

خلاصه
تعداد ماهواره های قابل مشاهده برای گیرنده سیستم ماهواره ای ناوبری جهانی (GNSS) برای بررسی های با دقت بالا مهم است. برای کمک به این امر، بستههای نرمافزاری وجود دارد که قادر به پیشبینی دید GNSS در هر نقطه از جهان در هر زمانی از روز هستند. این بستههای پیشبینی با استفاده از سالنامههایی که بهطور منظم بهروزرسانی میشوند، حاوی دادههای موقعیتی برای همه ماهوارههای ناوبری عمل میکنند. با این حال، یکی از مسائلی که استفاده از آنها را محدود می کند این است که اکثر بسته ها فرض می کنند که هیچ مانعی در افق وجود ندارد. در تلاش برای بهبود این امر، بستههای برنامهریزی خاصی اکنون قادر به مدلسازی موانع ساده هستند که به موجب آن بخشهایی از افق قابل مشاهده از یک مکان میتوانند مسدود شوند و در نتیجه ساختمانها یا دیگر ساختارهای عمودی را شبیهسازی کنند. در حالی که این برای بررسی های استاتیک مفید است، هنگامی که گیرنده GNSS در حال حرکت است برای بررسی های پویا قابل استفاده نیست. این مشکل در گذشته با استفاده از مدلهای ساختمانی دقیق و با دقت بالا و طراحی روشهای جدید برای مدلسازی موقعیتهای ماهوارهای با استفاده از سالنامههای GNSS، که رویکردی زمانبر و پرهزینه است، برطرف شده است. راه حل ارائه شده در این مقاله استفاده از یک GIS برای ترکیب نرم افزار پیش بینی GNSS موجود و آزادانه برای پیش بینی مکان های شبه ماهواره ای، ترکیب یک مدل 2.5 بعدی از ساختمان ها در یک منطقه ایجاد شده با نقشه برداری برداری 2 بعدی آژانس نقشه برداری ملی و داده های ارتفاعی کم چگالی است. تا نیاز به بررسی کامل را به حداقل برسانید و در نتیجه از نظر هزینه و زمان صرفه جویی کنید. پس از این، ابزار viewshed ESRI ArcMap برای تعیین اینکه چه مناطقی به دلیل انسداد در یک منطقه وسیع، دید ضعیف GNSS را نشان میدهند، استفاده شد.
کلید واژه ها:
سایه GNSS ; پیش بینی GNSS نظرسنجی موبایل مشاهده شد
1. معرفی
برای نقشه برداری با دقت بالا، دید ماهواره ای بیشترین اهمیت را دارد. اگر چه چهار ماهواره حداقل تعداد مورد نیاز ریاضی برای رفع موقعیت سه بعدی هستند [ 1]، اکثر گیرنده ها به حداقل پنج ماهواره نیاز دارند تا در حالت واقعی سینماتیک (RTK) کار کنند. بنابراین، انگیزه قوی برای نقشه برداران وجود دارد تا اطمینان حاصل کنند که تعداد کافی ماهواره در مکان مورد نیاز قابل مشاهده است، زیرا ممکن است از نظر هزینه مالی صرفه جویی شود، در صورتی که نیاز به بررسی مجدد یک منطقه در صورت الزامات دقت تعیین شده در مشخصات بررسی برآورده نمی شود یا زمانی که تعداد کم ماهواره های قابل مشاهده باعث می شود گیرنده سیگنال سیستم جهانی ناوبری ماهواره ای (GNSS) را از دست بدهد و در نتیجه زمانی که نقشه بردار منتظر دریافت مجدد سیگنال است، با تاخیر مواجه شود. پیشبینی تعداد ماهوارههایی که در یک مکان خاص برای گیرنده قابل مشاهده خواهند بود، به لطف بستههای برنامهریزی GNSS دسکتاپ موجود مانند Trimble Planning برای بررسی در مناطق بدون مانع نسبتاً آسان است [ 2] .] یا ابزارهای برنامه ریزی آنلاین GNSS مشابه [ 3 ]. این ابزارها قادر به پیش بینی دید ماهواره در هر نقطه از کره زمین و در هر زمانی از روز هستند. هر بسته مجهز به سالنامههایی است که حاوی دادههای زودگذر مداری برای همه ماهوارهها است و میتوان آنها را به گونهای پیکربندی کرد که ماهوارههای صورت فلکی GPS، GLONASS، COMPASS یا GALILEO را در نتایج پیشبینی شامل شود.
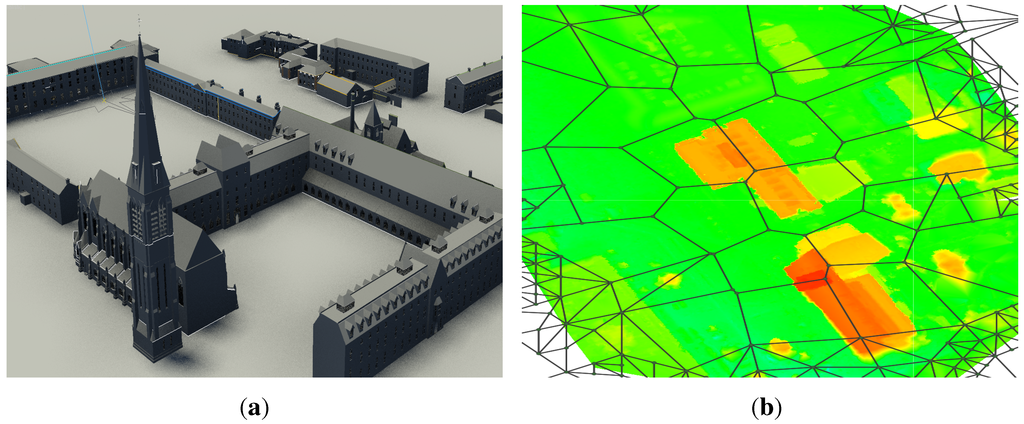
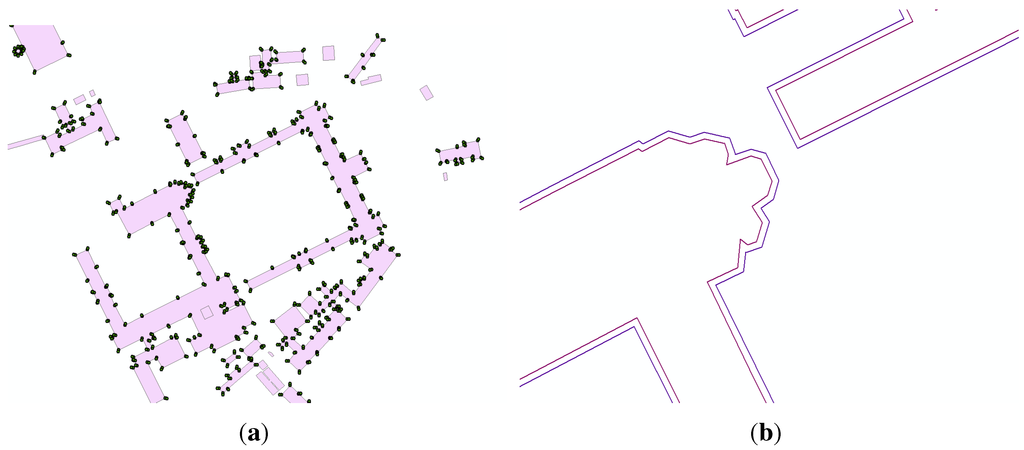
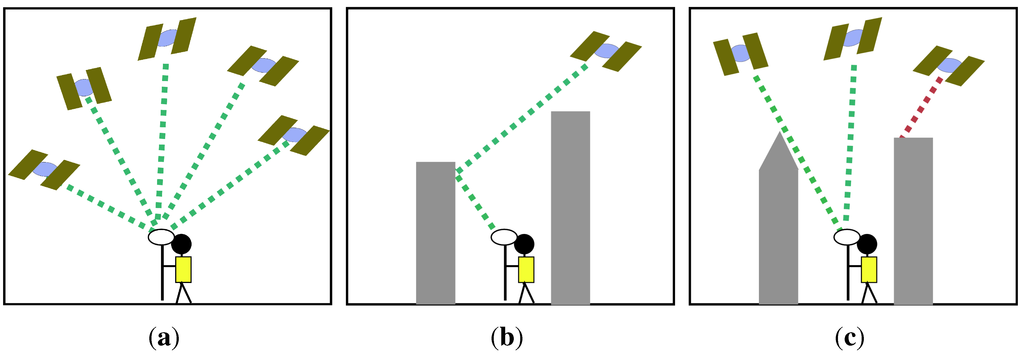
یکی از کاستیهای روشهای موجود این است که آنها توانایی محدودی برای مدلسازی دید ماهوارهای در مواقعی که موانعی در افق وجود دارد، دارند. این امر کاربرد آنها را در بسیاری از سناریوهای بررسی محدود میکند، زیرا انجام بررسیهای توپوگرافی در مناطق محدود بسیار رایج است، و بنابراین، سایههای GNSS تقریباً وجود دارند. به عنوان مثال، در شکل 1a، یک بررسی توپوگرافی GNSS در یک منطقه محدود در حال انجام است که سیگنال GNSS به طور بالقوه می تواند توسط ساختمان ها، خاکریزهای خاکی و پوشش گیاهی مسدود شود. برنامه ریزی Trimble با اجازه دادن به بخش هایی از افق به صورت دستی مشخص و از محاسبه دید حذف می شود، عملکرد پیش بینی اضافه ای را ارائه می دهد. این عملکرد ساختمان ها یا سایر سازه های عمودی را شبیه سازی می کند که ممکن است سیگنال GNSS را مسدود کند، همانطور که در شکل 1 نشان داده شده است.ب با این حال، این روش یک نقطه مرجع GNSS ثابت را در نظر می گیرد، در حالی که، در اکثر موقعیت ها، نقشه بردار متحرک است مگر اینکه از GNSS ایستا برای ایجاد کنترل زمین بررسی دائمی استفاده کند. علاوه بر این، تعیین دستی بخشهایی از افق که سیگنالهای ماهوارهای را در یک نمودار دوبعدی مسدود میکند، نیازمند تجربه برای انجام دقیق این کار است، و ارتفاع هدف باید تخمین زده شود، مگر اینکه قبلا بررسی شده باشد. امکان ذخیره تنظیمات برای یک نظرسنجی و اعمال مکرر این موانع برای آزمایشهای پیشبینی بعدی وجود دارد. با این حال، این راه حل مناسبی برای گیرنده موبایل نیست.
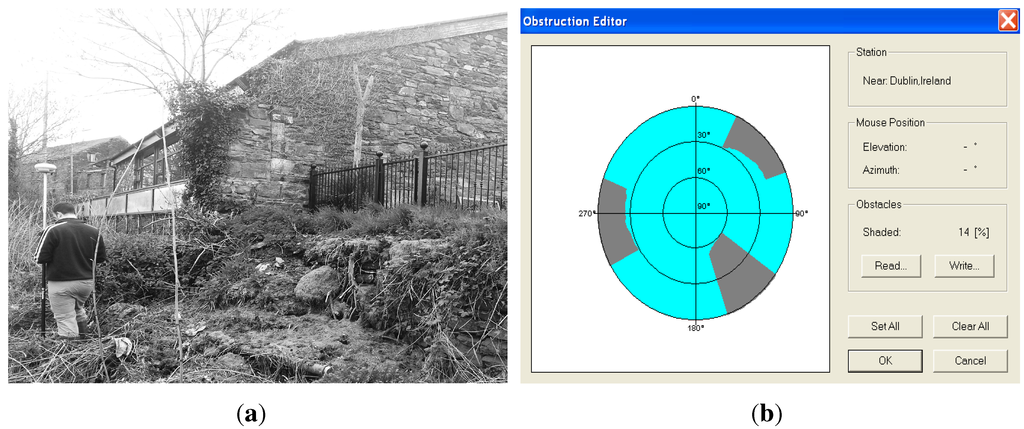
اگرچه سایههای شدید GNSS در مناطقی مانند درههای شهری باریک اجتنابناپذیر خواهد بود، روشهای پیشبینی GNSS اطلاعات مفیدی را هنگام برنامهریزی یک نظرسنجی با کمک به بهینهسازی دید ماهوارهای در مناطق شهری کمتر مشکلساز فراهم میکنند. نیاز به بهبود برنامه ریزی نظرسنجی برای کمک به گیرنده های GNSS موبایل با ظهور سیستم های نقشه برداری سیار (MMS) در حال افزایش است. نمونه ای از MMS، طراحی و توسعه یافته در مرکز ملی زمین محاسبات (NCG)، دانشگاه Maynooth، در شکل 2 نشان داده شده است.آ. MMS ها پلتفرم های نظرسنجی سیار هستند که یک منطقه را با سرعتی قابل مقایسه با ترافیک وسایل نقلیه اطراف بررسی می کنند و بنابراین اندازه گیری دید GNSS در یک منطقه مشخصاً برای یک پلت فرم بررسی سیار کاربرد محدودی دارد. روشهای پیشبینی GNSS همچنین میتوانند برای شناسایی مناطق مشکلساز قبل از بررسی استفاده شوند، بنابراین MMSها میتوانند برای به حداقل رساندن قطعی GNSS مسیریابی شوند. شکل 2 b نمودار دوبعدی مسیر یک MMS را در منطقه ای تقریباً 2 کیلومتری نشان می دهد 22. شکافهای خط سبز مربوط به مناطقی با دید کم GNSS است، چیزی که در مناطق مسکونی ساخته شده، نزدیک پوشش گیاهی بلند یا درههای شهری رایج است. علیرغم داشتن حسگرهای ناوبری جایگزین مانند واحدهای اندازهگیری اینرسی (IMU) و ابزارهای اندازهگیری فاصله (DMIs) [ 4 ] که به پر کردن شکافها در راهحل ناوبری [ 5 ] و افزایش دقت کمک میکنند، IMUها در اندازهگیری گام، چرخش و حرکت خود دچار انحراف میشوند. اوه DMI ها کیلومترسنج های درجه پیمایش هستند و می توانند این رانش را با تأیید ثابت بودن سیستم محدود کنند [ 6 ]. با این حال، کیفیت محاسبه موقعیت GNSS منبع اصلی خطاها در نظرسنجی تلفن همراه است [ 7]]. در آن مطالعه، نویسندگان نشان دادند که در مناطق با دید ماهوارهای بالا، دقت پلانسنجی ابر نقطهای حاصل از بررسی MMS بدون کنترل زمینی تقریباً 0.30 متر بود. یکی از توصیههای اصلی آن مطالعه برای مناطق دارای انسداد این بود که اپراتورها بررسی خود را مطابق با زمانهای دید بالای GNSS برنامهریزی کنند [ 7]]. بنابراین نیاز واضحی به ارائه روشی برای پیشبینی سایههای GNSS برای نظرسنجیهای موبایل وجود دارد. این مقاله نشان میدهد که چگونه یک GIS میتواند یک رویکرد جدید برای پیشبینی دید GNSS در مناطق بزرگ در چندین زمان ارائه دهد، در نتیجه بررسیهای سیار را تسهیل میکند. استفاده از نرمافزار و دادههای در دسترس، نیاز به بررسیهای زمانبر برای ایجاد مدلهای شهری با جزئیات بالا را نفی میکند و همچنین نیاز به شبیهسازیهای محاسباتی فشرده یا محاسبات مداری برای مکانیابی موقعیتهای ماهواره را از بین میبرد. این رویکرد برای برنامه ریزی نظرسنجی GNSS از طریق نوآوری های زیر با رویکردهای قبلی متفاوت است:
-
ترکیب داده های برداری 2 بعدی با داده های سه بعدی با چگالی کم برای ایجاد مدل سطح دیجیتال (DSM).
-
معکوس کردن خروجی از ابزارهای پیشبینی سایه GNSS برای محاسبه موقعیتهای شبه ماهواره.
-
بکارگیری یک نمای GIS با نقاط ناظر دور در یک سیستم مختصات متفاوت.
شکل 1. برنامه ریزی نقشه برداری GNSS ( الف ) سیگنال GNSS در طول بررسی های توپوگرافی می تواند توسط اشیاء اطراف مسدود شود ( b ) که بخش هایی از افق را در برنامه ریزی Trimble مشخص می کند که در آن موانع برای شبیه سازی ساختمان ها یا سایر سازه های عمودی وجود دارد.
شکل 2. سیستم های نقشه برداری موبایل و کیفیت GNSS ( a ) MMS XP1، طراحی و توسعه یافته در NCG ( b ) یک نمودار 2 بعدی از سیگنال ماهواره ای GNSS که از دست دادن سیگنال به دلیل انسداد در طول بررسی MMS را نشان می دهد.
2. پیشینه و کارهای مرتبط
بخشهای زیر وضعیت هنر را در سه جزء اصلی روش توصیف میکنند، اما هدف همه آنها یک هدف واحد است – پیشبینی سایه GNSS. یک روش نوآورانه با جایگزینهایی برای هر سه مؤلفه در این مقاله پیشنهاد شده است و بنابراین ساختار بحث باید بر سه چیز مورد نیاز برای پیشبینی دقیق سایههای GNSS تمرکز کند: اطلاعات مربوط به موانع موجود در منطقه، روشی برای محاسبه مکانهای ماهوارهای و یک روش. برای ارزیابی اینکه آیا سیگنال ماهواره مسدود شده است یا خیر.
2.1. انسدادهای مدلسازی
مدلهای شهر از کاربردهای متعددی مانند باستانشناسی [ 8 ]، پروژههای حملونقل [ 9 ]، مطالعات رفتار عابر پیاده [ 10 ]، مدلسازی اطلاعات ساختمان [ 11 ]، بررسیهای انتشارات حرارتی [ 12 ]، بهروزرسانی نقشه/تشخیص تغییر [ 13 ] یا دفاع در برابر سیل سود میبرند. /برنامه ریزی شهری [ 14 ]. فرمت استاندارد باز، CityGML [ 15] کیفیت های مختلف ساختار را بر اساس سطح جزئیات (LOD) تعریف می کند، رتبه ای که از 0 تا 4 می رود. LOD0 یک مدل سطح دیجیتال 2.5 بعدی (DSM) است. مدل شهری LOD1 یک مدل بلوک بدون سازه سقف است. LOD2 فرم سقف را به هر ساختمان اضافه می کند. LOD3 به طور دقیق طرح و ابعاد هر ساختمان و سقف را نشان می دهد، در حالی که LOD4 نیز فضای داخلی یا هر ساختمان را مدل می کند. هرچه مدل دقیق تر یا واقعی تر باشد، ایجاد آن بیشتر طول می کشد. این مقاله روشی را برای به حداقل رساندن زمان صرف شده برای ایجاد مدلها برای برنامهریزی نظرسنجی GNSS ارائه میکند.
2.1.1. مدلسازی با وکتورهای سه بعدی
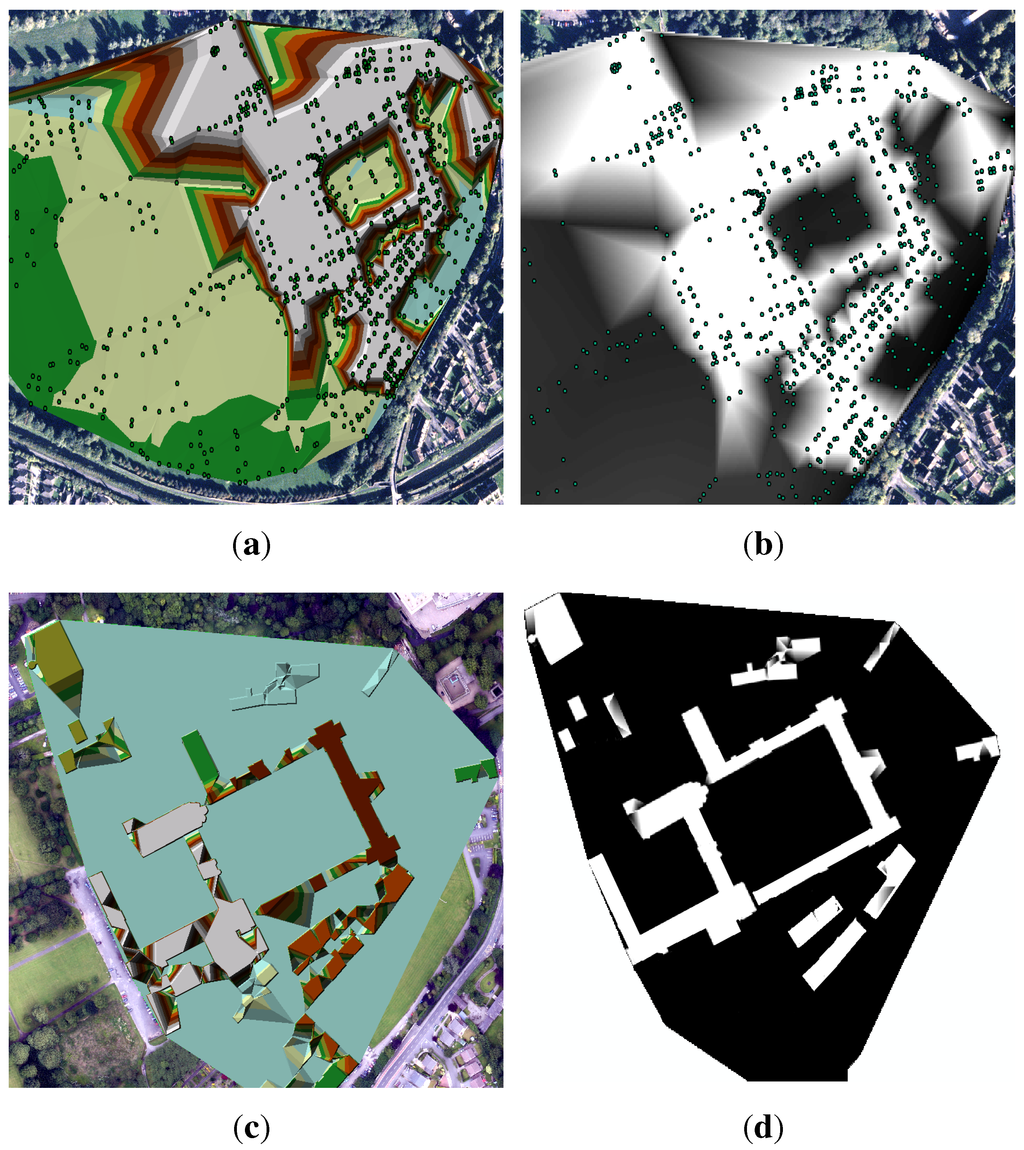
شکل 3 الف، یک مدل LOD4 را نشان می دهد که شامل فضاهای داخلی و خارجی دانشگاه Maynooth است که توسط تیمی از نقشه برداران زمین با استفاده از اسکنر لیزری زمینی ایجاد شده است. روشهای سنتی نظرسنجی مانند این [ 16 ] یا فتوگرامتری فاصله نزدیک [ 17 ] زمانبر هستند و برای اکثر شهرها به آسانی در دسترس نیستند. روشهای سریعتر بررسی مناطق شهری LiDAR هوایی [ 18 ]، LiDAR زمینی متحرک [ 19 ] یا ماهوارههای در حال گردش به دور زمین هستند. دادههای ماهوارهها را میتوان برای ایجاد مدلهای سهبعدی از مناطق شهری استفاده کرد، [ 20 ] یک رویکرد مبتنی بر شی را برای استخراج ساختمانها از تصاویر ماهوارهای با وضوح بالا با وضوح بالا که توسط صورت فلکی PLEIADES گرفته شده است، اعمال کرد. بررسی نقشه برداری ارتفاع ساختمان [21 ]، بررسی های کاداستر [ 22 ] و مطالعات تغییر شکل در مناطق شهری [ 23 ] نیز با استفاده از تداخل سنجی رادار دیافراگم مصنوعی (SAR) انجام شده است. مدل های به دست آمده به ایستگاه های کاری قدرتمند برای مشاهده یا دستکاری داده ها نیاز دارند. اولین عنصر نوآورانه رویکرد جدید که در این مقاله ارائه شده است، روشی است که از طریق ایجاد یک DSM 2.5 بعدی از نقشه برداری برداری 2 بعدی و داده های ارتفاعی کم چگالی در LOD0، نیاز به این مدل های با جزئیات بالا را دور می زند.

شکل 3. مدلسازی موانع ( الف ) یک مدل برداری سهبعدی از پردیس جنوبی دانشگاه مینوت ایجاد شده در طول پروژه پردیس سهبعدی ( ب ) یک DSM شطرنجی 2.5 بعدی از ساختمانها در پردیس شمالی دانشگاه مینوت ایجاد شده با استفاده از روشهای فتوگرامتری از تصاویر گرفته شده توسط پهپاد فالکون 8 .
2.1.2. مدلسازی با رسترهای 2.5 بعدی
اگرچه اصول فتوگرامتری اعمال شده در تصاویر گرفته شده توسط هواپیمای سرنشین دار [ 24 ] یک روش به خوبی تمرین شده برای ایجاد مدل های ساختمانی برای بررسی های پیش بینی GNSS است، همچنین می توان یک انسداد را با استفاده از یک DSM شطرنجی 2.5 بعدی (LOD0) مدل کرد. وسایل نقلیه هوایی بدون سرنشین (پهپادها) در حال حاضر یک روش شناخته شده برای ایجاد این نوع DSM هستند. شکل 3b DSM بخشی از پردیس شمالی، دانشگاه Maynooth را نشان می دهد که با استفاده از یک Octocopter Falcon 8 [ 25 ]، یک Sony Nex-5N SLR و نرم افزار Pix4Dmapper [ 26] ایجاد شده است.]. استفاده از مجموعه دادههای شطرنجی 2.5 بعدی برای نشان دادن موانع در یک منطقه، جایگزین پیچیدهتری برای مجموعه دادههای برداری سهبعدی مانند مدل پردیس است و محبوبیت پهپادها در میان نقشهبرداران برای بررسیهای توپوگرافی و ساختمان افزایش مییابد. علاوه بر این، مجموعه دادههای شطرنجی 2.5 بعدی معمولاً بسیار کوچکتر از نمونههای بردار سهبعدی خود هستند و این حجم فایل کاهش یافته امکان پردازش کارآمدتر را فراهم میکند. اگرچه شطرنجهای 2.5 بعدی برای پیشبینی سایه GNSS مناسب هستند، اما همچنان به بررسی منطقه مورد نظر و پردازش بعدی برای ایجاد DSM نیاز دارند. رویکرد پیشنهادی در این مقاله روشی برای دور زدن نیاز زمانبر بررسی هوایی با استفاده از دادههای برداری 2 بعدی و دادههای ارتفاع پایه برای ایجاد DSM 2.5 بعدی است.
2.1.3. جایگزینی پیشنهادی برای فایلهای برداری دو بعدی و دادههای سه بعدی اولیه
در مطالعات قبلی سایه GNSS، اهمیت استفاده از مدلهای انسداد دقیق و دقیق مورد تاکید قرار گرفته است. مثلا؛ مدلهای با دقت بالا برای کاهش چند مسیری در یک منطقه بررسی، بهبود راهحل ناوبری [ 27 ] با به حداقل رساندن تعداد سیگنالهای نادرست رسیده به گیرنده استفاده شد [ 28 ]. دوربینهای Fisheye و IR میتوانند برای حذف ماهوارههای نامرئی در محاسبه موقعیت، از طریق پس پردازش یا حتی در زمان واقعی استفاده شوند [ 29 ، 30 ] و این روشها مستقل از مدلهای شهری هستند. هنگامی که مدل های انسداد دقیق به کار گرفته می شوند، از طریق شبیه سازی [ 31 ] یا با بررسی [ 32 ] ایجاد می شوند . در [ 33]، شکل فایلهای چند خطی حاوی ارتفاع زمین برهنه یک فوتی، کانتورها استفاده شد و طرحها و ارتفاعات سقف و پشته ساختمان به صورت دستی دیجیتالی شد.
با این حال، با توجه به هزینه بررسی یک منطقه، پردازش دادهها و ایجاد مدلها، توجیه قوی برای توسعه روشی وجود دارد که میتواند از نقشهبرداری ملی موجود مانند Ordnance Survey Ireland (OSi) نقشه برداری دیجیتالی بردار دوبعدی و هر گونه استفاده کند. اطلاعات ارتفاعی موجود این نوع نقشه برداری برای اکثر سازمان های دولتی و سایر نهادهای عمومی در دسترس است و بنابراین منبع آماده نقشه برداری برای پیش بینی های GNSS است. یکی از اهداف این مقاله نشان دادن این است که روش پیشنهادی تبدیل نقشه برداری دوبعدی و داده های ارتفاع پایه به یک DSM شطرنجی یک جایگزین عملی برای بررسی منطقه است. داده های پایه ارتفاع را می توان از بررسی های هوایی با چگالی کم، تصاویر ماهواره ای یا موارد دیگر به دست آورد. اطلاعات مربوط به ارتفاعات ساختمانی موجود در پایگاه داده های اداره برنامه ریزی شهر یا ثبت زمین که معمولاً برای درخواست های برنامه ریزی، ثبت ملک یا درخواست های “حق نور” محفوظ است. این ترکیب از چند ضلعیهای دو بعدی و دادههای ارتفاعی پراکنده نتایج امیدوارکنندهای را هنگام اعمال در [34 ] برای تسهیل استخراج خودکار اشیاء از داده های LiDAR. روش پیشنهادی برای اجتناب از نیاز به بررسی های پرهزینه، وقت گیر و پردازش فشرده کامپیوتری استفاده خواهد شد.
2.2. مکان ماهواره ای
همانطور که قبلاً گفته شد، بستههای نرمافزاری موجود روشی را برای محاسبه دید ماهوارهای در یک مکان، در هر زمان ارائه میدهند و این نرمافزار اطلاعات دقیقی در مورد اطلاعات مداری ماهوارههای GNSS ارائه میدهد. روش دیگر برای برنامهریزی پیمایش، طراحی برنامهای است که بتواند موقعیتهای ماهوارهای را در همه زمانها ردیابی کند، مانند برنامههایی که از یک مجموعه عناصر دو خطی (که مدارهای ماهوارههای مدار زمین را توصیف میکند) که توسط [33] یا پارامترهای کپلین پیشنهاد شده است، استفاده میکند . در ماژول GRASS استفاده شده توسط [ 35 ] استفاده می شود. این روش ها از نظر عملکرد محاسباتی سنگین هستند، اما اطلاعات لحظه ای در مورد موقعیت ماهواره را در اختیار کاربر قرار می دهند. یک جایگزین استفاده از یک صورت فلکی GNSS شبیه سازی شده است، مانند آنچه که توسط [ 31] به کار گرفته شده است، 36 ]. روش ابتکاری پیشنهاد شده در این مقاله از نرم افزار برنامه ریزی آزادانه در دسترس مانند Trimble Planning استفاده می کند و سپس خروجی الگوریتم پیش بینی ماهواره را معکوس می کند. روش پیشنهادی به جای محاسبه تعداد ماهوارههای قابل مشاهده در گیرنده، موقعیت پسودو را برای ماهواره محاسبه میکند در حالی که به طور همزمان ارتفاع و آزیموت صحیح آن را حفظ میکند. این رویکرد از طریق یک ویرایشگر اصلی HTML، خروجی برنامه دسکتاپ Trimble Planning فعال می شود و از نظر زمان پردازش صرفه جویی می کند.
2.3. محاسبه دید در GIS
برنامههای کاربردی خاصی از سایههای GNSS سود میبرند، برای مثال، [ 31 ، 32 ] پیشبینی میکنند که چه ماهوارههایی نباید از مکانهای مختلف قابل مشاهده باشند و سپس از این سایهها برای محاسبه موقعیت گیرنده در طول بررسی استفاده میکنند. با این حال، هدف این مقاله کمک به نقشهبردار در اجتناب از سایههای GNSS هنگام برنامهریزی نظرسنجی، بهویژه برای بررسیهای موبایلی است. در این مطالعه از GIS برای کمک به محاسبه دید ماهواره ای استفاده شده است.
استفاده از GIS برای مدلسازی خط دید/مسیر مفهوم جدیدی نیست، زیرا این قابلیت برای بسیاری از کاربردها از جمله باستانشناسی [ 37 ]، تحلیل مسیر کمهزینه [ 38 ] و رهگیری تابش خورشیدی [ 39 ] استفاده شده است . یکی از روش ها استفاده از ابزار ArcMap خط دید (LOS) است. ابزار LOS مستلزم این است که دو نقطه را در یک خط مشخص کنید، اولین و آخرین راس. یکی ناظر است، یکی هدف است و سپس دید از طریق ردیابی پرتو محاسبه می شود (روشی که اخیراً در مطالعه ای برای دید ماهواره ای با استفاده از Google Earth [ 40 ] استفاده شده است). محاسبه سایههای GNSS در یک منطقه وسیع مستلزم مدلسازی هر ماهواره و محاسبه خط دید برای هر موقعیت نقشهبردار ممکن در منطقه است. که در [18 ]، نویسندگان سیستمی را طراحی کردند که تمام محدوده ماهواره ای GNSS را در بر می گرفت، از LiDAR هوابرد برای ایجاد یک مدل شهر سه بعدی از یک شهر و ابزار تحلیلگر 3D Line of Sight برای محاسبه دید استفاده کردند. [ 24 ] در کار خود بر روی دید ماهواره ای، ابزار 3D Analyst Line of Sight را نیز اعمال کردند. در [ 35 ]، نویسندگان ماژول های r.obstruction و r.planning.static را در GRASS برای کار خود بر روی برنامه ریزی GNSS به کار بردند.
برای بهبود این موضوع، عنصر جدید نهایی روش پیشنهادی، اعمال الگوریتم viewshed از ESRI ArcMap است، در نتیجه نیاز برای هر ناظر/نقطه هدف مشخص شده را نفی میکند. یک viewshed هر سلول هدف را به صورت شطرنجی محاسبه میکند که میتواند از مکانهای رصدی متعدد، که در این مورد ماهوارهها هستند، مشاهده شود. سپس هر پیکسل در تصویر خروجی مقداری را ذخیره می کند که چند نقطه ناظر را می توان از آن موقعیت دید. در [ 33]، نویسندگان تاکید کردند که محدودیت اصلی ابزار ArcMap viewshed که از استفاده از آن برای پیشبینی دید ماهوارهای جلوگیری میکند این است که نقاط ناظر (ماهوارهها) نمیتوانند هزاران کیلومتر از منطقه آزمایشی و در یک سیستم مختصات متفاوت فاصله داشته باشند. روش جدید ارائه شده در این مقاله برای استفاده از موقعیت شبه ماهواره ای ایجاد شده از یاتاقان و آزیموت واقعی، دور زدن این محدودیت ها را امکان پذیر می کند.
3. مجموعه داده ها
در این مطالعه از چهار مجموعه داده استفاده شد. اینها سالنامه های GNSS گنجانده شده در Trimble Planning، یک مدل سه بعدی از پردیس جنوبی دانشگاه Maynooth بود که با یک اسکنر لیزری زمینی ایجاد شد (اما فقط به عنوان منبع موجود مقادیر ارتفاعی فردی برای ساختمان های دانشگاه استفاده می شود)، نقشه برداری OSi و داده های بررسی توپوگرافی. با یک گیرنده GNSS که در تست های اعتبار سنجی استفاده شد، گرفته شده است.
3.1. نرم افزار GNSS Almanac/Trimble
اطلاعات دقیق برای موقعیت های ماهواره ای در ساعات مختلف روز مورد نیاز بود. همانطور که قبلاً نشان داده شد، تعدادی روش مختلف وجود دارد که مدار را دقیقاً شرح می دهد. اگر به روز نگه داشته شوند، این ابزارهای نرم افزاری می توانند برای محاسبه موقعیت هر ماهواره GNSS در هر زمانی از روز استفاده شوند. با این حال، این یک فرآیند پیچیده از نظر آموزش کاربر و همچنین از نظر زمان پردازش است. یکی از اهداف این مطالعه نشان دادن این بود که یک بسته نرم افزاری رایگان GNSS موجود، جایگزین مناسبی است که از نظر هزینه و زمان صرفه جویی می کند. برنامه ریزی Trimble به راحتی در دسترس بود. بنابراین، این روش می تواند با سهولت بیشتری بازتولید شود و بنابراین برای پروژه انتخاب شد.
3.2. نقشه برداری دیجیتال OSi
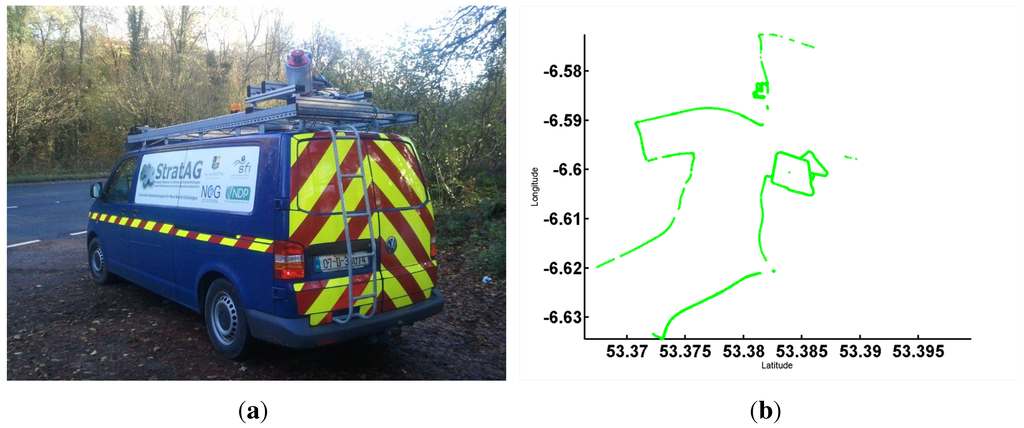
یک مثال معمولی از نقشه برداری برداری مانند نگاشت دیجیتال OSi دانشگاه Maynooth ( شکل 4 a) روشی سریع برای دستیابی به چند ضلعی های ردپای ساختمان را برای هر کاربر بالقوه ای فراهم می کند و در این پروژه گنجانده شده است. نقشه برداری برداری با استفاده از MicroStation V8 بنتلی [ 41 ]، یک محیط CAD محبوب ویرایش شد. برای این پروژه، تمام لایه های نقشه برداری (به عنوان مثال، آب، زیرساخت، مرزهای قانونی) به استثنای ردپاهای ساختمان حذف شدند، همانطور که در شکل 4 نشان داده شده است.ب جایی که تک لایه ساختمان جدا شده است. اگر این فرآیند به یک منطقه بزرگتر شامل صدها کاشی نگاشت دیجیتال گسترش یابد، این فرآیند می تواند با مشخص کردن یک لایه و اجرای یک فرآیند دسته ای برای استخراج لایه مربوطه ساده شود. این چند ضلعیهای ساختمانی از عکسبرداری هوایی ایجاد شدهاند و دقت نقلشده تقریباً 0.60 ± متر دارند [ 42 ].
شکل 4. نقشه برداری 2 بعدی برداری ایرلند بررسی مهمات ( الف ) همه لایه های فعال در منطقه آزمایشی که در محیط CAD مشاهده می شوند ( b ) لایه ردپای ساختمان ایزوله شده برای مدل سازی انسداد.
3.3. پردیس سه بعدی
این دادههای پیمایشی با چگالی بسیار بالا و دقت بالا با استفاده از HDS3000 لایکا گرفته شد و با استفاده از سیکلون لایکا [ 43 ] و استودیوی سهبعدی اتودسک [ 44 ] گردآوری شد. 3D Studio یک پکیج حرفه ای مدل سازی سه بعدی است که برای برخورد با حجم زیاد نقاط استفاده می شود و کیفیت بالای مدل ها در شکل 3 الف قابل مشاهده است. همانطور که ما روش جایگزین استفاده از دادههای برداری OSi 2D را پیشنهاد میکنیم، مدل سهبعدی پردیس برای مدلسازی موانع استفاده نشد، بلکه صرفاً برای تعیین یک مقدار ارتفاع منفرد و دقیق برای ردپا و سقف هر چند ضلعی ساختمان دو بعدی استفاده شد. مقادیر تک ارتفاع برای تکرار یک ابر نقطه هوایی LIDAR و دیگر مجموعه دادهها یا مقادیر کم چگالی از یک پایگاه داده موجود استفاده شد.
3.4. داده های نظرسنجی Trimble R8 GNSS
یک گیرنده GNSS Trimble R8 [ 45 ] در تست های اعتبارسنجی در این مقاله استفاده شد. R8 یک مریخ نورد GNSS درجه پیمایش است و قادر است موقعیت را بر اساس سیگنال های صورت فلکی GPS و GLONASS محاسبه کند. گیرنده هایی که می توانند سیگنال های چند صورت فلکی را ضبط کنند، تعداد ماهواره های موجود برای نقشه بردار را در هر زمانی از روز افزایش می دهند. گیرنده در چندین مکان در اطراف پردیس جنوبی دانشگاه Maynooth برای آزمایشهای دقت قرار گرفت. یک bi-pod برای به حداقل رساندن هرگونه حرکت گیرنده در طول اندازهگیریهای اعتبارسنجی استفاده شد. رابط کاربری در دیتالاگر تعداد ماهوارههای قابل مشاهده برای گیرنده را در زمان فعلی نمایش میدهد و از این برای اعتبارسنجی نتایج پیشبینی استفاده میشود.
4. روش شناسی
این مطالعه شامل پنج مرحله مجزا بود. اولین مورد محاسبه موقعیت ماهواره بر روی دانشگاه Maynooth بود، دومی شامل استخراج چند ضلعی های دوبعدی پردیس و به دنبال آن ایجاد یک مدل سطحی از محوطه دانشگاه بود. در مرحله چهارم، توابع 3D Analyst viewshed برای اطمینان از قابلیت مشاهده اعمال شد و در مرحله نهایی، صحت نتایج پیشبینی مورد ارزیابی قرار گرفت.
4.1. محاسبه موقعیت های ماهواره
برای بررسی های دقیق پیش بینی ماهواره ای ضروری است که موقعیت ماهواره های GNSS در هر صورت فلکی را بتوان همیشه محاسبه کرد. دادههای ephemeris ماهوارهای (شامل دادههای موقعیتی، اطلاعات مداری و سلامت ماهواره) در سالنامه پخش میشود و قابل دانلود است. گاهی اوقات، تنظیماتی در مدارهای ماهواره ای انجام می شود، بنابراین این سالنامه ها باید به روز شوند. نکته مهم برای روش پیشنهادی، نرمافزاری مانند Trimble Planning نیز اطلاعاتی در مورد آزیموت و ارتفاع هر ماهواره از یک نقطه ناظر شناختهشده در نتایج پیشبینی فراهم میکند.46 ]، مرکاتور عرضی ایرلندی (ITM). برای اطمینان از اینکه ماهواره های شبیه سازی شده خیلی نزدیک به محل بررسی نیستند (که به این معنی است که میدان دید اغراق آمیزی دارند)، آنها در فاصله 10 کیلومتری از محوطه دانشگاه شبیه سازی شدند. این مقدار شبیه سازی شده در محاسبه مختصات شبیه سازی شده مورد نیاز بود. با توسعه روشی که شامل یک فاصله کاذب کوتاهتر از فاصله واقعی است، به ما امکان میدهد از محدودیتهای نمای شناسایی شده توسط [ 33 ] اجتناب کنیم.
برای تست های اولیه یک روز برای مطالعه انتخاب شد و زمان آزمون بین ساعت 10:00 تا 17:00 محدود شد. یک نقطه واحد در مرکز پردیس انتخاب شد و جدولی از تمام ماهوارههای مرئی و ارتفاعات و آزیموتهای آنها در فواصل ده دقیقهای از ساعت 10:00 تا 17:00 ایجاد شد ( شکل 5 الف). در این تصویر، اعداد جدول زیر هر شناسه ماهواره به ارتفاع (همیشه کمتر از 90) اشاره دارد. ∘∘) و آزیموت (بین 0 ∘∘و 360 ∘∘). یکی از مشکلات این فرآیند این است که نرم افزار Trimble Planning تنها اجازه می دهد که طول و عرض جغرافیایی نقطه ناظر به جای درجه، دقیقه و ثانیه به درجه و دقیقه مشخص شود. این امر دقت را هنگام تعیین موقعیت نقطه ناظر کاهش می دهد، اما برنامه ریزی بررسی های GNSS به دقت بالایی در تعیین موقعیت نقطه ناظر واحد نیاز ندارد و تنها زمانی بر نتیجه تأثیر می گذارد که نقطه نزدیک به انتقال بین دو دقیقه باشد (به عنوان مثال ، در 59 ثانیه

شکل 5. محاسبه موقعیت های ماهواره ای ( الف ) نتایج پیش بینی از برنامه ریزی Trimble برای فواصل 10 دقیقه ای در محل آزمایش ( ب ) یک نمودار 2 بعدی از موقعیت های شبه ماهواره در فواصل 10 دقیقه در دانشگاه مینوث بین ساعت 10:00 و 17:00.
داده ها به فرمت HTML صادر شده و سپس با استفاده از یک ویرایشگر HTML قابل دسترسی و ویرایش هستند. فرمول های هندسی برای تبدیل مختصات X، Y و Z به ترتیب به موقعیت های شبه X’، Y’ و Z’ با توجه به 10 کیلومتر برد شبیه سازی شده ( s ) و آزیموت اندازه گیری شده ( θ ) و ارتفاع ( φ ) محاسبه شده توسط Trimble Planning
ایکس“= s ( cos φ × sin θ )�′=�(cos�×sin�)
Y“= s ( cos φ × cos θ )�′=�(cos�×cos�)
و
ز“= s ( گناه ϕ )�′=�(sin�)
این داده ها در یک جدول جمع آوری شده و به ArcMap وارد شدند. یک پرس و جوی SQL، ماهواره های موجود در هر زمانی از روز را قادر می سازد تا برای تجزیه و تحلیل در GIS شناسایی، جداسازی و تجسم شوند. شکل 5 b نمودار دوبعدی تمام ماهوارههای صورت فلکی GNSS را نشان میدهد که در روز چهارشنبه، 4 مه بین ساعت 10:00 و 17:00 در ArcMap در دانشگاه Maynooth حضور داشتند.
4.2. استخراج چند ضلعی های ساختمان بردار دو بعدی
مجموعه داده های جمع آوری شده در ابتدا به عنوان یک راه حل مقرون به صرفه برای ارائه چند ضلعی های دو بعدی مورد بررسی قرار گرفتند. برای مثال، در صورتی که دقت کافی باشد، میتوان از چند ضلعیهای ساختمانی نقشه خیابان باز (OSM) استفاده کرد. با این حال، مطالعات [ 47] نشان داده اند که میانگین خطای بین OSM و داده های مرجع دقیق 6.65 متر و حداکثر خطا می تواند تا 31 متر باشد. این دقت به وضوح برای بررسی های پیش بینی GNSS کافی نیست و بنابراین نقشه دیجیتال OSi برای نشان دادن روش انتخاب شد. اگرچه تحت مجوز استفاده می شود و بنابراین هزینه ای در بر دارد، مجموعه داده های برداری مانند این ها منبع محبوب و دقیقی برای نقشه برداری در بسیاری از کشورها هستند، خواه برای نقشه برداری مرز ثابت، نقشه کاداستر با دقت بالا (آلمان، دانمارک) یا غیر طراحی شده باشند. سیستم های ثبت مرزی قطعی مانند ایرلند [ 48 ].
استفاده از نقشههای موجود از نیاز به پیگیری فرآیند زمانبر دیجیتالی کردن هر ساختمان از روی تصاویر شطرنجی یا انجام یک بررسی توپوگرافی یا هوایی جلوگیری میکند. تمام ویژگیها به جز ساختمانها حذف شدند و چند ضلعیهای دوبعدی روی لایه ساختمان به ArcMap وارد شدند. یکی از مسائل مربوط به استفاده از چند ضلعی های ساختمان این بود که درختان، مبلمان خیابان و سایر زیرساخت ها گنجانده نشده بودند. درختان عامل مهمی در پیشبینی GNSS هستند زیرا سیگنالهای ماهوارهای را مسدود میکنند، بهویژه در بهار یا تابستان که تاج پوشش گیاهی ضخیمتر میشود، با این حال بررسی و دیجیتالی کردن هر درخت در محوطه دانشگاه بسیار زمانبر خواهد بود و این یک هدف مهم پیشنهادی بود. روش شناسی برای جلوگیری از نیاز به پیش نقشه برداری یک منطقه.
4.3. پردیس Raster 2.5D ایجاد کنید
تعدادی از مراحل برای ایجاد یک مدل سطح شطرنجی 2.5 بعدی از ساختمان ها در محوطه دانشگاه برای استفاده در محاسبات نمای دید درگیر شد. ابتدا به هر یک از پلیون های ساختمانی دوبعدی مقادیر ارتفاع اختصاص داده شد. با استفاده از ابزار ArcMap “feature to ascii”، مقادیر XY برای هر یک از رئوس چند ضلعی ( شکل 6 a) به یک جدول صادر شد و یک مقدار Z واحد از مدل پردیس سه بعدی به هر رأس یک چند ضلعی ساختمان اختصاص داده شد. همانطور که قبلا توضیح داده شد، با نشان دادن اینکه ترکیب دادههای برداری دوبعدی با یک مقدار ارتفاع واحد برای هر ساختمان، جایگزین مناسبی برای یک مدل سهبعدی با چگالی بالا است، میتواند به طور بالقوه در زمان بررسی، زمان پردازش و هزینه صرفهجویی کند.
سپس از این نقاط برای ایجاد یک شبکه نامنظم مثلثی (TIN) استفاده شد، زیرا این اولین گام در ایجاد یک DSM شطرنجی برای استفاده در محاسبه دید در ArcMap است. فرآیند TIN به تمام نقاط XYZ مجاور در شبکهای از مثلثهای غیر همپوشانی میپیوندد، اما زمانی که نقاط روی هم قرار گیرند (یعنی مختصات XY یکسان اما مختصات Z متفاوت) و به همین دلیل کوتاه، 1 متر مشکل دارد. افست ( شکل 6 ب) برای هر ردپای ساختمان گنجانده شد. هنگامی که مقادیر XYZ برای هر راس چند ضلعی یافت شد، چند ضلعی های اصلی و چند ضلعی افست با هم ترکیب شدند تا TIN ایجاد شود. مشکلی که در صورت حذف افست ارائه میشود، زمانی آشکار میشود که TIN ( شکل 7).الف) و DSMهای شطرنجی حاصل ایجاد شدند ( شکل 7 ب) زیرا حداقل تغییرات ارتفاعی بین اکثر سطوح وجود داشت. با این حال، پس از اعمال بافر 1 متری، این به یک TIN بسیار بهبود یافته برای ساختمانهای دانشگاه منجر شد ( شکل 7 ج) اگرچه مناطق مشکلزای خاصی همچنان وجود داشتند که به دلیل مشکلات مربوط به جابجایی ردپای ساختمان است که به موجب آن ساختمان بزرگتر از آن علامتگذاری میشود. باید باشد. ویرایش اولیه مثلث های مشکل ساز اجازه ایجاد یک DSM شطرنجی بهبود یافته را می دهد ( شکل 7د) و این DSM شطرنجی 2.5 بعدی که با استفاده از دادههای برداری دوبعدی و اطلاعات پایه ارتفاع ایجاد شده است، برای مدلسازی موانع در محاسبات دیدگاه استفاده شد. آزمایش با فواصل مختلف بافر می تواند ایجاد DSM را بهبود بخشد و در صورت ارتقاء مقیاس به مناطق آزمایشی بزرگتر، به کاربردهای آینده این روش کمک کند.
شکل 6. پردازش چند ضلعی های برداری 2 بعدی ( a ) با شناسایی مختصات X,Y هر رأس چند ضلعی ساختمان ( b ) با اعمال یک افست 1 متری به چند ضلعی ها برای کمک به ایجاد شبکه نامنظم مثلثی.
4.4. 3D Analyst Viewshed GIS Calculation
ابزار ArcMap viewshed دید را از یک نقطه ناظر (در این مورد ماهواره ها) به یک سطح (DSM شطرنجی دانشگاه) محاسبه می کند. یک محدودیت این است که اشیاء باید در یک سیستم مختصات باشند. با این حال، روش جدید محاسبه موقعیت های شبه ماهواره ای پیشنهاد شده در این مقاله، کاربرد آن را ممکن کرده است. اگرچه ابزار viewshed میتواند انحنای زمین را در بر بگیرد، اما ماهوارههای قابل مشاهده برای نقشهبر همگی بالای افق خواهند بود و از آنجایی که هیچ DSM برای مناطق خارج از محوطه دانشگاه استفاده نشده است، همه موقعیتها را میتوان نسبت به صفحه محلی در نظر گرفت. اولین فیلد مورد نیاز در ابزار viewshed، SPOT ( شکل 8) ارتفاع نقطه ناظر را دیکته می کند. در این مورد، SPOT به عنوان مقدار Z شبه ماهواره، Z’ تنظیم شد. سایر فیلدهای اختیاری OFFSETA و OFFSETB بودند. OFFSETA را می توان هنگام مدل سازی دید مزارع بادی، دکل های رادیویی یا سازه های عمودی مشابه به کار برد زیرا اجازه می دهد یک مقدار ارتفاع برای سازه تعریف شود. OFFSETA روی مقدار کم دلخواه 1 متر تنظیم شد. OFFSETB اجازه می دهد تا یک ارتفاع عمودی منفی تعریف شود و مورد نیاز نیست، بنابراین OFFSETB خالی گذاشته شد. فیلدهای اختیاری اضافی AZIMUTH، VERT، RADIUS و YY گنجانده نشدند، زیرا اینها فقط زمانی مورد نیاز هستند که میدان دید یا محدوده دید نقاط ناظر محدود شود. در این مطالعه، اینطور نبود و با حذف این فیلدها، مقدار حداکثر، یعنی 0 را به طور پیش فرض در نظر گرفت.∘∘-360 ∘∘جستجو در آزیموت و عمودی محدوده نامحدود. در صورت تلاش برای افزایش زمان پردازش در آزمایشهای آینده، این امر میتواند با حذف تمام اجسام بالای ماهواره محقق شود. تعیین زمانی از روز که رویت ماهواره بر پردیس Maynooth با استفاده از یک دستور SQL انجام شد. پس از این، سطح انسداد اعمال شد و نمای دید محاسبه شد. اگرچه معمولاً پنج ماهواره برای اکثر گیرنده های ماهواره ای در حالت RTK مورد نیاز است، چهار ماهواره حداقل ریاضی است و این به عنوان برش کمتر برای این آزمایش ها اعمال شد. این دو کلاس جواب بله/خیر قطعی برای دید ماهواره ای دادند.
شکل 7. ایجاد سطوح برای مدلسازی موانع ( الف ) TIN بدون افست 1 متری، تعریف ضعیفی از تغییرات ارتفاع را نشان میدهد ( ب ) DSM شطرنجی با کیفیت پایین ایجاد شده با استفاده از TIN بدون افست 1 متر ( ج ) آفست 1 متر باعث بهبود TIN ( d ) میشود. TIN بهبود یافته منجر به DSM شطرنجی بهبود یافته می شود.
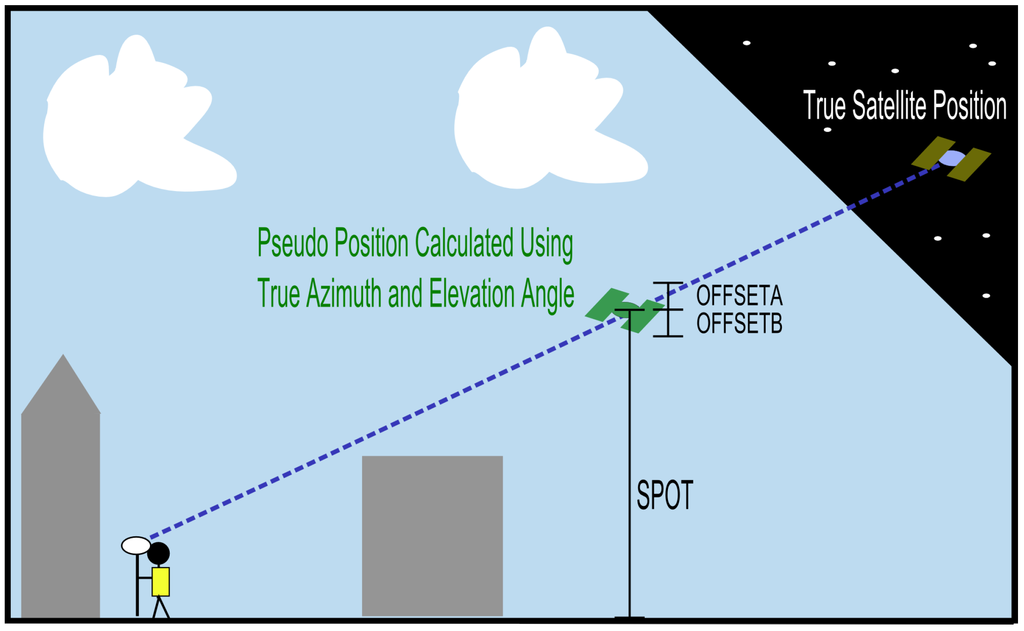
شکل 8. ایجاد یک نقطه ناظر دید با استفاده از موقعیت شبه ماهواره.
5. نتایج و بحث
بخشهای زیر نتایج روششناسی پیشبینی GNSS را ارائه میکنند. علاوه بر این، رویهای برای اعتبارسنجی این پیشبینیها با استفاده از مقادیر واقعی طراحی شد. یک گیرنده GNSS برای اندازهگیری تعداد ماهوارههای قابل مشاهده در تعدادی از مکانهای مجزا در محوطه دانشگاه Maynooth استفاده شد و این دادههای اعتبارسنجی سپس با مقادیر پیشبینیشده مقایسه شد و منابع خطا بررسی شدند. این ارزیابی روش پیشنهادی استفاده از نرمافزار پیشبینی موجود، چند ضلعیهای دوبعدی و دادههای ارتفاعی کم چگالی را در تحلیل دیدگاه آرک مپ امکانپذیر کرد.
5.1. تفسیر نتایج پیشبینی GNSS
نتایج تجزیه و تحلیل دیدگاه برای یک نقطه زمانی در دانشگاه مینوت در شکل 9 نشان داده شده است.آ. این تصویر خروجی روش دید ماهواره ای پیشنهادی را پس از گنجاندن موانع نشان می دهد. چند ضلعی های برداری دوبعدی نشان دهنده ردپای ساختمان به عنوان کمکی برای تجسم این موانع در هنگام تفسیر نتایج گنجانده شده است. مناطق به رنگ سبز نشان دهنده مناطق چهار ماهواره یا بیشتر هستند در حالی که مناطق قرمز مناطقی هستند که برای کمتر از چهار ماهواره قابل مشاهده هستند، به این معنی که یک گیرنده GNSS قادر به محاسبه موقعیت سه بعدی دقیق در آن مکان نیست. پس از بررسی نتایج، روند بسیار قطعی به سمت سایههای GNSS در جنوب و جنوب شرقی ساختمانها آشکار شد، با ساختمانهای بلند که سایههای طولانیتری نسبت به ساختمانهای کوچکتر نشان میدهند. این روند کلی در توزیع سایه حاکی از آن است که صورت فلکی ماهواره در زمان بررسی عمدتاً در شمال و شمال غربی بوده است. این فرض زمانی تأیید شد که نموداری از آزیموت ماهواره در سراسر آزمایشهای پیشبینی ایجاد شد.شکل 9 ب)، با اکثریت مدارهای ماهواره GNSS از ربع آزیموت 270 قابل مشاهده است. ∘∘-350 ∘∘. مقادیر روی محور Y نشاندهنده تعداد کل اندازهگیریهای ماهوارهای است که در آن آزیموت در طول آزمایشها ثبت شده است – برای مثال، 141 موقعیت ماهواره در طول آزمایشها ثبت شد و تقریباً 95 مورد از آن مشاهدات در سمتهای 270 قرار گرفتند. ∘∘-350 ∘∘از موقعیت ناظر بررسی اولیه سایهها در ناحیه آزمایش نشان میدهد که این روش با موفقیت موانع موجود در منطقه را مدلسازی کرده است:
-
سایه بلند و باریک در جنوب حیاط مرکزی در نتایج پیشبینی ناشی از مناره بلند کلیسای جامع در محوطه دانشگاه است که بیش از 80 متر ارتفاع دارد.
-
مناطقی از حیاطهای کوچکتر تقریباً بهطور کامل در سایه بودند، به این معنی که اگر نقشهبردار در آن منطقه کار میکرد، دریافت سیگنال GNSS، همانطور که در زندگی واقعی انتظار میرود، بسیار دشوار خواهد بود.
شناسایی علت و شکل سایر سایههای GNSS، مانند سایه بلند و باریک در شمال غربی نقشه، دشوارتر بود:
-
این سایه به طور بالقوه توسط ماهواره ای در جنوب غربی منطقه ایجاد شده است که سایه نزدیک به ساختمان را از بین می برد یا ماهواره ای در ارتفاعات افق در شمال غربی که قادر به مشاهده بخشی از نمای جنوبی ساختمان بود و در نتیجه بقیه را از بین می برد. سایه در این منطقه شکل 9 ب ثابت می کند که در طول بررسی، ماهواره هایی در جنوب غربی وجود داشته است.
-
از طرف دیگر، ممکن است در TIN خطایی در این ناحیه وجود داشته باشد، زیرا این ساختمان یک پسوند مثلثی را در شکل 7 ج نشان می دهد. با این حال، این در DSM شطرنجی حاصل آشکار نبود، بنابراین علت نهایی نامشخص است.
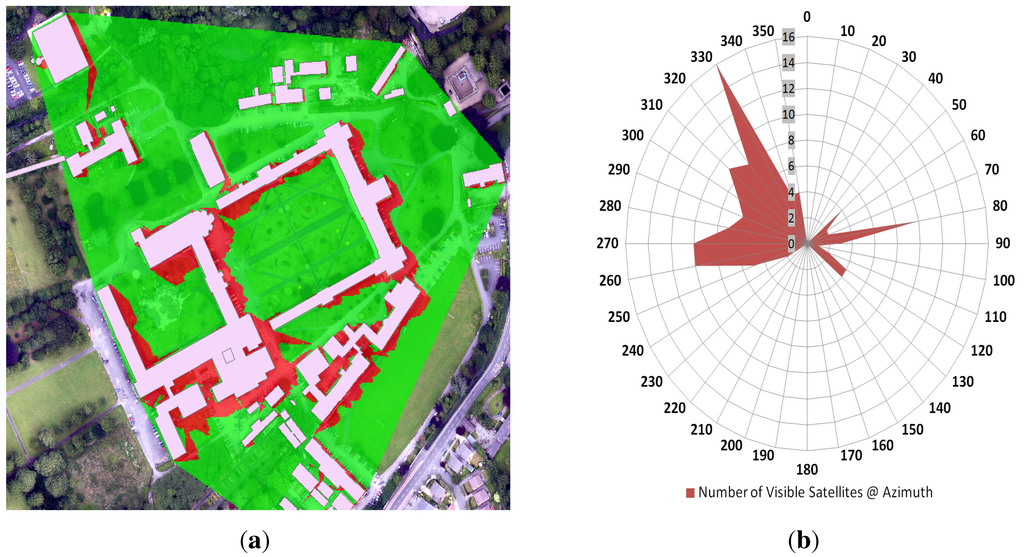
شکل 9. نتایج و آزمونهای دقت ( الف ) تجسم خروجی از روش پیشنهادی – مناطق سبز: قابل مشاهده برای چهار ماهواره بعلاوه، قرمز: کمتر از چهار ماهواره ( ب ) نموداری از آزیموتهای ماهواره در سراسر آزمایشهای اعتبارسنجی – قرمز نشاندهنده سمت و عدد است. از ماهواره ها، اعداد خاکستری در محور Y نشان دهنده تعداد کل ماهواره های قابل مشاهده از محل ناظر در طول آزمایش است.
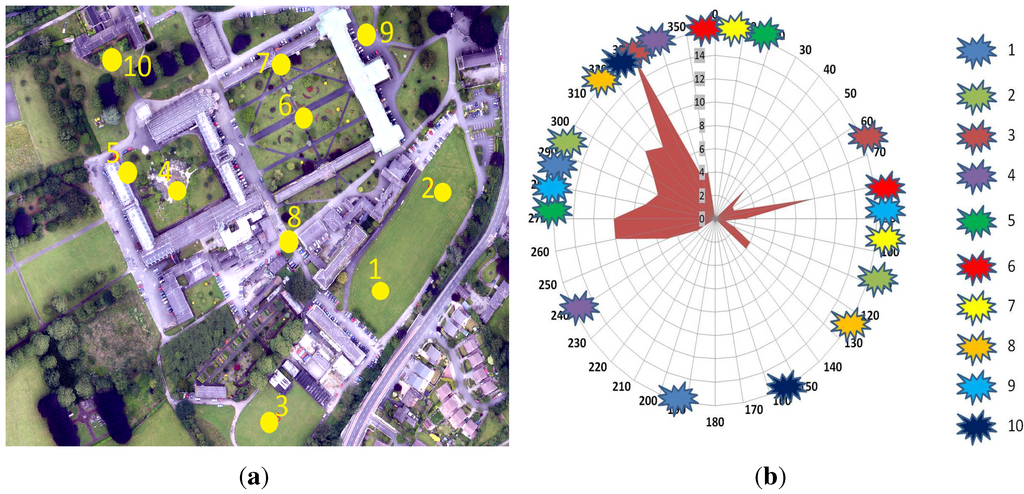
شکل 10. آزمونهای اعتبارسنجی ( الف ) نقاط اعتبارسنجی انتخاب شده به عنوان نماینده محیط اطراف ( ب ) آزیموت دو شی سایهدار غالب در طول آزمایشهای اعتبارسنجی در هر یک از ده مکان آزمایشی.
5.2. انتخاب مکانهای نمونه GNSS
برای ارزیابی دقت روش پیشبینی سایه GNSS، تمام ماهوارههای قابل مشاهده با گیرنده GNSS Trimble R8 در زمانها و مکانهای مختلف در محوطه دانشگاه شمارش شدند. تعدادی از نقاط معرف برای اطمینان از سایه گرفتن گیرنده در حداقل یک ربع برای هر آزمون انتخاب شدند. شکل 10 a مکان های انتخاب شده برای تست های اعتبار سنجی را نشان می دهد. مکان هایی مانند یک فضای باز، یک حیاط، یک مسیر دسترسی باریک بین دو ساختمان و چهار نقطه مجاور با موانع بزرگ به سمت شمال، شرق و غرب انتخاب شدند. شکل 10 ب به صورت گرافیکی، آزیموت دو منبع سایه غالب را برای هر نقطه چک با شماره 1-10 نشان می دهد و اینها با مکان های آزمایش مشخص شده در شکل 10 منطبق هستند.آ. یک عامل محدود کننده اضافی در هنگام انتخاب مکانهای نمونهبرداری، پوشش گیاهی بود. از آنجایی که پوشش گیاهی در این تکرار روش گنجانده نشده بود، در صورت امکان از مکان هایی با مقادیر زیادی پوشش گیاهی اجتناب شد. پوشش گیاهی عمدتاً در غرب پردیس قرار داشت همانطور که در شکل 10 الف نشان داده شده است.
5.3. اعتبار سنجی روش
با توجه به نیاز به اعتبار سنجی دستی در هر مکان، این آزمایش ها را نمی توان به طور همزمان با یک گیرنده انجام داد و بنابراین تعداد ماهواره ها در طول آزمایش ها تغییر کرد. محاسبه دید ماهواره ای به طور مکرر به روز شد تا همزمان با هر ایست بازرسی ثبت شده باشد. جدول 1 اصطلاحات مورد استفاده در اعتبار سنجی و تجزیه و تحلیل را فهرست می کند.

جدول 1. اصطلاحات آزمون اعتبارسنجی پیش بینی سیستم ماهواره ای ناوبری جهانی (GNSS).
با مقایسه حداکثر، تعداد پیشبینیشده و مشاهدهشده ماهوارههای قابل مشاهده در هر مکان، نتایج امیدوارکننده به نظر میرسد که روششناسی را تأیید میکند. جدول 2 این نتایج را نشان می دهد. بزرگترین اختلاف بین پr e dمن c t eدobsپ�هدمنجتیهدobsو مe a s u r eدobsمهآستو�هدobsپیشبینی بیش از حد دو ماهواره در نقطه 3 بود. خیابانی از درختان بزرگ در باغ دیواری در شمال غربی این مکان آزمایشی و خیابان دیگری از درختان بزرگ که مرز دانشگاه را به سمت شرق میپوشانند وجود دارد. فقدان پوشش گیاهی در مدل باعث ایجاد خطا در این نمونه پیش بینی شده است. در شش محل از ده محل آزمون (نقاط 4، 5، 6، 7، 8 و 10) پr e dمن c t eدobsپ�هدمنجتیهدobsمقدار با اعتبارسنجی یکسان بود، مe a s u r eدobsمهآستو�هدobsیعنی روش پیشنهادی برای 60 درصد تست ها خطای صفر را برگردانده است . نتایج به دست آمده از نقاط 5، 7 و 10 به ویژه امیدوارکننده است زیرا همه آنها در مجاورت یک ساختمان بلند قرار داشتند و بنابراین دید GNSS به شدت محدود شده بودند.
جدول 3 خطا در پیشبینی و آزیموت دو منبع سایه غالب برای هر نقطه، محدوده آن موانع و ارتفاع هر مانع را فهرست میکند (همچنین به صورت گرافیکی در شکل 10 ب نشان داده شده است). هر انسداد نیز در جدول 3 مشخص شده است . تعداد صحیح ماهواره ها در 5، 7 و 10 زمانی محاسبه شد که برد ساختمان بین 2 متر و 5.6 متر متغیر بود و همچنین در نقطه 8 که در محل اتصال بین ساختمان های بزرگ قرار داشت محاسبه شد. پیشبینی دقیق دید GNSS در مناطق مشکلزا مانند این نشان میدهد که رویکرد ما در مدلسازی موانع و پیشبینیها با استفاده از نرمافزار موجود، چند ضلعیهای دوبعدی و اطلاعات ارتفاع کم چگالی موفق بوده است.
جدول 2. نتایج آزمون اعتبار سنجی پیش بینی GNSS، توضیحات سایت و اشیاء سایه دار.
جدول 3. جزئیات دو شیء سایه زن غالب در هر نقطه اعتبار سنجی GNSS.
5.4. بررسی منابع خطا
سه منبع خطای احتمالی هنگام اعتبارسنجی روش شناسایی شدند. یکی یک عامل گمشده در نسخه فعلی مدل، دومی مشخصه بررسیهای GNSS در مناطق شهری و سومی محدودیت بالقوه موانع استفاده شده در مدل است. هر کدام به نوبه خود مورد ارزیابی قرار گرفتند تا سهم آنها در خطاهای آزمایش های پیش بینی ماهواره برآورد شود.
5.4.1. به استثنای پوشش گیاهی
بزرگترین خطا در تست 3 آشکار شد و با بررسی این موقعیت، دلیل آن پوشش گیاهی نزدیک بود. پوشش گیاهی یک مسئله بود، زیرا درختان در مدل پردیس گنجانده نشدند و بنابراین شرایط “برگی” در نظر گرفته شد. با این حال، از آنجایی که این آزمایش در اوایل تابستان انجام شد، یک سناریوی برگی بازنمایی واقعی از واقعیت نبود. به همین دلیل، مناطق مجاور درختان بزرگ منجر به خطاهای اغراق آمیز می شود. نقطه 9 نیز در مجاورت درختان ثبت شد و خطای پیش بینی را نیز نشان داد. توجه به این نکته ضروری است که نقطه 10 در نزدیکی درختان ثبت شده است، اما خطایی نشان نمی دهد. این به این دلیل بود که پوشش گیاهی مانع در نقطه 10 در جنوب شرقی بود (زیموت 156 ∘∘)، در حالی که نشان داده شده است که صورت فلکی GNSS در آن زمان در بالای افق شمال غربی متمرکز شده است و بنابراین، درختان نمی توانند سیگنال GNSS را مسدود کنند. درختان به طور بالقوه می توانند در نسخه آینده مدل گنجانده شوند زیرا نقشه 2 بعدی OSi حاوی لایه هایی با اطلاعات پوشش گیاهی است. در صورتی که درختان بخش مهمی از موانع در منطقه اطراف باشند، ارتفاع درخت را میتوان از سایهها در عکسبرداری هوایی تخمین زد، بررسی یا اندازهگیری کرد. با این حال، هدف روش جدید ما تولید یک روش سریع و کارآمد بود که نیاز به بررسی را از بین می برد و بنابراین درختان در مدل انسداد گنجانده نشدند.
5.4.2. چند مسیری
حذف چند مسیر عامل مهمی در فرآیند اعتبار سنجی بود زیرا اگر سیگنال های ماهواره ای توسط گیرنده ثبت می شد اما به دلیل چند مسیر بودن، ارزش استفاده از گیرنده GNSS به عنوان ابزار اعتبارسنجی به حداقل می رسید. این به این دلیل است که سیگنالهای دریافتی ممکن است ماهوارهها را در خط دید ( شکل 11 الف) نشان ندهند، بلکه سیگنالی را نشان میدهند که از ساختمانی منعکس میشود که از ماهوارهای که از دید ناظر پنهان شده بود منشأ میگیرد ( شکل 11 ب). استراتژی های مکان یابی آنتن سنتی [ 1] برای آزمایش روش پیشبینی GNSS برای زمینهای مسدود مناسب نیستند، و بنابراین یک گیرنده با درجه نظرسنجی مانند R8 در این آزمایشهای اعتبارسنجی استفاده شد، زیرا برای کاهش مسیرهای چندگانه طراحی شده بود. R8 قادر به اندازهگیریهای غیرصافی و فیلتر نشده شبه پرتغالی است که به خطای چند مسیری کم کمک میکند. سیگنالها از یک پاسخ الگوی فضایی با بهره بالا در جهت سیگنالهای فرضی، “درست” و تضعیف در جهتی که سیگنالهای ثانویه انتظار میرود از آن وارد شوند، پیروی میکنند. برای این آزمایشها، ما فرض میکنیم که چون سختافزاری که بهطور خاص برای به حداقل رساندن چند مسیر طراحی شده است، استفاده میشود، میتوان آن را به عنوان یک منبع خطای مهم حذف کرد. نتایج اعتبارسنجی این فرض را مانند هیچ آزمونی توجیه نمی کند مe a s u r eدobsمهآستو�هدobsتجاوز پr e dمن c t eدobsپ�هدمنجتیهدobs، چیزی که احتمالاً در آزمایشات با بالا رخ می داد تیo t aلنشستتی�تیآلنشستو کم پr e dمن c t eدobsپ�هدمنجتیهدobsمانند نقاط 7، 8 و 9. شناسههای اضافی برای هر ماهواره نیز در روشهای تکراری آینده اضافه میشود که به ارزیابی تأثیر چند مسیری در آزمایشها کمک میکند.
5.4.3. تعمیم مدل
منبع خطای بالقوه نهایی کیفیت DSM شطرنجی 2.5 بعدی بود، زیرا روش پیشنهادی با استفاده از نقشه برداری دوبعدی و اطلاعات پایه ارتفاع ایجاد کرد. بالاترین ارزش یک ساختمان به عنوان تک نقطه ارتفاع انتخاب شد. سپس این مورد بر روی کل چند ضلعی ساختمان دو بعدی اعمال شد و در شرایط خاص منجر به اضافه شدن یک منطقه به پشت بام هر ساختمان شد که وجود نداشت. به عنوان مثال، در شکل 11ج، سیگنال یکی از ماهوارهها در محاسبه نمای دید توسط بلوک LOD1 که برای ایجاد شطرنجی LOD0 برای ساختمان سمت راست استفاده میشود، علامتگذاری شده است. یک سقف شیبدار، مانند آنچه که ممکن است در همان ساختمان موجود در LOD2 در سمت چپ وجود داشته باشد، به سیگنالها اجازه میدهد به گیرنده GNSS برسند. این یک منبع خطای اجتناب ناپذیر است زیرا این روش پیشنهاد می شود زیرا جایگزینی برای استفاده از مدل های LOD2 یا LOD3 با جزئیات بالا است که صرفه جویی بالقوه از نظر زمان و هزینه را فراهم می کند. با این حال، دقت پیش بینی در اطراف لبه بام یا سقف شیروانی کاهش می یابد.
شکل 11. منابع خطای احتمالی در پیشبینیها و اعتبارسنجی GNSS ( الف ) هدف LOS به پنج ماهواره ( b ) چند مسیری است که منجر به خطا در نتایج اعتبارسنجی میشود ( ج ) اختلاف بین مدلهای LOD2 که اشیاء دنیای واقعی را بهتر تقریب میکنند و مدلهای LOD1 که نادیده میگیرند. ساختار سقف ایجاد شده با نقشه برداری 2 بعدی.
6. نتیجه گیری
با توسعه روشی که نرمافزار پیشبینی ماهوارهای موجود، نقشه برداری دوبعدی و دادههای ارتفاعی پایه را در یک GIS ترکیب میکند، یک روش پیشبینی GNSS توسعه داده شد، بنابراین نیاز به بررسیهای توپوگرافی زمانبر و پرهزینه با چگالی بالا را نفی میکند. این کار میتواند بررسیهای پیشبینی ماهوارهای را در زمانی که مدلهای شهر از قبل در دسترس نیستند، تسهیل کند، به عنوان مثال، در شهرها یا شهرهایی با نقشهبرداری دیجیتال پایه یا مجموعه دادههای ارتفاعی محدود. با استفاده از ابزارهای موجود در اکثر شرکت ها/سازمان های دولتی با مجوز استاندارد نقشه برداری دیجیتال از آژانس نقشه برداری ملی و ArcMap یا ابزارهای GIS مشابه مانند MapInfo یا QGIS/SAGA GIS، این یک راه حل عملی نشان داده شده است. آزمایشهای دنیای واقعی با استفاده از گیرنده GNSS که برای حذف سیگنالهای اشتباه طراحی شده است، صحت این روش را تأیید کرد. بازگشت صفر خطا در 60٪ از تست ها از جمله سایت های مجاور ساختمان های بلند. اگرچه تعدادی از منابع خطای احتمالی آشکار بود، فقدان پوشش گیاهی در مدل انسداد به طور بالقوه بزرگترین منبع خطا بود. تکرار بعدی این روش شامل پوشش گیاهی میشود و در نتیجه دقت پیشبینیها را در مناطق پوشش گیاهی به طور قابل توجهی بهبود میبخشد. همچنین برای برنامهریزی مسیرهای MMS در مناطق شهری، با محاسبات بهروز شده دید GNSS که در فواصل منظم در طول مسیر اعمال میشود، استفاده میشود. شناسه های اضافی برای هر ماهواره نیز اضافه می شود که به ارزیابی تأثیر چند مسیر در آزمایش ها کمک می کند. کیفیت راهحل ناوبری پس از پردازش با روشهای پیشبینی ماهوارهای موجود و مدلهای شهری با تراکم بالا ارزیابی خواهد شد. روش پیشبینی ارائهشده در این مقاله به راحتی قابل تکرار است و برنامهریزی یک نظرسنجی را با استفاده از یک گیرنده GNSS موبایل در یک منطقه وسیع ممکن میسازد. این منجر به بهبود دید GNSS و در نتیجه افزایش دقت در مناطقی می شود که سیگنال های GNSS ممکن است مسدود شوند.
منابع
- گروال، ام اس; ویل، ال آر. اندروز، PA مبانی ناوبری ماهواره ای و اینرسی. در سیستم های موقعیت یابی جهانی، ناوبری اینرسی و ادغام ، ویرایش دوم. Wiley: Interscience, NJ, USA, 2007; صص 34-48. [ Google Scholar ]
- نسخه دسکتاپ نرم افزار برنامه ریزی Trimble. در دسترس آنلاین: http://ww2.trimble.com/planningsoftware_ts.asp (دسترسی در 5 دسامبر 2014).
- ابزار برنامه ریزی آنلاین Trimble. در دسترس آنلاین: http://www.trimble.com/GNSSPlanningOnline/#/IonoInformation (دسترسی در 5 دسامبر 2014).
- کاهلان، سی. McElhinney، CP; لوئیس، پی. McCarthy, T. MIMIC: ماشین حساب تراکم نقطه نقشه برداری موبایل. در مجموعه مقالات سومین کنفرانس بین المللی محاسبات برای تحقیقات و کاربردهای جغرافیایی، واشنگتن، دی سی، ایالات متحده آمریکا، 1 تا 3 ژوئیه 2012.
- الشیمی، ن. مروری بر سیستم های نقشه برداری سیار. در مجموعه مقالات هفته کاری FIG 2005 و GSDI-8 – از فراعنه تا ژئوانفورماتیک، قاهره، مصر، 16-21 آوریل 2005.
- Grejner-Brzezinska، DA; توث، CK; یی، ی. پل زدن شکاف های GPS در دره های شهری: آیا ZUPT واقعا می تواند کمک کند؟ در مجموعه مقالات چهاردهمین نشست فنی بین المللی بخش ماهواره موسسه ناوبری، سالت لیک سیتی، UT، ایالات متحده آمریکا، 11-14 سپتامبر 2001.
- باربر، دی. میلز، جی. اسمیت-ویسی، اس. اعتبار سنجی هندسی یک سیستم اسکن لیزری متحرک زمینی. ISPRS J. Photogramm. Remote Sens. 2008 , 63 , 128-141. [ Google Scholar ] [ CrossRef ]
- Hesse, R. LiDAR – مدلهای امداد محلی مشتق شده – ابزاری جدید برای کاوش باستانشناسی. قوس. Proscenium 2010 , 17 , 67-72. [ Google Scholar ]
- ویلیامز، ک. اولسن، ام جی; Roe، GV; Glennie, C. سنتز برنامه های کاربردی حمل و نقل موبایل LiDAR. Remote Sens. 2013 , 5 , 4652–4692. [ Google Scholar ] [ CrossRef ]
- مک آردل، جی. دمشار، یو. ون در اسپک، اس. مکلون، اس. طبقهبندی رفتار حرکتی عابر پیاده از مسیرهای GPS با استفاده از تجسم و خوشهبندی. ان GIS 2014 ، 20 ، 85-98. [ Google Scholar ] [ CrossRef ]
- کانوی، سی جی. کین، سی. مک کارتی، اس. آهرن، سی. بهان، الف. استفاده از ناب در ساخت و ساز: مطالعه موردی فرآیند تولید HVAC مبتنی بر BIM. J. Sustain. دس Appl. Res. 2014 ، 2 ، 2-8. [ Google Scholar ]
- هوگنر، ال. Stilla، U. تشخیص نشت حرارتی در نمای ساختمان با استفاده از بافت های مادون قرمز تولید شده توسط نقشه برداری موبایل. در مجموعه مقالات رویداد سنجش از دور شهری مشترک 2009، شانگهای، چین، 20 تا 22 مه 2009.
- ماتیکاینن، ال. Hyyppä، J.; آهوکاس، ای. مارکلین، ال. کارتینن، اچ. تشخیص خودکار ساختمان ها و تغییرات در ساختمان ها برای به روز رسانی نقشه ها. Remote Sens. 2010 , 2 , 1217-1248. [ Google Scholar ] [ CrossRef ]
- پاتل، DP; Srivastava، PK A تجزیه و تحلیل کاهش خطرات سیل با استفاده از سنجش از دور و GIS: مطابقت با طرح برنامه ریزی شهری. اب. Res. مرد 2013 ، 27 ، 2353-2368. [ Google Scholar ] [ CrossRef ]
- مشخصات پیاده سازی CityGML. مشخصات اجرای OpenGIS کاندید. در دسترس آنلاین: https://portal.opengeospatial.org/files/artifact_id=16675 (دسترسی در 5 دسامبر 2014).
- کلیجر، اف. اودیک، دی. Verbree، E. پیشبینی در دسترس بودن و دقت GNSS در محیطهای شهری – مطالعه موردی فرودگاه شیپول. در خدمات مبتنی بر مکان و تله کارتوگرافی II، از ترکیب حسگر تا مدلهای زمینه . Springer: برلین، آلمان، 2009; صص 387-406. [ Google Scholar ]
- کیرشوفر، MK; چندلر، جی اچ. واچرو، آر. برایان، پی. تعیین جهت گیری بیرونی مستقیم برای یک سیستم ثبت میراث کم هزینه. فتوگرام ضبط 2012 ، 27 ، 443-461. [ Google Scholar ] [ CrossRef ]
- وربری، ای. تیبریوس، سی. Vosselman, G. GPS ترکیبی—موقعیت یابی گالیله برای خدمات مبتنی بر مکان در محیط شهری. در مجموعه مقالات سمپوزیوم خدمات مبتنی بر مکان و تله کارتوگرافی، وین، اتریش، 28-29 ژانویه 2004.
- McElhinney، CP; کومار، پی. کاهلان، سی. McCarthy, T. نتایج اولیه از پروژه نقشه برداری سیار بازرسی ایمنی جاده اروپا (EURSI). در مجموعه مقالات سمپوزیوم فنی کمیسیون پنجم ISPRS، نیوکاسل، انگلستان، 22 تا 24 ژوئن 2010.
- لافارژ، اف. دسکامبز، ایکس. زروبیا، ج. Pierrot-Deseilligny، M. استخراج خودکار ساختمان از DEM ها با استفاده از رویکرد شی و کاربرد در مدل سازی سه بعدی شهر. ISPRS J. Photogramm. Remote Sens. 2009 , 63 , 365-381. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هینز، اس. آبلن، اس. تجزیه و تحلیل نظری برآورد ارتفاع ساختمان با استفاده از تداخل سنجی SAR فضایی برای برنامه های نقشه برداری سریع. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2009 ، 38 ، 163-168. [ Google Scholar ]
- هافمن، ک. Fischer, P. DOSAR: یک سیستم SAR هوابرد پلاریمتری و تداخل سنجی چند فرکانسی. در مجموعه مقالات سمپوزیوم علوم زمین و سنجش از دور (IGARSS ’02)، تورنتو، ON، کانادا، 24-28 ژوئن 2002.
- لی، تی. لیو، جی. لین، اچ. جیا، اچ. ژانگ، آر. یو، بی. Luo, Q. یک روش InSAR چند زمانی سلسله مراتبی برای افزایش چگالی فضایی اندازهگیریهای تغییر شکل. Remote Sens. 2014 , 6 , 3349–3368. [ Google Scholar ] [ CrossRef ]
- Vrhovski, D. مدلسازی سطح برای دید ماهوارهای GPS. در مجموعه مقالات شانزدهمین نشست فنی بین المللی بخش ماهواره موسسه ناوبری، پورتلند، OR، ایالات متحده آمریکا، 9 تا 12 سپتامبر 2003.
- کاهلان، سی. McCarthy، T. UAS برنامه ریزی پرواز – بررسی اولیه در مورد تاثیر پارامترهای ماموریت VTOL UAS بر دقت ارتوموزائیک و DSM. در مجموعه مقالات کنفرانس سالانه انجمن سنجش از دور و فتوگرامتی – “مشاهده زمین برای حل مسئله”، گلاسکو، اسکاتلند، 4 تا 6 سپتامبر 2013.
- صفحه محصول Pix4Dmapper. در دسترس آنلاین: http://pix4d.com/products/ (در 5 دسامبر 2014 قابل دسترسی است).
- پیرو، اس. Bétaille، D. رنو، اس. اورتیز، ام. موگل، اف. میزل، دی. Peyret, F. درباره تشخیص و حذف ماهواره غیر خط دید در یک الگوریتم محلی سازی به کمک نقشه سه بعدی. Sensors 2013 , 13 , 829-847. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کیتامورا، م. سوزوکی، تی. آمانو، ی. Hashizume، T. بهبود دقت موقعیت یابی GPS و GLONASS با کاهش چند مسیری با استفاده از دوربین مادون قرمز همه جهته. ربات جی. مکاترون. 2011 ، 23 ، 1125-1131. [ Google Scholar ]
- ماریس، جی. موری، سی. عطیا، دی. رویچک، ی. Flancquart، A. به سوی محلی سازی دقیق در حمل و نقل هدایت شده: ترکیب داده های GNSS و اطلاعات تصویربرداری. ترانسپ Res. قسمت ج: ظهور. تکنولوژی 2014 ، 43 ، 188-197. [ Google Scholar ] [ CrossRef ]
- مگورو، جی. موراتا، تی. تاکیگوچی، جی. آمانو، ی. Hashizume، T. بهبود دقت GPS با انتخاب ماهواره با استفاده از دوربین مادون قرمز همه جانبه. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2008 در مورد ربات ها و سیستم های هوشمند (IROS)، نیس، فرانسه، 22 تا 26 سپتامبر 2008.
- Groves، PD Shadow Matching: یک تکنیک جدید موقعیت یابی GNSS برای دره های شهری. جی. ناویگ. 2011 ، 64 ، 417-430. [ Google Scholar ] [ CrossRef ]
- وانگ، ال. گرووز، PD; Ziebart، MK GNSS تطبیق سایه: بهبود دقت موقعیت یابی شهری با استفاده از مدل شهر سه بعدی با امتیازدهی بهینه پیش بینی دید. در مجموعه مقالات بیست و پنجمین نشست فنی بین المللی بخش ماهواره موسسه ناوبری، نشویل، TN، ایالات متحده، 17-21 سپتامبر 2012.
- ژرمروث، ام. Carstensen، L. GIS و دید ماهواره ای: نماها از فضا. در مجموعه مقالات کنفرانس بین المللی کاربر ESRI 2005، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 25 تا 29 ژوئیه 2005.
- کاونی، اس. فاثرینگهام، اس. چارلتون، ام. Butler, D. Fusion of Terrestrial LIDAR, 2D Vector and Image data in the Generation of a 3D Campus. در مجموعه مقالات چهارمین کارگاه بین المللی در زمینه اطلاعات جغرافیایی سه بعدی، گنت، بلژیک، 4 تا 5 نوامبر 2009.
- فدریچی، بی. جیاکوملی، دی. اسگوئرسو، دی. ویتی، ا. Zatelli، P. یک سرویس پردازش وب برای برنامه ریزی واقعی GNSS. Appl. Geom. 2013 ، 5 ، 45-57. [ Google Scholar ] [ CrossRef ]
- تیلور، جی. لی، جی. کیدنر، دی. Ware, M. مدلسازی سطح برای دید ماهوارهای GPS. در مجموعه مقالات W2GIS، LNCS، لوزان، سوئیس، 15-16 دسامبر 2005.
- دریاچه، مگاوات؛ Woodman، PE; نرمافزار Mithen، SJ Tailoring GIS برای کاربردهای باستانشناسی: نمونهای در مورد تحلیل دید. J. Arch. علمی 1998 ، 25 ، 27-38. [ Google Scholar ] [ CrossRef ]
- لی، جی. Stucky، D. در مورد استفاده از تحلیل دیدگاه برای تعیین مسیرهای کمهزینه در مدلهای ارتفاعی دیجیتال. بین المللی جی. جئوگر. Inf. علمی 1998 ، 12 ، 891-905. [ Google Scholar ]
- ریچ، PM؛ دبیه، RO; هتریک، WA; Savinc، SC استفاده از نماها برای محاسبه تابش خورشیدی رهگیری شده: کاربردها در اکولوژی . انجمن آمریکایی فتوگرامتری و سنجش از دور: Bethesda، MA، ایالات متحده آمریکا، 1994. [ Google Scholar ]
- سوزوکی، تی. Kubo, N. شبیه سازی در دسترس بودن ماهواره GNSS در محیط های شهری با استفاده از Google Earth. در مجموعه مقالات ION’s Pacific PNT 2015، هونولولو، HI، ایالات متحده آمریکا، 20-23 آوریل 2015.
- برگه اطلاعات Bentley Microstation V8. در دسترس آنلاین: http://www.bentley.com/en-US/Products/MicroStation/ (دسترسی در 5 دسامبر 2014).
- گرین وی، آی. Curran، S. Ordnance Survey ایرلند-زندگی پس از نقشه برداری جدید. در مجموعه مقالات IRLOGI 2005، دوبلین، ایرلند، 18 اکتبر 2005.
- برگه داده پایه Cyclone Leica. در دسترس آنلاین: http://hds.leica-geosystems.com/downloads123/hds/hds/cyclone/brochures-datasheet/Leica_Cyclone_BASIC_DS_en.pdf (دسترسی در 5 دسامبر 2014).
- مشخصات محصول 3D Studio. در دسترس آنلاین: http://www.autodesk.com/products/3ds-max/overview (در 5 دسامبر 2014 قابل دسترسی است).
- نرم افزار برگه داده سیستم GNSS Trimble R8. در دسترس آنلاین: http://files-trl.trimble.com/docushare/dsweb/Get/Document-140079/022543-079M_TrimbleR8GNSS_DS_0413_LR.pdf (در 5 دسامبر 2014 قابل دسترسی است).
- Prendergast، WP; کوریگان، پی. اسکالی، پی. شاکلتون، سی. Sweeny، B. سیستم های مرجع مختصات. دستورالعملهای بهترین عمل برای نقشهبرداری دقیق در ایرلند ، ویرایش اول. موسسه نقشه برداران ایرلندی: دوبلین، ایرلند، 2004; ص 17-20. [ Google Scholar ]
- گیرس، جی اف. Touya, G. ارزیابی کیفیت مجموعه داده OpenStreetMap فرانسه. ترانس. GIS 2010 ، 4 ، 435-459. [ Google Scholar ] [ CrossRef ]
- Prendergast، WP; فلین، ام. کوریگان، پی. سوینی، بی. مارتین، ا. موران، P. OSi و ویژگی های مرزی. در مقاله سبز پیشنهاد اصلاح بررسی های مرزی ، ویرایش اول. موسسه نقشه برداران ایرلندی: دوبلین، ایرلند، 2008; صص 1-8. [ Google Scholar ]
© 2015 توسط نویسنده; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر