

خلاصه
این مقاله اولین نتایج یک مکان مبتنی بر تشخیص تصویر (IRBL) را برای یک برنامه کاربردی تلفن همراه با تمرکز بر رویهای برای تولید پایگاه داده از تصاویر محدوده (RGB-D) توصیف میکند. در یک محیط داخلی، برای تخمین موقعیت و جهت گیری دوربین، دانش فضایی قبلی از محیط اطراف مورد نیاز است. برای دستیابی به این هدف، یک بررسی سه بعدی کامل از دو محیط مختلف (ایستگاه متروی Bangbae سئول و ساختمان موسسه تحقیقات الکترونیک و مخابرات (ETRI) در Daejeon، جمهوری کره) با استفاده از ابزار LiDAR (تشخیص نور و محدوده) انجام شد. و اسکن های به دست آمده برای به دست آوردن یک مدل فضایی از محیط ها پردازش شدند. از این، دو پایگاه داده از تصاویر مرجع با استفاده از نرم افزار خاص ساخته شده توسط گروه Geomatics از Politecnico di Torino (ScanToRGBDImage) تولید شد. این ابزار به ما اجازه میدهد تا تصاویر RGB-D متفاوتی را به صورت مصنوعی تولید کنیم که در هر موقعیت اسکن در محیط قرار دارند. بعداً پارامترهای خارجی (X, Y, Z, ω, نوع گره ناشناخته: فونتنوع گره ناشناخته: فونت، و κ) و اطلاعات محدوده استخراج شده از تصاویر پایگاه داده بازیابی شده به عنوان اطلاعات مرجع برای تخمین وضعیت مجموعه ای از تصاویر موبایل به دست آمده در روش IRBL استفاده می شود. در این مقاله، عملیات بررسی، رویکرد تولید تصاویر RGB-D و استراتژی IRB گزارش شده است. در نهایت، تجزیه و تحلیل نتایج و آزمون اعتبار سنجی شرح داده شده است.
کلید واژه ها:
مکان پایگاه های تشخیص تصویر ; موقعیت یابی داخلی ؛ تصاویر RGB-D ؛ LiDAR ; پایگاه داده ; محاسبات تلفن همراه ; بازیابی تصویر

چکیده گرافیکی
1. معرفی
در سالهای اخیر، سرویسهای مبتنی بر مکان (LBS) که از دادههای بهدستآمده از حسگرهای دستگاههای تلفن همراه برای ارائه موقعیت، ناوبری، ردیابی و آگاهی از اجسام و افراد متحرک استفاده میکنند [1، 2، 3]، به عوامل مهمی در چندین تحقیق تبدیل شدهاند . مطالعات انجام شده توسط جامعه علمی و همچنین از صنعت. گسترش روزافزون و قدرت محاسباتی تلفنهای همراه، با افزایش اتصال دستگاهها، امکان توسعه برنامههای جدید اینترنت اشیا (IoT) را در بسیاری از زمینههای جالب، مانند مراقبتهای پزشکی [4]، زندگی به کمک محیط [5]، محیط زیست فراهم کرده است . نظارت [ 6 ]، حمل و نقل [ 7]، بازاریابی [ 8 ] و غیره. همه این خدمات نیازمند موقعیت یابی دقیق برای مکان یابی افراد، کالاها، وسایل نقلیه، حیوانات و دارایی ها هستند. موقعیت یابی سیستم ماهواره ای ناوبری جهانی (GNSS) دقت خوبی را فقط در مناطق باز ارائه می دهد، اما زمانی که این عملکرد در یک فضای داخلی یا دره شهری منتقل می شود، سیگنال GNSS از بین می رود و لازم است با یکپارچه سازی این موضوع بر این مشکل غلبه کرد. تکنیک ها و سنسورهای مختلف در سالهای اخیر، برخی از LBSها با استفاده از ادغام فنآوریهای مختلف و روشهای اندازهگیری پیشنهاد شدهاند [ 1 ]. دوربینها [ 9 ، 10 ، 11 ]، مادون قرمز (کینکت)، اولتراسوند [ 12 ]، WLAN/WiFi [ 13 ]، RFID [ 14]]، ارتباطات سیار [ 15] و غیره نمونه هایی از فناوری هایی هستند که جامعه علمی در خدمت مکان های داخلی قرار داده است. همه این سیستم های موقعیت یابی دارای مزایا و معایبی هستند که آنها را در سناریوهای خاص در مقایسه با سایر گزینه ها مفیدتر می کند. تمام فناوریهایی که از فرکانسهای رادیویی بهعنوان یک کمیت فیزیکی برای تعریف مکان استفاده میکنند، مسائل مشترکی با ضرورت خط دید (LOS)، خرابی نویز سیگنال، و مشکلات انتشار و چند مسیره دارند. علاوه بر این، هزینه این سیستم های موقعیت یابی به دلیل زیرساخت های لازم می تواند بسیار گران باشد. LBS های مبتنی بر حسگر دوربین دارای مزایای قوی هستند و نیازی به نصب هیچ شبکه ای از چیپست ها در محیط ندارند. همه حسگرهای اولیه از قبل در دستگاه کاربر نصب شده اند. در این مورد، سیستم را می توان کم هزینه در نظر گرفت. علاوه بر این، دقت موقعیت یابی با این سیستم ها معمولاً در مقایسه با سایر سیستم ها دقیق تر است. علاوه بر این، اکثر این سیستم ها نمی توانند جهت گیری کاربر را تعیین کنند، با محدودیت های مهم برای پشتیبانی از بسیاری از برنامه های کاربردی مانند واقعیت افزوده.
این سناریو نشاندهنده علاقه ما به سیستمهای موقعیتیابی داخلی است که بهعنوان حسگرهای منحصربهفرد مانند آنهایی که در تلفنهای هوشمند روزمره یافت میشوند، استفاده میشوند، و توجه ما بر محیطهایی با زندگی متراکم متمرکز است که میتوانند مشکلات حیاتی داشته باشند.
این مقاله به پروژه ای مرتبط است که توسط Politecnico di Torino (ایتالیا) و موسسه تحقیقات الکترونیک و مخابرات (ETRI، جمهوری کره) با هدف تحقق یک روش مکان مبتنی بر تشخیص تصویر (IRBL) مفید برای تخمین موقعیت انجام شده است. و جهت گیری یک تصویر گرفته شده توسط یک دستگاه تلفن همراه از طریق استخراج اطلاعات سه بعدی از یک تصویر مرجع. هدف آن تخمین موقعیت کاربر از طریق گوشی هوشمندی است که تصویری از محیط به دست میآورد و از پایگاه داده در سروری که در آن تصاویر با اطلاعات سه بعدی ذخیره میشود، پرس و جو میکند. تصاویر پایگاه داده تصاویر مصنوعی RGB-D هستند که توسط یک مدل سه بعدی دقیق از محیط استخراج شده اند. مدل سهبعدی میتواند از یک اکتساب تشخیص نور و محدوده (LiDAR)، از یک مدل سهبعدی CityGML، از ساختاری از بازسازی حرکت به دست آید. از دوربین زمان پرواز (ToF)، یا دستگاهها یا تکنیکهای دیگر. این رویکرد میتواند جزء یک راهحل ناوبری ترکیبی با دادههای واحد اندازهگیری اینرسی (IMU) باشد [16 ، 17 ، 18 ].
این پروژه هنوز در حال انجام است و در حال حاضر تایید اولین نتایج به دست آمده در دو سایت آزمایشی انجام شده است: ایستگاه مترو Bangbae در سئول و ساختمان تحقیقات ETRI در Daejeon. اساس رویه IRBL تطبیق بین هر یک از تصاویر گوشی هوشمند به دست آمده در زمان واقعی و یک تصویر سه بعدی تولید مصنوعی متناظر است که توسط یک پایگاه داده (DB) استخراج شده و همه در یک روش خودکار پیاده سازی شده اند. در بخش های بعدی، کل گردش کار توضیح داده خواهد شد. الگوریتمهای توسعهیافته مورد تجزیه و تحلیل قرار خواهند گرفت و شرح کاملی از فعالیتهای انجام شده در سایتهای آزمایشی با اعتبارسنجی گزارش خواهد شد. شکل 1این روش را با مراحل متوالی توصیف می کند: جمع آوری داده های سه بعدی با ابزار LiDAR، تولید مدل سه بعدی، پایگاه داده تحقق تصویر RGB-D، بازیابی تصویر با MPEG7 Compact Descriptor for Visual Search (CDVS) و برنامه های کاربردی الگوریتم IRBL برای تثبیت موقعیت. در بخشهای بعدی، توجه به جمعآوری دادهها و تولید DB تصویر RGB-D بهعنوان بخش اساسی برای کاربرد صحیح این روش متمرکز خواهد شد.
2. وضعیت هنر
همانطور که در بالا گفته شد، در تحقیق مربوط به سنسورهای روی گوشی هوشمند، به ویژه در این مرحله از تحقیق، تنها دوربین مورد تجزیه و تحلیل قرار گرفت. بررسی ادبیات سیستم های نوری برای موقعیت یابی داخلی توسط Mautz و Tilch در سال 2011 منتشر شده است [ 19]]. همه سیستمهای موقعیتیابی مبتنی بر دوربین با تعریف موقعیت و چرخش در دنیای سهبعدی سروکار دارند، زمانی که مشاهدات اولیه یک موقعیت دوبعدی روی حسگر دوربین است. اطلاعات عمق را می توان با حرکت دوربین به دست آورد یا می توان مستقیماً با سنسورهای اضافی مانند اسکنر لیزری اندازه گیری کرد. در رویکرد اول نمی توان مقیاس سیستم را تعیین کرد و نیاز به یک راه حل جداگانه دارد. تبدیل از فضای تصویر به فضای جسم و این نیاز به اطلاعات فاصله دارد. اگر از یک سیستم دوربین استریو با خط مبنا مشخص استفاده شود، مقیاس را می توان از روی تصاویر استریوسکوپی تعیین کرد. از طرف دیگر، فاصله ها را می توان با سنسورهای اضافی مانند اسکنر لیزری یا دوربین های تصویربرداری برد اندازه گیری کرد.
مطالعات تحقیقاتی بسیاری در زمینه بومیسازی مبتنی بر تصویر داخلی وجود دارد که اهداف متفاوتی را دنبال میکنند و از روشها و فناوریهای متفاوتی نیز در کارکرد حوزه مورد علاقه گروههای پژوهشی استفاده میکنند. جامعه رباتیک بر رویکردهای کیلومتر شماری بصری [ 20 ] و نقشه برداری همزمان و مکان (SLAM) [ 21 ، 22 ] تمرکز کرده است، در حالی که سایر گروه های مرتبط با ژئوماتیک و گرافیک در حال بررسی ویژگی های معنایی [ 23 ] یا ساختار از حرکت هستند.
برخی از کارهای جالب از الگوریتم بینایی کامپیوتر و به ویژه شبکه عصبی و انتقال یادگیری برای موقعیتیابی و طبقهبندی بصری داخل ساختمان استفاده میکنند [ 3 ]. برخی از تصاویر RGB-D برای انجام تشخیص شی استفاده می کنند [ 24 ]. سایر محققان از دوربین های همه جهته برای ایجاد پایگاه داده نقشه تصویر برای پرس و جو استفاده می کنند [ 25 ]. در مورد استفاده از تلفن هوشمند به عنوان یک دستگاه ناوبری، برخی تحقیقات جالب را می توان در [ 26 ، 27 ، 28 ، 29 ] یافت.
هدف اصلی پروژه مربوط به این مقاله، بررسی و توسعه یک راه حل موقعیت یابی کم هزینه در یک محیط داخلی است که بتواند موقعیت و جهت گیری دوربین را با دقت بالا، از طریق پایگاه داده ای از تصاویر مصنوعی با وضوح بالا که از یک محیط بسیار تولید شده است، تعریف کند. مدل سه بعدی دقیق نمونه هایی را می توان در تحقیقات لیانگ و همکارانش یافت. [ 10 ]، جایی که بومی سازی مبتنی بر تصویر با استفاده از کوله پشتی انجام شده است که اطلاعات قاب و عمق را به طور همزمان برای تولید پایگاه داده ای از تصاویر مرجع به دست می آورد. این کار به دلیل وضوح پایین تصاویر و روش ایجاد پایگاه داده با تحقیق ما متفاوت است.
بدیهی است که این روشها به اطلاعات قبلی نیاز دارند، اما امروزه با گسترش ابزارها و تکنیکهای جدید پیمایشی مانند فتوگرامتری، LiDAR و سیستمهای نقشهبرداری متحرک، اطلاعات ساختار سهبعدی محیطهای بزرگ را میتوان به سرعت به دست آورد (به عنوان سرریز مثبت) یک مدل سه بعدی دقیق که می تواند همیشه برای ارتقاء بیشتر در دسترس باشد و برای کارهای جانبی قابل استفاده باشد.
3. روش شناسی
روش پیشنهادی برای IRBL بر سه مولفه اساسی استوار است:
-
تحقق DB تصویر برای توصیف ناحیه شی: این DB از هزاران تصویر ضبط شده در قالب تصاویر RGB-D استفاده می کند.
-
یک فناوری جستجوی بصری: در این مطالعه، CDVS که توسط TELECOM Italia ثبت شده است، برای شناسایی تصویر مرجع استخراج شده از DB تصویر که شبیه به یک تصویر پرس و جو است (که توسط کاربر با گوشی هوشمند به دست آمده است) استفاده شده است.
-
یک الگوریتم پیشنهادی برای IRBL: این الگوریتم مبتنی بر دنبالهای از تطبیق ویژگی و رد پرت قوی است که میتواند مجموعهای از ویژگیهای دو بعدی، نقاط همولوگ بین تصاویر مرجع و پرس و جو را استخراج کند. این ویژگیهای دو بعدی را میتوان با استفاده از دادههای RGB-D برای رد فضای فتوگرامتری نهایی به سه بعدی تبدیل کرد.
3.1. تولید پایگاه داده تصویر RGB-D
تصویر RGB-D یک تصویر دیجیتال کلاسیک RGB با پارامترهای جهت گیری داخلی و خارجی شناخته شده است که در آن فاصله بین مرکز طرح ریزی و اشیاء به دست آمده برای هر پیکسل ثبت می شود. بنابراین، مقادیر فاصله در یک ماتریس اضافی با اندازه پیکسل، تعداد ستونها و تعداد ردیفهای مشابه ماتریس RGB ذخیره میشوند. اطلاعات رادیومتریک اضافی مانند NIR، MIR، TIR، باندهای چندطیفی یا ابرطیفی را میتوان در سطوح ماتریس دیگر اضافه کرد و به این ترتیب تصویر جدیدی را تعریف کرد که نویسندگان میتوانند آن را به عنوان RGB-D تعریف کنند. شکل 2 شامل طرحی از ساختار RGB-D است. با تولید یک پایگاه داده از RGB-D یک محیط داخلی، امکان نمایش صحیح واقعیت وجود دارد.
برای تولید خودکار یک DB از تصاویر RGB-D، یک مدل سه بعدی واقع گرایانه از ناحیه مورد نظر، با اطلاعات هندسی و رنگی، به عنوان داده ورودی مورد نیاز است. این مدل می تواند از یک مدل سه بعدی موجود استخراج شود، که توسط یک بررسی زمینی یا هوایی تولید شده است، یا از طریق یک سیستم نقشه برداری متحرک به دست آید. هنگامی که مدل سه بعدی تولید شد، تصاویر RGB-D را می توان به طور خودکار با استفاده از نرم افزار ScanToRGBDImage که توسط گروه Geomatics در Politecnico di Torino توسعه یافته است، مشاهده کرد.
این نرم افزار می تواند یک تصویر RGB-D ایجاد کند که باید حاوی اطلاعات زیر باشد:
- –
-
پارامترهای جهت گیری خارجی مربوط به موقعیت و جهت دوربین (X 0 , Y 0 , Z 0, ω, φ و κ) که از موقعیت ابر نقطه مشتق شده اند.
- –
-
پارامترهای جهت گیری داخلی مربوط به فاصله کانونی، موقعیت نقطه اصلی دوربین (f، ξ 0 و η 0 ) و اعوجاج ها (تصاویر تولید شده مصنوعی هستند و بدون اعوجاج در نظر گرفته می شوند).
- –
-
تعداد پیکسل ها در ستون ها و ردیف های RGB-D (n ردیف و n col ) و اندازه پیکسل تصویر d pix .
به عنوان پارامترهای ورودی، برنامه محقق شده به فاصله کانونی تصاویری که محقق می شوند، n ردیف و n ستون ، اندازه پیکسل تصاویر تولید شده و تعداد تصاویری که باید بر اساس عمودی (nV) استخراج شوند، نیاز دارد. و مراحل افقی (nH) ( شکل 3 ).
هنگامی که پارامترهای ورودی ثابت شدند، فرآیند مراحل بعدی [ 30 ] را اجرا می کند:
-
یک تصویر خالی (سطوح ماتریس RGB و محدوده) با استفاده از (n col , n row ) تولید می شود.
-
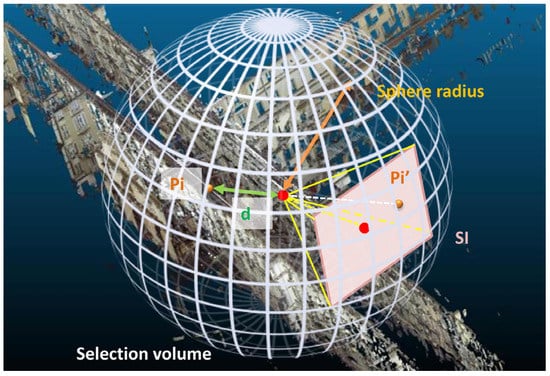
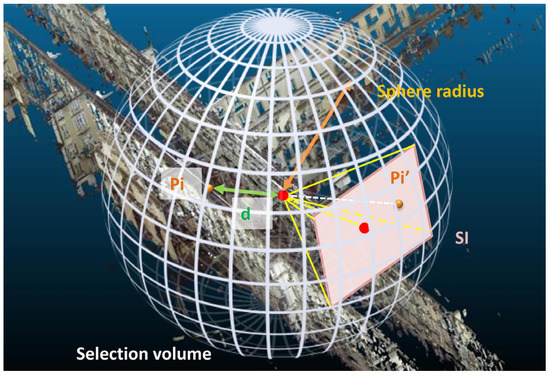
زیرمجموعه ای از نقاط رنگی (X i ، Y i ، Z i ) با i = 1:n، (n = تعداد نقاط انتخاب شده) را می توان از ابر نقطه RGB اصلی با توجه به حجم انتخابی که می تواند توسط یک تعریف شود استخراج کرد. بخش یک کره ( شکل 4 ) با:
-
مرکز در محل تصویر RGB-D تولید شده؛
-
جهت محور با محور نوری تصویر مصنوعی منطبق است.
-
شعاع R؛ و
-
دامنه تعریف شده توسط یک زاویه (≤90 درجه) که نیمی از زاویه مخروط اندازه گیری شده از محور جهت است.
-
-
برای هر نقطه رنگی انتخاب شده، فاصله d i نسبت به محل تصویر تولید شده محاسبه می شود:دمن=(ایکسمن–ایکس0)2+(Yمن–Y0)2+(زمن–ز0)2–––––––––––––––––––––––––––––√��=(��−�0)2+(��−�0)2+(��−�0)2
-
هر نقطه RGB انتخاب شده بر روی تصویر مصنوعی نمایش داده می شود که مختصات تصویر آن (ξi ، ηi ) را با استفاده از پارامترهای جهت گیری داخلی و خارجی در داخل معادلات هم خطی مشخص می کند:ξ=ξ0– جr11( X–ایکس0) +r21( Y–Y0) +r31( Z–ز0)r13( X–ایکس0) +r23( Y–Y0) +r33( Z–ز0)�=�0–ج�11(ایکس–ایکس0)+�21(�–�0)+�31(ز–ز0)�13(ایکس–ایکس0)+�23(�–�0)+�33(ز–ز0)η=η0– جr12( X–ایکس0) +r22( Y–Y0) +r32( Z–ز0)r13( X–ایکس0) +r23( Y–Y0) +r33( Z–ز0)�=�0–ج�12(ایکس–ایکس0)+�22(�–�0)+�32(ز–ز0)�13(ایکس–ایکس0)+�23(�–�0)+�33(ز–ز0)
جایی که (r11،r12،r13،r21،r22،r2 ، 3،r31،r32،r33)(�11،�12،�13،�21،�22،�2،3،�31،�32،�33)ضرایب یک ماتریس چرخش فضایی 3×3 بسته به نگرش دوربین است. ( ω ، ϕ ، K)(�،�،ک).
آرω ϕ κ=⎛⎝⎜cos ϕ cos κcos ω s e n κ + s e n ω s e n ϕ cos κs e n ω s e n κ – cos ω s e n ϕ cos κ– cos ϕ s e n κcos ω cos κ − s e n ω s e n ϕ s e n κs e n ω cos κ + cos ω s e n ϕ s e n κs e n ϕ− s e n ω cos φcos ω cos ϕ⎞⎠⎟آر���=(cos�cos�–cos�سه��سه��cos�سه��+سه��سه��cos�cos�cos�–سه��سه��سه��–سه��cos�سه��سه��–cos�سه��cos�سه��cos�+cos�سه��سه��cos�cos�) -
مختصات تصویر (ξ i , η i ) با استفاده از :جمن=ξمندp i x+nc o l2جمن=�مندپمنایکس+�ج�ل2rمن= –ηمندp o x+nr o w2�من=–�مندپ�ایکس+����2
-
مقادیر RGB هر نقطه در داخل سلول های ماتریس تصویر در موقعیت (c i , r i ) نوشته می شود.
-
مقدار فاصله d i در داخل سلول ماتریس تصویر محدوده در موقعیت (c i , r i ) نوشته می شود.
در پایان این روش، پیکسلهایی که هنوز خالی هستند، با استفاده از یک الگوریتم درونیابی بر اساس نزدیکترین پیکسلهای پر شده پر میشوند.
پس از این فرآیند، ScanToRGBDImage مجموعه ای از تصاویر مصنوعی را با اطلاعات مربوط به موقعیت و نگرش تولید می کند، به عنوان مثال، پایگاه داده تصاویر RGB-D.
شکل 5 نمونه ای از مجموعه ای از تصاویر RGB-D متصل به موقعیت اسکن در ایستگاه مترو Bangbae را نشان می دهد (X = 322,920.858، Y = 4,150,175.414، Z = 45.967 در متر—UTM-WGS84، 52S).
3.2. جستجوی تصویری توصیفگر فشرده
هدف از روش بازیابی، انتخاب یک تصویر مرجع از DB تصویر با بالاترین سطح شباهت با تصویر به دست آمده توسط دوربین گوشی هوشمند، هدف روش موقعیت یابی است. برای روش بازیابی، راه حل اتخاذ شده توسط MPEG7 CDVS [ 31 ] با بهینه سازی جزئی تعریف می شود. برای انتخاب شبیه ترین تصویر از یک DB، عملیات زیر توسط MPEG7-CDVS تعریف شده است:
-
توصیفگرهای محلی در تصاویر کوئری و پایگاه داده استخراج و فشرده می شوند.
-
تصاویر به طور مقدماتی بر اساس نمرات شباهت توصیفگر جهانی [ 32 ] بین تصویر پرس و جو رتبه بندی می شوند. توصیفگرهای جهانی نمایشی آماری از مجموعه ای از مهمترین توصیفگرهای محلی استخراج شده از دو تصویر را ارائه می دهند. در نتیجه غربالگری اولیه توصیفگر جهانی، چندین تصویر بالقوه مشابه از DB انتخاب میشوند.
-
برای بهترین تصاویر انتخاب شده توسط آزمون تشابه توصیفگر جهانی، رویه تطبیق زوجی بین نقاط کلیدی استخراج شده در چند تصویر اجرا می شود و سعی می شود نقاط کلیدی مشابه موجود در هر دو تصویر مطابقت داده شود. برای هر توصیفگر ویژگی تصویر پرس و جو، یک و تنها یک توصیفگر ویژگی مشابه در هر بخش تصویر واحد از DB جستجو می شود.
-
نقاط کلیدی تطبیق داده شده از طریق بررسی هندسه بر اساس این مفهوم تأیید می شوند که ویژگی های آماری نسبت فاصله ورود به سیستم برای جفت تطابق نادرست به طور مشخص با ویژگی های مربوط به تطابق صحیح متفاوت است.
بر اساس یک مدل آماری، مجموعهای از تطابقهای خوب را میتوان با استفاده از یک امتیاز شباهت بهصورت زیر رتبهبندی کرد:
- 5.
-
تعداد نقاط کلیدی زوجی صحیح از بررسی انسجام نسبت فاصله (DISTRAT). و
- 6.
-
قابلیت اطمینان هر تطابق انتخاب شده توسط نسبت فاصله بین اولین و دومین توصیفگر نزدیک شناسایی شده در تصویر مرجع داده می شود.
با توجه به تعداد زیاد تصاویر در DB، برای سرعت بخشیدن به فرآیند بازیابی، CDVS از توصیفگرهای فشرده استفاده می کند [ 33]]. به همین دلیل، تنها تعداد محدودی از نکات کلیدی در روند جستجوی تصویر استفاده می شود. علاوه بر این، CDVS به نقاط واقع در مرکز تصویر اولویت بیشتری می دهد. بدیهی است که در برخی از نمایهای رایج، مرکز تصویر نشاندهنده نقطه بینهایت نمای آیندهنگر است، بنابراین نقاط انتخابشده میتوانند از دوربین دورتر باشند، که باعث از دست دادن دقت در مرحله بعدی مکان میشود. برای افزایش سطح دقت روش مکان یابی، معیارهای رتبه بندی و انتخاب نقاط کلیدی باید اصلاح شود. نیاز به توزیع همگن نقاط کلیدی در تصویر کلی وجود دارد، بدون اولویت دادن به نقاط متمرکز در مرکز تصویر.
3.3. الگوریتم مکان مبتنی بر تشخیص تصویر
پس از اتمام بازیابی تصویر مرجع، می توان اطلاعات سه بعدی ویژگی های انتخاب شده را از تصویر استخراج کرد تا پارامترهای خارجی (موقعیت و نگرش) تصویر پرس و جو را تخمین بزند. در جزئیات، اطلاعات سه بعدی تصویر مرجع در داخل DB تصاویر RGB-D ذخیره می شود که در آن، برای هر پیکسل، فاصله (محدوده) مانع نشان داده شده در تصویر، همراه با پارامترهای جهت گیری داخلی و خارجی (IO) گزارش می شود. /EO). پس از استخراج تصویر مرجع، نکات کلیدی و ویژگی های مرتبط با استفاده از یک راه حل پیشرفته از پرس و جو و تصویر مرجع استخراج می شوند [ 34] .] که امکان ارتباط اولیه بین نقاط کلیدی دو تصویر را فراهم می کند. پس از آن، درصد بالایی از رد نقاط پرت طبق یک رویکرد دو مرحلهای پیشنهادی جدید اجرا میشود. در ابتدا، منطبقات خوب با استفاده از الگوریتم DISTRAT [ 35 ، 36 ، 37 ] با استفاده از یک بررسی هندسی بر اساس نسبت های فاصله بین جفت نقاط در دو تصویر تحلیل شده انتخاب می شوند. سپس، یک بررسی تصادفی نمونه توافقی (RANSAC) بر روی مجموعه ای از مسابقات بهبود یافته با کیفیت اجرا می شود. رویکرد رد دور پیشنهادی، زمانی که برای شرایط کاری واقعی اعمال شود، زمان پردازش را با توجه به استفاده از رویکرد استاندارد RANSAC 10 برابر کاهش میدهد [ 38] .]. در نهایت، پارامترهای دوربین بر اساس اطلاعات سه بعدی موجود در تصویر مرجع برای مجموعه انتخاب شده از جفت نقطه کلید با توجه به معادلات همخطی [ 39 ] برآورد میشوند.
برای تجزیه و تحلیل جزئیات پردازش، لیست بعدی هر مرحله از الگوریتم IRBL را مشخص می کند:
-
استخراج ویژگی ها از تصاویر پرس و جو و مرجع با استفاده از آشکارساز تبدیل ویژگی تغییر ناپذیر مقیاس (SIFT) [ 40 ].
-
رویه تطبیق نقطه کلید که در آن تنها نقاط کلیدی تصویر پرس و جو که دارای یک و تنها یک توصیفگر مشابه در بین نقاط کلیدی در تصویر مرجع هستند، با توجه به رویکرد پیشنهادی در [34] کمی تغییر یافته انتخاب می شوند.
-
چک هندسی (DISTRAT) برای رد اولیه درشت نقاط پرت منطبق استفاده می شود، استفاده از DISTRAT برای تسریع روند رد نقاط پرت مورد نیاز است.
-
با توجه به مجموعه ای از ویژگی های مشترک انتخاب شده از بررسی هندسی DISTRAT، ماتریس اساسی بین تصویر پرس و جو و تصویر مرجع با رویه RANSAC تخمین زده می شود که امکان حذف موارد پرت باقی مانده از بررسی DISTRAT را فراهم می کند. RANSAC یک روش تکراری قوی برای تخمین پارامترهای یک مدل ریاضی از مجموعه ای از داده های مشاهده شده است که حاوی مقادیر پرت است، زیرا در خروجی DISTRAT، درصد کمی از نقاط پرت در مجموعه انتخاب شده از ویژگی های مشترک وجود دارد. RANSAC یک الگوریتم غیر قطعی است به این معنا که نتیجه معقولی را تنها با یک احتمال مشخص تولید می کند، با این احتمال که با تکرار بیشتر مجاز باشد، این احتمال افزایش می یابد. استفاده اولیه از DISTRAT درصد نقاط پرت را از 70 درصد به تنها چند درصد کاهش می دهد.
-
ویژگی های مشترک بین پرس و جو و تصویر مرجع با استفاده از تصویر RGB-D که از مدل سه بعدی سه بعدی صحنه به دست می آید، به اطلاعات سه بعدی تبدیل می شود.
-
برای بهبود پارامترهای جهت گیری خارجی و داخلی اولیه تصویر پرس و جو، یک تبدیل خطی مستقیم (DLT) را می توان با استفاده از ویژگی های سه بعدی استخراج شده در مرحله قبل برآورد کرد [ 42 ].
-
رد نقاط پرت که توسط مراحل 3 و 4 شناسایی نشدهاند، توسط یک فرآیند جاسوسی داده پردازش میشوند [ 43 ]. برای 11 تخمین DLT داده شده، باقیمانده های پس از تناسب بر حسب فاصله بین طرح نقطه جامد در جفت تصویر پرس و جو و مختصات نقطه کلید منطبق محاسبه می شوند. اگر بزرگترین باقیمانده از یک آستانه فراتر رود، بدترین نقطه کنار گذاشته می شود و پارامترهای DLT دوباره تخمین زده می شوند.
-
با استفاده از معادلات همخطی در تخمین حداقل مربعات، پارامترهای EO پالایش می شوند [ 39 ، 42 ].
قابلیت اطمینان مکان تخمینی نهایی را می توان با استفاده از ماتریس کوواریانس واریانس تعدیل حداقل مربعات [ 44 ] تایید کرد و در برابر باقیمانده های پس از برازش بررسی کرد. این الگوریتم در محیط متلب پیاده سازی شده است.
4. اکتساب و پردازش داده برای ساخت پایگاه داده تصویر
پروژه تحقیقاتی بین Politechnico di Torino و موسسه تحقیقات الکترونیک و مخابرات بر اساس اعتبار سنجی روش پیشنهادی در دو سایت آزمایشی مختلف است که برای داشتن دو سناریوی داخلی متفاوت با برخی مسائل خاص انتخاب شدهاند. اولین محیط، ایستگاه متروی Bangbae در سئول (جمهوری کره)، یک زیرساخت عمومی مهم است که در آن یک LBS بهتر می تواند مفید بودن خود را بیان کند. این فضاهای داخلی متنوعی را با مبلمان متفاوت و همچنین یک کف راه آهن بسیار تکراری ارائه می دهد. همچنین بسیار پرجمعیت است که در سیستم IRBL مسئله مهمی است. دومین سایت آزمایشی، بخش تحقیقات ساختمان ETRI در Daejeon (جمهوری کره) است که با توجه به عملکرد (دفتر تحقیقات)، مناطق داخلی تکراری هستند. هر طبقه دارای یک راهرو با همان رنگ و مبلمان یکسان است. دلیل سناریوهای مختلف بر اساس ارزیابی روش محلی سازی داخلی در مناطق پر سر و صدا (بسیار محبوب در بین بسیاری از مردم) و در مناطق مشابه است که از نظر اول، یافتن تفاوت بین طبقات مختلف دشوار است. (شکل 6 ).
از نقطه نظر عملیاتی، اولین گام کار، تحقق یک بررسی کامل از دو ناحیه آزمایشی با استفاده از ابزار و روش سنتی LiDAR [ 45 ] بود. برای تضمین تداوم دادهها در همه محیطها، چندین تصویر برای یک رویکرد فتوگرامتری معمولی مبتنی بر ساختار از الگوریتمهای حرکت (SfM) با ایده ترکیب دادهها در صورت از دست دادن اطلاعات به دست آمد [46 ] . از آنجایی که اکتساب LiDAR برای کل نمایش دو محیط مناسب بود، از شرح فتوگرامتری برای تولید پایگاه داده RGB-D استفاده نشد.
جنبه دیگری که باید بر آن تاکید شود این است که بررسی در ساختمان ETRI با استفاده از شبکه توپوگرافی ارجاع جغرافیایی نشده است. این فقدان روند موقعیت یابی داخلی را که در این مورد یک مرجع نسبی دوربین به محیط اطراف ارائه می دهد، کاهش نمی دهد.
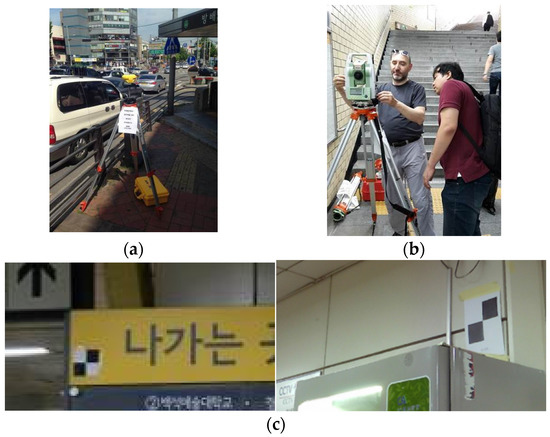
برای بررسی متریک ایستگاه مترو Bangbae، ابتدا یک شبکه توپوگرافی کلی از منطقه و اطراف برای تعریف یک سیستم مختصات مرجع مشترک تحقق یافت. در این مورد، یک استراتژی نظرسنجی ترکیبی GNSS و ایستگاه کل (TS) مورد استفاده قرار گرفت. این شبکه در سه سطح اصلی ایستگاه مترو تحقق یافت. اندازهگیریهای GNSS به طور طبیعی در شرایط بیرونی به دست آمدند، علاوه بر این، دو راس با اندازهگیریهای سنتی TS به سطوح 1- و -2 متصل شدند، همانطور که در شکل 7 a,b نشان داده شده است. برای بررسی GNSS از گیرنده Geomax Zenith 35 و برای شبکه TS از Leica TS06 استفاده شد.
در پس پردازش، شبکه با Leica Geo-office و نرم افزار Microsurvey Starnet با استفاده از ایستگاه دائمی GNSS Suwon (ایستگاهی از شبکه خدمات بین المللی GNSS) به عنوان نقطه مرجع تنظیم شده است. با توجه به دقت به دست آمده در هر راس (کمتر از 1 سانتی متر)، مرحله بعدی بررسی نشانگرهای قرار گرفته در ناحیه ایستگاه بود. این عملیات با TS با استفاده از اندازه گیری های سنتی ساید شات انجام شد. نشانگرها، در این مورد، شطرنجهای سیاه و سفید، معمولاً برای ثبت اسکنها و برای ارجاع جغرافیایی مدل نهایی استفاده میشوند ( شکل 7 ج).
در نهایت، برای خرید LiDAR، دو Faro Focus3d X130 استفاده شد. این ابزار یک لیزر تغییر فاز است که به ما امکان می دهد ابرهای نقطه سه بعدی را با دقت 2± میلی متر در محدوده زیر بدست آوریم: 0.30-130 متر. در حین جمعآوری ابر نقطه، با توجه به دوربین دیجیتال موجود، میتوان تصاویر ناحیه اسکن شده را نیز به دست آورد. در زمینه آزمایش، اکتساب با وضوح 1/5 (هر نقطه 9 میلی متر در 10 متر) و کیفیت 4× (نقاط چهار بار اندازه گیری شده) انجام شد. برای بررسی کامل LiDAR از ایستگاه متروی Bangbae، 114 اسکن (55 در سطح 1- و 59 در سطح 2-) به دست آمد. با توجه به تنظیمات فوق الذکر اسکنر، هر اسکن تقریباً 26 میلیون نقطه دارد و حدود سه میلیارد نقطه اندازه گیری شده است.47 ] با استفاده از نرم افزار Scene توسط فارو که شامل مراحل اصلی زیر است: رنگ آمیزی ابر نقطه، ثبت اسکن و اسکن ارجاع جغرافیایی. طبیعتاً با استفاده از نشانگرها می توان صحت ارجاع جغرافیایی را با توجه به باقیمانده در نقطه اندازه گیری شده ارزیابی کرد. میانگین RMS در نشانگرهای اندازه گیری شده (85 مورد استفاده) 1.56 سانتی متر بود. شکل 8 سه نما از ابر نقطه کامل (114 ابر نقطه ادغام شده) را نشان می دهد.
ساختمان ETRI فقط توسط LiDAR در یک سیستم مرجع محلی بررسی شد. تمام خریدها بدون شبکه توپوگرافی معمولاً مورد نیاز و بدون نشانگرهای ثبت ابرها انجام شد. در نتیجه، ابر نقطه نهایی در یک سیستم مرجع نقشه برداری شناخته شده قرار ندارد.
در مورد ایستگاه Bangbae، خریدهای LiDAR با استفاده از Faro Focus 3D X130 فوقالذکر انجام شده است که با وضوح بسیار بالاتر استفاده میشود: 1/4 (هر نقطه 5 میلیمتر در 10 متر) با همان کیفیت (4×) تنظیمات Bangbae ساختمان کامل (هفت طبقه) با 111 اسکن به طور کامل اسکن شد که با توجه به تنظیمات اسکنر، هر اسکن تقریباً 40 میلیون نقطه تحویل داده شد. تقریباً 4.5 میلیارد امتیاز اندازه گیری شد.
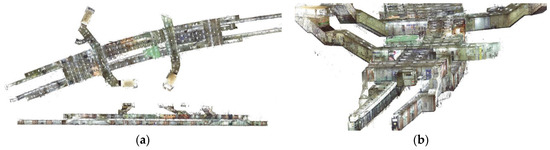
در مورد ساختمان ETRI، داده ها با استفاده از نرم افزار Scene توسط Faro پردازش شدند، اما ثبت اسکن با استفاده از رویکرد ابر به ابر انجام شد [ 48 ]. این رویکرد، بر اساس الگوریتمهای شناخته شده نزدیکترین نقطه تکراری (ICP) [ 49 ، 50 ، 51]، از نسخه 5.5 نرم افزار Scene پیاده سازی شده است و امروزه به خوبی در خط لوله پردازش داده Scene LiDAR کار می کند. با استفاده از این رویکرد، ابتدا مهم است که یک تنظیم اولیه از چندین موقعیت اسکن را تعریف کنیم. پس از موقعیت اولیه، الگوریتم به ما اجازه می دهد تا موقعیت اسکن های مجاور را با استفاده از شکل ابرهای مختلف بهبود دهیم. از نظر دقت، در این مورد، فقط می توان اختلاف بین ابرهای مجاور را درک کرد که در مورد ساختمان ETRI، برای تمام اسکن های ثبت شده زیر 1 سانتی متر بود. به طور طبیعی، همانطور که در بالا گزارش شد، با رویکرد ابر به ابر، ارجاع جغرافیایی مجاز نبود زیرا هیچ نقطه کنترل زمینی (GCPs) در منطقه اندازهگیری نشد. تمام ابرهای نقطه ای به یک سیستم محلی ارجاع داده شدند که از موقعیت دلخواه اولین اسکن به دست آمده در ساختمان شروع می شد. که درشکل 9 ، دو نما از ابر نقطه کامل نشان داده شده است.
مرحله نهایی برای هر دو ساختمان، تولید فایل xyz. این فایل ASCII شامل مختصات X، Y و Z هر نقطه و مقادیر R، G و B استخراج شده از دوربین داخلی LiDAR است. این فایل برای تولید تصاویر RGB-D استفاده شده است.
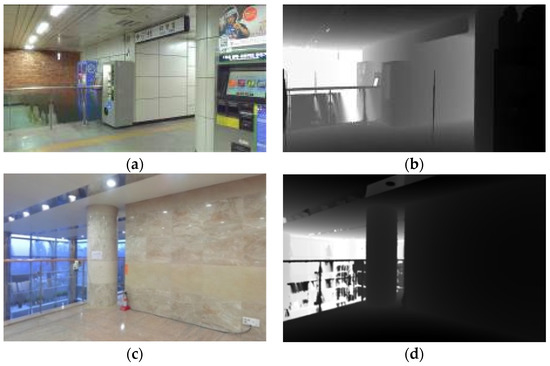
تصویر مصنوعی RGB-D را می توان به طور خودکار با استفاده از ابزارهای نرم افزاری ScanToRGBDImage (توسعه یافته توسط گروه تحقیقاتی Geomatics Politecnico di Torino در اینتل ویژوال فرترن) با شروع از ابر نقطه LiDAR تولید کرد. نرم افزار ScanToRGBDImage مجموعه ای از تصاویر “مصنوعی” .JPG را با تصاویر محدوده متناظر تولید می کند ( شکل 10)). برای هر موقعیت اسکن، 96 تصویر ایجاد شده است: 32 جهت افقی برای سه شیب مختلف 0 درجه، 10 درجه و 20 درجه نسبت به صفحه افقی با 2500 × 1600 پیکسل، اندازه پیکسل 3 میکرومتر، و فاصله کانونی 4.667 میلی متر. برای Bangbae DB، تقریباً 9700 تصویر RGB-D در حدود 36 ساعت زمان پردازش دسته ای با رایانه رومیزی (رم i7 5600 U 2.66 گیگاهرتز 32 گیگابایت رم) تولید شده است، در حالی که برای ساختمان ETRI، 10700 تصویر در حدود تولید شده است. 40 ساعت با کامپیوتری با همین مشخصات.
5. دستیابی به تصویر گوشی هوشمند برای روش بازیابی و تعریف حقیقت زمین
در سایت، با هدف ارزیابی روش بازیابی، چندین عکس از مناطق آزمایشی با دستگاههای تلفن همراه تجاری گرفته شده است، یعنی Samsung Galaxy A5، Galaxy S5 و Galaxy S7 Edge برای مقایسه سنسورهای مختلف استفاده شدهاند.
دستگاههایی که برای خریدها استفاده میشوند، تلفنهای هوشمند با یک دوربین غیر متریک یکپارچه هستند که نیاز به کالیبراسیون از طریق روشهای تحلیلی برای تعریف ویژگیهای سیستم نوری-دیجیتال برای ارزیابی پارامترهای اعوجاج و سایر خطاها دارند. کالیبراسیون اجازه می دهد تا اثرات اعوجاج شعاعی و مماسی حسگرهایی را که در تعریف جهت داخلی دوربین با استفاده از معادلات همخطی دخیل هستند، ارزیابی کند. با این حال، به عنوان یک تقریب، می توان تنها اثرات اعوجاج شعاعی را در نظر گرفت که در این مورد با دو پارامتر K 1 و K 2 بیان می شود .
با دانستن مختصات جسمی برخی از نقاط بدست آمده توسط دوربین، می توان با حل محاسبه تنظیم بسته نرم افزاری، پارامترهای مجهول را به دست آورد. مجهول شش پارامتر جهت گیری خارجی تصاویر و پنج پارامتر دوربین (ξ 0 , η 0 , c, K 1 و K 2 ) هستند. شیئی که معمولاً بر روی آن کالیبراسیون انجام می شود یک شبکه کالیبراسیون است که به طور خاص در جایی ساخته می شود که مختصات نقاط شبکه با دقت بالایی مشخص باشد. این روش به خود کالیبراسیون سنسور دوربین معروف است.
برای گنجاندن فرآیند کالیبراسیون در روش IRBP، ابزار “Camera Calibrator” متلب مورد آزمایش قرار گرفت. این ابزار می تواند پارامترهای اعوجاج درونی، بیرونی و لنز را برای حذف اثرات اعوجاج و بازسازی صحنه سه بعدی تخمین بزند. این برنامه نیاز به استفاده از یک الگوی شطرنجی خاص دارد که نباید مربع باشد ( شکل 11). تصاویر الگو باید با زوم و فوکوس ثابت به دست آیند. کالیبراسیون به حداقل سه تصویر نیاز دارد، اما پیشنهاد میشود از 10 تا 20 تصویر از فواصل و جهتهای مختلف برای به دست آوردن بهترین نتایج استفاده شود. مرورگر دادههای ابزار، تصاویر را با نقاط شناسایی شده نمایش میدهد، زیرا الگوی شطرنجی مربعی شکل نیست. یک سیستم مرجع نیز با استفاده از تعداد مربع های مختلف در دو جهت تعریف می شود. الگوریتم کالیبراسیون یک مدل دوربین سوراخ سوزنی را فرض می کند و پس از پردازش برنامه ها، نتایج و دقت فرآیند را نمایش می دهد.
در این کار، خود کالیبراسیون روی سه گوشی هوشمند مختلف مورد استفاده در روش IBRP انجام شد و نتایج در جدول 1 نشان داده شده است .
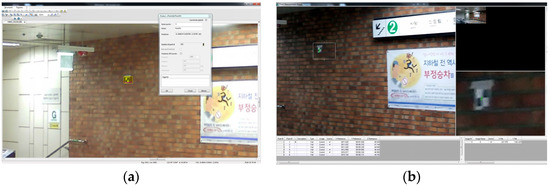
پس از کالیبراسیون داخلی، برای تعریف موقعیت و نگرش تصاویر گوشی هوشمند به دست آمده و سپس استفاده از آن به عنوان «حقیقت زمین»، از فرآیند فتوگرامتری استفاده شد. در مورد اکتساب تک شات، میتوان یک تنظیم تصویر واحد (یا رأس هرمی) را انجام داد که به ما امکان میدهد مختصات نقطه اکتساب (X 0، Y 0 و Z 0 ) و داراییها را نیز ارزیابی کنیم. (ω, ϕ�، و κ). برای این کار، حداقل شش معادله هم خطی باید نوشته شود که به این معنی است که برای انجام این فرآیند، سه GCP پلانو ارتفاعی مورد نیاز است. مختصات GCPها مستقیماً از ابرهای نقطه LiDAR قبلی با استفاده از Scene استخراج شد. ابتدا یک نقطه قابل مشاهده روی تصویر گوشی هوشمند انتخاب شد. سپس همان نقطه بر روی ابر نقطه اندازه گیری شد و مختصات استخراج شد. این مقادیر (مختصات) به عنوان GCP در نرم افزار فتوگرامتری مورد استفاده قرار گرفتند ( شکل 12).). در تحقیق حاضر از Erdas Imagine توسط Hexagon Geospatial برای فرآیند استفاده شده است. برای کنترل دقیق نتایج، حداقل از شش نقطه به عنوان GCP استفاده شد. دقت نهایی برای تمام تصاویر تجزیه و تحلیل شده حدود 5 سانتی متر برای موقعیت و حدود 10 میلی گرم برای مقادیر زاویه ای بود. 20 تصویر پرس و جو برای چک ایستگاه Bangbae (10 تصویر برای هر طبقه) و 10 تصویر برای ساختمان ETRI استفاده شد.
همانطور که در بخش 3.2 بیان شد ، فناوری جستجوی بصری به ما این امکان را می دهد که بهترین تصاویر مرجع را از پایگاه داده تصاویر RGB-D بازیابی کنیم و آنها را با امتیاز اولویت رتبه بندی کنیم. این رویه ها بر روی تصاویر پرس و جو انتخاب شده برای هر دو سایت آزمایش اعمال شد و نتایج استخراج در جدول 2 برای ایستگاه مترو Bangbae و در جدول 3 برای ساختمان ETRI نشان داده شده است. در این جداول نمرات به دست آمده از تصویر رتبه اول انتخاب شده توسط سرور CDVS گزارش شده است. این بهترین راه حل از سه نامزد ممکن پیشنهاد شده توسط CDVS است. همانطور که در جدول 2 نشان داده شده است، نمره همیشه بیشتر از 3 است که نشان دهنده راه حل های بسیار خوب است. در بیشتر موارد، امتیاز بیشتر از 5 است که نشان دهنده راه حل خوبی است. زمان فرآیند بازیابی پرس و جو در حدود ثانیه درختی تخمین زده می شود. در دومین سایت تست، 10 عکس چک توسط گوشی هوشمند سامسونگ S7 به دست آمده است. نتایج استخراج تصویر مرجع با استفاده از CDVS بیشتر از 3 است که نشاندهنده راهحلهای بسیار خوب است، به استثنای تصویر شماره 2 (امتیاز = 2.54) که به دلیل نادرست بودن راهحل IRBL حاصل نادیده گرفته شد.
6. نتایج
پس از جمعآوری و پردازش دادهها برای نسل DB و بازیابی تصویر و تعریف حقیقت زمین، گام بعدی استفاده از الگوریتم IRBL برای تعیین موقعیت و جهتگیری دوربین گوشی هوشمند بهدستآمده بود. این مرحله بر روی 30 تصویر به دست آمده با استفاده از پرس و جو اعمال شد و به طور خودکار با استفاده از الگوریتم پیشنهادی شرح داده شده در بخش 3.3 تکمیل شد .
6.1. ارزیابی دقت
تصاویر با استفاده از تصاویر RGB-D استخراج شده توسط CDVS به عنوان تصاویر مرجع در چند ثانیه قرار گرفتند.
نتایج برای سایت آزمایش Bangbae در جدول 4 (طبقه اصلی، گوشی هوشمند A5) و جدول 5 (کف قطار، گوشی هوشمند S5) خلاصه شده است. جدول نشان می دهد:
-
نتایج IRBL و حقیقت زمین برای بهترین راه حل ها (تصاویر 4 و 17) و بدترین راه حل ها (تصاویر 8 و 16) برای دو طبقه تحلیل شده.
-
اختلاف بین راهحلهای IRBL و حقیقت پایه برای بهترین راهحلها و بدترین راهحلها که با تفاوتهای شش پارامتر جهتگیری خارجی IRBL و نتایج حقیقت زمین بیان میشود. و
-
برخی از پارامترهای آماری (حداقل، حداکثر، میانگین و ریشه میانگین مربعات خطا = RMSE) اختلافات.
ما نتایج زیر را یافتیم:
-
اختلاف در X، Y، و Z همیشه کمتر از 1.5 متر در مقدار مطلق است، به استثنای خطای فاحش تصویر 12 در X. با توجه به شکل کف قطار (طول و باریک) m برخی از مشکلات مهم هندسه نادرست نقاط ویژه تاسیس شد،
-
انحراف استاندارد اختلافات در X حدود 1 متر و در Y حدود 50 سانتی متر است که کیفیت XY DB است.
-
انحراف استاندارد اختلاف در Z حدود 40 سانتی متر است. این کیفیت Z DB است.
-
مقادیر زاویه ای با دقت حدود 10 gon تخمین زده می شود.
-
میانگین های برآورد شده برای همه پارامترها معنی دار نیستند. بنابراین، هیچ برآورد سیستماتیک وجود ندارد.
با محاسبه فرکانس های نسبی مغایرت های سه بعدی، می توان تعریف کرد که 25 درصد راه حل های IRBL دارای اختلاف کمتر از 0.5 متر، 65 درصد با کمتر از 1 متر و 95 درصد با کمتر از 2 متر هستند. نمونه ای از یک راه حل خوب در شکل 13 با یک راه حل کاملا خوب در شکل 14 نشان داده شده است .
برای ساختمان ETRI، در مقاله حاضر، تنها اختلافات در جدول 6 گزارش شده است . به استثنای تصویر 2، اختلاف بین راه حل های IRBL و حقیقت زمینی مشابه ایستگاه Bangbae با کمی تفاوت است. در دو مورد، نتایج به دلیل تعداد کم نقاط مشخصه که نسبتا نزدیک هستند، نقاط پرت را در جهت Y (بیش از 3 متر اختلاف) نشان می دهد. در دو مورد دیگر، اختلافاتی در Z وجود دارد که بسیار زیاد است (بیش از 8 متر) به دلیل شباهت بین طبقات مختلف در ساختمان ETRI که باعث بازیابی نادرست می شود ( شکل 15 ).
6.2. قابلیت اطمینان IRBL
در روش پیشنهادی، تخمین ماتریس اساسی بین تصاویر مرجع و پرس و جو از یک الگوریتم برآورد قوی مبتنی بر RANSAC استفاده میکند. این تکنیک می تواند بر اساس تعداد نمونه های مورد استفاده، تنوع خاصی در محلول نهایی ایجاد کند. برای برخی از تصاویر، روش IRBL 20 بار تکرار شده است تا قابلیت اطمینان راه حل ها (حداقل، حداکثر، میانگین و RMSE) برای شش پارامتر جهت گیری خارجی تعریف شود. نتایج در جدول 7 برای نشان دادن قابلیت اطمینان قابل توجه راه حل های برآورد شده گزارش شده است. RMSE مربوط به دقت اسمی این روش کمتر از دقت برآورد شده است.
7. نتیجه گیری و کارهای آینده
روشی که در مقاله گزارش شده است به خوبی آزمایش شده است و نشان می دهد که بخش اول گردش کار پیشنهادی را می توان با موفقیت بدون مشکل با توجه به منطقه ای که نیاز به بررسی دارد انجام داد. بازه زمانی به جمع آوری داده ها و پردازش داده های LiDAR متصل است. روشهای جدید مانند Kinect، ابزارهای SLAM، دوربینهای ToF یا تکنیکهای فتوگرامتری SfM در دست توسعه هستند و برای بهبود سرعت عملیات بررسی مورد مطالعه قرار گرفتهاند. امروزه عملکرد نرم افزار محقق شده پایدار است و با مجموعه داده های بزرگ نیز کارآمد است. بهبودهای بیشتر با استفاده از یک نسخه جدید در C++ برای سرعت بخشیدن به زمان محاسباتی برای تولید تصاویر RGB-D در دست توسعه است. وضوح تصاویر تولید شده به مدل LiDAR و مخصوصاً به دوربین آنبورد که برای بدست آوردن اطلاعات RGB پس از اسکن استفاده می شود، متصل می شود. در مقایسه با سایر دستگاه های اکتساب سه بعدی، این بهترین راه حل است. رویه CDVS توسعهیافته کارآمد است و بدون هیچ مشکلی کار میکند و نتایج عالی را در طول فرآیند بازیابی بسیار سریع ارائه میدهد.
رویکرد رویه IRBL جدید است. مهمترین پیشرفت مربوط به استفاده از الگوریتم DISTRAT همراه با RANSAC است که در مقایسه با استفاده از RANSAC، سرعت فرآیند را 100 برابر افزایش می دهد. استفاده از رویکرد فتوگرامتری کنترلشدهتر به ما امکان میدهد تا دقت واقعی موقعیتیابی را همانطور که در نتایج گزارششده مشاهده میشود، ارزیابی کنیم. با توجه به دقت ارزیابیشده در بخشهای قبلی، این رویکرد میتواند با استفاده از تصاویر گوشیهای هوشمند با دقت زیر متریک برای موقعیت و چند گان برای نگرش، موقعیتیابی صحیح در داخل ساختمان را به دست آورد. IRBL می تواند در شرایط پیچیده (صدای ناشی از افراد، راهروهای باریک، نور مصنوعی و سایر مشکلات محیطی) راه حل صحیحی به دست آورد.
از آنجایی که رویه IRBL در حال آزمایش است، اپلیکیشن موجود فقط در MATLAB توسعه یافته است و باید با استفاده از زبان های برنامه نویسی دیگر بهبود یابد تا محصولی با کارایی بالاتر از نظر قابلیت استفاده و سرعت به دست آید. تحقیقات هنوز در حال انجام است. ابتدا، ادغام عملیات بررسی که به داده های فتوگرامتری و داده های LiDAR متصل می شود در دست ارزیابی است. علاوه بر این، استفاده از کینکت، دوربینهای ToF و ابزارهای SLAM گزینههای خوبی برای کارهای آینده هستند. برخی از اولین نتایج با استفاده از Kinect امیدوارکننده هستند و تجزیه و تحلیل دقیق تری از نتایج در دست ارزیابی است. علاوه بر این، مراحل بعدی پروژه طبق تحقیقات رایج (Politecnico و ETRI) تحقق سرور با استفاده از فناوری CDVS برای امکان اجرای بازیابی با استفاده از وب خواهد بود.
در نهایت، الگوریتم IRBL با توسعه جدید تحقق یک رابط برنامهنویسی کاربردی (API) بهبود مییابد که به استخراج اطلاعات مورد نیاز برای موقعیتیابی داخلی و ارائه نتایج به طور مستقیم بر روی گوشی هوشمند امکانپذیر میشود.
منابع
- لی، اس. Qin، Z. Song, H. یک روش زمانی- مکانی برای تشخیص گروهی، مکان یابی و ردیابی. IEEE Access 2016 ، 4 ، 4484-4494. [ Google Scholar ]
- ژو، ی. زلاتانوا، اس. وانگ، ز. ژانگ، ی. لیو، ال. ردیابی مسیر انسان بر اساس نظارت تصویری در سناریوهای سه بعدی داخلی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 4 ، 97-101. [ Google Scholar ] [ CrossRef ]
- ورنر، ام. هان، سی. Schauer, L. DeepMoVIPS: موقعیت یابی بصری داخل ساختمان با استفاده از یادگیری انتقال. در مجموعه مقالات هفتمین کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی (IPIN)، مادرید، اسپانیا، 5 تا 7 اکتبر 2016.
- فیشر، JA موقعیت یابی داخلی و مدیریت دیجیتال: رژیم های نظارتی در حال ظهور در بیمارستان ها در نظارت و امنیت: سیاست فناوری و قدرت در زندگی روزمره . تیلور و فرانسیس: نیویورک، نیویورک، ایالات متحده آمریکا، 2006; صص 77-88. [ Google Scholar ]
- زتیک، ر. شن، جی. Thomä, R. ارزیابی الزامات برای سیستم های محلی سازی UWB در برنامه های کاربردی سرگرمی خانگی. در مجموعه مقالات کنفرانس بین المللی 2010 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، زوریخ، سوئیس، 15 تا 17 سپتامبر 2010.
- تلز، م. التواب، س. حیدری، HM بهبود امنیت شبکه های حسگر بی سیم در یک سیستم نظارت بر محیط زیست اینترنت اشیا. در مجموعه مقالات سمپوزیوم طراحی مهندسی سیستم ها و اطلاعات 2016 (SIEDS)، شارلوتزویل، ویرجینیا، ایالات متحده آمریکا، 29 آوریل 2016.
- شیائو، ز. هاویاریمانا، وی. لی، تی. وانگ، دی. چارچوب غیرخطی روش هموارسازی ذرات تاخیری برای محلیسازی خودرو در محیط غیر گاوسی. Sensors 2016 , 16 , 692. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کاگاوا، تی. لی، H.-B. Ryu, M. یک سیستم ناوبری UWB با کمک الگوریتم خودمختار مبتنی بر حسگر – استقرار و آزمایش در مرکز خرید. در مجموعه مقالات سمپوزیوم بین المللی 2014 در زمینه ارتباطات چند رسانه ای شخصی بی سیم (WPMC)، سیدنی، استرالیا، 7 تا 10 سپتامبر 2014.
- لیو، جی جی. فیلیپس، سی. Daniilidis، K. محلی سازی مبتنی بر ویدئو بدون نقشه برداری سه بعدی برای افراد دارای اختلال بینایی. در مجموعه مقالات کنفرانس انجمن کامپیوتر IEEE کارگاه های آموزشی بینایی و تشخیص الگوی کامپیوتر (CVPRW)، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. ص 23-30.
- لیانگ، جی.زی. کورسو، ن. ترنر، ای. زاخور، الف. محلیسازی مبتنی بر تصویر در محیطهای داخلی. در مجموعه مقالات چهارمین کنفرانس بین المللی 2013 در محاسبات برای تحقیقات و کاربردهای زمین فضایی (COM. Geo)، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 22-24 ژوئیه 2013; صص 70-75.
- انور، ق. مالک، AW; Thornberg، B. طراحی برچسب های مرجع کدگذاری شده برای ناوبری نوری داخلی با استفاده از دوربین تک چشمی. در مجموعه مقالات کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی (IPIN)، Montbeliard، فرانسه، 28-31 اکتبر 2013. صص 1-8.
- ایجاز، ف. یانگ، هنگ کنگ؛ احمد، ع. Lee, C. موقعیت یابی داخلی: بررسی سیستم های موقعیت یابی اولتراسونیک داخلی. در مجموعه مقالات پانزدهمین کنفرانس بین المللی فناوری ارتباطات پیشرفته (ICACT)، پیونگ چانگ، کره، 27 تا 30 ژانویه 2013. صص 1146–1150.
- بومگون، ک. وونسون، بی. محلیسازی کیم، YC در فضای داخلی برای دستگاههای Wi-Fi با نظارت متقابل AP و مثلثسازی وزنی. در مجموعه مقالات کنفرانس ارتباطات و شبکه سازی مصرف کننده IEEE (CCNC)، لاس وگاس، NV، ایالات متحده، 9 تا 12 ژانویه 2011.
- Lau، EEL; Chung، WY پیشرفته سیستم ردیابی موقعیت مکانی کاربر مبتنی بر RSSI برای محیط های داخلی و خارجی. در مجموعه مقالات کنفرانس بین المللی فناوری اطلاعات همگرایی، Gyeongju، کره، 21-23 نوامبر 2007.
- کوی، ایکس. گالیور، TA; آهنگ، اچ. Li, J. موقعیت یابی بلادرنگ بر اساس دستگاه موج میلیمتری به ارتباطات دستگاه. IEEE Access 2016 ، 4 ، 5520–5530. [ Google Scholar ] [ CrossRef ]
- دابوو، پ. جینامو، جی. سنسورهای اینرسی Lingua، AM برای ناوبری تلفن های هوشمند. Springerplus 2015 ، 4 ، 1-18. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- پیراس، م. Dabove, P. مقایسه دو نسل مختلف IMU بازار انبوه: تجزیه و تحلیل سوگیری و کاربردهای زمان واقعی. در مجموعه مقالات IEEE/ION 2016 Position, Location and Navigation Symposium, PLANS 2016, Savannah, GA, USA, 11-14 آوریل 2016.
- دابوو، پ. آیکاردی، آی. گراسو، ن. لینگوا، ا. جینامو، جی. Corbi, C. رویکرد کاهش سنسورهای اینرسی برای دوربین های هیبریدی و موقعیت یابی MEMS. در مجموعه مقالات IEEE/ION 2016 Position, Location and Navigation Symposium, PLANS 2016, Savannah, GA, USA, 11-14 آوریل 2016.
- مائوتز، آر. سباستین، تی. بررسی سیستم های موقعیت یابی نوری داخلی. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، مادرید، اسپانیا، 21 تا 23 سپتامبر 2011.
- هوانگ، ع. باکراخ، ا. هنری، پی. کراینین، ام. ماتورانا، دی. فاکس، دی. روی، N. کیلومتر شماری بصری و نقشه برداری برای پرواز خودمختار با استفاده از دوربین RGB-D. در تحقیقات رباتیک ؛ Springer: برلین، آلمان، 2017; صص 235-252. [ Google Scholar ]
- لیما، ام وی؛ باستوس، وی بی. کورکا، روابط عمومی؛ Araujo، DC vSlam در یک محیط شبیه سازی شده سفارشی آزمایش می کند. در مجموعه مقالات کنفرانس بین المللی 2015 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، بنف، AB، کانادا، 13 تا 16 اکتبر 2015.
- لوچف، پ. کریشنان، MN; یو، سی. منکه، جی. زاخور، الف. انگشت نگاری و نقشه برداری همزمان برای تصویر چندوجهی و موقعیت یابی داخلی WiFi. در مجموعه مقالات کنفرانس بین المللی 2014 در مورد موقعیت یابی داخلی و ناوبری داخلی (IPIN)، بوسان، کره، 27 تا 30 اکتبر 2014.
- لیو، ال. Sisi، Z. یک مدل داده معنایی برای ناوبری داخلی. در مجموعه مقالات چهارمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی، ساحل ردوندو، کالیفرنیا، ایالات متحده آمریکا، 6 نوامبر 2012. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- لی، ایکس. نیش، م. ژانگ، جی جی؛ Wu, J. یادگیری طبقهبندیکنندههای همراه با تصاویر RGB برای تشخیص شی RGB-D. تشخیص الگو 2017 ، 61 ، 433-446. [ Google Scholar ] [ CrossRef ]
- کواجی، ح. هاتادا، ک. یاماساکی، تی. Aizawa، K. سیستم موقعیت یابی داخلی مبتنی بر تصویر: تطبیق سریع تصویر با استفاده از تصاویر پانوراما همه جهته. در مجموعه مقالات اولین کارگاه بین المللی ACM در مورد تجزیه و تحلیل ویدیوی فراگیر چندوجهی، Firenze، ایتالیا، 29 اکتبر 2010.
- لیانگ، جی.زی. کورسو، ن. ترنر، ای. Zakhor, A. موقعیت یابی مبتنی بر تصویر دستگاه های تلفن همراه در محیط های داخلی. در تخمین موقعیت مکانی چندوجهی فیلم ها و تصاویر ; Springer: برلین، آلمان، 2005; صص 85-99. [ Google Scholar ]
- دونگ، جی. شیائو، ی. نوریکیس، م. او، ز. Ylä-Jääski, A. نسخه ی نمایشی: iMoon: استفاده از تلفن های هوشمند برای ناوبری داخلی مبتنی بر تصویر. در مجموعه مقالات سیزدهمین کنفرانس ACM در مورد سیستم های حسگر شبکه جاسازی شده، سئول، کره، 1 تا 4 نوامبر 2015. صص 449-450.
- چو، YS; جی، م. کیم، جی. Jeon, JI الگوریتم موقعیتیابی سه بعدی فضای داخلی با مقیاسپذیری بالا با استفاده از یکپارچهسازی حسگر و Wi-Fi با اتصال آزاد. در مجموعه مقالات هفدهمین کنفرانس بین المللی فناوری ارتباطات پیشرفته (ICACT)، پیونگ چانگ، کره، 1 تا 3 ژوئیه 2015؛ ص 96-99.
- یانگ، جی. خو، آر. Lv، Z. Song, H. تجزیه و تحلیل آرایه های دوربین قابل استفاده در اینترنت اشیا. Sensors 2016 , 16 , 421. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- برناز، ل. Dequal, S. یک مفهوم جدید: تصویر جامد. در مجموعه مقالات نوزدهمین سمپوزیوم بین المللی، CIPA 2003: دیدگاه های جدید برای نجات میراث فرهنگی، آنتالیا، ترکیه، 30 سپتامبر تا 4 اکتبر 2003.
- لینگوا، ا. آیکاردی، آی. جینامو، جی. کوربی، سی. فرانسینی، جی. لپسوی، اس. Lovisolo، P. راه حل جستجوی تصویری MPEG7 برای موقعیت یابی مبتنی بر تشخیص تصویر با استفاده از مدل های سه بعدی. در مجموعه مقالات بیست و هفتمین نشست فنی بینالمللی بخش ماهواره مؤسسه ناوبری (ION GNSS+ 2014)، تامپا، FL، ایالات متحده آمریکا، 8 تا 12 سپتامبر 2014. ص 2078–2088.
- سیکورا، تی. استاندارد بصری برای توصیف محتوا – یک مرور کلی، سیکورا. در دسترس آنلاین: http://ieeexplore.ieee.org/document/927422/ (در 17 ژانویه 2017 قابل دسترسی است).
- ISO/IEC JTC1/SC29/WG11/W13564 مدل آزمایشی 6: توصیفگرهای فشرده برای جستجوی بصری. در دسترس آنلاین: http://www.iso.org/iso/home/store/catalogue_tc/catalogue_detail.htm?csnumber=65393 (در تاریخ 17 فوریه 2017 قابل دسترسی است).
- Lowe, D. ویژگیهای متمایز تصویر از نقاط کلیدی تغییرناپذیر مقیاس. بین المللی جی. کامپیوتر. Vis. 2004 ، 60 ، 91-110. [ Google Scholar ] [ CrossRef ]
- لپسوی، اس. فرانسینی، جی. کوردارا، جی. de Gusmao، PP مدلسازی آماری نقاط پرت برای جستجوی سریع بصری. در مجموعه مقالات کنفرانس بین المللی IEEE در چند رسانه ای و نمایشگاه (ICME)، بارسلونا، اسپانیا، 11-15 ژوئیه 2011. صص 1-6.
- جیووانی کوردارا، جیانلوکا فرانسینی، اسکیالگ لپسوی، پدرو پورتو بوآرک دی گوسمائو. روش و سیستم مقایسه تصاویر US 9008424 B2، 14 آوریل 2015.
- جیانلوکا فرانسینی، اسکیالگ لپسوی. روش و سیستم مقایسه تصاویر US 9245204 B2، 26 ژانویه 2016.
- هارتلی، آر. زیسرمن، A. هندسه چند نمای در بینایی کامپیوتری ، ویرایش دوم. انتشارات دانشگاه کمبریج: کمبریج، انگلستان، 2004. [ Google Scholar ]
- کریس، جی.ام. ادوارد، MM; جیمز، SB Manual of Photogrammetry ، ویرایش پنجم. ASPRS: Bethesda، MD، ایالات متحده؛ ص 280-281.
- CDVS. توصیفگرهای فشرده برای جستجوی بصری . ISO/IEC DIS 15938-13; CDVS: اوکلند، کالیفرنیا، ایالات متحده آمریکا، 2014. [ Google Scholar ]
- ودالدی، A. اجرای باز آشکارساز و توصیفگر SIFT . گزارش فنی UCLA CSD 070012; UCLA: لس آنجلس، کالیفرنیا، 2007. [ Google Scholar ]
- کارارا، فتوگرامتری غیر توپوگرافی HM ، ویرایش دوم. ASPRS: Bethesda، مریلند، ایالات متحده؛ ص 46-48.
- Baarda, W. A Testing Procedure for Use in Geodetic Networks . NCG: دلفت، هلند، 1968; صص 53-55. [ Google Scholar ]
- کراوس، ک. فتوگرامتری: هندسه از تصاویر و اسکن های لیزری . Walter de Gruyter: برلین، آلمان، 2017; جلد 1، ص 21-29، 184-189. [ Google Scholar ]
- بالتی، سی. گوئرا، اف. ورنیه، پی. استودنیکا، ن. ریگل، جی. Orlandini، S. ارزیابی مقایسه ای عملی یک حسگر ترکیبی یکپارچه بر اساس فتوگرامتری و اسکن لیزری برای بازنمایی معماری. در دسترس آنلاین: http://www.isprs.org/proceedings/XXXV/congress/comm5/papers/612.pdf (در 17 ژانویه 2017 قابل دسترسی است).
- باستونرو، پی. دونادیو، ای. Chiabrando، F. ASpanò ادغام مدلهای سه بعدی مشتقشده از TLS و تکنیکهای مبتنی بر تصویر برای مستندسازی پیشرفته CH. در مجموعه مقالات ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva Del Garda, Italy, 23-25 ژوئن 2014.
- Noardo، F. تصویر متراکم مطابق با Il Recupero Di Contenuto Metrico Da Immagini Di Documentazione E Camere Non Metrice. در دسترس آنلاین: http://sifet.org/sifet/phocadownloadpap/sifet1_2015_noardo_abs.pdf (در 17 ژانویه 2017 قابل دسترسی است).
- Hao Men، Biruk Gebre، Kishore Pochiraju ثبت ابر نقطه رنگی با الگوریتم 4 بعدی ICP. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد رباتیک و اتوماسیون، شانگهای، چین، 9 تا 13 مه 2011.
- پل، بی جی; McKay, ND روشی برای ثبت اشکال سه بعدی. در IEEE Transaction on Pattern Analysis and Machine Intelligence ; IEEE Computer Society: Los Alamitos، CA، USA، 1992; صص 239-256. [ Google Scholar ]
- چن، ی. جرارد، ام. مدلسازی شی با ثبت تصاویر چند دامنه. در محاسبات بینایی تصویر ؛ Butterworth-Heinemann: Newton، MA، USA، 1991; صص 145-155. [ Google Scholar ]
- Zhang, Z. تطبیق نقطه تکراری برای ثبت منحنیها و سطوح آزاد. بین المللی جی. کامپیوتر. Vis. 1994 ، 13 ، 119-152. [ Google Scholar ] [ CrossRef ]
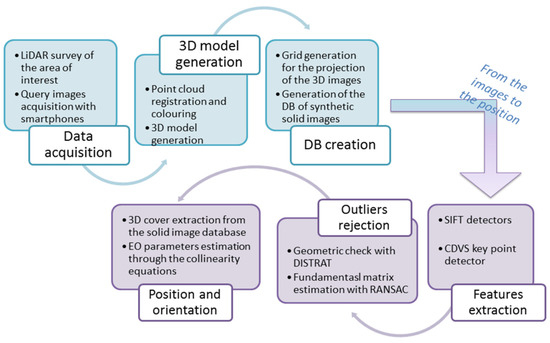
شکل 1. گردش کار رویه مکان مبتنی بر تشخیص تصویر (RBL).

شکل 2. ساختار RGB-D.

شکل 3. نمونه ای از تعریف جهت های محور RGB-D برای هر موقعیت.
شکل 4. حوزه انتخاب برای تولید تصویر RGB-D.
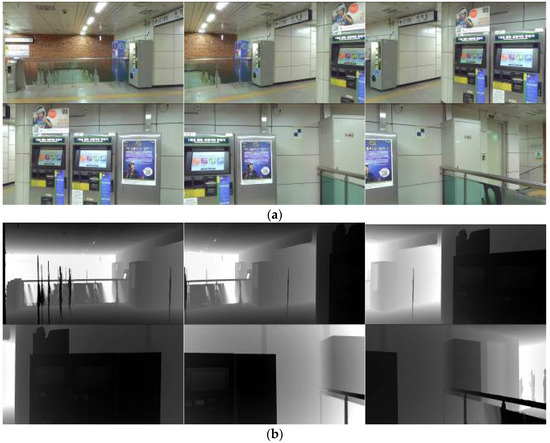
شکل 5. ( الف ) نمونه ای از شش تصویر RGB-D تولید شده با نرم افزار ScanToRGBDImage در تجسم RGB. و ( ب ) مثالی از شش تصویر RGB-D در تجسم نقشه عمق.

شکل 6. ( الف ) نمای داخلی Bangbae ایستگاه. و ( ب ) یک راهرو معمولی در ساختمان ETRI.
شکل 7. ( الف ) کسب GNSS. ( ب ) اندازه گیری کل ایستگاه. و ( ج ) نمونه ای از دو نشانگر قرار گرفته در ناحیه مورد بررسی.
شکل 8. ( الف ) نماهای آینده نگر. و ( ب ) نمای سه بعدی از ابر نقطه کامل ایستگاه Bangbae.

شکل 9. ( الف ) نمای جانبی. و ( ب ) نمای سه بعدی ابر نقطه ساختمان ETRI.
شکل 10. ( الف ) نمونه ای از تصویر RGB در Bangbae. و ( ب ) تصویر محدوده مربوطه. ( ج ) یک مثال در ساختمان ETRI. و ( د ) تصویر محدوده مربوطه.

شکل 11. برخی از تصاویر صفحه شطرنجی که توسط یک گوشی هوشمند برای کالیبراسیون دوربین به دست آمده است.
شکل 12. ( الف ) استخراج مختصات GCP از داده های LiDAR. و ( ب ) اندازه گیری GCP در Erdas.
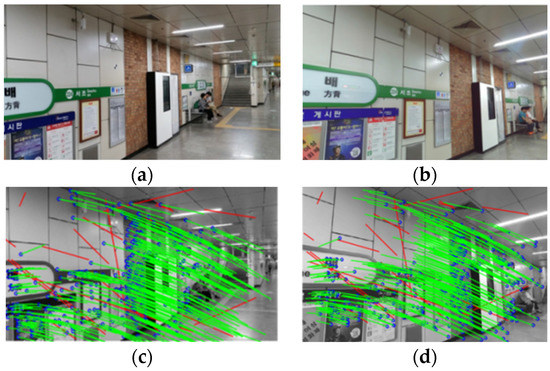
شکل 13. یک راه حل خوب برای ایستگاه Bangbae، تصویر 17: ( الف ) تصویر پرس و جو. ( ب ) تصویر مرجع از DB. ( ج ) تصویر پرس و جو؛ و ( د ) تصویر مرجع با نقاط مشخصه استفاده شده. نقاط منطبق که رد شده اند قرمز هستند.


شکل 14. نمونه ای از راه حل بسیار خوب برای ایستگاه Bangbae، تصویر شماره 8: ( الف ) تصویر پرس و جو. ( ب ) تصویر مرجع از DB. ( ج ) تصویر پرس و جو؛ و ( د ) تصویر مرجع با نقاط مشخصه استفاده شده. نقاط منطبق که رد شده اند قرمز هستند.

شکل 15. ( الف ) بدترین راه حل برای ساختمان ETRI به دلیل تعداد کم نقاط مشخصه که نسبتاً نزدیک هستند. و ( ب ) بدترین راه حل در Z برای ساختمان ETRI به دلیل شباهت تصویر از طبقات مختلف.

جدول 1. پارامترهای کالیبراسیون داخلی.
جدول 2. نتایج استخراج تصویر مرجع از DB تصویر ایستگاه Bangbae با استفاده از CDVS.
جدول 3. نتایج استخراج تصویر مرجع از تصویر DB ساختمان ETRI با استفاده از CDVS.
جدول 4. دقت در ایستگاه Bangbae با سامسونگ A5.
جدول 5. دقت در ایستگاه Bangbae با سامسونگ S5.
جدول 6. دقت در ساختمان ETRI با Samsung Galaxy S7 Edge.
جدول 7. تجزیه و تحلیل قابلیت اطمینان در مجموعه داده های ایستگاه Bangbae.
© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر