1. مقدمه
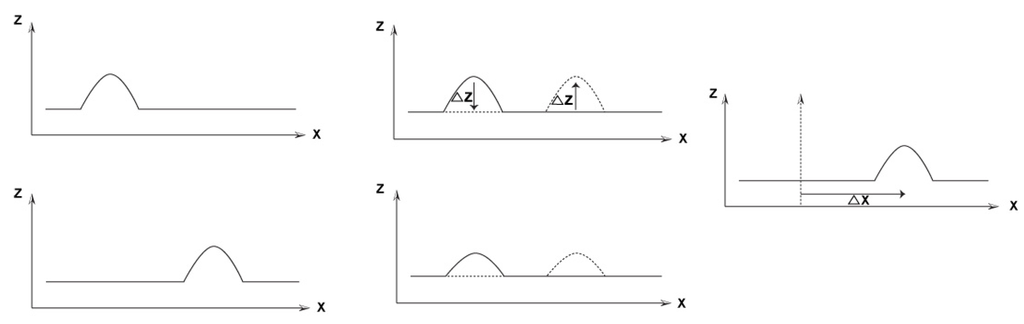
تجسم وابسته به زمان تغییرات در موجودیتهای فیزیکی، مانند مجموعه دادههای توپوگرافی که تغییرات مورفولوژیکی را ارائه میدهند، نیازمند مدلسازی متقابل مجموعهای از مجموعه دادههای گسسته است. فرض بر این است که این مجموعه دادههای توپوگرافی، مانند مدلهای زمین دیجیتال (DTMs)، در یک خط زمانی مشخص بهدست آمدهاند و تقریباً یک منطقه پوشش را نشان میدهند. مجموعه ای بی نهایت از مجموعه داده های توپوگرافی، که فاصله زمانی نزدیک به صفر را ارائه می دهد ( t → 0) عملا واقع بینانه نیست. واقعیت پدیده فیزیکی که در زمان اکتساب رخ می دهد همراه با ابهامات هندسی و ریخت شناسی موجود به مدل سازی پیچیدگی مجموعه داده های مشاهده شده می افزاید. این عوامل قطعاً به وجود سطوح مختلف روابط متقابل و ناسازگاری های هندسی در بین مجموعه داده های توپوگرافی کمک می کند. برای مثال، روش متحرک “صفحه تلنگر” که معمولاً مورد استفاده قرار می گیرد، که در آن هر مدل زمین به عنوان قاب کلید (یا مرحله کلید) عمل می کند، کافی نیست [ 1 ]. این عمدتا به دلیل این واقعیت است که مجموعه داده های توپوگرافی مختلف اشیاء غیر صلب هستند. بنابراین، آنها کاملا با یکدیگر متفاوت هستند، یعنی، ساختارها و ویژگی های هندسی مختلف را ذخیره می کند (تفاوت در سطح جزئیات و وضوح، ابهام داده ها، اختلافات کلی و محلی – به نام چند). هر شبیهسازی مستقیمی که ثبت و مدلسازی اولیه متقابل را نادیده میگیرد که این عوامل را در نظر میگیرد، به وضوح منجر به یک نمایش غیرواقعی و گاهی کوتاه، نادرست با “مصنوعات توپوگرافی” و شبیهسازی غیر هموار میشود. شکل 1چنین مثالی را به تصویر میکشد، که در آن دو مجموعه داده توپوگرافی یک موجودیت مورفولوژیکی یکسان را نشان میدهند (در این مورد یک تپه) – اما هر کدام موقعیت متفاوتی نسبت به یک سیستم مرجع دارند (سمت چپ). یک شبیهسازی مستقیم نتیجه نادرستی را ارائه میکند، که در آن یک موجودیت یکسان دو بار در طول انتقال ارائه میشود (وسط). انتقال صحیح باید در نظر گرفته شود که روابط فضایی (مثلاً ناسازگاری) بین این دو وجود دارد – در این مورد، جابجایی در محور x – قبل از انجام هر گونه شبیه سازی (راست)، بنابراین فقط یک موجودیت واحد را ارائه می دهد که در آن وجود دارد. واقعیت
شکل 1. دو مجموعه داده توپوگرافی که موجودیت مورفولوژیکی یکسانی را با موقعیت های مختلف ( بالا-چپ و پایین-چپ )، یک انتقال مستقیم به جلو ( وسط ) و انتقال دلخواه ( راست ) نشان می دهند.
بنابراین درک و مدل سازی روابط پیچیده ای که بین مجموعه داده های توپوگرافی وجود دارد ضروری است. این مقاله یک الگوریتم مدلسازی سلسله مراتبی جدید را معرفی میکند که یک مدلسازی متقابل کمی را از طریق مجموعهای از تناظرهای فضایی ایجاد میکند که به بهترین شکل تغییرات مورفولوژیکی رخ داده را توصیف میکند. بنابراین، ما را قادر می سازد تا وظایف شبیه سازی و تجسم انیمیشن را دقیق تر، واقعی تر و واقعی تر انجام دهیم. اینها برای یک گردش کار قابل اعتماد سیستم های اطلاعات جغرافیایی سه بعدی (GIS) ضروری هستند، در حالی که تلاش می شود تا انتقال واقعیت را به بهترین شکل توصیف و شبیه سازی کند.
هنگام در نظر گرفتن محیطهای کاری GIS جغرافیایی، نیاز اساسی این است که پشتیبانی از انواع مدلهای داده، به عنوان مثال ، نمایشها و ساختارها را ممکن میسازد، در حالی که در صورت نیاز، شبیهسازی در جریان نمایش اشیاء خاص را ممکن میسازد. چندین جنبه را می توان به عنوان الزامات اساسی ذکر کرد [ 2 ]، در حالی که سایر جنبه ها به صراحت هنگام برخورد با زمین و بازنمایی های چند زمانی مشتق می شوند:
-
پیچیدگی مدلسازی – واقعیت توپوگرافی که بر اساس اشیاء فیزیکی سه بعدی است، معمولاً بسیار پیچیده است: اطلاعات هندسی و معنایی – برای نام بردن از چند مورد.
-
وضوح چندگانه و بازنمایی چندگانه – وقتی با بازنمایی زمین چند دوره ای و چند منبعی سروکار داریم، اشیاء فیزیکی که زمین را نشان می دهند به ندرت از یک ماهیت برخوردارند.
-
ارائه و ظاهر-معمولاً هنگام نمایش داده های سه بعدی زمین، بیننده می خواهد که نمایش تا حد امکان واقعی باشد و از نمادهای داده و حاشیه نویسی مشتق نشده باشد.
-
انیمیشن – انیمیشن زمین باید کیفیت و دقت داده های داده شده را حفظ کند و همچنین در طول شبیه سازی واقع گرایانه و پیوسته باشد.
-
شبیهسازیها و نمایشهای چندزمانی – الگوریتم انتخابی به جای تلقی هر ناحیه از آناتومی بهعنوان یک مورد خاص، باید مشکل کلی تغییر شکل ناشی از اشیاء فیزیکی (یا اسکلتها) را مدیریت کند.
-
توپولوژی ها و مورفولوژی ها – در صورتی که از فرآیند تغییر شکل مشتق شده باشند، باید حفظ یا ایجاد شوند، در حالی که ماهیت واقعی بازنمایی حفظ می شود.
تکنیکها و روشهایی که شامل تبدیل یک شی به شی دیگر (به عنوان مثال، موجودات توپوگرافی) میشوند، در حالی که یک انتقال پیوسته از دنبالههای شکل را ایجاد میکنند که به تدریج تغییر میکنند، در دهههای اخیر در بسیاری از جنبهها در زمینه گرافیک کامپیوتری توسعه یافتهاند (مثلاً ، [ 3 ، 4]). این تکنیکها که بیشتر در اصطلاح شکلگیری شکل و ترکیب شکل شناخته میشوند، سعی در ایجاد یک جلوه بصری طبیعی دارند و بیشتر برای کارهای مختلف انیمیشن در تلویزیون و فیلم استفاده میشوند. فرآیند تبدیل معمولاً (بصری) با هندسه اشیاء مبدا و مقصد بیان می شود. چالش اصلی ایجاد الگوریتم هایی است که قادر به تطبیق فضایی اشیاء متفاوت از یکدیگر باشند. این باید با حداقل مداخله کاربر به دست آید، در حالی که خصوصیات اشیاء را تا حداکثر ممکن حفظ کند [ 5]. پس بدیهی است که دستیابی به این چالش و معیارهای ذکر شده در بالا در هنگام پرداختن به پیچیدگی های نمایش های توپوگرافی مورد نیاز برای برنامه های GIS واقعی (واقعیت مجازی) و نقشه برداری، مانند شبیه سازی تغییرات مورفولوژیکی، تشدید می شود.
3. رویکرد پیشنهادی
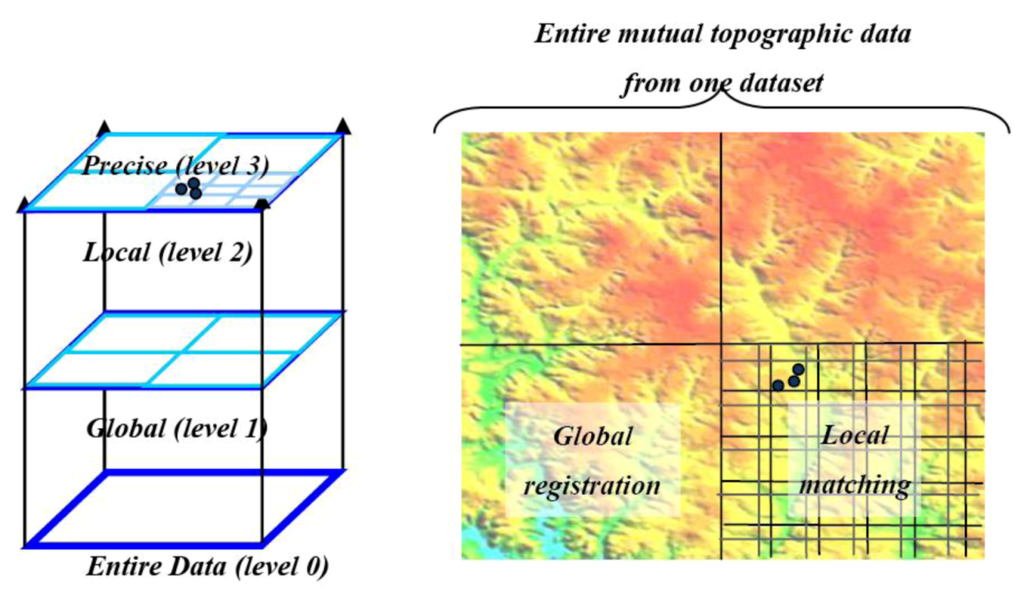
مدلسازی سلسله مراتبی طراحی شده برای ادغام دو (یا چند) DTM همگن در کار [ 16 ] پیشنهاد شد. این مکانیسم از مجموعههای کامل و دقیقی از روابط دادهها و مکاتبات در مقیاسهای مختلف که در دو DTM وجود دارد که یک منطقه پوشش متقابل مشترک دارند، بهرهبرداری میکند. تقسیم مجموعه دادههای توپوگرافی به چندین سطح منطقه سلسله مراتبی همگن مجزا، که در شکل 3 نشان داده شده است، ما را قادر میسازد تا روابط فضایی موضعی صحیح را به درستی تعریف کنیم، به گونهای که اختلافات هندسی کلی و محلی قبل از انجام فرآیند ادغام واقعی، نظارت و مدلسازی میشوند. این مکانیسم باعث ایجاد مدلی می شود که پارامتر تبدیل محلی را بین مجموعه داده های توپوگرافی ذخیره می کند .، مطابقت های فضایی کامل از طریق پارامترهای ترجمه و چرخش بیان می شود. استفاده از این روابط داده ها، مدل سازی دقیق DTM ها را امکان پذیر می کند، یعنی استخراج یک چارچوب کاری مرجع متقابل (شما) برای یکپارچه سازی داده ها.
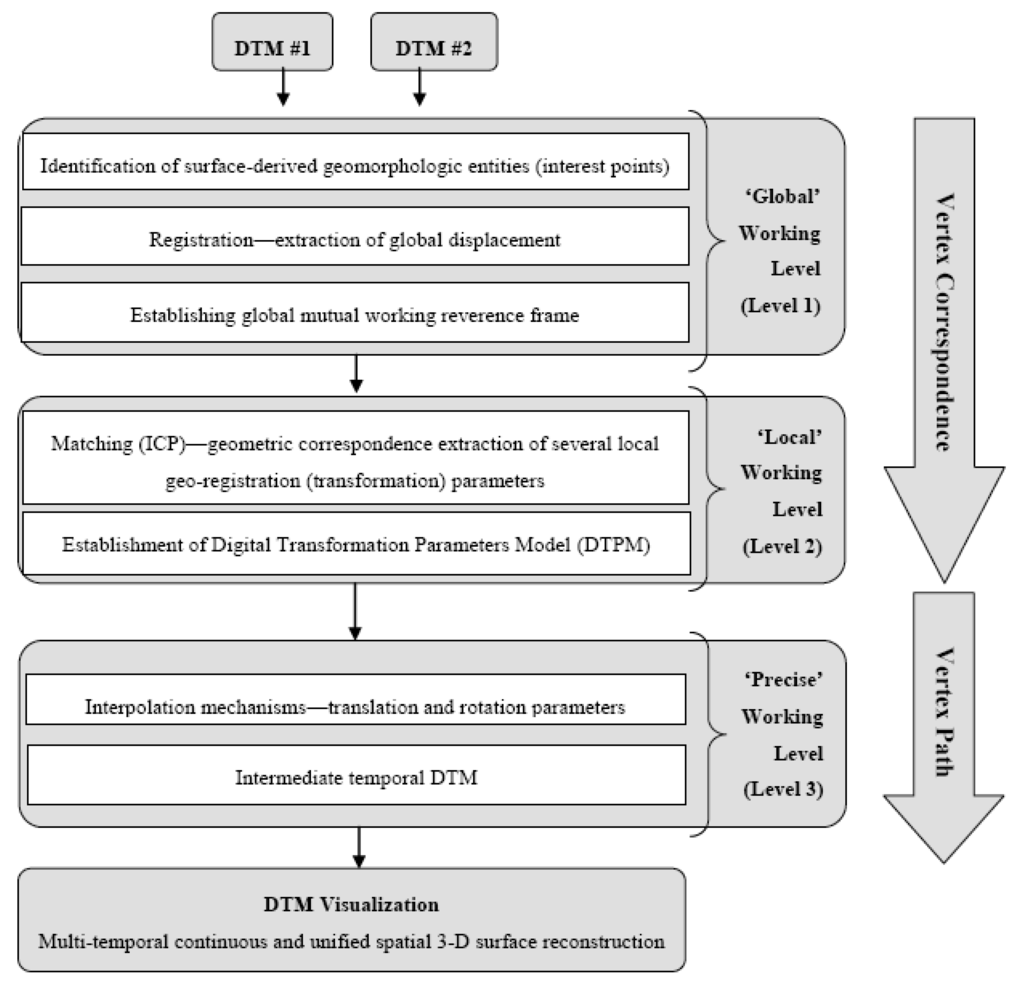
شکل 3. طرح مدلسازی سلسله مراتبی، که سه سطح کاری را به تصویر میکشد: جهانی (ثبتنام، سطح 1)، محلی (تطبیق، سطح 2) و ادغام و درونیابی دادههای مشتق از موقعیت دقیق (سطح 3).
شکل 4. گردش کار مکانیسم مدل سازی سلسله مراتبی و مراحل اصلی آن. DTM، مدل های دیجیتالی زمین.
بررسی کوتاهی از این مکانیسم و مراحل اصلی آن در جریان کار در شکل 4 نشان داده شده است. به طور کلی، مراحل 1 و 2 برای استخراج مطابقت راس محلی و دقیق طراحی شده اند، در حالی که مرحله 3 برای مسیر راس طراحی شده است:
-
ثبت جهانی تقریبی، در حالی که انتخاب یک چارچوب مشترک برای هر دو DTM (و بنابراین، حل ابهامات سیستم مبنا و مختصات موجود بین DTMها قبل از انجام تبدیل، همانطور که در شکل 1 نشان داده شده است). این در حالی به دست می آید که الگوریتم فاصله Hausdorff را اجرا می کند که مجموعه ای از موجودیت های همولوگ منحصر به فرد (اشیاء) انتخابی موجود در ساختار اسکلت هر دو توپوگرافی را ثبت می کند. ساختار اسکلت هر DTM از طریق یک الگوریتم جدید شناسایی نقطه بهره حداکثر توپوگرافی شناسایی می شود.
-
تطبیق – از آنجایی که ثبت جهانی به دست می آید و ابهامات داده برطرف می شوند، تطبیق محلی در حین اجرای الگوریتم نزدیکترین نقطه تکراری (ICP) برای تطبیق سطوح صلب انجام می شود. این مرحله برای دستیابی به چارچوب مدلسازی متقابل دقیق بین دو مجموعه داده ضروری است، بنابراین تعیین کمیت تبدیل موضعی را ایجاد میکند.
-
طرح ادغام، که متشکل از مدل سازی کمی روابط درونی ارزیابی شده در تطبیق محلی است. از آنجایی که تبدیل از طریق ICP در سطح محلی استخراج میشود، این کمیسازی برای همه نقاط موجود در آن سطح متراکمسازی میشود، به عنوان مثال ، استخراج مقادیر تبدیل برای هر نقطه DTM به طور مستقل تا از یک مجموعه داده توپوگرافی به دیگری تبدیل شود. این متراکمسازی از طریق مکانیسمهای درونیابی تعیینشده انجام میشود، که بیشتر برای تطابق با کار در دست توسعه یافتهاند (مورد بحث در بخش 4.2 ).
3.2. ارزیابی مسیر
به طور فرضی، هنگام تبدیل یک نقطه شبکه DTM از مجموعه داده توپوگرافی منبع، در حالی که از پارامترهای تبدیل ذخیره شده استفاده می شود، باید با زمین ارائه شده توسط مجموعه داده توپوگرافی هدف منطبق باشد. مسیر (راس) از مبدأ به مقصد در واقع یک تبدیل فرضی بین دو شیء فیزیکی است که میتواند وابسته به زمان در نظر گرفته شود و هر صحنه میانی در آن مسیر اساساً تجسم زمین زمانی منحصر به فرد است.
با این حال، وضوح ماتریس DTPM به طور قابل توجهی کمتر از وضوح (های) داده شده مجموعه داده های توپوگرافی مدل شده است. معمولاً مجموعه دادههای توپوگرافی از نقاط شبکه در وضوح چند متر تا چند ده استفاده میکردند. وضوح DTPM، با این حال، از اندازه فریم استفاده شده در فرآیند تطبیق ICP مشتق شده است. بنابراین، ذخیره پارامترها در وضوح چند صد متر (به عنوان مثال، 1 کیلومتر مربع ) . این واقعیت که مقادیر تبدیل منحصر به فرد مشتق شده از موقعیت برای هر نقطه ای که در یک مجموعه داده توپوگرافی (منبع) وجود دارد برای تبدیل به مجموعه داده توپوگرافی دیگر (هدف)، یعنی مسیر راس، مورد نیاز است، نشان می دهد که درون یابی روی این مقادیر لازم است. با توجه به ساختار ماتریس سلول گسسته، حرکت بین سلول های همسایه،به عنوان مثال ، بین مجموعه های مختلف از شش پارامتر تبدیل، ممکن است تغییرات مقدار را ایجاد کند. در نتیجه، عدم اجرای هیچ درون یابی بر روی این مقادیر ممکن است ناپیوستگی هایی در توپوگرافی میانی تولید شده ایجاد کند – ناپیوستگی هایی که با خطوط مرزی سلول DTPM منطبق خواهند شد.
دو روش درون یابی را می توان اشاره کرد:
-
در میان گره های گرید ماتریس DTPM ( فضا دامنه ) برای حفظ پیوستگی، در حالی که در میان سلول ها حرکت می کنند. این محاسبات برای محاسبه شش مقدار تبدیل پارامترهای مشتق از موقعیت تعیین شده است. این مقادیر برای تبدیل یک نقطه شبکه که در مجموعه داده منبع وجود دارد به موقعیت متناظر آن در مجموعه داده هدف مورد نیاز است.
-
بین مجموعه داده های توپوگرافیک/DTM ها ( دامنه زمان ). از نظر فضایی، می توان آن را به گونه ای ترسیم کرد که گویی توپوگرافی میانی در فضای بین توپوگرافی منبع و هدف قرار دارد. موقعیت مجموعه داده توپوگرافی میانی با نسبت زمانی و بزرگی دگرگونی های درگیر در فرآیند تعریف می شود.
در نتیجه، پس از اجرای درون یابی “در میان”، یک درون یابی “در بین” بر روی مقادیر انجام می شود تا موقعیت زمین میانی در آن فضا از نظر فضایی ارزیابی شود. درون یابی “در بین” (یا مسیر) برای محاسبه مقادیر تغییر وزن شش پارامتر از توپوگرافی منبع ( زمان = 0) به هدف یک ( زمان = 1)، در حالی که زمان ∈ [0,1] طراحی شده است. هر مقدار تبدیل به تدریج از صفر در توپوگرافی منبع تا حداکثر مقدار آن در یک هدف (که از طریق فرآیند ICP محاسبه شد) تغییر می کند. با توجه به خصوصیات مختلف دادههای پارامترهای ترجمه و چرخش، روشهای درونیابی پیشنهادی تقسیم میشوند.
بخش بعدی الگوریتم ها و مفاهیم محاسباتی طراحی شده برای تجسم چند زمانی را که پیاده سازی و ادغام شده اند ارائه می کند. بخش 4.1 استخراج تناظر راس از طریق فرآیند ثبت سلسله مراتبی را تشریح می کند. این شامل توضیح ملاحظات الگوریتمی و مفاهیم ریاضی مورد نیاز است. بخش 4.2 مشکل مسیر راس را که از طریق مکانیسم های درون یابی خاص درگیر می شود، تشریح می کند.
4. طرح کلی الگوریتم
4.1. تطبیق محلی (تطابق رأس)
4.1.1. عمومی
کل منطقه مدل شده به قاب ها تقسیم می شود. هر قاب همخوان – یکی از هر نمایش زمین – از طریق الگوریتم ICP به طور مستقل و جداگانه مطابقت داده می شود. این پیادهسازی محلی در نظارت و مدلسازی ناسازگاریهای تصادفی محلی مؤثرتر است و روندها وجود دارد. بنابراین، تخمین دگرگونی(های) بدنه صلب که هر دو مدل را به بهترین شکل تراز می کند، به دست می آید. این کمی سازی بعداً برای تبدیل – و تغییر شکل – یک شی به شی دیگر استفاده می شود.
تطبیق ICP از طریق به حداقل رساندن یک تابع هدف بر اساس تطبیق حداقل مربعات (LSM) انجام می شود. این فرآیند مجموع مجذور فاصلهها یا خطاهای اقلیدسی فضایی را اندازهگیری میکند که بین هندسههای ارائهشده توسط قابهای متجانس وجود دارد: g و f . خروجی فرآیند استخراج مکاتبات بیان شده از طریق مدل تبدیل فضایی موجود بین فریم ها را امکان پذیر می کند.
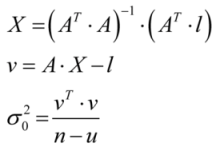
به منظور انجام برآورد حداقل مربعات، یعنی خطی سازی، فقط عبارت های خطی حفظ می شوند (ترتیب های دوم و بالاتر از سری تیلور حذف می شوند). در نتیجه، هر فرمول مشاهده به ترکیبی خطی از پارامترهای تبدیل مربوط میشود که اساساً متغیرهای یک مجهول قطعی هستند [ 17 ]. مدل تبدیل جسم صلب سه بعدی مورد استفاده در اینجا از شش پارامتر تشکیل شده است: سه ترجمه { t x ، t y ، t z } و سه چرخش { ω ، φ ، κ }. مدل LSM به صورت نماد ماتریسی در معادله (1) نوشته شده است:
که در آن A ماتریس طراحی است (مشتقات شش پارامتر مجهول)، X بردار 6 پارامتری مجهول { t x ، t y ، t z ، ω ، φ ، κ } T و l بردار اختلاف است که اقلیدسی است. فاصله بین قابهای DTM مربوطه (معمولاً DTMها واقعیت را در مقیاس واقعی نشان میدهند؛ بنابراین، در اینجا فرض میشود که هر دو مجموعه داده، تسکین زمین را با ضریب مقیاس تقریباً یکسان ( m ) نشان میدهند، یعنی روی وحدت ثابت است.
راه حل حداقل مربعات به عنوان مدل تعمیم یافته گاوس-مارکف، تخمین حداقل واریانس بی طرفانه را برای پارامترها تولید می کند، که در رابطه (2) نشان داده شده است:
که در آن X نشان دهنده بردار راه حل، v نشان دهنده بردار باقیمانده مشاهدات قاب، σ 0 2 نشان دهنده ضریب واریانس، n نشان دهنده تعداد مشاهدات و u نشان دهنده تعداد پارامترهای تبدیل (ناشناخته) است، یعنی u = 6.
4.1.2. محدودیت های بدنه غیر صلب
با توجه به این واقعیت که هر دو DTM جسم فیزیکی غیر صلب هستند، چندین جنبه در نظر گرفته می شود:
-
DTMهای با پوشش گسترده، ویژگیهای داده متفاوتی را نشان میدهند – یعنی سطح جزئیات و وضوح – که به این معنی است که نقاط همولوگ ICP موجود اصلاً صریح نیستند.
-
DTMهای به دست آمده در زمان های مختلف (دوران) مطمئناً توپوگرافی و مورفولوژی زمین (فعالیت های طبیعی یا مصنوعی) متفاوتی را نشان می دهند.
-
داده ها و خطاهای اندازه گیری می توانند بر قطعیت موقعیت نقاط در مقیاس نسبتاً بزرگ منعکس شوند.
پرداختن به موارد فوق الذکر سه محدودیت هندسی نقطه به سلول به دست می دهد که در فرآیند ICP پیاده سازی می شوند:
-
مختصات متناظر نزدیکترین همسایه جفت شده i { f ( x , y , z ) i } از نظر هندسی با صفحه سلولی محلی در قاب f مطابقت دارد. هندسه صفحه سلول در اینجا با درون یابی دو خطی موضعی تعریف می شود: z ( x , y ) = a 0 + a × x + a 2 × y + a 3 × x y y که احتمالاً رایج ترین روش محاسبه است . ارتفاعات در یک سلول شبکه مستطیلی محدود. چهار ضریب {a 0 , a 1 , a 2 , a 3 } بر اساس ارتفاع گوشه سلول محاسبه می شود که در رابطه (3) و شکل 6 نشان داده شده است (در مواردی که از ساختار شبکه نامنظم مثلثی (TIN) مجموعه داده های توپوگرافی استفاده می شود، تغییرات جزئی انجام می شود. از این معادلات برای تناسب با ویژگیهای صفحه مثلثی TIN مورد نیاز است. با این حال، اگرچه امروزه این ساختار داده معمولاً بیشتر برای دادههای بهدستآمده از فناوری اسکن لیزری هوابرد (ALS) استفاده میشود، اکثر DTMهای پوشش گسترده موجود هنوز هم هستند. به عنوان یک ساختار شطرنجی ذخیره و تحلیل می شود؛ بنابراین، در اینجا به این موضوع پرداخته نخواهد شد).
-
معادله خط، مشتق شده از مختصات نقطه i ، از قاب g (که با g t ( x ، y ، z ) مشخص می شود ، که t مخفف تبدیل شده است) به قاب f با بهترین پارامترهای تبدیل شناخته شده و جفت تبدیل شده است. نزدیکترین همسایه، i ، در قاب، f { f ( x ، y ، z ) i }، عمود بر صفحه سلولی محلی در قاب، f ، در X است.جهت (به دست آمده توسط مشتق مرتبه اول). این محدودیت تأیید میکند که نقاط همتا، g t ( x , y , z ) i و f ( x , y , z ) i ، نزدیکترین نقاط موجود بر اساس کوتاهترین فاصله اقلیدسی هستند.
-
همان محدودیت مشخص شده در 2 اعمال می شود، فقط در اینجا، معادله خط عمود بر صفحه سلولی محلی در قاب f در جهت Y است:
که در آن Z i { i ∈ [0-3]} نشان دهنده ارتفاع گوشه سلول شبکه DTM محلی است، که در شکل 6 نشان داده شده است، و D نشان دهنده وضوح DTM است (اگر مقادیر وضوح متفاوتی در هر دو محور/جهت DTM وجود داشته باشد، تغییرات جزئی لازم است. ).
شکل 6. نمایه سازی شماتیک ارتفاع گوشه سلول شبکه ای محلی DTM: Z i { i ∈ [0-3]}.
نقطه تبدیل شده از g با بهترین پارامترهای تبدیل موجود (تکرار به روز شده) با g t ( x , y , z ) i تعریف می شود ، در حالی که نقطه مقابلی که در واقع سلول صفحه محلی را حفظ می کند با f ( x , y , z ) تعریف می شود. ) من _ f ( x , y , z ) i , که نزدیکترین نقطه ای است که به g t ( x , y , z ) وجود دارد) i ، باید سه محدودیت را که قبلاً توضیح داده شد تأیید کند.
اولین محدودیت برای نقطه f ( x , y , z ) i با معادله (4) تعریف می شود:
قیود دوم و سوم با الزام مشتق مرتبه اول صفحه و خطی که دو نقطه را به هم وصل میکند (معادله (5)) نزدیکترین نقطه را اعمال میکنند، یعنی ضرب برابر است با مقدار منهای یک (-1) نشان داده شده است. در معادله (6). توضیح شماتیک فرآیند محدودیت در شکل 5 نشان داده شده است ، جایی که Z i { i ∈ [0-3]} چهار گوشه سلول شبکه حاوی نزدیکترین نقطه را نشان می دهد.
بنابراین، دو قید آخر را می توان به صورت معادله (7) نوشت:
می توان آن را به گونه ای توصیف کرد که اگر این معیارهای قیود بردار را بین نقاط g t ( x , y , z ) i ( خاکستری تیره ) و f ( x , y , z ) i (سیاه) روی شبکه محلی جابجا می کند. صفحه سلول به سمت موقعیت نهایی خود، بنابراین حداقل مربعات تابع هدف را تا زمان همگرایی به موقعیت نهایی f ( x ، y ، z ) i ، که در شکل 7 نشان داده شده است، به حداقل می رساند .
شکل 7. توضیح شماتیک کمینه سازی تابع هدف حداقل مربعات از طریق سه قید: g t ( x , y , z ) i نقطه تبدیل شده را از g و f ( x , y , z ) i نشان دهنده نقطه همتای نگهدارنده شبکه صفحه محلی است. -سلولی که نزدیکترین به g t ( x , y , z ) i است.
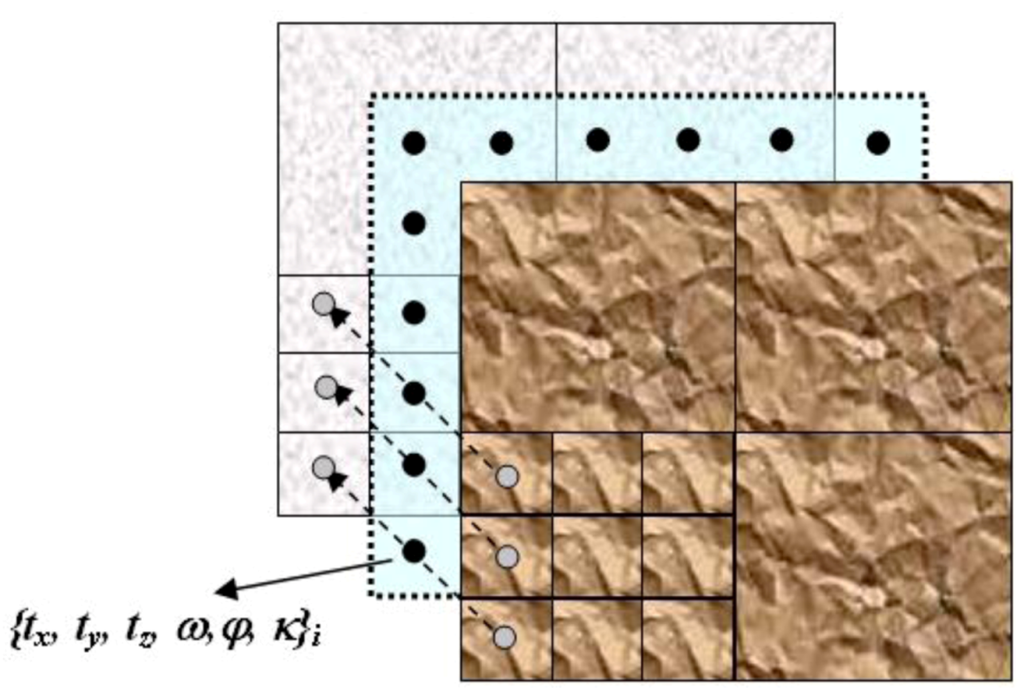
جمع کردن تمام ( x ، y ، z ) مقادیر نقاط از g و نقاط همتای f در یک قاب خاص، کمیت تبدیل یکپارچه را که با شش پارامتر بیان می شود، به دست می دهد (از طریق فرآیند ICP). اینها در DTPM ذخیره می شوند که قبلا در شکل 5 نشان داده شده است. در نتیجه، نتیجه اجرای این فرآیند، تعیین کمیت دقیق تمام تناظرهای فریم بین مجموعه داده های توپوگرافی مختلف است. با این حال، یک کمی سازی دقیق محلی تر در هر نقطه شبکه و همچنین ارزیابی مسیر رأس واقعی مورد نیاز است – که هر دو در بخش بعدی توضیح داده شده اند.
4.2. پارامترسازی تناظر فضایی (مسیر رأس)
4.2.1. ارزش های ترجمه
با توجه به ساختار داده DTPM – مدل شبیه به DTM – یک درونیابی که نمایش مداوم پارامتر را تضمین می کند باید انتخاب شود. درونیابی ارتفاعات DTM با استفاده از معادلات سهموی درجه سوم دو جهته در [ 18 ] توضیح داده شده است. این الگوریتم یک الگوریتم مبتنی بر ناحیه است که درون یابی صاف را در سلول شبکه تضمین می کند، و همچنین ناپیوستگی های نمایش سطح در مرزهای سلول را در حین حرکت به سلول های همسایه حذف می کند. این الگوریتم یک نسخه بهبود یافته از درون یابی مبتنی بر ناحیه دو خطی ساده است که ممکن است نمایش سطحی ناهموار و غیرصاف را ایجاد کند.
این الگوریتم برای درون یابی ارتفاع طراحی شده است. به طور مشابه، می توان آن را تغییر داد تا سه مقدار ترجمه مشخصه خطی ذخیره شده در ماتریس تبدیل در سه فرآیند جداگانه را مدیریت کند. معادله (8) معادلات الگوریتم مورد استفاده برای این درونیابی را نشان می دهد. پیادهسازی این فرآیند ما را قادر میسازد تا برای هر نقطه شبکه از مجموعه داده منبع، سه پارامتر تبدیل ترجمه را دقیقاً تعریف کنیم و از این رو، یک “سطح ترجمه” دقیقتر و صافتر را دریافت کنیم که به اندازه کافی با این مقادیر ترجمه مطابقت دارد.
بازگشت به نمادهای « در میان » و « بین »: اول، این درونیابی « در میان » مقادیر ترجمه در سه فرآیند جداگانه برای یک موقعیت خاص مورد نیاز برای تبدیل پیادهسازی میشود. سپس، درون یابی خطی بر روی هر مقدار ترجمه محاسبه شده در جهت ” بین ” انجام می شود.
که در آن F k ، در حالی که k∈ [1-4] بیانگر معادلات سهموی درجه سوم است، Z P نشان دهنده مقدار محاسبه شده با درون یابی در مکان، P , pn است، در حالی که n∈ [ x , y ] نشان دهنده سلول داخلی نرمال شده است . مختصات {0 ≤ p n ≤ 1}، H ( i ، j ) مقادیر ذخیره شده در نقاط گوشه شبکه را نشان می دهد و i ، j در حالی که ( i و j) ∈ [1-4] نشان دهنده شاخص چهار در چهار گره همسایه است.
4.2.2. مقادیر چرخش
نمایش زوایای اویلر شاید رایج ترین پارامترسازی فضای جهت گیری سه بعدی باشد. یک رویکرد ساده برای درونیابی مقادیر چرخش ممکن است فرآیندهای مستقل و مجزا بین هر یک از سه زاویه اویلر را به منظور ایجاد موقعیتهای میانجی مورد نیاز پیشنهاد کند. نتیجه این حرکت باعث ایجاد حرکتی میشود که با چرخشی مشخص میشود که منقبض شده، گاهی اوقات پرش به نظر میرسد، پیوسته و نامشخص نیست. این عمدتاً به دلیل این واقعیت است که زوایای اویلر تعامل رول ها در مورد محورهای جداگانه را نادیده می گیرند. از این رو، یک مسیر منحصر به فرد بین هر دو جهت در سراسر سیستم های مختصات مختلف وجود ندارد. بنابراین، یک وابستگی بین سه محور وجود دارد [ 19]. چرخش حاصل به ترتیب انجام سه چرخش بستگی دارد، که باعث ایجاد ابهام بیشتر می شود که همزمان با این واقعیت است که چرخش در فضا به طور کلی جابجا نمی شود.
بنابراین علامت کواترنیون برای تعریف یک سیستم اعداد سه بعدی با یک سیستم چهار بعدی [ 20 ] داده می شود (شایان ذکر است که ترجمه نمایش زوایای اویلر به کواترنیون یک شامل چندین عبارت ریاضی ساده است). چهار عدد کواترنیون یک چرخش و به دنبال آن یک مقیاس بندی را توصیف می کنند. هر شیء کواترنیونی شامل چهار متغیر اسکالر است که از این رو می توان آنها را به صورت یک واحد به روشی مشابه با جبر معمول اعداد اضافه و ضرب کرد. با این حال، مانند جبر ماتریسی، ضرب کواترنیونی جابجایی نیست. کواترنیون ها چهار بعد دارند: یکی واقعی و سه بعد خیالی. هر یک از ابعاد موهومی دارای مقدار واحد جذر (-1) است، که همه متقابلا بر یکدیگر عمود هستند که به عنوان i شناخته می شود., j و k . نماد یک کواترنیون در رابطه (9) آورده شده است، که در آن W بخش اسکالر کواترنیون و ( X ، Y ، Z ) قسمت برداری با محورهای i ، j و k هستند. کاربرد عملی اصلی علامت گذاری چهاربعدی در نمایش چرخش های سه بعدی است، در حالی که آن را به آنهایی با قدر واحد محدود می کند.
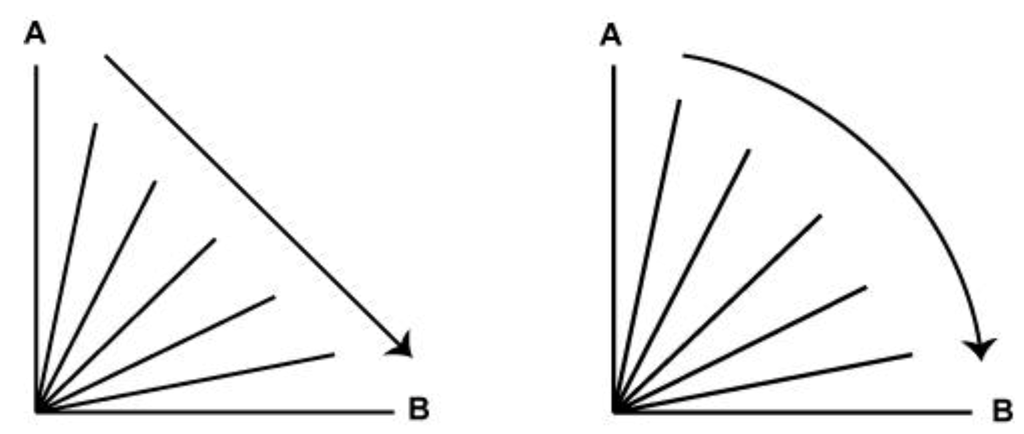
درونیابی خطی ساده بین دو ربع کلیدی منجر به یک خط مستقیم می شود که هندسه طبیعی فضای چرخش را نادیده می گیرد: چرخش درون یابی شده منجر به حرکتی می شود که در وسط سرعت می گیرد. این به این دلیل است که درون یابی خطی روی سطح ابرکره در حال حرکت نیست، بلکه در سراسر آن را قطع می کند. حرکت مورد نیاز حرکتی است که سرعتش افزایش نمییابد، اما سرعت ثابت ( یعنی شتاب صفر) را روی آن نگه میدارد. این نیاز خود را از نظر هندسی به یک قوس بزرگ تبدیل میکند که بین دو واحد-کواترنیون کلیدی داده شده، یعنی درونیابی خطی کروی (SLERP)، که در شکل 8 نشان داده شده است، که یک مسیر منحصر به فرد و صحیح را تحت هر شرایطی تضمین میکند [ 21 ] تبدیل میشود.]، نشان داده شده در معادله (10):
که در آن q 1 و q 2 دو جهت کلیدی واحد-کواترنیون هستند، θ زاویه بین این بردارها است، q i – که یک زاویه، t را با q 1 ایجاد می کند (در حالی که t ∈ [0,1]) – از یک مشتق شده است. درونیابی کروی بین بردارها، q 1 و q 2 .
SLERP برای درون یابی ” بین ” بین هر مقدار چرخش داده شده مورد نیاز است. یک ترتیب درون یابی بالاتر برای ساختار شبکه ماتریس DTPM جهت گیری ها در یک سلول شبکه، به عنوان مثال ، ” در میان ” مورد نیاز است. ایده این است که دنباله ای از SLERP ها را بر روی واحد-کواترنیون های داده شده محاسبه کنیم. این روش ساخت یک مکعب را به عنوان یک سری از سه درون یابی خطی کروی از چهار ضلعی از واحد-کواترنیون ها بر روی سطح یک ابرکره واحد 4 بعدی امکان پذیر می کند. با انجام این کار، محاسبه هر جهت گیری میانجی توسط یک سری از SLERP ها به دست می آید. Cayley [ 21 ] این روش را به صورت کروی و چهار گوش (SQUAD) تعریف کرد. بنابراین، داشتن یک شبکه از چهار جهت گوشه { q 0 ،q 1 , q 2 , q 3 } سه مرحله از توالی SLERP را می توان پیشنهاد داد. این معادل منحنی بزیه با درون یابی مکعبی کروی است که در معادله (11) نشان داده شده است. با این حال، ضرب کواترنیونی یک جابجایی نیست. بنابراین، ترتیب اجرای این دنباله SQUAD باید در نظر گرفته شود.
شکل 8. نمایش مفهومی درونیابی خطی کروی (SLERP): به جای یک درونیابی خطی ساده ( سمت چپ ) SLERP ثابت نگه داشتن سرعت را در سطح ابرکره ( راست ) تضمین می کند .
5. تجزیه و تحلیل آماری
از آنجایی که مکانیسم های درون یابی مورد بحث در بخش 4.2.1 و بخش 4.2.2 به طور خاص برای درونیابی پارامترهای تبدیل ذخیره شده در DTPM طراحی نشده اند، این بخش می خواهد تأیید کند که در واقع می توان از آنها برای این منظور استفاده کرد. علاوه بر این، همانطور که در بخش 4.2.2 بحث شد ، ضرب کواترنیونی جابجایی نیست، بنابراین، ممکن است محدودیتهایی در مورد دنباله SQUAD اجرا شده وجود داشته باشد. این در بخش 5.2 تحلیل و تشریح شده است.
5.1. پارامترهای ترجمه
دو نمونه از درونیابی سهموی درجه سوم دو جهته پیشنهادی در شکل 9 نشان داده شده است. داده های منبع یک ماتریس تبدیل DTPM با وضوح 700 متر است که از استفاده از فریم های 1 کیلومتر مربعی ( با تقریباً 30 درصد همپوشانی) فرآیند ICP به دست می آید. رزولوشن مورد نظر 50 متر از DTM های مورد استفاده به دست می آید. محاسبه مقادیر ترجمه برای یک مکان خاص (به عنوان مثال ، ” در میان”)، در حالی که از وضوح شبکه ماتریس 700 متر به وضوح 50 متر DTM مورد نظر تغییر می کند، تداوم را حفظ می کند و درون یابی صاف را در کل منطقه پوشش تضمین می کند. خروجی یک محاسبه مقدار ترجمه دقیق تر و پیوسته در کل منطقه مورد نیاز برای محاسبه توپوگرافی میانی است.
شکل 9. درونیابی سهموی درجه سوم دو جهته برای مقادیر ترجمه t x (چپ) و t z (راست). ( b ) و ( d ) در وضوح اصلی 700 m DTPM نمایش داده می شوند، در حالی که ( a ) و ( c ) در وضوح 50 متری حاصله که برای شکلگیری و ترکیب لازم است نمایش داده میشوند.
5.2. پارامترهای چرخش
از آنجایی که ضرب کواترنیون جابجایی نیست، ترتیب نحوه انجام درونیابی های SLERP در هر اجرای SQUAD ممکن است بر مقادیر چرخش حاصل تأثیر بگذارد و بنابراین، بر قابلیت اطمینان انیمیشن تولید شده با ایجاد مصنوعات توپوگرافی تأثیر بگذارد. برای مثال، با تکیه بر این واقعیت که اندازه شبکه ماتریس استفاده شده در درون یابی 700 متر عرض است (مانند بخش 5.1 )، یک مقدار اختلاف درونیابی نادرست یک درجه اعشاری منجر به جابجایی موقعیت حداکثر شش متری می شود.
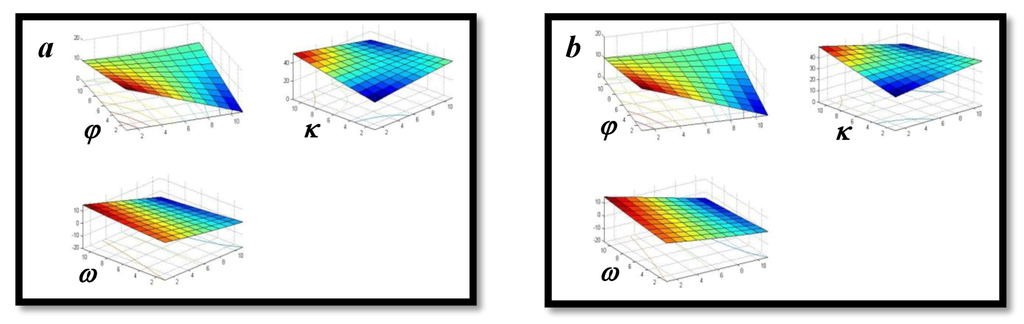
برای تعیین کمیت این نارسایی، یک ارزیابی تجزیه و تحلیل مصنوعی انجام می شود که در آن مقادیر ثبت بزرگ زوایای چرخش در نظر گرفته شده است. مقادیر بزرگی عمداً برای اطمینان از قابلیت اطمینان این مکانیسم درونیابی مورد استفاده استفاده شد. شکل 10 به طور شماتیک این را نشان می دهد، در حالی که چهار گوشه نشان دهنده یک سلول DTPM واحد با مقادیر ثبت چرخش استفاده شده است. یک شبکه 11 در 11 برای پوشش سلول (در مجموع 121 موقعیت) ایجاد شد که در آن برای هر موقعیت، دو محاسبه دنباله SQUAD اجرا شد: دنباله درونیابی a- دو SLERP بر روی دو زوج افقی ( q 1 -q 2 و q 4 -q 3)، به دنبال آن یک SLERP بر روی مقادیر کواترنیون های حاصل. و b- دو SLERP روی دو زوج عمودی ( q 1 -q 4 و q 2 -q 3 ) و به دنبال آن یک SLERP در مقادیر کواترنیون های حاصل. این تجزیه و تحلیل برای تعیین کمیت و ارزیابی اینکه آیا انتخاب یک دنباله خاص ( a یا b ) تأثیر کمی بر نتیجه مقادیر درونیابی محاسبه شده دارد یا خیر، به عنوان مثال ، اندازه گیری خطای جابجایی منتسب انجام می شود. بنابراین، برای تمام 121 موقعیت، دو مجموعه از چهار مقدار ضرایب واحد کواترنیون محاسبه میشود ( W , x , y , z) در نتیجه، سه مقدار زاویه اویلر، ( φ ، κ ، ω ) تولید میشود، که امکان تحلیل کمی تفاوتهای این دو مجموعه از مقادیر چرخش را فراهم میکند.
شکل 11 یک نمایش مش از تمام 121 مقدار ضرایب چهار واحد کواترنیون محاسبه شده از طریق دو دنباله SQUAD – a و b را نشان می دهد. مقایسه بصری این دو مجموعه – به ترتیب چپ و راست – تفاوت قابل توجهی مشهود نیست. هنگام مقایسه مقادیر دریافتی، حداکثر مقدار تفاوت 0.01 در ضریب W با مقادیر تفاوت قابل توجهی کمتر برای همه ضرایب باقی مانده وجود دارد. علاوه بر این، آشکار است که مقادیر در کل ناحیه سلول صاف و پیوسته هستند و تغییر ناگهانی در مقدار ندارند.
شکل 12 تمام 121 مقدار سه زاویه چرخش اویلر را نشان می دهد که از طریق دو دنباله SQUAD – a و b (پس از ترجمه آنها از دامنه چهاربعدی 4D) دریافت شده است. با بررسی مقادیر دریافتی، تفاوت معنی داری برای هر سه ضریب وجود ندارد: حداکثر 0.004 درجه اعشار. مقادیر در کل ناحیه سلول صاف و پیوسته هستند، بدون تغییر ناگهانی در مقدار.
شکل 10. تک سلولی DTPM با دو دنباله کروی و چهار گوش (SQUAD) که به صورت سهمی حرکتی (قوس) – گره های جهت گیری q i { i ∈ [1-4]} مقادیر ( φ ، κ ، ω ) بر حسب درجه داده شده است.
شکل 11. چهار مقدار ضریب واحد-کواترنیون محاسبه شده از طریق دو دنباله SQUAD متفاوت- a ( سمت چپ ) و b ( راست ) ( a و b به عنوان حرکت سهمی در شکل 9 نشان داده شده اند ) .
شکل 12. سه مقدار زاویه اویلر که از طریق دو دنباله SQUAD مختلف محاسبه شده اند- a ( سمت چپ ) و b ( راست ) ( a و b به عنوان حرکت سهمی در شکل 9 نشان داده شده اند ) .
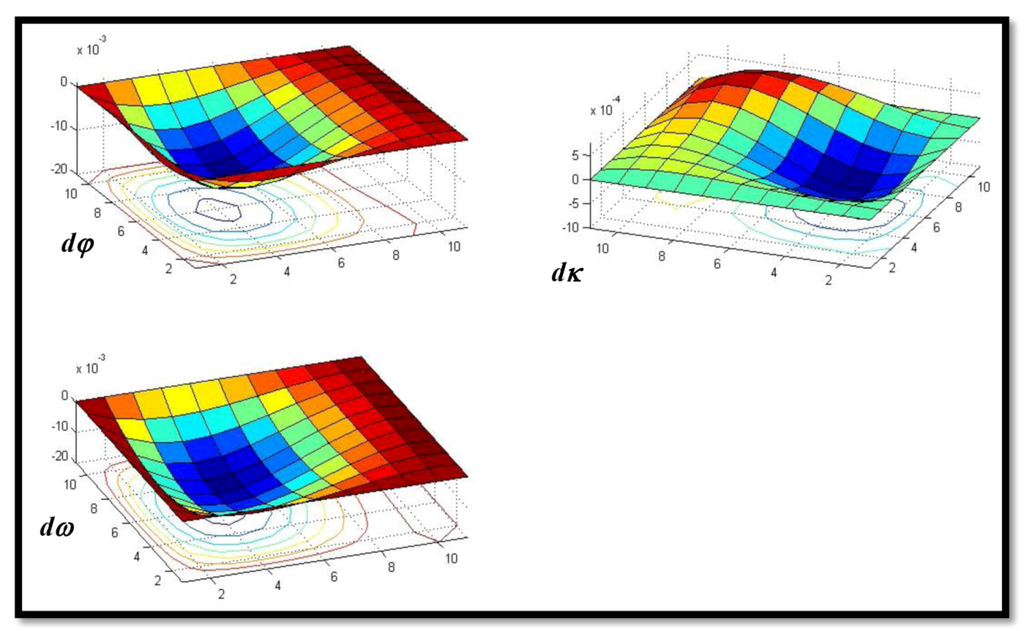
شکل 13 تفاوت مقادیر بین سه زاویه چرخش اویلر دریافت شده از طریق دو دنباله SQUAD را نشان می دهد. اگرچه تغییرات کمی در مقدار وجود دارد – میانگین اختلاف زاویه ای تقریباً 4 × 10-3 درجه اعشار – این مقادیر به اندازه کافی مهم نیستند که روی روش های پیشنهاد شده در اینجا تأثیر بگذارند: با اندازه سلول DTPM که در درون یابی عرض 700 متر استفاده می شود، در نتیجه مقدار اختلاف درون یابی « در میان » تأثیری کمتر از 2 سانتی متر بر مقادیر جابجایی خواهد داشت (در مقیاس 1:35000). در DTM های پوشش دهی بزرگ با وضوح ده ها تا صدها متر انجام می شود، نتیجه حاصل هنوز بسیار قابل اعتماد است.
در شکل 13 قابل مشاهده است که در مرز سلول، تفاوت ها صفر است، که نشان می دهد فرآیند صحیح است (SQUAD روی مرزها در واقع به اجرای SLERP ترجمه شده است). مقادیر تفاوت به سمت مرکز سلول افزایش می یابد که نتیجه مفاهیم ریاضی SQUAD و SLERP است. جدول 1 مقادیر میانگین و انحراف معیار (SD) محاسبه شده برای این تفاوت های زاویه ای را نشان می دهد.
شایان ذکر است که مقادیر چرخش ذخیره شده در DTPM معمولاً کوچکتر از مقادیر مورد استفاده در این تجزیه و تحلیل هستند: معمولاً چندین درجه اعشاری نسبت به ده ها مورد استفاده در اینجا وجود دارد. بنابراین می توان نتیجه گرفت که استفاده از فضای کواترنیونی و مفاهیم درون یابی SLERP و SQUAD قابل اعتماد بوده و نتایج کیفی ایجاد می کند. بنابراین، به مکانیسم و مفاهیم پیادهسازی شده در اینجا کمک میکند.
شکل 13. مقادیر تفاوت بین سه زاویه اویلر محاسبه شده از طریق دو دنباله SQUAD مختلف – مقادیر در درجه اعشار (محور z).
جدول 1. مقادیر اختلاف زاویه ای میانگین و SD برای دو دنباله SQUAD مختلف.
6. نتایج
کل فرآیند با محیط کاری Matlab R2013a برنامهریزی شد و بر روی یک ایستگاه کاری رایانه شخصی (ویندوز 7 با پردازنده i5 و رم 4G) پیادهسازی شد. مدت زمان پردازش بستگی به منطقه پوشش DTM تجزیه و تحلیل شده دارد. یک فرآیند واحد، به عنوان مثال ، شناسایی نقطه بهره، ثبت، تطبیق و درونیابی به یک موقعیت میانی مشخص، در دو DTM با مساحت پوشش تقریباً 100 کیلومتر مربعکمتر از 60 ثانیه طول می کشد اگرچه این طرح برای داشتن قابلیتهای بلادرنگ، با زبان برنامهنویسی و واحد پردازش مورد نیاز (مثلاً ++C و ایستگاه کاری سرور) توسعه نیافته است، این طرح ممکن است پتانسیل تقریباً بیدرنگ برای پردازش یک منطقه نسبتاً کوچک تا متوسط را ارائه دهد. بر اساس تجربه و آزمایش های قبلی، کل زمان پردازش را می توان به یک ثانیه کاهش داد.
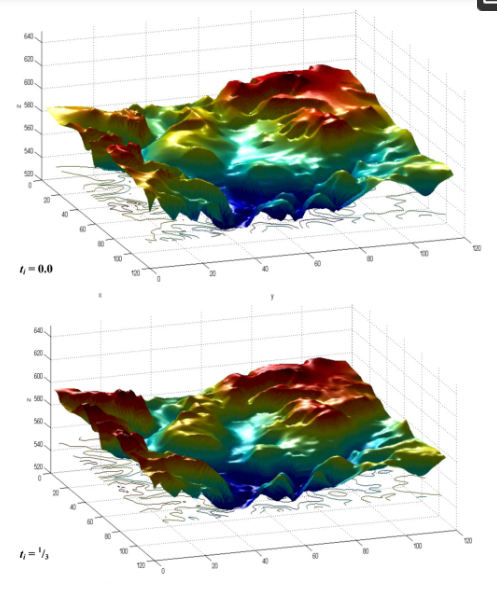
می توان فرض کرد که دو مجموعه داده توپوگرافی معین دو دوره را نشان می دهند: t 0 = 0 و t 1 = 1، به ترتیب (منبع و هدف). دانستن روابط متقابل محلی کامل (مطابقات) بین این «زمانها» که در DTPM ذخیره میشوند، محاسبه هر موقعیت متوسط زمانی (یا صحنه) t i را امکانپذیر میسازد (در حالی که t i ∈ [0,1]، جایی که، از لحاظ نظری ، من∈ [0،∞]) در امتداد مسیر راس منبع به هدف. توپوگرافی میانی تولید شده به هندسه های موجود و همچنین تغییرات مورفولوژیکی رخ داده (تطابق رئوس) صادق است. این امکان تجسم کامل و جامع سه بعدی و ساخت شبیه سازی توپوگرافی چند زمانی را از طریق درونیابی در تمام شش مقدار تبدیل مربوط به هر نقطه در مجموعه داده منبع که به موقعیت پیش بینی شده خود در هدف تبدیل می شود، می دهد.
شکل 14. صحنه میانی t i = 1/3 ( ردیف پایین) تولید شده ، در حالی که از داده های ذخیره شده در منبع ( t 0 = 0.0، ردیف بالا ) و مجموعه داده های توپوگرافی هدف ( t 1 = 1.0، شکل 14 ردیف پایین ) و DTPM ( ارقام بدون مقیاس هستند، محور z بر حسب متر).
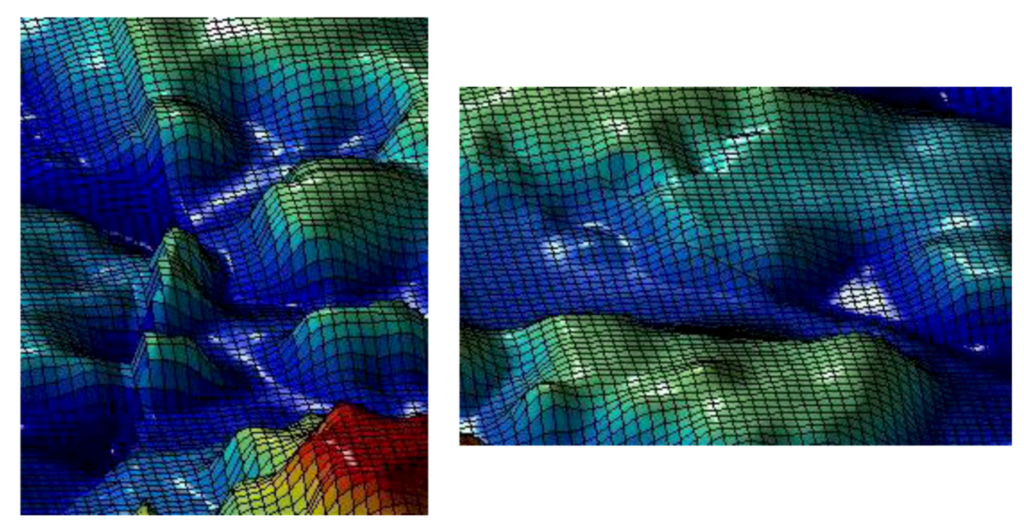
شکل 15. صحنه میانی t i = 2/3 ( ردیف بالا ) با استفاده از داده های ذخیره شده در منبع ( t 0 = 0.0، شکل 13 ردیف بالا) و مجموعه داده های توپوگرافی هدف ( t 1 = 1.0، ردیف پایین ) و DTPM (شکل ها) تولید می شود. بدون مقیاس هستند، محور z بر حسب متر).
شکل 14 ، شکل 15 تجسم صحنه میانی پیشنهادی را بر روی دو DTM نشان میدهد که هر دو مساحت 40 کیلومتر مربع را پوشش میدهند . منبع DTM از طریق ابزارهای فتوگرامتری با استفاده از تصاویر ماهواره ای با وضوح پایین تولید شد، در حالی که DTM هدف از طریق دیجیتالی کردن نقشه خطوط ارتفاع 1:50000 تولید شد. هر دو DTM وضوح 50 متر و دقت تقریباً یکسانی دارند. ردیف بالا در شکل 14 منبع DTM را نشان می دهد ( t 0 = 0.0)، در حالی که ردیف پایین در شکل 15 DTM هدف را نشان می دهد ( t 1= 1.0). مکانیسم مدلسازی سلسله مراتبی کاملاً خودکار پیادهسازی میشود که منجر به استخراج سطوح مختلف کامل روابط متقابل هندسی و مطابقت هر دو DTM ذخیره شده در DTPM میشود (مقادیر ترجمه استخراجشده عبارتند از: t x = 124.6 m (~2.5 سلول وضوح)، t y = -50.1 m (~1 سلول) و t z = 30.0 m؛ همه مقادیر چرخش چندین درجه اعشاری هستند. تجسم “زمان”، t i = 1 / 3 و t i = 2 / 3 ، ارائه شده است – ردیف پایین در شکل 14 و ردیف بالا در شکل 15به ترتیب – در حالی که از تمام شش پارامتر تبدیل و مفاهیم درون یابی طراحی شده استفاده می شود. در حالی که توپوگرافی منبع و هدف مورفولوژی و بازنمایی متفاوتی را ارائه میدهند، نتیجه یک انتقال طبیعی در فضای بین دو سطح فیزیکی را نشان میدهد و بر مصنوعات غیرواقعی غلبه میکند که ممکن است در غیر این صورت رخ دهند. تجسم صحنه میانی شبیه ویژگیهای مورفولوژیکی موجود است، از نظر فضایی تغییر شکل داده و تغییر شکل میدهد (شکلسازی و ترکیب) از یک توپوگرافی به توپوگرافی دیگر.
علاوه بر این، می توان یک سری صحنه های میانی تولید کرد، در حالی که از t 0 = 0.0 تا t 1 = 1.0 در صحنه های فاصله Δt تجسم کرد. هرچه Δt کوچکتر باشد ( Δt → 0)، انتقال ارائه شده توسط صحنه های میانی پیوسته تر خواهد بود. ترکیب این صحنه ها با هم به دنباله ای متحرک از تمام حالت های گذار، یعنی صحنه ها، از یک توپوگرافی به توپوگرافی دیگر منجر می شود. این می تواند دانشی در مورد تغییرات مورفولوژیکی فرضی، که بین دو دوره داده توپوگرافی داده شده رخ داده است، ارائه دهد. یک مثال بر روی مجموعه داده های توپوگرافی بالا با فاصله Δt انجام شده است= 0.01، به عنوان مثال، 100 صحنه میانی را می توان در این آدرس مشاهده کرد: http://youtu.be/ZdTU8saqaV4 .
7. نتیجه گیری و بحث
برنامههای کاربردی متحرک و GIS استاندارد که برای مدلسازی مجموعه دادههای توپوگرافی طراحی شدهاند، عمدتاً بر اساس سیستمهای مرجع مختصات متقابل مجموعه دادهها و مجموعهای هندسی سادهشده از قوانین هستند. این معمولاً در تضاد با واقعیت فیزیکی و تغییراتی است که این مجموعه دادهها ارائه میکنند. مفهوم متداول “صفحه تلنگر” تلاشی برای حل روابط موجود متقابل نیست، بلکه فقط برای تولید یک شبیه سازی و نمایش انتزاعی و ساده شده تلاش می کند. الگوریتمهای ترکیب شکل و شکلگیری شکل معمولاً به مداخله دستی نیاز دارند و پیچیدگی مورد نیاز را حل میکنند.
از سوی دیگر، مکانیسم مدلسازی سلسله مراتبی پیشنهادی، از سطح متفاوتی از همبستگیها و روابط متقابل استفاده میکند که به طور خودکار پیشینی به صورت محلی مدلسازی میشوند. این مجموعه تناظرهای قابل اعتماد و قوی به عنوان یک مدل پارامترهای تبدیل دیجیتالی تعریف میشوند که برای تجسم دقیق و قابل اعتماد وابسته به زمان صحنههای میانی چند زمانی، به عنوان مثال ، شبیهسازی و انیمیشن استفاده میشود. چندین الگوریتم درون یابی معرفی شدهاند که برای مدیریت صحیح دادهها از مقادیر تبدیل گسسته ذخیره شده در DTPM طراحی شدهاند، بنابراین امکان اجرای تجزیه و تحلیل شبیهسازی زمینگرا پیوسته را فراهم میکنند.
مکانیسم مدلسازی سلسله مراتبی ما را قادر میسازد تا از طریق مفهوم استفاده از چندین سطح متوالی مدلسازی فضایی، نادرستیها و اختلافهای موجود بین مجموعه دادههای توپوگرافی را دقیقاً کمیت کنیم. این ما را قادر میسازد تا همبستگیهای متقابل موجود و از این رو، پدیده نظارت و مدلسازی را استخراج کنیم که فقط به صورت محلی برای تجسم چندزمانی واقعیتر و کیفیتر مشخص میشوند. شایان ذکر است که این مفهوم صرفاً به پیادهسازی تجسم محدود نمیشود، زیرا سایر وظایف تجزیه و تحلیل دقیق و قابل اعتماد GIS جغرافیایی بر اساس این مکانیسم جدید قابل پیادهسازی هستند.




















بدون نظر