


چکیده
:
ارزیابی تأثیر منظر عمومی تأسیسات انرژی تجدیدپذیر برای پذیرش آنها بسیار مهم است. بنابراین، یک مبنای ارزیابی صحیح در فرآیند اجرا بسیار مهم است. برای ارزش گذاری ادراک منظره، حس بصری جزء حسی غالب انسان است. با این حال، حس بصری فقط اطلاعات جزئی در مورد محیط ما ارائه می دهد. به خصوص وقتی نوبت به ارزیابی مزارع بادی می رسد، سر و صدای تولید شده توسط پره های چرخان توربین یکی دیگر از عوامل تاثیرگذاری اصلی است. بنابراین، یک ارزیابی بصری و صوتی یکپارچه از پروژههای مزرعه بادی مورد نیاز است تا به افراد عادی اجازه دهد تا تأثیر آنها را به اندازه کافی درک کنند. این مقاله رویکردی برای پیوند شنیدنهای ارجاعشده فضایی به یک مدل منظره سه بعدی مجازی مبتنی بر GIS ارائه میکند. ما نشان می دهیم که چگونه از یک موتور بازی برای تجسم سه بعدی پارک های بادی استفاده کنیم، استفاده از داده های جغرافیایی به عنوان مبنای مدل سازی به طور خاص، کنترل و ضبط پارامترهای خاص در موتور بازی به منظور ایجاد پیوند به مدل آکوستیک نشان داده شده است. نمونه اولیه پتانسیل بالایی برای تکمیل ابزارهای مرسوم برای ارزیابی اثرات عمومی بهبود یافته مزارع بادی دارد.
کلید واژه ها:
برنامه ریزی مزرعه بادی ; صدای توربین بادی ; ارزیابی تاثیر منظر ; تجسم سه بعدی مبتنی بر GIS موتور بازی ; شنیدن ; شبیه سازی بصری-آکوستیک

1. مقدمه
برنامه ریزی تاسیسات جدید انرژی های تجدیدپذیر در چشم انداز یک موضوع پیچیده در سوئیس و در سراسر اروپا است. اگرچه عموم مردم به طور کلی از استقرار انرژی های تجدید پذیر حمایت می کنند، اجرای تاسیسات جدید اغلب در انتخاب مکان های مناسب با شکست مواجه می شود، به ویژه در مورد مکان های مزرعه بادی در سطح محلی [ 1 ، 2 ]. کاول [ 3 ] به “شکاف بین فنی و اجتماعی” به عنوان یک مشکل کلیدی اشاره می کند: پتانسیل فنی به عنوان مبنایی برای اهداف ملی انرژی بادی در یک رویکرد از بالا به پایین در نظر گرفته می شود (به عنوان مثال، [ 4 ]])، فاقد قضاوت عمومی در مورد مقبولیت در مکان های خاص. با این حال، طبق مطالعات اخیر، پذیرش اجتماعی یک موضوع کلیدی برای توسعه موفق بازار انرژی بادی است [ 5 ، 6 ]. علاوه بر این، ذینفعان بیان می کنند که ابزار مناسبی برای حمایت از پذیرش اجتماعی وجود ندارد [ 7 ].
تأثیر زیرساختهای جدید بر نوع خاصی از منظره که با کیفیت زیباییشناختی و حس مکان مشخص میشود، یکی از مهمترین عوامل توضیح دهنده حمایت یا رد مزارع بادی است [ 1 ، 2 ]. اگرچه حس بصری جزء حسی غالب انسان برای درک منظره است، اما فقط اطلاعات جزئی در مورد محیط ما ارائه می دهد [ 8 ]. بنابراین، یک رویکرد چند حسی برای ارزیابی منظر مورد نیاز است. با توجه به پارک های بادی، مردم سر و صدای تولید شده توسط پره های چرخان توربین را به عنوان یکی از برجسته ترین عوامل مزاحم درک می کنند [ 9 ، 10 ] که با نگرش بصری توربین های بادی در چشم انداز مرتبط است [ 11 ]]. از این رو، نیاز شدیدی به ادغام این عامل کیفیت چشمانداز در برنامهریزی سایت مزارع بادی وجود دارد تا امکان شناسایی مکانهای پذیرفتهشده اجتماعی برای فناوریهای انرژی بادی فراهم شود.
1.1. پیشرفت های تکنولوژیکی در تجسم منظر دیجیتال
در چند دهه گذشته، پیشرفت های تکنولوژیکی در ابزارها و تکنیک های تجسم منظر دیجیتال به برنامه ریزان منظر و شهری اجازه می دهد تا از تجسم های سه بعدی دیجیتال به عنوان یک ویژگی مشترک برای طراحی، برنامه ریزی و مدیریت منظر استفاده کنند [ 8 ]. پوشش گیاهی سه بعدی بسیار دقیق برای تجسم منظره (به عنوان مثال، گیاهان Laubwerk [ 12 ]، XfrogPlants [ 13 ] یا SpeedTree Toolkit [ 14 ])، نمایشهای واقعیت افزوده یکپارچه و سیستم اطلاعات جغرافیایی (GIS) [ 15 ]، قابلیتهای چند بازیکن، و امکانات ارتباطی [ 16 ، 17 ، 18] تنها چند نمونه هستند. این پیشرفتها دارای پتانسیل زیادی برای برنامهریزان منظر در کاربردهای متنوعی مانند اهداف مشارکتی، ارتباطات، ارزیابی سناریو و فرآیند تصمیمگیری است [ 19 ]. تجسم های سه بعدی مبتنی بر GIS ثابت کرده است که ارتباط بین ذینفعان مختلف، متخصصان و مردم را در زمینه توسعه مشارکتی انرژی بادی تسهیل می کند [ 20 ، 21 ]. در زمینه برنامه ریزی منظر، موتورهای بازی در حال حاضر در حال ظهور ابزارهای مدل سازی جالبی را ارائه می دهند که تجسم های پیشرفته را ارائه می دهند [ 22 ]. موتورهای بازی برنامههای نرمافزاری شامل ماژولهای مختلف برای نمایشهای دو بعدی و سه بعدی و محاسبات فیزیک عمومی هستند [ 23 ].] برای طراحی بازی های کامپیوتری. این موتورها امکان سطح بالایی از تعامل را فراهم می کنند و از قابلیت های چند نفره با ارتباطات آنلاین پشتیبانی می کنند [ 19 ]. برخی از آنها در صورت استفاده غیرتجاری با قیمت های پایین در دسترس هستند و برای اجرا بر روی رایانه های کم هزینه نیز طراحی شده اند [ 22 ، 24 ]]. یکی از مزیتهای اصلی موتورهای بازی، توانایی ایجاد تصاویر در زمان واقعی است، که نیازی به مرحله رندر زمانبر ندارد، جایی که هر موقعیت دوربین و پارامتر فیزیکی باید قبل از ارائه تصویرسازی تنظیم شود. در عوض، تجسمهای بیدرنگ به کاربر اجازه میدهد آزادانه در محیط حرکت کند و به صورت پویا پارامترهای فیزیکی را در منظر مجازی، مانند تنظیمات روز یا شرایط آب و هوایی تغییر دهد. توانایی موتورهای بازی در ایجاد مناظر مجازی با پارامترهای دنیای واقعی قابل کنترل و تغییر میتواند به ابزار برنامهریزی مناسبی برای پشتیبانی از ارتباطات در فرآیندهای تصمیمگیری منجر شود. اسقف [ 19] بیان میکند که ابزارهای بازی واقعی که بهعنوان یک محیط مجازی مشترک پیکربندی شدهاند، میتوانند به افراد کمک کنند تا مسائل پیچیده را بررسی کنند، مدلهای سناریو را اجرا کنند و برنامههای قابل قبولی را توسعه دهند. علاوه بر این، درک کاربر از دنیای واقعی می تواند توسط تعامل و پویایی محیط های مجازی پشتیبانی شود [ 25 ]. اگر این ابزارهای بازی شامل نیروهای فیزیکی و فرآیندهای حیاتی چشم انداز باشد و همچنین از قابلیت های چند کاربره پشتیبانی کند، ارائه چنین محیط های بازی به جوامع به منظور پیشبرد طراحی مناظر پایدار آینده، توسعه منطقی خواهد بود [ 19 ].
1.2. موتورهای بازی برای تجسم منظره
استفاده از موتور بازی برای تجسم منظره و برنامه ریزی، Stock et al. [ 18 ] نشان داد که چگونه می توان از موتور بازی Torque [ 26 ] برای ایجاد یک سرور نقشه مبتنی بر وب برای ایجاد یک محیط مشترک استفاده کرد. Jacobson و Lewis [ 27 ] با استفاده از موتور Unreal Engine یک طرح واقعیت مجازی غار مانند همهجانبه از مناظر ارائه کردند . Nakevska و همکاران . [ 29 ] نمونههایی از یک محیط غار را با استفاده از CryENGINE Crytek [ 30 ] که با موتور بازی با حسگرها و دستگاههای ورودی برای تعامل با محیط مجازی ارتباط برقرار میکند، نشان میدهد. فریز و همکاران [ 22] قابلیتهای تجسم و تعامل موتورهای بازی مختلف را تجزیه و تحلیل کرد و تصمیم گرفت از CryENGINE برای مدلسازی تجسمهای منظره استفاده کند زیرا زمینهای بزرگ در فضای باز را میتوان به صورت تعاملی تولید و ویرایش کرد. CryENGINE توسط Germanchis و همکاران استفاده شد. [ 31 ، 32 ] همچنین، زیرا CryENGINE پایدارترین، آسان ترین برای یادگیری و قوی ترین موتور برای تولید یک محیط مجازی بود.
مزیت اصلی CryENGINE 3 این است که یک موتور فیزیک را در خود جای داده است که می تواند تقریباً برای تمام اشیاء در دنیای مجازی اعمال شود و امکان تعامل واقعی اجسام با نیروهای فیزیکی مانند باد، گرانش، اصطکاک و برخورد را فراهم می کند [ 30 ]. بنابراین، موتور به اثرات از پیش محاسبهشده متکی نیست، اما قادر به نمایش پدیدههای مبتنی بر فیزیکی مانند شبیهسازی دینامیک روز در زمان واقعی، تغییرات در پوشش گیاهی و حرکت ابرها به دلیل تغییر سرعت باد است [ 33 ].
1.3. موتورهای بازی و اطلاعات جغرافیایی
ژرمنچیس و همکاران [ 31 ، 32 ] از یک گردش کار برای ادغام داده های جغرافیایی در موتور بازی استفاده می کند و داده ها را به شکلی مناسب برای درک محیط بازی تبدیل می کند. گردش کار متشکل از نرم افزارهای مستقل مختلف است، به عنوان مثال، ArcGIS یا Photoshop. Herrlich [ 34 ] ابزاری را برای تبدیل داده های GIS واقعی به منبع مناسب قابل خواندن برای CryENGINE توسعه داد. در فرآیند تبدیل، مختصات گاوس-کروگر به مختصات سطح بازی نگاشت می شود. بعدها، هرلیچ و همکاران. [ 35] نشان می دهد که یک کنسول بازی می تواند به عنوان وسیله ای برای تجسم داده های جغرافیایی و برنامه های کاربردی GIS استفاده شود و راهی برای ادغام استانداردهای CityGML و COLLADA برای تجسم با کیفیت بالا پیشنهاد می کند. با این حال، فریز و همکاران. [ 22 ] بیان میکنند که یکی از مشکلات عمدهای که در طول پروژه آنها با استفاده از دادههای جغرافیایی با موتور بازی با آن مواجه میشوند، فرآیندهای تبدیل دادهها بود، زیرا وضوح ژئوداده معمولاً در مقایسه با وضوح نقشه ارتفاع موتور داخلی بسیار متفاوت است. علاوه بر این، سیستم های مختصات داده های جغرافیایی در مقایسه با سیستم موتور بازی داخلی نیز متفاوت است. برای آشنایی با واردات زمین، اشیاء سه بعدی و سایر دادههای خارجی از نرمافزار GIS، آزمایشهای فشرده زمان اغلب لازم است [ 24 ].
1.4. بازتولید نویز توربین بادی
با توجه به آکوستیک، صدای توربین بادی باید برای برنامه ریزی مزارع بادی آینده بازتولید شود. بنابراین، سیگنالهای صوتی که حاکی از نویز واقعی در یک موقعیت خاص هستند، باید سنتز شوند. انتشار صدا از توربین های بادی از یک جزء مکانیکی و یک جزء آیرودینامیکی تشکیل شده است. صدای مکانیکی توسط گیربکس و سایر قسمت های متحرک توربین تولید می شود. نویز آیرودینامیکی از طرف دیگر با عبور هوا از پره های روتور ایجاد می شود. بررسیها با آرایههای میکروفون نشان دادهاند که لبه انتهایی سهم اصلی را در نویز کلی ارائه میکند [ 36 ]. این نویز آیرودینامیکی بسیار پهنای باند با افت به سمت فرکانسهای بالاتر است و با روشهای محاسبه عددی قابل پیشبینی است [ 37 و 38، 39 ].
به طور کلی، ابزارهای نرم افزاری پیچیده ای برای تجسم منظره یا شنیدن ارائه شده است. با این حال، انتشار نویز صریح فضایی توربینهای بادی که در تجسمهای منظره سهبعدی ادغام شدهاند، ارائههای واقعی، دقیق و قابل ارزیابی از محیطهای دنیای واقعی هنوز در دسترس نیستند [ 40 ]]. این مقاله توسعه یک شبیهسازی بصری-آکوستیک را توصیف میکند که انتشار و انتشار آکوستیک واقعی را در تجسمهای چشمانداز سهبعدی مبتنی بر GIS برای پشتیبانی از ارزیابی تأثیر منظره ادغام میکند. شبیه سازی بصری با استفاده از یک موتور بازی ایجاد می شود. برای تولید توربین بادی مصنوعی و نویز محیطی، پیادهسازی یک سینت سایزر انتشار و یک فیلتر انتشار و همچنین یک سیستم تولید مثل توسعه داده شده است. سپس شبیه سازی های بصری و صوتی بر اساس پارامترهای پیوند دهنده به هم متصل می شوند. این پارامترها را می توان از طریق شبیه سازی بصری کنترل کرد و به شبیه سازی صوتی منتقل شد تا به درستی منظره صوتی مربوطه را شنید. تمرکز این مقاله مستندسازی روشهای بکار رفته برای توسعه نمونه اولیه شبیهسازی بصری-آکوستیک است.
2. روش ها
ابتدا، فیلم ها و صداهای ضبط شده از یک منطقه مورد مطالعه باید تولید می شد ( بخش 2.1 ). این ضبطها بهعنوان مرجعی برای شبیهسازی مناظر چشمانداز از جمله توربینهای بادی و همچنین برای محیط صوتی صدای توربین بادی عمل میکنند. سپس، با توجه به شبیهسازی بصری ( بخش 2.2 ) فرآیندهای ضروری توصیف میشوند: تبدیل مختصات برای وارد کردن دادههای جغرافیایی، محاسبه مشخصات سرعت باد، و بهینهسازیهای بصری برای دستیابی به سطح مناسبی از واقعگرایی در تجسم. در شبیهسازی صوتی ( بخش 2.3 )، روش شبیهسازی کلی و نرمافزار محاسبه توسعهیافته به اختصار توضیح داده شده است. در نهایت، بخش 2.4نشان می دهد که چگونه هر دو شبیه سازی با هم مرتبط هستند.
2.1. مرجع ویدئو و صدا
Mont Crosin در کانتون برن (سوئیس) به عنوان سایت مرجع برای توسعه ابزار شبیه سازی بصری-آکوستیک انتخاب شد. مزرعه بادی شامل 16 توربین بادی از نوع Vestas است [ 41 ]. در 11 اکتبر 2011 و 2 دسامبر 2011، ضبط های مرجع در Mont Crosin انجام شد: ضبط های ویدئویی و صوتی به عنوان رسانه ای برای مقایسه به منظور توسعه شبیه سازی صوتی و بصری، و برای آزمایش اعتبار ابزار شبیه سازی بصری و صوتی یکپارچه تولید شد. در گام بعدی
قبل از کار میدانی، نقاط مرجع در Mont Crosin تعریف شد که در آن فیلمها و ضبطهای صوتی ساخته میشدند، که برای استفاده به عنوان داده مرجع برای هر دو شبیهسازی صوتی و بصری مناسب بود. بنابراین، جنبه های شنیداری اساسی در نظر گرفته شد، شامل انتشار (نزدیک به یک توربین بادی)، محیط (نزدیک به لبه جنگل)، انتشار (تا فاصله 500 متر تا یک توربین بادی)، و ضبط چند منبع (دو منبع). توربین های بادی از جهات مختلف) [ 42 ]. علاوه بر این، محدودیتهایی برای انتخاب دیدگاهها توسط رفتار عابران پیاده، یعنی ماندن در جادهها ایجاد شد [ 43 ].]. محتوای نماها یک توربین بادی جلویی، یک توربین بادی در پس زمینه، چندین توربین بادی و بدون توربین بادی بود. محتویات مشاهده، به جز “بدون نمای توربین بادی”، برای مقایسه درک انسان از محتویات ضبطشده و شبیهسازیها در مرحله اعتبارسنجی، انجام ارزیابی چشمانداز بصری و صوتی مورد نیاز بود.
به منظور ارزیابی تاثیر صوتی توربینهای بادی بر روی منظره تحت شرایط باد مختلف، یک روز ثبت شده با باد کم (3.4 متر بر ثانیه در ارتفاع 10 متری سطح زمین) و یک روز با باد شدید (10.6 متر بر ثانیه در ارتفاع 10 متری بالا) زمین) انتخاب شدند. اندازه گیری سرعت باد با بادسنج سه بعدی اولتراسونیک انجام شد. صداهای اصلی ضبط شده با میکروفون SPS200 Soundfield گرفته شده است، که در نتیجه باد شدید، باید نزدیک به زمین نصب می شد و مجهز به شیشه جلو و Windjammer Rycote بود. سیستم ضبط بصری شامل یک دوربین رفلکس تک لنز با قابلیت ضبط ویدیو بود. یک لنز 10 تا 20 میلیمتری استفاده شد و روی 10 میلیمتر ثابت شد تا میدان دیدی در حدود 100 درجه را ثبت کند. فیلمهایی برای مشاهده حرکت توربینهای بادی و پوشش گیاهی تحت تأثیر شرایط باد در روزهای ضبط ضبط شد. موقعیت ضبط در میدان، جهت مشاهده، سرعت باد و پارامترهای جهت باد در یک استوری بورد گردآوری شد.
علاوه بر این، تصاویر هوایی از سایت مرجع با استفاده از یک وسیله نقلیه هوایی بدون سرنشین (UAV) گرفته شد. تصاویر هوایی به صورت فتوگرامتری پردازش شدند و یک مدل ارتفاع رقومی (DEM) و همچنین یک عکس ارتو با وضوح در محدوده دسی متر محاسبه شد. این دادههای جغرافیایی نه تنها میتواند بهعنوان مبنایی دقیق و بهروز برای تجسم منظره، بلکه برای تعیین موقعیت صحیح توربینهای بادی در منظر مورد استفاده قرار گیرد. مورد دوم به ویژه سودمند بود زیرا مزرعه بادی اخیراً بزرگ شده بود و تصاویر هوایی موجود قدیمی بودند.
2.2. شبیه سازی بصری
با استفاده از ویرایشگر Sandbox از CryENGINE نسخه 3.3.9 [ 30 ] Crytek، یک تجسم سه بعدی تعاملی مبتنی بر GIS با سطح بالایی از واقع گرایی تولید شد. برای تجسم ساختار چشم انداز از جمله زمین تپه ای سایت مرجع، محیط تجسم به اندازه 8 × 8 کیلومتر تنظیم شد. از آنجایی که دادههای پهپاد تنها 3 کیلومتر مربع از سایت مرجع مونت کروسین را پوشش میدادند، ما تصمیم گرفتیم از دادههای پهپاد عمدتاً برای تعیین قرارگیری صحیح مدلهای سه بعدی استفاده کنیم. بنابراین، شبیهسازی چشمانداز سهبعدی بر اساس یک DEM و یک عکس ارتوفوتوی مونت کروسین از سوئیستوپو [ 44 ] است. علاوه بر این، مدلهای سهبعدی برای پوشش گیاهی، زیرساختها و توربینهای بادی با توجه به مکان واقعی آنها اضافه شد، همانطور که در شکل 1 نشان داده شده است..
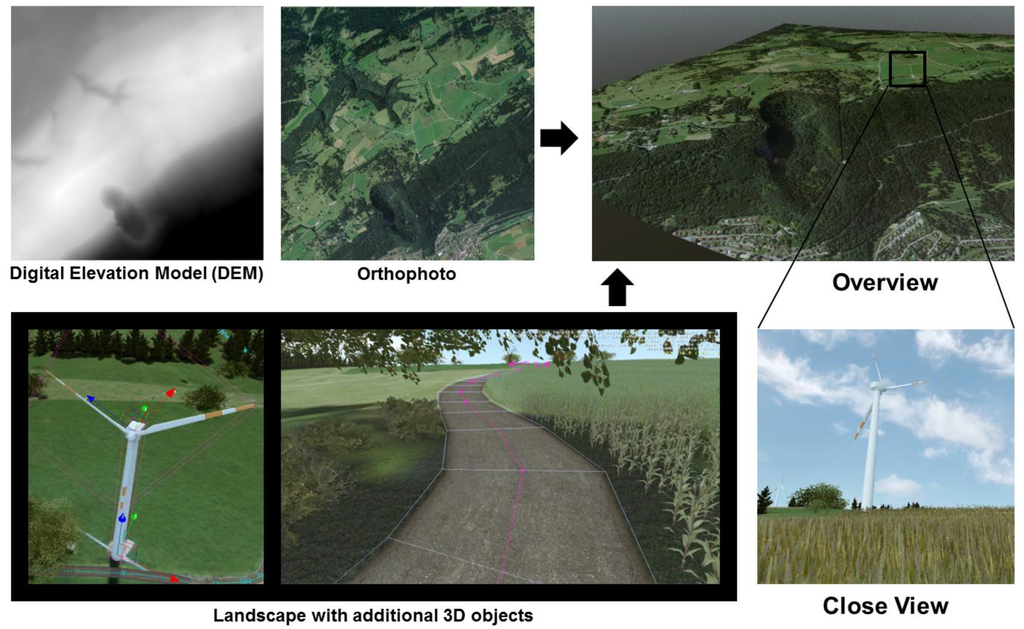
شکل 1. فرآیند شبیه سازی بصری مزرعه بادی در Mont Crosin.
یک وظیفه اصلی وارد کردن و ارجاع داده های جغرافیایی به طور دقیق بود زیرا موتور بازی هنوز یک عملکرد مستقیم GIS را ارائه نمی دهد. بنابراین، قوانین تبدیل تعریف شد، به عنوان مثال، برای وارد کردن مدل ارتفاعی دیجیتال به طوری که ارتفاعات به درستی در مدل سه بعدی مجازی نمایش داده شوند.

شکل 2. مدل رقومی ارتفاعی که با یک عکس ارتوفتو پوشیده شده و توربین های بادی به درستی قرار گرفته اند.
برای این کار، ما از توانایی CryENGINE برای تفسیر مقادیر خاکستری از نقشه ارتفاع [ 45 ] بهره بردیم.]. با استفاده از نقشه ارتفاع 8 بیتی که اجازه 256 مقدار خاکستری را می دهد، منطقه ای با اختلاف ارتفاع بیش از 255 متر باعث می شود وضوح ارتفاع بزرگتر از 1 متر باشد. در منطقه مرجع مونت کروسین، محیط 8 × 8 کیلومتر دارای اختلاف ارتفاع حدود 900 متر است، از جمله کوهی با ارتفاع حدود 1000 متر از سطح دریا. بنابراین، وضوح ارتفاع حدود 3.5 متر در واحد ارتفاع (900 m/256 = 3.53 متر) است. کار با فایل های داده 16 بیتی این مشکل را کاهش می دهد که دارای بیش از 65000 مقدار خاکستری است تا حتی جابجایی های ارتفاع کوچک را نشان دهد. قبل از وارد کردن یک زمین در مقیاس خاکستری، به عنوان مثال، یک DEM مبتنی بر GIS، مقدار “حداکثر ارتفاع” در موتور باید تنظیم شود. “حداکثر ارتفاع” مربوط به حداکثر اختلاف ارتفاع در محیط است که حداکثر ارتفاع منهای حداقل ارتفاع DEM است.33 ]. با استفاده از توابع ویرایش زمین در موتور، ارتفاع را می توان برای دستیابی به نقشه مدل پایه بهتر به نظر رسید [ 45 ]. مدل اصلی حاصل از سایت مرجع در شکل 2 نشان داده شده است .
2.2.1. تحول مختصات
ماژول شنوایی به اطلاعاتی در مورد منبع و موقعیت گیرنده نیاز دارد تا صدای مربوطه را به طور دقیق به نما پیوند دهد. برای بدست آوردن موقعیت کاربر فعلی در تجسم در مختصات دنیای واقعی، پارامترهای تبدیل باید تنظیم شوند که در زمان واقعی به مختصات CryENGINE اعمال می شوند. شنیدن و تجسم بر اساس داده های جغرافیایی در سیستم مختصات سوئیس (LV03) است. از آنجایی که سیستم مختصات سوئیس یک سیستم دکارتی است و تنها دارای مقادیر مختصات مثبت در سوئیس است، فرمول تبدیل را می توان به یک ترجمه ساده کرد. پارامتر ترجمه با مختصات دنیای واقعی مبدا CryENGINE مطابقت دارد که بر تغییر مختصات مبدا بین محیط و CryENGINE دلالت دارد.X CHofCEorigin / Y CHofCEorigin ) به مختصات موقعیت فعلی در CryENGINE ( X CEpos / Y CEpos )، موقعیت دنیای واقعی جانبی کاربر در مختصات سوئیسی در هر زمان مشخص است:
X CHpos = X CEpos + X CHofCEorigin
Y CHpos = Y CEpos + Y CHofCEorigin
مختصات ارتفاع Z CHpos به حداقل ارتفاع محیط تجسم در مختصات سوئیسی Z CHmin و مقدار ارتفاع موقعیت فعلی در CryENGINE Z CEpos بستگی دارد. پارامتر Z CHmin مربوط به مقدار نقشه ارتفاع 0 متر در CryENGINE است.
Z CHpos = Z CHmin + Z CEpos
عوامل تغییر شکل یا اعوجاج بیشتر زمین به دلیل اندازه کوچک محیط در نظر گرفته نشد، جایی که این عوامل ناچیز هستند.
2.2.2. مشخصات سرعت باد
حرکت پوشش گیاهی و سرعت چرخش پره های توربین به جهت و سرعت باد بستگی دارد. بنابراین، الگوریتمی برای تنظیم سرعت و جهت باد توسط تعامل کاربر (به عنوان مثال، ورودیهای کلیدی) که بر حرکت پوشش گیاهی و پرههای توربین بادی در مدل مجازی تأثیر میگذارد، توسعه داده شد. این الگوریتم یک پروفایل سرعت باد را برای محاسبه سرعت باد در ارتفاع هاب فرض می کند. میدان باد با اختلاف فشار در جو تعیین می شود. در نزدیکی سطح زمین به دلیل تلفات اصطکاک سرعت باد کمتر است. علاوه بر این، مشخصات سرعت باد عمودی به پایداری جوی ناشی از لایههای دمایی که بر حرکت عمودی ذرات هوا تأثیر میگذارند، بستگی دارد. پروفیل سرعت باد به صورت زیر محاسبه می شود [ 46 , 47 ,48 ]:


برای محاسبه سرعت باد ( w z ) در یک ارتفاع خاص ( z )، سرعت باد 10 متر بالاتر از سطح زمین ( w 10 m ) و یک توان جوی ( m )) لازم است. در این پروژه سرعت باد در ارتفاع 10 متری از سطح زمین به عنوان پارامتر سرعت باد جهانی و قابل تنظیم در CryENGINE که بر حرکت پوشش گیاهی تأثیر می گذارد، تعریف شده است. سپس سرعت باد در ارتفاع هاب با رابطه (3) محاسبه می شود. توان m وابسته به کلاس پایداری جوی است. این بر اساس تابش خورشیدی فعلی، به ترتیب، پوشش ابر در روز یا شب محاسبه می شود. در تجسم، این را می توان تعریف کرد و به صورت تعاملی بر مشخصات باد و بنابراین سرعت تئوری باد در ارتفاع هاب تأثیر گذاشت.
مشخصات باد در شبیه سازی با استفاده از سیستم برنامه نویسی بصری “Flow Graph” که در ویرایشگر CryENGINE Sandbox تعبیه شده است [ 45 ] نوشته شد. “گراف جریان” یک کتابخانه از توابع ارائه می دهد و آنها و ارتباطات آنها را به صورت بصری نشان می دهد تا به راحتی فرآیندهای منطقی را تولید و کنترل کند. شکل 3 گزیده ای از فرمول پیاده سازی شده معادله (3) را در اسکریپت “Flow Graph” نشان می دهد. همانطور که توربین بادی Vestas V90-2MW سرعت چرخش را برای آستانه های مختلف سرعت باد تغییر می دهد، حالت های چرخش (M0-M3) در میدان ایجاد شد (به بخش 2.3 مراجعه کنید ). سرعت باد در ارتفاع توپی نشان دهنده حالت چرخشی است که توربین بادی در حال حاضر در آن کار می کند. خروجی معادله (3) (در کادر “Math:Mul” در وسطشکل 3 به حالت های چرخش توربین بادی (M0-M3) هدایت می شود، که در آن مقدار حالت مربوطه عملکرد سرعت پره های روتور توربین بادی را تنظیم می کند. در واقع، توربین های بادی هرگز به طور همزمان حرکت نمی کنند. برای راه اندازی توربین های بادی به صورت ناهمزمان در شبیه سازی، یک مقدار تصادفی به سرعت چرخش و به موقعیت اولیه پره های روتور اضافه می شود.

شکل 3. بخش اسکریپت “گراف جریان” در CryENGINE برای کنترل پارامترهای خاص برای محاسبه پروفیل سرعت باد و چرخش توربین بادی متناظر در مدل منظر مجازی توسعه یافته است.
این اسکریپت به کاربر این امکان را می دهد که سرعت و جهت باد را کنترل کند و امکان تغییر چرخش توربین بادی در موتور را در زمان واقعی هنگام راه رفتن در مدل سه بعدی مجازی فراهم می کند.
2.2.3. بهینه سازی های بصری
عناصر منظر تجسم های سه بعدی مانند زمین، پوشش گیاهی و فرم های ساخته شده می توانند سطوح مختلفی از انتزاع داشته باشند [ 49 ]. هر عنصر دارای یک تصویر هندسی است (به عنوان مثال، یک چند ضلعی) با ارتباطی از ویژگی های بافتی در سطح هندسی [ 49 ، 50 ]. Danahy [ 49 ]، Lange [ 51 ] و Wissen [ 50 ] برای بازنمایی خود مقیاس های مختلفی را با توجه به سطح انتزاع خود توصیف می کنند که از بازنمایی های انتزاعی تا واقعی را شامل می شود. لانگ [ 51] بیان میکند که از دیدگاه مدلسازی، تجسم واقعیتر است، بافتها و هندسههای خاصتری برای مدلسازی اشیاء نشاندادهشده استفاده میشوند. علاوه بر این، سطح بالاتری از واقع گرایی را می توان با ادغام و تنظیم شرایط جوی مانند شرایط آب و هوایی، روشنایی طبیعی یا شبیه سازی فرآیندهای دینامیکی به دست آورد [ 52 ، 53 ، 54 ]. در این پروژه سعی کردیم مکان های مرجع را در سطحی بالا اما مناسب از واقع گرایی تجسم کنیم. سطح مناسبی از واقع گرایی باید امکان القای ادراک از منظره شبیه سازی شده را مشابه ضبط های مرجع فراهم کند. برای دستیابی به این هدف، بهینه سازی های بصری زیر اعمال شد.
ویدئوهای مرجع با توجه به جهت گیری و چرخش توربین بادی، روشنایی و شرایط آب و هوایی، و حرکت پوشش گیاهی و همچنین ساختار پوشش گیاهی در چشم انداز (نوع، ارتفاع، تراکم و توزیع) تجزیه و تحلیل شدند. پوشش گیاهی با توجه به سرعت باد اندازه گیری شده در میدان و حرکت در فیلم مرجع متحرک شد و با کمک اضافی تصاویر هوایی پوشش گیاهی به طور دقیق در تجسم قرار گرفت.
شرایط نور با استفاده از توانایی CryENGINE برای شبیهسازی روزهای مختلف تنظیم شد. بر اساس داده های مرجع جمع آوری شده در میدان، روز و شرایط آب و هوایی مانند پوشش ابر، سرعت باد، جهت باد، شدت خورشید و تنظیمات خورشید در موتور بازی تنظیم شد. تنظیمات خورشید امکان تنظیم موقعیت خورشید، جهت خورشید (جهت طلوع خورشید) و روز را فراهم می کند. موقعیت خورشید حاکی از فاصله ای است که محیط از قطب شمال تا قطب جنوب قرار دارد و می توان آن را با استفاده از موقعیت عرض جغرافیایی واقعی محیط تخمین زد (برای مکان مرجع: 48 درجه شمالی در WGS84). از آنجایی که مقادیر موقعیت خورشید CryENGINE از 0 (= قطب شمال) تا 180 (= قطب جنوب) متغیر است [ 33]، مقدار موقعیت خورشید در تنظیمات خورشید برای سایت مرجع 42 است.
علاوه بر این، رنگ ارتوفتو برای مطابقت با رنگ زمین فعلی در ویدئوهای مرجع، با استفاده از یک برنامه ویرایش تصویر، تنظیم شد. این برای وضعیت باد شدید ضروری بود زیرا عکس ارتو در فصل و شرایط آب و هوایی کمی متفاوت از ویدیوهای مرجع گرفته شده است.
برای شرایط باد شدید، آسمان با ابرهای سریع پوشیده شده بود. از آنجایی که این ابرهای متحرک تصوری از یک محیط بادخیز معمولی میدهند، این اثر باید در شبیهسازی بصری نیز با استفاده از ابرهای سهبعدی CryENGINE اجرا شود [ 33 ]. مطابق با جهت حرکت ابر در ویدئوی مرجع، مسیر حرکت ابرهای اصلی در شبیهسازی بصری تعریف شد که منجر به یک اثر باد بصری مناسب در تجسم منظره شد.
برای وضعیت باد کم، قرار گرفتن در معرض مستقیم خورشید در روز ضبط وجود داشت، که باعث ایجاد سایههای متحرک سریع روی زمین از روتورهای توربین بادی و همچنین سایههای ثابت کوچکتر از پوشش گیاهی میشد. با توجه به محاسبه سایه دینامیک CryENGINE، سایهها را میتوان با دقت با توجه به ضبطهای مرجع بازسازی کرد.
مدلهای موجود توربین بادی سهبعدی بهدستآمده از کتابخانه نرمافزار WindPRO [ 55 ] در نرمافزار 3D Studio Max از Autodesk [ 56 ] مطابق با اندازههای توربین بادی در سایت مرجع، از جمله ارتفاع توربینهای بادی، قطر دکل، تغییر اندازه داده شدند. و ابعاد تیغه روتور. علاوه بر این، مواد رنگ توربین بادی به منظور مطابقت با ظاهر و ویژگی های بصری واقعی تنظیم شد. برای به دست آوردن یک فایل شی توربین بادی سه بعدی، قابل خواندن در CryENGINE (به عنوان مثال، cgf.، mtl. و .dds)، صادرکننده پلاگین CryENGINE 3ds Max [ 57] مورد استفاده قرار گرفت. روتور توربین بادی و دکل به عنوان اجسام جداگانه وارد شدند تا روتور را مستقل از دکل متحرک کنند. در نمودار جریان CryENGINE، روتور به یک تابع چرخش مرتبط است که حرکت جهت چرخش (x,y,z) و سرعت چرخش را مشخص میکند. با اتصال روتور توربین بادی به دکل با استفاده از عملکرد “Link Object” CryENGINE، می توان کل جهت توربین بادی را بر اساس جهت باد تغییر داد، در حالی که همه روتورهای توربین بادی را می توان به صورت جداگانه با توجه به سرعت باد هدایت کرد.
همه این تنظیمات بصری منجر به تجسم منظر مناسب شد که سطحی از واقع گرایی مناسب برای ارزیابی ادراک بصری مناظر شبیه سازی شده در بخش اعتبار سنجی پروژه [ 40 ] ارائه کرد.
2.3. شبیه سازی آکوستیک
شبیهسازی صوتی شامل تولید سیگنال صوتی انتشار توربین بادی (1)، فیلتر برای در نظر گرفتن تضعیف انتشار صدا وابسته به فرکانس (2)، تولید یک سیگنال صوتی پسزمینه طبیعی (3)، و تولید مثل توسط بلندگوها است. (4) همانطور که در بلوک دیاگرام در شکل 4 نشان داده شده است.
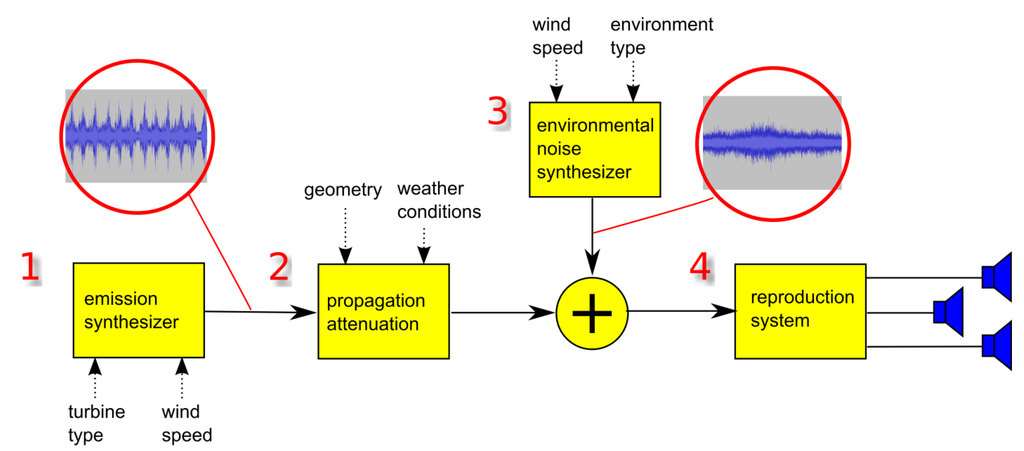
شکل 4. بلوک دیاگرام برای تولید توربین بادی مصنوعی و نویز محیطی.
در مرحله اول، سینت سایزر انتشار (1) برای تولید سیگنال صوتی انتشار توسعه داده شد. یک موضوع کلیدی بررسی وابستگی سیگنال انتشار از نوع توربین و شرایط عملکرد، سرعت باد و طبقه بندی دما بود. از این رو، علاوه بر بررسی میدانی برای ویدئو و صدا مرجع از اکتبر تا دسامبر 2011 (به بخش 2.1 مراجعه کنید.چندین ضبط انتشار توربین های بادی در شرایط عملیاتی متفاوت در سایت مرجع در مونت کروسین گرفته شد. به جای یک رابطه مستمر مورد انتظار بین سرعت باد و سرعت چرخشی، اندازهگیریها روی توربینهای Vestas V90-2MW حالتهای عملیاتی گسسته (M0-M3) را نشان دادند. یک مدل سنتز برای تولید سیگنال های صوتی انتشار Vestas V90-2MW در نرم افزار Matlab [ 58 ] توسعه و پیاده سازی شد.
در مرحله دوم، میرایی انتشار صدا وابسته به فرکانس (2) محاسبه و به صورت یک سری فیلتر دیجیتال پیاده سازی شد. برای این منظور، برنامه کامپیوتری AuraPRO در شکل 5 a توسعه داده شد [ 38 ]. به عنوان ورودی، AuraPRO نیاز به اطلاعاتی در مورد پارامترهای پیوند از شبیه سازی بصری دارد (به بخش 2.4 مراجعه کنید )، مانند مختصات موقعیت منبع و گیرنده، شرایط آب و هوایی، و فایل صوتی انتشار، برای پردازش. اطلاعات توپوگرافی از مدل رقومی ارتفاع به دست آمده است، که همچنین مبنای شبیه سازی بصری بود ( شکل 1 را ببینید). اشیاء اضافی مانند ساختمان ها را می توان در یک فایل متنی جداگانه تعریف کرد. فایل موج صوتی حاوی سیگنال انتشار خوانده شده و به یک فایل موج خروجی پردازش می شود. خروجی عملکرد زمان فشار صدا را در موقعیت گیرنده نشان می دهد. تا کنون، انتشار شامل گسترش هندسی، جذب هوا، تضعیف توسط موانع، تضعیف توسط شاخ و برگ (همه طبق ISO 9613) و اثرات زمینی است.
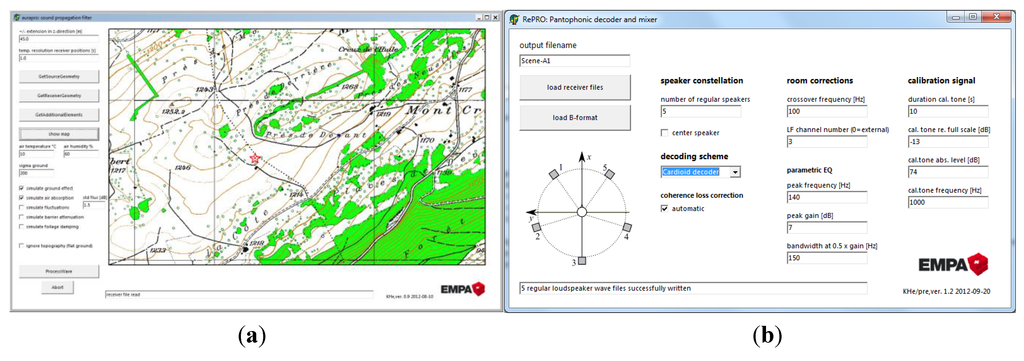
شکل 5. رابط های کاربر گرافیکی برنامه های کامپیوتری ( a ) AuraPRO و ( b ) RePRO.
در مرحله سوم، صدای احتمالی پوشش گیاهی سنتز می شود (3). این مدل هندسه پوشش گیاهی، نوع پوشش گیاهی و سرعت باد را در نظر می گیرد [ 38 ]. نویز پوشش گیاهی بر اساس یک مدل آشفتگی که نوسانات سرعت باد را پیشبینی میکند، در دامنه مدوله میشود. به عنوان یک سادهسازی، این نوسانات سرعت باد مستقل از سلولهای گیاهی منفرد نسبت داده میشوند و به یک میدان سرعت باد وابسته به مکان ارجاع نمیشوند.
شبیه سازی انتشار صدا به گیرنده اجازه می دهد موقعیت را در طول زمان تغییر دهد. بدینوسیله، باید رویهای برای نقشهبرداری نمونههای گسیل بر روی نمونههای گیرنده برای جابجاییهای زمانی دلخواه بدون مصنوعات شنیداری ایجاد شود. این عملیات غیرخطی به درستی اثر داپلر را مدلسازی می کند، یعنی تغییر فرکانس بین سیگنال منتشر شده و دریافتی در صورت حرکت نسبی بین منبع و گیرنده.
مرحله آخر یک نقشه برداری مناسب از سیگنال های سنتز شده به یک سیستم بلندگو (4) را پوشش می دهد تا یک برداشت شنیداری مناسب در مورد سطوح فشار صدا و اطلاعات جهت ایجاد کند. در برنامه ما، یک استراتژی رندر آمبیسونیک انتخاب شد. بدین وسیله، می توان از تعداد دلخواه بلندگو استفاده کرد و استراتژی های مختلف کدگذاری امکان بهینه سازی ویژگی های سیستم مانند دقت محلی سازی و گسترش نقطه شیرین را فراهم می کند. برای نگاشت سیگنال ها به سیستم بلندگو، برنامه کامپیوتری RePRO توسعه داده شد، به شکل 5 ب مراجعه کنید. پنج بلندگو در یک مجموعه پنج ضلعی چیده شده بودند تا حس شنیداری بهینه ایجاد کنند که امکان تعیین مناسب جهت منبع صدا را فراهم می کند.
2.4. پیوند آکوستیک به شبیه سازی بصری
مفهومی برای اتصال خروجی شبیه سازی صوتی به اندازه کافی به مدل چشم انداز سه بعدی توسعه داده شد. از آنجایی که هنوز امکان تولید شبیهسازی صوتی در زمان واقعی وجود ندارد، فایلهای صوتی باید به تجسمها در یک فرآیند پسا پیوند داده شوند. این شامل سه وظیفه است:
-
رندر کردن تصاویر برای یک ویدیو از CryENGINE از یک دیدگاه یا مسیر پیاده روی.
-
ذخیره تمام پارامترهای مربوطه که برای محاسبه صحیح فایل های صوتی ( بخش 2.3 ) مورد نیاز است در یک فایل و ارائه آنها به محاسبات شبیه سازی صوتی.
-
با استفاده از نرم افزار Adobe Premiere Pro [ 59 ] ، تصاویر را به ویدیو تبدیل کنید و فایل های صوتی سنتز شده را به ویدیو پیوند دهید .
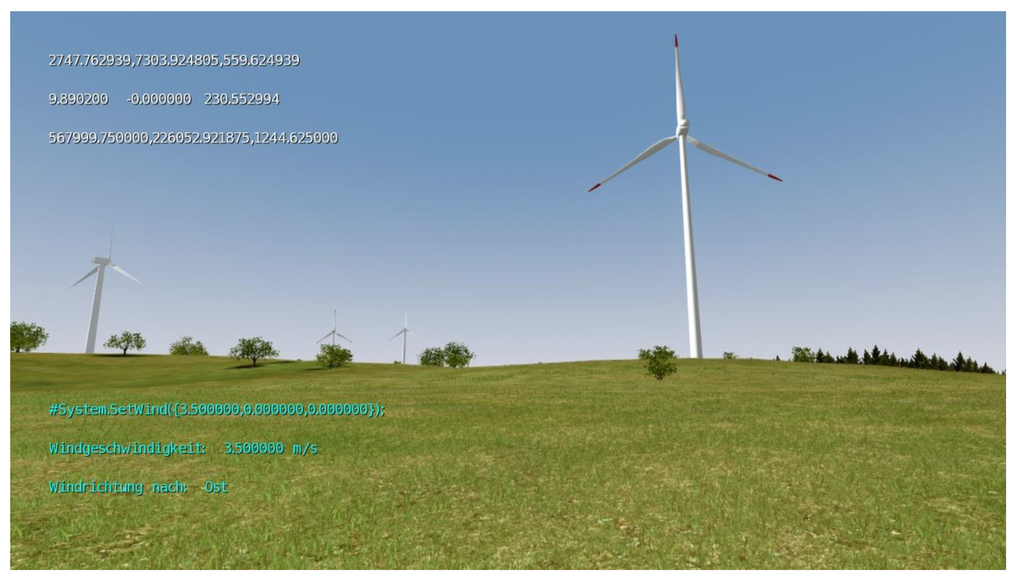
شکل 6. اطلاعات روی صفحه نمایش سرپوش (HUD) از موقعیت فعلی در میدان و زاویه دید (گوشه سمت چپ بالا) و سرعت و جهت باد فعلی (گوشه سمت چپ پایین).
در اولین کار، تصاویر به طور همزمان با حرکت در منظره، با استفاده از یک تابع تصویربرداری در اسکریپت “Flow Graph” CryENGINE ضبط می شوند. در کار دوم، پارامترهای مربوط به هر دو شبیه سازی صوتی و بصری باید همزمان با ضبط تصاویر در یک فایل پارامتر واحد در زمان واقعی پخش شوند (مرحله 2). این پارامترها عبارتند از: موقعیت، زاویه دید، موقعیت توربین بادی، سرعت چرخش توربین، موقعیت روتور اولیه، جهت باد و سرعت باد. Nakevska و همکاران . [ 29] تعاملی با موتور بازی ایجاد کرد که فایلهای XML را تولید میکرد، به عنوان مثال، هر شی یک فرزند با ویژگیهای موقعیت و چرخش است. در مورد ما، پارامترهای مربوطه در نرم افزار تجسم توسط اسکریپت توسعه یافته “Flow Graph” جمع آوری می شوند (به بخش 2.2.2 مراجعه کنید.) و همچنین در یک فایل XML خارجی پخش می شود. رویکرد توسعهیافته امکان دسترسی به این پارامترها را در مدل منظر مجازی فراهم میکند و دادهها را در قالبی مناسب به عنوان ورودی برای مدل شنیداری فراهم میکند. بر اساس این پارامترها می توان شبیه سازی صوتی را محاسبه کرد. در کار سوم، چالش همگام سازی صحیح حرکت توربین بادی متحرک با فایل های صوتی بود. بنابراین، یک تابع در اسکریپت “Flow Graph” توسعه داده شد. ابتدا، مقادیر واقعی پارامترها در یک روکش نشان داده میشوند، بهاصطلاح نمایشگر سر بالا (HUD) برای کنترل تنظیمات پارامترهای مربوطه ( شکل 6 را ببینید ).
سپس، با یک ورودی کلید از پیش تعریف شده در اسکریپت “Flow Graph”، اطلاعات پارامتر HUD را می توان پنهان کرد و یک علامت START به طور همزمان برای 0.3 ثانیه در HUD ظاهر می شود و چرخش توربین های بادی را آغاز می کند. این علامت START زمان شروع شبیه سازی و تولید فایل پارامتر را نشان می دهد. با تولید فیلم های شبیه سازی در Adobe Premiere Pro، فایل های صوتی مربوطه را می توان به درستی بر اساس اطلاعات START بصری در تصویرسازی اعمال کرد.
3. نتایج
با اجرای روش ارائه شده، ما ویدیوهای بصری-آکوستیک مرتبط با مناظر شبیه سازی شده را تولید کردیم. فیلمها برای همه مکانهای مرجع Mont Crosin تولید شدند. شکل 7 سه مکان از پنج مکان مرجع را نشان می دهد، در سمت چپ مکان های مرجع ثبت شده در میدان (به بخش 2.1 مراجعه کنید ) و در سمت راست مکان های شبیه سازی شده مربوطه را نشان می دهد.
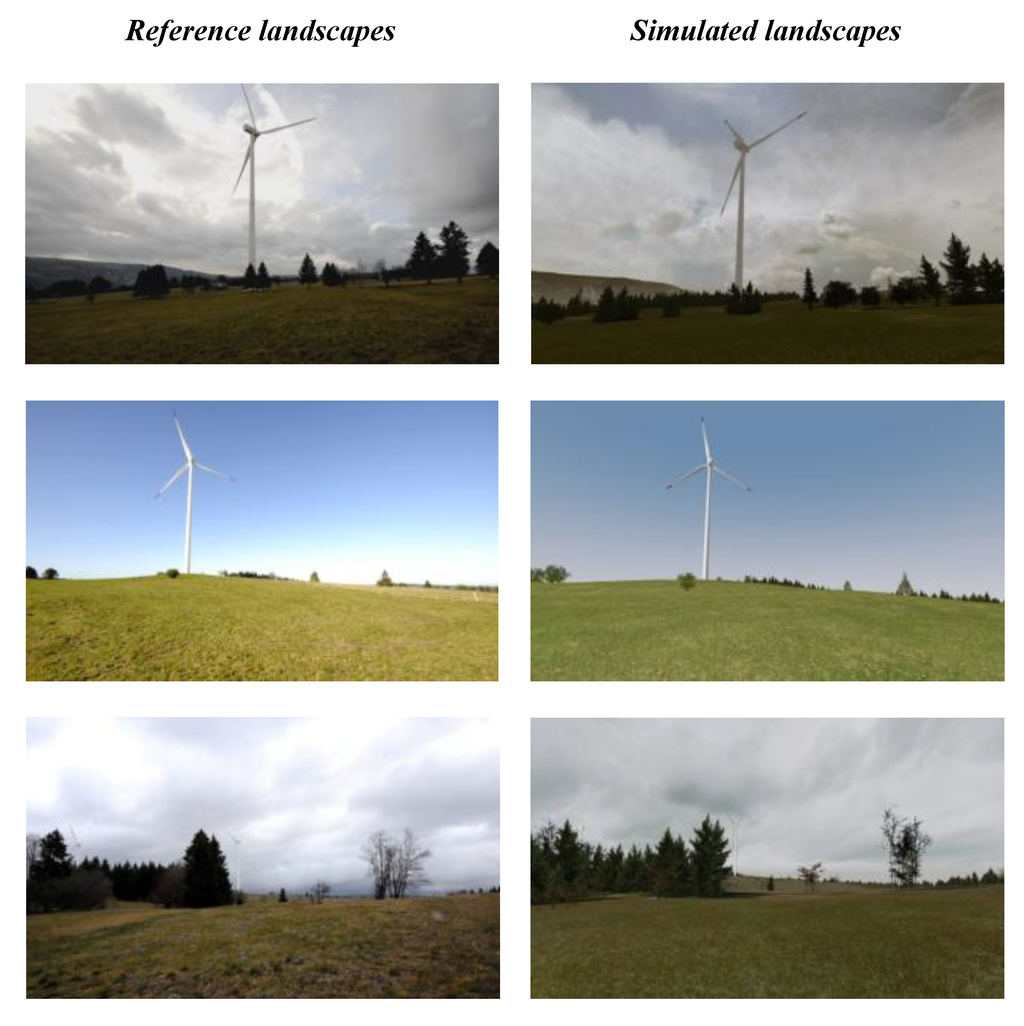
شکل 7. سه مورد از پنج ویدیوی منظره مرجع ( چپ ) و شبیه سازی شده ( راست ).
4. بحث
ما رویکردی برای کار با دادههای GIS در یک موتور بازی، شبیهسازی صحیح نویز توربین بادی و پیوند شبیهسازی نویز به منظره مجازی ارائه کردیم. این روش راه مناسبی را برای تولید نمایشهای منظره دنیای واقعی دقیق و برای پیوند شنیدن به منظره مجازی نشان میدهد.
ما یک مدل منظره مجازی مبتنی بر GIS با استفاده از CryENGINE 3 Crytek تولید کردیم. استفاده از این موتور بازی یک مزیت بزرگ برای شبیهسازی بصری-آکوستیک ارائه میدهد. از آنجایی که CryENGINE Crytek دارای یک موتور فیزیک با کارایی بالا است، امکان ایجاد تجسم با مقادیر زیادی جزئیات، از جمله حرکت پوشش گیاهی، شرایط نور، محاسبه سایه، و تولید ابر سه بعدی وجود داشت. علاوه بر این، “گراف جریان” CryENGINE به فرآیندهای منطقی اسکریپت نویسی به شیوه ای تعاملی اجازه می دهد، که در آن تمام پارامترهای مرتبط برای شبیه سازی های بصری و صوتی را می توان با تعامل کاربر تغییر داد و در زمان واقعی صادر کرد. این ویژگی ها امکان پیوند بین شبیه سازی بصری و صوتی را به روشی مناسب فراهم می کند.
با این حال، از آنجایی که نرمافزار تجسم مستقیماً به یک سیستم اطلاعات جغرافیایی (GIS) متصل نیست، ادغام و نمایش دادههای مکانی به طور دقیق و منسجم در موتور بازی یک وظیفه اصلی بود. بنابراین، تبدیل مناسب یک سیستم مختصات دنیای واقعی به مختصات موتور بازی داخلی بسیار مهم است. مستندات رویکرد ترجمه ساده در این مقاله راهنمایی برای ایجاد تجسمهای سریع و ساده مبتنی بر GIS با CryENGINE ارائه میکند. این ترجمه نه تنها اجازه می دهد تا داده های جغرافیایی و اشیاء سه بعدی مبتنی بر مختصات دنیای واقعی را وارد کنید، بلکه اجازه می دهد تا پارامترهای پیوند مورد نیاز برای شبیه سازی صوتی را نیز به اندازه کافی صادر کنید.
با کمک ابزار توسعهیافته، میتوان آکوستیک طراحی مزرعه بادی دلخواه را به تجسم منظره مبتنی بر GIS در موتور بازی پیوند داد. پارامترهای پیوندی که توسط تنظیمات از پیش تعریف شده تعریف شده اند و با تعامل کاربر در شبیه سازی بصری تغییر می کنند، در یک فایل پارامتر موجود برای محاسبه شنیداری صحیح ذخیره می شوند. طراحی مزرعه بادی را می توان به صورت تعاملی تغییر داد و پس از آن، صدا بر این اساس برای تنظیمات جدید محاسبه می شود. بنابراین کاربر می تواند هر مکانی را در منظر مجازی انتخاب کند و شنیده شدن توربین های بادی را می توان بر اساس پارامترهای واقعی مکان محاسبه کرد.
جنبههای نوآورانه برنامههای کامپیوتری شنیداری توسعهیافته، توسعه الگوریتمها و استراتژیهای جدید برای شبیهسازی صدای صریح فضایی توربینهای بادی با در نظر گرفتن شرایط محیطی است. با این حال، سینت سایزر صوتی هنوز قادر به محاسبه و بازتولید صدا در زمان واقعی نیست. بنابراین، فایل های صوتی باید به صورت آفلاین در یک مرحله پس از پردازش با توجه به فایل پارامتر صادر شده از ماژول تجسم محاسبه شوند. در حال حاضر، اطلاعات صوتی به پنج بلندگو که در یک پنج ضلعی چیده شدهاند ارائه میشود و امکان محلیسازی منبع بهینه با وضوح زاویهای کافی در همه جهات را فراهم میکند. در مرحله بعدی، فایل های صوتی به صورت دستی به ویدیوی منظره مجازی متحرک پیوند داده می شوند. برای جلوگیری از ادغام دستی ویدیو و صدا،
از دیدگاه فنی، یک پیشرفت مهم در نمونه اولیه، توسعه عملکرد بلادرنگ ابزار شبیهسازی است. از آنجایی که امکان تغییر و ذخیره پارامترهای پیوند واقعی در زمان واقعی وجود دارد، باید تحقیقاتی برای تولید و شنیدن آکوستیک همزمان با حرکت کاربر به صورت جداگانه در منظره سه بعدی انجام شود.
به عنوان گام بعدی، این نمونه اولیه از ابزار شبیه سازی بصری باید اعتبار سنجی شود. هم Bishop [ 19 ] و هم Lange [ 8 ] بیان میکنند که پیشرفتهای بیشتر در تکنیکهای تجسم به افراد کمک میکند تا تغییرات چشمانداز آینده را درک کنند و بنابراین بر فرآیند تصمیمگیری تأثیر میگذارند، اما باید در نظر گرفت که چگونه شبیهسازیهای منظر توسط انسان درک میشود. بنابراین، یک اعتبارسنجی مورد نیاز است، جایی که یک ارزیابی مقایسهای انجام میشود و فیلمهای مزرعه بادی شبیهسازیشده را با ویدیوهای مزرعه بادی واقعی مقایسه میکند. سپس ابزار تایید شده می تواند برای ارزیابی های بیشتر سناریوهای مزرعه بادی، به عنوان مثال، در تنظیمات کارگاه مشارکتی به عنوان Bishop [ 19 ] اجرا شود.] پیشنهاد می کند، یا در یک مطالعه قابل قبول، تأثیر طرح های مختلف مزرعه بادی را در زمینه های مختلف چشم انداز ارزیابی کند. به این ترتیب، توسعه توصیههایی برای برنامهریزی مزرعه بادی و بهرهبرداری از مکانهای پذیرفتهشده انرژی بادی میتواند پشتیبانی شود.
5. نتیجه گیری ها
ما یک نمونه اولیه از یک ابزار شبیهسازی بصری-آکوستیک مبتنی بر GIS را توسعه دادیم که برای ارزیابی و بحث در مورد انتخاب مکانها برای توربینهای بادی و تأثیر آنها بر کیفیت چشمانداز درک شده در فرآیندهای مشارکتی مناسب است. CryENGINE 3 موتور بازی به کار گرفته شده Crytek یک برنامه نرم افزاری مناسب ارائه کرده است که هم برای (1) تجسم سه بعدی واقع گرایانه مزارع بادی متحرک با سطح واقع گرایی بالا بر اساس داده های GIS و هم (2) ارائه پارامترهای ورودی برای پیوند شبیه سازی های صوتی صریح فضایی به مکان های دقیق در مدل مجازی. با مستندسازی روش، ما به ایجاد راهنمایی برای تولید چنین شبیهسازیهای بصری-آکوستیک کمک میکنیم. به طور کلی، این نمونه اولیه می تواند به طور قابل توجهی به تقویت مجموعه ابزارهای موجود برای توسعه آگاهانه چشم انداز با مزارع بادی کمک کند. ادغام شبیهسازی صدای فضایی در مناظر مجازی مرتبط میتواند امکان ارزیابی تاثیر بهبود یافته را فراهم کند و بنابراین، ممکن است مبنای تصمیمگیری بهتر و قابل درکتری نسبت به ابزارهای معمولی، مانند نقشههای دسیبل یا فوتومونتاژ فراهم کند.
منابع
- Wolsink، M. اجرای نیروی باد: ماهیت نگرش های عمومی: برابری و انصاف به جای “انگیزه های حیاط خلوت”. تمدید کنید. حفظ کنید. انرژی Rev. 2007 ، 11 ، 1188-1207. [ Google Scholar ] [ CrossRef ]
- دیواین رایت، P. فراتر از NIMBYism: به سوی یک چارچوب یکپارچه برای درک درک عمومی از انرژی باد. انرژی باد 2005 ، 8 ، 125-139. [ Google Scholar ] [ CrossRef ]
- کاول، آر. نیروی باد، چشم انداز و استراتژیک، برنامه ریزی فضایی – ساخت “مکان های قابل قبول” در ولز. سیاست کاربری زمین 2010 ، 27 ، 222-232. [ Google Scholar ]
- Bundesamt für Energie BFE; Bundesamt für Umwelt، Wald und Landschaft BUWAL; Bundesamt für Raumentwicklung ARE. Konzept Windenergie Schweiz—Grundlagen für die Standortwahl von Windparks ; Bundesamt für Energie BFE, Bundesamt für Umwelt, Wald und Landschaft BUWAL, Bundesamt für Raumentwicklung ARE: Bern, Switzerland, 2004. [ Google Scholar ]
- هال، ن. اشورث، پی. دیواین رایت، پ. پذیرش اجتماعی مزارع بادی: تجزیه و تحلیل چهار موضوع رایج در مطالعات موردی استرالیا. سیاست انرژی 2013 ، 58 ، 200-208. [ Google Scholar ] [ CrossRef ]
- پپرمنز، ی. Loots, I. مبارزات مزرعه بادی در میدان های فلاندر: دیدگاه جامعه شناختی. سیاست انرژی 2013 ، 59 ، 321-328. [ Google Scholar ] [ CrossRef ]
- Bundesamt für Energie BFE. Energieforschung. در کد رفتار für Windkraftprojekte, Machbarkeitsstudie—Schlussbericht ; اداره فدرال انرژی سوئیس: برن، سوئیس، 2009. [ Google Scholar ]
- Lange، E. 99 جلد بعد: ما می توانیم تجسم کنیم. حالا چی؟ Landsc. طرح شهری. 2011 ، 100 ، 403-406. [ Google Scholar ] [ CrossRef ]
- شپرد، دی. مک براید، دی. ولش، دی. هیل، ای. دیرکس، ک. ارزیابی تاثیر نویز توربین بادی بر کیفیت زندگی مرتبط با سلامت. Noise Health 2011 ، 13 ، 333-339. [ Google Scholar ] [ CrossRef ]
- Mijuk، G. Der Wind dreh. در NZZ am Sonntag ; Neue Zürcher Zeitung AG: زوریخ، سوئیس، 2010; ص 22-23. [ Google Scholar ]
- پدرسن، ای. Larsman, P. تاثیر عوامل بصری بر مزاحمت صوتی در بین افرادی که در مجاورت توربین های بادی زندگی می کنند. جی. محیط زیست. روانی 2008 ، 28 ، 379-389. [ Google Scholar ] [ CrossRef ]
- Laubwerk GmbH. گیاهان سه بعدی برای هنرمندان CG. در دسترس آنلاین: http://www.laubwerk.com (در 29 اکتبر 2013 قابل دسترسی است).
- Xfrog Inc. درختان سه بعدی و گیاهان سه بعدی برای هنرمندان CG. در دسترس آنلاین: http://xfrog.com (در 29 اکتبر 2013 قابل دسترسی است).
- IDV Inc. SpeedTree متحرک درختان و گیاهان مدل سازی و نرم افزار رندر. در دسترس آنلاین: http://www.speedtree.com (در 29 اکتبر 2013 قابل دسترسی است).
- قدیریان، پ. Bishop، ID ادغام واقعیت افزوده و GIS: رویکردی جدید برای تجسم منظره واقعی. Landsc. طرح شهری. 2008 ، 86 ، 226-232. [ Google Scholar ] [ CrossRef ]
- سهام، C.; Bishop، ID پیوند GIS با تجسم زمان واقعی برای کاوش تغییرات چشم انداز در کارگاه های جامعه روستایی. واقعی مجازی. 2006 ، 9 ، 260-270. [ Google Scholar ] [ CrossRef ]
- سهام، C.; اسقف، شناسه; گرین، آر. بررسی تغییرات چشمانداز با استفاده از یک سیستم تجسم در کارگاههای جامعه روستایی. Landsc. طرح شهری. 2007 ، 79 ، 229-239. [ Google Scholar ] [ CrossRef ]
- سهام، C.; اسقف، شناسه; O’Connor، A. ایجاد محیط های مجازی با پیوند دادن پردازش داده های مکانی با یک موتور بازی. در روندهای تجسم منظره و مشارکت در زمان واقعی ؛ Buhmann, E., Paar, P., Bishop, ID, Lange, E., Eds.; Wichmann: هایدلبرگ، آلمان، 2005; صص 324-329. [ Google Scholar ]
- اسقف، ID برنامه ریزی منظر یک بازی نیست: آیا باید باشد؟ Landsc. طرح شهری. 2011 ، 100 ، 390-392. [ Google Scholar ] [ CrossRef ]
- لانگ، ای. Hehl-Lange، S. ترکیب یک رویکرد برنامه ریزی مشارکتی با یک مدل منظر مجازی برای مکان یابی توربین های بادی. جی. محیط زیست. طرح. مدیریت 2005 ، 48 ، 833-852. [ Google Scholar ] [ CrossRef ]
- اوترو، سی. مانچادو، سی. آریاس، ر. Bruschi، VM; گومز ژاورگی، وی. سنترو، A. توسعه انرژی بادی در کانتابریا، اسپانیا. رویکرد روش شناختی، مسائل زیست محیطی، فناوری و اجتماعی. تمدید کنید. انرژی 2012 ، 40 ، 137-149. [ Google Scholar ] [ CrossRef ]
- Friese, K.-I.; هرلیچ، ام. ولتر، F.-E. استفاده از موتورهای بازی برای تجسم در برنامه های علمی در New Frontiers for Entertainment Computing ; Ciancarini, P., Nakatsu, R., Rauterberg, M., Roccetti, M., Eds. Springer: Boston, MA, USA, 2008; جلد 279، ص 11-22. [ Google Scholar ]
- لوئیس، ام. Jacobson, J. موتورهای بازی در تحقیقات علمی. اشتراک. ACM 2002 ، 45 ، 27-31. [ Google Scholar ]
- هرویگ، ا. Paar, P. Game Engines: Tools for Landscape Visualization and Planning? در روندهای GIS و مجازی سازی در برنامه ریزی و طراحی محیطی ; Buhmann, E., Nothelfer, U., Pietsch, M., Eds.; Wichmann: هایدلبرگ، آلمان، 2002; صص 161-172. [ Google Scholar ]
- ژرمنچیس، تی. پتیت، سی. Cartwright، W. ساخت یک محیط مجازی سه بعدی جغرافیایی بر روی فناوری بازی های رایانه ای. جی. اسپات. علمی 2004 ، 49 ، 89-95. [ Google Scholar ] [ CrossRef ]
- GarageGames. ابزارها و نرم افزارهای توسعه بازی. در دسترس آنلاین: http://www.garagegames.com (در 29 اکتبر 2013 قابل دسترسی است).
- جیکوبسون، جی. Lewis, M. موتور بازی واقعیت مجازی با CaveUT. کامپیوتر 2005 ، 38 ، 79-82. [ Google Scholar ] [ CrossRef ]
- Epic Games Inc. Game Engine Technology توسط Unreal. در دسترس آنلاین: http://www.unrealengine.com (در 29 اکتبر 2013 قابل دسترسی است).
- ناکفسکا، م. ووس، سی. خوارز، آ. هو، جی. لانگریس، جی. Rauterberg، M. استفاده از موتورهای بازی در نصب های واقعیت ترکیبی. در محاسبات سرگرمی-ICEC 2011 ; Anacleto, J., Fels, S., Graham, N., Kapralos, B., Siif El-Nasr, M., Stanley, K., Eds. Springer: برلین/هایدلبرگ، آلمان، 2011; جلد 6972، صص 456–459. [ Google Scholar ]
- Crytek GmbH. MyCryENGINE. در دسترس آنلاین: http://mycryengine.com (در 29 اکتبر 2013 قابل دسترسی است).
- ژرمنچیس، تی. کارترایت، دبلیو. پتیت، سی. استفاده از فناوری بازی های رایانه ای برای کاوش در توانایی های انسان در مسیریابی و ناوبری در محیط ساخته شده. در مجموعه مقالات XXII کنفرانس بین المللی کارتوگرافی، A Coruña، اسپانیا، 9-16 ژوئیه 2005; صص 11-16.
- ژرمنچیس، تی. کارترایت، دبلیو. Pettit, C. Virtual Queenscliff: A Computer Game Approach for Depicting Geography. در کارتوگرافی چند رسانه ای ; Cartwright, W., Peterson, M., Gartner, G., Eds. Springer: برلین/هایدلبرگ، آلمان، 2007; صص 359-368. [ Google Scholar ]
- تریسی، دی. کتاب آشپزی Tracy, S. CryENGINE 3: بیش از 90 دستور العمل نوشته شده توسط توسعه دهندگان Crytek برای ایجاد بازی های زمان واقعی نسل سوم . Packt Publishing Ltd.: Birmingham, UK, 2011. [ Google Scholar ]
- هرلیچ، ام. ابزاری برای معماری منظر بر اساس فناوری بازی های رایانه ای. در مجموعه مقالات هفدهمین کنفرانس بین المللی واقعیت مصنوعی و تداخل، Esbjerg، دانمارک، 28-30 نوامبر 2007; ص 264-268.
- هرلیچ، ام. هول، اچ. Malaka, R. ادغام CityGML و Collada برای تجسم داده های جغرافیایی با کیفیت بالا در رایانه شخصی و Xbox 360. در محاسبات سرگرمی-ICEC 2010 ; Yang, H., Malaka, R., Hoshino, J., Han, J., Eds. Springer: برلین/هایدلبرگ، آلمان، 2010; جلد 6243، ص 270–277. [ Google Scholar ]
- اورلمانز، اس. سیجتسما، پ. Méndez López، B. مکان و کمیت منابع نویز در یک توربین بادی. J. صدا ویب. 2007 ، 299 ، 869-883. [ Google Scholar ] [ CrossRef ]
- Schepers، JG; Curvers، A.; اورلمانز، اس. براون، ک. لوتز، تی. هریگ، ا. وورز، دبلیو. مانتسانز، ع. گارسیلان، ال. فیشر، ام. و همکاران SIROCCO: روتورهای خاموش با بهینه سازی آکوستیک. در مجموعه مقالات دومین نشست بین المللی در مورد نویز توربین های بادی، لیون، فرانسه، 20-21 سپتامبر 2007.
- هوتسچی، ک. پیرن، آر. مولر، ام. مانووکی، ام. ویسن هایک، U. Eggenschwiler، K. شنیدن صدای توربین بادی: فیلتر انتشار و سنتز نویز گیاهی. Acta Acust. یونایتد آکست. 2014 ، 100 ، 13-24. [ Google Scholar ] [ CrossRef ]
- هوتسچی، ک. پیرن، آر. شنوایی توربین های بادی. در مجموعه مقالات کنفرانس AIA-DAGA 2013 در مورد آکوستیک، مرانو، ایتالیا، 18-21 مارس 2013.
- مانووکی، ام. هایک، UW; کلاین، TM; پیرن، آر. هوتسچی، ک. Grêt-Regamey، A. مفهومی برای طراحی مشارکتی مزارع بادی که توسط یک شبیهسازی سه بعدی بصری-آکوستیک مبتنی بر GIS تعاملی تسهیل میشود. در مجموعه مقالات بررسی شده معماری منظر دیجیتال 2012 در دانشگاه علوم کاربردی آنهالت. Buhmann, E., Ervin, S., Pietsch, M., Eds.; Wichmann: هایدلبرگ، آلمان، 2012; صص 297-306. [ Google Scholar ]
- A/S سیستم های بادی Vestas. سیستم های باد وستاس در دسترس آنلاین: http://www.vestas.com (در 29 اکتبر 2013 قابل دسترسی است).
- Vorländer، M. شنیداری : مبانی آکوستیک، مدلسازی، شبیهسازی، الگوریتمها و واقعیت مجازی آکوستیک . Springer: برلین/هایدلبرگ، آلمان، 2008. [ Google Scholar ]
- براون، اس. Ziegler, S. Windlandschaft: Neue Landschaften mit Windenergieanlagen ; Wissenschaftlicher Verlag Berlin (WVB): برلین، آلمان، 2006. [ Google Scholar ]
- اداره فدرال توپوگرافی سوئیستوپو. Swisstopo – دانستن کجا. در دسترس آنلاین: http://www.swisstopo.ch (در 29 اکتبر 2013 قابل دسترسی است).
- تریسی، اس. Reindell, P. CryENGINE 3 توسعه بازی: راهنمای مبتدی ; Packt Publishing Ltd.: Birmingham, UK, 2012. [ Google Scholar ]
- Kühner, D. تضعیف بیش از حد ناشی از تأثیرات هواشناسی و امپدانس زمین. Acta Acust. یونایتد آکست. 1998 ، 84 ، 870-883. [ Google Scholar ]
- Van den Berg، GP آیا توربینهای بادی سطح صدای با فرکانس پایین قابل توجهی تولید میکنند؟ در مجموعه مقالات یازدهمین نشست بین المللی در مورد نویز و لرزش فرکانس پایین و کنترل آن، ماستریخت، هلند، 30 اوت تا 1 سپتامبر 2004. جلد 13، ص 367–376.
- هوتسچی، ک. Eggenschwiler ، K. Lärmermittlung und Massnahmen zur Emissionsbegrenzung bei Windkraftanlagen ; Untersuchungsbericht Nr. 452’460، بین. 562.2432; عید Materialprüfungs- und Forschungsanstalt, Abteilung Akustik: Dübendorf, Switzerland, 2010. [ Google Scholar ]
- داناهی، جی. مجموعه ای از نیازهای داده های تجسم در برنامه ریزی و طراحی محیطی شهری برای داده های فتوگرامتری. در استخراج خودکار اجسام دست ساز از تصاویر هوایی و فضایی (II) ; Gruen, A., Baltsavias, E., Henricsson, O., Eds.; Birkhäuser: بازل، سوئیس، 1997; صص 357-366. [ Google Scholar ]
- Wissen, U. Virtuelle Landschaften zur Partizipativen Planung: Optimierung von 3D-Landschaftsvisualisierungen zur Informationsvermittlung ; vdf Hochschulverlag AG: زوریخ، سوئیس، 2009. [ Google Scholar ]
- Lange، E. مسائل و سوالات برای تحقیق در ارتباط با مردم از طریق تجسم. در روندهای تجسم منظره و مشارکت در زمان واقعی ؛ Buhmann, E., Paar, P., Bishop, ID, Lange, E., Eds.; Wichmann: هایدلبرگ، آلمان، 2005; ص 16-26. [ Google Scholar ]
- پار، پ. شروت، او. لانگ، ای. Wissen، U. Schmid، WA Steckt der Teufel im Detail؟ Eignung Unterschiedlicher Detailgrade von 3D-Landschaftsvisualisierung für Bürgerbeteiligung und Entscheidungsunterstützung. در مجموعه مقالات نهمین کنفرانس بین المللی برنامه ریزی شهری و توسعه منطقه ای در جامعه اطلاعاتی، وین، اتریش، 25-27 فوریه 2004. صص 535-541.
- آکلایتنر، ای. اشمیدینگر، ای. Voigt، A. Dimensionen Eines Digitalen Stadtmodelles am Beispiel Linz. در مجموعه مقالات هشتمین کنفرانس بین المللی برنامه ریزی شهری و توسعه منطقه ای در جامعه اطلاعاتی، وین، اتریش، 25 فوریه تا 1 مارس 2003. صص 171-179.
- اروین، SM مدلسازی و تجسم منظر دیجیتال: یک دستور کار تحقیقاتی. Landsc. طرح شهری. 2001 ، 54 ، 49-62. [ Google Scholar ] [ CrossRef ]
- A/S بین المللی EMD. نرمافزار و شرکت مشاوره دانمارکی به کشورهایی که در برنامهریزی و مستندسازی پروژههای انرژی زیستمحیطی کمک میکنند. در دسترس آنلاین: http://www.emd.dk (در 29 اکتبر 2013 قابل دسترسی است).
- نرم افزار طراحی، مهندسی و سرگرمی سه بعدی Autodesk Inc. در دسترس آنلاین: http://www.autodesk.com (در 29 اکتبر 2013 قابل دسترسی است).
- Crytek GmbH. نصب ابزارهای 3ds Max—Doc 3. راهنمای ایجاد دارایی. در دسترس آنلاین: http://freesdk.crydev.net/display/SDKDOC3/Installing+the+3ds+Max+Tools (در 30 اکتبر 2013 قابل دسترسی است).
- پیرن، آر. هوتسچی، ک. مولر، ام. مانووکی، ام. Eggenschwiler، K. شنیدن صدای توربین بادی: سنتز انتشار. Acta Acust. آکست متحد 2014 ، 100 ، 25-33. [ Google Scholar ] [ CrossRef ]
- Adobe Systems Inc. Adobe Premiere Pro CC. در دسترس آنلاین: http://www.adobe.com/PremierePro (در 29 اکتبر 2013 قابل دسترسی است).
© 2014 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر