1. معرفی
میدان گرانش زمین، که مسئول ساختار و شکل زمین است، برای بسیاری از تحقیقات و کاربردهای مبتنی بر علم زمین و همچنین برای کاربردهای عملی در اطلاعات جغرافیایی از اهمیت اولیه برخوردار است. وزن سنجی هوابرد، که قادر به تعیین گرانش با وضوح متوسط تا بالا است، دارای مزیت پوشش سریع مناطق وسیعی از زمین با صرفه اقتصادی قابل توجه نسبت به روش های دیگر است [1 ، 2 ، 3 ، 4 ، 5 ] . در طول دو دهه گذشته، گرانش سنجی هوابرد پیشرفت بزرگی داشته است تا جایی که سیستم های پیشرفته استراپ داون می توانند میدان گرانش را با وضوح فضایی چند کیلومتری با سطح دقت چند میلی گال ترسیم کنند [ 6 ،7 ، 8 ].
هدف سیستم اندازه گیری ادغام شده در وزن سنجی هوابرد تخمین بردار اختلال گرانشی است [ 9 ]. طبق قانون دوم حرکت نیوتن و تعریف اختلال گرانش [ 10 ]، در یک قاب اینرسی، بردار اختلال گرانش را می توان مستقیماً از شتاب کل f i که توسط شتاب سنج های گرانش سنج حس می شود، محاسبه کرد، شتاب حرکتی. r¨من �¨منهواپیما و میدان گرانشی معمولی ϓ. این رابطه را می توان با معادله زیر بیان کرد [ 11 ]
به ظاهر ساده، اجرای عملی معادله (1) کاملاً درگیر است – نویز سیستم بسیار زیاد است. نسبت نویز به سیگنال داده های گرانشی اندازه گیری شده بدون فیلتر می تواند 1000 میلی گال یا بیشتر باشد. بیشتر نویز به نویز فرکانس بالا ناشی از ارتعاش هواپیما و گسترش نویز مشاهده GPS در فرآیند محاسبه شتاب هواپیما تعلق دارد [ 6 ، 9 ]. راه واضح برای از بین بردن نویز فرکانس بالا فیلتر پایین گذر است. فیلترهای پاسخ ضربه محدود (FIR) و پاسخ ضربه نامحدود (IIR) دو فیلتر کم گذر پرکاربرد در پردازش داده های گرانشی هوا هستند. به عنوان مثال، دانشگاه کلگری از فیلتر FIR برای پردازش داده های INS (SINS) استفاده کرده است [ 7]] و Sun فیلتر FIR را برای استخراج اختلال گرانشی دادههای آزمایش گرانشسنج نوع S LaCoste و Romberg (LCR) در چین امتحان کرده است [ 12 ، 13 ]. فیلتر Butterworth که یکی از انواع فیلتر IIR است، توسط فورسبرگ برای پردازش دادههای آزمایش LCR در گرینلند و امارات متحده عربی مورد بررسی قرار گرفته است [ 14 ، 15 ]. برخی دیگر از روش های هموارسازی پایین گذر مورد استفاده در وزن سنجی هوابرد را می توان در جکلی [ 16 ]، کوون [ 11 ]، سنوباری [ 17 ]، استودینگر [ 18 ] و غیره یافت.مزیت بارز فیلتر پایین گذر اجرای ساده و آسان است. با این حال، این واقعیت است که محتوای فرکانس بالا لزوماً فقط به نویز تعلق ندارد، به ویژه برای سیستم هوابرد، که در یک محیط پویا بالا قرار دارد. علاوه بر این، نویز می تواند در طیف وسیعی از فرکانس ها وجود داشته باشد. اثرات خطاهای نگرش و دینامیک هواپیما اغلب باعث ایجاد خطاهای مشاهده با فرکانس پایین تر می شود. فیلترهای پایین گذر کار نمی کنند مگر اینکه طول فیلتر کمتر از دوره حرکت فوگوئید نباشد [ 19 ، 20 ]. حتی اگر هم نویز و هم سیگنالها در طول موج پایینتر حذف میشوند، هنوز مقداری نویز در باند عبور وجود دارد که دقت نتیجه را آلوده میکند [ 5 ].
تجزیه حالت تجربی (EMD) که در سال 1998 توسط هوانگ از ناسا پیشنهاد شد، پتانسیل تخمین و تجزیه و تحلیل روند داده ها را دارد [ 21 ]. این یک روش تجزیه و تحلیل زمان-فرکانس برای پردازش یک سیگنال غیر ثابت غیرخطی است که در زمینه های تجزیه و تحلیل سیستم غیرخطی، ژئوفیزیک، هواشناسی و بیومکانیک [22، 23، 24 ] استفاده شده است . با این حال، مقالات کمی وجود دارد که از EMD برای حذف نویز دادههای خام گرانشی هوابرد استفاده کرده باشد. اگرچه Lu [ 25 ] و Cai [ 26 ] تلاش کرده اند داده های گرانش هوا را توسط EMD حذف کنند، تحقیقات بیشتری برای آزمایش کارایی EMD مورد نیاز است.
در این مطالعه، ما سعی میکنیم از EMD برای حذف نویز دادههای گرانشی هوابرد خام بهدستآمده توسط گرانش سنج هوابرد SGA-WZ در سال 2012 در گرینلند استفاده کنیم. ابتدا، مقدمات حذف نویز EMD نشان داده شدهاست. پس از توصیف و تجزیه و تحلیل دادههای بهدستآمده از پروفایلهای پرواز مکرر اولیه SGA-WZ، EMD برای تخمین اختلالات گرانشی از دادههای خام استفاده میشود.
2. اصل EMD Denoising
EMD، که پتانسیل تخمین روند داده ها را دارد، یک تکنیک جدید برای تجزیه یک سیگنال داده شده به مجموعه ای از توابع حالت ذاتی محدود (IMFs) است [ 21 ]. صندوق بینالمللی پول یک نوع تابع است که در آن تعداد عبور از صفر برابر است با تعداد اکسترمها، و پوششهای بالایی و پایینی که به ترتیب با حداکثر و حداقل محلی تعریف میشوند متقارن هستند [21 ، 27 ] .
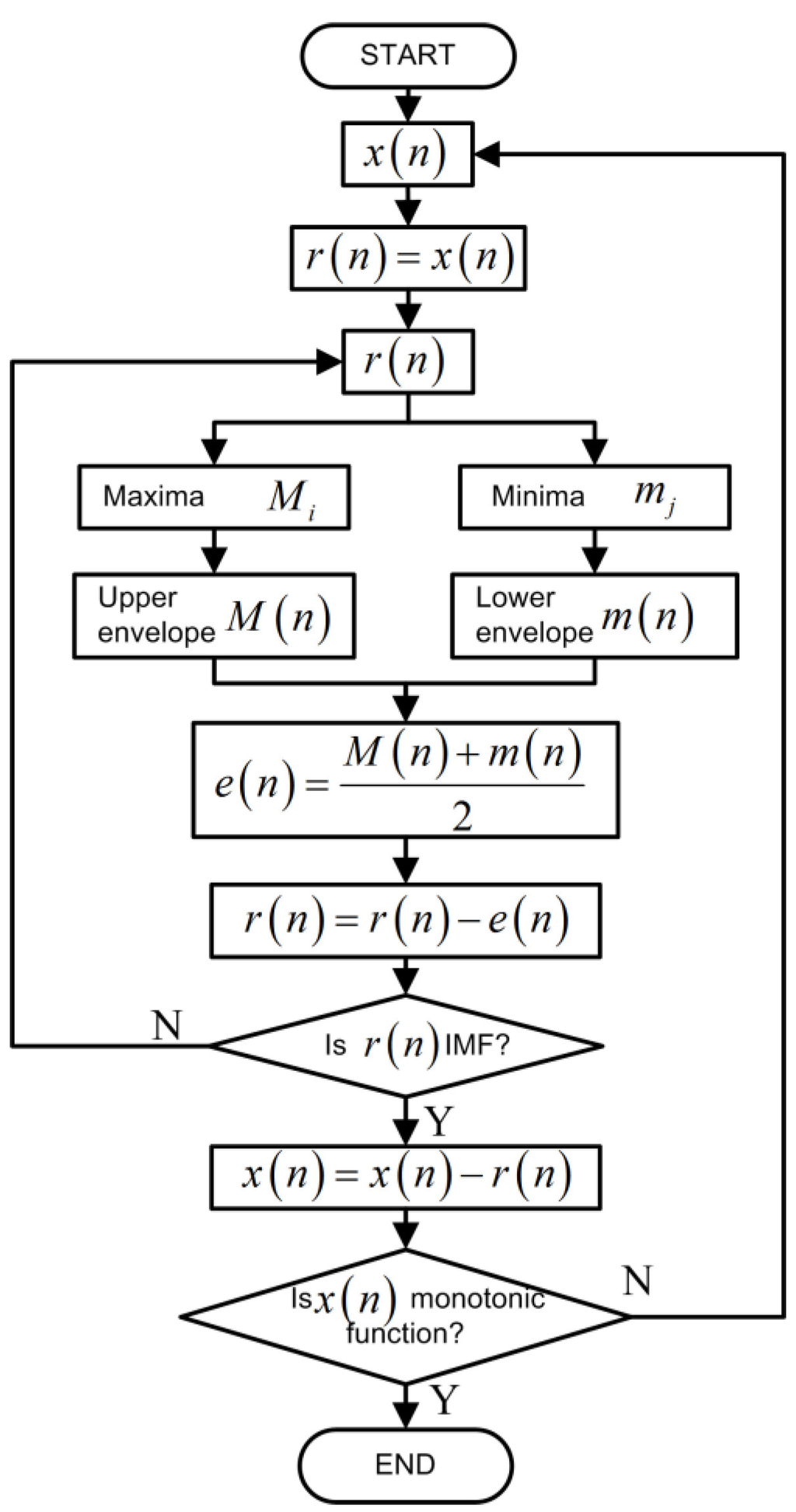
با توجه به هر سیگنال زمانی گسسته x ( n )، n = 1، 2، 3، …، N ( N تعداد نمونه کل است)، فرآیند استخراج IMF از سیگنال x ( n ) یک روش تکراری است که الگوریتم غربالگری نامیده می شود. شکل 1 فرآیند اصلی الگوریتم الک را نشان می دهد که شامل مراحل زیر است:
مرحله 1: فرض کنید r ( n ) = x ( n ) به عنوان مرحله اولیه.
مرحله 2: تمام گزاف های محلی را بیابید، ماکزیمم ها را با M i ( i = 1, 2, …, I ) و حداقل ها را با m j ( j = 1, 2, …, J ) نشان دهید.
مرحله 3: پاکت های بالایی و پایینی r ( n ) را از درون یابی M i و M j بدست آورید که می تواند به صورت نشان داده شود. م( n ) : =fم(ممن، ن )م(�):=�م(ممن،�)و m ( n ) : =fم(مترمن، ن )متر(�):=�م(مترمن،�)به ترتیب.
مرحله 4: میانگین پاکت های بالا و پایین را به عنوان محاسبه کنید e ( n ) =م( n ) + m ( n )2ه(�)=م(�)+متر(�)2.
مرحله 5: باقیمانده را با کم کردن e ( n ) از سیگنال بدست آورید: r ( n ) = r ( n ) – e ( n ) . باقیمانده r ( n ) و اینکه آیا الزامات صندوق بین المللی پول را برآورده می کند را بررسی کنید. اگر باقیمانده تعریف صندوق بین المللی پول را برآورده نمی کند، مراحل از مرحله 2 تا مرحله 5 را تکرار کنید تا زمانی که انجام شود. اگر r ( n ) یک صندوق بین المللی پول باشد، اولین IMF به دست می آید که imf ( n ) = r ( n ) است.
مرحله 6: پس از به دست آوردن یک IMF جدید، r ( n ) را از سیگنال اصلی x ( n ) حذف کنید و سیگنال جدید تحت بررسی x ( n ) = x ( n ) – imf ( n ) است. مراحل قبلی را تکرار کنید و زمانی که باقیمانده نهایی به یک تابع یکنواخت تبدیل شود، فرآیند الک متوقف خواهد شد.
در نهایت به سیگنال بیان شده به عنوان نتیجه EMD دست یافتیم:
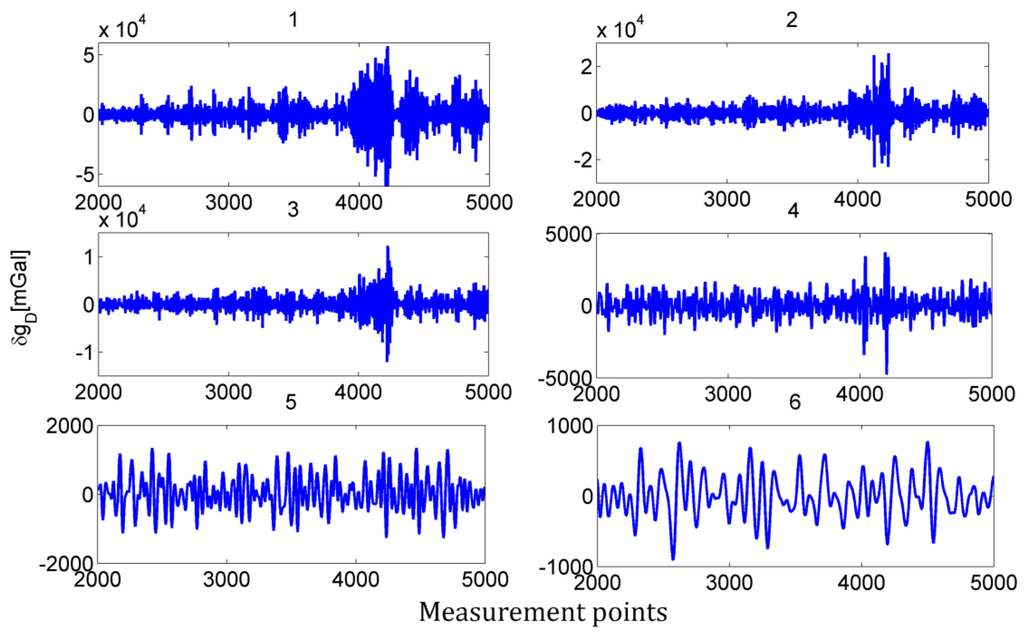
که در آن K تعداد کل صندوق های بین المللی پول و r(n) باقیمانده نهایی است. شکل 2 ، به عنوان مثال، شش نتیجه تجزیه شده برتر مجموعه ای از داده های خام را نشان می دهد که در این مطالعه پردازش خواهند شد. میتوانیم متوجه شویم که نویز بر حالتهای زمانی فرکانس بالاتر غالب است در حالی که سیگنال بر حالتهای پایینتر غالب است. با توجه به این پدیده، امکان استخراج سیگنال از داده های نویزدار وجود دارد.
شکل 1. فرآیند اصلی الگوریتم الک EMD. اگر باقیمانده نهایی یک تابع یکنواخت باشد، این روش متوقف می شود. نتیجه مجموعه ای از صندوق های بین المللی پول و باقیمانده است.
شکل 2. نمونه ای از داده های خام تجزیه شده توسط EMD (فقط شش صندوق بین المللی پول برتر نشان داده شده است). نمودار بالا سمت چپ اولین صندوق بین المللی پول است و نمودار پایین سمت راست ششمین صندوق بین المللی پول است. نویز در همه صندوقهای بینالمللی پول وجود دارد، اما بر فرکانس بالاتر صندوق بینالمللی پول غالب است.
مشخص کن منمتر˜fکمنمتر˜�کبه عنوان صندوق بین المللی پول فاسد با سر و صدا wک�کو من _fکمنمتر�کبه عنوان یک صندوق بین المللی پول خالص، بنابراین منمتر˜fکمنمتر˜�کرا می توان به صورت نوشت منمتر˜fک= من م fک+ wکمنمتر˜�ک= منمتر�ک+ �ک. هدف حذف نویز این است که صندوق بین المللی پول خالص را از صندوق پر سر و صدا استخراج کنیم. با این حال، در عمل، ما فقط می توانیم برآورد صندوق بین المللی پول خالص را به دست آوریم منمترˆfکمنمتر^�ک. سپس، سیگنال حذف شده را می توان به صورت نوشتاری نوشت
و اکنون مشکل اصلی این است که چگونه به دست آوریم منمترˆfکمنمتر^�ک. از آنجایی که نویز بر حالتهای زمانی فرکانس بالاتر و سیگنال بر حالتهای پایینتر غالب است، سادهترین روش حذف IMF با فرکانس بالاتر است. اگر این اتفاق بیفتد، روش حذف نویز EMD مانند یک فیلتر پایین گذر عمل می کند [ 28 ]. با این حال، نویز می تواند در هر دو فرکانس بالا و فرکانس پایین IMF توزیع شود. در این مقاله، ما سعی کردیم از یک آستانه نرم برای برآورد تمام صندوق های بین المللی پول استفاده کنیم. تابع آستانه که به طور گسترده در حذف نویز انقباض موجک استفاده می شود به صورت زیر تعریف می شود [ 29 ]:
جایی که تیکتیکآستانه است من _fکمنمتر�ک. انتخاب مقدار آستانه یک مشکل اساسی برای جلوگیری از هموار شدن بیش از حد یا کمتر از حد است. مقدار آستانه انتخاب شده در این مطالعه، آستانه جهانی است که برابر است 2 ln N–––––√2لوگاریتمن[ 29 ، 30 ].
3. نتایج تجربی
3.1. شرح تست
داده های مورد استفاده در این مطالعه از مشخصات پرواز اولیه SGA-WZ در مرکز گرینلند شرقی در سال 2012 بود. هدف از این آزمایش، با همکاری دانشگاه فنی دانمارک (DTU) فضایی و دانشگاه ملی فناوری دفاع (NUDT) انجام شد. )، برای ارزیابی تکرارپذیری و همچنین دقت گرانش سنج هوابرد جدید در مناطق قطب شمال است.
SGA-WZ همراه با گیرنده GPS بر روی یک سمور دوقلوی Nordlandair در ایسلند مجهز شد. برای انجام موقعیت یابی DGPS، یک ایستگاه پایه نیز بر روی زمین عملیاتی شد. هر دو داده GPS با سرعت 1 هرتز جمع آوری شدند و داده های شتاب سنج و ژیروسکوپ خام از SINS با نرخ داده 2 کیلوهرتز ثبت شدند.
شکل 3 مشخصات پرواز در آزمایش گرینلند و پوشش موجود زمینی، دریایی و هوایی منطقه را نشان می دهد. دو پروفیل دریایی مکرر اولیه از شمال به جنوب (نشان داده شده در خطوط سیاه پررنگ)، که با پروفایلهای پرواز فضایی قبلی DTU [ 14 ] منطبق بودند، در منطقهای با پوشش دادههای دریایی قرار داشتند. طول کل هر پروفیل تکراری حدود 300 کیلومتر، میانگین سرعت پرواز حدود 250 کیلومتر در ساعت و ارتفاع پرواز حدود 360 متر بود. جزئیات بیشتر در مورد این کمپین را می توان در ژائو [ 31 ] یافت .
شکل 3. مشخصات پرواز در آزمایش گرینلند و پوشش زمینی، دریایی و هوایی موجود در منطقه [ 31 ]. چهار نمایه پرواز که به رنگ سیاه نشان داده شده اند (خطوط پرواز اولیه به صورت پررنگ هستند) در مرکز گرینلند شرقی طراحی شده اند. شکست در خطوط C و D به دلیل تغییرات ارتفاع است. خطوط رنگ روشن دیگر داده های دریایی را نشان می دهد. نقطه سیاه نشان دهنده ایستگاه پایه GPS و رنگ ها ناهنجاری های هوای آزاد را نشان می دهند.
به منظور بررسی دقت خارجی حذف نویز EMD، دادههای گرانش هوابرد سابق و دادههای دریایی در اطراف این منطقه استفاده شد. پروفیل های هوابرد سابق در سال 2001 با گرانش سنج LCR پرواز کردند. دقت دادههای اندازهگیری کمتر از 2 میلیگال تحت وضوح حدود 6 کیلومتر نبود [ 14 ، 32 ]. از آنجایی که پروفیل های قدیمی دقیقاً با پروفایل های جدید منطبق نیستند، از داده های دریایی در اطراف این ناحیه برای پر کردن شکاف ها استفاده شد (خطوط رنگی را در شکل 3 ببینید.). ابتدا، داده های دریایی به صورت فضایی در مسیر زمینی پروازها درون یابی شدند. سپس ترکیب عددی دادههای دریایی با دادههای پرواز قدیمی به عنوان داده مرجع برای آزمون SGA-WZ استفاده شد. علاوه بر این، نتیجه قبلی از یک فیلتر FIR برای مقایسه آسان دقت داخلی یا خارجی ارائه شده است. توجه داشته باشید که وضوح و دقت نتیجه FIR با طول فیلتر متفاوت است. به عنوان مثال، در این مورد، وضوح یک FIR به طول 120 ثانیه (200 ثانیه) 4 کیلومتر (7 کیلومتر) و دقت داخلی 2.4 میلیگال (1.5 میلیگال) برای خط A است. در اینجا، تنها نتیجه 160 است. طول s FIR داده می شود زیرا وضوح متناظر با LCR یکسان است.
3.2. آماده سازی داده های خام
معادله (1) روابط بین اغتشاش گرانشی و کمیت های حاصل از سیستم گرانش سنجی هوابرد را نشان می دهد، اما اجرای عملی آن در چارچوب ناوبری به شرح زیر راحت تر است:
برای وزن سنجی اسکالر، فقط کمیت عمودی گرانش (سومین جزء معادله (5)) در نظر گرفته می شود که می توان آن را به صورت زیر نوشت:
جایی که زیرنویس ها مخفف Down در یک قاب بیضی شکل سطح محلی هستند، δآE�آ�تصحیح Eötvös نیز نامیده می شود [ 7 ، 33 ]. شکل 4 خلاصه ای از فرآیند استفاده از اندازه گیری های خام انجام شده توسط حسگرها برای استخراج اختلال گرانش خام را نشان می دهد.
شکل 4. خلاصه ای از فرآیند استفاده از اندازه گیری های خام انجام شده توسط حسگرها برای استخراج اختلال گرانش خام [ 31 ]. از نرم افزار Waypoint GrafNav برای تفسیر داده های GPS استفاده می شود. 15 حالت موجود در فیلتر کالمن خطای موقعیت ها، سرعت ها، نگرش ها، بایاس شتاب سنج ها و ژیروسکوپ ها هستند.
اولین گام، نمونه گیری مجدد و تفسیر اندازه گیری های خام از سیستم اکتساب داده است. از آنجایی که تمام دادههای اینرسی با نرخ 2 کیلوهرتز ثبت میشوند که نیازی به گرانیمتری هوابرد ندارد، این دادهها با میانگین بیش از 20 نمونه (100 هرتز) نمونهبرداری مجدد میشوند. از سوی دیگر، موقعیت و سرعت هواپیما که مشاهدات فیلتر کالمن (KF) خواهد بود و برای محاسبه تصحیح Eötvös در مرحله آخر استفاده میشود، با نرمافزار Waypo int GrafNav (نسخه 8.30) پردازش میشود و شتابها عبارتند از: با تمایز مضاعف موقعیت های GPS به دست می آید.
مرحله دوم به روز رسانی موقعیت، سرعت و ماتریس وضعیت هواپیما از این اندازه گیری های فیلتر شده است. یک فیلتر کالمن 15 حالته معمولی برای ادغام اندازهگیریهای SINS و DGPS استفاده میشود [ 34 ]. سپس، نیروی ویژه در یک قاب بیضی شکل سطح محلی از نمونهگیری مجدد شتابها (نیروی خاص در قاب بدنه) و ماتریس نگرش استخراج میشود.
در آخرین مرحله، مطابق معادلات (5) و (6)، اختلال گرانش خام در ارتفاع پرواز مستقیماً از تفاوت بین نیروی ویژه اندازهگیری شده و شتاب وسیله نقلیه پس از اعمال تصحیح Eötvös و کم کردن گرانش طبیعی تخمین زده میشود.
شکل 5 تفاوت بین نیروی ویژه INS و شتاب هواپیما به دست آمده از GPS در کانال عمودی را نشان می دهد که برای اثر Eötvös و گرانش طبیعی خطوط تکراری اولیه A و B به طور جداگانه تصحیح شده است. اختلاف بیش از 105 میلیگال که در شکل نشان داده شده است نشان میدهد که استخراج اختلال گرانشی از این دادههای نویز درست مانند جستجوی سوزن در انبار کاه است زیرا اختلال گرانش در مسافتی حدود 100 کیلومتر از 100 میلیگال تجاوز نمیکند [1, 35 ] .]. همچنین می توان مشاهده کرد که نویز در برخی از دوره های خط تکراری بسیار بیشتر از دوره چرخش 180 درجه هواپیما (با رنگ سبز نشان داده شده است) است. این نشان می دهد که این پرواز در شرایط سخت انجام شده است. در واقع، تغییرات عمدهای در جهت باد بهویژه در ناحیه دهانه رودخانهها وجود داشت (در شکل 3 مشاهده میشود )، که حرکت هواپیما را پیچیدهتر میکرد.
شکل 5. اندازه گیری گرانش خام پروفیل تکراری A ( بالا ) و B ( پایین ). بخش هایی که به رنگ آبی و قرمز نشان داده شده اند به طور جداگانه مسیر شمال و جنوب را نشان می دهند و خط سبز نشان دهنده زمان چرخش 180 درجه در طول پرواز است. این تفاوت بیش از 105 میلیگال متفاوت است .
طیف توان اندازه گیری های گرانش خام در شکل 6 نشان داده شده است . همانطور که از شکل 6 مشاهده می شود ، بیشتر نویز در طول موج کوتاه داده های خام هر دو پرواز مکرر توزیع می شود. اعتقاد بر این است که تقویت نویز مشاهده در فرآیند محاسبه شتاب هواپیما و اثرات ارتعاش هواپیما بر INS بخش اصلی نویز فرکانس بالا است. علاوه بر این، نویز در فرکانس پایین تر، به عنوان مثال، زیر 0.05 هرتز، می تواند ناشی از حرکت phugoid ماهیت هواپیما یا اثر خطاهای نگرش باشد. همچنین اشاره شده است که مقایسه داده های خام بین پرواز A و B در هر دو شکل 5 و شکل 6، نویز در پرواز B بسیار قوی تر از پرواز A است. این نشان می دهد که استخراج اختلال گرانشی از داده های خام پرواز B دشوارتر از پرواز A است.
شکل 6. طیف قدرت اختلال گرانش خام پروفیل تکراری A ( بالا ) و B ( پایین ). نویز در طیف وسیعی از فرکانس پخش می شود.
3.3. نتایج آزمون و تجزیه و تحلیل
پس از دریافت دادههای اندازهگیری خام، از EMD برای تخمین اختلال گرانش در ارتفاع پرواز در قاب n استفاده شد. از طریق آزمایش، سیزده و پانزده صندوق بین المللی پول به ترتیب برای پرواز A و پرواز B به دست آمد. برای به دست آوردن تخمین هر صندوق بین المللی پول خالص، از روش استفاده از آستانه نرم استفاده شد.
شکل 7. مقایسه اختلال گرانش هوابرد بین دو گذر از پرواز مکرر A ( بالا ) و B ( پایین ). خطوط آبی نشان دهنده گذر شمال و خط قرمز نشان دهنده مسیر جنوب است. خطوط خط تیره نشان دهنده EMD و خطوط نازک یکپارچه نشان دهنده FIR هستند. تفاوت های بزرگتر در حدود 71.5 درجه و 72.5 درجه ظاهر می شود.
تفاوت بین دو پاس از هر پرواز برای ارزیابی سازگاری داخلی اندازهگیریهای گرانش هوابرد استفاده شد. شکل 7 نتیجه نهایی اختلال گرانش را نشان می دهد که توسط EMD (نشان داده شده در خطوط خط تیره) و FIR (نشان داده شده در خطوط نازک توپر) حذف شده است. خطوط آبی نشان دهنده گذر شمال و خطوط قرمز نشان دهنده گذر به سمت جنوب است. مقایسه با داده های اندازه گیری خام (نشان داده شده در شکل 5، اثر حذف نویز EMD استفاده شده مشهود است. با این حال، برای ثبت روندهای جهانی مناسب است، اما برای پدیده های محلی شکست می خورد – برخی از خطاهای غیرمنتظره به ویژه در پرواز B وجود دارد. از آنجایی که بیشتر تفاوت ها در سیگنال طول موج بلند توزیع می شوند و محل خطاها با دهانه چندین منطبق است. رودخانه های اطراف عرض جغرافیایی شمالی 71.5 درجه و 72.5 درجه (در شکل 3 مشاهده می شود)، اعتقاد بر این است که خطاها، که به طور قابل توجهی از نویز سفید گاوسی منحرف می شوند، توسط حرکت هواپیما در محیط بسیار پویا ایجاد می شوند. ما با استفاده از روش اندازه گیری سازگاری داخلی پیشنهاد شده توسط Wei [ 7 ] ، ریشه میانگین مربع تفاوت بین تمام پاس های مکرر را محاسبه کرده ایم . میز 1تخمین تفاوت بین دو پاس هر پرواز را خلاصه می کند. نتایج رسمی FIR نیز در جدول 1 نشان داده شده است (در [ 31 ] مشاهده می شود). نتایج EMD مقادیر RMS را به ترتیب 0.9 و 1.6 برای پرواز A و B نشان می دهد. در مقایسه با نتایج FIR (1.5 و 2.6)، نسبت های بهبود متناظر هر دو پروفایل بیش از 40 درصد است. این نشان دهنده عملکرد خوب حذف نویز EMD است.
جدول 1. آمار تفاوت برای سازگاری داخلی (واحد: mGal).
برای تخمین دقت بیرونی نتیجه، دادههای گرانش هوابرد سابق بهدستآمده از LCR در سال 2001 و دادههای دریایی در اطراف این منطقه به عنوان دادههای مرجع خارجی استفاده شد. علاوه بر این، نتیجه استفاده از یک فیلتر FIR با طول 160 ثانیه که مطابق با وضوح مشابه داده های LCR است نیز ارائه شده است. شکل 8 اغتشاش گرانشی تخمینی را برای هر دو نمایه از این سه نوع داده نشان می دهد. بدیهی است که روند کلی این سه نتیجه در هر دو نمایه کمابیش یکسان به نظر می رسد. تفاوت کمی بین نتایج EMD و FIR وجود دارد. در مقایسه با داده های مرجع، نتیجه حذف نویز EMD کمی صاف تر از FIR است و به داده های مرجع نزدیک تر است. جدول 2آمار تفاوت ها را به عنوان تخمینی از دقت خارجی برای آن نتایج ارائه می دهد. تفاوت بین مقادیر RMS برای دو روش قابل توجه نیست. با این حال، برای حذف نویز EMD، نسبتهای بهبود متناظر هر دو نمایه، که به ترتیب حدود 9% و 12% هستند، حداقل دید خوبی از استفاده از EMD برای سرکوب نویز در دادههای گرانشی هوا نشان میدهند.
شکل 8. مقایسه بین نتایج تخمین زده شده FIR، EMD و داده های مرجع. خط آبی نشان دهنده نتیجه حذف نویز FIR، خط قرمز نشان دهنده نتیجه حذف نویز EMD، خط سبز داده های LCR و خط سیاه نشان دهنده داده های دریایی است. ( بالا ) پرواز مکرر A و ( پایین ) پرواز B است.
جدول 2. آمار تفاوت برای دقت خارجی (واحد: mGal).
4. نتیجه گیری
در این مقاله، ما سعی کردیم از EMD برای تخمین اختلال گرانشی از دادههای خام بهدستآمده از آزمون گرینلند SGA-WZ استفاده کنیم. از طریق محاسبات، با توجه به آمار دقت داخلی و دقت خارجی، اگرچه حذف نویز EMD برآورد دقیق تری از اختلال گرانشی را در مقایسه با FIR ارائه نکرده است، نتیجه حداقل نشان می دهد که حذف نویز EMD می تواند به عنوان ابزار خوبی برای سیگنال اختلال گرانش را از نویز در گرانش سنجی هوابرد استراپ داون استخراج کنید. علاوه بر این، هنوز در بخش های خاصی که حرکت هواپیما بسیار پیچیده بود، تفاوت های زیادی وجود دارد. اعتقاد بر این است که نویز در این مکان ها به طور قابل توجهی از نویز سفید گاوسی جدا می شود. روش پیچیده تر برای فیلتر کردن صندوق های بین المللی پول، به عنوان مثال،










بدون نظر