نامیده میشوند که به بهترین وجه روابط بین دو مثلث متناظر را در دو سیستم مرجع مختصات نشان میدهند. مدل TIN از GCPها ساخته شده است به طوری که معیار مثلث Delaunay در مقیاس محلی برآورده می شود، به این معنی که دایره ای که از سه GCP یک مثلث معین می گذرد حاوی هیچ نقطه دیگری نخواهد بود.
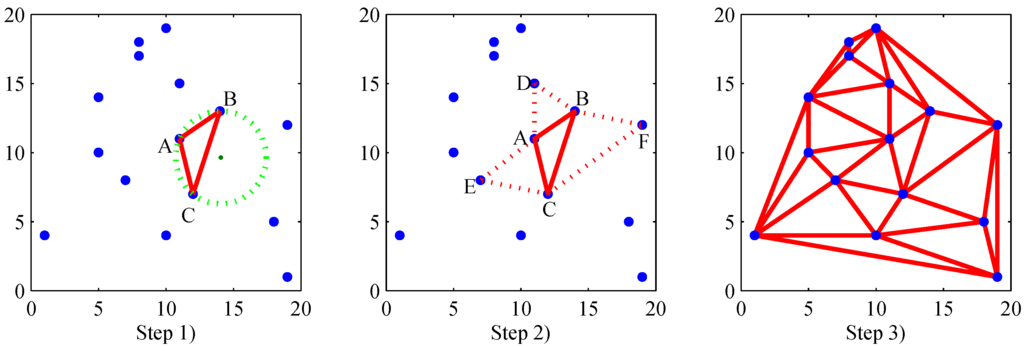
الگوریتم رشد مثلث [ 22 ] که در شکل 3 نشان داده شده است برای تولید مدل TIN از GCPها استفاده می شود. یک مثال ساده از ساخت TIN با استفاده از 15 GCP به شرح زیر توضیح داده شده است:
(1) تولید مثلث دلونی اولیه. ابتدا، یک GCP “A” را پیدا کنید که نزدیک به مرکز هندسی همه GCPها است. سپس، با یافتن نقطه دیگری «B» که نزدیکترین نقطه به «A» است، خط پایه اولیه AB را جستجو کنید. مثلث اولیه دلونی با یافتن نقطه سوم “C” که معیار مثلث دلونی را برآورده می کند، ایجاد می شود.
(2) رشد شبکه مثلثی. سه نزدیکترین نقطه “D”، “E” و “F” که معیار دلونی را برای هر لبه مثلث اولیه برآورده می کنند، مشخص می شوند.
(3) ساخت مدل TIN. شبکه مثلثی با تکرار (2) توسعه می یابد تا زمانی که همه GCP ها به عنوان رئوس مثلث گنجانده شوند.
3.2. برآورد تحول جدید بر اساس شباهت های محلی
مجموعه ای از هفت پارامتر شباهت را می توان به طور موثر از سه GCP تخمین زد، همانطور که در بخش 2 بیان شد . بنابراین مجموعههای مختلفی از هفت پارامتر تبدیل شباهت را میتوان به دست آورد، که هر کدام از مجموعهای متفاوت از سه رأس مثلث هستند. چنین مجموعه ای از پارامترهای تبدیل تشابه بر اساس سه رأس مثلث، شباهت محلی نامیده می شود و این شباهت های محلی برای تخمین تبدیل جدید پیشنهاد شده در این مطالعه استفاده می شود.
فرض کنید که n مثلث برای یک مجموعه نقطه معین حاوی N جفت GCP و نقاط محلی متناظر آنها وجود داشته باشد. مجموعه های مختلفی از پارامترهای تبدیل محلی (سمن،آرمن،تیمن)(سمن،آرمن،تیمن)را می توان از هر مثلث بازیابی کرد i ( 1 ≤ i ≤ n )من(1≤من≤�)با استفاده از روش شرح داده شده در بخش 2 . هر مثلث هنگام تبدیل یک نقطه بررسی مرجع مختصات محلی (CP) تأثیر متفاوتی را اعمال می کند. پLپ�به مختصات جهانی CP پجیپجی. بنابراین، مختصات محلی پLپ�را می توان به مختصات جهانی تبدیل کرد پجیپجی، تبدیل پیشنهادی که تابعی از شباهت های محلی است به شرح زیر است:
جایی که wمن(پjL)�من(پ��)وزن آن است منتی ساعتمنتیساعتمثلث، که توسط یک تابع وزنی تعیین می شود که در بخش بعدی مورد بحث قرار خواهد گرفت. این تابع مشارکت شباهت های محلی مختلف را در تبدیل نقطه ای تعریف می کند پjLپ��.
هشت GCP و CP (A) نشان داده شده در شکل 4 یک مثال ساده ارائه می دهند. هشت مثلث بر اساس مدل TIN ساخته شده است که در آن هر رأس مربوط به یک GCP است. از سه رأس هر مثلث برای به دست آوردن هشت شباهت محلی استفاده می شود که می توان آنها را به صورت نوشتاری نوشت { (سمن،آرمن،تیمن) , i = 1 , 2 , . . . , 8 }{(سمن،آرمن،تیمن)،من=1،2،...،8}. در همین حال، وزن هشت مثلث با نشان داده می شود wΔ 1 ، 2 ، 5،wΔ 2 ، 5 ، 6،wΔ 5 ، 6 ، 8،wΔ 5 ، 7 ، 8،wΔ 4 ، 5 ، 7،wΔ 3 ، 4 ، 7،wΔ 1 ، 3 ، 4��1،2،5،��2،5،6،��5،6،8،��5،7،8،��4،5،7،��3،4،7،��1،3،4و wΔ 1 ، 4 ، 5��1،4،5. نقطه A، نشان داده شده توسط پآLپ�آدر سیستم مرجع مختصات محلی، می تواند به نقطه تبدیل شود پآجیپجیآدر مرجع مختصات جهانی از طریق:
مقادیر وزنی باید محدودیت زیر را برآورده کنند:
3.3. تابع وزن برای ترکیب شباهت های محلی
تابع وزن معرفی شده در معادله ( 3 ) برای ترکیب شباهت های محلی محاسبه شده از تمام مثلث ها در مدل TIN برای تخمین تبدیل جدید استفاده می شود. این تابع وزنی را می توان به عنوان تابعی از توزیع نقطه بیان کرد که می تواند بر اساس فواصل بین یک CP و سه راس هر مثلث در سیستم مرجع مختصات محلی اندازه گیری شود. وزنهای محاسبهشده با استفاده از تابع وزندهی باید برای مثلثهای دور از CP کوچک و برای مثلثهای نزدیکتر به CP بزرگ باشند.
خطوط چین قرمز در شکل 3 نشان دهنده فواصل بین یک CP و سه راس مثلث نزدیک است، در حالی که خطوط چین آبی نشان دهنده فاصله بین یک CP و سه راس یک مثلث دور است. وزن منΔ 1 ، 2 ، 5من�1،2،5از مثلث Δ1 ، 2 ، 5�1،2،5با توجه به یک CP داده شده را می توان به عنوان یک تابع توان بیان کرد:
جایی که دمن A=(ایکسمن–ایکسآ)2+(yمن–yآ)2+ +(zمن–zآ)2––––––––––––––––––––––––––––––√, ( 1 ≤ i ≤ 8 )دمنآ=(ایکسمن–ایکسآ)2+(�من–�آ)2++(�من–�آ)2،(1≤من≤8). د1 Aد1آ، د2 الفد2آ، و د5 الفد5آنشان دهنده فواصل بین سه راس مثلث و CP است. برای دقت بهینه در این مطالعه، شاخص قدرت-قانون q روی 60 تنظیم شده است. تأثیر شاخص قدرت-قانون بر دقت در بخش 4.3 به تفصیل تحلیل شده است .
سپس محدودیت موجود در رابطه ( 5 ) را می توان به صورت زیر برآورده کرد. برای n مثلث، وزن نرمال شده از منتی ساعتمنتیساعتمثلث نسبت به jتی ساعت�تیساعتCP پمنLپ�مناز رابطه زیر بدست می آید
4. آزمایش ها و بحث
برای تجزیه و تحلیل عملکرد روش جهت گیری مطلق، باید دو مجموعه از نقاط سه بعدی در دو سیستم مرجع مختصات مختلف ارائه شود. برای تجزیه و تحلیل ارائه شده در این مقاله، روش تنظیم بسته نرم افزاری (BA)، نوعی مثلث بندی هوایی، برای تولید چنین نقاط سه بعدی با استفاده از نقاط تصویر دوبعدی (2 بعدی) به عنوان ورودی برای استفاده به عنوان اندازه گیری برای BA غیر BA استفاده شد. مسئله بهینه سازی خطی توجه داشته باشید که روش پیشنهادی برای کاربردهای دیگر به جز مثلث بندی هوایی نیز معتبر است. به عنوان مثال، نقاط LiDAR سه بعدی را می توان بین دو سیستم مختصات با استفاده از روش جهت گیری مطلق پیشنهادی تبدیل کرد.
این بخش استفاده از شش مجموعه داده شبیه سازی شده و یک مجموعه داده واقعی را گزارش می دهد که سناریوی زمین فتوگرامتری هوایی را برای ارزیابی دقت روش جهت گیری مطلق کلاسیک و روش پیشنهادی نشان می دهد. برای راحتی، نقاط سه بعدی در سیستم مرجع مختصات جهانی نقاط سراسری نامیده می شوند، در حالی که نقاط در سیستم مرجع مختصات محلی نقاط محلی نامیده می شوند.
4.1. مجموعه داده های شبیه سازی شده
برای یک برنامه مثلث بندی هوایی، روش جهت گیری مطلق به دنبال BA شبکه آزاد می تواند برای به دست آوردن مقداردهی اولیه برای راه حل BA با نقاط کنترل (BA-CP) استفاده شود. روش جهت گیری مطلق را می توان برای تبدیل نقاط اتصال سه بعدی و موقعیت های دوربین در سیستم مرجع مختصات محلی استفاده کرد تا اطمینان حاصل شود که پارامترهای ناشناخته اولیه برای BA-CP در سیستم مرجع مختصات جهانی قرار دارند.
گردش کار اصلی برای این شبیه سازی ها به شرح زیر توضیح داده شده است. هنگامی که نقاط تصویر از نقاط اتصال سه بعدی و GCP ها در دسترس هستند، این نقاط تصویر را می توان به یک مدل BA شبکه آزاد وارد کرد تا به طور همزمان جهت بیرونی (EO) دوربین و نقاط سه بعدی را با به حداقل رساندن اختلاف کل بین پیش بینی شده و بهینه سازی کند. نقاط تصویر اندازه گیری شده سپس نقاط سه بعدی مختلف مربوط به نقاط تصویر ورودی مثلثی می شوند. برای شبکه آزاد BA، مبدا سیستم مرجع مختصات اغلب به عنوان محل اولین دوربین تعریف می شود. بنابراین، این نقاط سه بعدی مثلثی باید در سیستم مرجع مختصات محلی قرار گیرند. اکنون مختصات محلی و جهانی GCPها مشخص شده است و بنابراین تخمین پارامتر تبدیل کامل شده است. سرانجام،
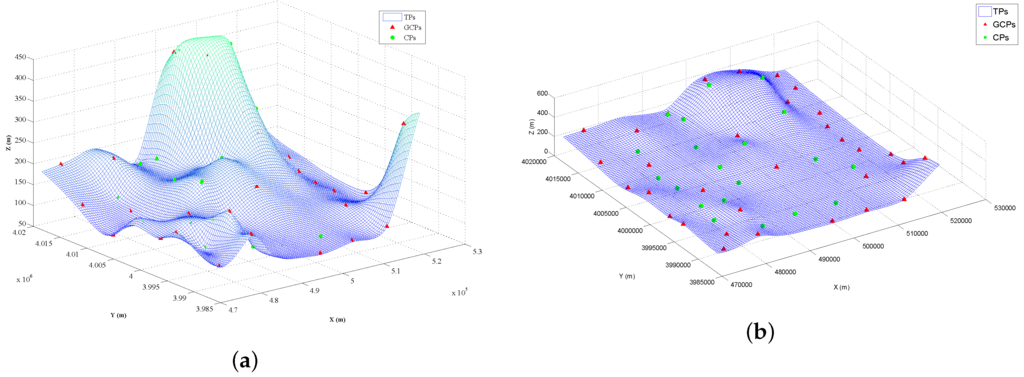
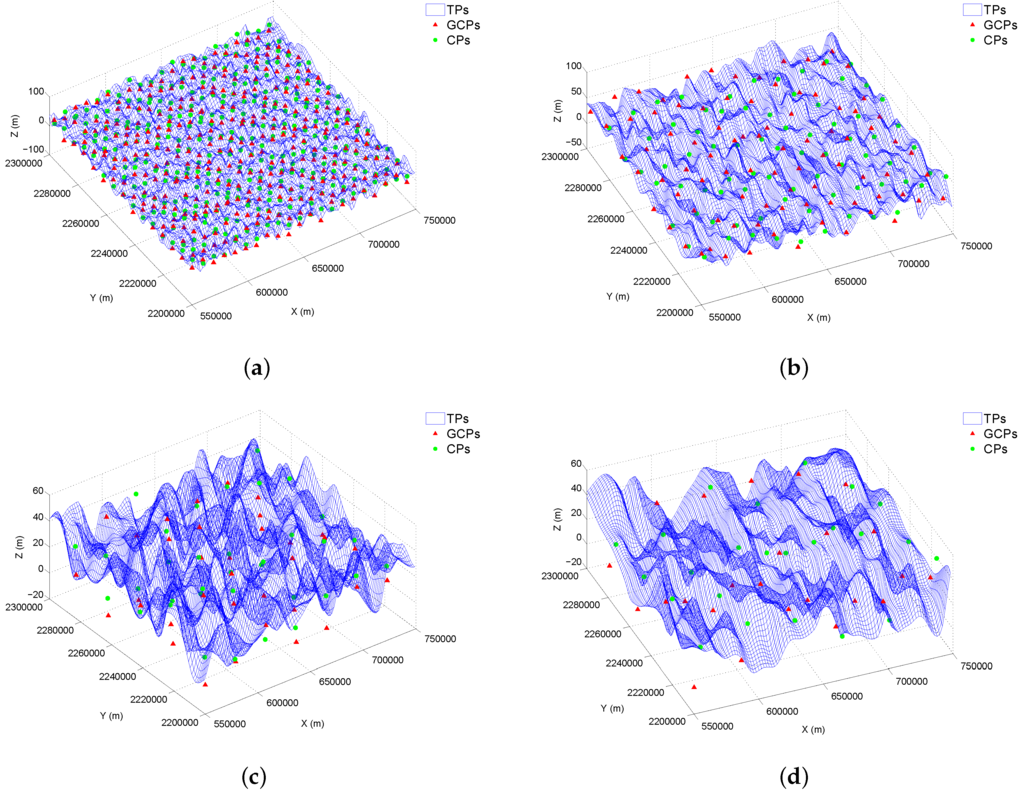
برای به دست آوردن نقاط تصویر دو بعدی، لازم است یک زمین مصنوعی با نقاط اتصال سه بعدی، GCP و CP در سیستم مرجع مختصات جهانی تولید شود. زمین های چهار مجموعه داده اول در جدول 1 با توپولوژی های دهکده مطابقت دارد که از ارتفاع 0 متر تا 50 متر متغیر است، همانطور که در شکل 5 نشان داده شده است . علاوه بر این، توپولوژیهای کوهستانی نیز در دادههای آزمایش شبیهسازی شدند، مطابق با آزمون 5 و آزمون 6، همانطور که در شکل 6 نشان داده شده است . حداکثر ارتفاع دو توپولوژی کوه به ترتیب تقریباً 300 متر و 500 متر است. تعداد GCP ها، CP ها و Tie Point ها به ترتیب در ستون های هشتم، نهم و دهم آمده است. در شکل 5 و شکل 6، GCP ها و CP ها به ترتیب با مثلث های قرمز و دایره های سبز نشان داده می شوند. هر دو GCP و CP به طور مساوی در سراسر منطقه مورد مطالعه توزیع شده اند، که شامل یک منطقه 200 کیلومتر × 100 کیلومتر است. علاوه بر این، صدای گاوسی σ= 5�=5میلی متر به مختصات پلانیمتری و ارتفاعی GCPs و CPs در تمام مجموعه داده های شبیه سازی شده اعمال شد. ستون دوم به ارتفاع پرواز اشاره دارد و مقیاس های نقشه برداری بر اساس فاصله کانونی ثابت 0.12 متر برای دوربین مورد استفاده محاسبه می شود. مناطق در نظر گرفته شده در شش مورد برابر هستند، همانطور که در ستون چهارم جدول 1 ذکر شده است .
برای تولید نقاط محلی سه بعدی زمانی که نقاط اتصال سه بعدی در سیستم مرجع مختصات جهانی در دسترس هستند، ابتدا نقاط تصویر دوبعدی به دست می آیند و سپس وارد مدل BA می شوند. استفاده از دوربینی با حداکثر وضوح تصویر 7680 × 13824 پیکسل که عاری از اعوجاج هندسی باشد فرض شده است. دوربین در ارتفاع پرواز مشخص شده قرار می گیرد تا هر دنباله ای از تصاویر هوایی تولید کند. همپوشانی های جلو و جانبی به ترتیب 60 و 30 درصد است. مسیرهای پرواز از پیش تعریف شده است، یعنی EO ها مشخص هستند. سپس، نقاط اتصال سه بعدی، GCP ها و CP ها را می توان بر روی فیلم های تصویری نمایش داد تا نقاط تصویر دو بعدی را بر اساس معادله هم خطی تشکیل دهند. این نقاط تصویر پیش بینی شده دارای خطای صفر هستند. برای واقعی تر کردن داده های شبیه سازی شده، مقداری نویز به نقاط تصویر پیش بینی شده اضافه می شود. اینجا، σ= 0 . 3�=0.3پیکسل ها به صورت تصادفی اضافه می شوند. این نقاط تصویر با نویز گاوسی به یک مدل شبکه آزاد BA وارد می شوند تا نقاط سه بعدی محلی را مثلث کنند. در اینجا، ParallaxBA [ 23 ] به عنوان مدل BA شبکه آزاد به دلیل عملکرد خوب آن، از جمله تخمین دقیق و نرخ همگرایی سریع، استفاده می شود.
عملکرد روش پیشنهادی از طریق مقایسه با نتایج روش کلاسیک ارزیابی و اعتبارسنجی شد. دقت CP به دست آمده در شش مجموعه داده شبیه سازی شده در جدول 2 ارائه شده است ، جایی که CAO و PAO به ترتیب به روش جهت گیری مطلق کلاسیک و روش جهت گیری مطلق پیشنهادی اشاره می کنند. ستون های سه تا شش نشان دهنده RMSE ها در جهت های x -، y – و z – هستند . روش پیشنهادی در مقایسه با روش کلاسیک، دقت بهبود یافته ای را برای همه مجموعه داده ها به همراه داشت. مثلاً هواپیما و zمقادیر RMSE برای تست 1، مربوط به ارتفاع پرواز 2500 متر، به ترتیب از 0.433 متر و 0.866 متر به 0.021 متر و 0.077 متر کاهش یافت که مربوط به افزایش در هواپیما و z است .دقت با فاکتورهای 21 و 11 به ترتیب. این افزایش دقت را می توان به در نظر گرفتن تغییر شکل بین دو سیستم مرجع مختصات نسبت داد که در روش کلاسیک به آن پرداخته نشده است. نویز در نقاط تصویر استخراج شده وجود دارد که باعث ایجاد خطا در نقاط مثلثی می شود. بنابراین، تغییر شکل زمین بازسازی شده بین سیستم های مرجع مختصات محلی و جهانی رخ می دهد. تبدیل کلاسیک بین دو سیستم مختصات از یک تبدیل جسم صلب استفاده میکند و فرض میکند که یک تبدیل تشابه واحد با هفت درجه آزادی میتواند به اندازه کافی تبدیل اجسام تغییر شکلیافته را نشان دهد. با این حال، این فرض نمی تواند به طور همزمان الزامات تبدیل برای دو جسم تغییر شکل یافته را برآورده کند. از این رو،
علاوه بر این، روش دیگری، BA-CP، برای مقایسه با روش های جهت گیری مطلق، همانطور که در جدول 2 نشان داده شده است، آزمایش شد . بدیهی است که BA-CP بهترین دقت را در بین سه روش نشان داد، اگرچه روش پیشنهادی فقط کمی ضعیفتر است. واضح است که برای مثلث بندی هوایی، روش BA-CP نمی تواند به طور کامل با روش جهت گیری مطلق جایگزین شود. با این حال، هدف اصلی این مقاله بهبود دقت تبدیل نقطه است که می توان با استفاده از روش جهت گیری مطلق کلاسیک به دست آورد.
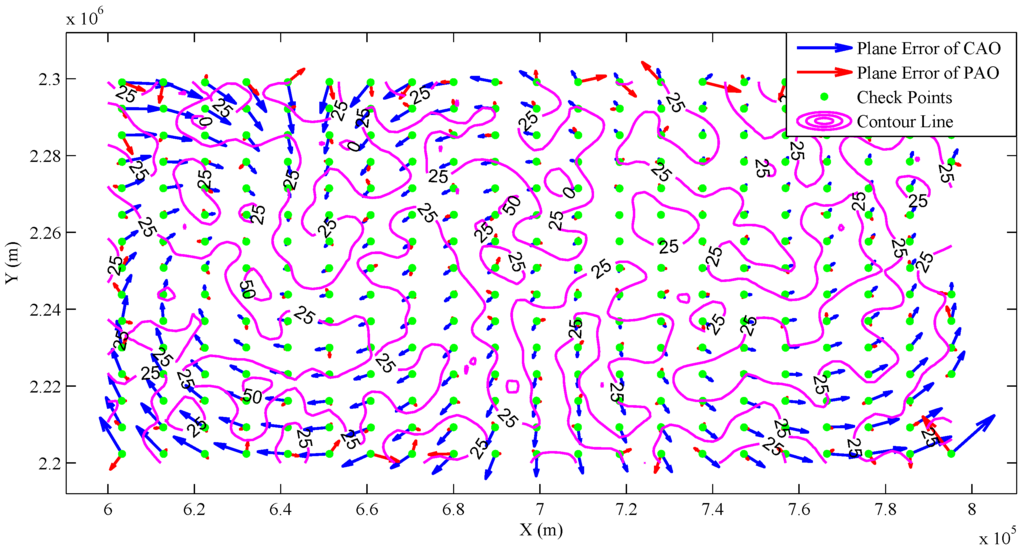
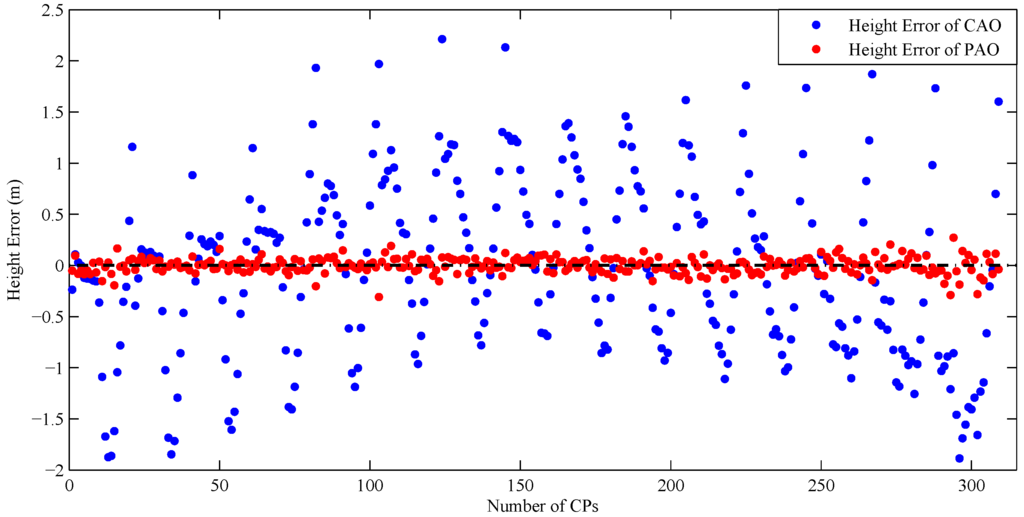
در نهایت، خطاهای CP در جهت های صفحه و z ارائه شده است تا توزیع خطا را نشان دهد. فقط خطاهای صفحه و z از تست 1 در شکل 7 و شکل 8 نشان داده شده است . مثلث های سبز و منحنی های بنفش در شکل 7 به ترتیب CP و خطوط کانتور را نشان می دهند. فلش های آبی و قرمز نشان دهنده جهت و بزرگی خطا هستند. محورهای افقی و عمودی به ترتیب با فاکتورهای 10000 و 100000 برای وضوح مقیاس بندی می شوند. توزیع خطای جهت z هر CP برای هر دو روش ارزیابی شد و نتایج در شکل 8 نشان داده شده است.. نقاط آبی و قرمز به ترتیب نشان دهنده خطاهای باقیمانده روش های کلاسیک و پیشنهادی هستند. شکل 7 و شکل 8 نشان می دهد که خطاهای صفحه و z روش پیشنهادی به طور کلی کوچکتر از خطاهای روش کلاسیک است.
زمان مصرف شده توسط روش های جهت گیری مطلق کلاسیک و پیشنهادی در جدول 3 ارائه شده است . کارایی روش پیشنهادی کمی ضعیفتر از روش کلاسیک است. دلیل اصلی این یافته این است که تنها یک مجموعه از پارامترهای تبدیل تشابه باید در روش کلاسیک محاسبه شود، در حالی که لازم است مجموعه های متعددی از پارامترهای تبدیل را با استفاده از رابطه (3) در روش پیشنهادی محاسبه کنیم.
4.2. مجموعه داده های واقعی
نقاط سهبعدی محلی و جهانی مجموعه دادههای واقعی مورد استفاده برای ارزیابی عملکرد روشهای جهتگیری مطلق، به روشی مشابه آنچه در بخش 4.1 توضیح داده شد، ایجاد شد . با این حال، بر خلاف در مورد مجموعه داده های شبیه سازی شده، نقاط تصویر دو بعدی را می توان با استفاده از فناوری استخراج ویژگی نقطه استخراج کرد.
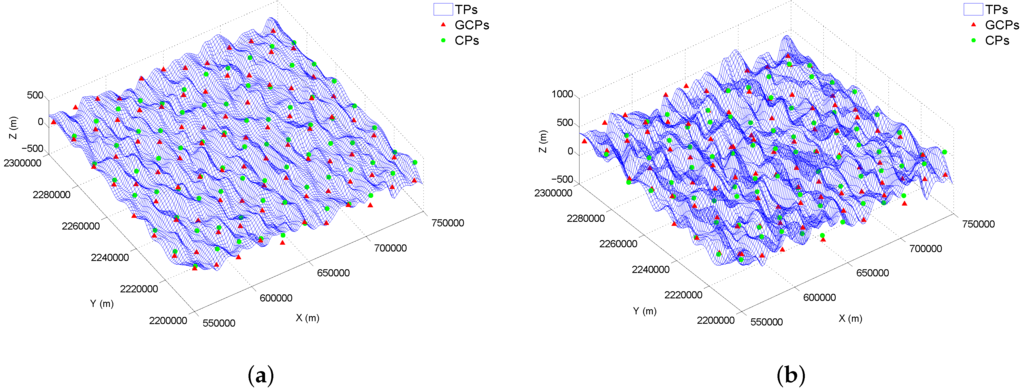
مجموعه داده های واقعی در نظر گرفته شده در اینجا شامل 737 تصویر سیستم دوربین نقشه برداری دیجیتال (DMC) است که در ارتفاع تقریباً 3500 متری گرفته شده و مساحتی به ابعاد 53 کیلومتر × 35 کیلومتر را در بر می گیرد. مقیاس نگاشت این مجموعه داده 1:30000 است. تصاویر بین 12 مسیر توزیع شده اند که همپوشانی های جلو و کناری به ترتیب 60 و 30 درصد است. پنجاه و دو نقطه سه بعدی در سیستم مرجع مختصات جهانی پکن-54 موجود است [ 24 ]. علاوه بر این، نقاط تصویر برای این نقاط سه بعدی نیز موجود است. سی و دو نقطه سه بعدی توزیع شده به طور مساوی به عنوان GCP انتخاب شدند و نقاط باقی مانده به عنوان CP در نظر گرفته شدند. مختصات سه بعدی GCP و CP توسط یک شرکت نقشه برداری و نقشه برداری تهیه شده است. دقت پلانیمتری آنها بهتر از ± 10±10میلی متر، در حالی که دقت ارتفاع اندازه گیری شده توسط بررسی تسطیح سنتی تا ± 5±5میلی متر توزیع های GCP و CP در شکل 9 نشان داده شده است .
یک الگوریتم استخراج ویژگی و تطبیق برای استخراج تداعیهای نقطه تصویر دوبعدی برای پیوند دادن تصاویر مجاور و ارائه محدودیتهایی برای مسئله بهینهسازی حداقل مربعات غیرخطی که با روش جهتگیری مطلق پرداخته شده است، استفاده شد. تبدیل ویژگی ثابت مقیاس ( L2�2الگوریتم -SIFT) [ 25 ] استفاده شد زیرا می تواند به طور موثر داده های فتوگرامتری هوایی در مقیاس بزرگ را پردازش کند. نقاط سه بعدی محلی را می توان در سیستم مرجع مختصات محلی بر اساس نقاط تصویر استخراج شده و نقاط تصویر سه بعدی که برای حل مسئله حداقل مربعات BA استفاده می شود، مثلث بندی کرد. مبدا مختصات معمولاً بر اساس دوربین اول تعریف می شود. این نقاط محلی سه بعدی مثلثی با پیوندهای نقطه تصویر ورودی مطابقت داشت. بنابراین، نقاط محلی مربوط به GCP ها و CP ها را نیز می توان به دست آورد.
بر اساس معیارهای تولید TIN نشان داده شده در شکل 3 ، ما تمام GCP ها را به زیر مجموعه های مثلث های TIN نامنظم متعدد تقسیم کردیم. برای هر مثلث TIN نامنظم، شباهت محلی را می توان با استفاده از سه جفت رئوس مثلث بهینه کرد. بنابراین، تعداد شباهت های محلی تخمین زده شده برابر با مثلث ها بود. برای دستیابی به تبدیل برای هر CP، شباهت جهانی CP را می توان با ترکیب همه شباهت های محلی بر اساس تابع توان که قبلا توضیح داده شد، تخمین زد. RMSEها در هر چهار جهت پس از تبدیل نقاط محلی به سیستم مرجع مختصات پکن-54 با استفاده از روش پیشنهادی، همانطور که در جدول 4 نشان داده شده است، ارزیابی شدند . ردیف دوم جدول 4نتایج را برای روش کلاسیک ارائه می دهد. RMSE های روش پیشنهادی در ردیف سوم ارائه شده است.
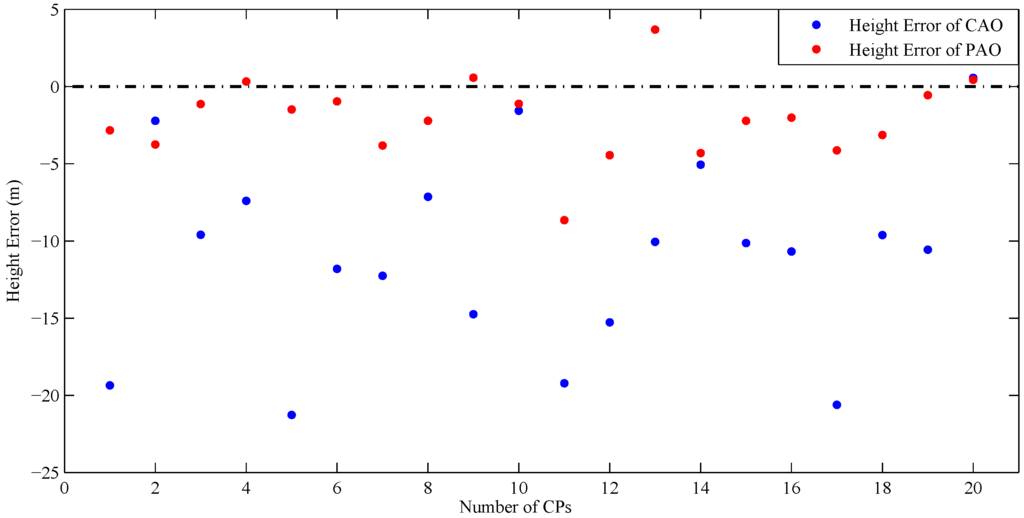
RMSE های جهت x -، y – و z روش پیشنهادی به ترتیب تقریباً دو، سه و سه برابر کوچکتر از روش کلاسیک بودند. توزیع خطای جهت سطح و z برای 22 CP در شکل 10 و شکل 11 نشان داده شده است ، جایی که خطاهای روش پیشنهادی مجدداً کمتر از روش کلاسیک است. در شکل 10 ، محورهای x و y با ضریب 5000 مقیاس بندی شده اند. مقدار زمان مصرف شده توسط روش جهت گیری مطلق کلاسیک و پیشنهادی به ترتیب 0.002 و 0.026 ثانیه بود.
مشابه با خلاصه تجربی ارائه شده در جدول 2 ، نتایج دو روش جهت گیری مطلق با روش BA-CP در جدول 4 مقایسه شده است . واضح است که دقت روش پیشنهادی بسیار نزدیک به BA-CP است.
4.3. تحلیل تاثیر شاخص قدرت-قانون بر دقت روش پیشنهادی
شاخص توان-قانون در معادله ( 6 ) نقش بسیار مهمی در تابع وزن دارد که بسته به فاصله بین CP و مثلث، وزن های مختلفی را به مثلث های مختلف اختصاص می دهد. در این بخش، تأثیر این شاخص قدرت-قانون بر دقت روش پیشنهادی بر اساس نتایج آزمایشها تحلیل میشود. در اینجا از چهار مجموعه داده اول در جدول 1 و مجموعه داده واقعی در جدول 2 استفاده شده است.
RMSE های صفحه و ارتفاع به دست آمده با استفاده از روش پیشنهادی زمانی که شاخص قانون توان روی 0، 3، 5، 7، 10، 20، 30، 40، 50، 60، 70، 80، 90 و 100 تنظیم شده است در جدول ذکر شده است . 5 . بعلاوه، RMSEهای صفحه و ارتفاع به عنوان تابعی از شاخص قدرت-قانون در شکل 12 رسم شده اند . زمانی که شاخص روی صفر تنظیم شود و وزن ها با استفاده از معادله محاسبه شوند، RMSE ها بسیار بزرگ هستند ( 6) همیشه یکی هستند. این بدان معنی است که وزن گیری تحت تأثیر فاصله بین CP و مثلث قرار نمی گیرد. این وضعیت از فرض اساسی روش پیشنهادی، یعنی اینکه یک مثلث نزدیکتر (در فاصله کمتر) باید سهم بیشتری در تبدیل یک CP داشته باشد، اطاعت نمی کند. با افزایش شاخص قدرت-قانون، دقت ها به طور مداوم بهبود می یابد، در درجه اول به این دلیل که مشارکت های بزرگتر و کوچکتر به ترتیب به مثلث های نزدیکتر و دورتر، زمانی که این پارامتر بزرگ است، اختصاص می یابد. با این حال، هنگامی که شاخص بسیار بزرگ می شود (به عنوان مثال، 70 برای مجموعه داده های شبیه سازی شده)، تبدیل شکست می خورد. دلیل اصلی این شکست این است که مخرج در معادله ( 6) به سمت بی نهایت میل می کند و باعث می شود وقتی شاخص توان-قانون بزرگ باشد وزن هر مثلث صفر می شود و در نتیجه نرمال سازی اوزان در رابطه ( 7 ) با شکست مواجه می شود زیرا مخرج نیز برابر با صفر می شود.
به طور خلاصه، هنگامی که شاخص قدرت-قانون روی 60 تنظیم می شود، بهترین دقت را می توان برای داده های ارائه شده در جدول 1 به دست آورد . بنابراین، شاخص قدرت-قانون 60 برای آزمایشهای بخش 4.1 و بخش 4.2 این مطالعه استفاده میشود.
5. نتیجه گیری ها
یک روش جهت گیری مطلق جدید برای تبدیل دقیق نقاط بین سیستم های مرجع مختصات محلی و جهانی (ژئودتیک) پیشنهاد شده است. تبدیل از چندین شباهت محلی به جای یک تبدیل شباهت واحد استفاده می کند. GCP ها بر اساس تولید یک TIN به زیر مجموعه های متعددی تقسیم می شوند. شباهت های محلی را می توان به صورت جداگانه با به حداقل رساندن تفاوت بین نقاط برازش شده و سه رأس یک مثلث تخمین زد. تحول جدید با ترکیب شباهت های محلی مختلف به دست می آید. نتایج نشان می دهد که x -، y – و zRMSE های جهتی را می توان با عواملی به بزرگی 22، 20 و 21، بر اساس مجموعه داده های شبیه سازی شده در ارتفاع 2500 متری، بهبود بخشید. علاوه بر این، برای یک مجموعه داده واقعی، این RMSE ها را می توان به ترتیب با عوامل تقریباً دو، سه و سه در مقایسه با روش کلاسیک کاهش داد. علاوه بر این، دقت هر دو روش جهت گیری مطلق کلاسیک و پیشنهادی با روش دیگری، BA-CP مقایسه می شود. واضح است که روش BA-CP را نمی توان با روش های جهت گیری مطلق به عنوان روشی که بهترین دقت را برای مثلث بندی هوایی ارائه می دهد جایگزین کرد. با این حال، برای کاربردهای دیگری که در آنها نقاط تصویر در دسترس نیست، روش BA-CP شکست خواهد خورد، و روش پیشنهادی میتواند راهحلی امکانپذیر برای تبدیل نقطه ارائه کند.
در حال حاضر، تعیین خودکار شاخص توان-قانون بهینه یک کار پیچیده است. کار آینده در درجه اول بر چگونگی تعیین دقیق این پارامتر متمرکز خواهد بود.








بدون نظر