

خلاصه
استانبول با جمعیتی بیش از 14 میلیون نفر و تولید ناخالص داخلی بیش از 300 میلیارد دلار، بر اقتصاد ترکیه تسلط دارد. متأسفانه، با توجه به نزدیکی شهر به چندین سیستم گسلی شناخته شده، این تمرکز دارایی های اجتماعی و اقتصادی به طور دائمی توسط زلزله های بالقوه ویرانگر تهدید می شود. به عنوان اقدامی برای کاهش پیامدهای چنین حوادثی و برای افزایش تابآوری جوامع در معرض، استخر بیمه بلایای ترکیه (TCIP) راهاندازی شده است تا بیمهای مقرونبهصرفه و قابل اعتماد در برابر زلزله را برای خانوارهای سراسر کشور ارائه کند. پس از یک رویداد مخرب، به ویژه در استانبول، ظرفیت عملیاتی TCIP به دلیل تعداد بالای ادعاهایی که برای شروع روند بازیابی باید سریع و منصفانه باشد، به طور جدی با چالش مواجه خواهد شد.تکنیکهای اولویتبندی موقت برای سادهسازی فرآیند جمعآوری و تجزیه و تحلیل دادهها، با کاربرد در هر دو مرحله قبل و بعد از رویداد. نتایج اولیه بهدستآمده در بشیکتاش، منطقه پرجمعیت استانبول، ارائه و مورد بحث قرار گرفته است.
کلید واژه ها:
خطر لرزه ای ؛ بیمه زلزله ; اطلاعات جغرافیایی فضایی ؛ استانبول ؛ اولویت بندی
چکیده گرافیکی
1. معرفی
استانبول با جمعیتی بیش از 14 میلیون نفر و تولید ناخالص داخلی بیش از 300 میلیارد دلار، محرک اصلی اقتصاد ترکیه است. متأسفانه، این تمرکز دارایی های اجتماعی و اقتصادی دائماً توسط زلزله های بالقوه ویرانگر تهدید می شود، زیرا شهر به چندین سیستم گسلی شناخته شده نزدیک است. ترکیه در واقع در یکی از فعال ترین مناطق زلزله زده جهان واقع شده است. شواهد روشنی وجود دارد که چندین زمین لرزه مهم (با بزرگی بیشتر از 7) در 2000 سال گذشته در منطقه مرمره شرقی رخ داده است [ 1]] و در گذشته نه چندان دور شاهد بلایای بزرگ بوده ایم. به ویژه، در 17 آگوست و 12 نوامبر 1999، دو زمین لرزه در امتداد غربی گسل آناتولی شمالی رخ داد که باعث بیش از 15000 تلفات در شهرهای Izmit و Gölcük شد و بیش از 300000 واحد مسکونی ویران یا آسیب دیده و بیش از 0000000 افراد آواره [ 2 ]. تأثیر این زلزله از نظر اقتصادی نیز قابل توجه بود و هزینه ای بین 5 تا 14 میلیارد دلار داشت [ 3 ]. توافق عمومی بین محققان وجود دارد که یک رویداد لرزه ای بزرگ می تواند در آینده نزدیک به این منطقه رخ دهد [ 1 , 4 , 5 , 6]. یک زمین لرزه امتداد لغز 7.5 ریشتری که روی گسل مرمره رخ می دهد، که بدترین سناریوی سازگار با خطر لرزه ای محلی [ 4 ، 6 ، 7 ] در نظر گرفته می شود، می تواند بین 30000 تا 40000 تلفات و احتمالاً بیش از 30٪ منجر شود. کل ساختمان به طور متوسط یا شدید آسیب دیده است [ 7 ، 8 ]. از جمله اقدامات پیشگیرانه و کاهشی اتخاذ شده توسط دولت ترکیه پس از بلایای 1999، ایجاد استخر بیمه بلایای ترکیه (TCIP) است، یک نهاد بیمه بخش عمومی که ماموریت آن ارائه بیمه خطر بلایا به صاحبان خانه در سطح ملی است. 9 ]. اهداف اصلی TCIP عبارتند از:
-
ارائه پوشش بیمه زلزله با قیمت مناسب برای تمامی منازل شهری
-
محدودیت مواجهه مالی دولت در برابر بلایای طبیعی،
-
بهبود شیوه های کاهش ریسک و کاهش ریسک در ساخت و ساز مسکونی.
TCIP از زمان تأسیس خود در سال 2000 به ضریب نفوذ 39.5% در ترکیه با بیش از 6.9 میلیون سیاست و ضریب نفوذ 51.1% در استانبول با 1.9 میلیون خط مشی فعال دست یافته است (منبع: TCIP). با پیشبینی کوتاهمدت رسیدن به 10 میلیون سیاست تا سال 2020، معادل سهم بازار ملی حدود 55 درصد، TCIP در حال حاضر افزایش گستردهای در آگاهی از خطرات جمعیت ایجاد کرده است و چندین کشور زلزلهخیز دیگر را ترغیب کرده است. برنامه های مشابه را راه اندازی کنید [ 9 ].
علیرغم این ارقام دلگرمکننده، وقوع زلزلهای قدرتمند در یک منطقه شهری با تراکم بالا، قابلیتهای عملیاتی TCIP را برای تسویه کارآمد ادعاهای مرتبط با چالش جدی خواهد داشت. از سال 2010، TCIP بیش از 10000 ادعا را با موفقیت مدیریت کرده است که تنها یک رویداد (زلزله سال 2011 وان) به تنهایی 8700 ادعا را شامل می شود. با این حال، یک رویداد M7+ در منطقه استانبول، همانطور که در بالا ذکر شد، میتواند 300000 ادعای خیرهکننده را در چند هفته ایجاد کند [ 8 ، 10 ]، تعداد بسیار زیادی که برای حل و فصل آن نیاز به سالها دارد.
هنگام تجزیه و تحلیل فرآیند مدیریت ادعای داخلی، یک گلوگاه بالقوه در روند بازرسی پیدا شد که به یک اپراتور با تجربه نیاز دارد تا به طور فیزیکی از ساختمان میزبان سیاست مربوط بازدید کند تا سطح واقعی آسیب را ارزیابی کند. در حالی که این روش برای یک مدیریت ادعای معمول مناسب است، برای یک رویداد عظیم غیرممکن است، که به هزاران اپراتور به طور همزمان در این زمینه نیاز دارد. ضرورت یک روش کارآمدتر برای جمعآوری دادههای مرتبط با خطمشی به منظور سادهسازی فرآیند مدیریت ادعا از ملاحظات فوق مشهود است و به رویکردهای نوآورانه نیاز دارد تا بتوان با این موضوع به درستی مقابله کرد.
این مقاله یک رویکرد جدید را برای جمعآوری سریع اطلاعات بصری محلیسازی شده جغرافیایی از وضعیت آسیب ساختمانهای میزبان بیمهنامه توصیف میکند، که به طور قابلتوجهی فرآیند مدیریت خسارت را سادهتر میکند. رویکرد پیشنهادی مبتنی بر استفاده از یک سیستم نقشهبرداری متحرک سبک وزن برای جمعآوری تصاویر همهجهت مرجع جغرافیایی از محیط شهری آسیبدیده است که سپس به صورت آفلاین تحلیل میشوند. جدا کردن مجموعه دادههای درجا از تجزیه و تحلیل واقعی تصاویر جمعآوریشده، تعدادی مزیت دارد:
-
یک تغییر جزئی در بار بازرسی به یک روش آفلاین، که می تواند به راحتی با درگیر کردن مجموعه ای از اپراتورهای ماهر که از راه دور کار می کنند، کاهش یا افزایش یابد.
-
خطر کمتر برای اپراتورهای درجا تحت تاثیر پس لرزه ها یا فروپاشی های سازه ای، زیرا معمولاً تداخل کمتری با عملیات بازیابی دارد.
-
یک راه حل فنی ساده برای جمع آوری داده های بصری نیازی به اپراتورهای خبره ندارد و می تواند به سرعت در زمین مستقر و عملیاتی شود.
-
از همین رویکرد میتوان قبل از رویداد برای جمعآوری تصاویر مرجع استفاده کرد، در نتیجه اطلاعات مفید بیشتری برای فرآیند تسویه ادعای پس از رویداد به دست آورد.
در این طرح، نقش حیاتی اطلاعات جغرافیایی و سیستم های اطلاعات جغرافیایی باید تصدیق شود. در این چارچوب، یک روش برای اولویتبندی جمعآوری دادهها، بر اساس ترکیب دو یا چند لایه اطلاعات جغرافیایی که شاخصهای مختلف اهمیت نمونهگیری را رمزگذاری میکنند، معرفی میشود (به عنوان نقشههای تمرکز [11] اشاره میشود و در زیر توضیح داده میشود ) .
بررسی و جمع آوری داده های ژئومکانی، یعنی، اطلاعات مکانی شده جغرافیایی را می توان معادل توصیف آماری جمعیتی در نظر گرفت که عناصر آن برای هدف بررسی مورد توجه هستند. اغلب ابعاد جمعیت، یا بار مربوط به خود جمع آوری داده ها، با شمارش کامل و توصیف عناصر ناسازگار است. به عنوان مثال، اگر وظیفه بازرسی مناطق مسکونی در استانبول را به منظور ترسیم توزیع آسیب (یا مشخص کردن آسیب پذیری آنها در مرحله قبل از رویداد) در نظر بگیریم، واضح است که یک بررسی در مقیاس کامل از 800000+ ساختمان ها به منابع قابل توجهی نیاز دارند. در این موارد، یک توصیف آماری بر اساس نمونهگیری از جامعه اساسی باید اعمال شود. علاوه بر این، اگر وظیفه بازرسی ساختمان ها را برای ارزیابی وضعیت آسیب در یک برنامه کاربردی پس از رویداد در نظر بگیریم، چارچوب زمانی محدود (برای تضمین تسویه سریع ادعاها مهم است) یک محدودیت اضافی را نشان می دهد. بازرسی تعداد بسیار کمتری از عناصر جمعیت، و به دنبال آن یک برون یابی (استنتاج) از ویژگی های مورد علاقه، کار را در یک چارچوب زمانی معقول عملی می کند.12 ]. ضرورت عملی مشخص کردن تنها تعداد کمی از عناصر، و شاید در طی مراحل جمع آوری بعدی، مستلزم توسعه رویکردهای بهینه سازی است که به این سوال پاسخ می دهد: “برای دستیابی به یک مبادله بهینه بین چه عناصری باید ابتدا دسترسی داشت. عدم قطعیت برآوردهای کلی و زمان و هزینه خود نظرسنجی؟ ما از چنین رویکردی به عنوان بهینهسازی و اولویتبندی جمعآوری دادههای جغرافیایی – مکانی یاد میکنیم.
در چارچوب در نظر گرفته شده، اولویت بندی به عملیات نمونه گیری انتخابی اشاره دارد که مشخصه آماری یک جمعیت مورد علاقه را محقق می کند (در مورد ما جمعیت توسط ساختمان هایی که دارای یک یا چند بیمه نامه زلزله هستند تعریف می شود) و استفاده بهینه از منابع موجود را به ترتیب انجام می دهد. تا حد امکان با محدودیت های موجود مطابقت داشته باشد. از نقطه نظر زمین آمار، این ارتباط نزدیکی با استفاده از یک نمونه برداری فضایی تطبیقی [ 13 ، 14 ] با احتمال نابرابر [ 15 ] دارد. در ادبیات، می توان چند مرجع در مورد استفاده از اطلاعات پیشینی برای بهبود نمونه برداری یافت که عمدتاً به توصیف منابع محیطی مرتبط است. به عنوان مثال، [ 16, 17 , 18 ] از سنجش از دور و سایر اطلاعات جانبی زمین برای بهینه سازی طراحی نمونه برداری از مناطق زراعی، نظارت بر پوشش زمین یا ترسیم حوضه های آبخیز استفاده می کنند. در زمینه کاهش خطر بلایا و مدیریت ریسک، در حالی که ارزش اطلاعات جغرافیایی به طور فزاینده ای شناخته می شود [ 19 ، 20 ] و استفاده از سیستم های اطلاعات جغرافیایی (GIS) گسترده است [ 21 ]، استفاده از چارچوب های آماری صحیح برای بهینه سازی مجموعه اطلاعات مربوطه در محل محدود است، و مفهوم اولویت بندی بیشتر به انتخاب نقاط داغ برای بلایای طبیعی اشاره دارد (به عنوان مثال، [ 22 ] را ببینید).
ترکیبی از رویکردهای اولویتبندی و فناوری نقشهبرداری سیار پیشنهاد شده در این مقاله در یک سایت نمایندگی در استانبول (ترکیه) آزمایش شده است. منطقه مورد مطالعه در بخش 2 معرفی شده است . در بخش 3 رویکرد پیشنهادی برای جمع آوری سریع داده ها و استراتژی اولویت بندی شرح داده شده است. سیستم نقشه برداری سیار سفارشی که در فعالیت های میدانی به کار می رود به طور خلاصه در بخش 4 توضیح داده شده است . نتایج فعالیت های مقدماتی در بخش 5 ارائه شده و در بخش 6 بسط داده شده است و نتایج در بخش 7 بیان شده است .
2. منطقه مطالعه و داده ها
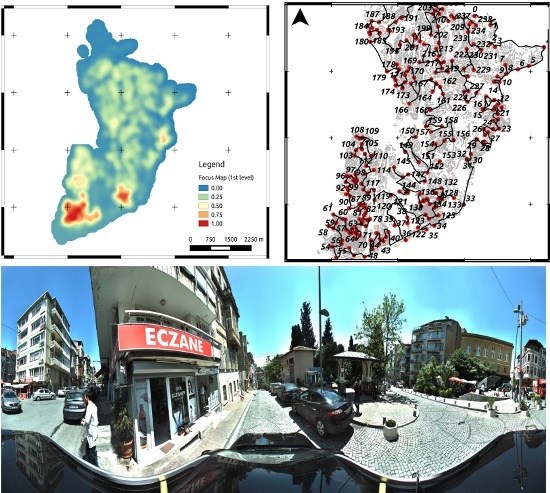
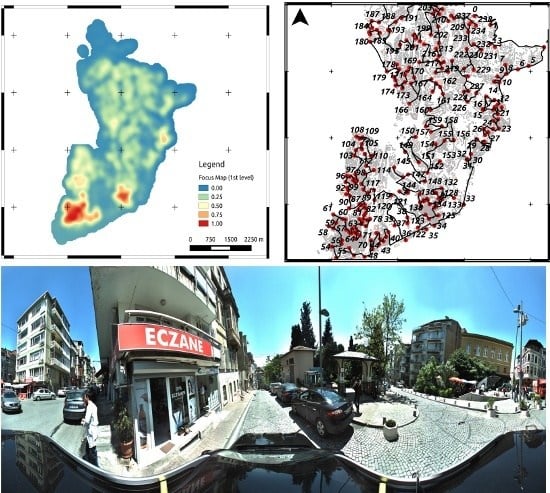
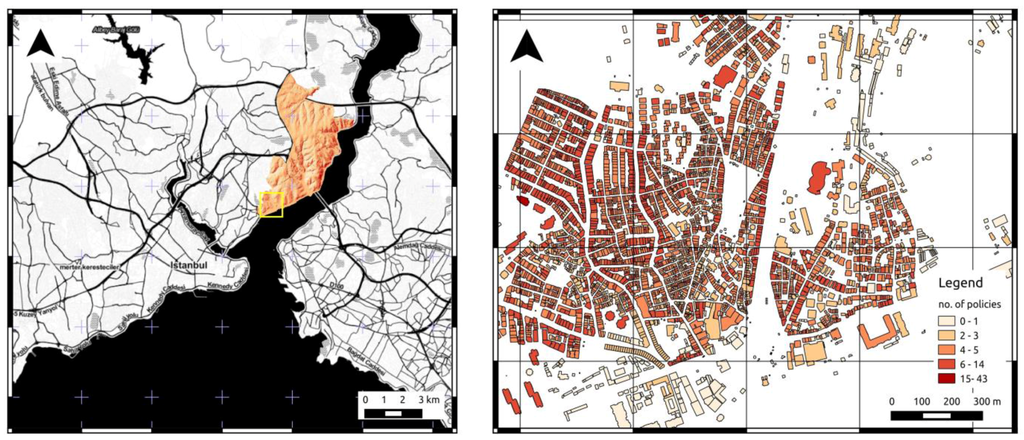
منطقه بشیکتاش استانبول، ترکیه ( شکل 1 ، سمت چپ)، واقع در ساحل اروپایی بسفر، به عنوان منطقه مطالعاتی انتخاب شده است. از شمال با نواحی سارییر و شیشلی، از غرب با کاگیتانه و شیشلی، از جنوب با بی اوغلو و از شرق با بسفر همسایه است. منطقه بشیکتاش مساحتی در حدود 20 کیلومتر مربع با تقریباً 186000 نفر در سال 2012 دارد که منجر به تراکم متوسط جمعیت 9300 نفر در کیلومتر مربع می شود . بشیکتاش ترکیب متنوعی از انواع ساختمان های مختلف را به نمایش می گذارد که می تواند نماینده منطقه بزرگتر استانبول در نظر گرفته شود. شرح مفصلی از گونهشناسی و آسیبپذیری فیزیکی ساختمانها در استانبول را میتوان در [ 4 ] یافت.
تعداد کل سیاست های موجود در منطقه بشیکتاش (در سال 2013) به 29832 با میانگین 1492 سیاست در هر کیلومتر مربع می رسد . چهل و چهار درصد از ساختمان ها (8421) گزارش شده در منطقه حداقل یک سیاست، با میانگین 1.56 سیاست در هر ساختمان و حداکثر 155 سیاست برای یک ساختمان واحد گزارش شده است. می توان اشاره کرد که توزیع سیاست ها نسبتاً پراکنده است، زیرا 95٪ (8054) کمتر از 10 سیاست دارند و 67٪ (6132) از ساختمان ها کمتر از 5 سیاست دارند.
شکل 1. نمای کلی منطقه مورد مطالعه بشیکتاش، استانبول، ترکیه ( سمت چپ ). بزرگنمایی (مستطیل زرد در نقشه سمت چپ) روی توزیع ساختمان ها و بیمه نامه های مربوط به زلزله در منطقه بشیکتاش ( سمت راست ).

شکل 2. توزیع سیاست ها با توجه به کاربری ساختمان ها ( سمت چپ )، و توزیع نسبی آپارتمان ها و دفاتر در مناطق آزمایشی ( سمت راست ).
مجموعه داده های ورودی که در این مطالعه مورد استفاده قرار گرفت شامل فهرست کامل ساختمان و جاده، نقشه احتمالی خطر لرزه ای و مدل رقومی ارتفاع (DEM)، ارائه شده توسط TCIP است. موجودی ساختمان با اطلاعات سیاست های موجود شامل ردپای 19158 ساختمان است که هر کدام اطلاعاتی در مورد تعداد سیاست ها، نوع ساخت و ساز، تعداد طبقات، نوع کاربری (مسکونی، مختلط مسکونی و غیر مسکونی)، تعداد آپارتمان ها دارد. و دفاتر، و تعداد پارکینگ ها ( شکل 1 ، سمت راست، و شکل 2 را ببینید). موجودی جاده برداری 380 کیلومتر را پوشش می دهد که هر بخش جاده شامل اطلاعات ویژگی در مورد نوع جاده، عرض و تعداد خطوط است. شبکه راه از نظر توپولوژیکی تصحیح شده و به یک شبکه هندسی قابل مسیریابی با ویژگیهای اضافی که عوامل هدایت و هزینه را برای سفر در امتداد بخشهای خیابان تعریف میکند، تبدیل شده است. نقشه احتمالی خطر لرزه ای در نظر گرفته شده هم از نظر شتاب اوج زمین (PGA) و هم از نظر سرعت اوج زمین (PGV) با احتمال بیش از 10٪ در 50 سال تخمین زده می شود و بر روی یک شبکه منظم تعریف می شود. همچنین یک لایه شطرنجی که میزان حساسیت انسداد جاده ها را در صورت وقوع زلزله برآورد می کند برای منطقه مورد نظر تهیه شده است. هر دو لایه شطرنجی بر روی یک شبکه با فاصله مساوی با اندازه سلول 0.2 کیلومتر مربع تعریف شده اند .(تقریباً 0.04 درجه طولی، 0.05 درجه وضوح طولی). یک DEM برای منطقه مورد مطالعه با وضوح افقی 1 متر در دسترس است. DEM با اطلاعات هندسه سه بعدی موجودی ساختمان (ردپای و ارتفاع تخمینی) برای استخراج یک مدل سطح دیجیتال (DSM) یکپارچه شده است.
3. اولویت دادن به جمع آوری داده های جغرافیایی
رویکرد پیشنهادی مبتنی بر ادغام مراحل اولویتبندی و بهینهسازی در یک طرح تکراری است. جریان کار کلی مراحل اجرا، که در شکل 3 ترسیم شده است، مستلزم مرحله اول است که در آن اولویت ها و محدودیت ها در قالب لایه های ژئو فضایی جمع آوری می شوند. اولویت بندی مجموعه داده ها با استفاده از اطلاعات جمع آوری شده برای تولید یک نقشه شطرنجی برای ارائه نقشه های تمرکز فوق الذکر تحقق می یابد [ 11]]. نقشههای کانونی لایههای اطلاعات جغرافیایی مختلف را که معیارهای فردی را نشان میدهند، در یک شطرنجی واحد ترکیب میکنند که احتمال گنجاندن هر نقطه را نشان میدهد، یعنی احتمال انتخاب نقطه برای بررسی مشروط به احتمال نمونهگیری از هر یک از لایههای دیگر (تجمع احتمال) . این به نوبه خود مرحله جمع آوری داده های بعدی را هدایت می کند. به منظور اجرای یک بررسی کارآمد بر اساس استفاده از یک سیستم نقشه برداری سیار، مجموعه ای از نقاط نمونه بر اساس نقشه تمرکز محاسبه شده تولید می شود و به طور مناسب در شبکه جاده های موجود مسیریابی می شود. این به فرد اجازه می دهد تا با رمزگذاری محدودیت های بررسی اضافی در الگوریتم مسیریابی، بهینه سازی بیشتر مجموعه داده های کلی را درک کند.
سپس سیستم نقشه برداری متحرک طبق مسیر برنامه ریزی شده مستقر و هدایت می شود. تصاویر جغرافیایی و همه جهتی جمع آوری شده در طول بررسی می توانند به طور مناسب توسط یک یا چند اپراتور تجزیه و تحلیل شوند و اطلاعات استخراج شده در یک پایگاه داده جغرافیایی ذخیره شود. علاوه بر این، نتایج این نظرسنجی میتواند برای تکرار فرآیند اولویتبندی و بهینهسازی با در نظر گرفتن محدودیتهای اصلی و اطلاعات جمعآوریشده در میدان مورد استفاده قرار گیرد، بنابراین فرآیند جمعآوری دادههای تکراری و افزایشی تحقق مییابد.
3.1. نمونه گیری اولویت بندی شده
اولین مرحله اولویت بندی بر اساس مفهوم نقشه های تمرکز [ 11 ] است که در بالا توضیح داده شد. به منظور محاسبه نقشه فوکوس، هر یک از لایه های ورودی در یک احتمال نمونه برداری نگاشت (نرمال) می شوند. این نگاشت می تواند خطی یا غیرخطی باشد (به [ 11 ) مراجعه کنید] برای مثال) و با مرتبط کردن احتمالات نمونه برداری به مکان ها با توجه به مقدار در نظر گرفته شده توسط خود لایه انتخاب می شود. به عنوان مثال می توانیم به عنوان لایه های ورودی توزیع بیمه نامه ها را در نظر بگیریم. در جایی که تراکم فضایی سیاست ها بیشتر است، لایه نگاشت شده احتمال نمونه برداری بالاتری را نشان می دهد. لایه های نگاشت شده، که اکنون احتمالات نمونه گیری متفاوتی را تعریف می کنند، می توانند با یک رویه ادغام ترکیب شوند. بسته به روشی که احتمال نمونه گیری مشترک باید اجرا شود، ادغام می تواند ضربی، افزایشی یا مختلط باشد. یک ادغام ضربی احتمالات نمونه برداری کوچک را به مکان هایی مرتبط می کند که حداقل یکی از لایه های ورودی احتمال کمی دارد. برعکس، ادغام افزودنی احتمال نمونه برداری بالاتری را در جایی که حداقل یکی از لایه های ورودی احتمال بالایی دارد مرتبط می کند. با تغییر وزن ها (نگه داشتن مجموع وزن ها به 1)، اهمیت نسبی مجموعه داده ها نیز تغییر می کند. با ادغام لگاریتم خطی، وزن ها را می توان بیشتر افزایش داد تا بررسی نتیجه انتخابی تر شود. با افزایش مقادیر مطلق وزن ها (ثابت نگه داشتن نسبت نسبی)، تنها بالاترین مقادیر (در نتیجه نشان دهنده اولویت بالاتر) حفظ می شود (نگاه کنید بهشکل 4 ).

شکل 3. نموداری که اولویت بندی جریان کار را با نمونه گیری چند مرحله ای تکراری نشان می دهد.
نقشه های تمرکز مختلف، بر اساس لایه های ورودی مختلف، می توانند برای بهینه سازی و اولویت بندی جمع آوری داده ها، با توجه به مرحله عملیاتی خاص، پیاده سازی شوند. به منظور تجزیه و تحلیل موجودی ساختمان در مرحله پیش از رویداد، توزیع مورد انتظار خطر لرزه ای را می توان با تراکم بیمه نامه ها و توزیع ساختمان ها ترکیب کرد. نمونه ای از نقشه تمرکز قبل از رویداد در شکل 4 ارائه شده است . برای ارزیابی آسیب پس از رویداد، توزیع اولیه آسیب فیزیکی به دست آمده توسط سنجش از راه دور یا بازرسی مستقیم می تواند با توزیع مورد انتظار انسداد جاده ترکیب شود.
هنگامی که نقشه تمرکز محاسبه شد، می توان از آن برای ایجاد مجموعه ای از نقاط نمونه برداری در منطقه مورد بررسی استفاده کرد. بسته به کاربرد میتوان از طرحهای نمونهگیری مختلف استفاده کرد. برای مثال، اگر به یک برآورد متوسط از جمعیت مورد نظر نیاز باشد، یک نمونهگیری طبقهای تخمینهای مناسبی را ارائه میدهد [ 12 ]. برای هدف برنامه فعلی، یک طرح احتمال متناسب با اندازه (PPS) [ 12 ] استفاده شده است، به منظور تولید نقاط نمونه برداری که مستقیماً با نقشه تمرکز محاسبه شده مرتبط هستند.. به این ترتیب نقاط با احتمال نمونه گیری بالاتر از اولویت بیشتری در نظرسنجی برخوردار خواهند بود. چگالی نقاط با مقدار نقشه تمرکز همبستگی مثبت دارد. تعداد نقاط تولید شده یک پارامتر اضافی است که بر روند کلی تأثیر می گذارد. به عنوان مثال، نقاط بیش از حد باعث اشباع منطقه می شود، بنابراین کارایی فرآیند بهینه سازی را کاهش می دهد. علاوه بر این، با انتخاب یک مجموعه نمونه برداری کوچکتر، می توان یک طرح نمونه گیری تکراری را تحقق بخشید. مجموعه نمونهبرداری مکان نقاطی را نشان میدهد که بر اساس شاخصهای ورودی و طرح نقشهبرداری آنها، کاندیدای خوبی برای جمعآوری دادههای میدانی هستند.
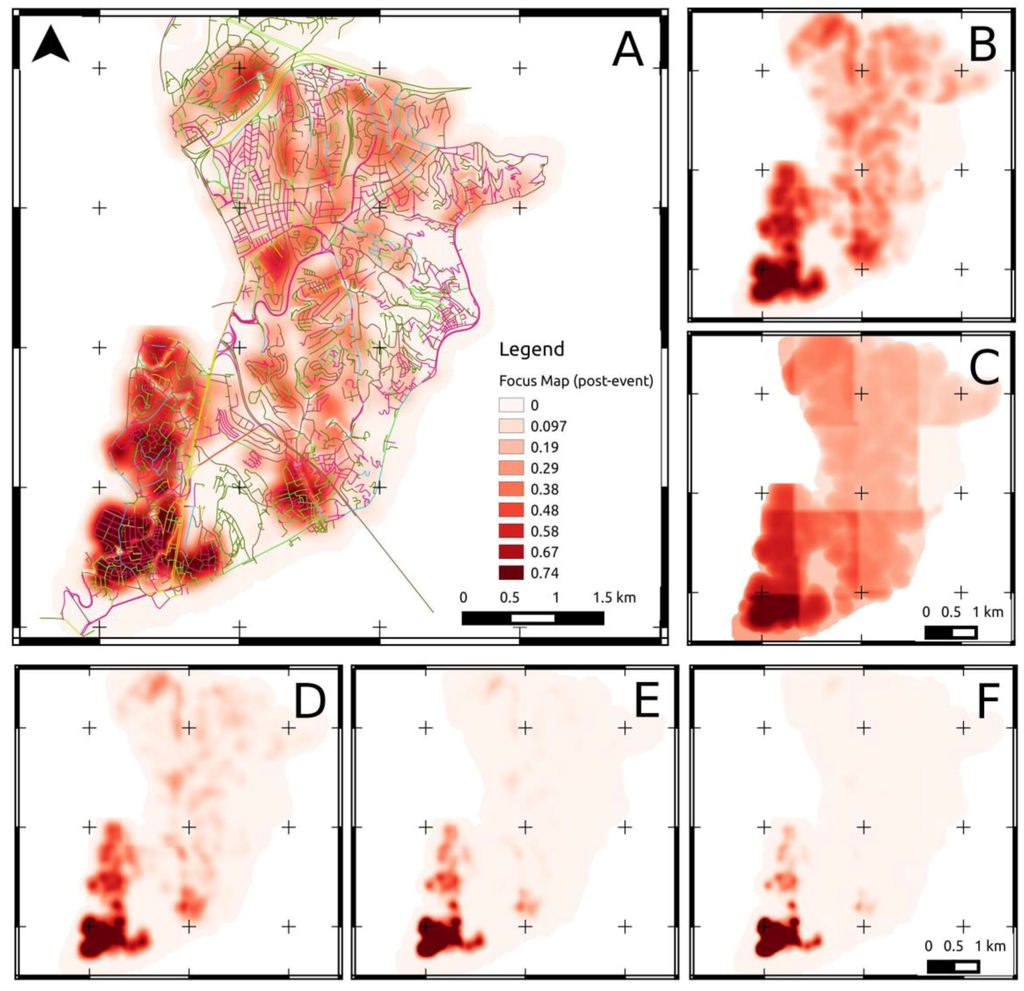
شکل 4. ( الف ) نمونه ای از نقشه تمرکز به دست آمده از ادغام افزایشی دو لایه نرمال شده که چگالی فضایی سیاست ها با وزن w1:0.7 و خطر لرزه ای تخمین زده شده در ناحیه، با وزن w2:0.3 را توصیف می کند. ( ب ) همان نقشه تمرکز محاسبه شده با وزن (0.5، 0.5). ( C ) همان نقشه تمرکز محاسبه شده با وزن (0.1، 0.9). قسمت پایین: نقشه های تمرکز پس از رویداد با افزایش وزن به منظور افزایش گزینش پذیری روش نمونه گیری. از چپ به راست، وزن ها به ترتیب ( D ) (1، 1،1)، ( E ) (2، 2، 2)، ( F ) (3، 3، 3) هستند که در آن لایه 1: توزیع ساختمان/خط مشی ، لایه 2: خطر لرزه ای، لایه 3: انسداد جاده ها.
3.2. بهینه سازی مسیریابی
به منظور یافتن یک مسیر بهینه که بخشهای جاده شناسایی شده توسط نقاط نمونه را پوشش میدهد، نزدیکترین رئوس جاده به نقاط نمونه بهعنوان ایستگاههای واقعی مسیر انتخاب میشوند تا توسط یک بررسی پوشش داده شوند. مشکل مسیریابی حاصل را می توان به مسئله فروشنده دوره گرد [ 23 ] تقلیل داد، جایی که یک مسافر باید با توجه به تابع هزینه و در نظر گرفتن محدودیت های اعمال شده توسط شبکه جاده، از تمام ایستگاه ها در مقرون به صرفه ترین ترتیب عبور کند. عامل هزینه مورد استفاده در این مطالعه به سادگی طول یک بخش خیابان است. بنابراین، کوتاه ترین مسیر در سراسر نقاط نمونه بهینه در نظر گرفته می شود. عوامل هزینه اضافی (مانند زمان سفر، پول، و غیره ) و محدودیت ها (به عنوان مثال، کیفیت خیابان، خیابان های یک طرفه، اطلاعات ترافیک و غیره) .) می تواند به عملیات مسیریابی اضافه شود، اگر چنین اطلاعاتی در دسترس و مورد نیاز باشد. عوامل و محدودیتهای هزینه به عنوان ویژگیهای شبکه راه تعریف میشوند و از نظر فضایی در سطح بخش جاده حل میشوند. سپس یک الگوریتم چندگانه Dijkstra [ 24 ] برای محاسبه مسیر نمونه برداری واقعی از طریق تمام توقف های مرتب شده استفاده می شود.
3.3. بررسی های چند مرحله ای تکراری
زمانی می توان از نظرسنجی های چند مرحله ای استفاده کرد که نمی توان یک نظرسنجی را در یک مرحله انجام داد. به عنوان مثال، این ممکن است زمانی اتفاق بیفتد که اطلاعات مهمی که میتواند نظرسنجی درجا را بهینهسازی/اولویتبندی کند، از قبل در دسترس نباشد.یا نظرسنجی که باید انجام شود بسیار پیچیده و طولانی است که در یک مرحله انجام نمی شود. بنابراین، نمونهبرداری چند مرحلهای میتواند بهویژه در مورد بررسی پس از فاجعه جالب باشد، جایی که نه توزیع واقعی خسارتها، و نه وضعیت جادهها، قبل از بررسی اولیه به خوبی مشخص نیست. در این مورد، یک نظرسنجی چند مرحلهای برای محدود کردن پیمایشهای بعدی بر اساس دادههای جمعآوریشده مستقیم در میدان مورد استفاده قرار میگیرد. همچنین، در یک مورد قبل از فاجعه، زمانی که، برای مثال، یک شهر کامل یا یک منطقه قابل توجه باید بررسی شود، نمونهگیری چند مرحلهای میتواند رویکرد مفیدی برای تقسیم نظرسنجی به مراحل مختلف و بعدی باشد – بهویژه با توجه به اینکه یک سیار سیستم نقشه برداری معمولاً فقط در نور روز کار می کند، بنابراین داده ها را برای 6 تا 8 ساعت به دست می آورد. تقسیم می تواند سیستماتیک باشد (به عنوان مثال، با تقسیم نظرسنجی برنامه ریزی شده اولیه به بخش های مختلف، که به طور جداگانه انجام می شود) یا تکراری. در مورد دوم، هر نظرسنجی توسط یک نقشه تمرکز متفاوت ایجاد میشود که میزان (و احتمالاً کیفیت) دادههای جمعآوریشده در مراحل قبلی را در نظر میگیرد. این رویکرد می تواند مفید باشد، برای مثال، زمانی که مسیر واقعی از مسیریابی بهینه منحرف می شود (برای انسداد غیرمنتظره جاده یا ترافیک).
به منظور اجرای پیمایشهای تکراری و چند مرحلهای، نقشههای تمرکز مختلف با در نظر گرفتن معیارهای اولویتبندی اضافی، مقدار، وسعت مکانی و کیفیت اطلاعات جمعآوریشده، محاسبه میشوند. گردش کار عملیاتی همان چیزی است که برای بررسی های تک مرحله ای استفاده می شود ( شکل 3). یک نقشه تمرکز اولیه برای ایجاد یک بررسی اولیه محاسبه می شود. سپس نقشه فوکوس دوم محاسبه می شود که مکان های مورد انتظار تحت پوشش اولین نظرسنجی را نیز در نظر می گیرد. بر اساس دومی، می توان یک مجموعه نمونه برداری جدید و بر اساس مسیریابی و در نتیجه بررسی دوم تولید کرد. این اجازه می دهد تا یک نظرسنجی به مراحل کوچکتر تقسیم شود که می تواند به طور تکراری طراحی شود. استفاده از نقشههای فوکوس مختلف باعث میشود اولویتبندی اصلی حفظ شود و در عین حال تا حد ممکن از برهمنهی و افزونگی بین بررسیها جلوگیری شود.
در مورد چنین نمونهبرداری چند مرحلهای تکراری که شامل چندین تکرار از جمعآوری دادهها میشود، موتور مسیریابی امکان بهینهسازی بیشتری از جمعآوری دادههای درجا را فراهم میکند ، به طوری که جریمههایی در مورد افزونگی مشاهده نیز میتواند در طول مسیریابی در نظر گرفته شود. هزینه های ساده (به عنوان مثال، مسافت سفر). تخصیص هزینههای بالاتر برای سفر از طریق بخشهای جادهای که قبلاً در بررسیهای قبلی بازدید شدهاند، به جادههایی که هنوز بازدید نشدهاند ترجیح داده میشود و در عین حال هزینه کلی را به حداقل میرساند.
از آنجایی که همه بررسیها در یک شبکه جادهای انجام میشوند، نمیتوان از درجهای از همپوشانی در بررسیهای تکراری اجتناب کرد، بهویژه که همه بررسیها به مناطقی با احتمال نمونهگیری بالاتر تمایل دارند (یعنی جایی که نقشههای تمرکز مقادیر بالاتری دارند ) . با این وجود، میزان همپوشانی برای مناطق هدف بزرگتر (یا در مناطقی با شبکه جادهای پیچیدهتر)، که در آن مسیرهای جایگزین بیشتری برای مسیریابی در دسترس هستند، کاهش مییابد.
3.4. نمونه گیری پیش بینی
لایههای اطلاعاتی موجود با موفقیت برای طراحی و بهینهسازی پیمایشهای منطقه مورد مطالعه استفاده شدهاند، اما به طور کلی چنین مقادیری از اطلاعات گسترده، هم از نظر پوشش مکانی و هم از نظر ویژگیها، معمولاً در دسترس نیستند. از این رو، محاسبه یک نقشه تمرکز برای اولویت بندی مجموعه داده ها در مکان های دیگر ساده نخواهد بود.
با این حال، می توانیم فرض کنیم که حداقل مقدار محدودی از داده ها همیشه در دسترس باشد، زیرا در فرآیند فعال سازی بیمه نامه ها، TCIP داده های جانبی را جمع آوری می کند و نفوذ TCIP در بازار بیمه نزدیک به 40٪ در ترکیه است. اطلاعات موجود در این مورد همچنان می تواند برای تولید لایه های “مجازی” برای محدود کردن بیشتر نقشه های فوکوس استفاده شود. سپس از این لایه ها برای تولید توزیع های احتمال پیشینی بر اساس استنتاج آماری استفاده می شود .
به منظور نمونهسازی کاربرد عملی ممکن، از تکنیکهای رگرسیون لجستیک چند جملهای برای استنباط احتمال اینکه یک ساختمان بتواند تعداد معینی از سیاستها را بر اساس مجموعهای از ویژگیهای موجود میزبانی کند، استفاده کردیم. این ویژگی ها می تواند شامل تعداد طبقه، نوع ساخت، کاربری و هر ترکیبی از داده های اجتماعی-اقتصادی باشد که به نحوی انتظار می رود با احتمال خرید بیمه زلزله مرتبط باشد.
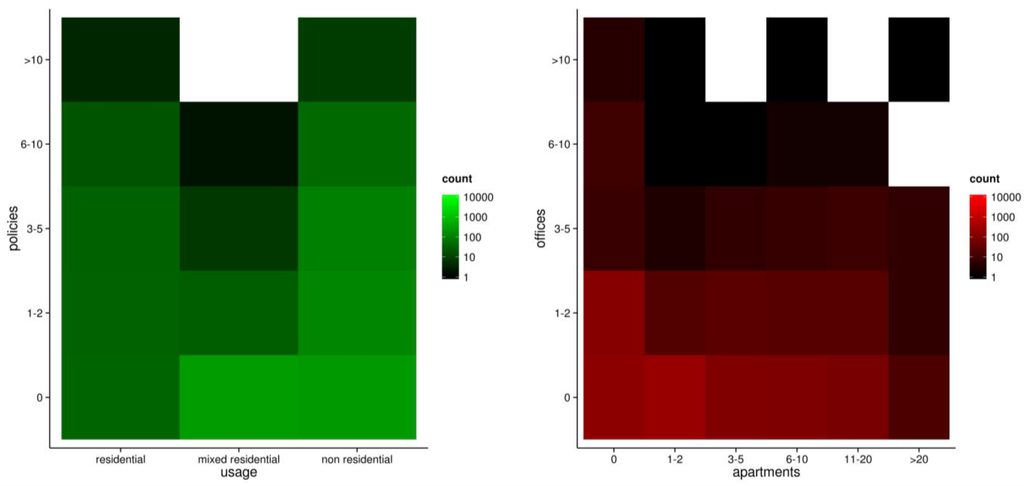
شکل 5. ترکیب مجموعه داده آموزشی از 1000 ساختمان که به طور تصادفی از بین 19158 ساختمان مجموعه داده اصلی انتخاب شده اند (« شمارش » به تعداد سیاست های TCIP در ساختمان اشاره دارد).
این نوع اطلاعات در استانبول و همچنین سایر شهرک های بزرگ ترکیه با وضوح بسیار بالا در دسترس است و انتظار می رود در سال های آینده روند بهبود یابد. به منظور شبیه سازی یک مورد «فقیر داده»، که در آن فقط اطلاعات محدودی برای استنباط در دسترس است، 1000 ساختمان به طور تصادفی از جمعیت اصلی 19158 موجود در بشیکتاش (5.2 درصد از کل جمعیت) نمونه برداری شدند. ساختمان های انتخاب شده 1523 سیاست را با توزیع نسبی از نظر کاربری، آپارتمان ها و ادارات که در شکل 5 نشان داده شده است، پوشش دادند .
داده های انتخاب شده و مورد استفاده برای آموزش یک موتور رگرسیون لجستیک که شکل عملکردی آن عبارت است از:
p ( صnمن) ~β0+ ∑βj∗ a t trj�(���)~�0+∑��∗�����
که در آن p ( pn i ) نشان دهنده احتمال یافتن تعدادی خط مشی متعلق به بازه i در یک ساختمان است و β j ضریب رگرسیون ویژگی j است . ویژگی های در نظر گرفته شده (در دسترس برای ساختمان های نمونه) در جدول 1 فهرست شده است . متغیری که تعداد سیاست ها را کد می کند به پنج بازه تقسیم شده است که در جدول 2 نشان داده شده است .

جدول 1. ویژگی های مورد استفاده برای محدود کردن رگرسیون لجستیک.
جدول 2. ماتریس سردرگمی که تعداد سیاست های پیش بینی شده و مشاهده شده را برای مجموعه داده آزمایشی 10000 در بشیکتاش مقایسه می کند.
از تجزیه و تحلیل ضرایب محاسبه شده با رگرسیون می توان به این نکته اشاره کرد که متغیرهای طبقه ، آپارتمان و ادارات با تعداد سیاست ها همبستگی مثبت دارند، در حالی که متغیرهای کاربری (مختلط مسکونی) و پارکینگ .یک همبستگی منفی، نسبتا قوی برای نوع استفاده «مختلط مسکونی» نشان میدهد. تعداد سیاستهای بهدستآمده توسط رگرسیون محاسبهشده با موارد مشاهدهشده برای مجموعه دادههای بیشتر از 10000 ساختمان که با ساختمان مورد استفاده برای آموزش همبستگی ندارند، مقایسه شده است. الگوریتم رگرسیون برای هر ساختمان آزمایش شده احتمال یافتن تعدادی خط مشی را در یکی از پنج بازه زمانی فراهم می کند: 0، 1-2، 3-5، 6-10، و >10. این احتمالات را می توان برای محاسبه یک شاخص اسکالر منفرد که نشان دهنده “مستعد بودن” ساختمان های در نظر گرفته شده برای میزبانی بیمه نامه های زلزله جمع آوری شد (به معادله (2) مراجعه کنید:
من n de x =15∑ من ∗پمن�����=15∑�∗��
ماتریس سردرگمی مقایسه در جدول 2 نشان داده شده است . جدول نشان می دهد که رگرسیون لجستیک می تواند روند همبستگی کلی بین ویژگی های در نظر گرفته شده و تعداد خط مشی ها را به تصویر بکشد، اما نمی تواند به طور دقیق بازه خاصی را استنتاج کند. از یک طرف، این می تواند به دلیل سوگیری طبیعی مجموعه آموزشی و آزمایشی باشد، زیرا ساختمان هایی که کاندیدای خوبی برای داشتن خط مشی هستند، لزوماً قبلاً توسط TCIP که نفوذی نزدیک به 40٪ در شهر داشت، به دست نیامده است. این داده ها منتشر شد.
کاوش دقیقتر رویکردهای مختلف پیشبینی قطعاً عملکرد فرآیند استنتاج را بهبود میبخشد. همچنین توجه به این نکته مهم است که برای اینکه نمونهگیری پیشبینیکننده مفید باشد، باید روند همبستگی کلی را به منظور بهینهسازی بیشتر محاسبات نقشههای تمرکز و در نتیجه بررسی میدانی به دست آورد.
4. نقشه برداری موبایل
برای گرفتن سریع داده های تصویر درجا ، یک سیستم نقشه برداری سیار (GFZ-MOMA) توسعه یافته و به طور گسترده آزمایش شده است [ 25 ، 26 ]. این سیستم از یک دوربین همه جهته Ladybug3 از Point Gray Research Ltd.، یک واحد جمعآوری و ذخیرهسازی داده، یک واحد ناوبری و یک بسته باتری خارجی تشکیل شده است که تا 6 ساعت کارکرد مستقل انرژی را تامین میکند (شکل 6 ) .
دوربین Ladybug3 ( برای مشخصات فنی کامل به http://www.ptgrey.com/ مراجعه کنید) از شش حسگر رنگی نیمه هادی اکسید فلزی (CMOS) تشکیل شده است که توالی تصویر همزمان را با سرعت اکتساب حداکثر 15 فریم در ثانیه (فریم) می گیرد. در هر ثانیه). شش جریان تصویر تکدوربین همگامسازی میشوند و بهطور خودکار به فرمت همهجهت (پانوراما) با وضوح بالا (5700 × 2700 پیکسل) با فشردهسازی JPEG دوخته میشوند. سیستم دوربین از داخل خودرو کار میکند و با یک سیستم نصب ساده متشکل از یک قاب آلومینیومی سبک وزن و چهار فنجان مکش با قدرت بالا، روی سقف خودرو نصب میشود.
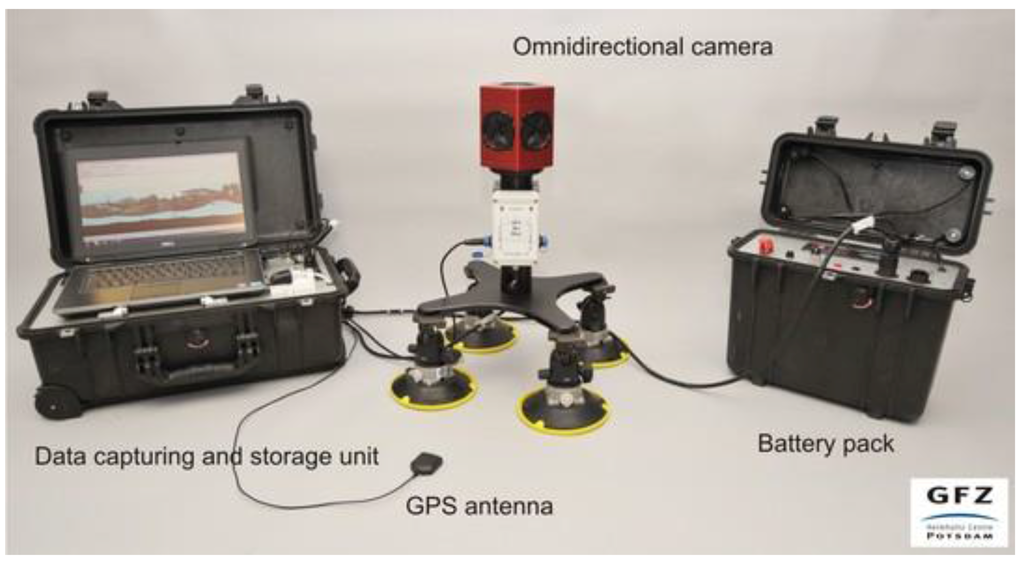
شکل 6. سیستم نقشه برداری تلفن همراه همه جهته GFZ-MOMA با واحد جمع آوری و ذخیره داده و بسته باتری.
واحد جمعآوری و ذخیرهسازی دادهها با تمرکز ویژه بر سهولت استفاده و ناهمواری برای کاربردهای قوی در فضای باز، حتی در شرایط ناهموار (مانند جادههای آسفالت نشده، گرد و غبار) توسعه یافته است. جزء اصلی دستگاه یک نوت بوک استاندارد با هارد دیسک سریال ATA 750 گیگابایتی است. یک گیرنده جی پی اس درجه تجاری، مکان یابی جغرافیایی را با نرخ دوره ای 1 هرتز فراهم می کند. یک واحد اندازه گیری اینرسی اختیاری (IMU) می تواند برای ضبط داده های اضافی در مورد وضعیت دوربین سه بعدی استفاده شود. نوت بوک و تمام اجزای دیگر در یک محفظه پلاستیکی سخت ثابت شده اند. یک برنامه نرم افزاری طراحی شده سفارشی، جریان های مختلف داده ای را که از دوربین، GPS و IMU می آیند، ضبط، همگام سازی و ذخیره می کند. همگام سازی داده ها، در 125 میلی ثانیه، بر اساس تایمر تعبیه شده در کنترلر سخت افزار ieee-1394B است.
واحد ناوبری از QGIS، یک محیط رایگان و منبع باز GIS، به عنوان جزء نرم افزار اصلی برای ردیابی مکان و ناوبری خودرو استفاده می کند. رابط نقشه آن قادر است نقشه های پس زمینه مختلف منطقه مورد مطالعه را ترکیب کند و مناطق و مسیرهای نمونه از پیش محاسبه شده را نمایش دهد. موقعیت را می توان در زمان واقعی با عملکرد ردیابی زنده GPS ردیابی و نمایش داد. این به یک اپراتور اجازه می دهد تا نه تنها ماشین را در مسیرهای از پیش محاسبه شده هدایت کند، بلکه مسیر را در حین پرواز برای مقابله با شرایط محیطی غیرمنتظره (مانند ترافیک یا مسدود شدن جاده) تغییر دهد.
5. نتایج
5.1. طراحی نظرسنجی
هدف از رویکرد کلی جمع آوری کارآمد داده های بصری در مورد ساختمان های احتمالاً آسیب دیده در یک محیط شهری واقعی است. آزمایش در مقیاس کامل در یک موقعیت پس از زلزله هنوز امکان پذیر نیست، از این رو به منظور ارزیابی عملکرد مورد انتظار سیستم در یک محیط واقعی، جمع آوری داده های قبل از رویداد در منطقه مورد مطالعه انجام شده است. نظرسنجی با فرمت دو مرحله ای و با نمونه گیری و مسیریابی تکراری طراحی شده است. یک نقشه تمرکز همانطور که در بخش 3 توضیح داده شد با رویکرد ادغام خطی (افزودنی) به منظور گسترش دامنه بررسی ایجاد شد ، زیرا بیشتر یک نقشه قبل از رویداد در نظر گرفته می شد. نقشه تمرکز حاصل برای اولین روز اکتساب در شکل 7 ارائه شده است .
در مورد ما از مجموعه داده های زیر استفاده شده است:
-
توزیع ساختمان ها، همچنین با در نظر گرفتن تراکم سیاست ها (تعداد سیاست ها در هر ساختمان)،
-
نقشه خطر از نظر PGV مورد انتظار با احتمال بیش از 10٪ در 50 سال.
مورد دوم نشان دهنده یک نماینده برای مکان مورد انتظار آسیب ساختمان، در غیاب یک سناریوی خاص است، در حالی که مجموعه داده اول هم توزیع فضایی ساختمان ها و هم توزیع متغیر سیاست ها را رمزگذاری می کند. لایه ها با یک رویکرد خطی استاندارد، با استفاده از کران های رد (1٪، 99٪) نرمال سازی شده اند (برای جزئیات بیشتر در مورد تکنیک های عادی سازی موجود، [ 11 ] را ببینید ).
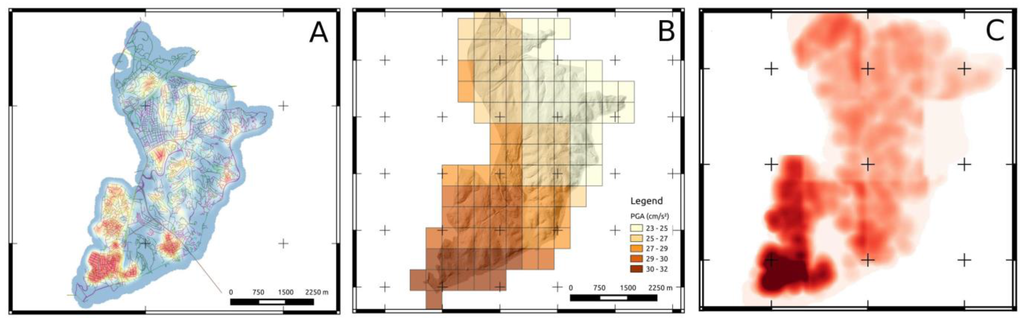
شکل 7. محاسبه نقشه تمرکز قبل از رویداد. ( الف ) توزیع فضایی ساختمانها با تعداد سیاستهای مرتبط با زلزله. ( ب ) خطر لرزه ای مورد انتظار (PGA) با احتمال بیش از 10٪ در 50 سال. ( C ) نقشه تمرکز حاصل از ادغام خطی لایه های نرمال شده با وزن (0.7،0.3) به دست آمده است.
به دو لایه وزن های مربوطه اختصاص داده شده است (0.7، 0.3)، بنابراین اولویت را به محل سیاست ها می دهند، اما خطر مورد انتظار را نیز در نظر می گیرند (از این رو آسیب مورد انتظار). نقشه فوکوس سطح دوم با در نظر گرفتن چند ضلعی در اطراف مسیر هندسی به دست آمده از نقشه فوکوس اول به عنوان لایه اضافی محاسبه شده است و با استفاده از وزن منفی در فاز ادغام در نظر گرفته شده است. سپس دو مجموعه نمونهبرداری با طرح نمونهگیری PPS تولید شد (به بخش 3 و [ 11 ، 12 ] مراجعه کنید). دو نقشه فوکوس و مسیرهای بهینه شده مربوطه در شکل 7 نشان داده شده است. همانطور که از شکل مشاهده می شود، مسیرهای بهینه شده برای یک بررسی چند مرحله ای دو روزه، پوشش خوبی از مناطقی که نقشه های فوکوس دارای مقادیر بالاتری هستند، با مقدار کمی برهم نهی فراهم می کند. مسیریابی روز دوم نه تنها از نقشه فوکوس زیرین پیروی می کند، بلکه مسیر ثبت شده قبلی را نیز در نظر می گیرد. جدول 3 ویژگی های هندسی اصلی دو بررسی جداگانه را فهرست می کند. مسافت کلی که انتظار می رود طی شود حدود 145 کیلومتر است. در شرایط عادی (در محیط های شهری) یک سیستم نقشه برداری سیار می تواند بین 80 تا 120 کیلومتر را در بازه زمانی 6 تا 8 ساعت پوشش دهد. نظرسنجی روز اول در همین راستا است، در حالی که نظرسنجی در روز دوم کوتاهتر است و میتوان آن را یک نظرسنجی اصلاحی در نظر گرفت.
شبیه سازی یک نظرسنجی پس از رویداد نیز با استفاده از داده های موجود انجام شده است. یک نقشه تمرکز (نگاه کنید به شکل 8 D) بر اساس ادغام ورود به سیستم خطی (ضربی) در این مورد پیشنهاد شده است، زیرا سطح انتخابی بالاتری باید به منظور بهینهسازی تلاشهای نظرسنجی جستجو شود. به منظور شبیه سازی یک مورد واقعی تر، لایه های اساسی مورد استفاده در مورد قبل از رویداد (توزیع ساختمان ها / سیاست ها و خطر لرزه ای) در نظر گرفته شده است. یک لایه بیشتر که توزیع فضایی مورد انتظار انسداد جاده ها را توصیف می کند اضافه شده است (نمایش داده شده در شکل 8 C). این را می توان در یک مورد واقعی با توزیع آسیب مورد انتظار از مشاهدات ماهواره ای/هوایی یا در محل ادغام کرد.اطلاعات ارائه شده توسط مقامات محلی علاوه بر این، میتوان از این اطلاعات برای محدود کردن بهینهسازی مسیر استفاده کرد، بهعنوان مثال با اختصاص هزینههای بالاتر به بخشهای مسیر با عرض کاهشیافته (مثلاً جادههای جانبی کوچک که در منطقه بشیکتاش مکرر هستند) در مناطقی که در معرض ریزش هستند، که بیشتر در معرض انسداد هستند. به دلیل آوار
جدول 3. خلاصه بررسی 2 مرحله ای طراحی شده برای منطقه بشیکتاش.
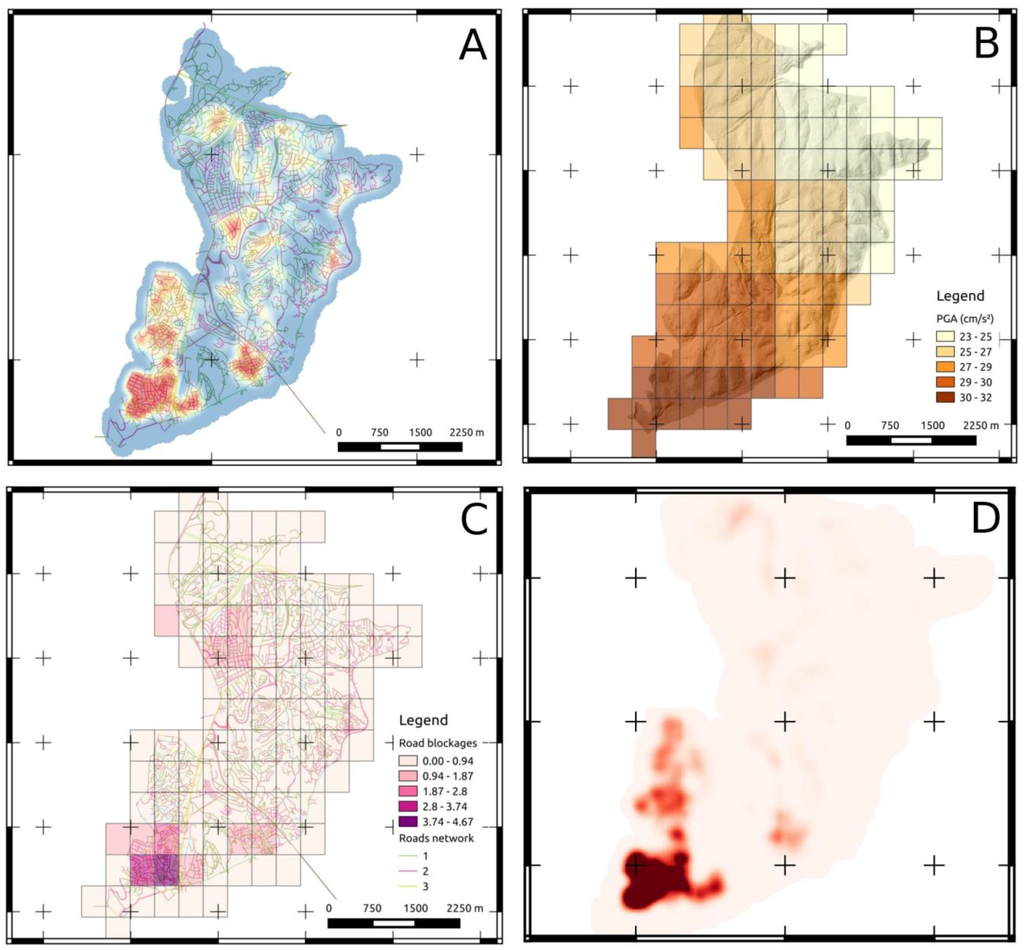
شکل 8. محاسبه نقشه تمرکز پس از رویداد. ( الف ) توزیع فضایی ساختمانها با تعداد سیاستهای مرتبط با زلزله. ( ب ) خطر لرزه ای مورد انتظار (PGA) با احتمال بیش از 10٪ در 50 سال. ( ج ) توزیع فضایی مورد انتظار انسداد جاده ها. ( D ) نقشه تمرکز حاصل از ادغام خطی ورود به سیستم از لایه های نرمال شده به دست می آید.
به منظور اجرای بررسی واقعی، یک مجموعه نمونه باید پس از نقشه تمرکز قبل از رویداد تولید و سپس مسیریابی شود. مسیرهای بهینه شده برای یک بررسی دو روزه در شکل 9 نشان داده شده است . فواصل خطی مورد انتظار تحت پوشش مسیرهای محاسبه شده در جدول 3 آمده است . بر اساس این مسیرها، سیستم نقشه برداری سیار شرح داده شده در بخش 4 به صورت میدانی مستقر شده و عملیاتی شده است. در بخش های بعدی، نتایج فعالیت های میدانی مورد بحث قرار می گیرد.
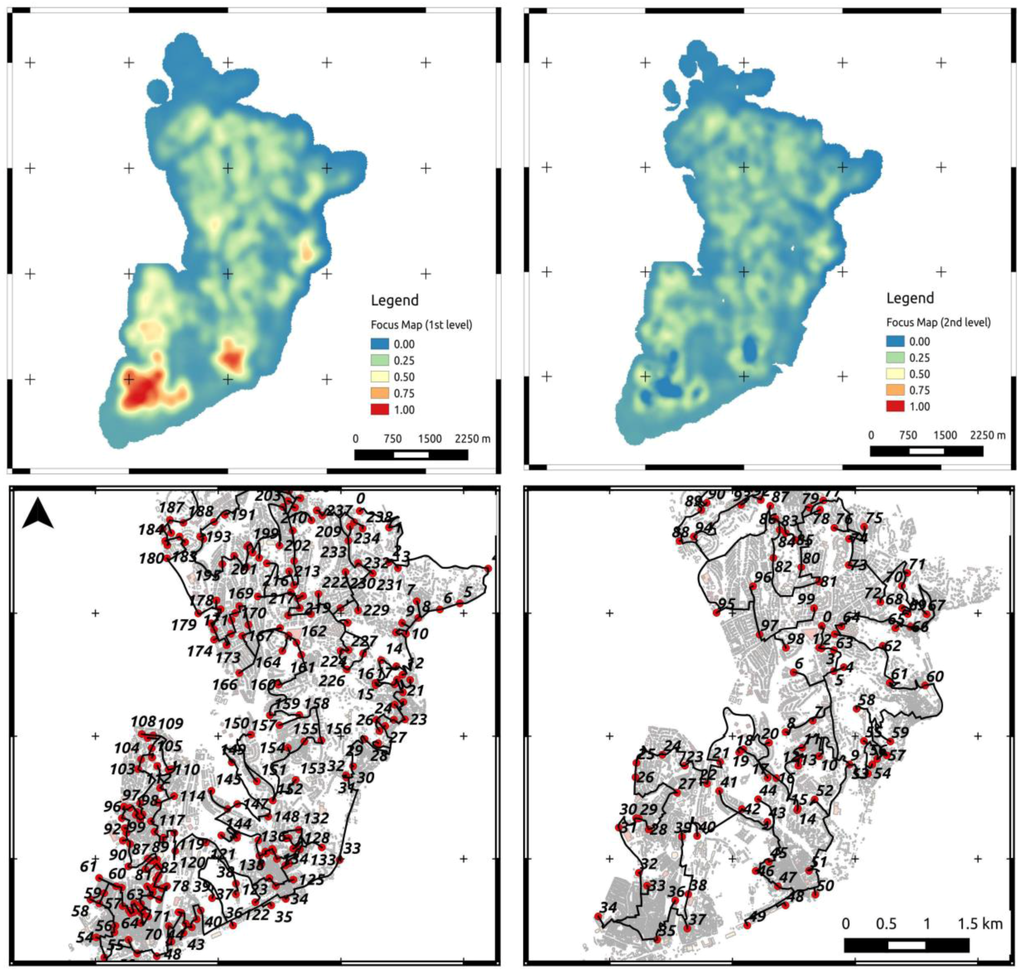
شکل 9. نمونه گیری و مسیریابی تکراری، چند مرحله ای برای یک بررسی دو روزه. ردیف بالا نقشه تمرکز سطح اول محاسبه شده ( سمت چپ ) و نقشه تمرکز سطح دوم ( راست ) را نشان می دهد که با در نظر گرفتن نقشه فوکوس سطح اول به عنوان لایه اضافی (با وزن منفی) به دست آمده است. ردیف پایین مسیریابی بهینه شده برای روز اول و روز دوم را با توجه به مسیر روز اول نشان می دهد.
5.2. طول و سرعت نظرسنجی
طول بررسی های واقعی در جدول 4 فهرست شده است . در مجموع، حدود 120 کیلومتر در حدود 10 ساعت طی شده است که بین دو روز تقسیم شده است. همانطور که با مقایسه جدول 3 و جدول 4 می توان اشاره کرد ، مسیرهایی که توسط سیستم نقشه برداری سیار دنبال می شود کمی با مسیرهای بهینه شده متفاوت است. شایع ترین دلایل انحراف از مسیرهای اصلی عبارتند از ناهماهنگی در مسیریابی به دلیل کمبود اطلاعات در مورد شبکه های جاده ای (اطلاعات در مورد خیابان های یک طرفه در دسترس نبود) یا مسائل دسترسی مربوط به مسدود شدن غیرمنتظره جاده ها.
جدول 4. خلاصه ای از نظرسنجی دو روزه انجام شده در بشیکتاش.
در شکل 10 سرعت خودروی حامل سیستم نقشه برداری سیار در طول بررسی نشان داده شده است. میانگین سرعت در این بررسی دو روزه حدود 12 کیلومتر در ساعت است، اما تعدادی مکان وجود دارد که سرعت به حدود 5 کیلومتر در ساعت کاهش یافته است. این بیشتر به دلیل ماهیت پیچیده منطقه انتخاب شده است، با خیابان های بسیار باریک (گاهی فقط چند سانتی متر بزرگتر از ماشین) که اغلب مملو از مردم و وسایل نقلیه تجاری است.
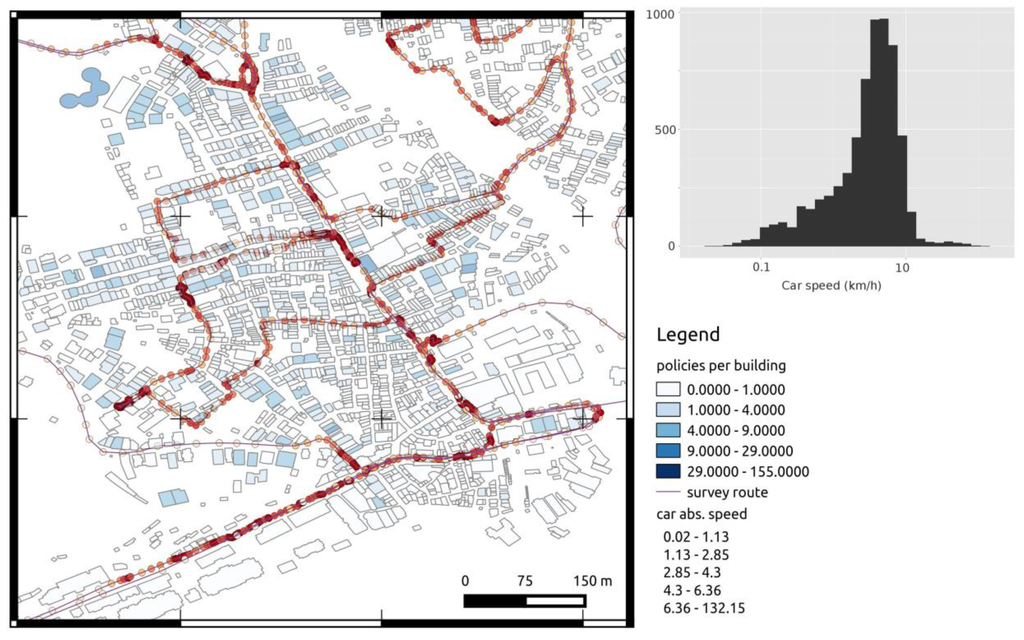
شکل 10. رنگ ردیابی متناسب با سرعت مطلق سیستم نقشه برداری سیار ( سمت چپ) است . توزیع سرعت در طول بررسی (مقیاس لگاریتمی) بر حسب کیلومتر بر ساعت ( سمت راست) .
5.3. پوشش نظرسنجی
به منظور ارزیابی عملکرد سیستم با توجه به محدوده مورد نظر آن، که مجموعه ای از اطلاعات بصری در محیط ساخته شده است، یک تحلیل دید روی داده های جمع آوری شده انجام شده است. هدف از تجزیه و تحلیل، ارزیابی پوشش مورد انتظار از نظر ساختمان ها و سیاست ها، و برجسته کردن مسائل احتمالی مرتبط با استفاده از سیستم نقشه برداری سیار پیشنهادی بود. یک تجزیه و تحلیل تجمعی viewshed [ 27 ] در طول مسیر دنبال شده توسط سیستم نقشه برداری متحرک برای انتخاب تمام ساختمان هایی که به طور بالقوه از مکان های تصویر به دست آمده قابل مشاهده هستند، انجام شده است ( شکل 11) .). الگوریتم به صورت تکراری از میان مجموعهای از نقاط ورودی حلقه میزند و نقشههای مشاهده شده را محاسبه میکند، که منطقه جغرافیایی را نشان میدهد که از نقطه ورودی با اطلاعات ارتفاع دیجیتال قابل مشاهده است. به عنوان اطلاعات ورودی ورودی، از DSM منطقه مورد مطالعه استفاده شده است، نقاط ناظر در طول مسیر بررسی در ارتفاع 3 متری از سطح زمین (ارتفاع واقعی دوربین همه جهته نصب شده بر روی خودرو) با فاصله مساوی 20 متر تنظیم شده است. حداکثر فاصله دید 30 متر خروجی یک نقشه تجمعی است که سلولهای شطرنجی به تعداد مکانهای ورودی که دارای قابلیت دید هستند اختصاص داده میشود. یک تقاطع فضایی با ردپای ساختمان، تخمینی از ساختمان هایی را ارائه می دهد که به طور بالقوه از مسیر بررسی شده قابل مشاهده هستند.جدول 4 . بر اساس تجزیه و تحلیل دیدگاه، تخمین زده می شود که بیش از 7000 ساختمان، معادل تقریبا 20000 سیاست، توسط سیستم نقشه برداری سیار تسخیر شده است. این معادل 37.5 درصد از کل موجودی ساختمان و 44 درصد از کل تعداد سیاست ها در منطقه مورد مطالعه است.
به منظور تجزیه و تحلیل بیشتر دید تحت در نظر گرفتن فاکتورهای انسدادی که نمی توان در تحلیل نمای دید در نظر گرفت (به عنوان مثال، پوشش گیاهی، اتومبیل ها، دیوارها و غیره) .)، مجموعه ای از 1000 ساختمان به طور تصادفی از ساختمان هایی که به طور بالقوه قابل رویت با تجزیه و تحلیل نمای نمای شناسایی شده بودند، نمونه برداری شده است. از یک اپراتور خواسته شده است تا ساختمان های انتخاب شده را به صورت دستی در جریان همه جانبه قرار دهد و ارزیابی کند که آیا واقعاً قابل مشاهده هستند (حداقل تا حدی) یا پنهان. اپراتور باید نوع انسداد را گزارش میکرد، حتی زمانی که ساختمان انتخاب شده برای هدف بررسی قابل مشاهده در نظر گرفته میشد، و سایر موارد مربوط به تجزیه و تحلیل درخواستی را یادداشت میکرد. حداقل 50 درصد از ساختمان باید قابل مشاهده باشد تا برچسب قابل مشاهده به آن اختصاص داده شود. یک محیط دسکتاپ Remote Rapid Visual Screening (RRVS) برای انجام تجزیه و تحلیل تصویر، همانطور که در [ 28 ] توضیح داده شده است، تنظیم شده است . در جدول 5نتایج تجزیه و تحلیل دقیق انسداد گزارش شده است.
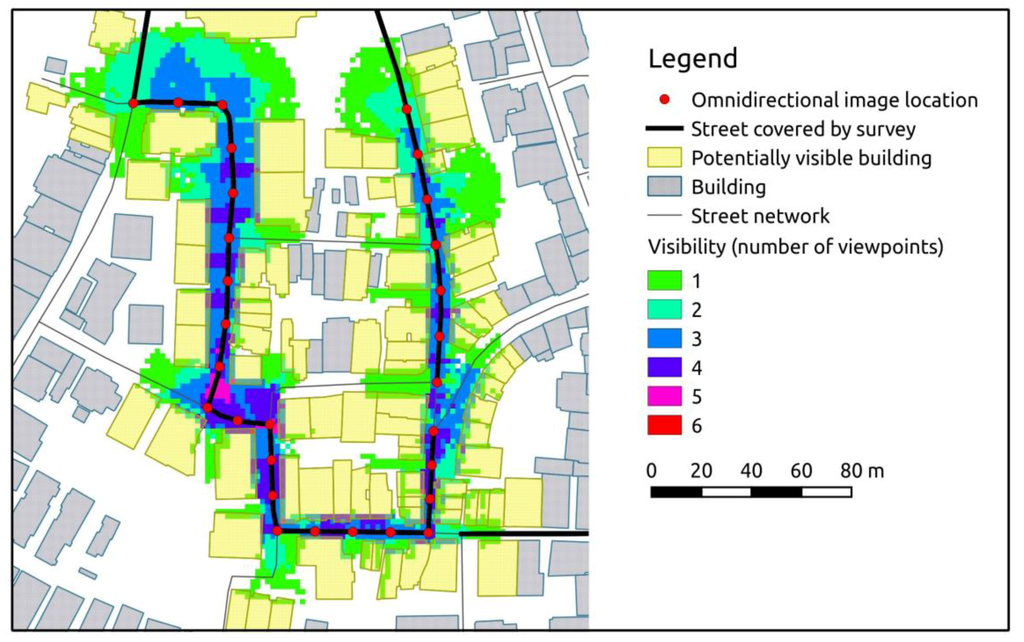
شکل 11. تجزیه و تحلیل دید بر اساس برآورد دیدگاه برای زیرمجموعه ای از ساختمان ها که به صورت تئوری توسط سیستم نقشه برداری متحرک تصویر شده اند.
اپراتور یک دانشجوی دانشگاه با تجربه در سنجش از دور و نقشه برداری دسکتاپ بود. ارزیابی دسکتاپ در یک هفته با در نظر گرفتن میانگین 5 تا 6 هکتار در روز انجام شد. در کاربرد عملی، پروفیل های اپراتورهای مختلف را می توان برای انجام وظایف مختلف به کار گرفت. به عنوان مثال، اپراتورهای غیر ماهر را می توان برای غربالگری بسیار سریع داده های گرفته شده به کار گرفت (به عنوان مثال، تقسیم ساختمان آسیب دیده به دسته های بسیار درشت)، در حالی که مهندسان، معماران آموزش دیده، و تنظیم کنندگان ادعا باید به تجزیه و تحلیل دقیق تری از اطلاعات جمع آوری شده
از کل ساختمان های مورد تجزیه و تحلیل، 79٪ قابل مشاهده یا تا حدی قابل مشاهده هستند، در حالی که حدود 21٪ قابل مشاهده نیستند. در میان ساختمان های قابل مشاهده، بیشترین انسداد توسط ساختمان های دیگر و پس از آن پوشش گیاهی (بیشتر درختان) نشان داده شده است. جالب توجه است، شایع ترین علت انسداد کامل پوشش گیاهی است، اما بخش قابل توجهی (34٪ در آزمایش خاص) به تعدادی از علل مختلف، اغلب موقتی، به عنوان مثال سایر وسایل نقلیه در حال عبور، یا تبلیغات مرتبط است.
جدول 5. نتایج تجزیه و تحلیل انسداد در یک نمونه گیری تصادفی از 996 ساختمان در نمای اطراف مسیر بررسی انجام شده است.
5.4. دقت موقعیت یابی GPS
اگر چه به طور کلی دقت موقعیت یابی سیستم نقشه برداری سیار برای کار در نظر گرفته شده (از 2 تا 5 متر) کافی است، اما در موارد متعددی به دلیل دریافت سیگنال GPS ضعیف، سیستم با مشکلاتی در ارجاع جغرافیایی تصاویر مواجه شد. این مشکل، به ویژه در مناطقی با تراکم ساختمانهای بیشتر و وجود «درههای شهری»، باعث نابجای مسیر بررسی، با خطاهای موقعیتیابی از چند متر تا بیش از 30 متر شد. از آنجایی که این می تواند بر شناسایی صحیح ساختمان مورد نظر تأثیر بگذارد، در مرحله تجزیه و تحلیل آفلاین از اپراتور خواسته شد تا ارزیابی کند که آیا ناهماهنگی در موقعیت یابی به طور جدی خود روند تحلیل را مختل می کند یا خیر. توجه شده است که از 1000 ساختمان در نظر گرفته شده، در حدود 120 مورد (~ 12٪) مختصات تصویر نادرست به نظر می رسید (با قضاوت بصری توسط اپراتور). در بیشتر موارد، اپراتور هنوز هم میتوانست ساختمان مورد نظر را با وجود خطای ارجاع جغرافیایی پیدا کند. در 45 مورد، اپراتور نتوانست ساختمان را در آزمون بازیابی کند، بنابراین ساختمان را غیرقابل مشاهده اعلام کرد. حتی اگر تأثیر این موضوع در آزمایش اولیه محدود بود و بر 4.5٪ از نمونهها تأثیر میگذاشت، مسئله فناوری باید در مرحله عملیاتی مورد توجه قرار گیرد.
5.5. کیفیت تصویر
نمونه ای از تصاویر جمع آوری شده در طول بررسی در شکل 12 ارائه شده است . تصاویر با سرعت تقریبی 6 فریم در ثانیه جمع آوری شدند و در مجموع حدود 700 گیگابایت داده در طول بررسی دو روزه جمع آوری شد. تصاویر همه جانبه با دوخت پویا از جریان های ویدئویی خام گرفته شده توسط شش دوربین جداگانه به دست می آیند. تصویر به دست آمده دارای میدان دید 360 درجه افقی و حدود 170 درجه عمودی با وضوح حدود 12 مگاپیکسل است. یک مثال در شکل 13 نشان داده شده است. کیفیت تصاویر، ارزیابی شده در طول تجزیه و تحلیل دید که در بخش قبل توضیح داده شد، برای هدف سیستم، که ارزیابی سریع آسیب متوسط تا گسترده است، کافی در نظر گرفته شده است. وضوح تصاویر امکان تشخیص ویژگی های شرح داده شده در شکل 12 را فراهم می کند . علاوه بر این، فرمت پانوراما تصاویر امکان تجزیه و تحلیل شهودی و کامل از محیط ساخته شده را فراهم می کند، به ویژه مناسب در خیابان های باریک که مشخصه منطقه انتخاب شده است.
شاتر سیستم به طور خودکار توسط نرم افزار سیستم دوربین مدیریت می شود و به طور مداوم به روز می شود تا در صورت وجود اختلاف روشنایی شدید، ظاهری متعادل از تصویر به دست آید. این به سیستم اجازه می دهد تا به سرعت تغییرات ناگهانی در روشنایی محیط را جبران کند. این با مقایسه تصاویر در شکل 13 A و شکل 13 B نشان داده شده است. با این وجود، حتی عکس گرفته شده در شرایط تاریک و بارانی برای ارزیابی ساختمان مناسب بود.

شکل 12. نمونه ای از یک تصویر همه جهته که آسیب (غیر سازه ای) یک ساختمان را نشان می دهد. فاصله بین ساختمان و دوربین حدود 20 متر است. آسیب در قسمت پایین تصویر، دایره ای به رنگ زرد قابل مشاهده است. ورودی سمت راست بالا موقعیت جغرافیایی تصویر همه جهته گرفته شده را نشان می دهد.

شکل 13. بخش بالایی: نمونه ای از تصویر همه جهته. بخش پایینی: ( الف ) بازپخش مستطیلی جزئی تصویر همه جهته. فقط بخشی از تصویر اصلی قابل مشاهده است، اما اپراتور می تواند به صورت پویا زاویه دید، جهت و بزرگنمایی ظاهری را در تصویر دوباره پرتاب شده تغییر دهد. ( ب ) نمایش مستقیم یک تصویر همه جهته که در مکان نمونه در زمان متفاوت و با هوای بارانی گرفته شده است.
5.6. وابستگی به نمونه برداری و مسیریابی
در یک بررسی تک مرحله ای، پارامتری که مستقیماً بر طراحی پیمایش حاصل تأثیر می گذارد، تعداد نقاطی است که برای تولید مجموعه نمونه استفاده می شود. آزمونی به منظور ارزیابی چگونگی ارتباط حجم مجموعه نمونهگیری با گستره و پوشش نظرسنجی حاصل انجام شده است. این می تواند برای تنظیم طول بررسی به طور مستقل بر روی نقشه تمرکز که اولویت بندی فضایی را هدایت می کند استفاده شود.
چهار نظرسنجی مختلف برای چهار مجموعه نمونهگیری مختلف، به ترتیب حاوی 50، 100، 200، و 400 امتیاز (به عنوان حجم نمونه، sd ) ایجاد شده است. هر مجموعه نمونه برداری پس از همان نقشه تمرکز و پیروی از طرح نمونه برداری PPS یکسان تولید شده است ( شکل 14 را ببینید ).
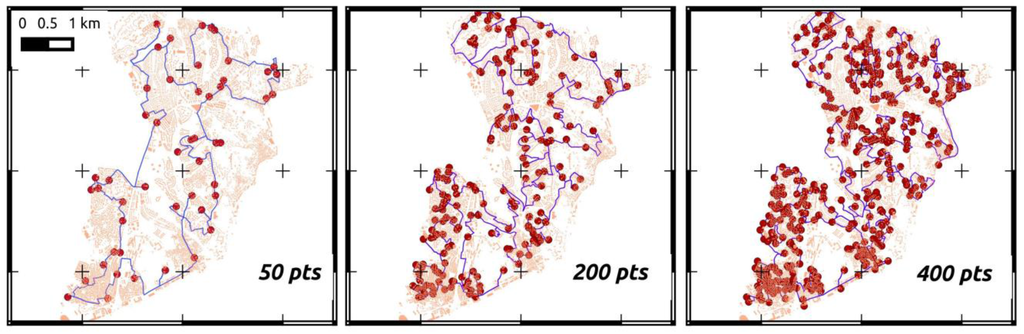
شکل 14. مقایسه بین نظرسنجی های مختلف تک مرحله ای بر اساس مجموعه های نمونه مختلف. از سمت چپ، نتایج برای مجموعه های نمونه 50، 200 و 400 نقطه ای نشان داده می شود.

شکل 15. مقایسه بین طول مسیر حاصل در حالت بهینه (نقاط آبی) و در حالت تصادفی (نقاط سیاه با نقاط قرمز) ( بالا) . همانطور که نمودار نشان می دهد، طول مسیر با جذر ابعاد مجموعه نمونه متناسب است و مسیر تصادفی به طور سیستماتیک طولانی تر است. مقایسه تعداد مورد انتظار سیاست های تحت پوشش با توجه به طول مسیر (بر حسب کیلومتر) برای نمونه گیری تصادفی (خط سیاه، نقاط قرمز) و نمونه برداری متمرکز (خط آبی، نقاط آبی) (پایین) . این رابطه برای نمونه گیری متمرکز ظاهرا خطی است، در حالی که به نظر می رسد برای نمونه گیری تصادفی خطی نیست، که در هر صورت کارایی بسیار کمتری دارد.
جدول 6. همبستگی تجربی بین ابعاد مجموعههای نمونه، طول بررسی حاصل (بر حسب کیلومتر)، و تعداد ساختمانهای سرپوشیده ( یعنی در یک بافر 30 متری از مسیر رانده شده قرار دارند).
در جدول 6 همبستگی تجربی بین بعد مجموعه نمونه و طول بر حسب کیلومتر بررسی حاصل گزارش شده است. همانطور که توسط نمودار در شکل 15 (بالا) نشان داده شده است، طول L مسیر حاصل با جذر اندازه نمونه sd متناسب است :
L =α0+α1s d––√�=�0+�1سد
که در آن ضرایب برازش 0 = -0.7561 α و α 1 = 5.1925، و مقدار r-squared 0.9972 است.
از آنجایی که بسته به مکان انتخاب شده، سرعت متوسط سیستم نقشه برداری سیار را می توان تخمین زد، آگاهی از روابط بین مجموعه نمونه گیری و طول بررسی امکان آماده سازی کارآمدتر فعالیت های میدانی را فراهم می کند.
5.7. نظرسنجی متمرکز در مقابل نظرسنجی تصادفی
به منظور درک تأثیر واقعی رویکرد بهینهسازی پیشنهادی برای اجرای بررسیهای زمینی، مقایسه ای با یک نظرسنجی بر اساس نمونهگیری تصادفی از منطقه انتخاب شده در بشیکتاش انجام شده است.
علاوه بر مجموعههای نمونهبرداری تولید شده پس از یک نقشه تمرکز، همانطور که در بخش قبل توضیح داده شد، و در اینجا به عنوان “متمرکز” تعریف شد، مجموعهای موازی از نقاط، که به عنوان “تصادفی” نامیده میشود، با استفاده از یک طرح نمونهبرداری تصادفی ساده ایجاد شده است. مربوط به استفاده از یک نقشه تمرکز یکنواخت در منطقه انتخاب شده). مجموعه تصادفی به طور خودکار با استفاده از همان رویکرد متمرکز مسیریابی شده است، و مسیرهای حاصل با تخمین تعداد ساختمانها و تعداد سیاستهای مرتبطی که انتظار میرود در طول بررسیها تحت پوشش قرار گیرند، تحلیل شدهاند. تعداد ساختمان های سرپوشیده، یعنیساختمان هایی که بر اساس بررسی های انجام شده قابل بازرسی بصری هستند، با تعداد ساختمان هایی که در داخل یک بافر 30 متری در اطراف مسیر محاسبه شده قرار دارند، تقریب زده می شود. بنابراین تعداد بیمه نامه های تحت پوشش صرفاً مجموع بیمه نامه های مرتبط با ساختمان های تحت پوشش است. در جدول 7 مقایسه ای از دو رویکرد ارائه شده است. تفاوت بین برآوردهای محاسبه شده در دو مورد، که به صورت درصد در جدول 7 بیان شده است ، در معادله (4) تعریف شده است:
دمن f= 2( فo c u s e
d– r a n do m )( فo c u s e d+ r a n do m )دمن�=2(��جتوسهد–�آ�د�متر)(��جتوسهد+�آ�د�متر)
جدول 7. مقایسه بین مسیریابی بر اساس نمونه گیری تصادفی و مسیریابی بر اساس نمونه گیری متمرکز.
6. بحث
آزمون مقدماتی ارائه شده در بخش آخر، رابطه تجربی بین اندازه مجموعه نمونه بر اساس نقشه کانون مرجع، طول کلی بررسی (بر حسب کیلومتر) و پوشش بصری مورد انتظار از نظر ساختمان و مهمتر از آن را نشان می دهد. در این اپلیکیشن، بیمه نامه های زلزله. با توسعه چنین مدلهای تجربی، بهینهسازی و تنظیم کامل بررسیهای میدانی امکانپذیر است، هم اولویتهای کاربران کدگذاریشده در نقشه تمرکز و هم محدودیتهای مربوط به منابع موجود و شرایط محیطی.
با نگاهی به مقادیر جدول 7 و نمودارهای شکل 15 ، می توان اشاره کرد که نمونه گیری “متمرکز” به طور مداوم کارآمدتر از نمونه گیری “تصادفی” است. در مورد دوم، به عنوان مثال، طول مسیر به طور متوسط طولانی تر است.
تحت شرایط یکسان، بررسی متمرکز توانست به طور سیستماتیک ساختمان های بیشتری را با توجه به یک بررسی تصادفی ثبت کند. مقایسه بین پوشش سیاست حتی قوی تر است.
بنابراین، نظرسنجی متمرکز همیشه از نظرسنجی تصادفی در آزمونهای در نظر گرفته شده بهتر بود. ما باید تاکید کنیم که اینها ارزیابیهای اولیه هستند، بر اساس تعداد کمی از تحققها (چهار تحقق مربوط به مجموعههای نمونهگیری مختلف). آزمایشهای دقیقتری باید انجام شود (و پیشبینی میشود)، اما نتایج فعلی در حال حاضر نشانهای از پتانسیل رویکرد پیشنهادی ارائه میدهند. این نتایج تعجب آور نیستند، با توجه به اینکه نقشه تمرکز محاسبه شده احتمال درج مکان هایی با تراکم ساختمان ها و سیاست های بالاتر را افزایش می دهد.
انتظار میرود که رابطه بین طول مسیر و تعداد خطمشیهای تحت پوشش در مورد متمرکز با استفاده از طرح نمونهبرداری PPS خطی باشد (زیرا به طور خطی به تراکم ساختمانها و سیاستها بستگی دارد که تقریباً ثابت فرض میکنیم). این به راحتی قابل تأیید است و در شکل 15 (پایین) قابل مشاهده است.
7. نتیجه گیری
طرح گسترده بیمه زلزله به عنوان ابزاری قدرتمند برای به اشتراک گذاشتن ریسک اقتصادی ناشی از رویدادهای لرزهای با احتمال کم و تاثیر زیاد و در عین حال تقویت مرحله بهبود بعدی شناخته میشود. هرچه تسویه مطالبات پس از زلزله سریعتر و عادلانه تر باشد، شروع سریعتر جوامع آسیب دیده و تاب آوری کلی کشور آسیب دیده بیشتر خواهد بود. متأسفانه، مدیریت ادعا فرآیند پیچیده ای است که همیشه با تعداد ادعاهای ثبت شده یکنواخت نمی شود و در وقوع یک رویداد بزرگ در مناطقی با آسیب پذیری بالا و تراکم خط مشی بالا، می توان انتظار تعداد قابل توجهی از ادعاها را داشت. این رویداد می تواند ساختار عملیاتی استخر بیمه بلایای ترکیه (TCIP) را تحت تأثیر قرار دهد.
بررسی بصری سریع و کارآمد از سهام ساختمان بیمه شده (احتمالاً آسیب دیده) به طور قابل توجهی قابلیت های عملیاتی TCIP را در عواقب یک زلزله قدرتمند در استانبول افزایش می دهد. یک راه حل نوآورانه بر اساس استقرار یک سیستم نقشه برداری سیار چابک پیشنهاد شده است که عملیات میدانی آن از طریق یک رویکرد زمین آماری بهینه شده است.
به منظور آزمایش رویکرد پیشنهادی، یک آزمایش میدانی در بشیکتاش استانبول انجام شده است. منطقه انتخاب شده شامل ویژگی های متفاوتی است که در سایر مکان های شهر مشترک است، از این رو نمونه قابل توجهی از شرایط محیطی قابل انتظار در مقیاس جغرافیایی گسترده تر را ارائه می دهد.
این ارزیابی اولیه نشان میدهد که چگونه یک بهینهسازی دقیق پروتکلهای نمونهبرداری و مسیریابی میتواند نتایج بسیار بهتری نسبت به یک بررسی تصادفی ساده داشته باشد. به روشی مشابه به نظرسنجی های قبل از رویداد، ابتدا باید یک نقشه تمرکز ارزیابی شود تا نظرسنجی واقعی پس از رویداد بهینه شود. می توان از چندین مجموعه داده و اطلاعات جانبی استفاده کرد، از جمله:
-
توزیع یا تراکم ساختمان ها؛
-
توزیع یا تراکم سیاست ها؛
-
خسارت مورد انتظار (بر اساس سناریوهای از پیش محاسبه شده)؛
-
اطلاعات آسیب بر اساس ارزیابی سریع از طریق سنجش از راه دور یا بررسی های هوایی/پهپاد؛
-
خسارت مشاهده شده بر اساس ارزیابی میدانی یا گزارش های مقامات حفاظت مدنی.
سایر اطلاعات، مانند ارزیابی انسداد جاده به دلیل آوار و/یا فعالیتهای جستجو و نجات، احتمال آتشسوزی پس از زلزله، نقاط داغ روانسازی، و اطلاعات زمین لغزش نیز میتواند در نقشه تمرکز گنجانده شود. به عنوان عبارات جریمه اضافی در مرحله مسیریابی استفاده می شود.
با استفاده از روش پیشنهادی در مقیاس بزرگ می توان پیشرفت قابل توجهی در مدیریت ادعا به دست آورد. در مورد استانبول، هر وسیله ممکن برای بهینه سازی مدیریت ادعا باید دنبال شود تا تاب آوری جامعه بهبود یابد. آزمایشهای بیشتری در انتظار است، اما نتایج اولیه امیدوارکننده است. ما توصیه می کنیم که TCIP رویکرد پیشنهادی را در ساختار عملیاتی پیچیده ای که مدیریت ادعاها را هدایت می کند، پیاده سازی و تعبیه کند.
منابع
- بونهوف، ام. بولوت، اف. درسن، جی. ایکن، تی. مالین، PE؛ اکتار، ام. شکاف زلزله در جنوب استانبول. نات. اشتراک. 2013 ، 4 . [ Google Scholar ] [ CrossRef ]
- توکسوز، MN; Reilinger، RE; عروسک، سی جی; بارکا، AA; یالچین، شمال ازمیت (ترکیه) زلزله 17 اوت 1999: اولین گزارش. زلزله. Res. Lett. 1999 ، 70 ، 669-679. [ Google Scholar ] [ CrossRef ]
- بیبی، ا. Gönenç، R. جیکوبز، اس. کونویتز، جی. پرایس، R. اثرات اقتصادی زلزله های 1999 ترکیه ; انتشارات OECD: پاریس، فرانسه، 2000; پ. 47. [ Google Scholar ]
- اردیک، م. آیدین اوغلو، ن. فهجان، ی. سستیان، ک. دمیرچی اوغلو، م. سیاحی، ب. دوروکال، ای. اوزبی، سی. بیرو، ی. اکمان، اچ. ارزیابی خطر زلزله برای منطقه شهری استانبول. زمین مهندس مهندس Vib. 2003 ، 2 ، 1-23. [ Google Scholar ] [ CrossRef ]
- ارگینتاو، س. Reilinger، RE; چاکمک، ر. فلوید، ام. چاکر، ز. دوغان، یو. کینگ، RW; مک کلاسکی، اس. اوزنر، H. نقاط داغ زلزله استانبول: محدودیتهای ژئودتیکی در تجمع کرنش در امتداد گسلها در شکاف لرزهای مرمره. ژئوفیز. Res. Lett. 2014 ، 41 ، 5783-5788. [ Google Scholar ] [ CrossRef ]
- پارسونز، تی. احتمال زمین لرزه های M ≥ 7 در زیر دریای مرمره، ترکیه را دوباره محاسبه کرد. جی. ژئوفیس. Res. 2004 ، 109 . [ Google Scholar ] [ CrossRef ]
- استراسر، FO; بومر، جی جی. ششتیان، ک. اردیک، م. چاگنان، ز. آیریزاری، ج. گولا، X. لوکانتونی، ا. سابتا، اف. بال، IE; و همکاران مطالعه تطبیقی ابزارهای تخمین تلفات زلزله اروپا برای یک سناریو در استانبول. J. Earthq. مهندس 2008 ، 12 ، 246-256. [ Google Scholar ] [ CrossRef ]
- اردیک، م. دوروکال، E. خطر زلزله و کاهش آن در استانبول. نات. خطرات 2007 ، 44 ، 181-197. [ Google Scholar ] [ CrossRef ]
- گورنکو، EN; لستر، RR; ماهول، او. Gonulal، SO بیمه زلزله در ترکیه: تاریخچه استخر بیمه بلایای ترکیه ; بانک جهانی: واشنگتن، دی سی، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- دوروکال، ای. اردیک، م. سستیان، ک. خسارات مورد انتظار زلزله به ساختمانها در استانبول و پیامدهای آن بر عملکرد استخر بیمه بلایای ترکیه. در مجموعه مقالات کنفرانس بین المللی مخاطرات زمینی، ارزیابی ریسک فنی، اقتصادی و اجتماعی، لیلهامر، نروژ، 18 تا 21 ژوئن 2006.
- Pittore, M. Focus maps: ابزاری برای اولویت بندی جمع آوری داده ها برای ارزیابی کارآمد ریسک جغرافیایی. ان ژئوفیز. 2015 ، 58 . [ Google Scholar ] [ CrossRef ]
- کوکران، تکنیک های نمونه برداری WG ، ویرایش سوم. جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 1977. [ Google Scholar ]
- وانگ، J.-F. استین، ا. گائو، بی.-بی. جنرال الکتریک، Y. مروری بر نمونه برداری فضایی. تف کردن آمار 2012 ، 2 ، 1-14. [ Google Scholar ] [ CrossRef ]
- استیونز، دی.ال. اولسن، AR نمونه برداری متوازن فضایی از منابع طبیعی. مربا. آمار دانشیار 2004 ، 99 ، 262-278. [ Google Scholar ] [ CrossRef ]
- Grafström، A. در مورد طرح های نمونه گیری با احتمال نابرابر. Ph.D. پایان نامه، دانشگاه Umea، Umea، سوئد، 2010. [ Google Scholar ]
- خان، م.ا. گوپتا، معاون; موهارانا، اولویت بندی حوضه PC با استفاده از سنجش از دور و سیستم اطلاعات جغرافیایی: مطالعه موردی از گوهیا، هند. J. محیط خشک. 2001 ، 49 ، 465-475. [ Google Scholar ] [ CrossRef ]
- فنگ، جی. بای، ال. لیو، اس. سو، ایکس. هو، اچ. بهینه سازی تصمیم گیری برای نمونه برداری فضایی در دشت شمال چین، بر اساس دانش پیشینی سنجش از دور. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2012 . [ Google Scholar ] [ CrossRef ]
- Estoque، RC; Estoque، RS; مورایاما، ی. اولویت بندی مناطق برای توانبخشی با نظارت بر تغییر در پوشش گیاهی مبتنی بر بارنگی. ISPRS Int. J. Geo-Inf. 2012 ، 1 ، 46-68. [ Google Scholar ] [ CrossRef ]
- Altan, O. مقدمه. در اطلاعات جغرافیایی برای مدیریت بلایا و ریسک: مثالها و بهترین روشها . هیئت مشترک جوامع اطلاعات مکانی: کپنهاگ، دانمارک، 2010; pp. vii–x. [ Google Scholar ]
- کمیته شناسایی نیازهای داده برای تصمیم گیری بر اساس مکان، کمیته جغرافیا، شورای ملی تحقیقات. جامعه و کیفیت زندگی: نیازهای داده برای تصمیم گیری آگاهانه ؛ انتشارات آکادمی ملی: واشنگتن، دی سی، ایالات متحده آمریکا، 2002. [ Google Scholar ]
- جانسون، هوش مصنوعی؛ پترسون، CB; Fulton، JL (Eds.) سیستم های اطلاعات جغرافیایی (GIS) و نقشه برداری: رویه ها و استانداردها . ASTM: فیلادلفیا، پنسیلوانیا، 1992.
- Dilley, M. Hotspots Natural Disaster a Global Risk Analysis ; بانک جهانی: واشنگتن، دی سی، ایالات متحده آمریکا، 2005. [ Google Scholar ]
- Applegate، DL; Bixby، RM; چواتال، وی. Cook, WJ مسئله فروشنده دوره گرد: یک مطالعه محاسباتی . انتشارات دانشگاه پرینستون: پرینستون، نیوجرسی، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- Dijkstra، EW یادداشتی در مورد دو مشکل در ارتباط با نمودارها. عدد. ریاضی. 1959 ، 1 ، 269-271. [ Google Scholar ] [ CrossRef ]
- ویلند، ام. پیتور، ام. پارولای، س. Zschau، J. مولدوبکوف، بی. بگالیف، U. برآورد موجودی ساختمان برای ارزیابی سریع آسیبپذیری لرزهای: به سوی یک رویکرد یکپارچه مبتنی بر تصویربرداری چند منبع. SDEE Soil Dyn. زمین مهندس 2012 ، 36 ، 70-83. [ Google Scholar ] [ CrossRef ]
- پیتور، ام. Wieland، M. به سوی ارزیابی آسیبپذیری لرزهای احتمالی سریع با استفاده از سنجش از دور ماهوارهای و زمینی. نات. خطرات 2012 ، 68 ، 115-145. [ Google Scholar ] [ CrossRef ]
- هاورکورت، اچ. توما، ال. Zhuang، Y. محاسبات دید در زمین در حافظه خارجی. J. Exp. Algorithmics 2009 , 13 . [ Google Scholar ] [ CrossRef ]
- ویلند، ام. پیتور، ام. پارولای، س. بگالیف، یو. یاسونوف، پ. تیاگونوف، اس. مولدوبکوف، بی. سعیدی، س. ایلیاسف، آی. آباکانوف، تی. یک مدل مواجهه چند مقیاسی برای ارزیابی ریسک لرزه ای در آسیای مرکزی. سیسمول. Res. Lett. 2015 ، 86 ، 210-222. [ Google Scholar ] [ CrossRef ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر