


چکیده
:
موقعیت های زیادی وجود دارد که در آنها استفاده از یک سیستم موقعیت یابی محلی (LPS) مطلوب است که یک واحد کامل و مستقل را تشکیل می دهد، دقت بالایی ارائه می دهد و علاوه بر آن تحقق آن مقرون به صرفه است. این مقاله LPS LOSNUS (محلی سازی گره های حسگر توسط صدای اولترا) را توصیف می کند. LOSNUS یک LPS کامل و مستقل است که می توان از همان سیستم برای محلی سازی و کالیبراسیون استفاده کرد. در اصل برای مکان یابی دستگاه های شبه استاتیک متعدد طراحی شده است، مراقبت ویژه از ساخت سیستم عوامل پرهزینه ای را به خود اختصاص داده است، به ویژه در ساخت زیرساخت و گره های حسگر که مکان یابی می تواند با حداقل هزینه های سخت افزاری اضافی محقق شود. LOSNUSفرآیند کالیبراسیون را بدون نیاز به ابزارهای گران قیمت اضافی و/یا زمان پر زحمت برای بدست آوردن موقعیت دقیق فرستنده ها امکان پذیر می کند. در نتیجه، LOSNUS دقت مکانیابی بالایی را در نرخهای بهروزرسانی متوسط ارائه میکند، و در صورت وجود تعداد کافی فرستنده، همچنین میتواند شکستهای منفرد را در اندازهگیری زمان رسیدن (ToA) تحمل کند و حالتهای شکست دلخواه را امکانپذیر کند. در این مقاله، سیستم با شروع طراحی، تحقق و الگوریتم های بومی سازی و کالیبراسیون ارائه شده است. در نهایت، نتایج اندازهگیری جدید، دقت بالای محلیسازی را بر اساس بحث در مورد توصیف عدم قطعیت اعمال شده نشان میدهد.
کلید واژه ها:
محلی سازی سه بعدی ؛ ToA ; TDoA ; کالیبراسیون ; LPS
1. مقدمه
محلیسازی فضای داخلی یک زمینه تحقیقاتی مداوم است که هر ساله در حال توسعه یافتن جدید از سختافزار، الگوریتمهای تخمین موقعیت، روشهای کالیبراسیون و برنامههای کاربردی است. در دهه گذشته، سیستم های موقعیت یابی محلی (LPS) مبتنی بر سونوگرافی (US) ایجاد شده است که بیشتر برای مکان یابی وسایل و افراد متحرک در نظر گرفته شده است. با این حال، مکان یابی دستگاه های شبه استاتیک متعددی که در یک شبکه یکپارچه شده اند نیز مهم است، جایی که مکان یابی ایالات متحده با دقت بالا مزایای قابل توجهی را برای این سیستم ها ارائه می دهد. یک شبکه حسگر بی سیم (WSN) با گره های متعدد می تواند به عنوان مثال استفاده شود. بسیاری از برنامه های کاربردی اختصاص داده شده به WSN را می توان با مکان یابی گره به طور قابل توجهی بهبود بخشید، به عنوان مثال، یکپارچه سازی گره ها در شبکه، مکان های نود عرضه به برنامه های کاربردی، نظارت بر مکان ها با توجه به جابجایی تصادفی،1 ، 2 ]. چندین مفهوم طراحی برای سیستم های مکان یابی ایالات متحده ارائه شده است. مفاهیم این سیستم ها تحت تاثیر طیف وسیعی از پارامترها است که در ادامه به اختصار به آنها پرداخته خواهد شد. برای بحث دقیق تر در مورد این موضوع، خواننده علاقه مند به [ 3 ] مراجعه می کند که در این بخش مهم ترین ویژگی ها خلاصه می شود.
به منظور یافتن مکانهای دستگاه، سیستمها اندازهگیریهای زمان پرواز (ToF) یا تفاوت زمان رسیدن (TDoA) را با موقعیتهای فانوس دریایی معروف انجام میدهند. مزیت استفاده از یک سیستم TDoA این است که همگام سازی بین دستگاه های فرستنده و گیرنده مورد نیاز نیست، بنابراین با اجتناب از کانال ارتباطی دوم، به عنوان مثال، با انتقال فرکانس رادیویی یا استفاده از یک پیوند مادون قرمز، هزینه های سیستم کاهش می یابد. سپس اندازهگیریهای ToF و TDoA را میتوان با اندازهگیری فاصله و فاصله فاصله با استفاده از سرعت صوت که در هوای خشک در دمای ۲۰ درجه سانتیگراد (۶۸ درجه فارنهایت) ۳۴۳.۲ متر بر ثانیه است، مرتبط کرد. سپس مکانها را میتوان با سه یا چندلایهسازی به ترتیب برای مورد ToF و TDoA بدست آورد. از آنجایی که سرعت صوت با ~0.6 m/s/°C تغییر می کند، یک LPS با هدف دقت بالا به روشی برای جبران تغییرات در سرعت صوت نیاز دارد، به عنوان مثال،
یکی دیگر از تصمیمات طراحی بسیار اساسی این است که آیا دستگاه واقع شده سیگنال ایالات متحده را ارسال می کند و بیکن ها سیگنال را دریافت می کنند یا برعکس. این یک تصمیم طراحی حیاتی در هنگام در نظر گرفتن مکان یابی دستگاه های متعدد است. اگر دستگاه های محلی به طور فعال پالس های ایالات متحده را ارسال می کنند، یک پروتکل دسترسی رسانه مورد نیاز است که در آن روش دسترسی چندگانه تقسیم کد (CDMA) و روش دسترسی چندگانه تقسیم زمانی (TDMA) رایج ترین آنها هستند. به طور متوسط مقیاس پذیری چنین سیستم هایی نسبتاً محدود است. اگر دستگاههای محلی غیرفعال هستند و چراغها در حال ارسال هستند، یک دنباله مکانیابی واحد امکان مکانیابی همه دستگاهها را به صورت موازی میدهد. نرخ مکان یابی فقط به سرعت تکرار توالی بستگی دارد که در آن اجتناب از برخورد سیگنال های ایالات متحده دوباره توسط CDMA یا TDMA اجرا شود.
مشترک همه سیستم های LPS این است که موقعیت چراغ ها باید تعیین شود. این فرآیند کالیبراسیون LPS نامیده می شود و می تواند به صورت دستی با ایجاد یک سیستم مختصات و اندازه گیری موقعیت های چراغ یا با یک الگوریتم کالیبراسیون خودکار انجام شود. دقت نهایی یک LPS همیشه ترکیبی از دقت محلی سازی و دقت موقعیت های بیکن است. اگر قضاوت کمی در مورد دقت سیستم مورد نظر باشد، باید دقت شود که اجزای سیستماتیک و تصادفی منفرد را بتوان به صورت جداگانه ارزیابی کرد.
2. کارهای مرتبط
دو نوع پیکربندی سیستم را می توان با نقش گره های متحرک تشخیص داد. در یک LPS فعال، گره های متحرک اولتراسوند (US) منتشر می کنند و بیکن ها گیرنده هستند. این مورد برای مثال در BAT [ 4 ]، پیشگام LPS ایالات متحده، و SnoW Bat اخیراً توسعه یافته [ 5 ] است. به طور متوسط، مقیاس پذیری چنین سیستم هایی نسبتاً محدود است زیرا تعداد سیگنال های ارسالی همزمان SNR را کاهش می دهد. به عنوان مثال، [ 6] گزارش داد که برای بیش از 16 فرستنده همزمان، میزان خطای بیت قبلاً به شدت کاهش یافته بود و دیگر اجازه شناسایی صحیح فرستنده را نمی داد. اگر دسترسی همزمان امکان پذیر نباشد (یا دیگر) امکان پذیر نباشد، نرخ مکان یابی شروع به کاهش می کند و با تعداد گره ها نسبت معکوس دارد. این قبلاً در [ 7 ] برای سیستم Active Bat مورد بحث قرار گرفته است که در آن راهحلهای پیچیده برای افزایش پیچیدگی و هزینه سیستم ضروری هستند. برخلاف دو سیستم قبلی، کریکت [ 8 ، 9 ]، اولین BLUPS [ 10 ] و سایر سیستمها [ 11 ] از بیکنهای انتقال و گرههای دریافت استفاده میکنند. خطاهای موقعیت گزارش شده کمتر از 9 سانتی متر برای BAT [ 4 ]، کمتر از 1.5 سانتی متر برای SnoW BAT [4] است.5 ]، 30 سانتی متر برای کریکت V1 [ 9 ]، 1 سانتی متر برای کریکت V2 [ 9 ]، و 1.5 سانتی متر برای BLUPS [ 10 ].
روش زمان پرواز (ToF) برای اندازهگیری محدوده برای ارائه مکانیابی ریزدانه در [ 4 ، 5 ، 8 ، 9 ، 10 ] استفاده میشود. سیستمی که از تفاوت های زمانی ورود (TDoA) استفاده می کند [ 6 ] است. استحکام در برابر خرابیهای مختلف در اندازهگیریهای ToF/TDoA یک جنبه مهم است زیرا انسدادهای سبک وزن در اطراف گیرنده اثرات خمشی و انکساری را ایجاد میکنند و میتوانند خطای تا 5٪ را ایجاد کنند [ 12 ]. خطاهای Non Line of Sight (NLoS) با اندازه های مختلف جسم و موقعیت می تواند بین 10٪ و 100٪ باشد [ 12 ]]. همچنین مشخص است که الگوریتم سنتی حداقل مربعات چند بعدی نتایج نادرستی ارائه می دهد اگر یک خطا در فواصل اندازه گیری شده وجود داشته باشد [ 13 ]. به عنوان مثال [ 12 ] از حداقل میانه مربع ها (LMedS) استفاده کرد که عملکرد بهتری را در مورد سیگنال های NLOS ارائه می دهد.
برای دستیابی به دقت بالا در LPS، کالیبراسیون از اهمیت بالایی برخوردار است زیرا موقعیت صحیح بیکن ها مستقیماً بر دقت تأثیر می گذارد. این بدیهی است زیرا این موقعیت ها در فرمول های چندلایه استفاده می شود. روشهای کالیبراسیون متفاوتی پیشنهاد شدهاند: در [ 14 ]، گیرندههای نصبشده در سقف توسط فرستندهای که به حداقل پنج نقطه مختصات شناختهشده حرکت میکند، کالیبره شدند. DOLPHIN [ 15 ] یک سیستم موقعیت یابی توزیع شده با هدف برنامه های محاسباتی همه جا حاضر است. این تکنیکهای چندلایهای تکراری را اعمال میکند که در آن سه موقعیت دقیق دستگاهها باید به عنوان حالت اولیه تعریف شوند. یک الگوریتم کالیبراسیون خودکار همچنین به سه نقطه آزمایش شناخته شده برای مورد ToF و TDoA در [ 11 ارائه شده است.]. بسته به بودجه موجود می توان از انواع مختلف دستگاه های اندازه گیری مطابق با [ 11 ، 14 ، 15 ] استفاده کرد. اگر از دستگاه های کم هزینه استفاده شود، به عنوان مثال، نوارهای اندازه گیری ساده، تقریباً همیشه دقت مکان نهایی را کاهش می دهد. یک سیستم برچسب سه بعدی سبک وزن با استفاده از یک دستگاه کالیبراسیون در [ 16 ] نشان داده شده است که در آن میانگین خطا بسته به روش مورد استفاده بین 19.5 سانتی متر تا 23.9 سانتی متر بود.
یک الگوریتم کالیبراسیون خودکار که نیازی به دستگاه های اضافی توسعه یافته برای LPS [ 17 ] ندارد، بر اساس الگوریتم برازش حداقل مربعات غیرخطی چند بعدی است. در [ 18 ] یک روش خود کالیبراسیون دو مرحله ای پیشنهاد شده است که در صورت کافی بودن موقعیت های نسبی به هیچ موقعیت از پیش کالیبره شده ای نیاز ندارد. برای انجام این کار، به هیچ سخت افزار اضافی علاوه بر گیرنده ها یا فرستنده ها و فرستنده های رادیویی ایالات متحده، که از قبل برای یک WSN در دسترس هستند، نیاز نیست. با شبیه سازی به دقت موقعیت بسیار خوبی در محدوده میلی متری دست یافت.
تأیید کالیبراسیون با مقایسه با کالیبراسیون دستی مانند [ 11 ] به دلیل عدم توانایی در ایجاد یک سیستم مختصات متعامد توصیه نمی شود. تنها کمیتی که به راحتی قابل بررسی است، فاصله نقطه به نقطه است اما مختصات منفرد به دلیل عدم وجود بردارهای وحدت سیستم مختصات نیست. قابل توجه است که میانگین انحراف تنها 2.2 سانتی متر در [ 11 ] به دست آمده است.
این مقاله LPS LOSNUS (محلی سازی گره های حسگر توسط اولترا صدا) [ 3 ] را به عنوان یک LPS کامل و مستقل توصیف می کند که در آن می توان از همان سیستم برای کالیبراسیون و محلی سازی استفاده کرد. این یک فرآیند کالیبراسیون را بدون ابزارهای گران قیمت و/یا زمان پر زحمت برای به دست آوردن موقعیت دقیق چراغ ها امکان پذیر می کند. LOSNUS دقت مکان یابی بالایی را ارائه می دهد و همچنین می تواند شکست های منفرد را برای اندازه گیری های ToA تحمل کند که امکان حالت شکست دلخواه را فراهم می کند. هزینه کم و دقت بالا از ویژگی های مهم این سیستم است.
3. LOSNUS
3.1. منطق طراحی LOSNUS
قبل از توضیح اجزای جداگانه LPS LOSNUS ، منطق طراحی ارائه شده است. به عنوان LOSNUSبرای مکان یابی تعداد زیادی گره عمدتا ساکن طراحی شده است، دستگاه های واقع شده به عنوان گره های غیرفعال انتخاب می شوند و چراغ ها برای بهترین مقیاس پذیری فعال هستند. اندازه گیری های TDoA به جای ToF انتخاب شده اند تا از نیاز به سیگنال ماشه بین فرستنده و گیرنده جلوگیری شود که در غیر این صورت پیچیدگی و هزینه گیرنده را افزایش می دهد. اندازهگیری دقیق موقعیتهای دستگاه در صورتی که دستگاهها در نزدیکی باشند به ویژه در صورت اندازهگیری همان مقدار (آرایه) مهم است. بنابراین استفاده از سیگنالهای باند پهن که امکان استفاده از تکنیکهای فشردهسازی پالس را فراهم میکند، یک انتخاب منطقی است. چنین تکنیک هایی نیازمند تلاش بیشتر در سمت پردازش سیگنال در گیرنده هستند و بنابراین پیچیدگی و تعداد آنها باید کم نگه داشته شود. به همین دلیل LOSNUSفقط از یک صدای فرکانس خطی مدوله شده استفاده می کند که زمان رسیدن سیگنال را با کد فرستنده زیر مشخص می کند. برای جلوگیری از مشکلات در مورد سیگنال های ارسال موازی LOSNUSاز دنباله ای از بیکن های ارسالی استفاده می کند که از همپوشانی سیگنال های خط دید (LOS) جلوگیری می کند، اما با این وجود نرخ مکان یابی سریع متوسطی را ارائه می دهد. از آنجایی که سیگنالهای غیر خط دید (NLOS) معمولا ضعیفتر از سیگنالهای LOS هستند، در اکثر مواقع یک SNR خوب به دست میآید. فرستنده ها با استفاده از فیلدهای رمزگذاری فرستنده فرکانس ثابت شناسایی می شوند. یک مزیت اضافی با ارسال غیر موازی به دست می آید زیرا در صورت استفاده از یک دم مولتی پلکسر کم هزینه، می توان از تقویت کننده مشابه برای همه بیکن های ارسال کننده استفاده کرد. این امر به ویژه در مورد مبدل هایی که به ولتاژ حرکتی بالا و/یا پهنای باند زیاد نیاز دارند، مهم است، زیرا این تقویت کننده ها بسیار گران هستند. کاهش هزینه بیشتر با استفاده از همبستگی باینری 1 بیتی در گیرنده ها امکان پذیر است که امکان استفاده از رابط های سریال همزمان موجود در میکروکنترلرهای مدرن برای نمونه برداری سیگنال را فراهم می کند. بنابراین یک گیرنده را می توان با یک میکروفون MEMS اولتراسونیک کم هزینه، یک پیش تقویت کننده کوچک، یک فیلتر باند گذر و یک رابط مقایسه کننده 1 بیتی که به میکروکنترلر متصل است، شناسایی کرد. یک برنامه افزودنی برای کاربردهای کم مصرف، یک دنباله شروع اختیاری است که اجازه می دهد تا میکروکنترلر هنگام شروع یک دنباله مکان یابی، بیدار شود. نیاز به حافظه و پیچیدگی محاسباتی روی گیرنده را می توان با استفاده از یک ورودی کوتاه برای هر یک کاهش دادزمان فریم LOSNUS مهر زدن دریافت و شروع نمونه برداری از قاب LOSNUS . هزینه های مورد انتظار ساخت سیستم در مقادیر حجمی زیر 5 دلار برای گیرنده ها است.
کالیبراسیون LOSNUS را می توان به طور مستقیم با بیکن های نصب شده و آرایش گیرنده ویژه انجام داد. برای دستیابی به دقت بالای محلیسازی بیکن، گیرندههای مورد استفاده با توالی انتقال همگام میشوند که با یک لینک سیمی قابل تحقق است. این اصلاح به منظور دستیابی به همگرایی بهتر الگوریتم کالیبراسیون امکان اندازه گیری ToF ها را می دهد. از آنجایی که کالیبراسیون فرآیندی یکباره است و تا زمانی که فرستندهها جابهجا نشوند معتبر میماند، این اقتصادیترین راهحل است. تأیید بیشتر کالیبراسیون دوره را می توان در سیستم TDoA نیز انجام داد.
3.2. اصل اساسی LOSNUS
ساختار اصلی سیستم در شکل 1 نشان داده شده است . چندین چراغ انتقال فعال در موقعیت های اتاق به خوبی تعریف شده ثابت می شوند.
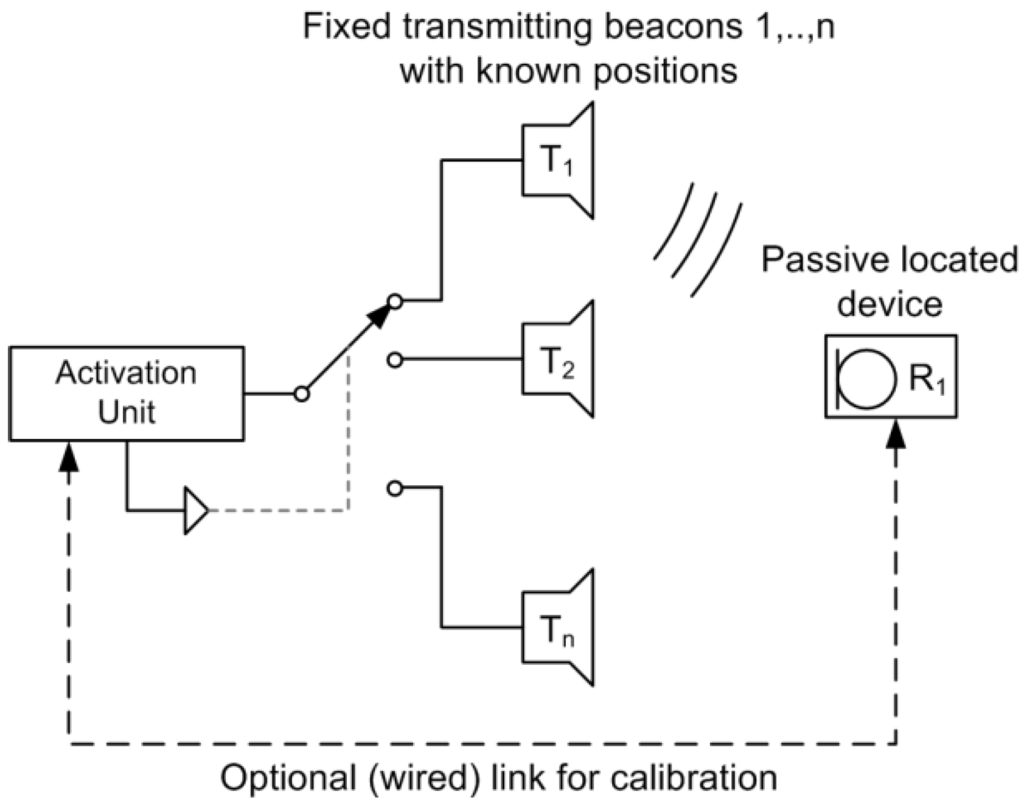
شکل 1. محلی سازی پایه گره های حسگر توسط معماری سیستم Ultra Sound ( LOSNUS ).
فرآیند مکان یابی LOSNUS توسط یک دنباله به خوبی تعریف شده از فریم های سیگنال ایالات متحده نشان داده شده در شکل 2 a آغاز می شود. یک واحد فعال سازی به طور متوالی هر فرستنده را فعال می کند و در قاب متشکل از یک ورودی اختیاری، یک صدای چیپ مدوله شده با فرکانس خطی و یک فیلد کدگذاری فرستنده که در شکل 2 ب نشان داده شده است، ساطع می کند. یک دنباله شروع اختیاری را می توان برای سیستم های کم توان استفاده کرد که امکان بیدار شدن از راه دور واحدهای گیرنده را فراهم می کند. تأخیرهای ارسال به گونه ای انتخاب می شوند که سیگنال های LOS فرستنده های متوالی در گیرنده ها همپوشانی نداشته باشند. در صورت همپوشانی سیگنال های LOS و NLOS، رمزگشایی کامل سیگنال LOS بزرگتر رایج است [ 19 ]. همبستگی متقابل باینری [ 20 ، 21] فریم دریافتی با سیگنال مرجع، اندازه گیری های ToA با وضوح بالا را ارائه می دهد. هنگامی که شروع فریم مشخص شد، میدان کدگذاری فرستنده به راحتی قابل تجزیه و تحلیل است. فرستنده ها با استفاده از یک طرح کدگذاری فرکانس ثابت کدگذاری می شوند که در آن تعداد فرستنده ها با تعداد پرش های فرکانس و اسلات های استفاده شده مقیاس پذیر است. بنابراین، این مفهوم با N-FSK قابل مقایسه است. پردازش سیگنال و شناسایی فرستنده با جزئیات بیشتر در بخش 3.3 و بخش 3.4 توضیح داده شده است .
فرآیندی که در بالا توضیح داده شد، جفتهای متعددی از ToA و شناسههای فرستنده را ارائه میکند که همیشه اولین جفت مطابق با سیگنال LoS انتخاب میشود. سپس موقعیت مختصات با استفاده از چند لایه محاسبه می شود.
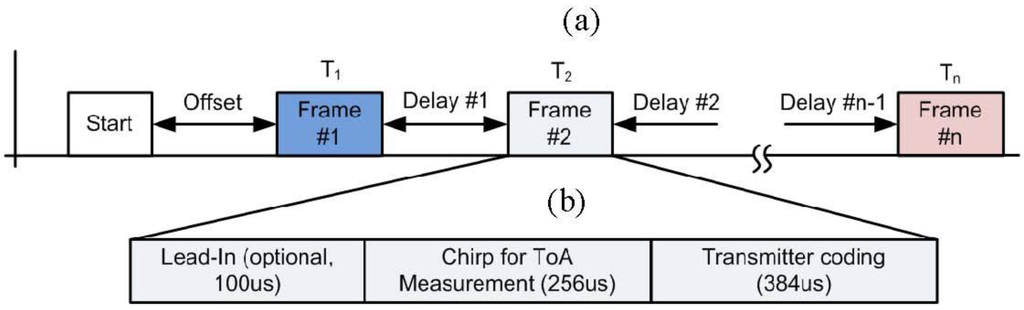
شکل 2. عملیات مکان یابی: دنباله انتقال ( a )، فریم های ارسالی ( b ).
3.3. پردازش سیگنال
پردازش سیگنال برای سیستمهای ToF یا ToA یک مصالحه در سه عامل است: محدوده، وضوح و نرخ تکرار. برای وضوح، دو جنبه مهم است: اولی جداسازی دو هدف نزدیک است که توسط ΔR ≤ c/(2B) محدود می شود که در آن c سرعت انتشار موج و B پهنای باند است [ 22 ]. جنبه دوم عدم قطعیت برآوردهای ToF یا ToA است که در آن تکنیکهای مختلفی از جمله انواع تخمینگرها مانند همبستگی متقاطع کلاسیک (CC)، همبستگی متقابل تعمیمیافته (GCC)، حداکثر احتمال (ML)، فیلترهای تطبیقی حداقل میانگین مربع (LMS) در دسترس هستند. و دیگران [ 23]. علاوه بر این، نرخ نمونه سیستم، اگر کم باشد، می تواند به استفاده از روش های درون یابی نیاز داشته باشد. الگوریتمهای ساده شامل درونیابی سهمی توابع همبستگی هستند که در آن الگوریتمهای پیچیدهتر از انواع مختلف تبدیل یا روشهای نمونهبرداری بالا استفاده میکنند [ 24 ]. LOSNUS از یک چیپ مدوله شده با فرکانس خطی با همبستگی متقاطع باینری با نرخ نمونه بالا استفاده می کند.
یک چیپ مدوله شده با فرکانس خطی را می توان به عنوان سیگنال واقعی شکل موج تحلیلی مطابق با رابطه (1) نوشت که در آن T مدت زمان سیگنال است. تابع rect مانند [ 22 ] تعریف شده است و اگر |t| باشد صفر است ≥ T/2 و 1 در غیر این صورت. کل جاروب فرکانس kT = Δ است.

یک ویژگی بسیار مهم برای چیپ، ضریب پراکندگی یا بهره پردازشی D = TΔ است. بهره پردازش، بهره در اوج تابع همبستگی خودکار برای یک پالس با وضوح محدوده مساوی است. علاوه بر این، می توان نشان داد که برای مقادیر بزرگتر D، دامنه طیفی سیگنال چیپ تقریباً یک پنجره مستطیلی با عرض Δ است. با این حال، حتی برای مقادیر D کمتر از 10، حدود 95 درصد انرژی در باند Δ [ 22 ] موجود است.
همبستگی دودویی برای یک سیگنال ورودی گسسته r[n] با 0 ≤ n ≤ N و یک سیگنال مرجع s[m] با 0 ≤ m ≤ M – 1 طبق رابطه (2) محاسبه می شود. هر دو سیگنال ورودی می توانند به ترتیب دارای مقادیر +1 و -1 باشند. تعداد محاسبات مورد نیاز N·M است. از آنجایی که هر دو سیگنال باینری هستند، پیاده سازی کارآمد و سریع امکان پذیر است.
مهمترین ویژگی های یک صدای جیر جیر خطی با تنظیمات مورد استفاده در LOSNUS در شکل 3 a,b نشان داده شده است. شکل 3 a چیپ کوانتیزه 1 بیتی نظری و شکل 3 b شکل موج دودویی و تابع همبستگی خود را نشان می دهد.
LOSNUS در این راهاندازی از مبدلهای الکترواستاتیک باند پهن از Senscomp استفاده میکند که امکان انتقال چنین سیگنالهایی را فراهم میکند. یکی از مشکلاتی که در طول طراحی سیستم با آن مواجه شد، ناحیه پوشش بود زیرا مبدلهای باند پهن دارای الگوی تابش وابسته به فرکانس هستند. سیگنالهای حاصل از جهتهای خارج از لوب اصلی به شدت در فاز/دامنه تغییر میکنند و همبستگی میتواند بیش از 50 درصد کاهش یابد [ 25 ]. به همین دلیل یک مخروط کوچک به حسگرهای مشابه [ 26 ] متصل شده است. نمودارهای جهت دهی حاصل قبل و بعد از اصلاح در شکل 4 a,b نشان داده شده است.

شکل 3. ( الف ) صدای چیپ مدوله شده با فرکانس خطی کوانتیزه شده 1 بیتی با Δ = 25 کیلوهرتز، f 0 = 52.5 کیلوهرتز و T = 256 میکرو ثانیه. ( ب ) تابع خودهمبستگی باینری ( D نظری = 6.4).

شکل 4. ( الف ) نمودار هدایت بدون مخروط متصل مبدل الکترواستاتیک Senscomp 600. ( ب ) نمودار جهت دهی پس از اعمال مخروط.
با اتصال مخروط، شکل موج در شکل 5 a با استفاده از چیپ مدوله شده با فرکانس خطی از شکل 3 a با دامنه حرکتی 160 Vpp و بایاس DC 100 ولت ثبت شد. با استفاده از سیگنال شکل 5 a در باینری 1 بیتی آن. نمایش کوانتیزه شده خودهمبستگی آن در شکل 5 ب نشان داده شده است. نتایج هنوز رضایت بخش هستند و افزایش عملکرد در مقایسه با انفجار به راحتی قابل مشاهده است. برای مقایسه، در شکل 5 ، طول انفجار برابر با صدای جیر جیر بود، زیرا اندازه گیری یک پالس کوچک دشوارتر است. از آنجایی که طول سیگنال تنها 256 میکرو ثانیه و نرخ نمونه 5 MS FFT است، وضوح فرکانس پایین است و طیف شکل موج در شکل 5a نشان داده نشده است.
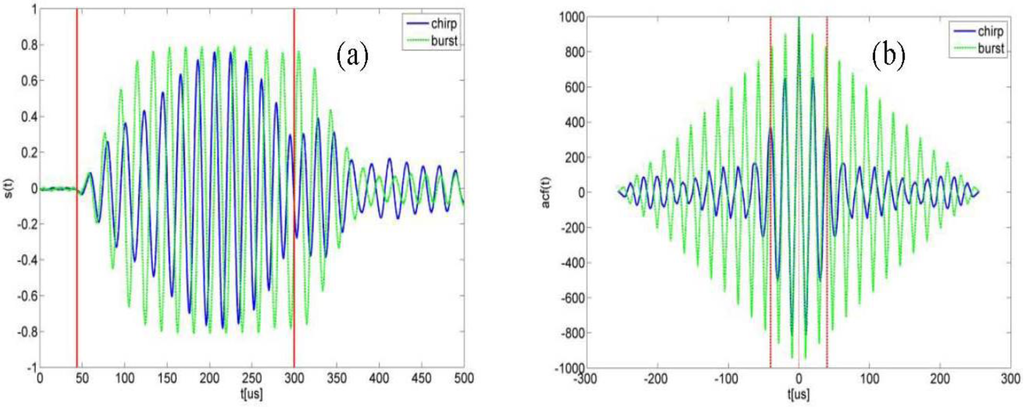
شکل 5. ( الف ) شکل موج دریافتی (آنالوگ) برای انفجار با f 0 = 52.5 کیلوهرتز و صدای چیپ با تنظیمات شکل 3 . ( ب ) تابع خودهمبستگی باینری که خواص فشردهسازی پالس صدای چیپ را در مقایسه با انفجار نشان میدهد.
3.4. شناسایی فرستنده
کدگذاری فرستنده به عنوان یک کدگذاری فرکانس ثابت با شکاف های زمانی متعدد تحقق می یابد. از آنجایی که زمان شروع سیگنال به دلیل فشرده سازی پالس صدای جیر جیر قبلی مشخص است، دمودولاسیون منسجم N-FSK می تواند انجام شود. باز هم، پیچیدگی محاسباتی کم است، زیرا شناسایی فقط باید در پژواک های شناسایی شده انجام شود و سیگنال ها دوباره یک بیت کوانتیزه می شوند. علاوه بر این، در صورتی که فریم های دریافتی با تشخیص یک پیک همبستگی یا توسط سیگنال ورودی ذخیره شوند، پردازش را می توان روی داده های آفلاین انجام داد. به عنوان مثال، در تنظیمات آزمایشی با طول کل فریم 740 میکرو ثانیه (100 میکروثانیه ورودی ورودی، 256 میکروثانیه صدای جیر جیر و 384 میکرو ثانیه رمزگذاری فرستنده)، الزامات ذخیره سازی برای یک فریم تنها 740 بیت یا 93 بایت است. در مورد شش فرستنده و با فرض حداکثر 5 پژواک NLOS برای هر سیگنال، کل نیاز ذخیره سازی 2 است. 79 کیلوبایت. این امر حتی در میکروکنترلرهای بسیار کم هزینه نیز معقول است.
ساختار اصلی رمزگشایی در شکل 6 الف نشان داده شده است. سیگنال ورودی باینری در فرکانس های مختلف ضرب می شود و پایین گذر فیلتر می شود. حداقل طول مورد نیاز فیلتر در صورت دمودولاسیون منسجم 1 تقسیم بر فاصله فرکانس است. دانستن زمان شروع فریم برای ارزیابی خروجی فیلتر در ضرب های گسسته طول نماد کافی است. نمونه ای از یک اندازه گیری واقعی که در آن از شش فرکانس کدگذاری و دو نماد استفاده شده است در شکل 6 ب نشان داده شده است. این در حال حاضر اجازه می دهد تا حداکثر 36 فرستنده برای پوشش دادن اتاق های بزرگ کافی باشد.
پیچیدگی محاسباتی دوباره کم است و برای دنباله ای از طول M و n فرکانس کدگذاری فرستنده n · M حداکثر ضرب و جمع نیاز دارد. از آنجا که دنباله ورودی دوباره باینری است با مقادیر بین +1 و -1 ضرب به جمع مثبت یا منفی کاهش می یابد.
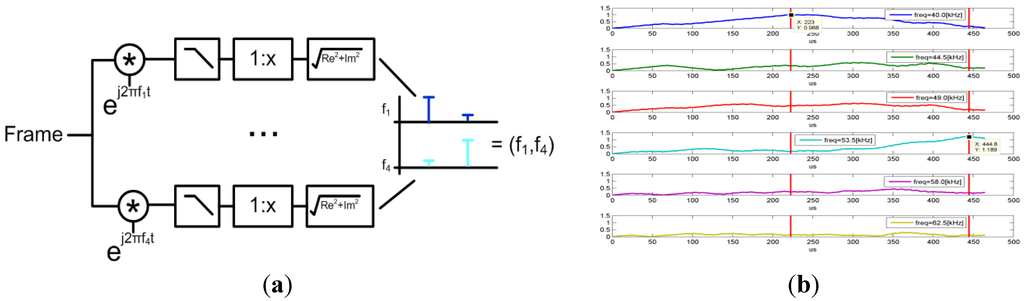
شکل 6. ( الف ) شناسایی فرستنده برای n فرکانس کدگذاری. مقادیر خروجی فیلتر فقط در زمانهای مجزا ارزیابی میشوند، زیرا زمان شروع فریم مشخص است. ( ب ) رمزگشایی نمونه فرستنده بر روی داده های ورودی باینری با استفاده از f i = 40 کیلوهرتز + 4.5 کیلوهرتز · i ، 0 ≤ i ≤ 5. فرستنده شناسایی شده (40 کیلوهرتز، 53.5 کیلوهرتز) است. خطوط عمودی قرمز نقاط نمونه برداری را مشخص می کنند.
3.5. بومی سازی
الگوریتم محلی سازی LOSNUS بر اساس TDoA است و به موقعیت های فرستنده کالیبره شده، تفاوت های زمانی و سرعت صوت به عنوان ورودی نیاز دارد. برای دو فرستنده T i و T j ، یک گیرنده R و ToAs t i و t j معادله اصلی TDoA در رابطه (3) آورده شده است که در آن c سرعت صوت است.

با داشتن سه معادله مربوط به چهار اندازه گیری ToA یک راه حل تحلیلی وجود دارد. یک پارامتر مهم برای یک سیستم محلی سازی، رقیق سازی دقت (DOP) [ 27 ] است که عدم قطعیت ToA را به عدم قطعیت مکان یابی مرتبط می کند. برای مثال اگر DOP 20 باشد، انحراف استاندارد اندازهگیریهای ToA 700 ns و سرعت صوت 343 متر بر ثانیه باشد، انحراف استاندارد تخمین موقعیت 20 · 700 ns · 343 m/s = 4.8 میلیمتر است. DOP به محل قرارگیری چراغ ها و موقعیت گیرنده بستگی دارد.
همانطور که در یک سیستم معمولی LOSNUS ، بیش از چهار فرستنده در دسترس است، افزونگی در داده ها می تواند برای افزایش استحکام روش مکان یابی استفاده شود. الگوریتم استفاده شده توسط LOSNUS گروه بندی نامیده می شود . داشتن شش (یا بیشتر) فرستنده و نیاز به چهار ToA برای محلی سازی پانزده ترکیب مختلف امکان پذیر است. اگر همه ترکیبهای ToA معتبر هستند، همه موقعیتهای محاسبهشده باید تقریباً یکسان باشند. اگر یکی از آنها نادرست باشد، تنها پنج یا چهار ترکیب ممکن تقریباً یکسان هستند و ده موقعیت باقیمانده متفاوت هستند. شکل 7 a نشان می دهد که اگر هیچ یک از ToA یک نقطه پرت نباشد، تمام پانزده راه حل نزدیک هستند. شکل 7b زمانی که یک ToA منفرد 1 سانتی متر تغییر کرده است راه حل ها را نشان می دهد. مشاهده میشود که موقعیتهای محاسبهشده توسط ترکیبهای صحیح، یعنی چهار بر پنج، هنوز درست هستند در حالی که بقیه متفاوت هستند.
در این شرایط، نه حداقل مربعات غیرخطی، و نه استفاده از میانگین یا میانه همه مختصات نمی تواند نتیجه درستی را ارائه دهد. الگوریتم گروههای متمایزی را ایجاد میکند در حالی که عناصر با مقیاس شباهت بر اساس محاسبه 2-هنجار تفاوتهای همه موقعیتها تعیین میشوند. گروهی که بیشترین کاردینالیته را داشته باشد انتخاب می شود. موقعیت نهایی یا با در نظر گرفتن میانگین همه موقعیتها در این گروه، با انتخاب عنصری با کمترین رقتسازی دقت (DOP) برای ترکیب فرستنده/گیرنده یا با اعمال یک الگوریتم NLS برای ToAهای صحیح محاسبه میشود.28 ]. در میان الگوریتمهای گروهبندی، NLS بهترین عملکرد را دارد، اگرچه تفاوتهای آماری در محدوده میلیمتر است. یک جنبه مهم، اما اثبات نشده این است که این الگوریتم مستلزم آن است که ترکیب هایی از جمله ToA اشتباه، گروه های بزرگتر از گروه صحیح را تشکیل ندهند. شبیه سازی و نتایج عملی به ما نشان داده است که واقعاً چنین است.
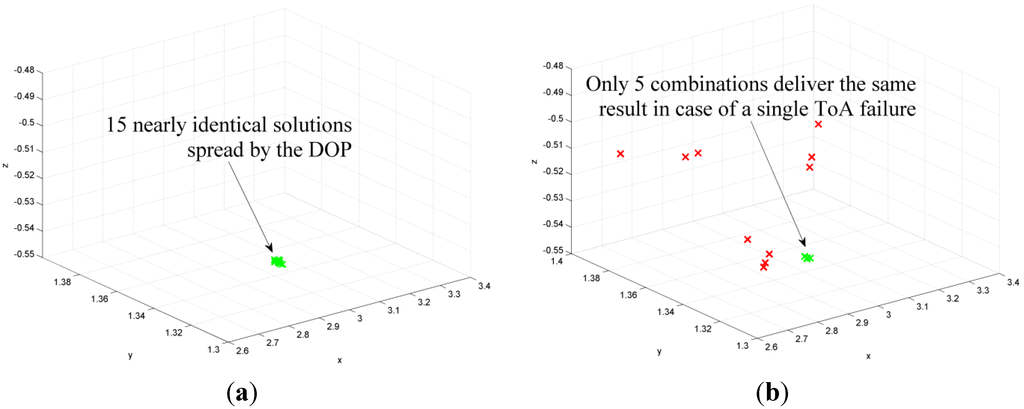
شکل 7. ( الف ) محاسبه موقعیت های گیرنده توسط هر پانزده ترکیب در صورت عدم وجود خطا. همه موقعیت ها نزدیک هستند و توسط DOP پخش می شوند. ( ب ) در مورد یک نقطه پرت تنها پنج ترکیب هنوز معتبر هستند و بقیه نتایج متفاوتی ارائه می دهند. خطای ToA فرضی برای این مثال 1 سانتی متر بود.
4. کالیبراسیون
کالیبراسیون یک LPS قبل از استفاده از سیستم برای بومی سازی گره های استاتیک یا دستگاه های تلفن همراه ضروری است. برخلاف محلیسازی، کالیبراسیون LOSNUS از ToF استفاده میکند و به حداقل چهار گیرنده، شش فرستنده و یک فاصله مرجع شناختهشده در شکل فعلی مورد استفاده نیاز دارد. استفاده از ToF مورد نیاز بود زیرا در غیر این صورت همگرایی الگوریتم کالیبراسیون رضایت بخش نبود.
کالیبراسیون با استفاده از شش فرستنده و چهار گیرنده انجام می شود که شش مختصات از 30 مختصات برای تعریف سیستم مختصات استفاده می شود. با استفاده از ToF و سرعت صوت 24 معادله را می توان یافت. با استفاده از الگوریتم های کمینه سازی مناسب، 24 مختصات مجهول را می توان به دست آورد. فرستنده ها ، c سرعت صوت و t ij ToF بین فرستنده i و گیرنده j باشد. سپس معادلات تعریف شده توسط 



به دلیل استفاده از مخروط ها برای پهن کردن لوب اصلی، موج صوتی دیگر مستقیماً بین فرستنده و گیرنده انتشار نمی یابد، بلکه ابتدا از فرستنده به سمت دهانه مخروط منتشر می شود. از آنجا به گیرنده انتشار می یابد. بنابراین، معادله قبلی باید همانطور که در رابطه (5) نشان داده شده است، اصلاح شود که در آن طول مخروط صوتی 1 است.

می توان نشان داد که اگر یک الگوریتم کمینه سازی معادله سیستم معادله (5) را حل کند، یک نسخه مقیاس شده از سیستم را نیز با یک عامل a حل می کند، به عنوان مثال ، یک بسط یا فشرده سازی هندسی.

این یک نتیجه مهم است زیرا صرف نظر از اینکه از کدام سرعت صوت استفاده شده است، نتیجه یک فرآیند کالیبراسیون یک نسخه مقیاسشده از سیستم فیزیکی با پیامد زیر است: فرض کنید r فاصله مرجع بین موقعیت گیرنده دلخواه باشد. سپس یک ضریب مقیاس بندی پست را می توان به عنوان محاسبه کرد
بنابراین ما مشکل دانستن دمای دقیق را با مشکل دانستن فاصله مرجع مبادله کرده ایم. توجه داشته باشید که هیچ محدودیتی در نوع فاصله مرجع وجود ندارد که تحقق را بسیار آسان می کند. در این سیستم مسیر مرجع با استفاده از گیرنده نصب شده بر روی تسمه خطی و تثبیت دو موقعیت محقق شده است. عدم قطعیت تسمه 50 میکرومتر در نظر گرفته شد زیرا دادههای ساخت کامل نبود.
الگوریتم کالیبراسیون را میتوان به صورت زیر خلاصه کرد: بر اساس حدسهای سرعت صوت، موقعیتهای گیرنده و فرستنده، یک الگوریتم کمینهسازی اجرا میشود که موقعیتهای Ti “، Ri ” و طول مخروط l” را ارائه میدهد. از آنجایی که سرعت صوت فقط نسبتاً صحیح بود، اما نه به طور مطلق، خروجی یک نسخه مقیاس شده از سیستم است. با محاسبه ضریب a مطابق با رابطه (7) موقعیت فرستنده و گیرنده مدرج نهایی و همچنین طول مخروط با

نتیجه مهم دیگر این است که کالیبراسیون انجام شده با این روش به دقت مسیر مرجع بستگی دارد. عدم قطعیت یک فرستنده (یا گیرنده) را می توان به صورت زیر تخمین زد:

برای سرکوب مولفه های تصادفی اندازه گیری های ToF لازم است میانگین گیری شود. مشکل میانگین گیری در مدت زمان طولانی این است که فرض شرایط اندازه گیری ثابت، به ویژه دما، واقع بینانه نیست. این مشکل را می توان با فرض پایداری سیستم مکانیکی و ثابت ماندن فواصل فیزیکی در طول فرآیند کالیبراسیون دور زد. از آنجایی که سرعت صوت یک فاکتور مقیاسپذیری ToF است، نسبتها باید ثابت بمانند. اندازهگیریهای چندگانه t i (k) در جایی انجام میشوند که ضریب مقیاسبندی c(k) با مجموع 24 ToF تعریف میشود، جایی که اولین اندازهگیری بهطور دلخواه به عنوان مرجع استفاده میشود.

اعمال چنین اصلاحی در هر اندازه گیری نسبت ها را حفظ می کند اما دما را جبران می کند. استفاده از تمام این تکنیکهای شرح داده شده در بالا منجر به کالیبراسیون با کیفیت بالا میشود و تناسب روش با شبیهسازیها و یک آزمایش عملی تأیید شد.
5. عدم قطعیت
5.1. ملاحظات عمومی
دقت مکان یابی بر اساس دو عامل است: دقت کالیبراسیون سیستم و دقت روش مکان یابی واقعی. این دو عامل کاملاً مستقل هستند زیرا دو روش متفاوت در مقاطع زمانی مختلف انجام می شوند. کالیبراسیون سیستم عملیاتی است که تنها یک بار پس از نصب سیستم انجام می شود. علاوه بر این، دقت کالیبراسیون محقق شده بر هر نتیجه مکان یابی تأثیر می گذارد زیرا دقت مکان یابی واقعی یک عامل اضافی است که دقت کلی را کاهش می دهد.
ادبیات مربوط به GPS و LPS اغلب معنای خود را از اصطلاحات “دقت” و “دقت” تعریف می کند، به عنوان مثال، [ 29 ]. در این تعاریف، دقت ترکیبی از اجزای سیستماتیک و تصادفی است در حالی که دقت بر اساس فاصله اطمینان است. این اشکالات متعددی دارد، زیرا نمی توان به طور جداگانه بین اجزای تصادفی و سیستماتیک تفاوت قائل شد. علاوه بر این، تعریف دقت زمانی که دقت بینهایت بالا باشد، مقدار صفر دارد. به این معنی این مقادیر نشان دهنده انحراف از مقادیر واقعی هستند.
راهنمای (“ارزیابی داده های اندازه گیری – راهنمای بیان عدم قطعیت در اندازه گیری”) [ 30 ]، که برای استفاده عمومی در اندازه گیری ها تعریف شده است و بر اساس اصطلاح “عدم قطعیت” است که فاصله ای است که حول اندازه گیری تنظیم شده است. نتیجه حاوی مقدار کمیت اندازه گیری شده است. “دقت بالا” که فقط معنای کیفی دارد و هیچ مقداری را نشان نمی دهد، با عدم قطعیت با طول بازه کم بیان می شود. اصطلاح «دقت» در GUM تعریف نشده است، اما در بیشتر موارد عبارتهای «جزء تصادفی اندازهگیری»، «تکرارپذیری» یا «تکرارپذیری» انتخاب بهتری هستند. در این مقاله از تعاریف GUM استفاده شده است.
5.2. عدم قطعیت در اندازه گیری های ToF و TDoA
با استفاده از همبستگی متقاطع دودویی برای اندازهگیریهای ToA/ToF با تنظیمات چیرپ شکل 3 ، مؤلفه تصادفی بهعنوان نرمال توزیع شده با انحراف استاندارد 400 ns یا با سرعت صوت در دمای اتاق حدود 140 میکرومتر مورد آزمایش قرار گرفت. مولفه تصادفی تابع پیچیدهای از نویز الکترونیکی، نویز خود میکروفون، نویز صوتی (حرکت براونی)، نرخ نمونهبرداری، طول و پهنای باند صدای چیپ استفادهشده است که همگی باید در اندازهگیری فوق جمعبندی شوند.
اندازهگیریهای ToF و ToA طبق رابطه (11) مدلسازی میشوند که در مورد ToA عبارت t 0 زمان انتقال ناشناخته را توصیف میکند. در مورد ToF، عبارت t 0 حاوی هرگونه تاخیر الکتریکی و صوتی است.

اندازه گیری اختلاف زمانی با استفاده از یک ToA به عنوان مرجع به دست می آید. از آنجایی که اندازه گیری ها همبستگی ندارند، واریانس ها اضافه می شوند.

با فرض دمای همگن، فواصل، شبه فاصله ها و تفاوت فاصله را می توان با مقیاس بندی اندازه گیری های ToF، ToA یا TDoA بر اساس سرعت صوت محاسبه کرد. دما در این مورد با فرض یک جزء سیستماتیک و تصادفی مدلسازی میشود.
5.3. عدم قطعیت در کالیبراسیون
با استفاده از مدل پیشنهادی برای کالیبراسیون، که شامل اندازهگیریهای ToF (تصادفی و یک جزء سیستماتیک)، تاخیر صوتی مخروطها (جزء سیستماتیک)، یک مسیر مرجع با عدم قطعیت شناخته شده و دمای همگن در داخل اتاق (جزء سیستماتیک و تصادفی)، عدم قطعیت به دست آمده برای هر موقعیت فرستنده کالیبره شده عبارت است از:

T i مختصات فرستنده، u r عدم قطعیت مسیر مرجع و r طول مسیر مرجع است. همین امر در مورد گیرنده های R i نیز صدق می کند . تمام اجزای سیستماتیک یا تصادفی دیگر یا با الگوریتم ها یا میانگین گیری کاهش می یابد. موقعیت گیرنده مورد استفاده در کالیبراسیون موقعیت مرجع نامیده می شود. داشتن دو چنین موقعیت در دسترس و یک کمربند خطی به ما امکان می دهد موقعیت های مرجع دلخواه با عدم قطعیت شناخته شده ایجاد کنیم.
5.4. عدم قطعیت در بومی سازی
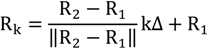
برای گزارش عدم قطعیت مکان، مفهوم F.2.4.5 از GUM [ 30 ] اعمال می شود. در این مورد، یک ضریب تصحیح شناخته شده b برای یک اثر سیستماتیک اعمال نمی شود، اما در عدم قطعیت اندازه گیری گزارش می شود. اندازه گیری ها بر اساس رابطه (14) به صورت مختصات سه بعدی (x، y، z) شامل یک اثر سیستماتیک با جهت نامعلوم و یک عدم قطعیت استاندارد ترکیبی نیز با جهت نامعلوم گزارش شده است. P مقدار (ناشناخته) اندازه گیری است. باید توجه داشت که معادله (14) قابل ارزیابی نیست، بلکه فقط یک روش رسمی برای گزارش نتایج است و باید همانطور که در اینجا توضیح داده شده است تفسیر شود.

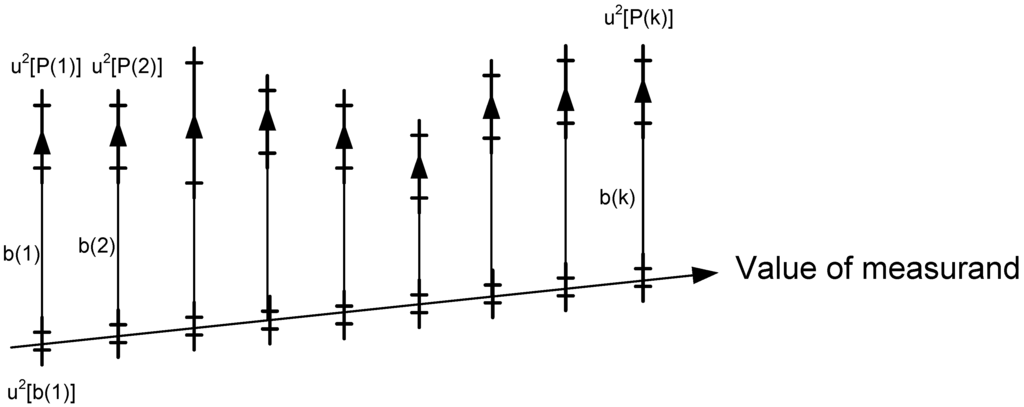
شکل 8. مثال گرافیکی برای محاسبه عدم قطعیت که مقدار مجهول را در پایین نشان می دهد، یک تفاوت سیستماتیک b(k) در هر موقعیت، عدم قطعیت در تعیین b(k) به عنوان فاصله u 2 [b(k)] در ردیابی خط. مقدار و عدم قطعیت اندازه گیری های فردی u 2 [P(k)].
عدم قطعیت استاندارد ترکیبی گزارش شده u c به عنوان جذر مثبت معادله (15) تعریف می شود. این عبارت پیچیده در شکل 8 توضیح داده شده است . شاخص k موقعیت روی کمربند را مشخص می کند (در مورد ما 23 موقعیت) در حالی که P(k) مجموعه اندازه گیری کافی را در این موقعیت تعریف می کند (20 در مورد ما).

اصطلاح u 2 [P(k)] صرفاً واریانس اندازهگیریهایی است که عمدتاً ناشی از عدم قطعیت اندازهگیریهای TDoA و DOP است. در هر موقعیت، یک ضریب اصلاح سیستماتیک b(k) را می توان تعیین کرد که میانگین فاصله اندازه گیری ها تا موقعیت مرجع درونیابی شده است. از آنجایی که مقدار مشخص نیست، عدم قطعیت برای تعیین این عامل با u 2 [b(k)] ناشی از موقعیتهای مرجع نادرست و واریانس مقدار میانگین اندازهگیریها بیان میشود. همانطور که فقط یک مقدار سیستماتیک منفرد b تعیین می شود u 2 [ b(k)] واریانس خود عامل را توصیف می کند. یکی از جنبه های مهم اعمال این فرمالیسم این است که نتایج را می توان به موقعیت های مختلف اتاق نیز منتقل کرد. به عنوان مثال u 2 (P(k)) که ارتباط نزدیکی با DOP دارد را می توان با محاسبه DOP و ارزیابی مجدد معادله (15) تخمین زد.
5.5. محاسبه پارامترهای عدم قطعیت
این بخش شامل یک مشتق ریاضی از اجزای عدم قطعیت فردی و ارزیابی آنها است. خوانندگانی که فقط به نتایج علاقه دارند می توانند از این بخش صرف نظر کنند. محاسبه دقیقاً از بخش F.2.4.5 GUM [ 30 ] پیروی می کند که در آن یک میانگین تصحیح b در F.7a محاسبه می شود. سپس عدم قطعیت در ارزیابی ضریب اصلاح سیستماتیک در F.7b و F.7c ارزیابی می شود. در F.7d میانگین واریانس ناشی از همه منابع عدم قطعیت غیر از b(k) تعیین می شود. در نهایت عدم قطعیت استاندارد ترکیبی در رابطه (15) را می توان با توجه به F.7e محاسبه کرد.
فرض کنید P(k)، 1 ≤ k ≤ M مجموعه ای از تخمین ها برای موقعیت های P(k) در موقعیت k باشد. بگذارید R 1 و R 2 دو نقطه مرجع باشند. سپس در صورتی که این دو نقطه توسط یک کمربند خطی به هم متصل شده باشند و موقعیتهای R1 و R2 بخشی از کالیبراسیون بوده باشند، میتوان در این بین نقاط مرجع دلخواه ایجاد کرد ( به دلایل دقت). یک نقطه مرجع درون یابی شده در موقعیت k با اندازه گام Δ به دست می آید
مجموعه P(k) شامل تمام اندازه گیری ها در موقعیت k است. فرض کنید P(k) مرکز ثقل این نقاط باشد

برآورد یک انحراف سیستماتیک b( k ) فاصله بین نقطه مرجع Rk و مرکز ثقل نقاط اندازه گیری است.

با توجه به F.7a b به عنوان محاسبه می شود
در این مورد منظور از b میانگین ضریب تصحیح سیستماتیک است. واریانس مربوط به b را می توان مشابه F.7b به عنوان محاسبه کرد
میانگین واریانس تصحیح b(k) عدم قطعیت کالیبراسیون و عدم قطعیت ارزیابی b(k) را شامل می شود. اجازه دهید u 1 و u 2 عدم قطعیت نقاط مرجع R 1 و R 2 باشد. با فرض یک درونیابی خطی ساده، عدم قطعیت برای نقطه R k به صورت داده شده است

مشابه F.7c، اکنون می توانیم میانگین واریانس ضریب تصحیح b(k) را محاسبه کنیم
استفاده از F.7d به ما امکان می دهد میانگین واریانس هر اندازه گیری را محاسبه کنیم. این واریانس ارتباط نزدیکی با DOP دارد زیرا فقط گسترش نقاط را در هر موقعیت تعریف می کند.

در نهایت مقدار واحد برای عدم قطعیت استاندارد ترکیبی است

نتایج به صورت گزارش شده است

گزارش نتایج مانند رابطه (14) ضروری است زیرا موقعیت ها کمیت های 3 بعدی هستند اما فاصله فقط یک عدد اسکالر است. یک بسط ممکن برای فرمالیسم اعمال شده در اینجا، تعریف همه معادلات در هر سه بعد است. مزیت چنین رویکردی این است که نتایج شامل اطلاعاتی در مورد جهت مولفه های خطا نیز می شود. برای اثر سیستماتیک، اگر اندازهگیریها برای مثال فقط به صورت موازی به مسیر مرجع منتقل شوند یا اثر پیچیدهتری اعمال شود، این اطلاعات را میدهد. برای مولفه تصادفی، این امکان تفسیری مشابه DOP افقی (HDOP) یا DOP عمودی (VDOP) را فراهم می کند. اشکال این است که مقایسه و تفسیر مقادیر چندگانه دشوارتر است.
5.6. جبران دما در طول عملیات
محلی سازی توسط TDoA انجام می شود و بنابراین معادله (12) اعمال می شود. مشاهده می شود که هیچ جزء خطای سیستماتیک به استثنای دما وجود ندارد. برای بهترین رویکرد، پیشنهاد میشود که حداقل روی گیرنده، که قبلاً در کالیبراسیون استفاده شده است، برای تمام طول عمر سیستم نگهداری شود. طراحی LOSNUS در واقع به نفع چنین رویکردی است زیرا افزودن گیرنده های بیشتر به هیچ وجه فرکانس اندازه گیری را کاهش نمی دهد. علاوه بر این، افزایش هزینه حداقل است.
اگر چنین گیرنده ای R وجود داشته باشد و سه اختلاف زمانی داشته باشیم، گیرنده را می توان با استفاده از یک معادله چند بعدی توسط فرستنده ها تعیین کرد. چنین عملکردی به چهار موقعیت فرستنده نیاز دارد که بدون از دست دادن کلیت به عنوان T 1 , T 2 , T 3 , T 4 , سه اختلاف زمانی t 12 , t 13 , t 14 و دمای T برای محاسبه سرعت صوت در نظر گرفته شده است.

فعلاً فرض کنید که هیچ جزء خطایی در اختلاف زمانی وجود ندارد. آنچه ما می دانیم این است که گیرنده هنوز باید در همان موقعیتی باشد که در حین کالیبراسیون به دست آمده است. اگر اینطور نیست، T باید اشتباه کند. بنابراین، دمای صحیح T دمایی است که به حداقل می رسد


5.7. تاثیر حرکت و اثر داپلر
اثر داپلر زمانی قابل توجه است که دستگاه فرستنده یا گیرنده در حرکت باشد. در LPS LOSNUS ، فقط گیرنده در حال حرکت است و فرستنده ها ثابت هستند. اگر صدای جیر جیر در فرکانس حامل f 0 متمرکز شود ، شیفت داپلر را می توان با [ 31 ] تقریب زد که جهت و سرعت حرکت گیرنده R است. جهت انتشار موج بین فرستنده و گیرنده توسط بردار وحدت داده می شود. .



اثر داپلر برای صدای چیپ مدوله شده با فرکانس خطی با تنظیمات شکل 3 با استفاده از یک فرمول تحلیلی از ([ 30 ]، ص. 210) و توسط یک شبیه سازی ارزیابی شده است. اثر روی پیک دامنه همبستگی قابل غفلت است و تغییر زمانی ناشی از اثر داپلر در شکل 9 نشان داده شده است .
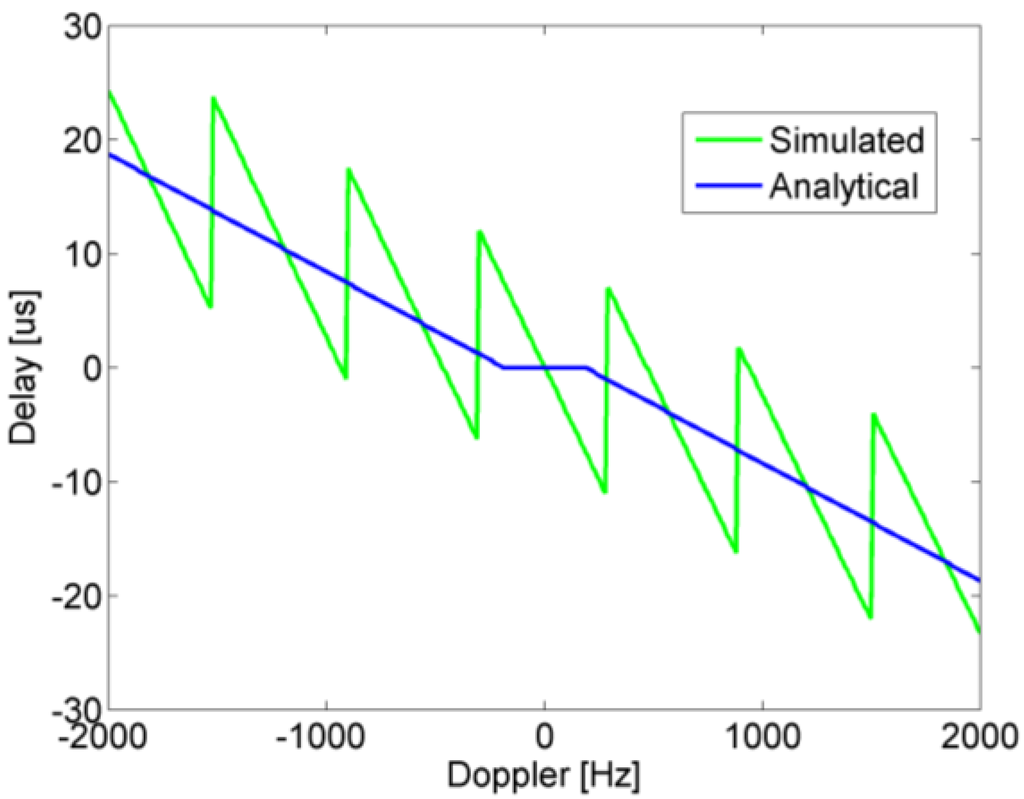
شکل 9. تاخیرهای زمانی ناشی از جابجایی داپلر برای عملکرد تحلیلی و شبیه سازی.
با استفاده از نتیجه شکل 9 ، می توان تأثیر جابجایی و حرکت داپلر را بر محلی سازی محاسبه کرد. اگر یک موج صوتی در زمان t = 0 ساطع شود و گیرنده در جهت حرکت کند ، حل معادله (31) ToF را تعیین می کند.

از آنجایی که گره در حال حرکت است و فواصل تا همه فرستنده ها معمولاً متفاوت است، منظور از مقدار موقعیت گیرنده باید تعریف شود. در این مقاله، موقعیت گیرنده به عنوان موقعیتی تعریف می شود که اولین سیگنال ارسال کننده در یک دنباله مکان یابی دریافت شده است. این تعریف به دلایل زیر انتخاب شده است: (الف) بدون اقدامات اضافی، گیرنده نمی داند در کدام جهت حرکت می کند. (ب) منطقی است که وقتی دنباله مکان یابی شروع می شود، موقعیت را با مهر زمانی علامت گذاری کنید. این موقعیت با R 0 نشان داده می شود . بنابراین، خطای یک موقعیت R را می توان طبق رابطه (32) تعریف کرد.
شکل 10 a,b خطاهای مکان یابی برای سرعت های مختلف گیرنده و فواصل بین قاب را نشان می دهد. مقادیر با شبیه سازی با استفاده از گیرنده های با فاصله یکنواخت در داخل اتاق محاسبه شده اند. برای هر گیرنده تمام شش جهت حرکت ممکن ارزیابی شده است. برای یک سرعت معین، مقدار منحنی نشان دهنده میانگین خطا در تمام موقعیت های گیرنده است که در آن نوار خطا نشان دهنده انحراف استاندارد است. به عنوان یک نتیجه کلی، سیستم در این پیکربندی تا سرعت های هدف 0.5 متر بر ثانیه که در آن اثر داپلر وجود دارد اما قابل توجه نیست، به خوبی کار می کند. افزایش فاصله بین قاب ها نتیجه را بدتر می کند، اگرچه در سرعت های گیرنده بالای 0.5 متر بر ثانیه، هر دو سیستم مشکلاتی را تجربه می کنند.
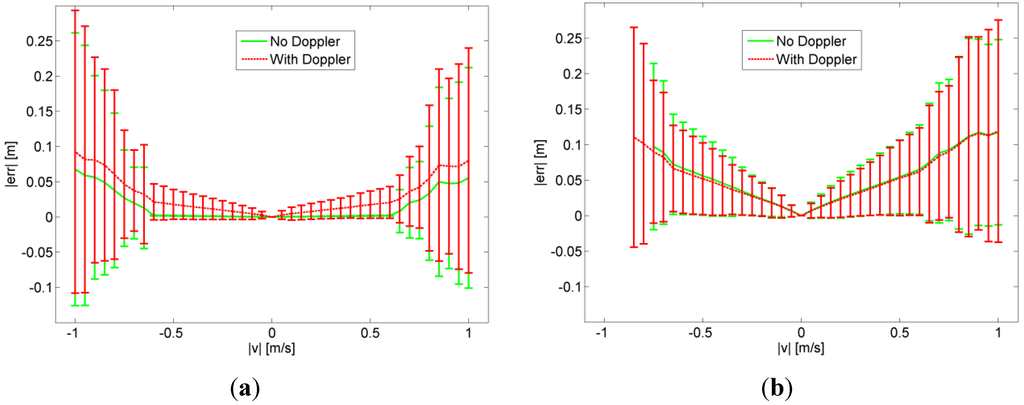
شکل 10. نتایج شبیه سازی: ( الف ) اثر حرکت گیرنده با فاصله رابط 0 ms (فقط در سیستم CDMA امکان پذیر است)، ( ب ) اثر حرکت گیرنده با فاصله بین قاب 10 میلی ثانیه مناسب برای LPS LOSNUS با حداقل فاصله حداکثر 3.4 متر بین پرتاب متوالی فرستنده ها
6. نتایج تجربی
6.1. پیکربندی سیستم
سیستم LPS LOSNUS در یک اتاق آزمایش 4 × 6 × 4 متر نصب شده است. اتاق از نزدیک یک اتاق اداری استاندارد شامل میز، صندلی و سایر ابزارها را دوباره جمع می کند. این سیستم می تواند یک خطای ToA را تحمل کند و شامل شش فرستنده و حداکثر هشت گیرنده است. فرستنده های مورد استفاده، مبدل های الکترواستاتیک سنسکام 600 با درجه محیطی با پهنای باند زیاد و اتصال صوتی خوب به هوا به دلیل امپدانس آکوستیک کم هستند. در سیستم تست، این فرستنده ها بر روی دیوار نصب می شوند و موقعیت آنها نسبت به سیستم مختصات در شکل 11 a مشخص شده است. همانطور که در شکل 11 نشان داده شده است می توان فرستنده ها را در دو جهت تنظیم کردب همه فرستندهها به یک واحد فعالسازی متصل میشوند که توسط یک رایانه شخصی با یک کارت NI-DAQ حاوی خروجیهای دیجیتال برای انتخاب فرستنده مربوطه و یک مولد شکل موج دلخواه (AWG) که در شکل 12 نشان داده شده است، کنترل میشود . تقویت کننده ولتاژ بالا (HV) خروجی AWG را تقویت می کند.

شکل 11. ( الف ) پیکربندی سیستم آزمایشی متشکل از شش فرستنده ایالات متحده. ( ب ) فرستنده اولتراسونیک قابل تنظیم در دو جهت از جمله سیم کشی.
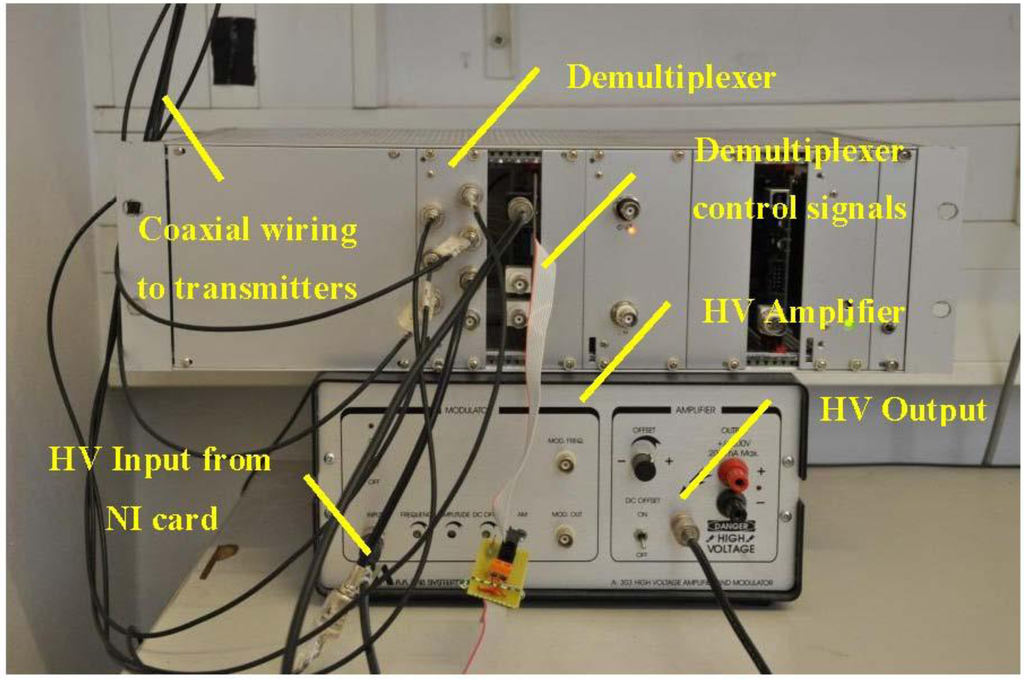
شکل 12. واحد فعال سازی متشکل از تقویت کننده ولتاژ بالا (HV)، دی مولتی پلکسر و کابل کشی.
گیرنده های کالیبراسیون و تأیید در طرف مقابل با فاصله تقریباً قرار گرفته اند. 3 تا 4 متر یک محور متحرک خطی به طول 1.5 متر که در ارتفاع تقریبی نصب شده است. 1 متر آزمایش با دستگاه های متحرک را امکان پذیر می کند و می تواند برای قضاوت در مورد کیفیت محلی سازی و کالیبراسیون استفاده شود. تنظیمات کمربند خطی شامل گیرنده در شکل 13 نشان داده شده است . خروجی های گیرنده ها نیز از طریق یک ماژول میکسر به کارت NI-DAQ متصل می شوند که می توان از آن برای افزایش تعداد کانال ها به هشت کانال استفاده کرد. برای استفاده عملی از LPS، گره های حسگر تعبیه شده کوچک و دستگاه های کم هزینه نیز توسط نویسندگان ساخته شده است. آنها عملکرد یکسانی را ارائه می دهند اما هدفشان کاهش هزینه ها و اندازه گره های حسگر است.

شکل 13. واحد گیرنده نصب شده بر روی تسمه متحرک.
6.2. تنظیم
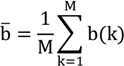
برای کالیبراسیون، از شش فرستنده و هفت گیرنده استفاده کردیم، اگرچه تنها به چهار فرستنده نیاز بود. موارد اضافی برای تأیید و بررسی متقابل استفاده می شود. علاوه بر این، یکی از هفت گیرنده بر روی یک کمربند خطی نصب شده است که در آن از دو موقعیت در طول فرآیند کالیبراسیون استفاده شده است. این موقعیت ها بعداً به عنوان موقعیت های مرجع استفاده خواهند شد، زیرا دارای عدم قطعیت شناخته شده هستند. در مجموع، اندازه گیری در هر موقعیت 48 مقدار ToF را ارائه می دهد. از آنجایی که اندازهگیریها از جمله حرکت تسمه به زمان نیاز دارند، فرض دمای ثابت دیگر درست نیست و باید از رویکرد جبران استفاده شود. با استفاده از الگوریتم جبران معادله (10) که در آن مجموع ToF ثابت نگه داشته می شود، منحنی جبران نشان داده شده در شکل 14a به دست می آید. یک مثال برای دو اندازه گیری ToF جبران شده در شکل 14 ب نشان داده شده است.
داده های میانگین پردازش شده پس از پردازش به عنوان ورودی برای الگوریتم کالیبراسیون استفاده می شود. ورودی دیگر حدس اولیه موقعیت فرستنده و گیرنده، سرعت صوت و تاخیر صوتی ناشی از مخروط ها است که برای پوشش وسیع مورد نیاز است. سپس خروجی نهایی الگوریتم کالیبراسیون به طول مسیر مرجع مقیاس می شود. نتایج کالیبراسیون سه بعدی در شکل 15 و جدول 1 نشان داده شده است. فرستنده ها با مختصات x/y/z خود مشخص می شوند، نمادهای سبز گیرنده هایی هستند که در فرآیند کالیبراسیون استفاده می شوند و نمادهای قرمز رنگ گیرنده های استفاده نشده در فرآیند محلی سازی قرار دارند. مسیر مرجع بین گیرنده ها به صورت خطی بین دو گیرنده نشان داده می شود. مقایسه نتیجه به صورت دستی با موقعیت فرستنده و گیرنده واقعی نتایج قابل اجرا را نشان می دهد. با این حال، قضاوت در مورد نتیجه کالیبراسیون با کیفیت کافی امکان پذیر نیست. استفاده از روش پیشنهادی، که شامل یک مسیر مرجع است، این کار را آسان می کند زیرا عدم قطعیت کالیبراسیون به خوبی تعریف شده است.
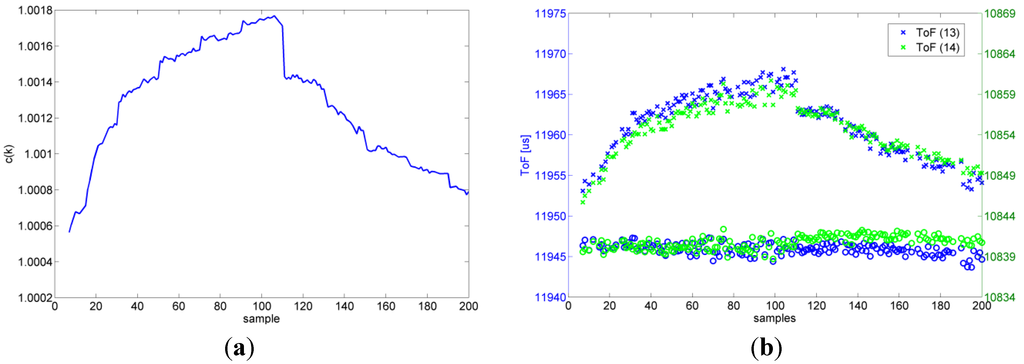
شکل 14. ( الف ) ضریب جبران c(k) که طبق رابطه (10) محاسبه می شود. ( ب ) مثالی از دو ToF جبران شده با فاکتور c(k). نقاط داده مشخص شده با “x” قبل از جبران و نقاط داده مشخص شده با “o” بعد از جبران هستند.

شکل 15. نتیجه کالیبراسیون (a = 1.012، مخروط تاخیر زمانی = 81.2 µs، c = 347.3 m/s).

جدول 1. موقعیت فرستنده کالیبره شده (بر حسب متر).
6.3. بومی سازی
در فاز عملیاتی LOSNUS ، موقعیت های فرستنده به دست آمده توسط فرآیند کالیبراسیون برای محلی سازی دستگاه توسط TDoA استفاده می شود. مکان یابی با شلیک متوالی فرستنده ها با پروتکل کاملاً تعریف شده آغاز می شود. برای هر فرستنده یک فریم از جمله فرکانس رمزگذاری فرستنده منحصر به فرد آن ارسال می شود. چنین سیگنالهایی سپس توسط گیرندههای اولتراسونیک دستگاهها دریافت میشوند و با همبستگی متقاطع باینری پردازش میشوند. نمونه ای از یک نتیجه همبستگی در شکل 16 نشان داده شده است . یک نتیجه همبستگی معمولی شامل چندین قله است. اولین پیک کدگذاری هر فرستنده LoS در نظر گرفته می شود که مقادیر صحیح ToA را می دهد. سپس این مقادیر ToA با استفاده از الگوریتم مکان یابی پیشنهادی ارزیابی می شوند.
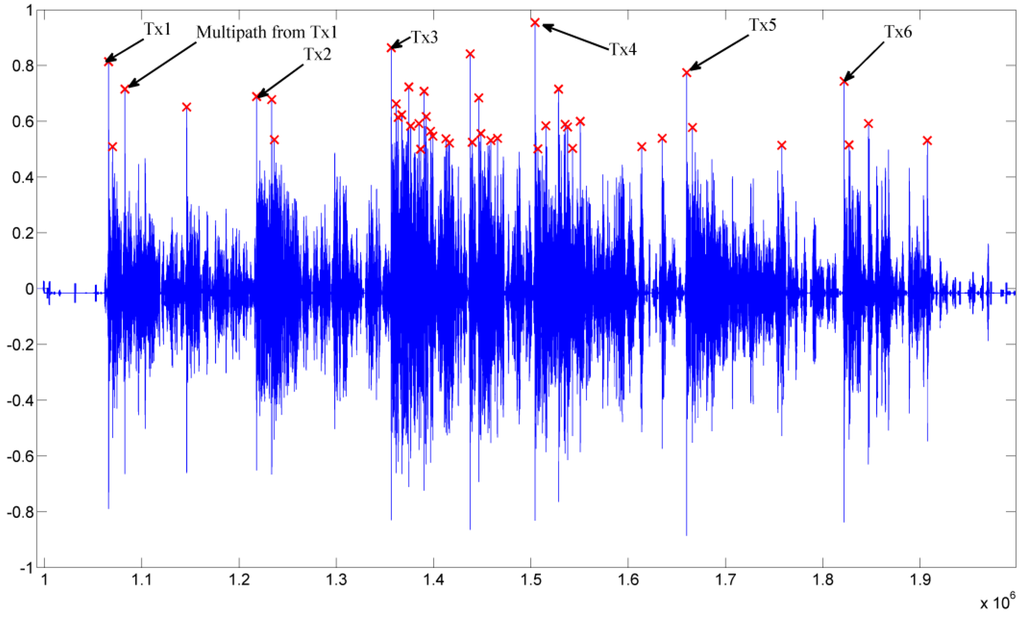
شکل 16. نتایج همبستگی یک توالی LOSNUS کامل که ToA را برای فرستنده های منفرد و مثالی برای سیگنال غیر خط دید (NLOS) برای Tx1 نشان می دهد.
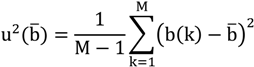
23 موقعیت روی تسمه با فاصله 50 میلی متر اندازه گیری شده است. در هر موقعیت، 20 اندازه گیری انجام شده است. موقعیت های شروع و پایان نیز موقعیت های مرجع مورد استفاده در کالیبراسیون هستند. در مرحله اول، دمای صحیح با استفاده از رابطه (29) با استفاده از این واقعیت که موقعیت مرجع نمی تواند حرکت کند، تخمین زده شده است. این در شکل 17 نشان داده شده است که در آن انحراف میانگین 20 اندازه گیری در نقطه مرجع برای مقادیر مختلف دما نشان داده شده است. دمای صحیح 24.8 درجه است که با دمای اندازه گیری دستی 24.9 درجه مطابقت دارد.
اندازه گیری ها در شکل 18 نشان داده شده است. دو علامت ستاره سبز موقعیت های مرجع از کالیبراسیون هستند. نمادهای به علاوه سیاه، موقعیت های مرجع درون یابی شده هستند که کمربند خطی را مدل می کنند. در هر موقعیت، گروهی از 20 اندازه گیری را می توان مشاهده کرد که در آن گسترش نتیجه DOP و عدم قطعیت اندازه گیری TDoA است. فاصله میانگین تا موقعیت های مرجع به دلیل عدم قطعیت دما و عدم قطعیت کالیبراسیون است. به هر حال، در جایی که عدم قطعیت استاندارد برای این اندازهگیری به صورت ||P − (x، y، z) T || گزارش میشود، نتیجه قابل توجه است. = 4.7 میلی متر ± 1.3 میلی متر. تجسم گرافیکی اجزای عدم قطعیت در شکل 19 نشان داده شده استآ. در این حالت b(k) محاسبه شده بر اساس رابطه (18) مؤلفه سیستماتیک عدم قطعیت، یعنی میانگین فاصله بین نقاط و موقعیت مرجع را نشان می دهد. مقدار انحراف معیار نقاط اندازه گیری شده در موقعیت k است. این مقدار با انحراف استاندارد اندازهگیریهای ToA و DOP برای ترکیب فرستنده/گیرنده مورد استفاده، ارتباط نزدیکی با DOP دارد. با توجه به مسیر مرجع بزرگ و دقیق مورد استفاده، کامپوننت نسبتا کوچک است.


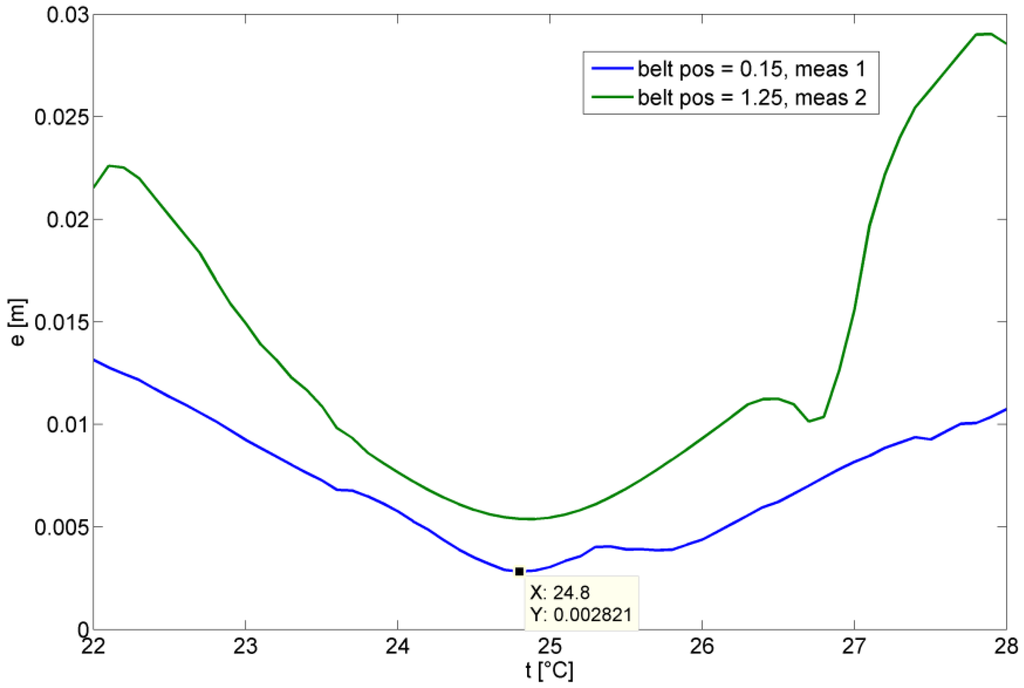
شکل 17. تعیین دما با استفاده از موقعیت های مرجع.
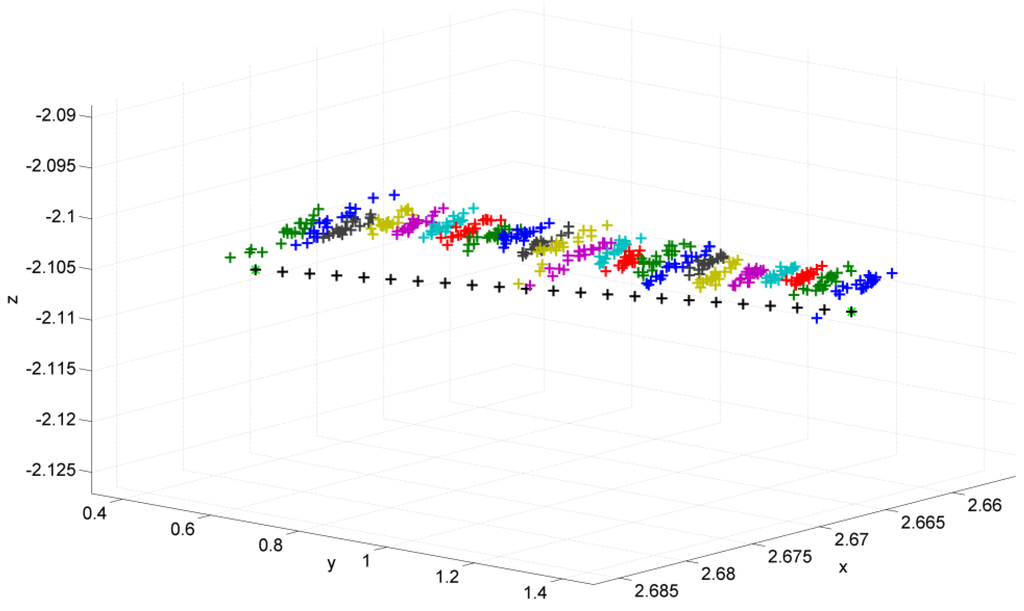
شکل 18. اندازه گیری بر روی کمربند خطی در 23 موقعیت با 20 اندازه گیری هر کدام. دما = 24.8 درجه سانتی گراد برگرفته از شکل 17 .
نکته جالب توجه این است که نتیجه نهایی حاوی هیچ چیز پرت نبود (هیچ پس پردازشی روی داده های ورودی انجام نشد). این نیز قابل توجه است زیرا در حدود 0.6 متر روی تسمه سیگنال فرستنده شش از بین می رود. این در شکل 19 ب نشان داده شده است.
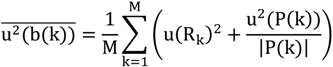
تکرارپذیری تحت شرایط محیطی مختلف نیز تأیید شد. باز هم شناسایی دما در شکل 20 ب و نتایج نشان داده شده در شکل 20 a خوب هستند. عدم قطعیت استاندارد گزارش شده ||P – (x، y، z) T || است = 6 میلی متر ± 2.2 میلی متر. انحرافات بین دو نتیجه، اگرچه اندک، به دلیل حجم نمونه محدود است. علاوه بر این، مدل سازی تمام اثرات ممکن را در نظر نمی گیرد.

شکل 19. ( الف ) میانگین خطا از نقاط مرجع. ( ب ) اندازه گروه ها در موقعیت های مختلف.

شکل 20. ( الف ) اندازه گیری مکرر در تاریخ و دماهای مختلف. ( ب ) دمای به دست آمده با استفاده از موقعیت مرجع 29.1 درجه سانتیگراد بود.
6.4. ملاحظات تحقق عملی
شکل 21 a یک گیرنده اولتراسونیک با استفاده از یک میکروکنترلر کم هزینه، یک میکروفون MEMS و یک کنترلر ZigBee برای ارتباطات داده را نشان می دهد. معماری نرم افزار پیشنهادی در شکل 21 ب نشان داده شده است. سیگنال ورودی تقویت شده و باند گذر فیلتر می شود. پردازش بیشتر فقط 1 بیتی انجام می شود. دو حالت عملیاتی امکان پذیر است. در حالت کم مصرف، گیرنده اولتراسونیک توسط استارت فریم موجود در LOSNUS فعال می شودتوالی. اگر ورودی ورودی دریافت شود، مقایسهکننده پایینتر رجیستر ضبط ورودی را فعال میکند که زمان جاری ساعت در حال اجرا آزاد را ذخیره میکند و شروع به کلاک کردن رجیستر شیفت میکند. اگر شرایط ورودی دیگری وجود نداشته باشد و طول کل فریم سپری شده باشد، ذخیره سازی یک فریم متوقف می شود. طول معمولی قاب شامل کدگذاری ورودی، چیپ و فرستنده در 1 MS کوچک است و به 740 بیت نیاز دارد. سپس این فریم ها را می توان به صورت آفلاین پردازش کرد.

شکل 21. ( الف ) تصویر اجرای آزمایشی یک گره حسگر با رابط ارتباطی ZigBee را نشان می دهد. ( ب ) معماری نرم افزار پیشنهادی برای پیاده سازی.
حالت کار دیگر زمانی است که شیفت رجیستر به طور دائم کلاک شده و همبستگی با چیپ همیشه انجام می شود. در این مورد نه قاب شروع و نه مقایسه کننده برای فعال کردن دریافت ضروری نیست. این حالت زمانی مفید است که مصرف انرژی مورد توجه نباشد و سیستم باید با SNR های بسیار پایین کار کند زیرا فشرده سازی پالس امکان تشخیص فریم هایی با SNR نزدیک به صفر را فراهم می کند.
7. نتیجه گیری
این مقاله LPS LOSNUS را ارائه میکند که برای دستگاههای مستقر متعدد، هزینه کم و دقت بالا با مفهوم یکپارچه کالیبراسیون و محلیسازی طراحی شده است. یک نیاز اساسی برای دقت بالا، کالیبراسیون دقیق است که با اندازه گیری های ToF با کیفیت بالا و فاصله مرجع شناخته شده تضمین می شود. نتایج محلی سازی با توجه به استحکام و دقت ارائه شده است. یک اندازه گیری کمی برای دقت با استفاده از دستورالعمل های توصیه شده توسط GUM [ 30 ] به دست می آید.]. این امکان ارزیابی فردی اجزای سیستماتیک و تصادفی و اعمال نتایج در پیکربندی های مختلف سیستم را فراهم می کند. استحکام با یک الگوریتم خوشهبندی جدید به دست میآید که تشخیص و حذف یک خطای غیر خط دید را ممکن میسازد. نتایج برای دو سناریو مختلف ارائه شده است که عدم قطعیت کمتر از 1 سانتی متر را در همه موارد نشان می دهد که نتیجه قابل توجهی است. کار مداوم بر چندین جنبه عملی سیستم متمرکز است، به عنوان مثال، تصحیح ساعت گیرنده و سایر روشهای کاهش خطا.
منابع
- میتیلینوس، اس. کیریازانوس، دی. Segou، E. محلی سازی داخلی با شبکه های حسگر بی سیم. Prog. الکترومغناطیس. Res. 2010 ، 109 ، 441-474. [ Google Scholar ] [ CrossRef ]
- شواینزر، اچ. سیستمهای کاستنر، دبلیو. در مجموعه مقالات پنجمین کنفرانس بین المللی سیستم های فیلدباس و کاربردهای آنها (IFAC)، آویرو، پرتغال، 7 تا 8 ژوئیه 2003.
- شواینزر، اچ. Syafrudin، M. LOSNUS: یک سیستم اولتراسونیک که مکان یابی دستگاه های متعدد را با دقت بالا و امن TDoA امکان پذیر می کند. در مجموعه مقالات کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی (IPIN)، زوریخ، سوئیس، 15-17 سپتامبر 2010.
- هارتر، ا. هاپر، ا. استگلز، پی. وارد، ا. وبستر، پی. آناتومی یک برنامه کاربردی آگاه از زمینه. در مجموعه مقالات پنجمین کنفرانس بین المللی ACM/IEEE در محاسبات و شبکه های موبایل (MobiCom)، سیاتل، WA، ایالات متحده آمریکا، 15 تا 19 اوت 1999.
- باوناخ، ام. کلا، ر. Mühlberger, C. SnoW Bat: یک سیستم مکان یابی مبتنی بر WSN با دقت بالا . گزارش فنی؛ دانشگاه وورزبورگ: وورزبورگ، آلمان، 2007. [ Google Scholar ]
- لازیک، پ. Rowe، A. شبه محدوده داخلی دستگاه های تلفن همراه با استفاده از صدای اولتراسونیک. در مجموعه مقالات دهمین کنفرانس ACM در مورد سیستم های حسگر شبکه جاسازی شده (SenSys)، تورنتو، ON، کانادا، 6 تا 9 نوامبر 2012.
- وودمن، او. هارل، RK برنامه ریزی همزمان در سیستم مکان یابی خفاش فعال. در مجموعه مقالات کنفرانس بین المللی IEEE در کارگاه های آموزشی فراگیر محاسبات و ارتباطات (PERCOM)، مانهایم، آلمان، 29 مارس تا 2 آوریل 2010.
- پریانتا، NB; چاکرابورتی، ا. بالاکریشنان، اچ. سیستم موقعیت مکانی-پشتیبانی کریکت. در مجموعه مقالات ششمین کنفرانس بین المللی محاسبات و شبکه های سیار (MobiCom)، بوستون، MA، ایالات متحده آمریکا، 6-11 اوت 2000.
- بالاکریشنان، اچ. بالیگا، ر. کرتیس، دی. گوراچکو، م. میو، ا. پریانتا، ن. اسمیت، ا. استیل، ک. تلر، اس. وانگ، ک. درس هایی از توسعه و استقرار سیستم مکان یابی داخلی کریکت. در دسترس آنلاین: http://cricket.csail.mit.edu/ (در 8 اوت 2003 قابل دسترسی است).
- کاساس، آر. مارکو، آ. گوئررو، جی. Falco, J. برآوردگر قوی برای کاهش خطای غیر خط دید در محلی سازی داخلی. EURASIP J. Adv. فرآیند سیگنال 2006 . [ Google Scholar ] [ CrossRef ]
- رویز، FD; اورنا، جی. جیمنز، جی. Villadangos, JM; گارسیا، جی جی. هرناندز، ا. Jimenez، A. پردازش داده ها برای کالیبراسیون یک سیستم موقعیت یابی محلی صوتی. در مجموعه مقالات کنفرانس IEEE Instrumentation and Measurement Technology (IMTC)، ویکتوریا، BC، کانادا، 12-15 مه 2008.
- کاساس، آر. کوارتیلز، دی. مارکو، آ. Gracia، HJ; Falco, J. مسائل پنهان در استقرار یک سیستم مکان یابی داخلی. محاسبات فراگیر IEEE 2007 ، 6 ، 62-69. [ Google Scholar ] [ CrossRef ]
- نواز، س. Trigoni، N. در محلی سازی قوی در محیط های بهم ریخته با انتشار NLOS. در مجموعه مقالات هفتمین کنفرانس بین المللی IEEE در سیستم های حسگر و Adhoc موبایل (MASS)، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 8 تا 12 نوامبر 2010.
- ماهاجان، ع. Figueroa, F. یک روش خودکار نصب و کالیبراسیون برای یک سیستم تشخیص موقعیت سه بعدی با استفاده از امواج فراصوت. ربات. Auton. سیستم 1999 ، 28 ، 281-294. [ Google Scholar ] [ CrossRef ]
- فوکوجو، ی. مینامی، م. موریکاوا، اچ. Aoyama, T. In DOLPHIN: یک سیستم موقعیت یابی مستقل داخلی در محیط محاسباتی همه جا حاضر. در مجموعه مقالات کارگاه IEEE در مورد فناوری های نرم افزاری برای سیستم های جاسازی شده آینده (WSTFES)، هاکودیت، هوکایدو، ژاپن، 15-16 مه 2003.
- نیشیتانی، ع. نیشیدا، ی. هوری، ت. Mizoguchi، H. سیستم برچسب سه بعدی اولتراسونیک قابل حمل بر اساس روش کالیبراسیون سریع، سیستم ها. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد انسان و سایبرنتیک، لاهه، هلند، 10-13 اکتبر 2004.
- داف، پی. مولر، اچ. الگوریتم کالیبراسیون خودکار برای سیستم های مکان یابی اولتراسونیک. در مجموعه مقالات هفتمین سمپوزیوم بین المللی IEEE در مورد رایانه های پوشیدنی (ISWC)، White Plains، نیویورک، ایالات متحده آمریکا، 21-23 اکتبر 2003.
- رانج، ا. باوناخ، ام. Kolla, R. خود کالیبراسیون دقیق سیستم های محلی سازی داخلی مبتنی بر اولتراسوند. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، گیماراس، پرتغال، 21 تا 23 سپتامبر 2011.
- اسپیتزر، جی. Schweinzer، H. LOSNUS: مکان یابی داخلی التراسونیک برای دستگاه های ثابت و متحرک متعدد. در مجموعه مقالات هفتمین کارگاه آموزشی جهت یابی موقعیت یابی و ارتباطات (WPNC)، درسدن، آلمان، 11 تا 12 مارس 2010.
- هیراتا، اس. کوروساوا، MK; Katagiri، T. دقت و وضوح اندازهگیری فاصله اولتراسونیک با تابع همبستگی متقاطع با وضوح بالا بهدستآمده از پردازش سیگنال تک بیتی. آکوست. علمی تکنولوژی 2009 ، 30 ، 429-438. [ Google Scholar ] [ CrossRef ]
- المر، اچ. شواینزر، H. وابستگی اندازه گیری اولتراسونیک همبستگی بر جهت گیری مبدل. در مجموعه مقالات IEEE Sensors، تورنتو، ON، کانادا، 22-24 اکتبر 2003.
- کلادر، جی. قیمت، A. دارلینگتون، اس. Albersheim, W. نظریه و طراحی رادارهای چیپ. زنگ. سیستم فنی J. 1960 , 39 , 745-808. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. عبدالله، دبلیو . مطالعه تطبیقی تکنیکهای تخمین تاخیر زمانی با استفاده از آرایههای میکروفون . دانشگاه اوکلند: اوکلند، نیوزلند، 2005. [ Google Scholar ]
- تمیم، ن. غنی، ف. تکنیک های بهینه سازی در برآورد تاخیر زمانی از تابع همبستگی متقاطع. بین المللی J. Eng. تکنولوژی 2010 ، 10 ، 49-54. [ Google Scholar ]
- والتر، سی. Schweinzer, H. یک سنسور سه بعدی التراسونیک فشرده و دقیق با استفاده از امواج پهن باند که نیازی به کالیبراسیون اولیه ندارد. در مجموعه مقالات کنفرانس فناوری ابزار دقیق و اندازه گیری (I2MTC)، گراتس، اتریش، 13-15 مه 2012.
- کتل ول، جی. Seguin، HJJ; Schwidt-Weinmar، HG دستگاهی برای شبیه سازی منبع نقطه ای در یک سیستم صوتی فرکانس بالا. IEEE Trans. سونیک سونیک. 1972 ، 19 ، 343-346. [ Google Scholar ] [ CrossRef ]
- بارد، جی دی. Harn، FM تفاوت زمان رقت رسیدن دقت و کاربردها. IEEE Trans. فرآیند سیگنال 1999 ، 47 ، 521-523. [ Google Scholar ] [ CrossRef ]
- سیافرودین، م. والتر، سی. Schweinzer, H. الگوریتمهای تخمین مکان برای LPS LOSNUS با دقت بالا. در مجموعه مقالات کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی (IPIN)، Montbeliard، فرانسه، 28-31 اکتبر 2013. در حال چاپ.
- استفان، پی. هک، من. کراوس، پی. فری، جی. ارزیابی فنآوریهای موقعیتیابی داخلی تحت شرایط کاربرد صنعتی در SmartFactoryKL بر اساس EN ISO 9283. در مجموعه مقالات سیزدهمین سمپوزیوم IFAC در مورد مشکلات کنترل اطلاعات در تولید، مسکو، روسیه، 3 تا 5 ژوئن 2009.
- کمیته مشترک راهنماها در اندازهشناسی، ارزیابی دادههای اندازهگیری – راهنمای بیان عدم قطعیت در اندازهگیری. 2008. در دسترس آنلاین: http://www.bipm.org/utils/common/documents/jcgm/JCGM_100_2008_E.pdf (در 8 اوت 2013 قابل دسترسی است).
- مهافزا، بی. الشربنی، ع. Mahafza, C. شبیه سازی متلب برای طراحی سیستم های راداری ; چاپمن و هال/CRC Press: Boca Raton، FL، USA، 2004. [ Google Scholar ]
© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution ( http://creativecommons.org/licenses/by/3.0/ ) توزیع شده است.
بدون نظر