

خلاصه
برای حمل و نقل محموله های بزرگ، طرح های حمل و نقل سنتی فقط طول جاده، عرض جاده، هزینه حمل و نقل را به عنوان مقادیر وزن در تجزیه و تحلیل و محاسبه انتخاب مسیر در نظر می گیرند. با این حال، برای کامیون های بزرگ، چرخش جهت در تقاطع های جاده نیز فاکتوری است که باید در نظر گرفته شود. این تحقیق با وارد کردن الگوریتم کلاسیک Dijkstra در مدل شبکه راه، اندازه زاویه چرخش در تقاطع ها را به عنوان مقدار وزن لبه در شبکه کمکی بر اساس مقادیر وزنی گوشه های جاده در نظر می گیرد که بر اساس آن کوتاه ترین مسیر تحلیل می شود. انجام می شود. سپس در نهایت یک مسیر بهینه با حداقل هزینه زمانی بدست آمد. الگوریتم پیشنهادی با الگوریتم سنتی کوتاهترین مسیر تحلیل و مقایسه شد و گزارش شد که روش ما میتواند زمان عبور کامیونهای بزرگ را از تقاطعها کاهش دهد. علاوه بر این، الگوریتم پیشنهادی میتواند با شبکههای جادهای پیچیده و متنوع تطبیق داده شود و یک طرح قابل اعتماد برای انتخاب مسیر کامیونهای بزرگ ارائه کند.
کلید واژه ها:
حمل و نقل محموله بزرگ ; تحلیل مسیر بهینه تاخیر نوبت ; شبکه وزن فرمان
چکیده گرافیکی
1. معرفی
در سال های اخیر، صنعت حمل و نقل محموله های بزرگ به دلیل توسعه سریع و تلاش های ساخت و ساز فزاینده صنایعی مانند برق، انرژی، مواد شیمیایی و مصالح ساختمانی در چین توسعه یافته است [1 ] . در مقایسه با روش سنتی حمل و نقل، حمل و نقل محموله های بزرگ به مواردی اطلاق می شود که تجهیزات طولانی، بزرگ یا اضافه وزن را حمل می کنند [ 2 ]. به طور کلی، مسیر حمل و نقل محموله های بزرگ طولانی تر است و قیمت مواد و تجهیزات حمل و نقل نسبتاً گران است. بنابراین، طراحی یک طرح حمل و نقل معقول می تواند تا حد زیادی کارایی آن را بهبود بخشد [ 3]. از یک سو، حملونقل بزرگراهی بهعنوان روش اصلی حملونقل محمولههای بزرگ، انعطافپذیر است به طوری که میتوان با اجتناب از حملونقل ثانویه، دستگاهها را مستقیماً به مقصد خود حمل کرد و از این رو در هزینههای حمل و نقل صرفهجویی میکند [4 ] . از سوی دیگر، حتی اگر از راههای آبی یا راهآهن برای حمل و نقل اشیاء مهم استفاده شود، سفر از یا به اسکله یا ایستگاه قطار در نهایت توسط حملونقل بزرگراهی پوشش داده میشود [4] .]. بنابراین، طراحی مسیری بهینه برای طرحهای حملونقل کالای بزرگ در بزرگراهها نه تنها نیاز مبرم بسیاری از واحدهای باربری است، بلکه میتواند تضمین مهمی برای امنیت و اطمینان تجهیزات حملونقل در پروژههای بزرگ باشد. بهینه سازی انتخاب مسیر طرح حمل و نقل محموله بزرگ در بزرگراه ها در حال حاضر به موضوعی با اهمیت عملی تبدیل شده است [ 2 ].
اجرای طرح مسیرهای سفر در یک شبکه جاده ای همیشه از طریق تحلیل کوتاه ترین مسیر قابل دستیابی است. یک مقدار وزن مرتبط، مانند زمان صرف شده توسط وسایل نقلیه برای عبور از یک بخش جاده [ 5]، روی لبه هر مسیری که مربوط به یک جاده است تنظیم می شود و با استفاده از الگوریتم سنتی Dijkstra می توان کوتاه ترین مسیر را با مقادیر وزن مربوطه بدست آورد. با این حال، در مورد انتخاب مسیر طرح حمل بار بزرگ، به دلیل ویژگی های بسیار بلند، طویل و سنگین آن، کامیون های بزرگ در حین حرکت در جاده هایی با موانعی مانند ظرفیت باربری زمین، خمیدگی، با محدودیت هایی مواجه خواهند شد. شعاع مورد نیاز جاده، حداکثر روسازی طولی، عرض منحنی در جاده، و الزامات شیب متقاطع [ 1]. تنها در نظر گرفتن تأثیر طول جاده بر کل زمان اجرا کافی نیست. در واقع، تفاوت های بسیار زیادی در میزان زمان صرف شده برای فرمان و محدودیت ها با کامیون های حمل و نقل مختلف در تقاطع های جاده های مختلف در سیستم ترافیکی در مناطق شهری وجود دارد [6 ] . برای کامیون های بزرگ در بزرگراه ها معمولاً از تریلرهای مسطح بزرگ یا تریلرهایی که بدنه بلندتری دارند استفاده می شود. برخی حتی از تریلرهای پل برای اتصال گروهی از تریلرهای تخت استفاده می کنند [ 7 ]. فرمان برای کامیون های بزرگ در تقاطع های داخل شبکه جاده ها در مناطق شهری بسیار ناخوشایند می شود، که به ویژه برای کامیون های مفصلی صادق است. بنابراین، کامیونهای بزرگ در مقایسه با خودروهای معمولی باید زمان بیشتری را در تقاطعها بگذرانند. کالدول [8 ] پیشنهاد کرد که تاخیر ناشی از محدودیتهای فرمان در تقاطعهای جادهای توسط کامیونهای حملونقل میتواند به 17 تا 35 درصد کل زمان سفر برسد. اگر محدودیتهای فرمان در طول برنامهریزی مسیر و انتخاب مسیر نادیده گرفته شود، ویژگیهای اساسی شبکه راه از بین میرود. بنابراین، مسیر بهینه به دست آمده عملی نیست یا قوانین راهنمایی و رانندگی را در نظر نمی گیرد. نیلسن [ 9] پیشنهاد کرد که تقاطع جاده بخش مهمی از یک شبکه جاده ای است و تاخیر در تقاطع های جاده ای ناشی از فرمان، نشان دهنده تداوم گره در شبکه حمل و نقل است که بر کل زمان سفر تأثیر می گذارد. بنابراین در طراحی مسیر حمل و نقل بزرگراهی برای محموله های بزرگ، هزینه فرمان در تقاطع های جاده ای شهر عاملی است که نمی توان از آن چشم پوشی کرد. به ویژه، برای کامیون های بزرگ، باید بر اثر تاخیر ناشی از محدودیت های فرمان در تقاطع های جاده تاکید شود. گوتیرز و مداگلیا [ 10 ] سعی کردند با بهبود الگوریتم Dijkstra کوتاهترین مسیر را با محدودیت فرمان پیدا کنند. اشمید و زیلر [ 11] پیشنهاد کرد که هر گره در شبکه جادهای را به چهار زیرگره تقسیم کند و مسیری که هر جاده در آن قرار دارد با سه قوس جایگزین شد که اتصال را نشان میدهد تا هزینه هدایت کامیونها را در تقاطعهای جاده نشان دهد. با این حال، افزایش تعداد گره ها و پیوندها منجر به کاهش زیادی در راندمان محاسبه مسیر بهینه می شود. علاوه بر این، د لا بارا [ 12 ] ساختار داده ای به نام نمودار دوگانه را برای توصیف مدل شبکه حمل و نقل با محدودیت های فرمان پیشنهاد کرد. نمودار دوگانه از قوس هایی استفاده می کند که رابطه چرخش را برای نشان دادن رابطه چرخش (یا محدودیت ها) در گره های درون مدل شبکه جاده ها بیان می کند، که نه تنها می تواند رابطه ارتباطی و محدودیت های فرمان را به طور کامل بیان کند، بلکه افزونگی داده ها را نیز تا حد زیادی کاهش می دهد [13] .].
طرح سنتی برای طرح حمل و نقل محموله های بزرگ، به سادگی برخی از عوامل اساسی هزینه حمل و نقل و امکان رانندگی، مانند طول و عرض جاده و شرایط جاده را در نظر می گیرد، بدون اینکه در نظر گرفتن زمان مورد نیاز برای حمل و نقل بزرگ مورد توجه قرار گیرد. کامیونها هنگامی که در تقاطعهای شبکه راه میپیچند. در مورد طرح حمل و نقل بزرگراهی برای محموله های بزرگ، بسیاری از برنامه ریزان شب را برای حمل و نقل انتخاب می کنند تا از اوج ترافیک جلوگیری کنند. بنابراین، حجم ترافیک جاده تاثیر نسبتا کمی بر این طرح دارد. علاوه بر این، بسیاری از چراغ های راهنمایی در تقاطع ها در مناطق شهری پس از نیمه شب به طور خودکار به رنگ زرد تنظیم می شوند. بنابراین می توان اثر تاخیر انتظار چراغ راهنمایی در چهارراه را نیز نادیده گرفت. بر اساس مدل شبکه جادهای و الگوریتم سنتی Dijkstra، این مطالعه به طور جامع هم زمان اجرا برای عبور از جاده و هم هزینه سفر چرخش در تقاطعهای جادهای را در نظر میگیرد و یک مدل داده شبکه را بر اساس مقادیر وزن ایجاد میکند. از گوشه های جاده سپس الگوریتمی از تحلیل کوتاهترین مسیر بر اساس اندازه زاویه چرخش برای بهینهسازی الگوریتم کوتاهترین مسیر موجود پیشنهاد شد. با تجزیه و تحلیل و مقایسه با الگوریتم سنتی کوتاه ترین مسیر، که طول واقعی جاده را به عنوان مقدار وزن دویدن در نظر می گیرد، ما به این نتیجه رسیدیم که مدل چرخشی مبتنی بر گوشههای جاده در تقاطعها، طراحی بهتری از مسیرهای عملیاتی برای کامیونهای بزرگ دارد و میتواند یک مبنای نظری قابل اعتماد و پشتیبانی فنی برای طرح حملونقل بزرگراهی برای محمولههای بزرگ فراهم کند. الگوریتم تحلیل کوتاهترین مسیر بر اساس مدل مقادیر وزنی گوشههای جاده ارائهشده در این مقاله کاربرد آینده امیدوارکنندهای دارد و بهطور مؤثری به طراحی و برنامهریزی مسیرهای عملیاتی برای حمل و نقل محمولههای بزرگ در صنایعی مانند برق، انرژی، مواد شیمیایی و مصالح ساختمانی چنین الگوریتمی هزینه و قیمت حمل و نقل در بزرگراه ها را تا حد زیادی کاهش می دهد و یک پایه نظری قوی و تحلیل امکان سنجی در طراحی مسیر برای طرح های حمل و نقل محموله بزرگ ارائه می دهد. الگوریتم تحلیل کوتاهترین مسیر بر اساس مدل مقادیر وزنی گوشههای جاده ارائهشده در این مقاله کاربرد آینده امیدوارکنندهای دارد و بهطور مؤثری به طراحی و برنامهریزی مسیرهای عملیاتی برای حمل و نقل محمولههای بزرگ در صنایعی مانند برق، انرژی، مواد شیمیایی و مصالح ساختمانی چنین الگوریتمی هزینه و قیمت حمل و نقل در بزرگراه ها را تا حد زیادی کاهش می دهد و یک پایه نظری قوی و تحلیل امکان سنجی در طراحی مسیر برای طرح های حمل و نقل محموله بزرگ ارائه می دهد. الگوریتم تحلیل کوتاهترین مسیر بر اساس مدل مقادیر وزنی گوشههای جاده ارائهشده در این مقاله کاربرد آینده امیدوارکنندهای دارد و بهطور مؤثری به طراحی و برنامهریزی مسیرهای عملیاتی برای حمل و نقل محمولههای بزرگ در صنایعی مانند برق، انرژی، مواد شیمیایی و مصالح ساختمانی چنین الگوریتمی هزینه و قیمت حمل و نقل در بزرگراه ها را تا حد زیادی کاهش می دهد و یک پایه نظری قوی و تحلیل امکان سنجی در طراحی مسیر برای طرح های حمل و نقل محموله بزرگ ارائه می دهد.
بقیه این مقاله به شرح زیر سازماندهی شده است: بخش 2 مدل شبکه را بر اساس مقادیر وزنی فرمان معرفی می کند. بخش 3 روند الگوریتم را با مثال هایی شرح می دهد. بخش 4 آزمایش های مقایسه ای و تجزیه و تحلیل نتایج را ارائه می دهد. در نهایت، بخش 5 شامل نتیجه گیری و کاربرد آینده نگر الگوریتم پیشنهادی است.
2. مدل شبکه بر اساس مقادیر وزنی فرمان
2.1. نمودار دوگانه
یک شبکه جغرافیایی، موجودیت یک هدف جغرافیایی را در فضای جغرافیایی از طریق مفهوم شبکه در نظریه گراف توصیف و بیان می کند [ 14] .]. یک شبکه جغرافیایی یک ساختار مشبک است که از چندین موجودیت خطی به هم پیوسته تشکیل شده و شامل دادههای مکانی و ویژگیها میشود. از داده های مکانی برای علامت گذاری مکان اشیاء روی زمین و همبستگی آنها استفاده می شود. ویژگی برای نشان دادن اطلاعات مربوط به ویژگی ها (مانند نام یا طول جاده) استفاده می شود. اگر مفهوم شبکه جغرافیایی در ساخت مدل شبکه راه های شهری وارد شود، شبکه حمل و نقل ایجاد می شود. معمولاً افراد از مدل گراف جهت دار با مقادیر وزنی برای نمایش ساختار کلی شبکه جاده استفاده می کنند، یعنی G = (V, E)، که در آن G مدل داده شبکه حمل و نقل را نشان می دهد، V مجموعه راس شبکه حمل و نقل است. ، همچنین به عنوان گره شناخته می شود،
یافتن مسیر بهینه به معنای یافتن مسیری با کمترین شدت انسداد بین دو گره مشخص شده در شبکه است. تولید مسیر بهینه بر اساس مقادیر وزن تعیین شده در هر بخش جاده در شبکه است. مقادیر وزن هزینه هایی است که با عبور از یک لبه یا نقطه پایانی در شبکه پرداخت می شود که به عنوان قدرت انسداد نیز شناخته می شود. آنها منعکس کننده موانع یا محدودیت ها (فاصله یا تاخیر زمانی، از جمله دیگر) جاده در هنگام عبور وسایل نقلیه [ 15]. مسیر بهینه نه تنها به مسیری با کمترین مسافت، بلکه به مسیری اطلاق میشود که از ابزارهای اندازهگیری دیگری مانند زمان انتظار، هزینه سفر و سرعت سفر بر اساس تفاوتهای قابل توجه در شرایط ترافیکی بین جادههای مختلف استفاده میکند. و به تعاریف مختلف قدرت انسدادی [ 6 ، 16 ]. بر این اساس، حل مشکل یافتن کوتاه ترین مسیر معادل یافتن سریع ترین مسیر یا مسیر با کمترین هزینه و غیره است [ 17 ].
در گذشته، زمان صرف شده توسط کامیون ها برای سفر در یک بخش جاده خاص یا طول جاده به عنوان مقدار وزن تعیین می شود. با این حال، این مدل قدیمی همیشه در شرایط واقعی موثر نیست [ 18 ]. چرخش جاده به یک ویژگی مهم در شبکه حمل و نقل در هنگام انجام برنامه ریزی مسیر یا انتخاب طرح حمل و نقل بار بزرگ تبدیل شده است. بنابراین لازم است در فرآیند استقرار مدل شبکه راه های شهری، تاخیر فرمان در تقاطع های جاده ای در نظر گرفته شود و ارزش اموال مناسب به عنوان مقادیر وزنی برای عبور کامیون های حمل و نقل انتخاب شود.
با توجه به اینکه ارزش وزنی فرمان یک رابطه دودویی بین هر دو جاده پیوسته را توصیف می کند، نمی توان آن را مستقیماً در ساختار اصلی شبکه جاده ذخیره کرد [ 19 ]. متفاوت از روش تقسیم یک گره [ 12]، نمودار دوگانه از یک قوس کمکی برای توصیف رابطه فرمان و محدودیتهای بین جادههای مجاور استفاده میکند. در مدل نمودار دوگانه، لبه اصلی که جاده در آن قرار دارد، تبدیل به گرهای میشود که حاوی اطلاعات ویژگیهای لبه اصلی جاده است و جهت چرخش در نقشه راه اصلی با یک یال در نمودار دوگانه نشان داده میشود. بنابراین، مدل گراف جهت دار سنتی به G = (V’, E’, R) تبدیل می شود، که در آن V’ مجموعه گره ها در نمودار دوگانه است که نشان دهنده راه های واقعی در شبکه اصلی جاده است. E’ مجموعه ای از یال ها در نمودار دوگانه است که نشان دهنده اتصال جاده های مجاور در شبکه اصلی جاده است. R نشاندهنده رابطه فرمان یا محدودیتهای فرمان بین دو جاده مجاور در مدل شبکه جادهای اولیه است، همانطور که در نشان داده شده است.شکل 1 .
در نمودار دوگانه، گره (مانند گره های D، E) نشان دهنده راه اصلی است. گره شروع نشان دهنده جاده ای است که کامیون ها قبل از پیچیدن در آن حرکت می کنند، در حالی که گره پایانی نشان دهنده جاده ای است که کامیون ها پس از انجام یک پیچ در آن حرکت می کنند. اطلاعات ویژگی جاده اصلی (مانند قوس AB و BC) در ویژگی گره کمکی گنجانده شده است. در همین حال، مقادیر ویژگی های جدید، مانند وزنه های فرمان و محدودیت های فرمان، در قوس (مانند قوس DE) نمودار دوگانه گنجانده شده است. علاوه بر این، روند لبه در شبکه بر اساس مقادیر وزن گوشه ها، جهت پیچ را نشان می دهد. به عنوان مثال، در شکل 1، قوس DE نشان می دهد که کامیون ها در گره B از جاده AB به سمت جاده BC به چپ می پیچند، در حالی که قوس ED نشان می دهد که کامیون ها در گره B از جاده CB به جاده BA به راست می پیچند. پس از به دست آوردن مسیر بهینه از شبکه کمکی بر اساس مقادیر وزنی گوشه ها با استفاده از الگوریتم تحلیل کوتاه ترین مسیر، به راحتی می توان مسیر بهینه را در شبکه اصلی راه با اطلاعات لبه کمکی و جهت استخراج کرد. پیچ در جاده
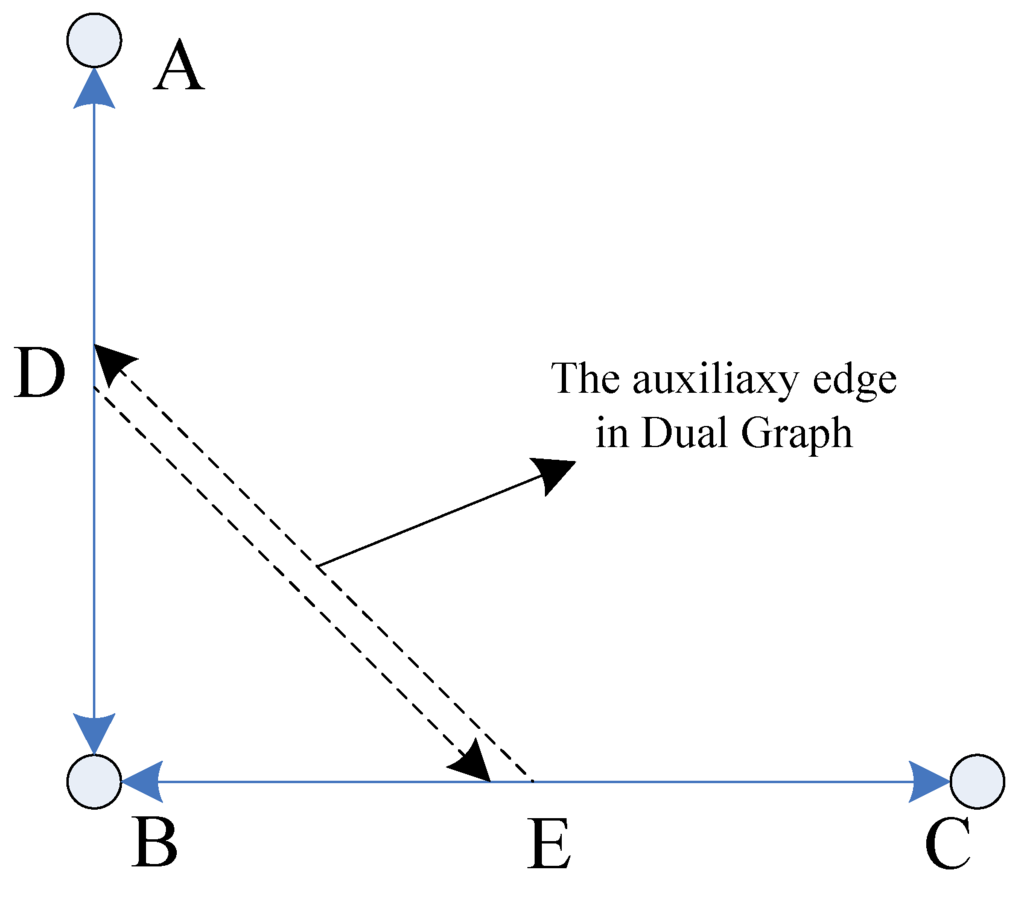
شکل 1. مدل نمودار دوگانه.
2.2. ایجاد مدل شبکه
جاده های شهر پیچیده و متنوع هستند. جادههای مرتفع، تونلها، تبادل دوار و غیره وجود دارد . در فرآیند مدلسازی شبکه جادهای در شهر، شبکه راههای پیچیده در مناطق شهری را به سه بخش، یعنی گرهها، بخشها و گوشهها ساده میکنیم [ 20 ، 21 ] . علاوه بر این، ما وضعیت بخشهای پیچیده پلها و تونلها یا راهراهها را در نظر نمیگیریم. در عین حال، به دلیل وجود تفاوت بین جاده های یک طرفه و دو طرفه در شهر [ 6]]، اگر هیچ فرآیند لازم انجام نشود، یک جاده یک طرفه نیز ممکن است در تجزیه و تحلیل مسیر در جهت ممنوع درگیر شود، که منجر به ناسازگاری بین یافته های تجزیه و تحلیل مسیر و وضعیت واقعی می شود. بنابراین، مقادیر وزن مثبت و منفی فرمان در جدول ویژگی فرمان تنظیم شده است. بنابراین، اگر فرمان در تقاطع جاده دو طرفه باشد، مقادیر وزن فرمان مثبت و منفی به ترتیب تنظیم می شوند. اگر فرمان یک چرخش یک طرفه باشد، وزن واقعی فرمان بر روی جهتی که می توان بر اساس آن پیچید، تنظیم می شود، در حالی که جهت معکوس روی بی نهایت تنظیم می شود، به این معنی که فرمان غیر قابل عبور است. هنگامی که مقادیر مختلف وزن برای پیچ های مختلف تنظیم شد، یک شبکه کمکی وزن دار با جهت تشکیل می شود [ 22 ].
همانطور که در شکل 2 نشان داده شده است ، edge de در شبکه کمکی بر اساس گوشه های جاده نه تنها مقدار وزن پیچ از جاده ab به جاده bc ، بلکه ارزش وزن پیچ از جاده bc به جاده ab را نیز ذخیره می کند . هر دو مقادیر عملکردی مربوط به مقدار زاویه چرخش هستند. در همین حال، قوس کمکی در شبکه کمکی مبتنی بر گوشه های جاده نیز مسافت واقعی طی شده توسط کامیون ها را هنگام انجام پیچ ذخیره می کند. به عنوان مثال، هنگام عبور از تقاطع b ، خط قرمز قرمز مسافت واقعی را نشان می دهد که کامیون ها هنگام چرخش طی کرده اند.
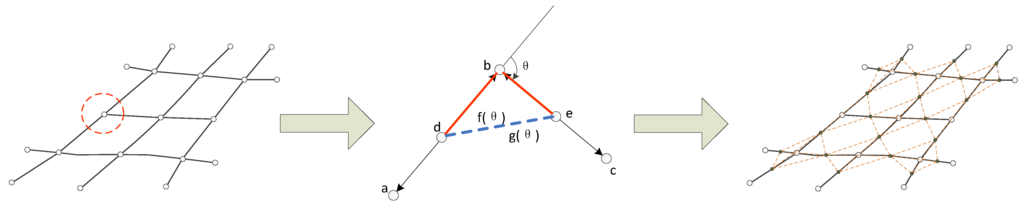
شکل 2. ساخت شبکه کمکی بر اساس گوشه های جاده.
کوتاه ترین مسیر با حداقل وزن فرمان بین نقطه شروع و پایان که مسیری با کمترین تاخیر در تقاطع های جاده ای نیز می باشد را می توان با استفاده از مدل مقادیر وزنی پیچ های جاده محاسبه کرد. با این حال، مسیرهایی با کمترین تأخیر هنگام چرخش، همیشه طولانی تر از مسیرهایی هستند که کمترین طول فیزیکی را دارند. در واقع، مسیرهایی با کمترین تأخیر پیچ تنها زمانی با کوتاه ترین مسیرها مطابقت دارند که شبکه جاده ها در یک شبکه معمولی مشبک شوند [ 23 ]، اما در زندگی واقعی، چنین جاده هایی تقریباً وجود ندارند. این تحقیق به طور جامع تاخیر فرمان و طول مسیر را به عنوان مبنایی در انتخاب مسیر برای طرح حمل و نقل بار بزرگ در نظر گرفته است. میز 1ساختار ذخیره سازی شبکه کمکی را بر اساس گوشه ها نشان می دهد.

جدول 1. ساختار ذخیره سازی شبکه کمکی بر اساس گوشه ها.
2.3. تنظیم مقادیر وزن
2.3.1. محاسبه ارزش گوشه
در برنامه ریزی طرح حمل و نقل محموله بزرگ، جهت چرخش به دلیل ویژگی های خود کامیون های حمل و نقل به یک عامل غیر قابل چشم پوشی در فرآیند انتخاب مسیر تبدیل می شود. جهت چرخش نه تنها انتقال از یک بخش قوس الکتریکی به بخش دیگر در شبکه جاده است که اتصال بین بخش ها را مشخص می کند، بلکه کارایی حمل و نقل کامیون های بزرگ را در کل فرآیند سفر محدود می کند. در موقعیت های ترافیکی واقعی، مقدار امپدانس (مقدار وزن) تولید شده توسط زاویه فرمان در اندازه های مختلف متفاوت است. این مقاله مدلی از هزینه فرمان را با دادن مقادیر مختلف مقاومت به زوایای مختلف فرمان ارائه می کند.
شکل 3 تعریف مدل جاده ها، قوانین فرمان و زوایای فرمان را نشان می دهد. در شکل، A, O 0 و O 1 گره های جاده هستند و A–O 0 و O 0 –O 1 بخش های جاده هستند. در تقاطع های جاده، قانون فرمان از طریق “گره شروع-گره تقاطع-گره پایانه” توصیف می شود، که پیچ را به چهار نوع تقسیم می کند، یعنی گردش به چپ، مستقیم رفتن، چرخش به راست و برگشت [20 ] . زاویه فرمان به عنوان یک پخ تشکیل شده از لبه جاده که در آن نقطه شروع قرار دارد تا لبه ای که نقطه پایانی در یک چرخش خلاف جهت عقربه های ساعت با تقاطع جاده به عنوان مرکز چرخش قرار دارد، تشکیل می شود. همانطور که در شکل 3 نشان داده شده است, O 2 –O 0 –A جهت چپ دارد و مقدار زاویه φ است. A–O 0 –O 1 جهت رو به جلو دارد و مقدار زاویه 0 درجه است. O 2 –O 0 –O 1 جهت راست دارد و مقدار زاویه ε است. O 2 –O 0 –O 2 جهت چرخش را نشان می دهد و مقدار زاویه 180 درجه است.
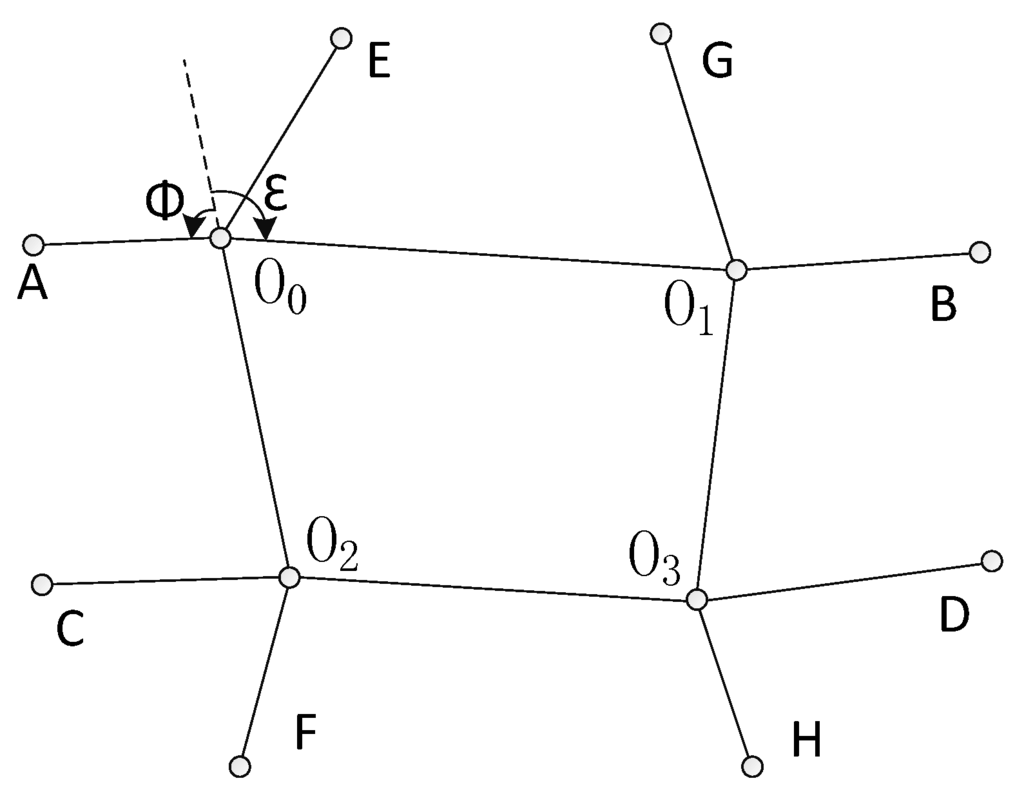
شکل 3. مدل چرخش در تقاطع های جاده.
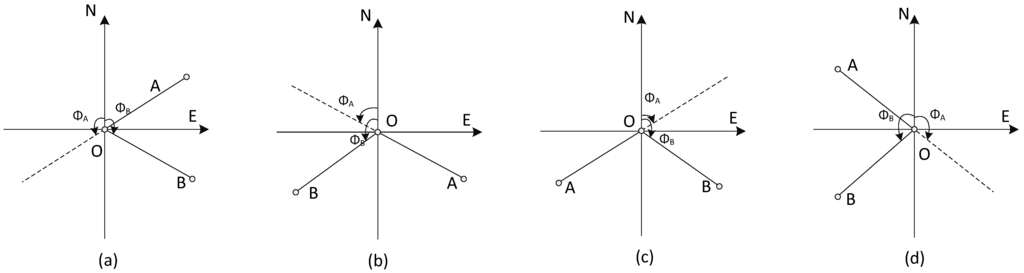
شکل 4. محاسبه مقدار زوایای چرخش: ( الف ) مورد a، ( ب ) مورد b ( ج ) مورد c و ( d ) مورد d.
بر اساس بحث بالا، مقدار واقعی زاویه چرخش کامیونها به صورت Φ A −Φ B به دست میآید ، جایی که Φ A نشاندهنده زاویه تحت پوشش جهت شمال به سمت جهتی است که کامیون قبل از انجام پیچ در آن حرکت میکند و Φ B. نشان دهنده زاویه ای است که جهت شمال نسبت به جهتی که کامیون پس از چرخش در آن حرکت می کند، پوشش می دهد. بنابراین، موارد زیر مشتق شده است ( شکل 4 ):
(الف) وسیله نقلیه به سمت چپ میپیچد و مقدار زاویه دور در هنگام زاویه Φ A ∈ (-180 درجه، 90- درجه] و زاویه Φ B ∈ [90 درجه، 180 درجه) Φ A − Φ B + 360 درجه است . ).
(ب) وسیله نقلیه به سمت چپ میپیچد و مقدار زاویه دور در هنگام زاویه Φ A ∈ (90- درجه، 0 درجه) و زاویه Φ B ∈ (-180 درجه، 90-) Φ A − Φ B (° ) است . °].
ج) وسیله نقلیه به سمت چپ میپیچد و مقدار زاویه چرخش | Φ A − Φ B | (°)، وقتی زاویه Φ A ∈ (0°، 90°) و زاویه Φ B ∈ [90°، 180°) باشد.
(د) وسیله نقلیه به سمت چپ میپیچد و مقدار زاویه دور در هنگام زاویه Φ A ∈ [90 درجه، 180 درجه) و زاویه Φ B ∈ (-180 درجه، 90- درجه) Φ B − Φ A + 360 درجه است . ].
علاوه بر این، هنگامی که کامیون ها مستقیماً در تقاطع های جاده حرکت می کنند، مقدار زاویه 0 درجه در نظر گرفته می شود. و هنگامی که وسیله نقلیه می چرخد، مقدار زاویه 180 درجه است. با توجه به موقعیت های مختلف فرمان که در بالا ذکر شد، موارد زیر به دست می آید:
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪ϕ A – ϕ B < – 180 درجه– 180 درجه < ϕ A – ϕ B < 0 درجه0 درجه0 ° < ϕ A – ϕ B < 180 درجهϕ A – ϕ B = ± 180 درجه180 درجه < ϕ A – ϕ Bتو نیستی _ _ _ _ _ r i gh t ، t h e c o r n e r s i z e i s ϕ A – ϕ B + 360 درجه تو نیستی _ _ _ _ _ l e ft , t h e c o r n e r s i z e i s | ϕ A − ϕ B | go i n g s t r a i gh tتو نیستی _ _ _ _ _ r i gh t ، t h e c o r n e r s i z e i s ϕ A − ϕ B تو نیستی _ _ _ _ _ a r o u n d, t h e c o r n e r s i z e i 180 درجه است تو نیستی _ _ _ _ _ l e ft , t h e c o r n e r s i z e i s ϕ B – ϕ A + 360 درجه {�آ–�ب<–180درجه–180درجه<�آ–�ب<0درجهتیتو��من�� �من�ساعتتی،تیساعته ج���ه� سمن�ه منس �آ–�ب+360درجهتیتو��من�� له�تی،تیساعته ج���ه� سمن�ه منس|�آ–�ب|0درجه0درجه<�آ–�ب<180درجه��من�� ستی�آمن�ساعتتیتیتو��من�� �من�ساعتتی،تیساعته ج���ه� سمن�ه منس �آ–�ب�آ–�ب=±180درجهتیتو��من�� آ��تو�د،تیساعته ج���ه� سمن�ه منس 180درجه180درجه<�آ–�بتیتو��من�� له�تی،تیساعته ج���ه� سمن�ه منس �ب–�آ+360درجه
2.3.2. مدل زمانبر برای فرمان
استحکام انسدادی مسیر بهینه بر اساس اندازه گوشه ها در تقاطع های جاده شامل انسداد بخش ها و مقاومت های اتصال است [ 24 ]. مقدار امپدانس بخشهای جاده، یعنی زمان سفر در طول یک جاده، عامل اصلی انتخاب مسیر پس از تصمیمگیری مقصد سفر است که توسط بسیاری از الگوریتمهای تحلیل کوتاهترین مسیر نیز در نظر گرفته میشود. برای مقاومت در اتصال جاده، این تحقیق از دادههای ردیابی GPS در تقاطعهای جادهای در یک شهر استفاده کرد تا رابطه بین اندازه زاویه چرخش در تقاطعهای جادهای و تأخیر در چرخش کامیونهای بزرگ را برای تجزیه و تحلیل قوانین داخلی آن، پس از آن، تنظیم کند. حذف تعدادی از خطاها در داده ها به دلیل عوامل عینی.

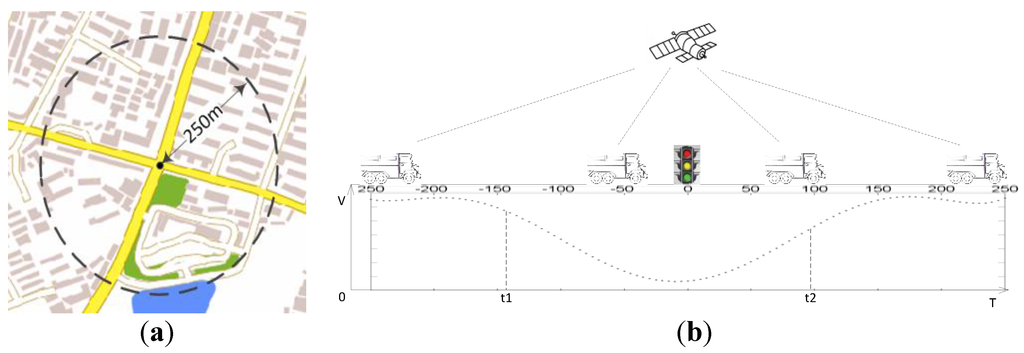
شکل 5. محاسبه زمان مصرف شده با چرخش: ( الف ) منطقه آزمایش و ( ب ) تعریف زمان مصرف شده توسط کامیون های بزرگ برای چرخش.
آزمایش زیر از داده های ردیابی شده انتخاب شده از یک منطقه چهارراه (که در آن عرض سکوی جاده در دسترس 24 متر و تعداد خطوط ترافیکی 4 است) با شعاع 250 متر برای نمونه های آزمایشی استفاده کرد، همانطور که در شکل 5 الف نشان داده شده است . تابع اتصال چند جمله ای برای درون یابی برای به دست آوردن سرعت کامیون های حمل و نقل (که دارای 4 متر ارتفاع، 6 متر عرض و 70 متر طول با یک تریلر تخت می باشند) در هر زمان استفاده می شود. سپس، زمان t1 و t2 را می توان محاسبه کرد که مربوط به نقاط عطف سرعت در اطراف تقاطع های جاده توسط کامیون های بزرگ است. این مقاله فرض می کند که زمان عبور کامیون های بزرگ از یک تقاطع خاص T = t2-t1 است ( شکل 5)ب). تجزیه و تحلیل آماری چندگانه بر روی زمان مصرف شده با چرخش با استفاده از داده های ردیابی ثبت شده در تقاطع های یک شهر انجام شد. نمودار پراکندگی به دست آمده با استفاده از MATLAB در شکل 6 نشان داده شده است .

شکل 6. نتیجه تطبیق تاخیر در چرخش در تقاطعهای جاده: ( الف ) تاخیر کامیونهای بزرگ هنگام چرخش به چپ در تقاطعها. و ( ب ) تأخیر کامیونهای بزرگ هنگام چرخش به راست در تقاطعها.
در شرایط عادی، کامیونهای حمل و نقل اغلب شبها را انتخاب میکنند که چراغهای راهنمایی در تقاطعهای جادهها در بسیاری از شهرها زرد شده است. بنابراین، تأخیر تحت تأثیر چراغ راهنمایی نسبتاً ناچیز است. در نتیجه، همراه با ویژگیهای کامیونهای بزرگ، زمان حرکت مستقیم در تقاطعها کوتاهترین زمان است، به این معنی که هزینه آن نیز کوچکترین است. اگرچه به اندازه مسیر مستقیم راحت نیست، اما هزینه گردش به راست در تقاطعهای جادهای هنوز نسبتاً کم است، بر اساس مقرراتی که وسایل نقلیه در جاده به طور یکنواخت در سمت راست در چین حرکت میکنند. با این حال، با افزایش اندازه زاویه، زمان مورد نیاز به طور قابل توجهی افزایش می یابد. برای گردش به چپ در تقاطع ها،25 ]. بنابراین، هنگامی که کامیون ها به چپ می روند، هزینه نسبتاً بالاتر خواهد بود.
همانطور که در شکل 6 نشان داده شده است، تأخیر پیچ در هنگام چرخش به چپ در تقاطع های جاده توسط کامیون های حمل و نقل یک رابطه خطی با زوایای افزایش فرمان را نشان می دهد. از نظر چرخش به راست، زمانی که زاویه فرمان کم باشد، زمان چرخش نسبتاً کوتاه است و افزایش تاخیر پیچ نیز کم است. با این حال، با افزایش زاویه فرمان، به ویژه زمانی که اندازه گوشه به بیش از 80-90 درجه می رسد، افزایش تاخیر پیچ به طور قابل توجهی افزایش می یابد، روند کلی یک رشد سهموی را نشان می دهد. همانطور که در شکل 6 نیز نشان داده شده است، با همان اندازه گوشه، هزینه گردش به چپ توسط کامیون های بزرگ به طور مداوم بیشتر از چرخش به راست است. با افزایش زاویه فرمان، اختلاف زمان در تأخیر فرمان کمتر می شود، اما زمان تأخیر برای گردش به چپ همچنان بیشتر از زمان گردش به راست است. بنابراین، اندازه زاویه چرخش برای کامیون های بزرگ اهمیت زیادی دارد.
با استفاده از دادههای تجربی و منحنی نصب شده، این مقاله یک مدل مصرفی فرمان بر اساس زوایای پیچ در تقاطعهای جادهای، همانطور که در جدول 2 نشان داده شده است، پیشنهاد میکند تا زمان مصرف کامیونهای بزرگ را در هنگام پیچیدن در تقاطعهای جادهای که در آن شرکت میکنند، جا بزنند و تخمین بزنند. در تجزیه و تحلیل و محاسبه انتخاب مسیریابی. بنابراین، یک مبنای تجربی قابل اعتماد برای برنامه ریزی مسیر حمل و نقل محموله های بزرگ فراهم می کند.
جدول 2. مدل زمانبر با فرمان بر اساس پیچ ها در تقاطع جاده ها.
3. نمونه ها و تایید الگوریتم
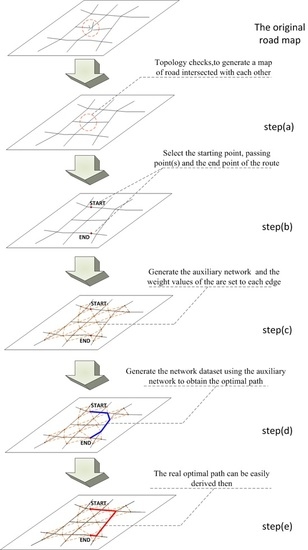
بر اساس مدل هزینه فوق الذکر، الگوریتمی برای محاسبه کوتاه ترین مسیر طراحی می کنیم که در شکل 7 نشان داده شده است .
(الف) برای دادههای لایه موجود جادههای شهری، ابتدا فرآیند ویرایش انجام میشود (پیش پردازش)، که جاده را در مدل با جادههای واقعی مطابقت میدهد. بررسی توپولوژی برای ایجاد نقشه ای از جاده هایی که بخش های آنها با یکدیگر قطع شده اند ضروری است [ 26]]. محتویات پیش پردازش شامل بررسی صحت، کامل بودن و سازگاری جاده ها است. بررسی دقت عمدتاً به پیام خطایی اشاره دارد که در نقطه پایانی جاده وجود دارد که باید حذف شود. بررسیهای یکپارچگی شامل جادههایی میشود که باید در یک تقاطع جادهای را قطع کنند و در یک نقطه تقاطع نداشته باشند، که باید با جابجایی دستی قطع شوند. بررسیهای سازگاری برای وجود خطوط متعدد با هم تداخل دارند که در این صورت بخشهای ناخواسته باید حذف شوند. در نهایت، تمام جادهها باید در تقاطعهای جادهای قطع شوند تا ساخت مدل شبکه جادهای که از بخشهای متصل تشکیل شده است، تسهیل شود، همانطور که در شکل 8 الف نشان داده شده است.

شکل 7. جریان اصلی الگوریتم
(ب) از طریق تعامل انسانی، نقطه شروع، نقطه عبور (ها) و نقطه پایان مسیر در شبکه جاده اختصاص داده می شود.
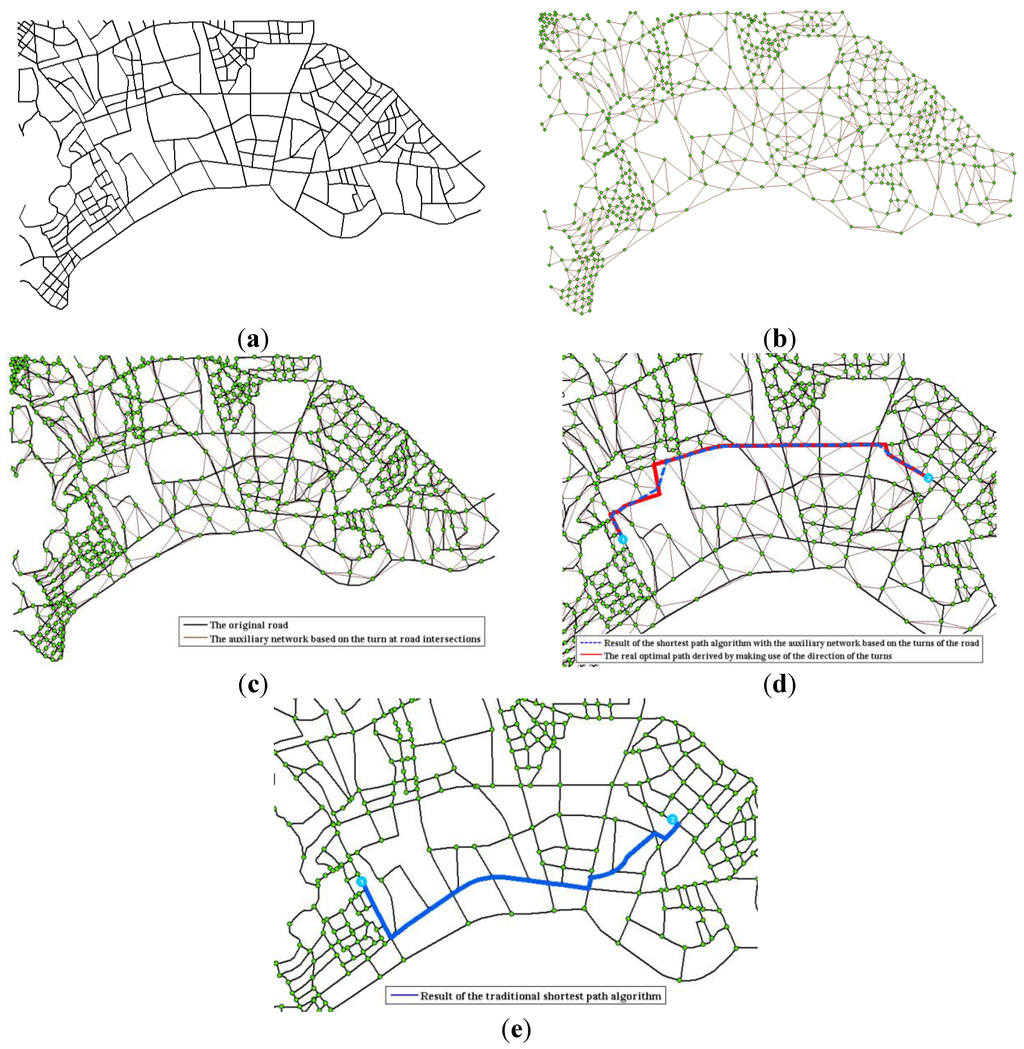
شکل 8. مقایسه نتایج الگوریتم سنتی و الگوریتم مبتنی بر مدل وزنی گوشه ها: ( الف ) نقشه راه یک شهر در چینگدائو. ( ب ) شبکه بر اساس مقادیر وزنی گوشه ها در تقاطع های جاده. ( ج ) رندرهای روی هم قرار داده شده؛ ( د ) نتیجه تحلیل کوتاهترین مسیر با مدل وزنی گوشهها. و ( ه ) نتیجه الگوریتم سنتی موجود.
(ج) دادههای لایه موجود جادهها، نقطه شروع، نقطه پایان و نقطه عبور مسیری که انتخاب میشود برای تولید شبکه کمکی بر اساس گوشهها و مقادیر وزنی گوشهها تنظیم شده است. به هر لبه کمکی شبکه. برای همه جادهها، به جز جادهای که نقطه شروع، نقطه پایان یا نقطه عبور قرار دارد، نقطه میانی به عنوان گره ثانویه در شبکه کمکی جاده در نظر گرفته میشود. برای جاده هایی که نقطه شروع، نقطه پایان یا نقطه عبور قرار دارد، گره اختصاص داده شده، به جای نقطه میانی، به عنوان گره ثانویه در نظر گرفته می شود تا ساخت شبکه کمکی بر اساس مقادیر وزن گوشه تسهیل شود. .شکل 8 ب. شکل 8 ج، رندرهای اثر انباشتگی شبکه کمکی را بر اساس مقادیر وزن گوشه و نقشه راه اصلی نشان می دهد.
(د) در نهایت، مجموعه داده شبکه با استفاده از شبکه کمکی بر اساس مقادیر وزن گوشه تولید میشود و هم ارزش هزینه فرمان و هم طول واقعی جاده به عنوان هزینههای عبوری تعیین میشوند. تحلیل کوتاهترین مسیر بر روی مجموعه داده شبکه تولید شده انجام میشود و سپس مسیر بهینه به دست میآید، همانطور که توسط مسیرهای نقطهدار آبی در شکل 8 d نشان داده شده است.
(ه) بسته به جهت زاویه پیچ و مسیر بهینه تولید شده، مسیر بهینه واقعی را می توان به راحتی از شبکه جاده واقعی بدست آورد، همانطور که توسط مسیر جامد قرمز رنگ در شکل 8 d نشان داده شده است . این نتیجه با نتیجه ای که از الگوریتم تحلیل کوتاه ترین مسیر بر اساس طول جاده به عنوان هزینه سفر استفاده می کند، مقایسه شده است، همانطور که توسط مسیر آبی در شکل 8 e نشان داده شده است.
همانطور که در شکل 8 نشان داده شده است، کوتاه ترین مسیر به دست آمده با استفاده از الگوریتم سنتی کوتاه ترین مسیر ممکن است دارای کوتاه ترین طول در هندسه (4001.9 متر) باشد. با این حال، موقعیتهای متعددی رخ میدهد که کامیونها به چپ یا راست میپیچند، که کل زمان صرف شده توسط کامیونهای بزرگ در جاده را افزایش میدهد. با استفاده از الگوریتم پیشنهادی در این مقاله، اگرچه مسافت هندسی طولانی تری پوشش داده شده است (4009 متر)، موارد بیشتری از مستقیم رفتن یا گردش به راست در تقاطع های جاده ثبت شد. حتی اگر مواردی از چرخش به چپ وجود داشته باشد، زاویه فرمان نسبتاً کوچک است. بنابراین، کامیون های حمل و نقل می توانند به طور موثر در زمان صرف شده در جاده صرفه جویی کنند.
4. آزمایش ها و تحلیل های مقایسه ای
برای بررسی اثربخشی و برتری الگوریتم تحلیل کوتاهترین مسیر بر اساس شبکه با مقادیر وزنی گوشه جاده در انتخاب مسیر طرح حملونقل بار بزرگ، این مقاله بهطور تصادفی 10 بلوک دیگر از مناطق جادهها را بهعنوان نمونه آزمایشی انتخاب کرد. که در آن الگوریتم سنتی و الگوریتم های بهبود یافته از کوتاه ترین مسیر به دست آمده مقایسه شدند. جدول 3 نتایج آزمایش ما را نشان می دهد.
در مقایسه با الگوریتم سنتی، الگوریتم بهبودیافته مزایای آشکاری را برای کامیون های بزرگ در هنگام چرخش ارائه می دهد، حتی اگر کوتاه ترین فاصله هندسی را ارائه نمی دهد. همانطور که در جدول نشان داده شده است، زمانی که شبکه جاده ها دارای توزیع شبکه ای منظم است، مسیر محاسبه شده توسط الگوریتم مسیر بهینه ارائه شده در این مقاله اساساً با مسیری که توسط الگوریتم سنتی ساخته شده است مطابقت دارد. با این حال، زمانی که جاده ها به شکل یک شبکه نامنظم هستند، الگوریتم مسیر بهینه به طور موثر تعداد پیچ های به چپ توسط کامیون های بزرگ را در فرآیند حرکت کاهش می دهد، با این فرض که طول کل مسیر به میزان قابل توجهی افزایش نمی یابد. تعداد مستقیم نیز تا حدی بهبود یافته است. با در نظر گرفتن تمامی عوامل،
مقایسه زمان مصرف شده برای عبور از تمام مسیرها در آزمایشهای ذکر شده در بالا، در شکل 9 نشان داده شده است، با الگوریتم سنتی و مدل مصرفی فرمان بر اساس پیچها در تقاطعهای جادهای که در این مقاله پیشنهاد شده است (با فرض اینکه کامیونهای بزرگ با سرعت متوسط 15 کیلومتر در ساعت حرکت کنید).
همانطور که در شکل 9 نشان داده شده است، کل زمان صرف شده برای عبور از مسیر با استفاده از الگوریتم کوتاهترین مسیر بر اساس اندازه گوشه کمتر از الگوریتم کوتاهترین مسیر سنتی است. مزیت استفاده از الگوریتم نیز کاملاً آشکار است.
جدول 3. نتایج آماری تجزیه و تحلیل مناطق آزمایشی که به صورت تصادفی نمونه گیری شدند.

شکل 9. کل زمان صرف شده توسط کامیون های بزرگ برای عبور از مسیرهای مختلف با الگوریتم سنتی کوتاه ترین مسیر و الگوریتم بر اساس اندازه گوشه ها.
برای تأیید بیشتر اینکه الگوریتم کوتاهترین مسیر مبتنی بر گوشهها دارای ویژگیهای بهتری برای کامیونهای بزرگ برای عبور از تقاطعهای جادهای نسبت به آنالیز کوتاهترین مسیر سنتی است، تجزیه و تحلیل آماری انجام شد. مقایسه امکان گردش به چپ، مستقیم رفتن و گردش به راست نیز در نتیجه مسیرهای انتخاب شده بر اساس هر دو الگوریتم ذکر شده در بالا، با در نظر گرفتن شرایطی با تعداد تقاطع های یکسانی که کامیون های بزرگ از آن عبور کرده اند نشان داده شده است ( شکل 10 و شکل 11 ).
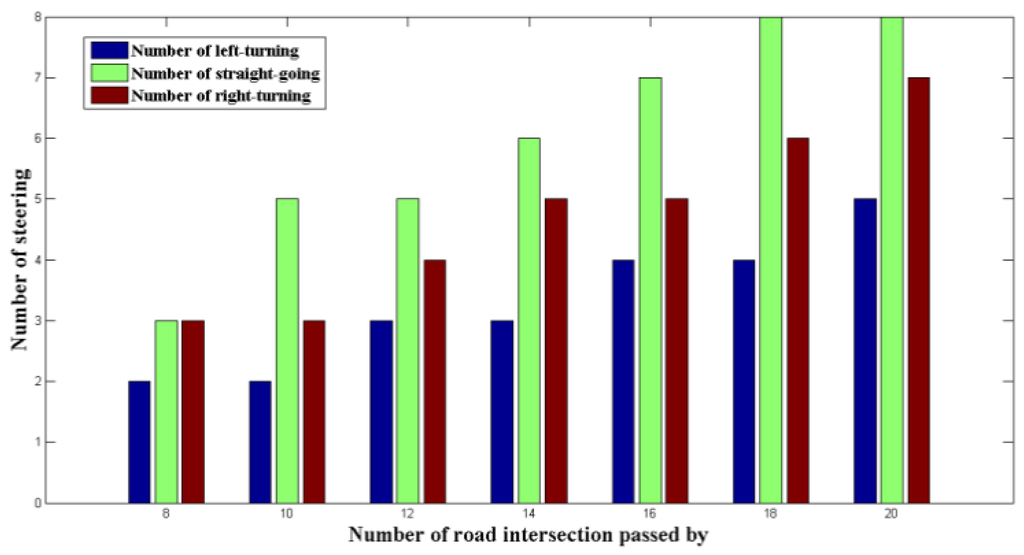
شکل 10. آمار تعداد پیچ های انجام شده در تقاطع های جاده با استفاده از الگوریتم کوتاه ترین مسیر بر اساس اندازه گوشه.
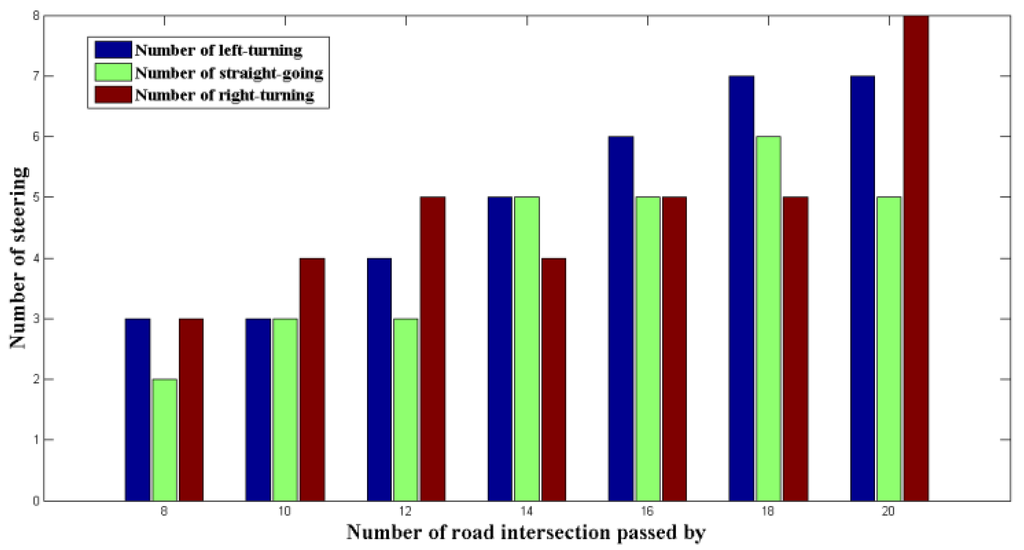
شکل 11. آمار تعداد پیچ های انجام شده در تقاطع های جاده ها بر اساس الگوریتم سنتی کوتاه ترین مسیر.
همانطور که در شکل 10 و شکل 11 نشان داده شده است، برای مسیری که با الگوریتم کوتاه ترین مسیر بر اساس اندازه گوشه های جاده به دست می آید، احتمال حرکت مستقیم به میزان زیادی بهبود یافته و تعداد پیچ های چپ به طور موثر در مقایسه با الگوریتم سنتی کوتاه ترین مسیر، که می تواند زمان صرف شده توسط کامیون های حمل و نقل برای چرخش در تقاطع های جاده را به طور قابل توجهی کوتاه کند. هر چه بیشتر از تقاطع ها توسط کامیون ها عبور کنند، این ویژگی آشکارتر می شود.
به طور خلاصه، الگوریتم کوتاهترین مسیر بر اساس مقادیر وزنی گوشهها در تقاطعهای جادهای که در این مقاله پیشنهاد شده است، میتواند مسیر بهینهای را محاسبه کند که با توجه به اندازه گوشه در تقاطعهای جاده در طول مسیر، کوتاهترین زمان را برای چرخش کامیونهای حملونقل ارائه میدهد. این نه تنها فشار ترافیک کامیون های حمل و نقل را در تقاطع های جاده ای کاهش می دهد، که کل زمان کار کامیون های حمل و نقل در جاده را کوتاه می کند، بلکه نیاز به ویژگی های پیچیده در شبکه جاده ها را برطرف می کند و به حل مشکلات مربوط به مسیر کمک می کند. انتخاب با صنعت حمل و نقل محموله بزرگ در چین.
5. نتیجه گیری ها
این تحقیق با پردازش و مدلسازی دادههای شبکه راههای شهری، همراه با نیاز عملیاتی سیستم حملونقل بار بزرگ، مدلی وزنی را طراحی کرده است که بر اساس اندازه نبشی در تقاطعهای جادهای است. از طریق تحلیل الگوریتم سنتی کوتاهترین مسیر، مدل با الگوریتم کلاسیک Dijkstra معرفی میشود و الگوریتمی از تحلیل مسیر بهینه با بحث مفصل در مورد نظریه و تحقق ارائه میشود. این مدل اشکالات الگوریتم سنتی را که فقط طول یا عرض جاده را در نظر می گیرد، کنار می گذارد. نتایج تجربی نشان دادهاند که این الگوریتم میتواند زمان چرخش کامیونها در تقاطعهای جادهای در شبکههای حملونقل پیچیده را کاهش دهد، که در برنامهریزی واقعی مسیرهای رانندگی برای کامیونهای بزرگ امکانپذیر است.
مسیر عملیاتی برای کامیون های حمل و نقل محاسبه شده توسط الگوریتم مسیر بهینه پیشنهاد شده در این مقاله نه تنها می تواند به عنوان یک استراتژی جدید برای کاهش ازدحام عمل کند، بلکه می تواند سیستم های حمل و نقل ناکارآمد را در مناطق شهری امروز بهبود بخشد و در برنامه ریزی مسیر در شهرها راهنمایی کند. جریان ترافیک متمرکز در چند جاده نیز فشار بر ترافیک جاده را افزایش می دهد. بر این اساس، استفاده از الگوریتم مسیر بهینه ارائه شده در این مقاله برای توسعه مسیر دویدن برای وسایل نقلیه می تواند سیستم حمل و نقل شهری را اصلاح کند که به طرق خاصی در انحراف ترافیک نقش دارد. الگوریتم کوتاهترین مسیر بر اساس اندازه گوشه در تقاطعهای جادهای که در این مقاله پیشنهاد شده است، نتایج خوبی را در عمل به دست میآورد و کاربردهای بالقوه را نشان میدهد.
منابع
- Rong, XF The Desigh از سیستم پشتیبانی انتخاب مسیر حمل و نقل محموله خارج از اندازه درباره شرکت J. پایان نامه کارشناسی ارشد، دانشگاه چانگان، شیان، چین، 2013. [ Google Scholar ]
- Zhang، YK تحقیق در مورد بهینه سازی برنامه های حمل و نقل محموله های بزرگ بر اساس آنتروپی متقابل. پایان نامه کارشناسی ارشد، دانشگاه چانگان، شیان، چین، 2013. [ Google Scholar ]
- لی، اچ. مطالعه در مورد انتخاب و بهینه سازی لجستیک محموله های حجیم بر اساس الگوریتم های ژنتیک. پایان نامه کارشناسی ارشد، دانشگاه اقیانوس چین، چینگدائو، چین، 2011. [ Google Scholar ]
- یانگ، پی. مطالعه روی تجهیزات در مقیاس بزرگ انتخاب مسیر حمل و نقل بزرگراه. پایان نامه کارشناسی ارشد، دانشگاه شیهوا، چنگدو، چین، 2013. [ Google Scholar ]
- گیزبرگر، آر. Vetter, C. مسیریابی کارآمد در شبکه های جاده ای با هزینه های نوبت. در مجموعه مقالات دهمین سمپوزیوم بین المللی الگوریتم های تجربی، کرت، یونان، 5-7 مه 2011.
- Xiao، HP; چن، LL; پنگ، تی. روش تحلیل کوتاهترین مسیر جادههای شهری بر اساس موتور ArcGIS. معدن فلز 2008 ، 12 ، 98-100. [ Google Scholar ]
- Shi, Y. تحقیق بهینه سازی در راه حل های حمل و نقل لجستیک پروژه. پایان نامه کارشناسی ارشد، دانشگاه دریایی دالیان، دالیان، چین، 2013. [ Google Scholar ]
- Caldwell, T. در مورد یافتن حداقل مسیرها در یک شبکه با جریمه های نوبتی. اشتراک. ACM 1961 ، 4 ، 107-108. [ Google Scholar ] [ CrossRef ]
- نیلسن، OA; فردریکسن، RD; Simonsen, N. استفاده از قوانین سیستم خبره برای ایجاد داده ها برای تقاطع ها و پیچ ها در شبکه های جاده ای. بین المللی ترانس. اپراتور Res. 1998 ، 5 ، 569-581. [ Google Scholar ] [ CrossRef ]
- گوتیرز، ای. مداگلیا، الگوریتم برچسبگذاری AL برای مشکل کوتاهترین مسیر با ممنوعیت چرخش با کاربرد در شبکههای جادهای در مقیاس بزرگ. ان اپراتور Res. 2008 ، 157 ، 169-182. [ Google Scholar ] [ CrossRef ]
- فنگ، جی. موکای، ن. Watanabe، T. نمایش شبکه حمل و نقل و جستجوی مداوم نزدیکترین همسایه. DBSJ Lett. 2003 ، 2 ، 1-4. [ Google Scholar ]
- آنز، جی. د لا بارا، تی. پرز، ب. نمایش نمودار دوگانه شبکه های حمل و نقل. ترانسپ Res. قسمت B 1996 ، 30 ، 209-216. [ Google Scholar ] [ CrossRef ]
- باند، اچ. جیانگ، جی. چن، جی. Cao, Y. یک الگوریتم دایکسترا مبتنی بر قوس برای جریمه چرخش جاده در سیستم ناوبری خودرو. Acta Geod. کارتوگر. گناه 2002 ، 31 ، 366-368. [ Google Scholar ]
- DʼAngelo، G. دمیدیو، ام. Frigioni، D. یک الگوریتم مسیریابی کوتاه ترین مسیر بدون حلقه برای شبکه های پویا. نظریه. محاسبه کنید. علمی 2014 ، 516 ، 1-19. [ Google Scholar ] [ CrossRef ]
- لیو، QY; Du, WZ طراحی و پیاده سازی سیستم تحلیل کوتاه ترین مسیر توزیع لجستیک بر اساس سرور ArcGIS. علمی Surv. نقشه 2010 ، 35 ، 197-198. [ Google Scholar ]
- ون، اچ. لیو، YF; ژنگ، جی اچ. Yan, L. مطالعه مدل داده برای شبکه های حمل و نقل عمومی بر اساس زنجیره زمانی. Geogr. اطلاعات جغرافیایی علمی 2005 ، 3 ، 35-38. [ Google Scholar ]
- وانگ، اچ ام. تحلیل کوتاه ترین مسیر ژو، XZ و کاربرد آن در سیستم های شبکه Acta ArmamentT. 2006 ، 3 ، 515-518. [ Google Scholar ]
- وانهاو، اس. Fack، V. برنامه ریزی مسیر با محدودیت های نوبتی: یک آزمایش محاسباتی. اپراتور Res. Lett. 2012 ، 40 ، 342-348. [ Google Scholar ] [ CrossRef ]
- زمستان، S. مدل سازی هزینه های پیچ در برنامه ریزی مسیر. GeoInformatica 2002 ، 6 ، 345-361. [ Google Scholar ] [ CrossRef ]
- Sun، WW; لیو، سی. لین، HF; مدل داده Xie، SM T-GIS برای شبکه راه های مجتمع شهری. J. Tongji Univ. 2012 ، 1 ، 127-132. [ Google Scholar ]
- پراساد، V. سیستم های اطلاعات جغرافیایی برای حمل و نقل – اصول و کاربردها. فتوگرام ضبط 2005 ، 20 ، 394-395. [ Google Scholar ] [ CrossRef ]
- Huang، DF الگوریتم کلیدی در تحلیل کوتاهترین مسیر GIS. ژئوتک شهری. سرمایه گذاری Surv. 2007 ، 4 ، 68-71. [ Google Scholar ]
- جیانگ، بی. Liu, XT محاسبه مسیرهای نقشه با کمترین گردش بر اساس اتصال جادههای طبیعی. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1069-1082. [ Google Scholar ] [ CrossRef ]
- لی، م. تحلیل و تحقیق کوتاه ترین مسیر شبکه راه منطقه ای بر اساس هزینه ها. پایان نامه کارشناسی ارشد، دانشگاه علم و فناوری چانگشا، چانگشا، چین، 2007. [ Google Scholar ]
- لو، تحقیق RF در مورد سازماندهی و مدیریت ترافیک گردش به چپ در تقاطعهای جادهای شهری. پایان نامه کارشناسی ارشد، دانشگاه چانگ آن، شیان، چین، 2010. [ Google Scholar ]
- خو، ژ. لیانگ، جی جی طراحی و پیاده سازی الگوریتم تحلیل کوتاه ترین مسیر بر اساس خط آسمان. ژئوتک شهری. تحقیق کنید. Surv. 2008 ، 4 ، 31-33. [ Google Scholar ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر