1. معرفی
اخیراً، سیستمهای تشخیص حرکات برای محققان در زمینه رابطهای انسان و رایانه به طور فزایندهای جالب شدهاند. به طور خاص، وعده سیستمهای تشخیص حرکات بدون دستگاه، فریبندهای است که محققان را به این فناوری جدید و امیدوارکننده جذب میکند. ساختن سیستمهای تعاملی مبتنی بر سیگنالهای بیسیم (مانند وایفای در همه جا) که نیازی به نصب دوربین یا سنسور ندارد، صنعت محاسبات و تولید دستگاههای هوشمند را برای همیشه تغییر میدهد: برای مثال، هنگام تولید تلویزیون تعاملی هوشمند، تولیدکنندگان نیازی به تجهیز تلویزیون ندارند. با حسگرهای گران قیمت یا فناوری های مبتنی بر بینایی؛ در عوض، آنها میتوانند از فناوری تشخیص حرکت بدون دستگاه استفاده کنند. از این رو،
سیستمهای تشخیص حرکات سنتی به فناوری بینایی مانند مایکروسافت کینکت [ 1 ] یا حسگرهای پوشیدنی مانند حلقههای جادویی [ 2 ] بستگی دارند. برای آینده، محققان در تلاش هستند تا چنین حسگرهایی را حذف کنند و مستقیماً به سمت فناوری امیدوارکننده سیستمهای حسگر بدون دستگاه حرکت کنند. سیستمهای بدون دستگاه این نام را به این دلیل دادهاند که شیء درکشده توسط رایانه به دوربین یا حسگر در ناحیه سنجش یا روی شی درکشده نیاز ندارد. رویکردهای قبلی نشان میدهد که تجزیه و تحلیل سیگنال WiFi میتواند از بومیسازی انسان در محیطهای داخلی، هم در هنگام دید (LOS) و هم غیرخط دید (NLOS)، مانند از طریق دیوارها و پشت درهای بسته، پشتیبانی کند. سیگنال های وای فای همچنین می توانند برای شناسایی تعداد افراد در یک اتاق به همراه مکان آنها استفاده شوند [3 ]. برخی از رویکردهای قبلی برای استفاده از تجزیه و تحلیل سیگنالهای WiFi برای سیستمهای تشخیص حرکات دست گسترش یافتهاند، که انسان را قادر میسازد تا بدون نیاز به حسگرها یا فناوری مبتنی بر بینایی با دستگاهها ارتباط برقرار کند [4 ] . با این حال، سیستمهای تشخیص ژست مبتنی بر WiFi هنوز فاقد امنیت هستند و هنوز در قابلیتهای حسی خود از طریق دیوارهای متعدد محدود هستند.
در این مقاله، ما یک سیستم تشخیص حرکت دست بدون دستگاه را ارائه میکنیم که انسان را قادر میسازد تا با دستگاههای خانگی تعامل داشته باشد و همچنین امنیت کاربر و مکانیسمهای انتخاب دستگاه را فراهم میکند. ما از اطلاعات وضعیت کانال (CSI) سیگنال های بی سیم به عنوان معیاری برای سیستم خود استفاده می کنیم. مکانیسمهای حسگر مبتنی بر WiFi قبلی از قدرت سیگنال دریافتی (RSS) از لایه MAC بیسیم برای ردیابی حرکت انسان استفاده میکردند. با این حال، مقدار RSS با افزایش فاصله کاهش مییابد و از محو شدن چند مسیری در محیطهای پیچیده رنج میبرد. علاوه بر این، RSS از سیگنال های WiFi در هر بسته اندازه گیری می شود. بنابراین، RSS تک ارزشی است. در مقابل، لایه فیزیکی CSI نسبت به تغییرات محیطی قویتر است و در سطح زیرحامل تقسیم فرکانس متعامد (OFDM) از بسته دریافتی اندازهگیری میشود [ 5] .]. بنابراین، ما از CSI برای ایجاد یک سیستم پایدارتر و قوی تر استفاده می کنیم.
به طور کلی، رویکردهای قبلی تشخیص ژست مبتنی بر WiFi از یک پنجره متحرک استفاده میکردند و چندین ویژگی را از حوزههای زمان و فرکانس سیگنالهای WiFi استخراج میکردند – مانند میانه، انحراف استاندارد، لحظه مرکزی دوم، حداقل میانگین مربع، آنتروپی، بین ربع، انرژی سیگنال ، و غیره. به طور تجربی، متوجه میشویم که برخی از حرکات، مقادیری شبیه به ویژگیهای دیگر تولید میکنند که میتوانند نرخ تشخیص نادرست را، بهویژه در سناریوهای دیواری، افزایش دهند. افزایش تعداد ویژگی ها نیز دقت را افزایش می دهد اما سرعت سیستم را محدود می کند. بنابراین، سیستم ما چنین ویژگی هایی را استخراج نمی کند. در عوض، ما یک روش تقسیم بندی کارآمد بر اساس تحلیل موجک و انرژی کوتاه مدت (STE) طراحی می کنیم. الگوریتم موجک الگوی منحصر به فرد مرتبط با هر حرکت را نشان می دهد و الگوریتم STE به صورت پویا مدت زمان هر حرکت را در سری زمانی سیگنال تشخیص می دهد. بنابراین، سیستم ما این الگوها را به عنوان ویژگی های هر ژست انتخاب می کند. شایان ذکر است که هر الگوی شناسایی شده توسط سیستم ما اکثر اجزای حوزه فرکانس و حوزه زمان را حفظ می کند. بنابراین، روش انتخاب ویژگی ما حتی ویژگیهای بیشتری را نسبت به رویکردهای قبلی در نظر میگیرد، که عمدتاً تعداد کمی از ویژگیها را انتخاب میکنند که ممکن است برای حرکات کوچک مانند ژست دست کافی نباشد. پس از آن، ما یک الگوریتم تاب خوردگی زمانی پویا (DTW) را برای مقایسه الگوهای ژستها و تمایز بین ژستها اتخاذ میکنیم، زیرا هر الگوی ژست دهها نقطه دارد.
در ایجاد یک سیستم تشخیص حرکت بدون دستگاه، با سه چالش اصلی روبرو هستیم. اولین چالش، مشکل نحوه طبقه بندی حرکات از طریق دیوارهای متعدد است. از رویکردهای قبلی، متوجه شدیم که سیستمهای طبقهبندی ژست مبتنی بر CSI هنوز قابلیتهای سنجش از طریق دیواره محدودی دارند. ما این مشکل را با ایجاد یک روش تقسیمبندی کارآمد و الگوریتم طبقهبندی سریع که میتواند تنها با استفاده از یک روتر WiFi در همه جا حاضر، مانند TP-LINK TL-WR842N، حرکات را از طریق یک دیوار به دقت تشخیص دهد، حل میکنیم. سپس، برای گسترش تشخیص حرکت دست به سناریوهایی که کاربر توسط چندین دیوار از گیرنده جدا میشود، سختافزار فرستنده (روتر WiFi) را با نصب آنتنهایی با توان عملیاتی بالا به جای آنتنهای اصلی روتر اصلاح میکنیم. چالش دوم این است که چگونه می توان امنیت را به سیستم تشخیص حرکت بدون دستگاه اضافه کرد. افزودن امنیت یک مشکل اساسی و یک عامل محدود کننده در اکثر رویکردهای قبلی است که در صورت حذف آن، منجر به یک سیستم ناامن می شود. به عنوان مثال، بدون امنیت داخلی، همسایه ای که دست خود را حرکت می دهد می تواند دستگاه های همسایه نزدیک خود را کنترل کند. چالش سوم اجتناب از تعاملات تصادفی کاربر و دستگاههایی است که از طریق سیستم تشخیص حرکت مبتنی بر WiFi (WiGeR) کار میکنند. این نیز یک مسئله حیاتی است که پتانسیل ایجاد هرج و مرج در رابط های انسان و کامپیوتر را دارد. به عنوان مثال، اگر کاربر دست خود را به سمت چپ بکشد و تلویزیون او کانال را تغییر دهد، لپتاپ او به صفحه بعدی سوایپ کند و تهویه هوا تنظیم دما را افزایش دهد، نتیجه هرج و مرج خواهد بود. بدیهی است که چنین سناریویی شامل پاسخ نامناسب سیستم است. برای حل چالشهای دوم و سوم، سیستم ما از کاربر میخواهد یک حرکت منحصربهفرد را انجام دهد که سیستم میتواند آن را شناسایی کند و به عنوان شناسه یا اشاره مجاز آن کاربر رفتار کند. پس از اینکه یک حرکت به عنوان یک اشاره کاربر مجاز تشخیص داده شد، WiGeR کاربر را قادر می سازد تا تعامل با دستگاه ها را آغاز کند. علاوه بر این، هر دستگاه همچنین به کاربر نیاز دارد تا یک حرکت منحصر به فرد را انجام دهد که می تواند به عنوان یک حرکت انتخاب دستگاه در نظر گرفته شود. هنگامی که WiGeR یک حرکت انتخاب دستگاه خاص را تشخیص میدهد، دستگاه متعاقباً به سایر حرکات تعامل کاربر پاسخ میدهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد. سیستم ما از کاربر میخواهد یک حرکت منحصربهفرد را انجام دهد که سیستم بتواند آن را به عنوان شناسه یا اشاره مجاز آن کاربر تشخیص دهد و با آن رفتار کند. پس از اینکه یک حرکت به عنوان یک اشاره کاربر مجاز تشخیص داده شد، WiGeR کاربر را قادر می سازد تا تعامل با دستگاه ها را آغاز کند. علاوه بر این، هر دستگاه همچنین به کاربر نیاز دارد تا یک حرکت منحصر به فرد را انجام دهد که می تواند به عنوان یک حرکت انتخاب دستگاه در نظر گرفته شود. هنگامی که WiGeR یک حرکت انتخاب دستگاه خاص را تشخیص میدهد، دستگاه متعاقباً به سایر حرکات تعامل کاربر پاسخ میدهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد. سیستم ما از کاربر میخواهد یک حرکت منحصربهفرد را انجام دهد که سیستم بتواند آن را به عنوان شناسه یا اشاره مجاز آن کاربر تشخیص دهد و با آن رفتار کند. پس از اینکه یک حرکت به عنوان یک اشاره کاربر مجاز تشخیص داده شد، WiGeR کاربر را قادر می سازد تا تعامل با دستگاه ها را آغاز کند. علاوه بر این، هر دستگاه همچنین به کاربر نیاز دارد تا یک حرکت منحصر به فرد را انجام دهد که می تواند به عنوان یک حرکت انتخاب دستگاه در نظر گرفته شود. هنگامی که WiGeR یک حرکت انتخاب دستگاه خاص را تشخیص میدهد، دستگاه متعاقباً به سایر حرکات تعامل کاربر پاسخ میدهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد. پس از اینکه یک حرکت به عنوان یک اشاره کاربر مجاز تشخیص داده شد، WiGeR کاربر را قادر می سازد تا تعامل با دستگاه ها را آغاز کند. علاوه بر این، هر دستگاه همچنین به کاربر نیاز دارد تا یک حرکت منحصر به فرد را انجام دهد که می تواند به عنوان یک حرکت انتخاب دستگاه در نظر گرفته شود. هنگامی که WiGeR یک حرکت انتخاب دستگاه خاص را تشخیص میدهد، دستگاه متعاقباً به سایر حرکات تعامل کاربر پاسخ میدهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد. پس از اینکه یک حرکت به عنوان یک اشاره کاربر مجاز تشخیص داده شد، WiGeR کاربر را قادر می سازد تا تعامل با دستگاه ها را آغاز کند. علاوه بر این، هر دستگاه همچنین به کاربر نیاز دارد تا یک حرکت منحصر به فرد را انجام دهد که می تواند به عنوان یک حرکت انتخاب دستگاه در نظر گرفته شود. هنگامی که WiGeR یک حرکت انتخاب دستگاه خاص را تشخیص میدهد، دستگاه متعاقباً به سایر حرکات تعامل کاربر پاسخ میدهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد. دستگاه متعاقباً به سایر حرکات تعاملی کاربر پاسخ می دهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد. دستگاه متعاقباً به سایر حرکات تعاملی کاربر پاسخ می دهد. این راه حل ساده بر اساس الگوریتم های تقسیم بندی و طبقه بندی الگوی جدید و کارآمد است. حرکات را می توان از طریق یادگیری توسط کاربران و دستگاه ها تغییر داد.
در این مقاله، مشارکت های اصلی ما به شرح زیر است:
-
ما یک سیستم تشخیص ژست را ارائه میدهیم که انسان را قادر میسازد تا با دستگاههای متصل به وایفای در کل خانه تعامل داشته باشد، با استفاده از هفت حرکت دست به عنوان حرکات تعاملی، سه حرکت دست کشیده شده در هوا که در طرح امنیتی بهعنوان حرکات تأیید شده کاربران عمل میکند، و سه حرکت اضافی دیگر. حرکات دستی که با هوا کشیده می شوند و به عنوان حرکات انتخاب دستگاه عمل می کنند. برخلاف سیستمهای تشخیص حرکت قبلی مبتنی بر WiFi، سیستم ما میتواند در سناریوهای مختلف حتی از طریق دیوارهای متعدد کار کند. علاوه بر این، سیستم ما اولین سیستم تشخیص حرکت بدون دستگاه است که امنیت را برای کاربران و دستگاهها فراهم میکند.
-
ما یک روش تقسیم بندی جدید بر اساس تجزیه و تحلیل موجک و انرژی کوتاه مدت (STE) طراحی می کنیم. الگوریتم جدید ما بخشهای CSI را قطع میکند و تغییرات در CSI ناشی از حرکات دست را تجزیه و تحلیل میکند و الگوهای منحصر به فرد حرکات را آشکار میکند. علاوه بر این، الگوریتم می تواند شروع و پایان ژست (مدت زمان) را تعیین کند.
-
ما یک روش طبقهبندی مبتنی بر تاب خوردگی زمان پویا برای طبقهبندی تمام حرکات دست پیشنهادی طراحی میکنیم. الگوریتم طبقه بندی ما در سناریوهای مختلف به دقت بالایی دست می یابد.
-
ما آزمایش های جامع انجام می دهیم. هر ژست چندین صد بار آزمایش شده است. آزمایشها بینشهای مهمی را در اختیار ما قرار میدهند و توانایی طبقهبندی سیستممان را بهبود میبخشند و به ما اجازه میدهند بهترین پارامترها را انتخاب کنیم – که از طریق تجربه به دست آمدهاند – تا نمایه دستهبندی یادگیری حرکتی بسازیم که میتواند ژستها را با اشکال فیزیکی مختلف کاربران در موقعیتهای مختلف مدیریت کند.
ادامه این مقاله به شرح زیر سازماندهی شده است. بخش 2 مروری بر برخی از آثار مرتبط ارائه می دهد. بخش 3 معماری سیستم را ارائه می کند. بخش 4 روش شناسی را تشریح می کند. بخش 5 تنظیمات آزمایشی و نتایج را مورد بحث قرار می دهد. بخش 6 این مقاله را به پایان می رساند و پیشنهاداتی را برای تحقیقات آتی ارائه می دهد.
2. آثار مرتبط
2.1. سیستم های تشخیص حرکت مبتنی بر دستگاه
سیستمهای تشخیص حرکات تجاری از فناوریهای مختلفی برای شناسایی طیف گستردهای از ژستها استفاده میکنند. این فناوریها شامل دوربینها و بینایی کامپیوتر و حسگرهای مبتنی بر اتاق یا داخلی مانند دوربینها [ 6 ]، PointGrab [ 7 ]، لپتاپها [ 8 ]، تلفنهای هوشمند [ 9 ، 10 ]، GPS [ 11 ]، مبتنی بر بینایی [ 12] هستند. ]، و شتابسنجها [ 13 ، 14 ]، و همچنین حسگرهایی که بر روی بدن انسان پوشیده میشوند – مانند حلقهها [ 15 ]، بازوبند [ 16 ] و مچبند [ 17 ، 18 ].
با این حال، آنها معایبی دارند. به عنوان مثال، سیستم های مبتنی بر بینایی نیاز به یک خط دید بین کاربر و دستگاه دوربین دارند. سنسورهای داخلی نیاز به نصب سنسورهای ویژه دارند. و البته، ابزارهای پوشیدنی باید توسط کاربر پوشیده شوند، که ممکن است ناراحت کننده باشد. علاوه بر این، هیچ یک از این سیستم ها رایگان نیستند. در مقابل، سیستم ما با دستگاه های متصل به وای فای بدون هیچ دستگاه خاصی تعامل دارد و تقریباً هیچ هزینه ای ندارد.
2.2. سیستم های تشخیص حرکت بدون دستگاه
کارهای موجود بر روی سیستم های حسگر مبتنی بر بی سیم بدون دستگاه را می توان به سه گرایش اصلی دسته بندی کرد: (1) سیستم های مبتنی بر قدرت سیگنال دریافتی (RSS). (2) سیستم های مبتنی بر فرکانس رادیویی (RF) که گاهی اوقات رادیو تعریف شده نرم افزاری (SDR) نامیده می شود. و (3) سیستم های مبتنی بر اطلاعات وضعیت کانال (CSI). در اینجا، برخی از رویکردهای قبلی را برای تشریح آخرین پیشرفتها در این حوزه تحقیقاتی مرور میکنیم.
2.2.1. RSS
عبدالناصر و همکاران [ 19 ] یک سیستم تشخیص حرکات مبتنی بر WiFi (WiGest) را با اعمال تغییرات در RSS به دلیل حرکات دست پیشنهاد کرد. سیستم WiGest می تواند چندین حرکت دست را شناسایی کرده و آنها را به دستورات برای کنترل اقدامات مختلف برنامه ها ترسیم کند. WiGest با استفاده از یک نقطه دسترسی واحد و سه نقطه دسترسی بالای سر، به نرخ دقت تشخیص حرکت 87.5٪ و 96٪ دست یافت. با این وجود، RSSI یک معیار ناکافی است زیرا تغییرات شدید در مقادیر RSSI باعث تشخیص نادرست مداوم می شود. علاوه بر این، WiGest و سایر سیستمهای تشخیص حرکت مبتنی بر RSS هنوز امنیت ندارند و نمیتوانند از طریق دیوارها کار کنند.
2.2.2. SDR
اخیراً، سیستمهای سنجش بدون دستگاه مختلفی پیشنهاد شدهاند که از رادیو تعریفشده نرمافزار با دستگاههایی مانند یونیورسال نرمافزار رادیویی جانبی (USRP) و خوانندگان شناسایی فرکانس رادیویی (RFID) استفاده میکنند. پو و همکاران [ 4 ] سیستم WiSee را ارائه کرد که میتواند 9 حرکت بدن را برای تعامل با دستگاههای متصل به Wi-Fi خانگی با استفاده از تغییر داپلر سیگنالهای بیسیم تشخیص دهد. ادیب و همکاران WiVi [ 3 ]، Witrack [ 20 ] و WiTrack02 [ 21 ] را ارائه کرد. این سیستم ها می توانند حرکت انسان را از طریق دیوارها ردیابی کنند و حرکات ساده دست را طبقه بندی کنند. وانگ و همکاران [ 22] سیستم RF-IDraw را ارائه کرد که برای خوانندگان RFID تجاری طراحی شده بود. RF-IDraw یک صفحه نمایش لمسی مجازی را فعال می کند و به کاربر اجازه می دهد از طریق حرکات دست با دستگاه تعامل داشته باشد. کلوگ و همکاران [ 23 ] سیستم AllSee را طراحی کرد که می تواند ژست های انسان را با استفاده از تگ های RFID و حسگرهای برداشت نیرو شناسایی کند، اما AllSee نمی تواند با سیگنال های WiFi کار کند. فقط با انتقال تلویزیون و RFID کار می کند.
همه این سیستمهای مبتنی بر SDR به دستگاههای خاصی نیاز دارند که هزینههای آن بالا و نصب آنها سنگین است. در مقابل، سیستم ما فقط به یک نقطه دسترسی (روتر Wi-Fi) نیاز دارد که اکنون تقریباً در همه جا در دسترس است. علاوه بر این، سیستم های مبتنی بر SDR از کمبود امنیت رنج می برند. در مقابل، سیستم ما از امنیت هم برای کاربران و هم برای دستگاه ها پشتیبانی می کند.
2.2.3. CSI
سیستمهای حسگر مبتنی بر اطلاعات وضعیت کانال برای اهداف مختلفی مانند محلیسازی [ 24 ]، تشخیص حرکت انسان [ 25 ] و شمارش انسان [ 26 ] طراحی شدهاند. اخیراً، CSI برای تشخیص حرکات انسان مانند تشخیص سقوط [ 27 ]، تشخیص فعالیت روزانه [ 28 ]، تشخیص میکرو حرکت [ 29] و تشخیص ژست [30،31 ] گسترش یافته است . نانداکومار و همکاران [ 30 ] یک سیستم تشخیص حرکات دست ارائه کرد که می تواند چهار حرکت دست را با دقت 91% و 89% در LOS و در کوله پشتی شناسایی کند. او و همکاران[ 31 ] یک سیستم تشخیص ژست دست به نام WiG ارائه کرد. WiG چهار حرکت دست را در LOS و NLOS به ترتیب با دقت 92% و 88% طبقه بندی می کند. در مقایسه با سیستمهای مبتنی بر SDR، سیستمهای قبلی تشخیص ژست مبتنی بر CSI، حرکات دست کمتر و سادهتری را پیشنهاد کردهاند. در مقابل، سیستم ما برای استفاده در کل خانه طراحی شده است و قادر به کنترل چندین دستگاه با قابلیت تشخیص حرکات تعاملی کافی است.
به طور خلاصه، تمام سیستمهای تشخیص حرکات بدون دستگاه قبلی هنوز از مشکلات امنیتی رنج میبرند و هنوز توانایی تشخیص حرکات را از طریق دیوارهای متعدد ندارند. در این مقاله، سیستم WiGeR را ارائه میکنیم که بر این محدودیتها غلبه کرده و از سیستمهای تشخیص حرکت بدون دستگاه قبلی بهتر عمل میکند.
3. نمای کلی سیستم
3.1. نمای کلی حرکات
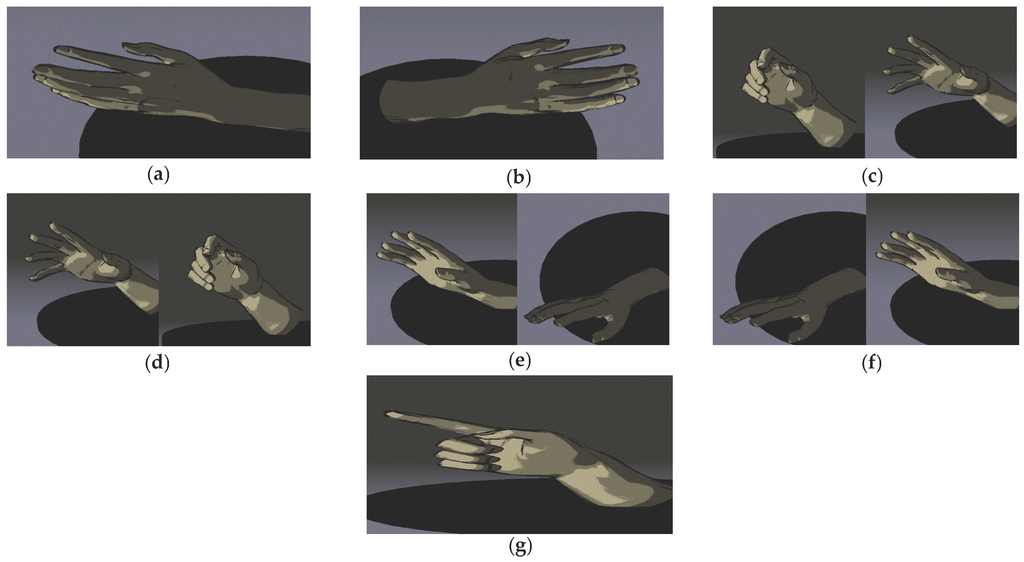
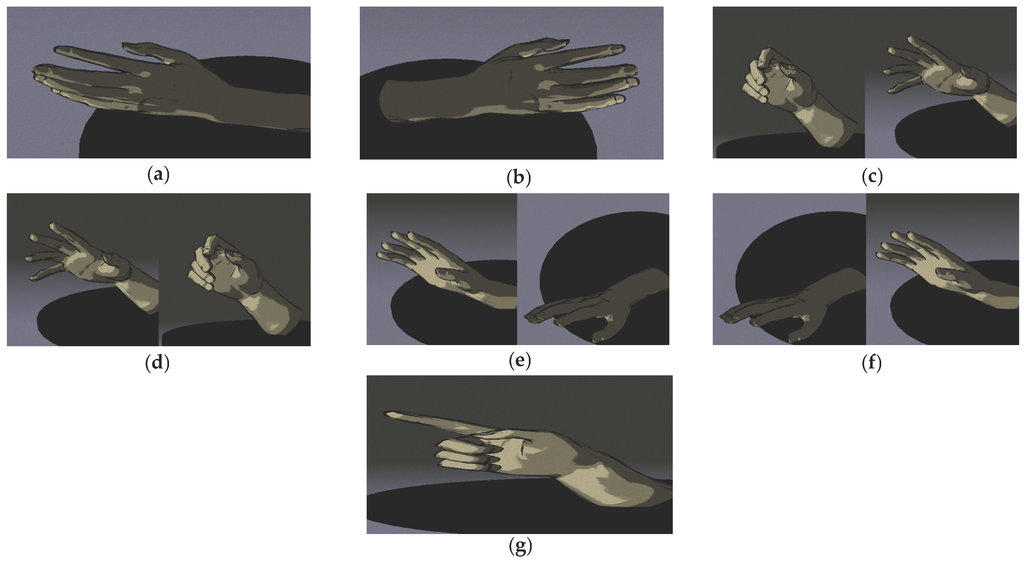
ما یک سیستم جدید طراحی میکنیم که به انسان امکان میدهد پیامها را بهصورت بیسیم به دستگاهها ارسال کند، بدون اینکه نیازی به حمل یا پوشیدن دستگاه بیسیم یا حسگر برای اجرای فرمان یا ارسال پیام به دستگاهی که میخواهد با آن ارتباط برقرار کند. همانطور که در شکل 1 نشان داده شده است، سیستم ما هفت حرکت دست را برای کنترل دستگاه ها تشخیص می دهد .
این هفت ژست را می توان برای کنترل چندین دستگاه با عملکردهای مختلف تنظیم کرد. جدول 1 وظایفی را که این حرکات می توانند انجام دهند فهرست می کند.
به عنوان یک روش تشخیص منحصر به فرد، کاربران ملزم به انجام برخی حرکت های منحصر به فرد برای مجوز هستند. از سه کاربر خواستیم تا با کشیدن اشکال خاص در هوا، سه ژست مختلف را انجام دهند. در اینجا، ما سه شکل را که در شکل 2 a-c توضیح داده شده است، پیشنهاد می کنیم. WiGeR می تواند یک کاربر را با طبقه بندی ژست پیاده سازی شده شناسایی و احراز هویت کند. متعاقباً، آن کاربر می تواند با دستگاه مورد نظر تعامل داشته باشد. هر دستگاه هدف نیز یک ژست خاص دارد. از کاربر خواسته می شود که ژست کشیدن در هوا را اجرا کند تا بتواند دستگاه مورد نظر را برای تعامل انتخاب کند. همانطور که در شکل 2 نشان داده شده است، سه شکل برای ترسیم در هوا پیشنهاد می کنیمd-f. اگر WiGeR حرکات انجام شده را به عنوان یک حرکت خاص دستگاه طبقه بندی کند، دستگاه می تواند به دستورات بعدی آن کاربر پاسخ دهد. این راه حل از سیستم تعاملی ما محافظت می کند و از نفوذ خارجی و تعامل ناخواسته تصادفی کاربر و دستگاه جلوگیری می کند.
3.2. معماری سیستم
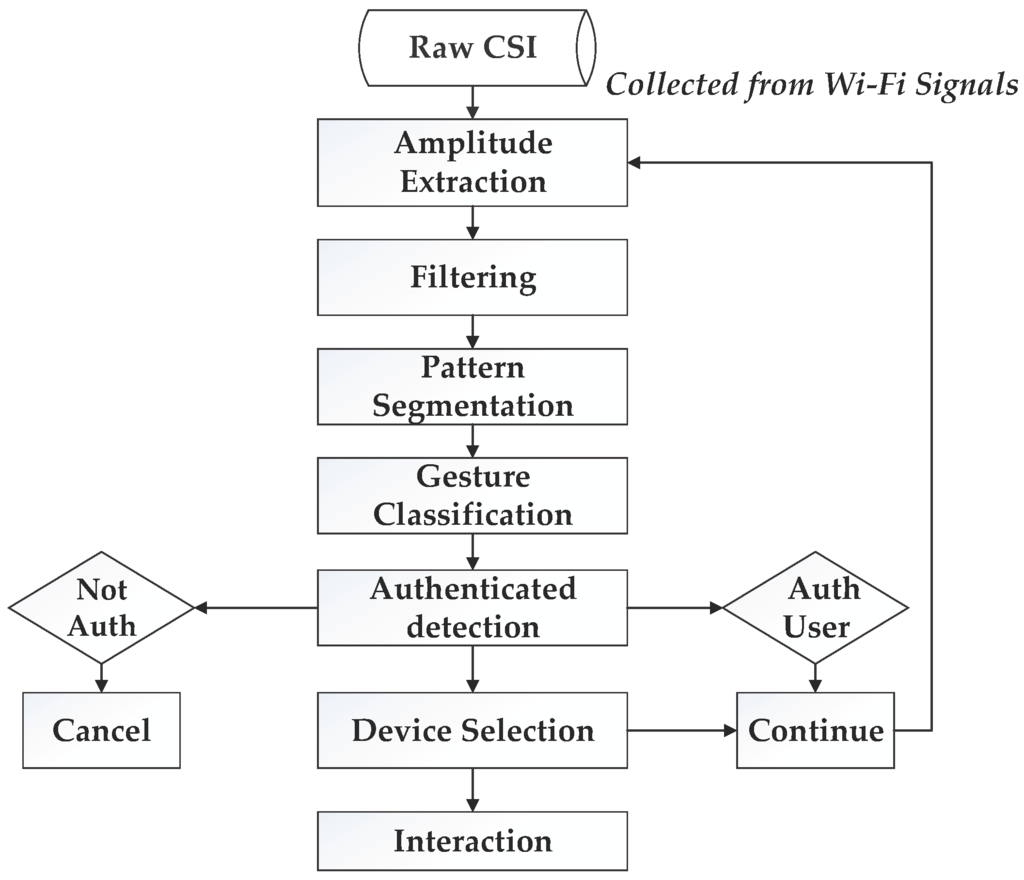
سیستم ما شامل مراحل زیر است:
-
آماده سازی: در این مرحله، WiGeR اطلاعات را از نقطه دسترسی WiFi جمع آوری می کند، اطلاعات دامنه را استخراج می کند و سپس نویز را فیلتر می کند.
-
تقسیم بندی الگو: در این مرحله، سیستم بین ژست ها تفاوت قائل می شود. ما یک الگوریتم تجزیه موجک چند سطحی و الگوریتم انرژی کوتاه مدت را برای استخراج الگوهای ژست اعمال می کنیم و به ترتیب نقطه شروع و پایان یک حرکت را تشخیص می دهیم و عرض پنجره حرکت را تشخیص می دهیم.
-
طبقه بندی ژست: در این مرحله سیستم الگوهای هر پنجره ژست را با هم مقایسه می کند. الگوریتم DTW اعمال می شود و حرکات نامزد را به طور دقیق طبقه بندی می کند.
شکل 3 معماری WiGeR و گردش کار را نشان می دهد. در بخش 4 هر مرحله را به تفصیل توضیح خواهیم داد.
4. روش شناسی
4.1. آماده سازی
اطلاعات وضعیت کانال نحوه انتشار سیگنال ها از فرستنده به گیرنده در یک سیستم ارتباطی بی سیم را نشان می دهد و ویژگی های کانال را با اطلاعات دامنه و فاز هر فرعی نشان می دهد. فرض کنید H نشانگر اطلاعات وضعیت کانال باشد و T و R به ترتیب فرستنده و گیرنده را بیان کنند. رابطه بین CSI، فرستنده و گیرنده را می توان به صورت معادله (1) بیان کرد:
جایی که N نویز است. یک کانال وای فای در باند 2.4 گیگاهرتز را می توان به عنوان یک کانال باریک محو مسطح در نظر گرفت، که می تواند همانطور که در معادله (2) نشان داده شده است، تفسیر شود :
جایی که ∥اچمن ، ج(fک) ∥∥��,�(��)∥دامنه است، ∠اچمن ، ج(fک)∠��,�(��)فاز، i عدد جریان، و j عدد حامل فرعی است. در سیستم ما، به دلیل ناپایداری اطلاعات فاز، فقط از اطلاعات دامنه CSI استفاده می کنیم.
ما از یک روتر WiFi TP-Link که دارای دو آنتن به عنوان فرستنده یا نقطه دسترسی (AP) است و یک لپ تاپ Lenovo ThinkPad x201 مجهز به کارت شبکه Intel WiFi IWL 5300 به عنوان گیرنده یا نقطه تشخیص (DP) استفاده می کنیم. یعنی سیستم MIMO 2*3 داریم. بر اساس طرح OFDM، CSI به شش جریان تقسیم می شود و هر جریان دارای 30 فرعی است. بنابراین، 180 گروه داده را می توان از هر بسته دریافتی، همانطور که در رابطه (3) نشان داده شده است، استخراج کرد:
ما CSI را در 30 حامل فرعی در یک مقدار واحد جمع می کنیم اچمن��، جایی که i شماره جریان است. بنابراین، همانطور که در شکل 4 نشان داده شده است، شش جریان بدست می آوریم که می توانند مقادیر CSI را نشان دهند .
همانطور که در شکل 4 نشان داده شده است روند واقعی CSI در نویز غرق شده است. از این رو، ما یک فیلتر پایین گذر Butterworth طراحی می کنیم تا نویز را حذف کند اما روند واقعی CSI ناشی از حرکت دست را حفظ کند. همانطور که در شکل 4 ب نشان داده شده است، فیلتر ما به طور موثر تمام نویزها را حذف می کند.
4.2. تقسیم بندی الگو
اجسام متحرک مانند حرکات دست در محیط های آزمایشی با مدت زمانی برای تجزیه و تحلیل عملکرد ژست با فرکانس خام CSI مرتبط هستند. مدت زمان حرکات مختلف ممکن است یکسان باشد، اما دفعات هر حرکت متفاوت است. بنابراین، ما باید مولفه های فرکانس و زمان حرکات دست مختلف را در مدت زمان های مختلف استخراج کنیم تا برای هر حرکت دست یک الگوی منحصر به فرد به دست آوریم. برای این منظور، ما یک الگوریتم تقسیمبندی الگوی کارآمد بر اساس تحلیل موجک و انرژی زمان کوتاه طراحی میکنیم.
ابتدا، یک الگوریتم تجزیه موجک چند سطحی برای تجزیه CSI و تجزیه و تحلیل اجزای فرکانس و زمان آن برای به دست آوردن یک الگوی منحصر به فرد برای هر حرکت طراحی می کنیم. WiGeR مقدار میانگین شش جریان CSI را برای به دست آوردن یک بردار یک بعدی CSI که ورودی الگوریتم تحلیل موجک است، محاسبه می کند. سپس، تجزیه موجک 1 بعدی چند سطحی به شرح زیر اعمال می شود:
جایی که آj0ک��0�و βj k���به ترتیب ضرایب تقریبی و ضرایب تفصیلی هستند. ϕj0ک( سیاسمن)��0�(���)و ψj k( سیاسمن)���(���)تابع مقیاس بندی (موجک پدر) و تابع موجک (موجک مادر) نامیده می شوند. آj0ک��0�و βj k���را می توان به صورت محاسبه کرد
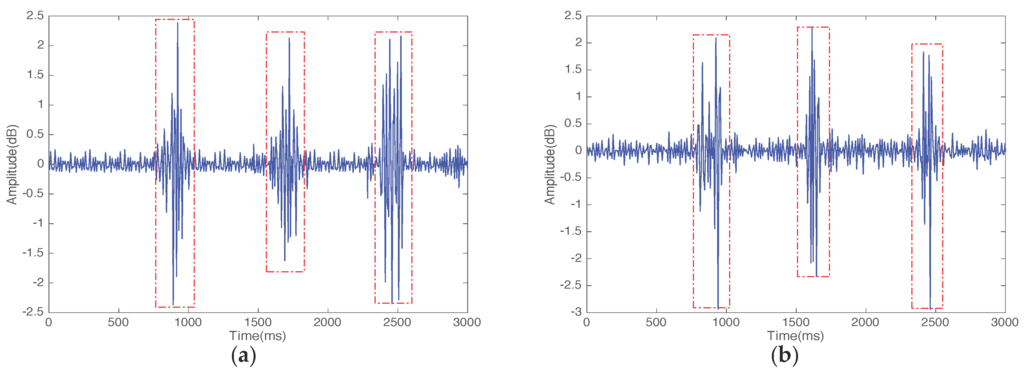
در اینجا، ما طبقه بندی کننده خود را با موجک Daubechies و موجک Symlets آزمایش می کنیم. متوجه می شویم که Symlets از مرتبه 4 ( s yمتر 4 )(���4)تا سطح 5 ( j = 5 )(�=5)بهترین دقت را به دست می آورد. بنابراین از Symlets ( sym4 ) به عنوان نوع موجک استفاده می کنیم و ضرایب تفصیلی سطح را انتخاب می کنیم. ( j = 5 )(�=5)به عنوان نتیجه تجزیه و تحلیل موجک که نشان دهنده CSI ژست پیاده سازی شده است. شکل 5 نتیجه الگوریتم تجزیه موجک را برای سه حرکت امنیتی و سه حرکت انتخاب دستگاه (کشیده شده در هوا) نشان می دهد. توجه داشته باشید که هر حرکت دست دارای یک الگوی منحصر به فرد در CSI خام است. سه الگوی شکل 5 a سه ژست امنیتی و سه الگوی شکل 5 را نشان می دهند. b نشان دهنده سه حرکت انتخاب دستگاه هستند.
دوم، ما الگوریتم انرژی کوتاه مدت (STE) را برای نتایج تجزیه موجک CSI اعمال می کنیم. STE الگوریتم معروفی است که در پردازش سیگنال گفتار استفاده می شود و می تواند گفتار و دوره های خاموش را طبقه بندی کند. نرخ STE بالا نشان دهنده زمانی است که در طی آن صحبت انجام می شود، در حالی که نرخ پایین نشان دهنده عدم گفتار یا سکوت است. به همین ترتیب، نرخ STE مطابق با تغییرات در CSI متفاوت خواهد بود. ما الگوریتم خود را همانطور که در تعریف STE ذکر شده در [ 33] پیشنهاد شده طراحی می کنیم ] پیشنهاد شده طراحی می کنیم. ما STE را برای CSI به صورت زیر تعریف می کنیم.
انرژی بلندمدت سیگنال CSI را می توان همانطور که در رابطه (4) نشان داده شده است بیان کرد:
که در آن E انرژی سیگنال CSI پس از تجزیه موجک است ( h ( c s i )ℎ(���)). تجزیه موجک h ( c s i )ℎ(���)می توان آن را در رابطه (5) بیان کرد:
جایی که n = 0 , 1 , 2 , . . . ، ن�=0،1،2،...،نطول پنجره است STE CSI را می توان از عبارت زیر تعیین کرد:
جایی که w ( )�()تابع پنجره است، n نمونه ای است که پنجره تحلیل در مرکز آن قرار دارد و N طول پنجره است. در اینجا یک پنجره مستطیلی اعمال می کنیم.
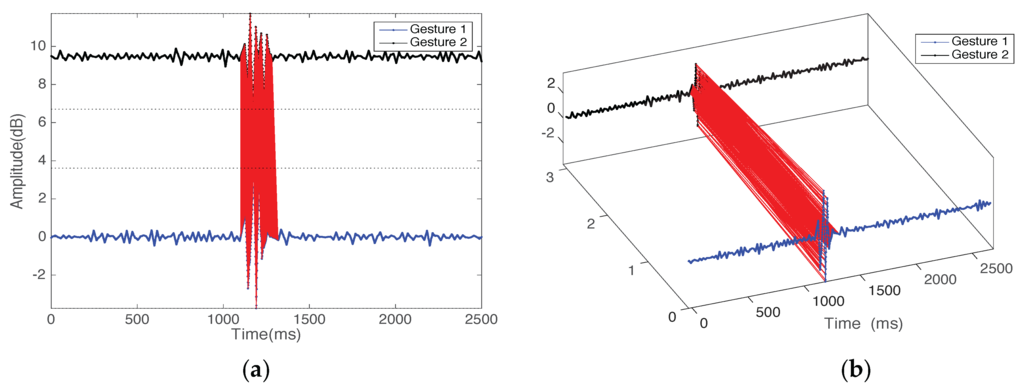
در شکل 6 ، خط قرمز نشان دهنده STE است که از سیگنال CSI پیروی می کند و با تغییر CSI به دلیل حرکت دست انسان، افزایش می یابد. عرض پنجره زمانی به وضوح دیده می شود.
4.3. طبقه بندی
ما از الگوریتم تابآوری زمانی پویا (DTW) برای طبقهبندی حرکات برای سیستم خود استفاده میکنیم. DTW اعوجاج های زمانی بین دو مدل را مطابقت می دهد تا مسیر تاب بین نقاط مربوطه را در دو سری زمانی پیدا کند. به طور کلی، DTW [ 34 ]، با توجه به دو سری زمانی g و g‘�‘با طول ها gمتر�مترو gn‘��‘را می توان به ترتیب به صورت زیر نوشت:
مسیر پیچ و تاب W بین g و g‘�‘سری های زمانی را می توان به صورت زیر نشان داد:
در جایی که L طول مسیر تاب است، l نشان دهنده ی است لتی ساعتلتیساعتعنصر مسیر، i یک شاخص در سری زمانی g است و j شاخصی در سری زمانی است. g‘�‘. بنابراین، مسیر تاب W را می توان به عنوان یک فاصله اقلیدسی تعریف کرد و همانطور که در رابطه (7) نشان داده شده است، محاسبه می شود:
با این حال، مسیر تاب بهینه به عنوان حداقل مسیر تاب فاصله سری دو زمان در نظر گرفته می شود. بنابراین، فاصله مسیر تاب بهینه را می توان همانطور که در رابطه (8) نشان داده شده است محاسبه کرد:
جایی که د (gمن،g‘j)�(�من،�‘�)فاصله بین دو شاخص نقطه داده دو سری زمانی از حرکات دست (شاخص های از g و از g‘�‘) در لتی ساعتلتیساعتعنصر مسیر تار DTW ما به صورت پویا نقاط شاخص مسیر پیچ و تاب را بر اساس نقاط شروع و پایان حرکت عقربه تشخیص داده شده توسط الگوریتم تقسیم بندی الگو (مورد بحث در بخش فرعی 4.2 ) تنظیم می کند و در نتیجه، روند طبقه بندی را سرعت می بخشد.
WiGeR می تواند حرکات را به صورت پویا با مقایسه فاصله مسیر تاب حرکات بر اساس حداقل فاصله هایی که از آزمایش های جامع در مرحله یادگیری تعیین شده است، طبقه بندی کند. این حرکات در نمایه سیستم ذخیره می شوند و به عنوان حرکات شناسایی شده در نظر گرفته می شوند. ما از جعبه ابزار یادگیری ماشین منبع باز [ 35 ] استفاده می کنیم. شکل 7 هم ترازی بین سری دو زمانی دو حرکت دست را نشان می دهد. DTW به صورت پویا فواصل حرکت دست شناسایی شده توسط الگوریتم STE را مقایسه می کند. DTW یک الگوریتم سریع و چابک است که عملکرد سیستم ما را بهبود می بخشد. نتایج تجربی اعتبار و کارایی روشهای تقسیمبندی و طبقهبندی ما را تأیید میکند.
5. آزمایش ها و نتایج
در این بخش، پیاده سازی سیستم پیشنهادی خود و نتایجی که از بیش از دو ماه آزمایش با شش داوطلب در سناریوهای مختلف به دست آورده ایم را شرح می دهیم.
5.1. راه اندازی آزمایشی
ما از یک روتر وای فای تجاری (TL-WR842N) با دو آنتن به عنوان نقطه دسترسی (AP) استفاده می کنیم. برای نقطه تشخیص (DP)، ما از لپتاپ Lenovo x201 مجهز به کارت شبکه IWL 5300، با سیستمعامل لینوکس 32 بیتی (نسخه 14.04 اوبونتو) و با نصب CSI-TOOLS منبع باز [36] استفاده میکنیم . ما نرخ انتقال بسته را روی 100 بسته در ثانیه تنظیم می کنیم تا اطلاعات کافی از هر حرکت دست بدست آوریم.
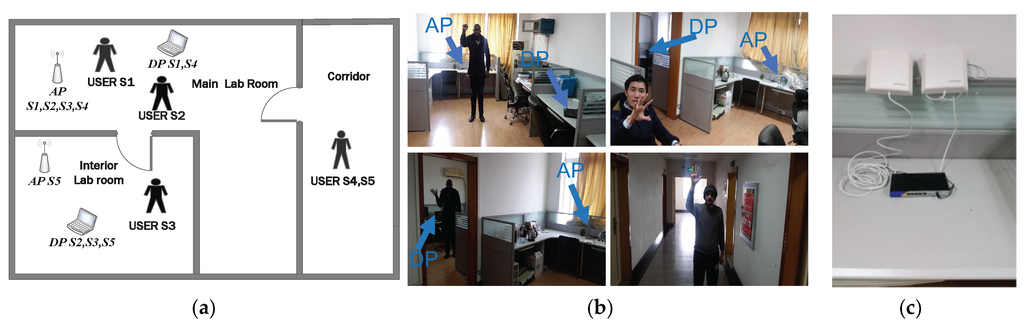
ما سیستم خود را در یک ساختمان آزمایشگاهی با استفاده از پنج سناریو مختلف همانطور که در شکل 8 نشان داده شده است راه اندازی کردیم . منطقه آزمایش 8 متر × 8 متر است و شامل یک اتاق آزمایشگاه اصلی و یک اتاق داخلی کوچک است. کاربران داوطلب برای سناریوهای مختلف در اتاق اصلی آزمایشگاه، اتاق داخلی و راهرو مجاور، همانطور که در شکل 8 نشان داده شده است، حرکات را انجام می دهند . سناریوها به شرح زیر است:
-
سناریوی 1: AP، DP و کاربر همگی در اتاق اصلی آزمایشگاه هستند. کاربر حرکات بین AP و DP را انجام می دهد، همانطور که در شکل 8 نشان داده شده است (برچسب S1).
-
سناریو 2: AP و کاربر در یک اتاق هستند، اما DP در اتاق آزمایشگاه داخلی است که با یک دیوار از هم جدا شده است. فاصله بین AP و DP تقریباً 3.5 متر و فاصله بین DP و کاربر تقریباً 3 متر است. همانطور که در شکل 8 (برچسب S2) نشان داده شده است، کاربر تقریباً 2 متر از AP فاصله دارد .
-
سناریو 3: DP و کاربر در اتاق آزمایشگاه داخلی هستند، در حالی که AP در اتاق آزمایشگاه اصلی است که با یک دیوار از هم جدا شده است. فاصله بین AP و DP 3.5 متر و فاصله بین DP و کاربر 2 متر است. کاربر تقریباً 4 متر از AP فاصله دارد.
-
سناریو 4: AP و DP هر دو در اتاق اصلی آزمایشگاه هستند. از کاربر خواسته می شود تا حرکاتی را در راهرو، به ترتیب در فاصله 7 متری و 5 متری از AP و DP انجام دهد. یک دیوار میانی وجود دارد.
-
سناریو 5: AP و DP هر دو در اتاق کوچک داخلی هستند، در حالی که کاربر در راهرویی است که با دو دیوار در فاصله تقریباً 8 متری از آنها جدا شده است.
5.2. نتایج آزمایش
ما سیستم پیشنهادی خود را در آزمایشگاهی با شش کاربر داوطلب پیاده سازی می کنیم. برای هر سناریو، از سه کاربر خواسته می شود تا حرکات پیشنهادی را به صورت جداگانه انجام دهند. ما در مجموع 300 نمونه از هر حرکت از این سه کاربر برای هر سناریو جمعآوری میکنیم—مجموع 100 نمونه از هر ژست از هر کاربر که طی سه جلسه جمعآوری شده است، که به ترتیب شامل 30، 30 و 40 نمونه از هر حرکت است، همانطور که نشان داده شده است. در جدول 2 .
ما طبقه بندی کننده خود را برای هر جلسه با استفاده از کل نمونه های هر حرکت جمع آوری شده از دو کاربر مختلف آموزش می دهیم. سپس، نمونههای هر ژست را که از کاربر دیگری جمعآوری شده است، آزمایش میکنیم. ما آزمایش را برای سه کاربر انجام می دهیم. در هر آزمون، نمونههای آموزشی شامل نمونههایی از کاربر هدف نمیشوند و کاربر هدف را برای اعتبارسنجی متقاطع کنار میگذاریم.
ما دقت نتایج آزمایشی را بر حسب میانگین دقت در هر حرکت برای هر کاربر و میانگین دقت در تمام حرکات پیادهسازی شده برای هر کاربر ارزیابی میکنیم. به طور کلی، دقت را می توان همانطور که در رابطه (9) نشان داده شده است محاسبه کرد:
که در آن TP، TN، FP و FN به ترتیب به نتایج مثبت واقعی، منفی واقعی، مثبت کاذب و منفی کاذب اشاره دارند. ما نتایج هر سناریو را با استفاده از یک ماتریس سردرگمی نشان میدهیم.
شکل 9 ماتریس های سردرگمی را برای سناریوهای مختلف نشان می دهد. شکل 9 a دقت سناریوی 1 را نشان می دهد. میانگین دقت 97.28٪ است. امتیاز دقت سناریوهای 2 و 3 به ترتیب 91.8% و 95.5% است که در شکل 10 b,c نشان داده شده است. همانطور که در شکل نشان داده شده است، زمانی که کاربر به DP نزدیکتر باشد، دقت تشخیص حرکت افزایش می یابد. شکل 9 d دقت سناریوی 4 را نشان می دهد که به دلیل فاصله زیاد و دیواره بین کاربر و AP و DP به 83.85% کاهش یافته است.
برای غلبه بر این مشکل، از دو آنتن WB-2400D300 استفاده کردیم ( شکل 8 ج). WB-2400D300 یک آنتن تجاری است که در [ 37] موجود است]؛ این یک آنتن جهتی دو قطبی 300 M و 16 دسی بل است که قدرت انتقال و دریافت بی سیم را افزایش می دهد و می تواند با فرستنده، گیرنده یا ایستگاه رله استفاده شود. این نوع آنتن را می توان برای نظارت تصویری بی سیم از راه دور با دوربین های شبکه استفاده کرد و از انتقال ویدئو با کیفیت بالا بی سیم از راه دور پشتیبانی می کند. به طور کلی، این یک آنتن عالی و با توان عملیاتی بالا است که سرعت انتقال بالا و پایداری خوب را با هزینه کم (هزینه آنتن به اندازه روتر) فراهم می کند. ما دو آنتن WB-2400D300 را به روتر متصل می کنیم و روتر را در اتاق اصلی آزمایشگاه به عنوان AP راه اندازی می کنیم. در غیر این صورت، تنظیمات آزمایشی مانند قبل برای سناریوهای 4 و 5 بود.
پس از انجام این تغییر آنتن، نتایج نشان داده شده در شکل 9 e,f منعکس کننده دقت تشخیص حرکت بهبود یافته است (به ترتیب 94.4% و 91% برای سناریوهای 4 و 5). استفاده از آنتن قدرتمندتر به حل مشکل تشخیص حرکات از طریق دیوارهای متعدد کمک می کند. در عین حال، چنین آنتن هایی بیش از یک روتر معمولی هزینه ندارند.
علاوه بر این، ما همچنین از دقت، فراخوانی و اندازه گیری F برای ارزیابی نتایج تجربی استفاده می کنیم. دقت ارزش پیشبینی مثبت است، یادآوری حساسیت است و F-measure یا امتیاز F1 میانگین وزنی دقت و فراخوان است. دقت، فراخوان و اندازه گیری F به صورت عبارات زیر محاسبه می شود:
از شکل 9 ، مقادیر دقت، فراخوانی و F1 هر حرکت را در هر سناریو می بینیم. نتایج بهدستآمده از دقت، فراخوان و F1 کارایی سیستم پیشنهادی را تایید کرد.
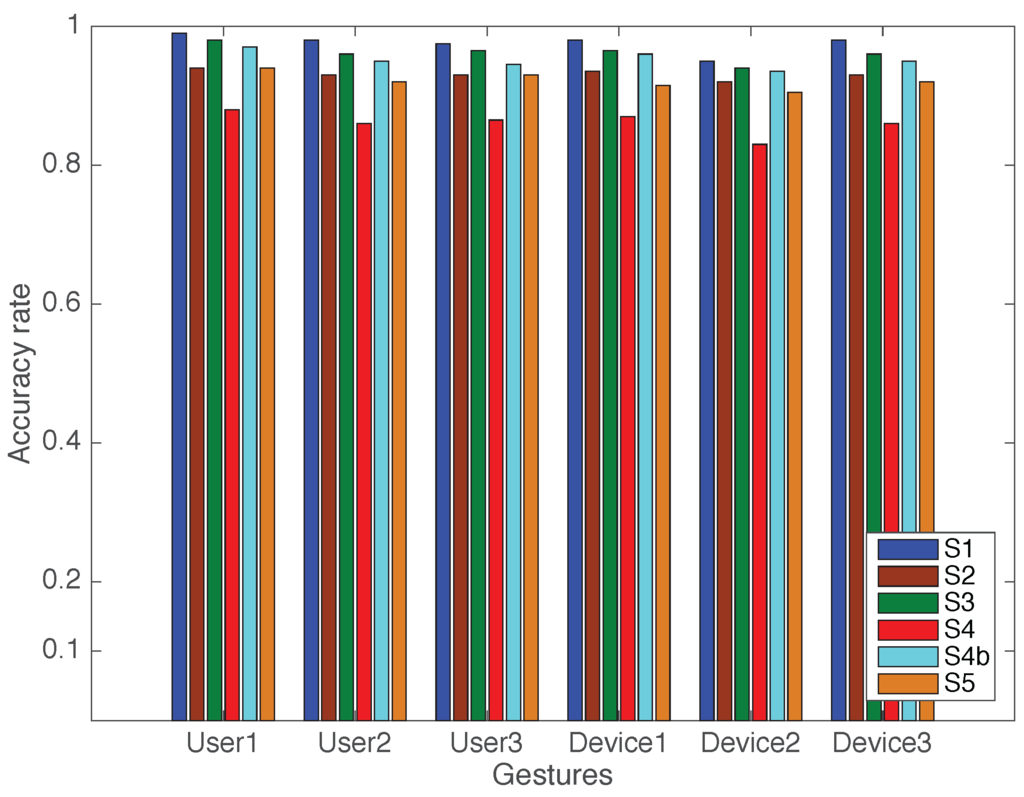
به طور کلی، سیستم در تشخیص ژستهای امنیتی و ژستهای انتخاب دستگاه نسبت به حرکات تعاملی دقیقتر است، زیرا انجام حرکات ترسیم شده از هوا زمان بیشتری نسبت به هفت ژست تعاملی میبرد و در نتیجه، تغییرات در CSI واضحتر است. شکل 10 میزان دقت کاربران و حرکات دستگاه را در تمام سناریوها نشان می دهد.
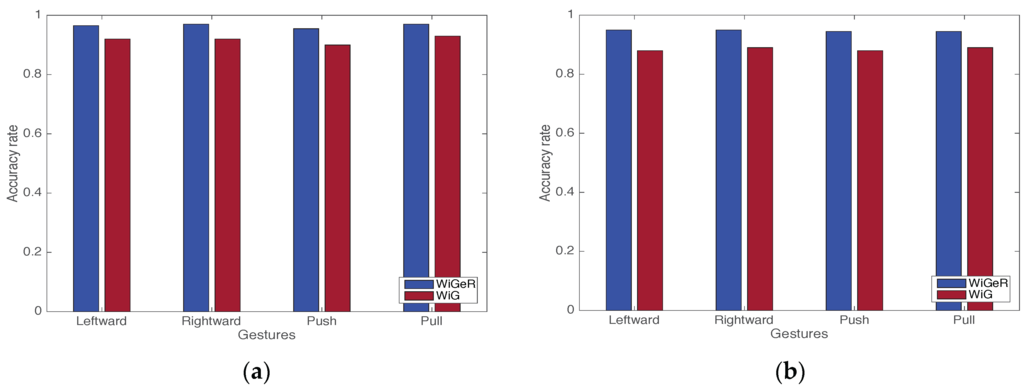
ما به طور تجربی WiGeR را با WiG [ 31 ] مقایسه می کنیم تا مزایای رویکرد خود را تأیید کنیم. ما چهار ژست را برای مقایسه انتخاب می کنیم: دو ژست از حرکات پیشنهادی برای WiGeR (کشیدن تند کشیدن به سمت چپ و راست) و دو حرکت از حرکات پیشنهادی توسط WiG (فشار و کشیدن). ما AP و DP را مانند سناریوهای LOS و NLOS که در [ 31 ] توضیح داده شده است، تنظیم می کنیم. ما داده ها را از یک کاربر داوطلب در اتاق آزمایشگاه خود جمع آوری می کنیم. برای هر سناریو، 90 نمونه از هر حرکت از این کاربر در 3 جلسه جمعآوری میشود. در طول هر جلسه، 30 نمونه از هر ژست جمع آوری می کنیم. ما از روش در WiG استفاده می کنیم [ 31] برای طبقه بندی حرکات. سپس نتایج WiG را با نتایج WiGeR مقایسه می کنیم. نتایج مقایسه نشان میدهد که WiGeR در هر دو سناریو LOS و NLOS عملکرد بهتری از WiG دارد، همانطور که در شکل 11 نشان داده شده است .
همانطور که این نتایج نشان میدهد، WiGeR از روشهای قبلی در دقت طبقهبندی حرکات دست و توانایی خود در تشخیص حرکات از طریق دیوارهای متعدد بهتر عمل میکند. علاوه بر این، WiGeR مسائل مربوط به امنیت و انتخاب دستگاه را با استفاده از یک مکانیسم ساده و سریع حل میکند.
6. نتیجه گیری و کار آینده
در این مقاله، ما WiGeR، یک سیستم تشخیص حرکت بدون دستگاه را ارائه میکنیم که با اعمال نفوذ اطلاعات وضعیت کانال سیگنالهای WiFi کار میکند. سیستم ما انسان ها را قادر می سازد تا با وسایل خانگی متصل به یک روتر WiFi ارتباط برقرار کنند. کاربر انسانی می تواند با استفاده از حرکات ساده دست، دستگاه مورد نظر را کنترل کند. ما هفت حرکت دست را پیشنهاد می کنیم که برای کنترل عملکردهای مختلف چندین لوازم خانگی طراحی شده است. طبق دانش ما، رویکرد ما اولین سیستم تشخیص حرکت بدون دستگاه است که هم امنیت کاربر و هم قابلیت انتخاب دستگاه را در بر می گیرد. ما بیش از 300 آزمایش را برای هر حرکت در یک آزمایشگاه سرپوشیده با استفاده از سناریوهای پیچیده و کاربران داوطلب مختلف برای ارزیابی سیستم پیشنهادی خود انجام می دهیم. نتایج نشان میدهد که سیستم ما به دلیل روشهای تقسیمبندی و طبقهبندی الگوی قوی، به نرخ دقت بالایی در سناریوهای مختلف دست مییابد. بهبود آنتن های گیرنده سخت افزاری دستگاه های خانگی می تواند این سیستم را انعطاف پذیرتر و قابل اعتمادتر کند.
ما قصد داریم این سیستم را برای طبقهبندی حرکات برای چندین کاربر با چندین دستگاه که همه به طور همزمان اجرا میشوند گسترش دهیم. علاوه بر این، هدف ما گسترش این کار برای طبقه بندی حرکات دست در فعالیت های مختلف انسانی است که به کاربران امکان می دهد در هر شرایطی با دستگاه ها ارتباط برقرار کنند. این کار منجر به توسعه یک سیستم سنجش جامع بدون دستگاه می شود که می تواند حرکات انسان مانند راه رفتن، افتادن، ایستادن، دراز کشیدن، انجام ژست ها و غیره را به طور دقیق طبقه بندی کند. علاوه بر این، ما علاقه مندیم که این رویکرد را برای ساخت یک صفحه کلید مجازی با توسعه حرکات با هوا برای همه حروف، علائم نقطه گذاری و نمادهای بالقوه گسترش دهیم.







بدون نظر