1. معرفی
پیشروی یکی از شاخص های مهم برای ارزیابی سطح خدمات حمل و نقل است که نشان دهنده فواصل خدمات ترانزیت و منطقی بودن تخصیص منابع حمل و نقل عمومی است. پایداری مسیر به ویژه برای مسافران بسیار مهم است. قابلیت اطمینان زمان اولین چیزی است که تحت تأثیر قرار می گیرد. زمانی که مسیر دو اتوبوس مجاور خیلی کوتاه شود، فاصله زمانی زیادی برای آمدن اتوبوس سوم وجود خواهد داشت و زمان انتظار مسافران افزایش می یابد، شاید دو برابر شود. علاوه بر این، پیشرفت طولانی مدت تقاضای بیشتری را ایجاد می کند و تا حدی بر زمان سفر اتوبوس تأثیر می گذارد. علاوه بر این، اتوبوس جلوی یک دسته، یا اتوبوس سوم پس از یک دسته، باید مسافران بیشتری را جابجا کند و در اتوبوس شلوغ می شود. بنابراین، راحتی سفر مسافران به طور چشمگیری تحت تأثیر قرار می گیرد.
با رایج شدن و استفاده از مکان یابی خودکار وسایل نقلیه (AVL)، وسایل نقلیه حمل و نقل عمومی با استفاده از GPS در اکثر شهرها نظارت می شوند. به عنوان مثال، در هاربین، هر روز مقدار زیادی داده GPS وجود دارد که مکان واقعی، اطلاعات رسیدن/خروج و سایر اطلاعات رانندگی را ثبت می کند. مقدار زیادی دانش در دادههای GPS هدف اتوبوس وجود دارد که برای ارزیابی و بهبود سطح خدمات حملونقل عمومی در تراکمهای مختلف یا فرکانسهای خروجی شبکه حملونقل عمومی بسیار مفید است. تا حدی، این مشاهدات انگیزه مطالعه ما بود. بنابراین، این مقاله به شناسایی پیشرفتهای غیرعادی با استفاده از دادههای گذرگاه مکانی-زمانی GPS و کاوش عمیقتر برای یافتن دلایل دقیق با ادغام روشهای داده کاوی و فرآیند تحلیل سلسله مراتبی (AHP) کمک میکند.
مشارکت این تحقیق در دو جنبه نهفته است: در تئوری، تمرکز بر داده های گذرگاه GPS، روشی برای ادغام داده کاوی و AHP پیشنهاد شده است. این روش نه تنها واقعیت عینی نهفته در داده های مکانی- زمانی را منعکس می کند، بلکه به عنوان یک روش تحلیل سیستمی و یک روش تصمیم گیری موثر در نظر گرفته می شود. این کار راهی جدید برای مطالعه سیستماتیک داده کاوی مکانی-زمانی و کشف دانش ارائه می دهد. از نظر عملی، یک روش موثر برای شناسایی و تجزیه و تحلیل عمیق پیشروی نامنظم، که یک شاخص مهم خدمات حمل و نقل است، پیشنهاد شده است. این یافته ها کمک قابل توجهی به بهبود خدمات حمل و نقل عمومی شهری می کند.
ادامه این مقاله به شرح زیر سازماندهی شده است. بخش بعدی به بررسی واقعیت تحقیق در مسیر اتوبوس و تجزیه و تحلیل داده های مکانی-زمانی ترانزیت می پردازد. بخش سوم مسیر اتوبوس و داده های مورد مطالعه را شرح می دهد. عملکرد پیشروی ارزیابی میشود و پیشرفتهای غیرعادی در بخش زیر شناسایی میشوند. در بخش پنجم، دادهکاوی و AHP برای یافتن دلایل اساسی ناهنجاری پیشروی ادغام شدهاند و بخش پایانی این مقاله را به پایان میرساند.
2. بررسی ادبیات
در حال حاضر، تحقیقات در مورد پیشرفت اتوبوس عمدتاً نظری است و به دنبال راههای رضایتبخش برای بهبود خدمات حملونقل است. بنابراین، انواع روشها، مانند نگهداشتن [ 1 ، 2 ، 3 ، 4 ، 5 ]، توقف پرش [ 6 ، 7 ]، و سایر اقدامات کنترل ترکیبی [ 8 ، 9 ، 10]]، برای حل مشکل انبوه اتوبوسها پیشنهاد شدهاند که اتوبوسها را قادر میسازد طبق برنامه از پیش منتشر شده حرکت کنند یا مسیر یکنواخت را حفظ کنند. به راحتی می توان دریافت که دلیل دشواری استفاده از این روش ها در عمل این است که برخی از عوامل کلیدی در مقیاس های زمانی و مکانی بسیار تغییر می کنند، مانند شرایط ترافیک و تقاضای حمل و نقل. سپس داده های مکانی- زمانی حمل و نقل عمومی به عنوان یک پایه موثر شناخته می شود.
دادههای مکانی-زمانی ترانزیت موجود عمدتاً شامل دادههای GPS و دادههای کارت مدار مجتمع (IC) است. به محض اینکه داده ها ظاهر می شوند، بسیار گرانبها و سودمند در نظر گرفته می شوند. علاقه زیادی به داده کاوی و تجزیه و تحلیل حمل و نقل وجود دارد. این تحقیق بیشتر بر ویژگی های تقاضای حمل و نقل، ارزیابی خدمات حمل و نقل و ویژگی های در حال حرکت اتوبوس ها متمرکز است. دادههای IC اتوبوس اغلب در تخمین ماتریس مبدأ-مقصد حملونقل عمومی [ 11 ]، کاوی رفتار کاربر [ 12 ] و سایر تجزیه و تحلیل ویژگیهای تقاضا [ 13 ] استفاده میشود. داده های GPS معمولاً به ارزیابی عملکرد سرویس حمل و نقل، مانند قابلیت اطمینان خدمات کمک می کند [ 14 ، 15]]، قابلیت اطمینان زمان سفر [ 16 ]، شاخص ارزیابی شناسایی کیفیت حمل و نقل [ 17 ] و اندازه گیری عملکرد [ 18 ]. ویژگیهای در حال اجرا تحلیل اتوبوس عمدتاً بر پیشبینی زمان رسیدن اتوبوس متمرکز است [ 19 ، 20 ]. در مورد مسیر حرکت اتوبوس، دادههای AVL و دادههای IC برای تجزیه و تحلیل رابطه بین انحراف مسیر و تعداد مسافران داخل هواپیما، و همچنین بین تغییرات زمان حرکت و سالها تجربه اپراتور استفاده شده است [21 ، 22 ]]. روابط معنی داری از نظر آماری پیدا شده است. همچنین برخی کاوش ها در مورد علل پیشرفت غیرطبیعی وجود دارد. در اصل، دو علت، که اثرات روی خیابان و اثرات زمان حرکت در ترمینال هستند، با استفاده از نمودارهای مسیر زمان-مکان چندین سفر اتوبوس مورد تجزیه و تحلیل قرار میگیرند. نتایج نشان داد که بیشتر مشکلات پیشروی در نتیجه سرازیری های نامنظم در پایانه ها ایجاد می شود [ 23 ، 24 ]. متعاقبا، یافتههای تجربی نشان میدهند که زمان سفر بین ایستگاههای اتوبوس و زمان ماندن در ایستگاهها، دو عامل کلیدی در مسیرهای نامنظم هستند [ 25]] و چندین دلیل احتمالی مشخص شده است. این علل در بیشتر موارد به طور جداگانه اتفاق نمیافتند و دائماً با یکدیگر ترکیب میشوند. بنابراین، یافتن علل دقیق در زمان و مکان پیشرفتهای نامنظم و تعیین وزن هر علت برای انجام اقدامات بهبود حیاتی است. این دقیقاً یکی از کمک های این مقاله است.
3. پیکربندی مسیر و شرح داده ها
3.1. پیکربندی مسیر
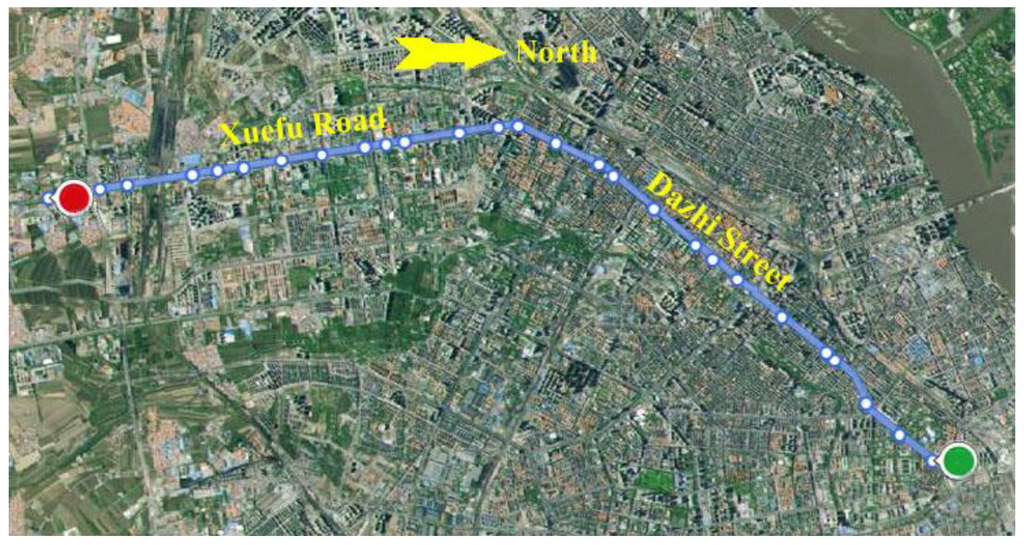
خط اتوبوس انتخاب شده مسیر 104 در هاربین است که در امتداد محور شرق به غرب شهر حرکت می کند و در مجموع 28 ایستگاه دارد. نقشه مسیر در شکل 1 ارائه شده است . مسیر 104 در جاده Xuefu و خیابان Dazhi حرکت می کند که شلوغ ترین جاده ها در ساعات شلوغی در هاربین هستند. علاوه بر این، خط اتوبوس با خط شماره 1 مترو، تنها مترویی که در حال حاضر در هاربین باز است، منطبق است. با توجه به فشار ترافیک و تقاضای حمل و نقل زیاد، مسیر 104 سطوح خدمات نسبتاً پایین تری را به خصوص در ساعات شلوغی ارائه می دهد. اهمیت خط و سطح پایین خدمات از دلایلی است که مسیر 104 مورد مطالعه قرار گرفته است.
شکل 1. نقشه مسیر خط 104 در هاربین.
3.2. توضیحات داده ها
داده های مورد مطالعه در اسفند ماه 1394 جمع آوری شده است، در مجموع 22 روز بدون احتساب روزهای هفته. سه جدول توسط GPS اتوبوس ثبت میشود: «T_JK_LEAVESTATION» و «T_JK_ARRIVESTATION» به ترتیب اطلاعات مربوط به اتوبوسهای خروج و رسیدن به ایستگاهها را ذخیره میکنند. در حالی که “T_JK_FULLGPSDATA” تمام اطلاعات، از جمله موقعیت مکانی، جهت، سرعت، وضعیت و غیره را در زمان واقعی ثبت می کند. برای اتوبوس، یک قطعه از داده های GPS هر 15 ثانیه ثبت می شود. خطاهای موقعیت یابی مانند سایر سیستم های AVL وجود دارد، اما الگوریتم های کالیبراتور موقعیت، مانند تطبیق نقشه، ضروری نیست، زیرا زمان رسیدن به ایستگاه یا خروج از آن دقیقاً ثبت می شود و همین برای این تحقیق کافی است. “T_JK_LEAVESTATION” تنها به این دلیل تجزیه و تحلیل می شود که داده های مورد استفاده برای تحقیق را به اندازه کافی ثبت کرده است. میز 1در زیر برخی از زمینه های مفید استفاده شده را نشان می دهد.
ستون “O_LINENAME” شماره مسیر است. “O_BUSNAME” یک شناسه منحصر به فرد اتوبوس است. «O_ARRIVEDATE» و «O_ARRIVETIME» تاریخ و زمان واقعی رسیدن اتوبوس در آن ایستگاه است. در حالی که “O_LEAVEDATE” و “O_LEAVETIME” تاریخ و زمان حرکت واقعی آن اتوبوس در آن ایستگاه است. “O_UP” جهت یک اتوبوس را نشان می دهد، “0” به این معنی است که اتوبوس به بالا لینک است، در حالی که “1” نشان دهنده لینک پایین است. لینک بالا این مسیر (از نقطه قرمز به نقطه سبز در شکل 1) برای تجزیه و تحلیل انتخاب شده است . در این صفحه؛ و “O_STATIONNO” شماره ایستگاهی است که اتوبوس از آن خارج می شود یا به آن می رسد.
جدول 1. اطلاعات مورد استفاده در تحقیق در میان داده های GPS اتوبوس (داده های نمونه).
4. ارزیابی عملکرد پیشرو
مسیر حرکت اتوبوس ها به عنوان فاصله زمانی بین دو اتوبوس به هم پیوسته که به یک ایستگاه می رسند تعریف می شود. این یکی از شاخص های مهم منعکس کننده سطح خدمات شبکه حمل و نقل است. هرچه این مسیر طولانیتر باشد، زمان انتظار مسافران طولانیتر میشود، در حالی که پیشرفت بسیار کوتاه منجر به هدر رفتن منابع عمومی میشود. در این بخش، داده های اصلی GPS، پس از پیش پردازش، برای تجزیه و تحلیل ویژگی های مکانی-زمانی عملکرد پیشروی مسیر 104 در هاربین استفاده می شود. سپس، یک روش مبتنی بر آمار برای شناسایی پیشروی غیر طبیعی (خیلی طولانی یا خیلی کوتاه) پیشنهاد میشود.
4.1. پیش پردازش داده ها
برای این تحقیق، نیاز به ایجاد چندین جدول جدید برای سهولت در تحلیل است. برای هر توقف، یک جدول اطلاعات ورود (به جدول 2 مراجعه کنید ) باید ساخته شود و بر اساس زمان رسیدن مرتب شود تا پیشروی و زمان اقامت تجزیه و تحلیل شود. برای هر اتوبوس، یک جدول اطلاعات در حال اجرا مرتب شده بر اساس شماره ایستگاه، همانطور که در جدول 3 نشان داده شده است ، ضروری است. علاوه بر این، رابطه همسایگی مکانی ایستگاهها و رابطه همسایگی زمانی اتوبوسها نیز باید تعیین شود.
جدول 2. جدول اطلاعات ورود توقف 15 (داده های نمونه).
جدول 3. جدول اطلاعات در حال اجرا اتوبوس 3373 (داده های نمونه).
برای هر ایستگاه اتوبوس، فاصله بین دو اتوبوس برابر است با زمان رسیدن اتوبوس زیر منهای زمان رسیدن اتوبوس جلو در جدول اطلاعات ورود. حذف هر گونه نتایج اشتباه ناشی از نشت داده های GPS، خطاهای ساعت و سایر خطاهای سیستماتیک بسیار مهم است. از آنجایی که اتوبوس ها در مسیرهای ثابت حرکت می کنند و فقط زمان و ایستگاه اتوبوس در تحقیق مورد توجه قرار می گیرد، فقط خطاهای سیستماتیک در نظر گرفته شده است. سه برابر انحراف استاندارد به عنوان خطای محدود کننده تشخیص داده می شود p ( – 3 σ< Δ < 3 σ) = 0.993�(−3�<Δ<3�)=0.993. بنابراین نتایج اشتباه تحت این استاندارد پاک می شوند.
4.2. تجزیه و تحلیل ویژگی های مکانی-زمانی
برای اندازهگیری نظم پیشروی، شاخص پایبندی برنامه پیشنهادی توسط کتابچه راهنمای ظرفیت حمل و نقل و کیفیت خدمات ویرایش دوم (TCQSM 2nd ) در این مقاله استفاده میشود که بهویژه برای خدمات حمل و نقل با فرکانس بالا کاربرد دارد. شاخص به شرح زیر محاسبه می شود [ 26 ]
که در آن cvh ضریب تغییرات پیشروی است، و انحراف پیشروی تفاوت بین پیشرفت واقعی و پیشروی برنامه ریزی شده است . پارامتر cvh منعکس کننده تغییر مسیرها و قابلیت اطمینان خدمات حمل و نقل یک مسیر اتوبوس در یک ایستگاه خاص است . با توجه به مقدار c vh ، خدمات حمل و نقل به پنج سطح تقسیم می شود، همانطور که در جدول 4 نشان داده شده است :
جدول 4. سطح طبقه بندی خدمات حمل و نقل.
سطح A به این معنی است که مسیر ایستگاه پایدار است و خدمات حمل و نقل با کیفیت بالا ارائه می شود. در حالی که سطح F به این معنی است که سطح خدمات به دلیل نوسان شدید نوسان بسیار پایین است.
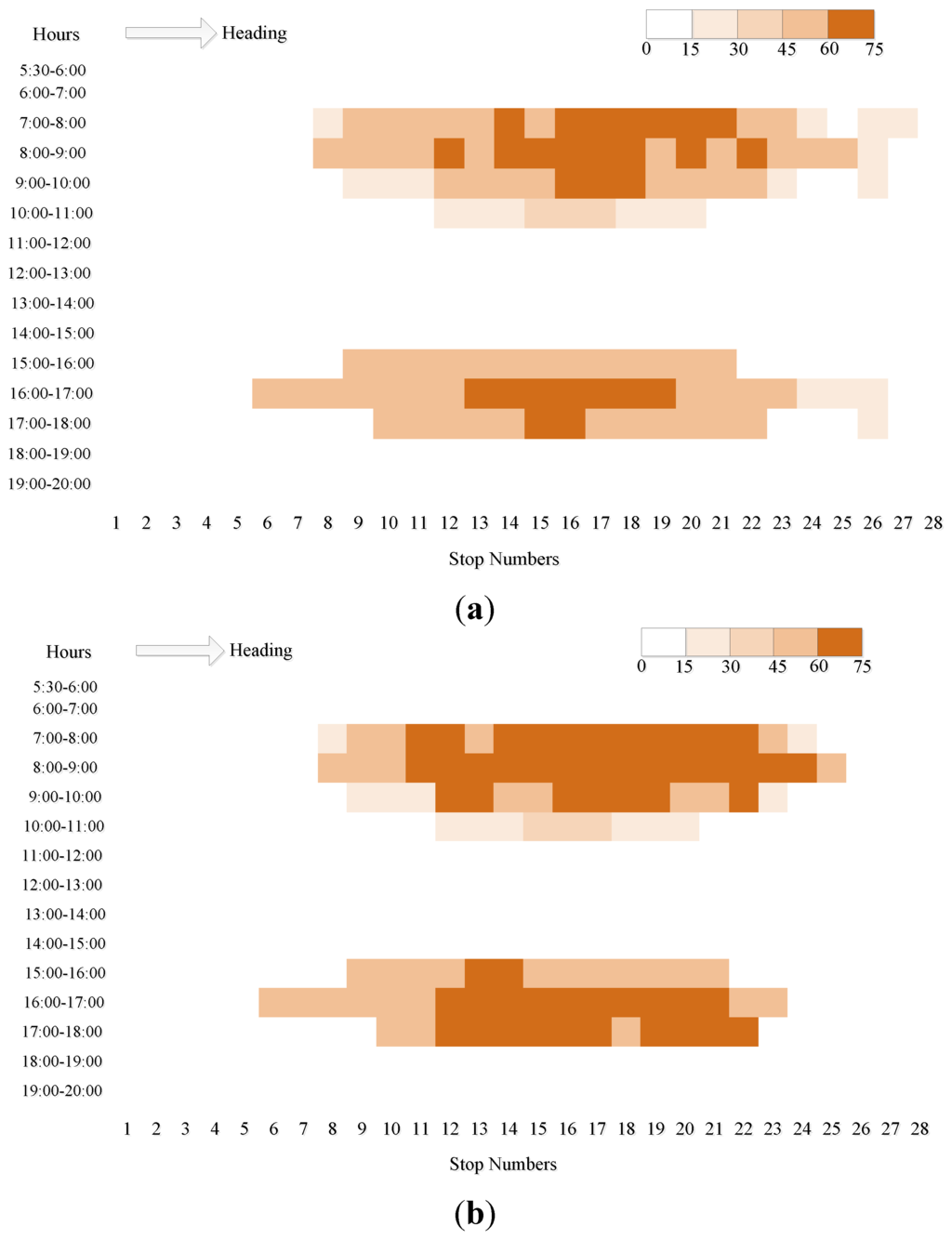
شکل 2 توزیع زمانی و مکانی سطح خدمات پیشرو به دست آمده از داده های GPS اتوبوس را نشان می دهد. محدوده زمانی از ساعت 5:30 تا 20:00 شامل ساعات شلوغی صبح و عصر و ساعات غیر اوج مصرف تنظیم شده است. سطوح خدمات با طیفی از رنگ ها، از سبز تا قرمز، مربوط به سطح A تا سطح F نشان داده می شود.
شکل 2. توزیع زمانی و مکانی سطح خدمات پیشروی مسیر 104.
سطح توقف شماره 1 در شکل 2 همیشه سبز باقی می ماندزیرا توقف مبدا با فاصله خروجی ثابت است. بدیهی است که در شکل می توان دریافت که سطح پایین تری از خدمات در ساعت 7:00 تا 10:00 و 16:00 تا 18:00 ظاهر می شود که عمدتاً مصادف با ساعت شلوغی است. این نشان دهنده ویژگی زمانی حرکت اتوبوس است، در حالی که در فضا، یعنی ایستگاه ها، سطح سرویس ایستگاه شماره 14 تا شماره 21 در ساعات شلوغی به سطح E کاهش می یابد. این ایستگاه ها در سراسر خیابان داژی غربی هستند که یکی از شلوغ ترین جاده های هاربین است. علاوه بر این، مشخص است که سطح سرویس ابتدا (تا توقف 21) کاهش می یابد و متعاقباً (تا انتها) از ایستگاه مبدا تا ایستگاه پایانه در همان بازه زمانی به ویژه ساعات اوج مصرف افزایش می یابد. این شامل فرآیند تشکیل و فرآیند اتلاف در طول خط اتوبوس است.
این یک ارزیابی از پیشرفت اتوبوس و سطح خدمات است. برای یافتن دلیل پایین آمدن سطح خدمات، باید پیشروی های غیرعادی را با معیاری برای تعریف سربالایی های خیلی طولانی و پیشرفت های خیلی کوتاه شناسایی کرد.
4.3. شناسایی غیرعادی پیشروی
سربالایی های غیرعادی، از جمله مسیرهای طولانی تر یا کوتاه تر نسبت به سربالایی برنامه ریزی شده، دلیل اصلی کاهش سطح خدمات هستند، در حالی که با در نظر گرفتن خطاهای معمولی سربالایی، مانند عادت های رانندگی در رانندگی اتوبوس و نوسانات عادی سفر، مقدار مرجع برای شناسایی موارد غیرعادی است. پیشروی قرار نیست سربالایی برنامه ریزی شده (فاصله حرکت در ایستگاه مبدا) باشد. معقول تر است که انتظار پیشرفت را در یک توقف به عنوان مقدار مرجع در آمار تعیین کنیم. پارامتر آماری دیگر، واریانس، گسستگی یک مجموعه داده را منعکس می کند. بنابراین، انتظار و واریانس محدوده نرمال مجموعه داده پیشروی یک توقف را از نظر آماری تعریف می کند.
شکل 3 روش شناسایی سربالایی های غیرعادی را نشان می دهد که به عنوان مثال از توقف شماره 15 استفاده می کند. انتظار ( E ) سربالایی در 22 روز توقف شماره 15 348 ثانیه و انحراف معیار ( σ ) این سربالاها 258 ثانیه است. پیشروها همانطور که در شکل 3 نشان داده شده است به سه گروه تقسیم می شوند . داده های محدوده از ( E – 0.5σ ) (219s) تا ( E + 0.5σ ) (477s) به عنوان پیشروی منظم شناخته می شوند، که در ناحیه سبز بین دو خط چین سبز در شکل قرار دارند. داده ها از ( E – σ ) (90s) تا ( E + σ)(606s) (به استثنای پیشروی های معمولی) در محدوده گسسته نرمال قرار دارند، و این مشاهدات در آمار قابل قبول هستند، به عنوان مناطق آبی در نمودار. در مورد نواحی قرمز، پیشرفت در این نواحی فراتر از نوسانات طبیعی است و به عنوان داده های غیر طبیعی شناخته می شود. سرهای کمتر از ( E – σ ) خیلی کوتاه و آنهایی که بیشتر از ( E + σ ) خیلی بلند هستند.
شکل 3. شناسایی پیشروی غیرعادی در ایستگاه شماره 15 مسیر 104.
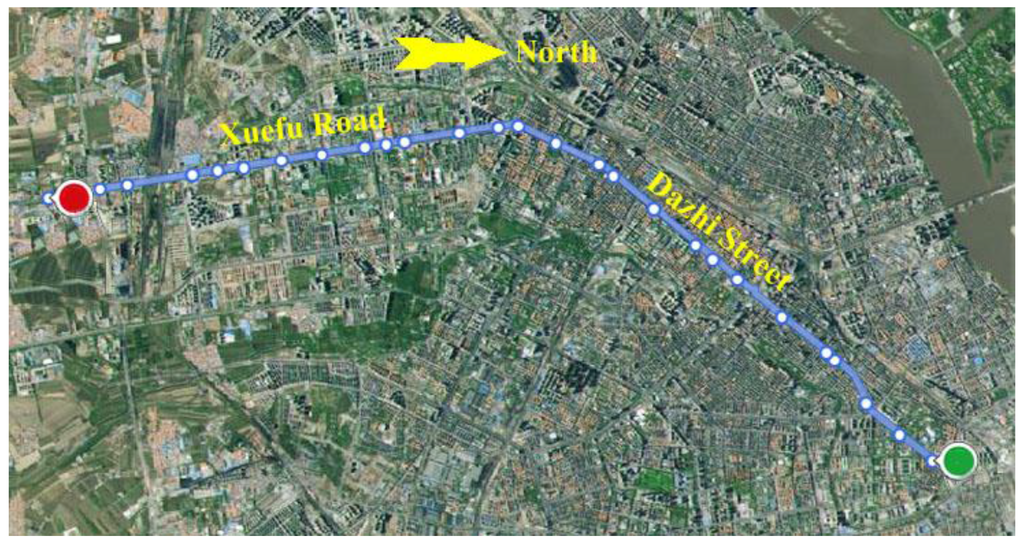
شکل 4. ( الف ) توزیع مسیرهای بسیار کوتاه مسیر 104. و ( ب ) توزیع مسیرهای بسیار طولانی مسیر 104.
نتایج شناسایی مسیرهای غیرعادی در هر ایستگاه از مسیر 104 در شکل 4 نشان داده شده است . سربالایی های خیلی کوتاه و خیلی بلند در شکل 4 نشان داده شده استa، b، به ترتیب. بدیهی است که توزیع فرکانس پیشروی غیرعادی و سطح خدمات مشابه است. با این حال، آنچه جالب است این است که فرکانس هداف های خیلی کوتاه و سربالایی های خیلی طولانی بسیار نزدیک به هم هستند. این منطقی است زیرا هنگامی که یک مسیر خیلی کوتاه اتفاق می افتد، دو یا چند اتوبوس با هم می آیند و یکی از آنها جلوتر یا عقب است و باعث ایجاد فاصله حرکت ثابت در ایستگاه مبدا می شود. بنابراین، زمان انتظار مسافران در ایستگاه افزایش مییابد و در نتیجه مسیری بیش از حد طولانی رخ میدهد. در واقع، مسیرهای بسیار کوتاه باعث پدید آمدن پدیده ای به نام انبوه اتوبوس می شود. جدی ترین عیب انبوه سازی اتوبوس، تخصیص نادرست و هدر رفتن ظرفیت حمل و نقل عمومی است. هنگامی که دو یا چند اتوبوس یک دسته تشکیل می دهند، اتوبوس جلو به احتمال زیاد برای جمع آوری مسافران بیشتر شلوغ است در حالی که مسافران کمتری برای اتوبوس بعدی برای مسیر کوتاه تر باقی می مانند. علاوه بر این، یک فاصله طولانی برای اتوبوس بعدی که به این ایستگاه می رسد وجود خواهد داشت. بنابراین زمان انتظار مسافر افزایش می یابد و تقاضای ترافیک بیشتری انباشته می شود که باعث افزایش تاخیر اتوبوس و ایجاد انبوهی دیگر می شود. به همین دلیل سطح خدمات حمل و نقل پایین تر است.
5. علل تجزیه و تحلیل Bus Bunching
انباشتگی اتوبوس پدیده ای است که از مسیرهای بسیار کوتاه ناشی می شود. به منظور پیشرفت منظم و بهبود سطح خدمات حمل و نقل، یافتن علل انبوه اتوبوس ها بسیار مهم است.
5.1. شناسایی علل توسط انجمن معدن
تحلیل شده است که دلایل انبوه اتوبوسها شامل دو جنبه، زمان سفر بین ایستگاهها و تعداد مسافران (نشست و پیادهروی) در ایستگاهها است [ 25 ]. دومی را می توان با زمان ماندن در توقف ها برای یکنواختی اندازه گیری کرد. برای یافتن دلایل مشخص تر در زمان و مکان برای حل این مشکل، در این تحقیق از تداعی کاوی استفاده شده است. قبل از آن، وضعیت رویدادها باید از قبل تعریف شود.
با استفاده از روش شناسایی دسته بندی اتوبوس که در بالا ذکر شد، زمان ماندن خیلی طولانی/خیلی کوتاه و زمان سفر نیز قابل تشخیص است. بنابراین، هنگامی که اتوبوس به ایستگاه می رسد، یک حالت S* وجود دارد .
که در آن Sdwellitme و Straveltime به ترتیب حالت های زمان اقامت و زمان سفر را نشان می دهند که شامل سه حالت اختیاری است: خیلی طولانی، خیلی کوتاه و عادی. Sbunching دو حالت اختیاری دارد: Bunching یا non, که نشان دهنده وضعیت bus buunching است.
بنابراین، الگوریتم Apriori برای استخراج ارتباط بین Sdwellitme ، Straveltime ، و Sbunching برای هر اتوبوس و هر ایستگاه اعمال میشود. دو معیار، حمایت و اطمینان، برای نشان دادن کیفیت یک قانون تداعی استفاده می شود. همانطور که در جدول 5 نشان داده شده است، شش علت با توجه به نتایج حاصل از تداعی کاوی شناسایی شده است .
جدول 5. درجه نسبی اهمیت برای مقایسه های زوجی.
این شش علت در بیشتر موارد به طور جداگانه اتفاق نمی افتد. یک یا ترکیبی از آنها می تواند باعث ایجاد پدیده انباشتگی اتوبوس شود، بنابراین تعیین وزن هر علت ضروری است.
5.2. باعث تجزیه و تحلیل وزن با استفاده از AHP می شود
فرآیند تحلیل سلسله مراتبی (AHP)، پیشنهاد شده توسط ساعتی در دهه 1970 [ 27]]، یک نظریه تحلیل تصمیم مهم در تحقیقات عملیاتی است. می تواند مسائل نیمه کیفی و نیمه کمی را به صورت کمی حل کند. اصل اساسی AHP مرتبسازی است، یعنی تعیین مرتبسازی بهینه طرحهای جایگزین برای تصمیمگیری. به طور خاص، یک مشکل تصمیم گیری به عنوان یک سیستم تحت تأثیر عوامل مختلف در AHP در نظر گرفته می شود. این عوامل مرتبط و وابسته به هم را می توان با توجه به تبعیت به چند سلسله مراتب تقسیم کرد که به آن مدل ساختار سلسله مراتبی می گویند. سپس، AHP بین هر دو عامل مقایسه میکند و ترتیب مرتبسازی وزن همه عوامل را برای کمک به تصمیمگیری میگیرد. AHP، تجزیه و تحلیل داده های تعبیه شده، در این تحقیق برای تعیین وزن شش علت انباشتگی اتوبوس استفاده می شود. مراحل اصلی روش به شرح زیر است.
(1) ساختار ماتریس قضاوت
ماتریس قضاوت اهمیت نسبی بین هر دو از شش علت را توصیف می کند که گام کلیدی در AHP است. مقیاس مورد استفاده در جدول 6 هنگام انجام مقایسه های زوجی [ 28 ] نشان داده شده است. به عنوان مثال، برای یک ماتریس قضاوت A = [ a ij ]، ij = 5 به این معنی است که عامل i در مقایسه با عامل j اهمیت اساسی یا قوی دارد .
جدول 6. درجه نسبی اهمیت برای مقایسه های زوجی.
اگرچه تفکیک 9 نمره معقول تلقی می شود، اما این موضوع در هنگام قضاوت کم و بیش وجود دارد. یک روش قضاوت که کاملاً بر اساس داده های عینی است، در این مقاله پیشنهاد شده است.
با در نظر گرفتن ایستگاه شماره 15، بر اساس تجزیه و تحلیل داده ها، انبوه اتوبوس در دوره تحقیق 392 بار رخ داده است. تعداد کل 392 به 9 گروه تقسیم شده و به ترتیب نزولی ارزش ارائه شده است، همانطور که در جدول 7 نشان داده شده است .
جدول 7. گروه های تقسیم شده از اعداد کل.
از آنجایی که یکی، یا ترکیبی از شش علت می تواند منجر به انباشتگی اتوبوس شود، و تشخیص دقیق آن دشوار است، یک روش انحصاری در این مقاله پیشنهاد شده است. انباشتگی اتوبوس 290 بار بدون علت A اتفاق افتاده است، یعنی پنج علت دیگر (یک یا ترکیبی) می تواند به 290 برابر انباشتگی اتوبوس منجر شود. هر چه تعداد دفعات انبوه اتوبوس بدون دلیل اتفاق بیفتد، اهمیت علت کمتر می شود. نتایج روش «استخراج» در جدول 8 ارائه شده است .
جدول 8. نتایج روش انحصاری.
اهمیت مقایسه ای بین علت A و علت B برابر است با یک به علاوه اختلاف بین اعداد گروه، یعنی (3-2) + 1 = 2. زمان های بیشتری بدون علت B اتفاق افتاده است، بنابراین علت B از علت A کمتر اهمیت دارد. بنابراین، اهمیت A به B 2 و B به A 1/2 است. سپس ماتریس قضاوت را می توان به صورت زیر ساختار داد.
(2) ارزیابی سازگاری قضاوت های زوجی
ماتریس قضاوت A = [ a ij ] زمانی که شرایط زیر را برآورده می کند، سازگاری دارد.
بدیهی است که قضاوتهای زوجی بین هر دو عامل قابل انتقال هستند و تفکر قضاوت زمانی سازگار است که ماتریس A سازگاری را برآورده کند. بنابراین، ارزیابی سازگاری قضاوت های زوجی برای اطمینان از صحت ضروری است.
ثابت شده است که شرایط لازم و کافی برای یک ماتریس متقابل سازگار A = ( a ij ) n × n این است که حداکثر مقدار ویژه ( λmax ) A برابر با n باشد . ساعتی یک شاخص سازگاری ( CI ) را برای اندازه گیری درجه ناسازگاری تعریف کرد [ 28 ].
از نظر فنی، سازگاری کامل به معنی CI = 0 است . با این حال، سازگاری کامل به ندرت به دست می آید. بنابراین، ساعتی یک شاخص سازگاری تصادفی متوسط ( RI ) را برای ارزیابی سازگاری قضاوتهای زوجی همراه با CI پیشنهاد کرد . RI به صورت زیر بدست می آید:
برای یک n مشخص ، ساعتی یک ماتریس متقابل A’ را به طور تصادفی ساخت. عناصر الف از بین 1، 2، …، 9، 1/2، 1/3، …، 1/9 انتخاب شدند. وقتی نمونه ها به اندازه کافی بزرگ باشند، مثلاً 500، مقدار متوسط حداکثر مقادیر ویژه A’ به صورت محاسبه می شود. λ“m a x�مترآایکس‘، و
Saaty مقادیر RI را برای n از 1 تا 9 ارائه کرد، همانطور که در جدول 9 نشان داده شده است [ 28 ].
جدول 9. مقادیر میانگین شاخص سازگاری تصادفی ( RI ).
سپس، نسبت CI و RI به عنوان نسبت قوام CR تعریف می شود . اگر CR < 0.1 باشد ، سازگاری دارد .
در این صورت می توان دریافت که λ max = 6.09، CI =λحداکثر− nn – 1=6.09 – 66-1 _ _= 0.018=�حداکثر–��–1=6.09–66–1=0.018و RI = 1.24، بنابراین CR = CI/RI = 0.018/1.24 = 0.015 < 0.1. نتایج نشان می دهد که ماتریس قضاوت سازگاری دارد.
(3) محاسبه وزن نسبی
تا اینجا وزن های نسبی را می توان با بردار ویژه حداکثر مقدار ویژه به دست آورد و نتایج توقف شماره 14 تا شماره 21 که سطح سرویس پایین تری دارند در جدول 10 نشان داده شده است .
جدول 10. نتایج تجزیه و تحلیل وزن علل.
بر اساس نتایج تجزیه و تحلیل، “علت C: اتوبوس جلو – خروج دیرهنگام از ایستگاه قبلی” نقش آشکاری برای برانگیختن انبوه اتوبوس ایفا می کند. اتوبوس جلویی که در ایستگاه قبلی دیر ترک میشود، نشان میدهد که مسیر غیرعادی در ایستگاه قبل از توقف قبلی ظاهر میشود. در همین حال، این ممکن است مربوط به توقف های بالادست باشد. این یافته تأیید می کند که “یک حلقه بازخورد مثبت وجود دارد که باعث ایجاد دسته بندی نامطلوب می شود” [ 29]]. علاوه بر این، “B: اتوبوس جلو – زمان طولانی سفر از ایستگاه قبلی تا ایستگاه فعلی” دومین دلیل مهم است. زمان طولانی سفر به معنای ترافیک بد در جاده است. این نشان می دهد که وضعیت ترافیک یک عامل کلیدی برای جمع شدن اتوبوس است. در بین شش علت، اتوبوس جلویی نسبت به اتوبوس زیر تأثیر بیشتری بر انباشتگی اتوبوس دارد. این علل وزنی می تواند به طور قابل توجهی بر اقدامات بهبود تأثیر بگذارد.
6. نتیجه گیری
این مقاله پیشرفت های حمل و نقل را با استفاده از داده های GPS اتوبوس در هاربین بررسی می کند. عملکرد پیشروی مسیر 104 انتخاب شده ارزیابی میشود و مشخص میشود که سطوح خدمات حمل و نقل پایینتر در ساعات شلوغی، به ویژه در ایستگاه شماره 14 تا شماره 21 ظاهر میشود. از نظر آماری، روشی برای شناسایی سربالاییهای غیرعادی بر اساس این دو پیشنهاد شده است. پارامترها: انتظار و انحراف معیار. عمیقاً، ارتباط کاوی برای دادههای مکانی-زمانی اعمال میشود و شش علت انباشته شدن اتوبوسها، از جمله زمان توقف اتوبوسهای جلو و بعدی، زمان سفر اتوبوسهای جلو و بعدی، و تأثیرات قبلی این اتوبوسها آشکار میشود.
از طریق تجزیه و تحلیل داده ها، مشخص می شود که این علل اغلب با یکدیگر ترکیب می شوند. به منظور دستیابی به درک بهتر علل و انجام اقدامات بهبود موثر، از AHP، تجزیه و تحلیل داده های تعبیه شده استفاده می شود. ماتریس قضاوت با روش پیشنهادی «استخراج» ساختار یافته است. نتایج نشان میدهد که تأثیرات قبلی اتوبوسها جدیترین علت انباشتگی اتوبوسها هستند و انباشتگی اتوبوسها بیشتر از اتوبوسهای بعدی متاثر از اتوبوس جلو است. علاوه بر این، زمان سفر برای حفظ پیشرفت منظم قابل توجه است. این یافته ها به طور قابل توجهی برای بهبود سطح خدمات حمل و نقل مفید است.
مزایای روش پیشنهادی در دو نکته نهفته است. از یک طرف، دلایل انباشته شدن اتوبوس را می توان با داده کاوی پیدا کرد، اما مکانیسم تأثیر نامشخص است زیرا یکی یا ترکیبی از این دلایل می تواند منجر به جمع شدن اتوبوس شود. بنابراین، AHP برای تعیین وزن هر علت تعبیه شده است، که در پیشنهاد اقدامات برای بهبود سرویس اتوبوس اهمیت زیادی دارد. از سوی دیگر، یک رویکرد مبتنی بر داده برای ساختار ماتریس قضاوت در AHP استفاده میشود که نتایج قضاوتهای زوجی را قانعکنندهتر میکند.
علاوه بر این، برخی از نقاط ضعف این کار وجود دارد و برخی از مشکلات حل نشده باقی مانده است. در مرحله اول، زمان ماندن در یک ایستگاه به عنوان تقاضای حمل و نقل در مطالعه در نظر گرفته می شود. این یک روش تقریبی غیر مستقیم به دلیل داده های ناکافی است. در صورت امکان، بهتر است از داده های آی سی اتوبوس برای تجزیه و تحلیل تعداد مسافران سوار/ پیاده شده در هر ایستگاه و اندازه گیری تاثیر آن بر زمان حرکت اتوبوس استفاده کنید. ثانیاً، روش داده کاوی مورد استفاده در این کار فقط شامل تجزیه و تحلیل ارتباط است زیرا به اندازه کافی ساده و مؤثر است تا نتایج مورد انتظار را به دست آورد. برای نتایج دقیقتر و دامنه کاربرد گستردهتر، تکنیکهای دیگری مانند رویکردهای یادگیری ماشینی نیز تشویق میشوند. ثالثاً، روش پیشنهادی در موردی اعمال میشود که فقط یک خط اتوبوس وجود دارد. برای حل موثر مسائل عملی، تجزیه و تحلیل خطوط اتوبوس چندگانه باید انجام شود و تعامل خطوط اتوبوسرانی و حمل و نقل عمومی نیز باید به دقت مورد توجه قرار گیرد. در نهایت، اگرچه پیشروی های نامنظم غیرفعال برخی اثرات منفی بر خدمات حمل و نقل دارند، اما با کنترل فعال می توانند برای برآوردن تقاضای ترانزیت پویا مفید باشند. به عنوان مثال، زمانی که تقاضا فراتر از ظرفیت اتوبوس باشد، دسته بندی اتوبوس می تواند بسیار مفید باشد. نحوه حذف bus bunching نامطلوب و تولید bus bunching مفید یکی از جهت گیری های تحقیقاتی آینده است. آنها می توانند برای برآوردن تقاضای ترانزیت پویا با کنترل فعال مفید باشند. به عنوان مثال، زمانی که تقاضا فراتر از ظرفیت اتوبوس باشد، دسته بندی اتوبوس می تواند بسیار مفید باشد. نحوه حذف bus bunching نامطلوب و تولید bus bunching مفید یکی از جهت گیری های تحقیقاتی آینده است. آنها می توانند برای برآوردن تقاضای ترانزیت پویا با کنترل فعال مفید باشند. به عنوان مثال، زمانی که تقاضا فراتر از ظرفیت اتوبوس باشد، دسته بندی اتوبوس می تواند بسیار مفید باشد. نحوه حذف bus bunching نامطلوب و تولید bus bunching مفید یکی از جهت گیری های تحقیقاتی آینده است.





بدون نظر