

خلاصه
افزایش قیمت و استقرار فناوریهای ردیابی پیشرفته، محققان را از حوزههای مختلف سوق داده است تا مجموعه دادههای حرکت مکانی-زمانی حاصل را با هدف کشف دانش تجزیه و تحلیل کنند. دو رویکرد متفاوت را می توان در تحلیل اجسام متحرک در نظر گرفت: تحلیل کمی و تحلیل کیفی. این تحقیق بر دومی تمرکز دارد و از حساب سیر کیفی (QTC)، نوعی حساب که دادههای کیفی را در مورد اجسام نقطهای متحرک (MPOs) نشان میدهد، استفاده میکند و چارچوبی را برای تجزیه و تحلیل حرکت نسبی چندین MPO ایجاد میکند. یک تکنیک تجسم به نام امضای توالی (SESI) استفاده میشود که به منظور ارزیابی شباهت الگوهای حرکتی نسبی چندین MPO، الگوهای QTC را در یک فضای شطرنجی نمایهشده دوبعدی نقشهبرداری میکند. کاربرد روش پیشنهادی با استفاده از دو مثال عملی از MPOهای تعاملی نشان داده شده است: اتومبیلها در بزرگراه و قسمتهای بدن یک رقصنده سامبا. نتایج نشان میدهد که روش پیشنهادی میتواند به طور موثر برای تجزیه و تحلیل تعاملات MPOهای متعدد در حوزههای مختلف مورد استفاده قرار گیرد.
کلید واژه ها:
اجسام نقطه متحرک (MPO) ; الگوهای حرکتی ؛ حساب سیر کیفی (QTC) ; امضای توالی (SESI) ; تجزیه و تحلیل شباهت
1. معرفی
استقرار روزافزون دستگاههای آگاه از موقعیت مکانی، حجم بیسابقهای از اطلاعات مسیر را به وجود آورده است، که حرکات انواع مختلف اجسام متحرک را مستند میکند، از جمله وسایل نقلیه [ 1 ]، حیوانات [ 2 ]، اسکناس [ 3 ]، ورزشکاران [ 4 ] ، بازدیدکنندگان در رویدادهای جمعی [ 5 ] و گردشگران [ 6 ]. در طول دو دهه گذشته، افزایش در دسترس بودن و مقرون به صرفه بودن این مجموعه داده ها، علاقه فزاینده ای را در میان دانشمندان اطلاعات (جغرافیایی) برانگیخته است، که به طور پیوسته شروع به توسعه و پیاده سازی ابزارهایی برای کشف، تجمیع و خوشه بندی الگوهای معنادار رفتار فردی یا گروهی کرده اند. فضا-زمان (به عنوان مثال، [ 7 ،8 ، 9 ، 10 ، 11 ، 12 ، 13 ]). یکی از حوزههای خاص مورد علاقه، به خط تحقیقی مربوط میشود که فرمالیسمهای کیفی برای استدلال در مورد اجسام متحرک ایجاد کرده است. اتخاذ یک رویکرد کیفی نشان میدهد که اطلاعات پیوسته توسط نشانههایی که فواصل باز همسایه را به فضاهای کمیت گسسته طبقهبندی میکنند، گسسته میشوند [ 14 ]. کلید این رویکرد این است که تمایز تنها در صورتی معرفی می شود که به زمینه تحقیق در دست مرتبط باشد [ 15 ، 16 ]]. انگیزه توسعه فرمالیسم های کیفی این است که اطلاعات کیفی بهتر از اطلاعات کمی با شهود، ارتباطات و تصمیم گیری انسان همسو می شود [ 17 و 18 ]. بسیاری از کارها در زمینه استدلال کیفی بر ابعاد مکانی یا زمانی اشیاء یا پدیدهها متمرکز است و با این حال، تنها چند مطالعه به طور سیستماتیک ویژگیهای کیفی اطلاعات مکانی-زمانی را بررسی کردهاند (به عنوان مثال، [ 19 ، 20 ]). ). یکی از این مطالعات شامل محاسبه مسیر کیفی (QTC) است که توسط Van de Weghe (2004) [ 21 ] پیشنهاد شده است.]. QTC یک فرمالیسم قدرتمند برای نمایش و استدلال در مورد تعاملات بین دو جسم نقطه متحرک (MPOs) است. در QTC، فعل و انفعالات به عنوان تغییرات در فاصله اقلیدسی بین دو MPO در نظر گرفته می شود. در حالی که QTC روشنگر، تا همین اواخر، عمدتاً مفهومی باقی مانده بود، و روشهای جدید برای استنباط دانش معنادار از اطلاعات کیفی مکانی-زمانی به شدت مورد نیاز هستند [ 22 ، 23 ].
از این رو، این مطالعه به دنبال گسترش دستاوردهای قبلی در این زمینه با توسعه یک روش جدید برای مقایسه حرکات نسبی MPOها بر اساس دنبالههای متناظر (تکراری) روابط کیفی بین MPOها است. تمرکز ما روی خوشهبندی جفتهای مسیر است. مسیر حرکت اجسام متحرک را تعریف میکند و در نتیجه، خوشهبندی جفتهای مسیر به شناسایی گروههایی از جفتهای MPO با رفتار حرکتی نسبی مشابه کمک میکند.
خوشه بندی مسیر در درجه اول به کاربرد وابسته است. تاکنون تلاش های زیادی در زمینه خوشه بندی مسیر انجام شده است. کیسیلویچ و همکاران (2010) رویکردهای خوشهبندی مسیر را به یکی از گروههای زیر [ 24 ] دستهبندی کردهاند: خوشهبندی مبتنی بر مدل توصیفی و مولد (به عنوان مثال، [ 25 ، 26 ]، خوشهبندی مبتنی بر فاصله (مثلا [ 27 ])، خوشهبندی مبتنی بر چگالی. (به عنوان مثال، [ 27 ])، خوشه بندی با کمک بصری (مثلا، [ 28 ])، خوشه بندی خرد (مثلا، [ 29 ])، گله ها و کاروان (به عنوان مثال، [ 30 ])، مکان های مهم برای کاربران مانند محل کار (مثلاً ، [ 31])، و خوشه بندی مبتنی بر الگو (به عنوان مثال، [ 32 ]). رویکرد ارائه شده در اینجا را می توان به خوشه بندی مبتنی بر الگو طبقه بندی کرد. الگوهایی که از مسیرها استخراج می شوند، به عنوان الگوهای مسیر نامیده می شوند و رفتارهای جالبی از اجسام متحرک فردی یا چندگانه را بیان می کنند [ 33 ]. رویکردهای متفاوتی در استخراج الگوهای مسیر وجود دارد (به عنوان مثال، [ 32 ، 34 ، 35 ]). ما از QTC برای استخراج الگوهای حرکتی نسبی جفتهای MPO برای اهداف خوشهبندی استفاده میکنیم. علاوه بر این، یک رویکرد بصری برای شناسایی الگوهای استخراج شده و برای تسهیل درک ماهیت الگوهای حرکتی نسبی که رخ میدهند، اعمال میشود.
سهم اصلی این مطالعه سه جانبه است. ابتدا، نقش دادههای کیفی را در دادهکاوی مکانی-زمانی و کشف دانش از دادههای حرکتی بررسی میکنیم. دوم، ما یک اندازهگیری فاصله برای خوشهبندی جفتهای مسیر MPOها پیشنهاد میکنیم. اگرچه این یک مشکل داده کاوی مکانی-زمانی مهم با کاربردهای گسترده است، تنها توجه محدودی به آن شده است. بسیاری از تکنیکهای داده کاوی مسیری که قبلاً توسعه داده شده بودند با اهداف خوشهبندی، حرکات نسبی MPOها را در نظر نمیگیرند. سوم، ما تکنیکی را برای تجسم، نمایه سازی و مقایسه الگوهای حرکتی نسبی که از تعاملات بین MPOها حاصل می شود، توسعه می دهیم.
بقیه این مطالعه به شرح زیر سازماندهی شده است. در بخش بعدی، به طور مختصر درباره کارهای مرتبط بحث می کنیم، در حالی که در بخش 3 ، روش پیشنهادی را معرفی می کنیم. این بخش به سه بخش فرعی تقسیم می شود که با سه مرحله اصلی روش مطابقت دارد: (1) شرح الگوهای حرکتی نسبی با استفاده از QTC ( بخش 3.1 )، (ب) نمایش الگوهای حرکتی نسبی در یک SESI ( بخش 3.2 ). و (iii) خوشهبندی جفتهای مسیر بر اساس الگوهای حرکتی نسبی آنها ( بخش 3.3 ). سپس بخش 4 سودمندی روش شناسی ما را در شناسایی و خوشه بندی الگوهای حرکتی نسبی ماشین ها و اعضای بدن یک رقصنده سامبا نشان می دهد.بخش 5 بحث مفصلی را ارائه می دهد. در نهایت، بخش 6 یافتههای اصلی را خلاصه و منعکس میکند و راههایی را برای تحقیقات آینده مشخص میکند.
2. آثار مرتبط
تمرکز این مقاله بر روی توسعه روشی برای حمایت از درک ما از الگوهای حرکت نسبی MPO است. از این رو، سه موضوع اصلی در این بخش پوشش داده شده است: (1) روابط بین MPOها (2) تجسم MPOها، و (iii) جنبش های خوشه بندی.
2.1. روابط بین MPOها
الگوهای حرکتی را می توان از حرکت یک شی منفرد در طول زمان و یا از تعامل بین دو یا چند جسم متحرک در یک بازه زمانی حرکت به دست آورد. یک طبقهبندی جامع از الگوها در دادههای حرکت، که برای همه انواع رایج اجسام متحرک قابل استفاده است توسط دوج [ 10 ] ارائه شده است. بدیهی است که الگوهای حرکتی یک فرد منزوی می تواند با الگوهای حرکتی فردی که بخشی از یک گروه است متفاوت باشد. این تفاوت ها بین رفتار حرکتی فردی و گروهی به طور گسترده مورد بحث قرار گرفته است [ 36 ].
تحقیق ما به دنبال کمک به اکتشاف تعاملات چند MPO است. ایده کلیدی این است که الگوهای حرکتی نسبی اجسام متعدد در فضا و زمان را بررسی کنیم. ما به جای نگاه کردن به حرکت افراد در طول زمان، تعامل بین جفتهای MPO را بررسی میکنیم و سپس، رفتار جمعی چندین اشیاء را استنباط میکنیم. علاوه بر این، این مقاله تغییرات در ویژگی های حرکت MPO ها ( به عنوان مثال ، تغییر در سرعت یا آزیموت حرکت در مکان و زمان) را بررسی نمی کند. در عوض، ما بررسی می کنیم که چگونه تغییرات نسبی در فاصله اقلیدسی بین MPO ها می تواند الگوهای حرکت نسبی را نشان دهد.
2.2. تجسم MPO ها
نمایش بصری به عنوان یک تکنیک موثر برای نمایش و پشتیبانی از تجزیه و تحلیل الگوهای حرکتی اشیا استفاده می شود. حجم وسیعی از تحقیقات برای بیان اهمیت تجسم در درک حرکات در حوزه های مختلف انجام شده است (به عنوان مثال، [ 36 ، 37 ، 38 ، 39 ، 40 ، 41 ]). تشخیص، درک و تجسم الگوهای حرکتی به کاربردهای خاصی محدود نمی شود. به عنوان مثال، در یک مطالعه قبلی [ 42 ]، تکنیکی برای شناسایی، تجسم و تفسیر الگوهای حرکتی تکراری در گروههای اجسام نقطه متحرک بر اساس اطلاعات QTC مورد مطالعه قرار گرفته است.
2.3. خوشه بندی جنبش ها
در طول دهه گذشته، بسیاری از مطالعات به مسائل مربوط به کشف دانش و داده کاوی مربوط به داده های شی متحرک پرداخته اند. در میان آنها، برخی به خوشه بندی اشیاء متحرک کمک کردند (به عنوان مثال، [ 27 ، 28 ، 29 ، 30 ، 31 ، 32 ، 33 ، 34 ، 35 ، 36 ، 37 ، 38 ، 39 ، 40 ، 41 ، استخراج از])، الگوهای حرکتی (به عنوان مثال، [ 34 ، 38 ، 43 ، 44 ، 45]) و کاوش شباهت اجسام متحرک (به عنوان مثال، [ 41 ، 46 ، 47 ، 48 ، 49 ]). ایده پشت رویکرد ارائه شده در این مقاله کمک به هر سه کلاس کشف دانش است، یعنیالگوهای استخراج، ارزیابی شباهت و خوشه بندی. علاوه بر تشخیص و تجسم الگوهای حرکتی نسبی، شباهت رفتار حرکتی نسبی اجسام متحرک را اندازهگیری میکنیم. کار ما در نظر دارد شباهتهای الگوهای حرکتی نسبی را با استفاده از تکنیک تجسم به نام SESI کشف کند. از SESI های متعدد، علاوه بر به دست آوردن یک خلاصه بصری از الگوهای حرکت نسبی MPO ها، می توانیم فاصله بین الگوهای حرکت نسبی را اندازه گیری کنیم. اندازهگیری منجر به خوشهبندی جفتهای مسیر میشود، که شناسایی گروههایی از جفتهای مسیر مشابه است.
3. روش شناسی
بر اساس مفاهیم کشف دانش جغرافیایی (GKD) [ 50 ] برای استخراج اطلاعات معنادار، کشف الگوهای جالب، و تفسیر آنها به روشی قابل قبول، ما تکنیکی را برای تجزیه و تحلیل حرکات نسبی MPOهای چندگانه با استفاده از QTC پیشنهاد میکنیم. تا کنون، تعدادی محاسبات کیفی برای استدلال در مورد اجسام متحرک توسعه یافته اند (به عنوان مثال، [ 51 ]). در این مقاله، ما بر سودمندی QTC در شناسایی الگوهای حرکتی نسبی جفتهای MPO تمرکز میکنیم. یک تکنیک تجسم نوآورانه به نام امضای توالی (SESI) برای تغییر الگوهای حرکت QTC MPOها استفاده می شود (به عنوان مثالالگوهای حرکتی نسبی که بر اساس QTC شکل گرفته اند) به ساختاری تبدیل می شوند که برای تجزیه و تحلیل از طریق تکنیک های سنتی داده کاوی مانند الگوریتم های خوشه بندی مناسب است. با استفاده از اندازهگیری فاصله بین دو SESI، میتوانیم شباهت حرکات MPO را کمی کنیم.
روش شناسی شامل سه مرحله اصلی است. اول، دادههای خط سیر خام که از فناوریهای آگاه از مکان ناشی میشوند، به روابط کیفی بر اساس فاصله اقلیدسی بین دو MPO در حال تعامل تبدیل میشوند. دوم، با استفاده از مفهوم یک سیستم عملکرد تکراری، دنبالهای از این روابط کیفی ( به عنوان مثال ، الگوهای حرکتی نسبی) به صورت بصری در یک امضای توالی (SESI) خلاصه میشوند. در نهایت، چندین SESI با استفاده از یک اندازهگیری فاصله مقایسه میشوند، که به نوبه خود برای شناسایی خوشههای سلسله مراتبی از جفتهای مجزای کیفی از مسیرها استفاده میشود. هر یک از این مراحل در زیر به طور عمیق مورد بحث قرار گرفته است.
3.1. مرحله 1: تبدیل داده های سیر خام به روابط کیفی
برای خلاصه کردن داده های خط سیر خام بر حسب روابط کیفی، از محاسبه مسیر کیفی (QTC) [ 21 ] استفاده می کنیم. در سال های اخیر، سه نوع QTC توسعه یافته است: QTC-Basic (QTC B ) [ 52 ]، QTC-Double Cross (QTC C ) [ 53 ]، و QTC برای شبکه ها (QTC N ) [ 54 ]. دو نوع اول MPOها را در فضای اقلیدسی دو بعدی نشان میدهند، در حالی که دومی برای توصیف پدیدههای محدود به شبکه استفاده میشود. در این مطالعه، ما بر روی QTC B تمرکز می کنیم زیرا ساده ترین نوع است که همه انواع دیگر از آن مشتق شده اند. QTC Bیک نمایش کیفی از حرکت دو بعدی یک جفت MPO ارائه می دهد. روابط دودویی بین دو MPO بر اساس فاصله اقلیدسی [ 21 ] ارزیابی می شود. در QTC B ، یک رابطه کیفی بین یک شی اول k و یک شی دوم l در مهر زمانی t توسط برچسبی که از دو کاراکتر تشکیل شده است تعریف می شود. این برچسب نشان دهنده دو رابطه زیر است [ 21 ، 55 ]:
| فرض کنید: MPOs k و l ، و زمان t |
| k | t نشان دهنده موقعیت k در t است |
| l | t نشان دهنده موقعیت l در t است |
| d ( u,v ) نشان دهنده فاصله اقلیدسی بین دو موقعیت u و v است |
| t 1 < t 2 نشان می دهد که t 1 به طور موقت قبل از t 2 است |
- الف _
-
حرکت k نسبت به l در t (محدودیت فاصله):
-
− : k به سمت l حرکت می کند :∃تی1(تی1≺ t ∧ ∀تی–(تی1≺تی–≺ t → د( k |تی–، l | t)>د( k | t , l | t ) ) )∧∃تی2( t ≺تی2∧ ∀تی+( t ≺تی+≺تی2→ د( k | t , l | t ) > د( k |تی+، l | ت)))∃تی1(تی1≺تی∧∀تی–(تی1≺تی–≺تی→د(ک|تی–،ل|تی)>د(ک|تی،ل|تی)))∧∃تی2(تی≺تی2∧∀تی+(تی≺تی+≺تی2→د(ک|تی،ل|تی)>د(ک|تی+،ل|تی)))
-
+: k در حال دور شدن از l است :∃تی1(تی1≺ t ∧ ∀تی–(تی1≺تی–≺ t → د( k |تی–، l | t)<د( k | t , l | t ) ) )∧∃تی2( t ≺تی2∧ ∀تی+( t ≺تی+≺تی2→ د( k | t , l | t ) < د( k |تی+، l | ت)))∃تی1(تی1≺تی∧∀تی–(تی1≺تی–≺تی→د(ک|تی–،ل|تی)<د(ک|تی،ل|تی)))∧∃تی2(تی≺تی2∧∀تی+(تی≺تی+≺تی2→د(ک|تی،ل|تی)<د(ک|تی+،ل|تی)))
-
0: k نسبت به l پایدار است (همه موارد دیگر)
-
- ب _
-
حرکت l نسبت به k در t (محدودیت فاصله) را می توان در A با k و l مبادله توصیف کرد و از این رو:−: l به سمت k حرکت می کند+: l در حال دور شدن از k است
-
0: l نسبت به k پایدار است (همه موارد دیگر)
-
بنابراین، نحو حاصل برای QTC B ، تاپل ( AB ) است که محدودیتهای فاصلهای که در بالا توضیح داده شد (روابط A و B ) را در نظر میگیرد. در مجموع، این رویکرد 9 (3 2 ) رابطه پایه را به دست می دهد که در شکل 1 نشان داده شده است. در هر یک از 9 موردی که در این شکل نشان داده شده است، k در سمت چپ نشان داده شده است و lدر سمت راست نشان داده شده است. بخش های خط چین و هلال ها مناطق حرکت بالقوه را مشخص می کنند. نقطه ها فقط در صورتی می توانند ثابت باشند که یک نقطه پر شود. نه رابطه نشان داده شده مجموعه ای از روابط پایه مشترک جامع و جفتی را تشکیل می دهند. به این معنی که هر دو بازه دقیقاً در یکی از این روابط در کنار یکدیگر قرار دارند [ 56 ]. در نتیجه، در هر لحظه زمانی، یک و تنها یک رابطه QTB B برای هر جفت MPO وجود دارد.
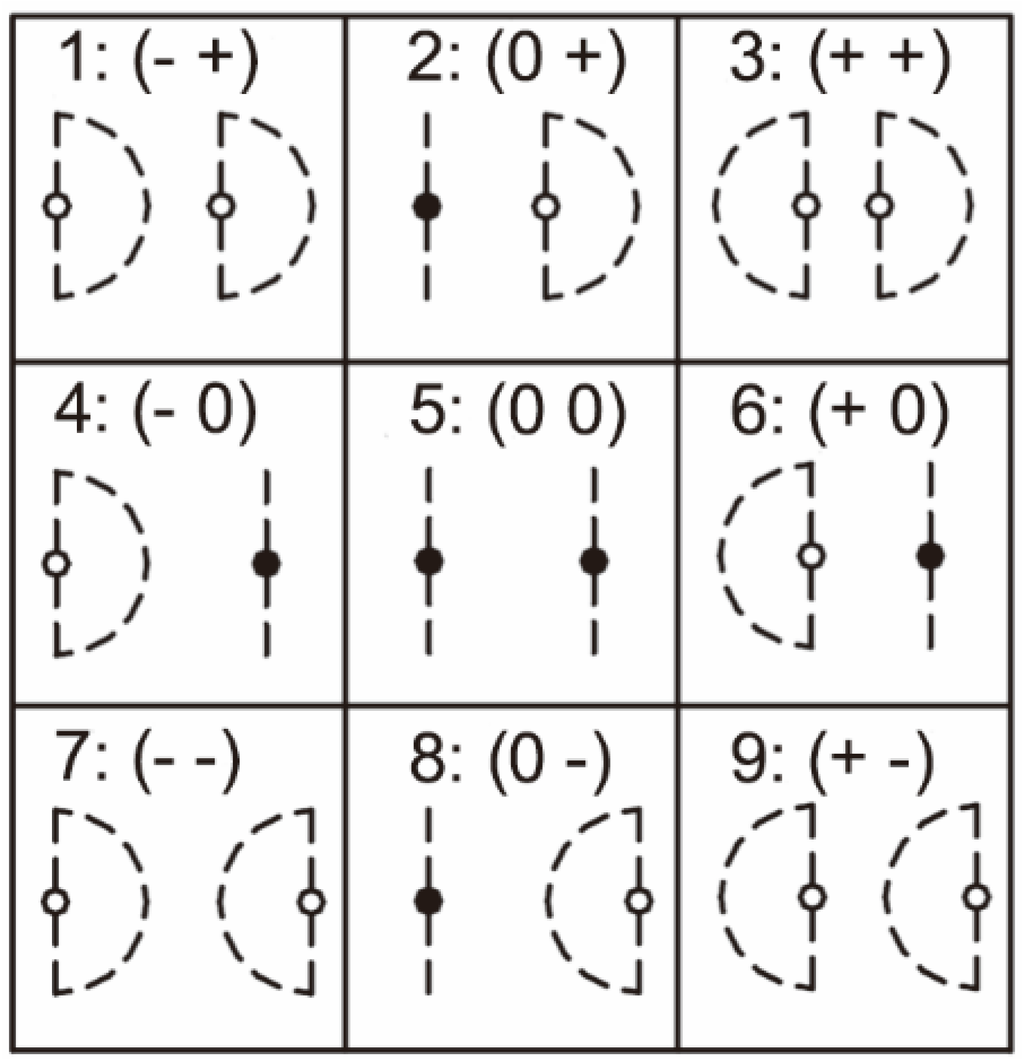
شکل 1. نمادهای QTC B در 2 بعدی [ 21 ].
برای روشن کردن این استراتژی، به عنوان مثال، روابط QTC B( 0 + ) , ( 0 − ) , ( + 0 ) (0+)، (0–)، (+ 0)، و ( – 0 )(– 0)به شرح زیر توضیح داده شده است.
-
( 0 + ) ،(0+)،: k نسبت به l پایدار است و l در حال دور شدن از k است
-
( 0 − )(0–): k نسبت به l پایدار است و l به سمت k حرکت می کند
-
( + 0 )(+ 0): k از l دور می شود و l نسبت به k پایدار است
-
( – 0 )(– 0): k به سمت l حرکت می کند و l نسبت به k پایدار است
یک نمونه اولیه از تعامل بین اجسام متحرک، رویداد سبقت است (همچنین به [ 53 ] مراجعه کنید). فعل و انفعالات بین دو وسیله نقلیه k و l را در یک بازه زمانی در نظر بگیرید. حرکات این وسایل نقلیه را می توان با یک انیمیشن مفهومی، به عبارت دیگر، یک توالی زمانی از انتقال مداوم بین روابط QTC B بیان کرد. فرض کنید که ماشین k قرار است از ماشین l سبقت بگیرد . این تعامل را می توان بر حسب روابط QTC B به صورت زیر بیان کرد. ویدئوی رویداد سبقت به عنوان اطلاعات تکمیلی موجود است .
- ایالت 1.
-
ماشین k و ماشین l هر دو در یک خط ترافیک رانندگی می کنند و k پشت l رانندگی می کند : ( − + )(– +)
- ایالت 2.
-
ماشین k در حال حرکت به سمت خط دوم است: ( − + )(– +)
- ایالت 3.
-
ماشین k در لاین دوم رانندگی می کند و پشت l در حال رانندگی است که در لاین اول رانندگی می کند: ( − + )(– +)( شکل 2 را ببینید ).
- ایالت 4.
-
ماشین k در لاین دوم رانندگی می کند و از جلوی ماشین l که در لاین اول رانندگی می کند، رانندگی می کند: ( + − )(+ –)
- ایالت 5.
-
ماشین k در حال بازگشت به خط اول است: ( + − )(+ –)
- ایالت 6.
-
ماشین k و ماشین l هر دو در اولین لاین رانندگی می کنند و l پشت سر k رانندگی می کند : ( + − )(+ –)
خاطرنشان می شود که به دنبال نظریه تسلط گالتون (2001) [ 57 ] و قانون تغییر برابری فوربوس (1984) [ 58 ]، تغییر مستقیم از – به + و بالعکس غیرممکن است، زیرا چنین تغییری باید از نظر کیفی عبور کند. مقدار 0. این مقدار شاخص 0 فقط برای یک لحظه باید حفظ شود. بنابراین، باید رابطه دیگری بین دولت 3 و 4 وجود داشته باشد، یعنی ( 0 0 )(0 0)(همچنین به [ 59 ] مراجعه کنید). در نهایت، رویداد سبقت فوق با الگوی حرکتی زیر نشان داده می شود:
{ ( − + ) → ( 0 0 ) → ( + − ) }{(– +)→(0 0)→(+ –)}
ما از نمونه اولیه پیاده سازی قبلی خود به نام QTCAnalyzt [ 23 ] برای شناسایی الگوهای حرکت QTC B MPOها استفاده می کنیم. در بخش فرعی بعدی روشی برای تبدیل این الگوها به یک نمایش مبتنی بر فراکتال ارائه میشود.

شکل 2. SESI های طول های 1 و 2.
3.2. مرحله 2: خلاصه کردن الگوهای حرکت QTC B در یک امضای توالی
امضای توالی (SESI) یک روش فراکتالی برای نگاشت الگوهای تعامل بین دو MPO در یک فضای شطرنجی نمایه شده است. همانطور که در بارنزلی (1988) [ 59 ] به تفصیل مورد بحث قرار گرفت، بر اساس یک سیستم تابع تکرار شده است . در یک SESI، هر دنباله از n رابطه کیفی متوالی با یک سلول به طول n نشان داده می شود ( یعنی تعداد روابط QTC B بعدی که یک الگوی حرکتی را تشکیل می دهند). بنابراین، یک SESI به طول 1 نشان دهنده الگوهای حرکتی است که از یک رابطه QTC B تشکیل شده است، در حالی که، برای مثال، یک SESI با طول 5 نشان دهنده الگوهای حرکتی است که از پنج QTC B متوالی تشکیل شده است.روابط وضوح این سلول ها به طول آن SESI بستگی دارد.
شکل 2 SESI های طول های 1 و 2 را نشان می دهد. SESI طول 1 روابط 9 پایه QTC B را نشان می دهد . برای طولهای بالاتر، هر سلول بیشتر به 9 سلول تقسیم میشود و به هر سلول در یک SESI به طول n اجازه میدهد با یک دنباله منحصر به فرد از n رابطه QTC B کیفی مطابقت داشته باشد. به این ترتیب، هر دنباله از روابط QTC B دارای یک مکان خاص در SESI است. به عنوان مثال، سلول های برجسته در SESI با طول های 1 و 2 در شکل 2 ، الگوهای حرکتی را نشان می دهند. { ( − + ) }{(– +)}و { ( − + ) → ( 0 0 ) }{(– +)→(0 0)}از سبقت شرح داده شده در بالا، به ترتیب. در QTC B یک SESI به طول n شامل 9 n سلول است.
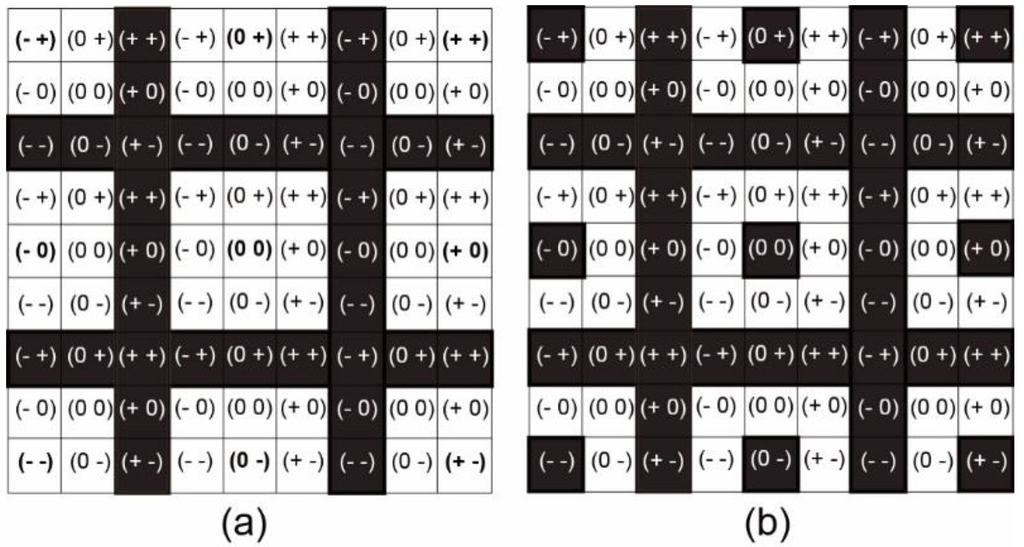
با این حال، همه توالی روابط QTC B ممکن یا قابل توجه نیستند. اول، بر اساس قوانین تداوم (به بخش 3.1 مراجعه کنید )، میتوانیم ترکیبات غیرممکن زمانی روابط QTC B را در SESI با طول 2 یا بیشتر حذف کنیم. شکل 3 a SESI های طول 2 را پس از اعمال محدودیت پیوستگی نشان می دهد.
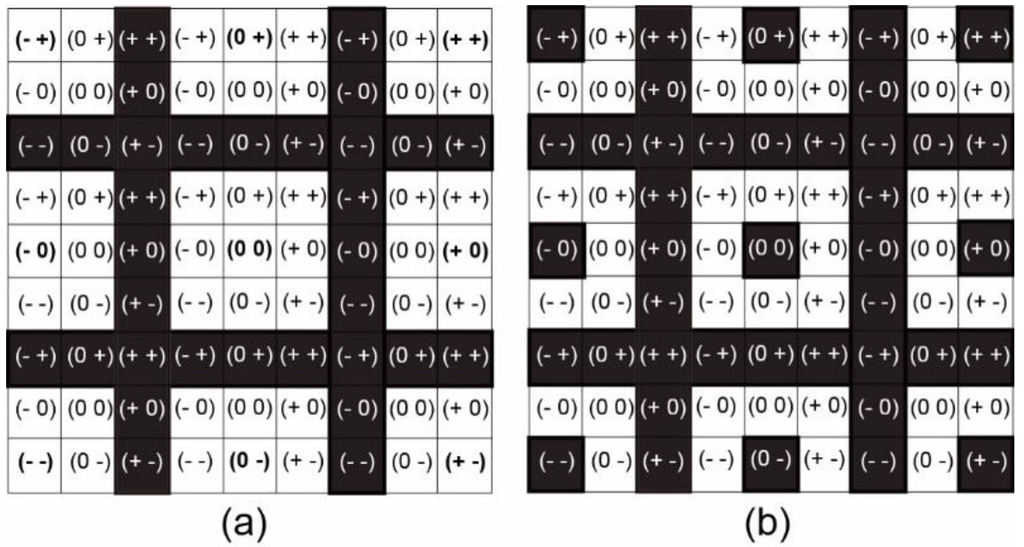
شکل 3. ( الف ) تداوم و ( ب ) محدودیتهای مبتنی بر رویداد که بر یک SESI به طول 2 تحمیل شدهاند.
سلول های سیاه نشان دهنده توالی های ناپیوسته (و در نتیجه غیرممکن) از روابط کیفی بین دو MPO هستند. مثلاً امکان انتقال مستقیم از وجود ندارد ( − + )(– +)به روابط ( + + ) , ( + 0 ) , ( + − ) , ( 0 − ) (+ +)، (+ 0)، (+ –)، (0 –)، و ( — ) _(– –). دوم، چون ما معمولاً به تغییرات در حرکت نسبی بین MPOها در طول زمان علاقه مندیم (به عنوان مثال ، رویدادها)، برخی از توالی روابط کیفی مهم نیستند. این ترتیب زمانی است که یک رابطه QTC B در طول زمان تغییر نمی کند. به عنوان مثال، انتقال از ( − + )(– +)به خودی خود از منظر کیفی چندان معنادار نیست. شکل 3 b نتیجه اعمال هر دو محدودیت فوق را بر روی SESI به طول دو نشان می دهد. برای اهداف تشریحی، ما همچنین نمایش های SESI با طول های 1 تا 3 را در شکل 4 a به همراه نمایش SESI رویداد سبقت ارائه شده در معادله (5) ارائه می دهیم ( شکل 4 ب). رویکرد فراکتالی که در بالا به آن اشاره شد، راه روشنگری برای پرداختن به الگوهای حرکتی تکراری با هر طولی ارائه می دهد.

شکل 4. ( الف ) SESI های طول های 1 تا 3 و ( ب ) رویداد سبقت نگاشت شده روی SESI به طول 3.
3.3. مرحله 3: خوشه بندی جفت های مسیر بر اساس الگوهای حرکتی نسبی آنها.
برای خوشهبندی جفتهای مسیر MPOها بر اساس حرکات نسبی آنها، به تابعی نیاز داریم که بیان کند تا چه حد دو SESI متفاوت هستند. برای این منظور، بیشتر تکنیک های خوشه بندی از اندازه گیری فاصله استفاده می کنند [ 60 ]. در اینجا، ما از یک اندازه گیری فاصله با در نظر گرفتن ساختار SESIs استفاده کردیم. به طور خاص، فاصله دn(اس1،اس2) د�(اس1،اس2) بین دو SESI S 1 و S 2 به طول n به صورت زیر تعریف می شود:
دn(اس1،اس2) =∑3ni ، j = 1(اس1 ،نمن ج–اس2 ،نمن ج)232 * n–αnد�(اس1،اس2)=∑من،�=13�(اس1،نمن�–اس2،نمن�)232*�–��
جایی که
اس1 ،نمن ج=اس1 ، من jUمن ج/ و اس2 ،نمن ج=اس2 ، من جUمن ج/اس1،نمن�=اس1،من��من� و اس2،نمن�=اس2،من��من�
فرکانس های نرمال شده S 1، ij و S 2، ij از الگوهای حرکتی نقشه برداری QTCB را به ترتیب در سلول ij ام S 1 و S 2 نشان دهید. αn��تعداد سلول های غیرممکن یا ناچیز را در یک SESI به طول n نشان می دهد . و U ij نشان دهنده مقدار بالاترین فرکانس سلول ij در بین تمام SESI هایی است که اندازه گیری فاصله روی آنها اعمال می شود.
نرمال سازی برای مقیاس فرکانس های ناهمگن QTC B استفاده می شودالگوهای حرکتی، تا امکان مقایسه آنها وجود داشته باشد. در نتیجه، فرکانس نرمال شده هر سلول یک SESI به بازه [0، 1] محدود می شود. برای محاسبه فاصله بین دو SESI، از سلول های سمت چپ بالا در هر دو SESI شروع می کنیم تا فرکانس های نرمال شده آنها را از یکدیگر کم کنیم. اندازه گیری فاصله در معادله (6) روی تمام سلول های SESI ها اجرا می شود. مخرج در معادله (6) تعداد توالی های امکان پذیر روابط QTC را در آن SESI نشان می دهد. طبق تعریف، توالیهای غیرممکن دارای فرکانس 0 هستند. برای مثال، 529 سلول غیرممکن در یک SESI به طول 3 وجود دارد. تابع فاصله در معادله (6) از 0 تا 1 متغیر است، جایی که 0 نشان میدهد که SESIها یکسان هستند و 1 نشان می دهد که اصلاً بین SESI ها مطابقت وجود ندارد. در واقع، d nشاخصی است که نشان می دهد تا چه حد الگوهای حرکت QTC یک جفت MPO (با طول n ) با الگوهای حرکت QTC B یک جفت دیگر متفاوت است. به عنوان یک تصویر، شکل 5 دو جفت مسیر دلخواه از دو جسم را در دو بازه زمانی مختلف نشان می دهد. SESIهای طول 3 برای هر دو جفت مسیر در شکل 6 نشان داده شده است. سلولهای سیاه نشاندهنده سلولهای غیرممکن هستند، در حالی که سلولهای سبز فرکانس الگوهای حرکتی را نشان میدهند. در این مثال ساده، فرکانس وقوع یک الگوی حرکتی 0 یا 1 است. فاصله بین این دو SESI را می توان بر اساس رابطه (6) محاسبه کرد:
د3(اس1،اس2) =∑33i ، j = 1(اس1 ،نمن ج–اس2 ،نمن ج)232 * 3– 529= 0.08د3(اس1،اس2)=∑من،�=133(اس1،نمن�–اس2،نمن�)232*3–529=0.08
مقدار فاصله کم نشان می دهد که الگوهای تعامل بین دو MPO، طبق QTC B ، از نظر کیفی در هر دو بازه زمانی مشابه هستند.
در مورد چندین جفت مسیر، میتوانیم یک الگوریتم خوشهبندی سلسله مراتبی را بر اساس فاصله بین هر دو SESI اعمال کنیم تا جفتهایی از مسیرها را که الگوهای تعامل مشابهی دارند شناسایی کنیم.
ایده پشت خوشهبندی سلسله مراتبی، ساختن درختی باینری از دادهها است که بهطور متوالی گروههای مشابهی از اشیاء را ادغام میکند. این درخت دودویی تصویری از خلاصه ای مفید از داده ها را ارائه می دهد. در این مطالعه، ما از یک روش خوشهبندی سلسله مراتبی تجمعی استفاده میکنیم که یک دندروگرام را به دست میدهد که نشاندهنده گروهبندی تودرتو از اشیاء ( به صورت جفت مسیر) است. محور افقی در دندروگرام نشان دهنده اشیاء خوشه ای است، در حالی که محور عمودی فاصله بین خوشه ها را نشان می دهد. ما از میانگین پیوند برای محاسبه فاصله بین خوشه جدید و هر یک از خوشه های قدیمی استفاده می کنیم (برای توضیح بیشتر در مورد پیوند متوسط در خوشه بندی [ 61 ) مراجعه کنید.]). فاصله بین دو خوشه به عنوان میانگین فاصله بین اشیاء از خوشه اول و اشیاء از خوشه دوم محاسبه می شود. ما سه مرحله اصلی که در بالا ذکر شد را در بخش بعدی نشان خواهیم داد.

شکل 5. دو جفت مسیر در دو بازه زمانی مختلف.

شکل 6. الگوهای حرکت و SESI برای جفت های مسیر نشان داده شده در شکل 5 .
4. تصویرسازی
در این بخش، روش خود را در دو مثال اعمال خواهیم کرد: یک رویداد سبقت ساده و رقص سامبا.
4.1. مثال 1: رویداد سبقت گرفتن در بزرگراه
شکل 7 پنج وضعیت ترافیکی مختلف را با دو اتومبیل ( k و l ) نشان میدهد که در آن هر موقعیت 7 ثانیه طول میکشد (گامهای زمانی 1 ثانیه). سه موقعیت اول رویدادهای سبقت ساده هستند. جدول 1 الگوهای حرکت QTC B را برای هر پنج جفت مسیر نشان می دهد. به دنبال روش شناسی خود، ابتدا باید جفت مسیرها را به دنباله ای از روابط کیفی تبدیل کنیم. این توالی ها در جدول 1 نشان داده شده اند . سپس دنباله ها را به SESI با طول های 2 و 3 تبدیل می کنیم ( شکل 8 ). سپس فاصله بین تمام جفتهای SESI با طول مشخص را اندازهگیری میکنیم. سپس این اندازهگیریهای فاصله در یک ماتریس فاصله (متقارن) برای هر طول SESI قرار میگیرند.شکل 9 ). ما در نهایت جفت های مسیر را با استفاده از روش خوشه بندی سلسله مراتبی گروه بندی می کنیم ( شکل 9 ). همانطور که در جدول 1 ارائه شده است ، الگوهای حرکتی سه موقعیت اول (1، 2 و 3) مشابه یکدیگر و الگوهای حرکتی دو موقعیت آخر (4 و 5) یکسان است. در واقع، ماتریس فاصله نشان می دهد که سه جفت مسیر اول از نظر روابط کیفی یکسان هستند ( جدول 1 را ببینید ).

شکل 7. پنج موقعیت ترافیکی.

شکل 8. SESI های طول های 2 و 3 برای همه موقعیت ها.

شکل 9. ماتریس های فاصله و خوشه بندی سلسله مراتبی پنج موقعیت ترافیکی (پنج جفت مسیر) برای SESI با طول های 2 و 3 بر اساس تابع فاصله در معادله (6).

جدول 1. الگوهای حرکت QTC پنج جفت مسیر بالا بین دو خودرو، k و l.
سپس جفت های مسیر با الگوهای حرکتی مشابه QTC B در همان خوشه ها قرار می گیرند. بنابراین، جفت های مسیر 1، 2 و 3 با هم در یک خوشه گرفته می شوند، در حالی که جفت های مسیر 4 و 5 در یک خوشه دیگر گروه بندی می شوند. در اینجا، تجزیه و تحلیل خوشه ای امکان مقایسه حرکات MPO ها را بر اساس الگوهای حرکت QTC B استخراج شده از جفت های مسیر می دهد. مقدار فاصله در هر شاخه در دندروگرام نشان دهنده فاصله متوسط بین SESI ها در شاخه ها است. شکل 9 تنها خوشهبندی سلسله مراتبی SESI با طولهای 2 و 3 را نشان میدهد. دلیل آن این است که حداکثر طول دنباله های در نظر گرفته شده برابر با 3 در تمام موقعیت های ارائه شده در جدول 1 است ..
4.2. مثال 2: رقص سامبا
تعامل بین MPOها می تواند در واقعیت بسیار پیچیده تر باشد. در این قسمت به طور خاص به بررسی حرکت چند MPO می پردازیم. ما از مجموعه دادهای از حرکات یک رقصنده سامبا در چهار بازه زمانی مختلف استفاده میکنیم که هر یک 0.8 ثانیه طول میکشد. فواصل زمانی عمداً کوتاه در نظر گرفته شده است تا بتوان به راحتی شباهت بین مسیر حرکت را تشخیص داد. حرکات چهار قسمت از بدن رقصنده شامل انگشت راست (دست راست)، انگشت چپ (دست چپ)، انگشت راست (پای راست) و انگشت چپ (پای چپ) در هر زمانی از حرکت با دانه بندی زمانی 0.04 ثانیه گرفته می شود ( شکل 10). دلیل اصلی در نظر گرفتن تنها چهار قسمت بدن برای بررسی حرکت رقص، تعداد فعل و انفعالات بیشتر آنها نسبت به سایر قسمت های بدن رقصنده است.
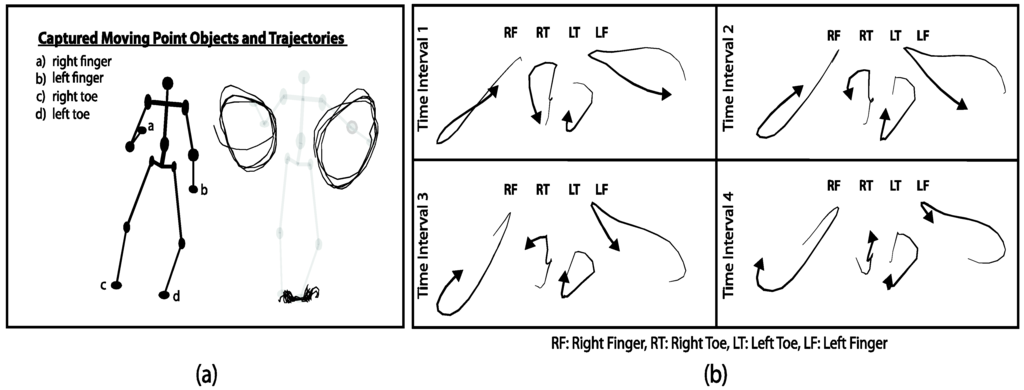
شکل 10. ( الف ) حرکت انتزاعی یک رقصنده سامبا بر اساس چهار قسمت بدن (انگشت راست، انگشت چپ، پای راست و پای چپ)، و ( ب ) نمای بالا از حرکات رقصنده سامبا در طول چهار قسمت مختلف فواصل زمانی، هر کدام 0.8 ثانیه طول می کشد.
اطلاعات موقعیتی توسط یک سیستم ضبط حرکت مادون قرمز گرفته شده است که موقعیت نشانگرهای متصل به بدن را در فضای سه بعدی نشان می دهد ( شکل 10 ب). داده ها با توجه به یک نقطه مرجع و جهت بدن رقصنده نرمال شده اند (آن نقطه به عنوان مرکز بدن که ریشه نامیده می شود) تعریف می شود.
از آنجایی که هر SESI نشاندهنده تعامل بین دو MPO است، تعامل چندین MPO را میتوان به طور همزمان روی یک SESI تازه تشکیل شده به نام hyper-SESI، که به همه زیر SESIها تبدیل میشود، مشاهده کرد. بر اساس روابط متوالی QTC B همه جفت های ممکن MPO در هر بازه زمانی، ما hyper-SESI را برای چهار بازه زمانی مساوی بر اساس فراوانی الگوهای حرکت QTC B ایجاد می کنیم ( شکل 11 ). برای افزایش دید الگوهای حرکت QTC B تبدیل شده، الگوهای حرکتی QTC B غیرممکن و ناچیز نشان داده نمی شوند.
با توجه به اینکه در این زیربخش فقط حرکت چهار قسمت از بدن یک رقصنده بررسی شده است، شش جفت تعامل احتمالی وجود دارد. جفتهای برهمکنش حرکتی بین قسمتهای مختلف بدن بر حسب hyper-SESI برای هر بازه زمانی حرکت در شکل 11 نشان داده شدهاند . در هر hyper-SESI، سمت چپ ترین سلول تعامل بین انگشت راست و پای راست رقصنده را بیان می کند و پایین ترین سلول نشان دهنده تعامل یا در واقع QTC B است.الگوی حرکت، بین انگشت پای چپ و انگشت چپ. توجه داشته باشید که فقط قسمت های بالایی مورب اصلی هایپر SESI ها باید در نظر گرفته شود زیرا فعل و انفعالات قطعات متحرک متقارن است. ما سعی می کنیم کشف کنیم که آیا درجه ای از نزدیکی / شباهت بین الگوهای حرکت QTC B جفت های مختلف بدن در فواصل زمانی مختلف حرکت وجود دارد یا خیر. بر اساس زمینه داده های حرکت، ما می توانیم hyper-SESIs را تفسیر کنیم. برای مثال می دانیم که رقص سامبا یک رقص موزون است که در حرکات نظم دارد. نظم در حرکات را می توان در سلول های hyper-SESIs تشخیص داد. در شکل 11، سلول سمت چپ بالای hyper-SESIs فعل و انفعالات بین انگشت راست و پای راست را در چهار بازه زمانی مختلف نشان می دهد. میتوان مشاهده کرد که الگوهای حرکتی QTC B تکراریتر در بازه زمانی 4 وجود دارد، زیرا الگوهای پرتکرارتری در Hyper-SESI آن مشاهده میشوند. این بدان معنی است که تناوب یا فرکانس الگوها در چنین رقص ریتمیک سریع می تواند در زمان متفاوت باشد.

شکل 11. Hyper-SESIs از چهار بازه زمانی مساوی از حرکات بر اساس فراوانی الگوهای حرکت QTC B.
از منظر ارزیابی بصری، هنگامی که ما با دقت بیشتری به hyper-SESI ها نگاه می کنیم، تفاوت های زیادی پیدا می شود. به عنوان مثال، SESI های انگشت راست و انگشت پای چپ در اولین فاصله زمانی حرکت کمی با SESI در سایر فواصل زمانی متفاوت است. الگوهای حرکت QTC B{ ( + 0 ) → ( + + ) }{(+ 0)→(+ +)}و { ( + − ) → ( + 0 ) }{(+ –)→(+ 0)}به طول دو و { ( + 0 ) → ( + + ) ) → ( 0 + ) }{(+ 0)→(+ +))→(0 +)}و { ( + − ) → ( + 0 ) → ( + + ) }{(+ –)→(+ 0)→(+ +)}طول سه در اولین فاصله زمانی حرکت مشاهده می شود اما در فواصل دیگر مشاهده نمی شود. وقتی انتظار الگوهای خاصی با فرکانس خاص را داشته باشیم، منطقی تر است. به عنوان مثال، در مطالعه موردی ما، یک معلم رقص میتواند از آماتور رقص بخواهد تا برخی حرکات را انجام دهد. الگوهای حرکتی درخواستی باید در SESI های مربوطه رعایت شود، مگر اینکه آماتور رقص موفق به اجرای آن نشده باشد.
علاوه بر فرکانس، هر سلول در یک SESI ممکن است ویژگی های دیگری مانند مدت زمان الگوهای حرکت QTC B را ذخیره کند ( شکل 12 ). بر خلاف فرکانس، مدت زمان الگوهای حرکت QTC B متفاوت است و برخی از الگوهای حرکتی QTC B طولانی تر و برخی دیگر کوتاه تر هستند. همانطور که قبلا ذکر شد، دانه بندی زمانی گرفتن حرکت رقص 0.04 ثانیه است. برای سادگی، هر 0.04 ثانیه را یک واحد زمان واحد فرض می کنیم. مثلا الگو { ( + − ) → ( 0 − ) }{(+ –)→(0–)}ماندگاری 10 واحد زمانی معادل است 10 × 0.04 = 0.4 ثانیه 10×0.04=0.4س.

شکل 12. Hyper-SESIs از چهار بازه زمانی مساوی از حرکات بر اساس مدت زمان الگوهای حرکت QTC B.
علاوه بر قضاوت بصری در مورد SESI یا Hyper-SESIs، کیفیت اجرای رقص را می توان اندازه گیری کرد. می توان اجرای یک رقصنده (که به عنوان معیار در نظر گرفته می شود) و اجرای سایر رقصندگان مقایسه کرد. برای این منظور، فاصله بین hyper-SESIهای مربوطه را اندازه گیری می کنیم. در واقع، ما میتوانیم نه تنها حرکات هر جفت، مانند انگشت چپ و راست را در فواصل زمانی مختلف حرکت، بلکه فاصله کلی فعل و انفعالات کل بدن را نیز بررسی کنیم. برای محاسبه فاصله کلی بین دو Hyper-SESI، یک فاصله متوسط در نظر گرفته شده است. این رویکرد به این معنی است که یک میانگین از تمام اقدامات فاصله ای که از مقایسه همه SESI ها به دست آمده است (به عنوان مثالدر هر بازه زمانی حرکت، انگشت راست-انگشت پای راست، انگشت راست-انگشت پای چپ، انگشت راست-انگشت چپ، انگشت راست-انگشت پای چپ، انگشت پای راست-انگشت پای چپ و انگشت پای چپ-انگشت چپ) در هر بازه زمانی حرکت. نتایج در شکل 13 نشان داده شده است ، که در آن عملکرد کلی رقصنده سامبا در بازه زمانی 1 با در نظر گرفتن مقادیر فرکانس بیشتر شبیه به بازه زمانی 3 است ( شکل 13 a)، در حالی که نتایج مقایسه SESI های مبتنی بر مدت زمان ( شکل) 13 ب) تشابه بیشتر بین بازه های زمانی 3 و 4 را تایید می کند.
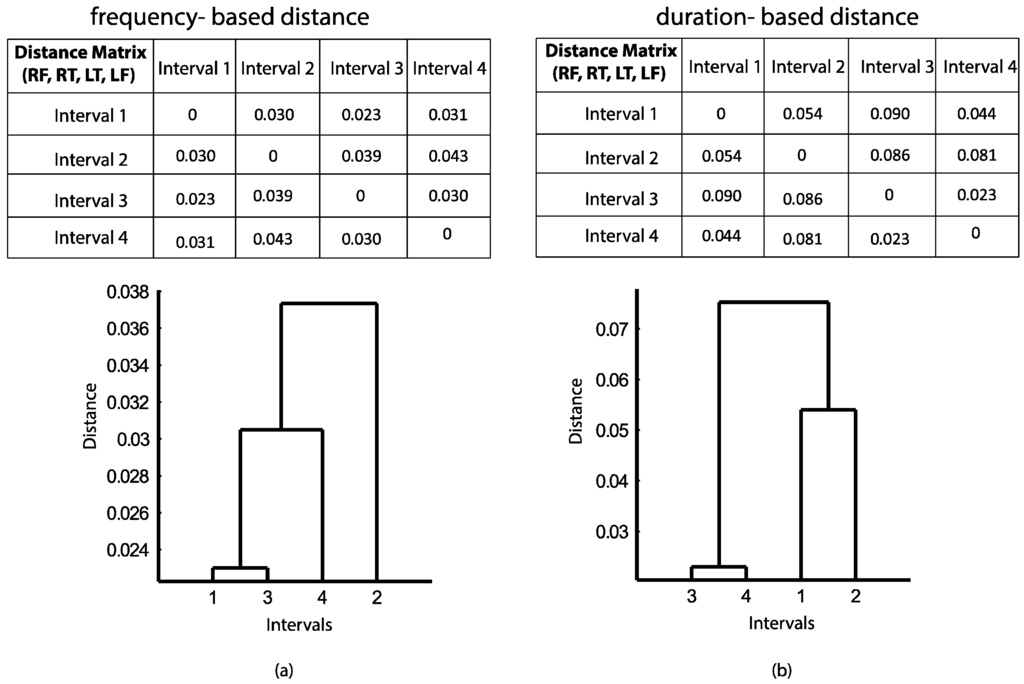
شکل 13. فاصله بین hyper-SESI ها در چهار بازه زمانی حرکت برای ( a ) فرکانس و ( b ) مدت زمان در کنار دندروگرام هایی که نشان دهنده خوشه بندی سلسله مراتبی تجمعی از جفت مسیرها هستند.
5. بحث
در این مطالعه، ما به کاوش الگوهای حرکتی نسبی یک جفت MPO (به عنوان مثال، دو اتومبیل) یا چندین MPO (به عنوان مثال، اعضای بدن رقصندگان) کمک کردیم. اول، ما در مورد اینکه چگونه میتوانیم دادههای کیفی را در فرآیند کشف دانش از دادههای حرکتی مشارکت دهیم، مشارکت کردیم. در این راستا، ما از QTC استفاده گسترده ای کردیم که برای فرمول بندی روابط متقابل بین اجسام متحرک مورد مطالعه قرار گرفته است. ما از مفهوم این حساب برای نشان دادن سودمندی، کاربرد و قدرت آن در استدلال در مورد حرکت اجسام استفاده کردیم. ما الگوهای حرکت نسبی را بر حسب توالی روابط QTC توصیف کردیم. دوم، ما یک اندازه گیری فاصله برای خوشه بندی الگوهای حرکتی پیشنهاد کردیم. برای این منظور، ما یک ساختار داده مکانی – زمانی تعریف کردیم، یعنیامضای توالی (SESI)، برای فهرست کردن توالی روابط QTC. علاوه بر نمایه سازی الگوهای حرکتی، SESIs زمینه ای را برای تجزیه و تحلیل بصری الگوهای حرکتی که از تعاملات بین MPO ها حاصل می شود، در اختیار ما قرار داد.
پراکندگی الگوهای حرکت QTC B که رخ داده است در SESI قابل مشاهده است. در دسترس بودن داده های حرکتی ریز دانه در فواصل نمونه برداری زمانی کوچک، دشواری تشخیص الگوهای حرکتی QTC B در SESIs را افزایش می دهد. یعنی، SESIها به عنوان یک رویکرد کمک بصری برای درک پراکندگی QTC B استفاده میشوند. الگوهای حرکتبا این حال، ما SESI را از نظر ریاضی به عنوان یک آرایه مستطیلی از اعداد، نمادها یا عبارات می بینیم که در ردیف ها و ستون ها مرتب شده اند. آیتم های منفرد در این ماتریس به عنوان عناصر یا ورودی های آن نامیده می شوند (به عنوان مثال، فرکانس QTC Bالگوهای حرکتی). از منظر محاسباتی، هر چه طول یک SESI بیشتر باشد، زمان بیشتری برای محاسبه فاصله بین دو SESI مورد نیاز است. به طور خلاصه، محاسبه فاصله برای هر طول SESI امکان پذیر است، اما تشخیص بصری الگوهای حرکت طولانی در SESI ها چالش برانگیز خواهد بود.
داده های حرکتی مورد استفاده در رویکرد ما باید از قبل پردازش شده و عاری از هرگونه خطای جابجایی باشد. بر خلاف بسیاری از معیارهای مشابه دیگر مانند فاصله ویرایش، تغییر تا حد زیادی بر الگوهای QTC، و در نتیجه، SESI و مقادیر اندازه گیری فاصله تأثیر می گذارد. دانش ناقص را می توان با QTC مدیریت کرد. چنین دانش ناقصی از نظر روابط QTC می تواند سپس به نمایندگی های SESI منتقل شود و در نتیجه برای استدلال در مورد تعاملات بین MPO ها مورد استفاده قرار گیرد. بدیهی است که در این شرایط، اطلاعات موجود می تواند برای ارائه پاسخ کامل به سوالات ناکافی باشد. با این حال، « یک پاسخ جزئی ممکن است بهتر از عدم پاسخ باشد. همانطور که Freksa [ 62 ] استدلال می کند.
علاوه بر خطاها / نویزها / جابجایی ها، و نقص مرتبط با داده ها، انتخاب دانه بندی مناسب مکانی و زمانی داده های ردیابی موضوع مهمی است که باید در نظر گرفته شود، به ویژه در زمینه نسبتاً جوان تحلیل حرکت. این همان چیزی است که در [ 34 ] غم و اندوه دانه بندی نامیده شده است . اگرچه این موضوع تأثیر کمتری بر نتایج روش پیشنهادی دارد، اما باید یک مطالعه کامل برای بررسی دقیق تأثیر آن بر الگوهای QTC انجام شود.
در طول این مطالعه، دو مثال مختلف مورد تجزیه و تحلیل قرار گرفته است. در مثال اول، الگوهای حرکتی دو خودرو در پنج سناریوی مختلف ترافیک ارزیابی شده است. در مثال دوم حرکات پیچیده تری مورد بررسی قرار می گیرد. برخلاف سناریوی ترافیک، رقصندگان سامبا آزادانه در حال حرکت هستند و مسیرهای پیچیده ای را ایجاد می کنند. اگرچه رویکرد پیشنهادی برای دو مجموعه داده در مقیاس کوچک اعمال میشود، اما این پتانسیل را دارد که برای مجموعه دادههای بزرگتر و پیچیدهتر استفاده شود که پردازش با استفاده از تکنیکهای پردازش داده سنتی دشوار است. در این زمینه، دقت مورد نیاز نتایج تجزیه و تحلیل معمولاً به نوع کاربرد مورد نظر بستگی دارد. نمایش تعاملات حرکتی با یک نمایش کیفی مانند QTC B(رویکرد ما) به طور قابل توجهی دقت نتیجه را کاهش می دهد. با این حال، انواع دیگر QTC، مانند QTC-Double Cross (QTC C )، میتوانند اطلاعات مرتبطتری را در مورد حرکت ترکیب کنند. علاوه بر فاصله اقلیدسی در نظر گرفته شده در QTC B ، در QTC C ، اطلاعات جهت بین دو جسم متحرک گنجانده شده است. در نتیجه، برای تجسم الگوهای حرکت QTC C ، یک SESI با وضوح بالا جدید مورد نیاز است زیرا هر رابطه QTC C با یک چهار تایی نشان داده میشود (برای توضیح بیشتر در مورد QTC C ، ([ 53 ]) را ببینید.
در پایان این بخش، روش پیشنهادی را با روش ارائه شده در [ 63 ] مقایسه می کنیم که در آن همان مطالعه موردی ( یعنی رقص) مورد مطالعه قرار گرفت. ما نقاط قوت و ضعف روش را در مقایسه با روش [ 63 ] از نقطه نظر مدل سازی داده ها توصیف می کنیم. در کار قبلی ما [ 63]، ما شباهت هایی را در رفتار حرکتی بین جفت اجسام متحرک در حال تعامل در طول زمان با گرده افشانی متقابل QTC با روش های تراز توالی (SAMs) شناسایی کردیم. در آنجا، به دلایلی از تراز توالی برای محاسبه شباهت بین دنباله های حرکتی روابط QTC استفاده شد. مهمتر از همه، از نقطه نظر تحلیل بصری، رویکرد SAM از شهود انسان برای تفسیر نتایج بصری بهتر پشتیبانی می کند. بنابراین، وابستگی زیاد به دانش خبره را میتوان به عنوان نقطه ضعف رویکرد SESI به حساب آورد و این به ویژه زمانی که دادههای چند بعدی نمایش داده میشوند، بیشتر است.
متفاوت از مطالعه قبلی ما که در آن دادههای حرکتی فقط در قالب دنبالهها بررسی شدند، در این مقاله ما سودمندی اطلاعات کیفی ادغام شده با SESI را در تجزیه و تحلیل و استدلال در مورد دادههای چند بعدی نشان دادیم. ما نشان دادیم که hyper-SESI ها نه تنها برهمکنشهای چندین شی (بیش از دو شی) را پوشش میدهند، بلکه ویژگیهای الگوی حرکتی مرتبط با اشیاء تعاملی مانند فرکانس و مدت زمان را نیز شامل میشوند.
6. نتیجه گیری و کار آینده
کشف دانش مسیر حرکت اجسام یک موضوع مهم و چالش برانگیز در بسیاری از حوزه های تحقیقاتی است. این مطالعه تکنیک جدیدی را برای خوشه بندی جفت مسیرها ارائه کرد که بر اساس سه مرحله اصلی است. در مرحله اول، الگوهای حرکت نسبی MPO ها را با استفاده از حساب مسیر کیفی (QTC) توصیف کردیم. QTC ما را قادر می سازد تا تعاملات بین اجسام متحرک را به صورت کیفی بیان کنیم. در مرحله بعدی، الگوهای حرکت QTC B در یک امضای توالی (SESI) نشان داده شد، که یک روش فراکتالی برای نگاشت الگوهای تعامل بین MPOها در یک فضای شطرنجی نمایه شده است. سپس در مرحله سوم، از تابع فاصله برای خوشه بندی SESIها استفاده شد و هدف آن بهبود درک الگوهای حرکتی است.
برخلاف بسیاری از معیارهای تشابه مسیر که به انتزاعات هندسی مسیرها محدود میشوند، ما توانستیم فاصله بین جفتهای مسیر را بر اساس الگوهای حرکتی QTC B اندازهگیری کنیم. روش پیشنهادی می تواند در طیف وسیعی از کاربردهای تحقیقاتی مورد استفاده قرار گیرد. الگوهای حرکتی مانند راه رفتن، دویدن، پریدن، بلند کردن، ضربه زدن و شنا را می توان برای اهداف مختلف بررسی کرد. به عنوان مثال، رویکرد پیشنهادی می تواند در علوم ورزشی برای تجزیه و تحلیل حرکت ورزشکاران با هدف توانبخشی، تربیت بدنی و تمرین مورد استفاده قرار گیرد. تاکید درمان می تواند متنوع باشد، از توانبخشی اندام فوقانی و توانبخشی تعادل، تا توانبخشی بخش های خاص بدن [ 64 ].
رویکرد خوشهبندی پیشنهادی میتواند جفتهایی از تعاملات را خوشهبندی کند و ارزیابی کند که آیا فعل و انفعالات بدن نسبت به یک تعامل بدنی “عادی” به اندازه کافی بهبود یافته است یا خیر. به عنوان مثال، در مورد شنا، بررسی الگوهای حرکتی اندام تحتانی/فوقانی شناگران ویژگی های مشترک شناگران تازه کار و چگونگی تغییر این ویژگی ها با افزایش مهارت در طول دوره آموزشی را مشخص می کند. رویکرد پیشنهادی میتواند در تجزیه و تحلیل رقص استفاده شود، جایی که بررسی الگوهای حرکتی اعضای بدن رقصندگان برای کمک به مربیان برای اهداف آموزشی مهم است.
ما همچنین میتوانیم از رویکرد پیشنهادی به عنوان یک تکنیک تجزیه و تحلیل تکمیلی برای حمایت از مربیگری در برخی ورزشها مانند فوتبال استفاده کنیم. برای مثال، رفتارهای حرکتی بازیکنان خاص (مثلا مهاجمان) در دورههای زمانی مختلف بازی را میتوان برای کشف تکنیکها یا استراتژیهایی که منجر به الگوهای حرکتی مکرر QTC در SESI میشود، بررسی کرد. این یک گام جالب به سمت تجزیه و تحلیل بصری رفتار حرکتی بازیکنان با استفاده از SESIs خواهد بود.
منابع
- حقانی، ع. حامدی، م. سعدآبادی، ک.ف. جوان، اس. Tarnoff, P. مجموعه داده های مربوط به زمان سفر آزادراه حقیقت زمینی با سنسورهای بلوتوث. ترانسپ Res. ضبط J. Transp. Res. هیئت 2009 . [ Google Scholar ] [ CrossRef ]
- Cagnacci، F. بویتانی، ل. پاول، RA; بویس، ام اس، اکولوژی حیوانات با رادیوتلمتری مبتنی بر GPS مواجه می شود: طوفانی عالی از فرصت ها و چالش ها. فیلوس ترانس. R. Soc. B Biol. علمی 2010 . [ Google Scholar ] [ CrossRef ] [ PubMed ]
- براکمن، دی. هافناگل، ال. Geisel, T. قوانین مقیاس پذیری سفر انسان. طبیعت 2006 ، 439 ، 462-465. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ویسبی، بی. مونتگومری، پی.جی. Pyne، DB؛ Rattray، B. کمی کردن نیازهای حرکتی فوتبال AFL با استفاده از ردیابی GPS. J. Sci. پزشکی ورزش 2010 ، 13 ، 531-536. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ورسیکله، ام. نویتنز، تی. دلافونتین، ام. Van de Weghe، N. استفاده از بلوتوث برای تجزیه و تحلیل دینامیک مکانی و زمانی حرکت انسان در رویدادهای جمعی: مطالعه موردی جشن های گنت. Appl. Geogr. 2012 ، 32 ، 208-220. [ Google Scholar ] [ CrossRef ]
- تیرو، م. سالویر، ای. آحاس، ر. Aasa، A. ابزار نظارت مبتنی بر وب برای ارزیابی تحرک فضا-زمان گردشگران با استفاده از داده های موقعیت یابی موبایل: فشارسنج پوزیتیوم. J. فناوری شهری. 2010 ، 17 ، 71-89. [ Google Scholar ] [ CrossRef ]
- اهلکویست، او. بان، اچ. کرسی، ن. Shaw, NZ Statistical counterpoint: کشف دانش اطلاعات رقص با استفاده از تجزیه و تحلیل و تجسم مکانی-زمانی. Appl. Geogr. 2010 ، 30 ، 548-560. [ Google Scholar ] [ CrossRef ]
- چاوشی، ش. دی باتس، بی. نویتنز، تی. بان، اچ. اهلکویست، او. دی تره، جی. Van de Weghe، N. کشف دانش در دادههای رقص با استفاده از ماتریسهای حرکت نسبی و تابخوردگی زمانی دینامیکی. Appl. Geogr. 2014 ، 47 ، 111-124. [ Google Scholar ] [ CrossRef ]
- دلافونتین، ام. ورسیکله، ام. نویتنز، تی. Van de Weghe، N. تجزیه و تحلیل توالی های مکانی-زمانی در داده های ردیابی بلوتوث. Appl. Geogr. 2012 ، 34 ، 659-668. [ Google Scholar ] [ CrossRef ]
- دوج، اس. ویبل، آر. Lautenschutz، AK به سوی طبقه بندی الگوهای حرکتی. Inf. Vis. 2008 ، 7 ، 240-252. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شوال، ن. Isaacson, M. تراز توالی به عنوان روشی برای تجزیه و تحلیل فعالیت های انسانی در فضا و زمان. ان دانشیار صبح. Geogr. 2007 ، 97 ، 282-297. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. د، دی. آهنگ، استخراج مسیر WZ از حسگرهای حرکت باینری ناشناس در محیط هوشمند. بدانید. Sys 2013 ، 37 ، 346-356. [ Google Scholar ] [ CrossRef ]
- گودموندسون، جی. تحلیل وول، تی فوتبال با استفاده از ابزارهای مکانی-زمانی. محاسبه کنید. محیط زیست شهری سیس 2014 ، 47 ، 16-27. [ Google Scholar ] [ CrossRef ]
- جوش، DS; Kleer, JD Readings in Qualitative Reasoning about Physical Systems ; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1989. [ Google Scholar ]
- کلمنتینی، ای. فلیس، PD; هرناندز، دی. نمایش کیفی اطلاعات موقعیتی. آرتیف. هوشمند 1997 ، 95 ، 317-356. [ Google Scholar ] [ CrossRef ]
- Cohn، AG Calculi برای استدلال فضایی کیفی. در هوش مصنوعی و محاسبات ریاضی نمادین ; Springer Berlin Heidelberg: برلین، آلمان، 1996; صص 124-143. [ Google Scholar ]
- Monferrer، MTE; Lobo، FT سرعت کیفی. در موضوعات هوش مصنوعی ; Springer Berlin Heidelberg: برلین، آلمان، 2002; ص 29-39. [ Google Scholar ]
- رنز، جی. راوه، آر. Knauff، M. به سوی کفایت شناختی روابط فضایی توپولوژیکی. تف کردن شناخت. II 2000 ، 1849 ، 184-197. [ Google Scholar ]
- مولر، پی. استدلال و بازنمایی فضایی-زمانی توپولوژیکی. محاسبه کنید. هوشمند 2002 ، 18 ، 420-450. [ Google Scholar ] [ CrossRef ]
- ولتر، اف. زاخاریاشف، ام. بازنمایی و استدلال کیفی مکانی-زمانی: دیدگاه محاسباتی. کاوش کنید. آرتیف. هوشمند میلن جدید. 2002 ، 175-216. [ Google Scholar ]
- ون دی وه، ن. بازنمایی و استدلال در مورد اجسام متحرک: یک رویکرد کیفی. پایان نامه دکتری، دانشگاه گنت، کورتریک، بلژیک، 2004. [ Google Scholar ]
- بلوتو، ن. هانهاید، م. Van de Weghe, N. طراحی کیفی و اجرای تعاملات فضایی انسان و ربات. در رباتیک اجتماعی ؛ Herrmann, G., Pearson, M., Lenz, A., Bremner, P., Spiers, A., Leonards, U., Eds. انتشارات بین المللی Springer: برلین، آلمان، 2013; صص 331-340. [ Google Scholar ]
- دلافونتین، ام. Cohn، AG; Van de Weghe, N. پیاده سازی یک حساب کیفی برای تجزیه و تحلیل اجسام نقطه متحرک. کارشناس سیستم Appl. 2011 ، 38 ، 5187-5196. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کیسیلویچ، اس. منزمن، اف. نانی، م. Rinzivillo، S. خوشه بندی فضایی-زمانی. در کتاب داده کاوی و کشف دانش ; Maimon, O., Rokach, L., Eds. Springer US: NY, US, 2010; صص 855-874. [ Google Scholar ]
- آلون، جی. اسکلاروف، اس. کولیوس، جی. Pavlovic, V. کشف خوشه ها در داده های سری زمانی حرکت. محاسبات IEEE. Vis. تشخیص الگو 2003 ، 1 ، 375-381. [ Google Scholar ]
- چودوا، دی. گافنی، اس. Mjolsness، E. اسمایث، پی. مدلهای ترکیبی تغییرناپذیر ترجمه برای خوشهبندی منحنی. در مجموعه مقالات نهمین کنفرانس بین المللی کشف دانش و داده کاوی (ACM SIGKDD)، نیویورک، نیویورک، ایالات متحده آمریکا، 24-27 اوت 2003. صص 79-88.
- نانی، م. Pedreschi، D. خوشه بندی زمان محور از مسیر حرکت اجسام متحرک. جی. اینتل. Inf. Sys 2006 ، 27 ، 267-289. [ Google Scholar ] [ CrossRef ]
- آندرینکو، ن. آندرینکو، جی. تحلیل اکتشافی دادههای مکانی و زمانی . Springer: برلین، آلمان، 2006. [ Google Scholar ]
- هوانگ، سی. لیو، YH; Chiu، JK; الگوهای گروه موبایل لیم، EP Mining: یک رویکرد مبتنی بر مسیر. در پیشرفت در کشف دانش و داده کاوی ؛ Springer: برلین، آلمان، 2005; صص 145-146. [ Google Scholar ]
- گودموندسون، جی. ون کرولد، ام. محاسبات گله های طولانی مدت در داده های مسیر. در مجموعه مقالات چهاردهمین سمپوزیوم بینالمللی سالانه ACM در مورد پیشرفتها در سیستمهای اطلاعات جغرافیایی، نیویورک، نیویورک، ایالات متحده آمریکا، 5 تا 11 نوامبر 2006. صص 35-42.
- کانگ، جی اچ. ولبورن، دبلیو. استوارت، بی. Borriello, G. استخراج مکان ها از آثار مکان. در مجموعه مقالات دومین کارگاه بین المللی ACM در مورد برنامه های کاربردی تلفن همراه و خدمات بی سیم در نقاط اتصال WLAN، ACM، نیویورک، نیویورک، ایالات متحده آمریکا، 1 اکتبر 2004. صص 110-118.
- جیانوتی، اف. نانی، م. پینلی، اف. Pedreschi، D. استخراج الگوی مسیر. در مجموعه مقالات سیزدهمین کنفرانس بین المللی کشف دانش و داده کاوی (ACM SIGKDD)، ACM، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 12 تا 15 اوت 2007. صص 330-339.
- جیانوتی، اف. پدرشی، دی. تحرک، داده کاوی و حریم خصوصی: کشف دانش جغرافیایی . Springer: برلین، آلمان، 2008. [ Google Scholar ]
- لاوب، پی. Purves، RS سرعت یک گاو چقدر است؟ تجزیه و تحلیل مقیاس متقابل داده های حرکتی ترانس. GIS 2011 ، 15 ، 401-418. [ Google Scholar ] [ CrossRef ]
- لانگ، ج.ا. نلسون، TA اندازه گیری تعامل دینامیکی در داده های حرکتی. ترانس. GIS 2013 ، 17 ، 62-77. [ Google Scholar ] [ CrossRef ]
- آندرینکو، ن. آندرینکو، جی. طراحی روشهای تحلیل بصری برای مجموعههای عظیم دادههای حرکتی. Cartographica 2007 , 42 , 117-138. [ Google Scholar ] [ CrossRef ]
- آندرینکو، ن. آندرینکو، جی. واچوویچ، ام. Orellana، D. کشف فعل و انفعالات بین اشیاء متحرک. در مجموعه مقالات پنجمین کنفرانس بین المللی GIScience، پارک سیتی، UT، ایالات متحده آمریکا، 23-26 سپتامبر 2008; ص 16-26.
- لاوب، پی. ایمفلد، اس. Weibel, R. کشف الگوهای حرکتی نسبی در گروه های اجسام نقطه متحرک. بین المللی J. از Geogr. Inf. علمی 2005 ، 19 ، 639-668. [ Google Scholar ] [ CrossRef ]
- اومز، ک. آندرینکو، جی. آندرینکو، ن. دی مایر، پ. Fack, V. تجزیه و تحلیل بعد فضایی داده های حرکت چشم با استفاده از رویکرد تحلیلی بصری. کارشناس سیستم Appl. 2012 ، 39 ، 1324-1332. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پلکیس، ن. آندرینکو، جی. آندرینکو، ن. کوپاناکیس، آی. مارکتوس، جی. تئودوریدیس، ی. کاوش بصری داده های حرکتی از طریق تحلیل مبتنی بر شباهت. جی. اینتل. Inf. Sys 2012 ، 38 ، 343-391. [ Google Scholar ] [ CrossRef ]
- رینزیویلو، اس. پدرشی، دی. نانی، م. جیانوتی، اف. آندرینکو، ن. آندرینکو، جی. تجزیه و تحلیل مبتنی بر بصری دادههای حرکتی توسط خوشهبندی پیشرونده. Inf. Vis. 2008 ، 7 ، 225-239. [ Google Scholar ] [ CrossRef ]
- چاوشی، ش. دی باتس، بی. کیانگ، ی. دی تره، جی. Van de Weghe, N. رویکردی کیفی برای شناسایی، تجسم و تفسیر الگوهای حرکتی تکراری در گروههایی از اجسام نقطه متحرک. بین المللی عرب J. Inf. تکنولوژی 2015 ، در دست چاپ. [ Google Scholar ]
- دمسار، U. Virrantaus، K. چگالی فضا-زمان مسیرها: بررسی الگوهای مکانی-زمانی در دادههای حرکت. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 1527-1542. [ Google Scholar ] [ CrossRef ]
- گودموندسون، جی. ون کرولد، ام. Speckmann, B. تشخیص کارآمد الگوها در مسیرهای دوبعدی نقاط متحرک. GeoInformatica 2007 ، 11 ، 195-215. [ Google Scholar ] [ CrossRef ]
- ویلسون، سی. الگوهای فعالیت در فضا و زمان: محاسبه مسیرهای نماینده هاگرستراند. حمل و نقل 2008 ، 35 ، 485-499. [ Google Scholar ] [ CrossRef ]
- بوچین، ک. بوچین، م. ون کرولد، ام. لو، جی. یافتن بخش های طولانی و مشابه مسیرها. در مجموعه مقالات هفدهمین کنفرانس بین المللی پیشرفت در سیستم های اطلاعات جغرافیایی (ACM SIGSPATIAL GIS 2009)، ACM، سیاتل، WA، ایالات متحده آمریکا، 4-6 نوامبر 2009. صص 296-305.
- دوج، اس. ویبل، آر. فروتن، ای. آشکارسازی فیزیک حرکت: مقایسه شباهت ویژگیهای حرکتی انواع مختلف اجسام متحرک. محاسبه کنید. محیط زیست شهری سیس 2009 ، 33 ، 419-434. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لین، بی. Su، JW فاصله یک طرفه: برای جستجوی شباهت مبتنی بر شکل مسیرهای جسم متحرک. Geoinformatica 2008 ، 12 ، 117-142. [ Google Scholar ] [ CrossRef ]
- دوج، اس. کاوش حرکت با استفاده از تحلیل شباهت. پایان نامه دکتری، دانشگاه زوریخ، 2011. [ Google Scholar ]
- جیانوتی، اف. پدرشی، دی. تحرک، داده کاوی و حریم خصوصی: چشم اندازی از همگرایی. در تحرک، داده کاوی و حریم خصوصی-کشف دانش جغرافیایی ؛ Giannotti, F., Pedreschi, D., Eds. Springer: برلین، آلمان، 2008; صص 1-11. [ Google Scholar ]
- Glez-Cabrera، FJ; آلوارز-براوو، JV; دیاز، اف. نشان دادن الگوهای حرکتی با محاسبات طرح ریزی مستطیلی کیفی. در محاسبات توزیع شده و هوش مصنوعی ؛ Springer: برلین، آلمان، 2013; صص 251-258. [ Google Scholar ]
- ون دی وگه، ن. Cohn، AG; دی تره، جی. دی مایر، پی. حساب سیر کیفی به عنوان مبنایی برای نمایش اجسام متحرک در سیستم های اطلاعات جغرافیایی. سایبرن را کنترل کنید. 2006 ، 35 ، 97-119. [ Google Scholar ]
- ون دی وگه، ن. Cohn، AG; دی مایر، پ. Witlox، F. نمایش اجسام متحرک در سیستمهای خبره مبتنی بر رایانه: مثال رویداد سبقت. کارشناس سیستم Appl. 2005 ، 29 ، 977-983. [ Google Scholar ] [ CrossRef ]
- دلافونتین، ام. ون دی وگه، ن. بوگارت، پ. De Maeyer, P. روابط کیفی بین اجسام متحرک در یک شبکه که روابط توپولوژیکی آن را تغییر می دهد. Inf. علمی 2008 ، 178 ، 1997-2006. [ Google Scholar ] [ CrossRef ]
- دلافونتین، ام. چاوشی، ش. Cohn، AG; Van de Weghe, N. یک حساب سیر کیفی برای استدلال در مورد اجسام نقطه متحرک. در بازنمایی و استدلال کیفی مکانی-زمانی: روندها و جهت گیری های آینده . هزاریکا، اس ام، اد. IGI Global: Hershey, PA, USA, 2012; صص 147-167. [ Google Scholar ]
- Cohn، AG; هزاریکا، SM بازنمایی و استدلال فضایی کیفی: مروری. فاندم Inf. 2001 ، 46 ، 1-29. [ Google Scholar ]
- گالتون، A. نمودارهای تسلط: ابزاری برای استدلال کیفی در مورد سیستم های پیوسته. فاندم Inf. 2001 ، 46 ، 55-70. [ Google Scholar ]
- Forbus، KD نظریه فرآیند کیفی. آرتیف. هوشمند 1984 ، 24 ، 85-168. [ Google Scholar ] [ CrossRef ]
- بارنزلی، فراکتال های MF در همه جا . انتشارات آکادمیک: نیویورک، نیویورک، ایالات متحده آمریکا، 1988. [ Google Scholar ]
- روکاچ، ال. Maimon، O. بررسی الگوریتم های خوشه بندی. در کتاب داده کاوی و کشف دانش ; Rokach, L., Maimon, O., Eds. Springer: برلین، آلمان، 2010; ص 269-298. [ Google Scholar ]
- داویندت، پی. دی مایر، اچ. De Baets, B. الگوریتم خوشه بندی پیوند کامل مورد بازبینی قرار گرفت. محاسبات نرم. 2005 ، 9 ، 385-392. [ Google Scholar ] [ CrossRef ]
- فرکسا، سی. استدلال زمانی بر اساس نیمه فواصل. آرتیف. هوشمند 1992 ، 54 ، 199-227. [ Google Scholar ] [ CrossRef ]
- چاوشی، ش. دی باتس، بی. نویتنز، تی. دی تره، جی. Van de Weghe، N. بررسی دادههای حرکت رقص با استفاده از روشهای همترازی توالی. PLoS ONE 2015 ، 10 . [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- شوناور، سی. پینتاریک، تی. کافمن، اچ. تعامل کامل بدن برای بازی های جدی در توانبخشی حرکتی. در مجموعه مقالات دومین کنفرانس بین المللی انسان تقویت شده، توکیو، ژاپن، 13 مارس 2011. پ. 4.
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر