

خلاصه
کیلومتر شماری تصویری استریو ; LiDAR ; کاهش IMU GICP _ RISS ; ادغام _ EKF
1. معرفی
2. آثار قبلی
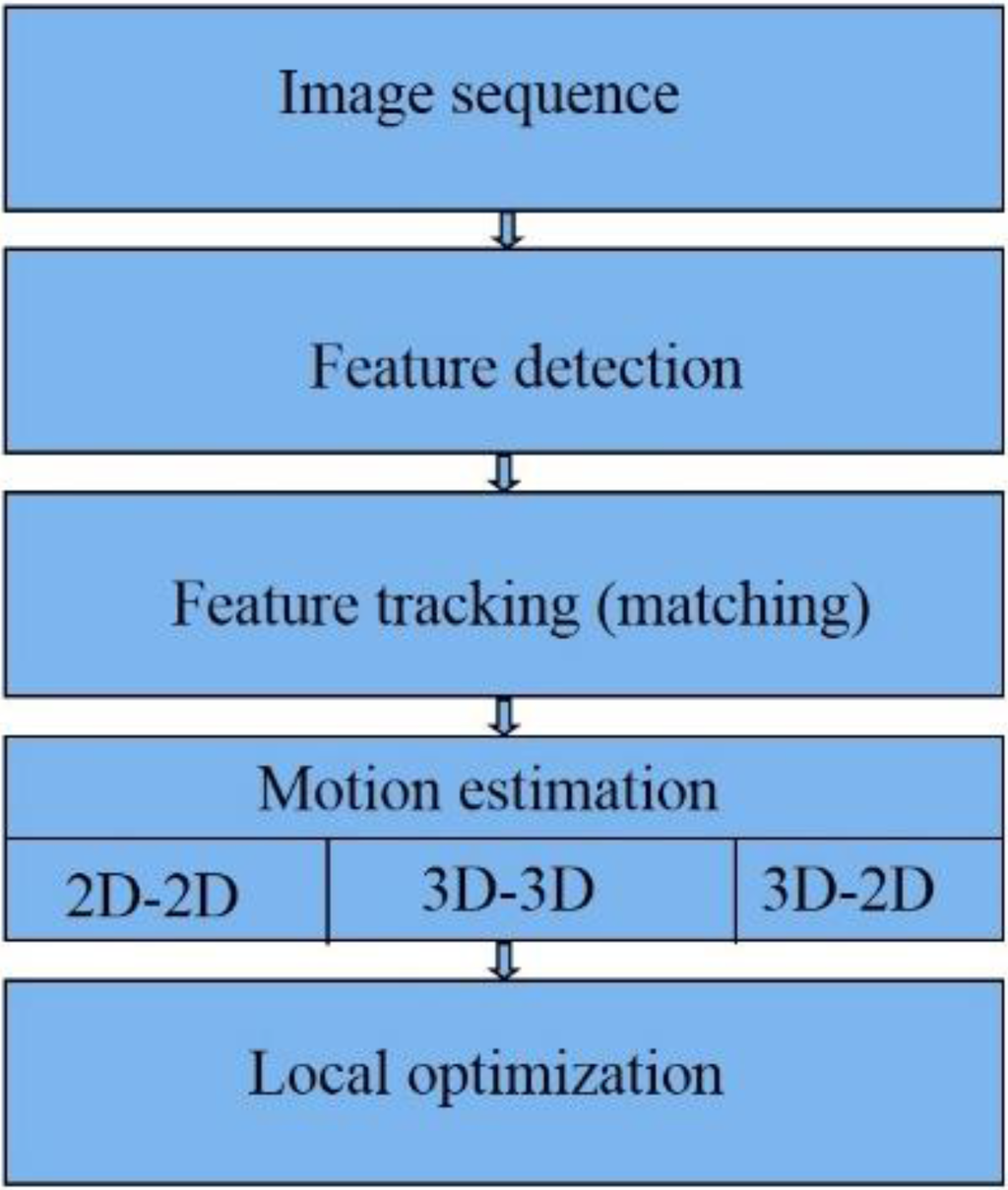
2.1. کیلومتر شماری بصری
- (1)
-
نور کافی در محیط وجود دارد
- (2)
-
اشیاء ثابت در تصویر بر اجسام متحرک غالب هستند
- (3)
-
بافت کافی برای استخراج حرکت ظاهری وجود دارد
- (4)
-
همپوشانی صحنه کافی بین فریم های متوالی وجود دارد
2.2. LiDAR Odometry
که در آن T و R بردار ترجمه و ماتریس چرخش بین دو مجموعه نقطه هستند، ایکسمنایکسمننقطه در ابر نقطه اول است و Yمن�مننقطه ابر نقطه دوم است.
جایی که nYمن��منبردار نرمال به سطح در نقطه است Yمن�من.
جایی که Q = (آر03 × 1تی1)س=(آرتی03ایکس11)، د=Yمن– ( رایکسمن+ تی)د=�من–(آرایکسمن+تی)، سیایکسمنسیمنایکسو سیYمنسیمن�ماتریس های کوواریانس محله های نقطه محلی هستند.
2.3. یکپارچه سازی حسگر
جایی که δv a n d δپ�� آ�د �پبه ترتیب خطاهای سرعت و موقعیت هستند. تعصب ژیروسکوپی افقی جبران نشده (بw)(ب�)خطای roll یا pitch را معرفی می کند ( δθ��) به شرح زیر [ 26 ]:
جایی که fایکس�ایکسشتاب در جهت x است، fy��شتاب در جهت y است، wz��سرعت زاویه ای در جهت z، g گرانش طبیعی است، vo d��دو آo dآ�دبه ترتیب سرعت کیلومتر شمار و شتاب کیلومتر شمار هستند. بنابراین، خطای roll و pitch محاسبه شده از RISS با زمان t تناسب ندارد [ 5 ]. علاوه بر این، کیلومتر شمار چرخ به جای ادغام خروجی های شتاب سنج، سرعت را فراهم می کند. بنابراین خطای چرخش و گام RISS بردار سرعت را به جای بردار شتاب سنج از قاب بدنه به قاب سطح محلی نشان می دهد که باعث خطای سرعت متناسب با t و خطای موقعیت متناسب با t2 می شود . خطای آزیموت ناشی از بایاس ژیروسکوپ عمودی جبران نشده تنها منبع اصلی خطا در RISS سه بعدی است.
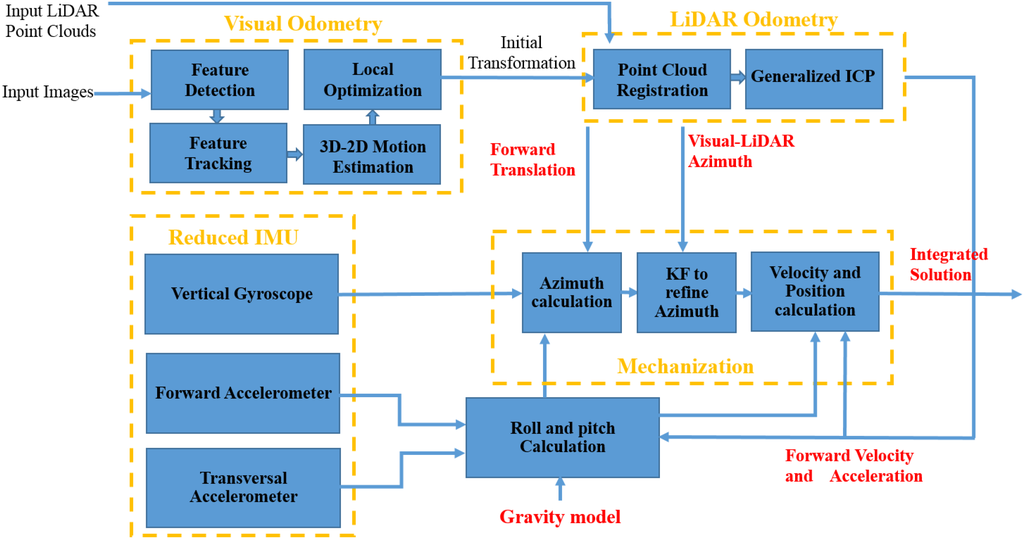
3. روش شناسی

جایی که: ایکس=⎛⎝⎜⎜ΔایکسVO – L i D A RکΔyVO – L i D A RکΔzVO – L i D A Rک⎞⎠⎟⎟= –(آرk + 1ک)– 1تیک ایکس=(∆ایکسک��–�من�آآر∆�ک��–�من�آآر∆�ک��–�من�آآر)=–(آرکک+1)–1تیک.
جایی که
wه�هسرعت چرخش زمین است، φ�عرض جغرافیایی وسیله نقلیه است، γzک=wzکΔ t�ک�=�ک�∆تی، آرنآرنشعاع انحنای عمود اول است.
جایی که δایکس^ک= [ δآzک، δwz] ، Φk − 1= [10– Δ t1- _βzΔ t] ، جیک= [0( 2βz v a r i a n c e (wz) )]�ایکس^ک=[�آ�ک،���] ، Φک–1=[1–∆تی01–��∆تی]، جیک=[0(2�� �آ�منآ�جه(��))]، βz �� زمان همبستگی برای بایاس ژیروسکوپ است، wz��اندازه گیری ژیروسکوپ حول محور z است، δwz ��� خطای ژیروسکوپ است. مدل اندازه گیری به شرح زیر است:
جایی که آرمآرمشعاع انحنا در نصف النهار است.
4. نتایج و تجزیه و تحلیل
4.1. توضیحات داده ها
-
GPS/IMU: OXTS RT 3003
-
اسکنر لیزری: Velodyne HDL-64E
-
دوربینهای مقیاس خاکستری، 1.4 مگاپیکسل: Point Grey Flea 2 (FL2-14S3M-C)
-
دوربینهای رنگی، 1.4 مگاپیکسل: Point Grey Flea 2 (FL2-14S3C-C)

4.2. کالیبراسیون سنسور
که در آن f فاصله کانونی و C x و C y مختصات مرکز اصلی هستند) و ضرایب اعوجاج تصویر. پارامترهای کالیبراسیون دوربین خارجی چرخش و ترجمه بین سیستم مختصات دوربین چپ و راست، ماتریس ضروری و ماتریس اساسی است [ 30 ، 31 ]. تصاویر KITTI استریو تصحیح شدند و تبدیل تصحیح و ماتریس طرح ریزی برای دوربین چپ و راست تخمین زده شد. دقت کالیبراسیون دوربین تاثیر زیادی بر مثلثسازی و برداشتن در VO دارد و کالیبراسیون نادقیق دوربین منجر به جابجایی سریعتر موقعیت در VO میشود. کیفیت کالیبراسیون دوربین استریو را می توان با استفاده از محدودیت هندسه اپی قطبی بررسی کرد [10 ، 30 ]. پیکسل مربوط به یک پیکسل در تصویر سمت چپ روی اپی لاین در تصویر سمت راست قرار دارد. این اپی لاین را می توان با رابطه (10) زیر بیان کرد:
جایی که ل“ل“در تصویر سمت راست اپی لاین است، x مختصات پیکسل ناهمگن در تصویر سمت چپ و F یک ماتریس 3×3 است که به عنوان ماتریس بنیادی شناخته میشود.
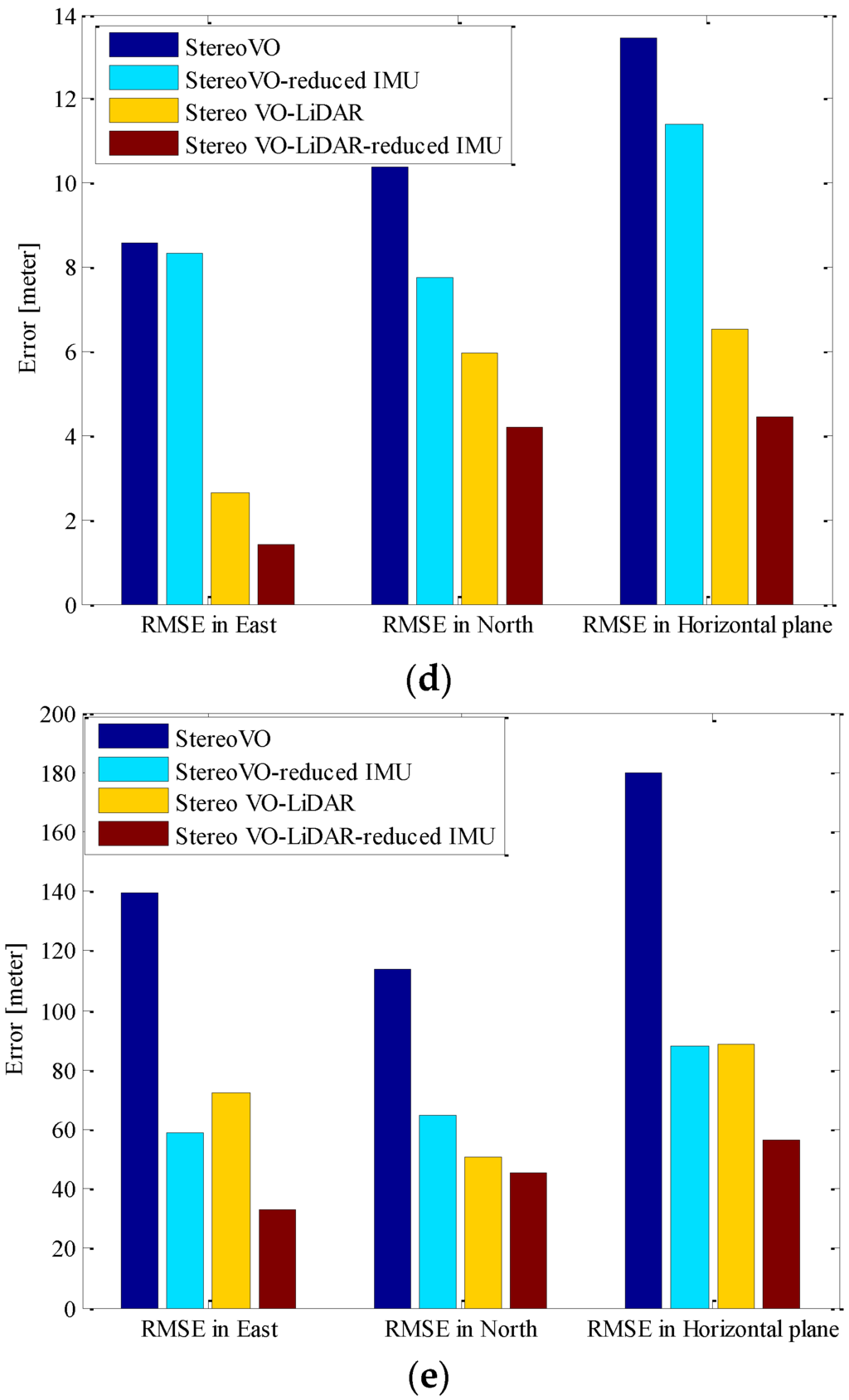
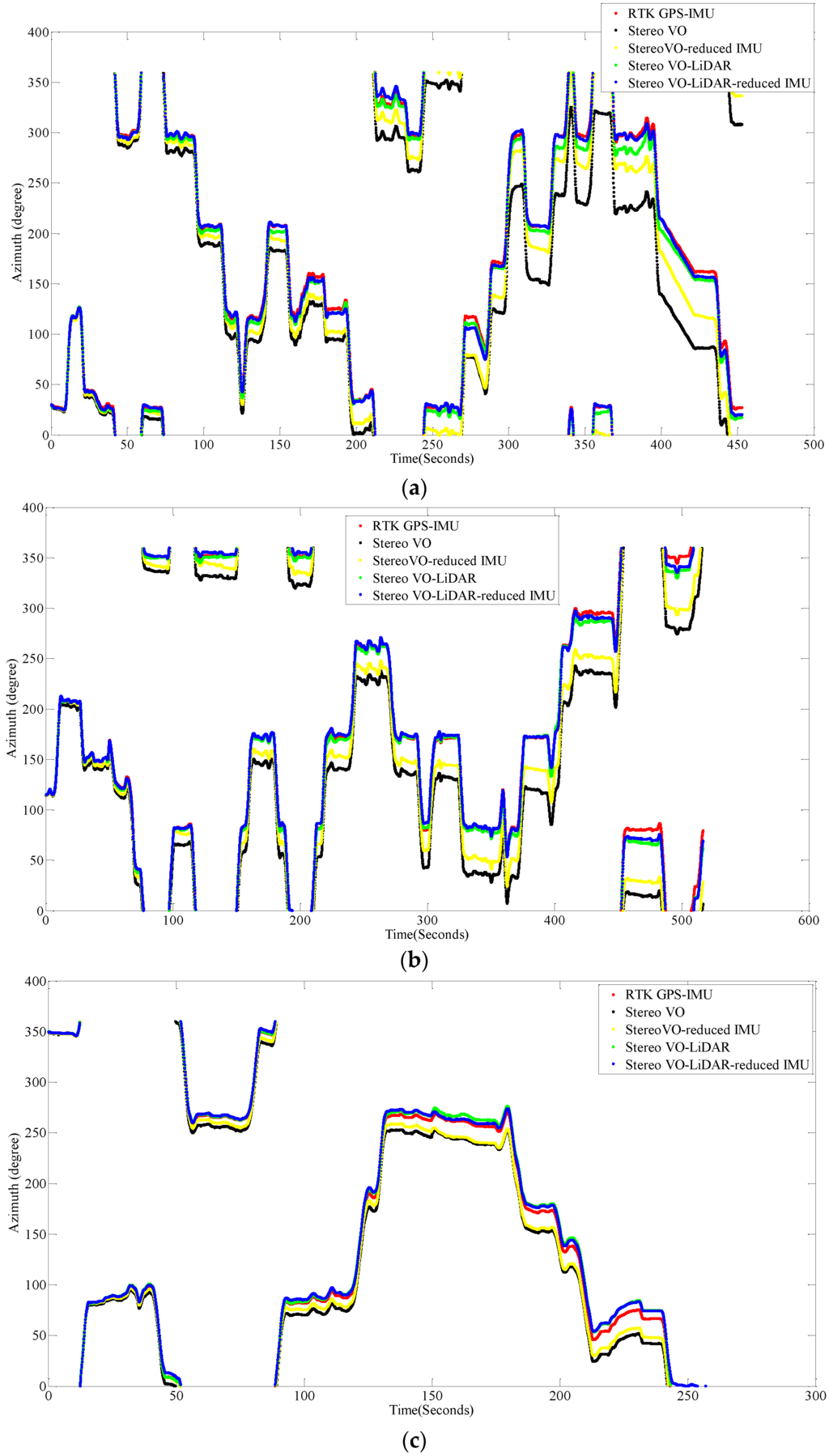
4.3. نتایج و تجزیه و تحلیل یکپارچه سازی حسگر












5. نتیجه گیری ها
منابع
- میلا، ا. Siegwart، R. تخمین حرکت خود مبتنی بر استریو با استفاده از ردیابی پیکسل و نزدیکترین نقطه تکراری. در مجموعه مقالات کنفرانس بین المللی IEEE در سیستم های بینایی کامپیوتری، نیویورک، نیویورک، ایالات متحده آمریکا، 4 تا 7 ژانویه 2006. پ. 21.
- هونگ، اس. کو، اچ. Kim, J. VICP: الگوریتم نزدیکترین نقطه تکراری به روز رسانی سرعت. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2010 در مورد رباتیک و اتوماسیون، انکوریج، AK، ایالات متحده آمریکا، 3-7 مه 2010. صفحات 1893-1898.
- هونگ، اس. کو، اچ. Kim, J. بهبود ردیابی حرکت با بهروزرسانی سرعت و تصحیح اعوجاج از دادههای اسکن لیزری مسطح. در مجموعه مقالات کنفرانس بینالمللی واقعیت مصنوعی و تلفیق، 1-3 دسامبر 2008. صص 315-318.
- ژانگ، جی. سینگ، اس. کیلومتر شماری و نقشه برداری Visual-lidar: کم رانش، قوی و سریع. در مجموعه مقالات کنفرانس بین المللی IEEE 2015 در مورد رباتیک و اتوماسیون (ICRA)، سیاتل، WA، ایالات متحده آمریکا، 26-30 مه 2015. صص 2174–2181.
- نورالدین، ا. کرامت، سل؛ جورجی، جی. مبانی ناوبری اینرسی، موقعیت یابی مبتنی بر ماهواره و ادغام آنها . Springer: برلین، آلمان، 2013. [ Google Scholar ]
- کیت، بی. گایگر، ا. Lategahn, H. اودومتری بصری بر اساس توالی تصویر استریو با طرح رد پرت مبتنی بر RANSAC. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2010، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 21 تا 24 ژوئن 2010. ص 486-492.
- اسکاراموزا، دی. Fraundorfer, F. Tutorial: Visual odometry. ربات IEEE. خودکار Mag. 2011 ، 18 ، 80-92. [ Google Scholar ] [ CrossRef ]
- Steffen, R. Visual SLAM از توالی های تصویری بدست آمده توسط وسایل نقلیه هوایی بدون سرنشین. دکتری پایان نامه، دانشگاه بن، بن، آلمان، 2009. [ Google Scholar ]
- Weiss, S. Visual SLAM in Pieces ; ETH Zurich: زوریخ، سوئیس، 2009. [ Google Scholar ]
- حسینی علمداری، س. یلماز، الف. تخمین میدان بردار حرکت با استفاده از فرض ثبات روشنایی و محدودیت هندسه اپی قطبی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، II–1 ، 9–16. [ Google Scholar ] [ CrossRef ]
- سرورود، YB; گائو، ی. تجزیه و تحلیل و کاهش هم ترازی دید استریو و خطاهای سرعت برای ناوبری دید. در مجموعه مقالات بیست و هفتمین نشست فنی بین المللی بخش ماهواره ای موسسه ناوبری، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 27 تا 29 ژانویه 2014. صص 3254–3262.
- هولز، دی. Ichim، AE; تومبری، ف. Rusu، RB; Behnke, S. ثبت با کتابخانه نقطه ای ابری PCL یک چارچوب مدولار برای تراز کردن ابرهای نقطه سه بعدی. ربات IEEE. خودکار Mag. 2015 ، 22 ، 110-124. [ Google Scholar ] [ CrossRef ]
- بیبر، پ. Strasser, W. تبدیل توزیعهای نرمال: رویکردی جدید برای تطبیق اسکن لیزری. IEEE Int. Conf. هوشمند ربات. سیستم 2003 ، 3 ، 2743-2748. [ Google Scholar ]
- پایین، K. بهینه سازی حداقل مربعات خطی برای ثبت سطح ICP نقطه به صفحه . دانشگاه کارولینای شمالی در چپل هیل: چپل هیل، NC، ایالات متحده آمریکا، 2004. [ Google Scholar ]
- سگال، ا. هانل، دی. Thrun، S. Generalized-ICP. ربات. علمی سیستم 2009 ، 5 ، 168-176. [ Google Scholar ]
- سیرتکایا، اس. سیمن، بی. آلاتان، A. فیلتر کالمن با جفت آزاد برای ادغام Odometry بصری و ناوبری اینرسی. در مجموعه مقالات شانزدهمین کنفرانس بین المللی ادغام اطلاعات (FUSION) در سال 2013، استانبول، ترکیه، 9 تا 12 ژوئیه 2013. صص 219-226.
- کورک، پی. لوبو، جی. دیاس، جی. مقدمه ای بر حس اینرسی و بصری. بین المللی جی راب. Res. 2007 ، 26 ، 519-535. [ Google Scholar ] [ CrossRef ]
- کیان، جی. چلاپا، ر. ژنگ، Q. ساختار قوی از تخمین حرکت با استفاده از داده های اینرسی. ج. انتخاب Soc. صبح. A 2001 , 18 , 2982. [ Google Scholar ] [ CrossRef ]
- کلاینرت، ام. Schleith، S. SLAM تک چشمی با کمک اینرسی برای ناوبری بدون GPS. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد همجوشی و ادغام چند حسگر برای سیستم های هوشمند (MFI)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 5-7 سپتامبر 2010. ص 20-25.
- نوتزی، جی. ویس، اس. اسکاراموزا، دی. Siegwart، R. ادغام IMU و چشم انداز برای تخمین مقیاس مطلق در SLAM تک چشمی. جی. اینتل. ربات. سیستم تئوری کاربردی 2011 ، 61 ، 287-299. [ Google Scholar ] [ CrossRef ]
- اشمید، ک. Hirschmuller، H. Stereo vision و IMU بر اساس زمان واقعی خود حرکت و محاسبه تصویر عمق بر روی یک دستگاه دستی. در مجموعه مقالات کنفرانس بین المللی IEEE 2013 در مورد رباتیک و اتوماسیون (ICRA)، کارلسروهه، آلمان، 6 تا 10 مه 2013. صص 4671-4678.
- کونولیج، ک. آگراوال، م. سولا، جی. کیلومتر شماری بصری در مقیاس بزرگ برای زمین های ناهموار. Proc. بین المللی علائم ربات. Res. 2007 ، 2 ، 1150-1157. [ Google Scholar ]
- Tardif، JP; جورج، م. لاورن، ام. کلی، ا. Stentz، A. یک رویکرد جدید برای ناوبری اینرسی با کمک دید. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2010 در مورد ربات ها و سیستم های هوشمند (IROS)، تایپه، تایوان، 18 تا 22 اکتبر 2010. صص 4161–4168.
- Strelow، D. تخمین حرکت از تصویر و اندازهگیریهای اینرسی. بین المللی جی راب. Res. 2004 ، 23 ، 1157-1195. [ Google Scholar ] [ CrossRef ]
- شرر، اس. رهدر، جی. آچار، س. جلد، اچ. چمبرز، آ. نوسکه، اس. سینگ، اس. نقشه برداری رودخانه از یک ربات پرنده: تخمین حالت، تشخیص رودخانه و نقشه برداری موانع. Auton. Robots 2012 , 33 , 189-214. [ Google Scholar ] [ CrossRef ]
- جکلی، سی. سیستمهای ناوبری اینرسی با کاربردهای ژئودتیک . DE GRUYTER: برلین، آلمان، 2001. [ Google Scholar ]
- Szeliski، R. بینایی کامپیوتر: الگوریتم ها و برنامه ها. کامپیوتر (Long. Beach. Calif). 2010 ، 5 ، 832. [ Google Scholar ]
- گایگر، ا. لنز، پی. استیلر، سی. Urtasun, R. Vision ملاقات با روباتیک: مجموعه داده KITTI. بین المللی جی راب. Res. 2013 ، 32 ، 1231-1237. [ Google Scholar ] [ CrossRef ]
- گایگر، ا. موسمن، اف. ماشین، O. شوستر، ب. کالیبراسیون خودکار دوربین و سنسور برد با استفاده از یک شات. در مجموعه مقالات کنفرانس بین المللی IEEE 2012 در مورد رباتیک و اتوماسیون (ICRA)، سنت پل، MN، ایالات متحده آمریکا، 14-18 مه 2012. صص 3936-3943.
- حسینی علمداری، س. بالازادگان، ی. Toth, C. ردیابی اجسام متحرک سه بعدی بر اساس راه حل ناوبری GPS/IMU، ابر نقطه اسکنر لیزری و داده های GIS. ISPRS Int. J. Geo-Inform. 2015 ، 4 ، 1301-1316. [ Google Scholar ] [ CrossRef ]
- Meng, Y. بهبود موقعیت وسیله نقلیه زمینی با استفاده از نقشه دیجیتال و سایر اطلاعات جانبی. دکتری پایان نامه، دانشگاه پلی تکنیک هنگ کنگ، هنگ کنگ، 2006. [ Google Scholar ]
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر