

خلاصه
اجسام متحرک ؛ شبکه اجتماعی ؛ مدل داده ; پایگاه داده گراف ; پرس و جوی جغرافیایی اجتماعی
1. معرفی
- –
-
Q1 : نزدیکترین رستوران هایی که در این ماه توسط دوستانم چک شده است را به من بگویید.
- –
-
س2 : هفته گذشته کی، کجا و کدام همکاران را ملاقات کردم؟
-
یک مدل GSM جامع برای نمایش فضای جغرافیایی، مسیرها و روابط اجتماعی اجسام متحرک به صورت یکپارچه پیشنهاد شده است. سیستم نوع برای این مدل تعریف شده و مجموعه ای از عملگرها طراحی شده است. امضاها و معنای اپراتورها نیز ارائه شده است.
-
یک چارچوب پیاده سازی برای یک مدل GSM پیشنهاد شده است و به مسائل پیاده سازی پرداخته می شود. یک نمونه اولیه بر اساس نمودار DBMS Neo4J [ 29 ] برای تأیید مدل پیاده سازی شده است.
-
آزمایشهای گسترده با مجموعه دادههای جغرافیایی اجتماعی واقعی برای ارزیابی کارایی و عملکرد مدل GSM پیشنهادی انجام میشود. نتایج نشان داد که کارایی پرس و جوهای فعال شده با مدل GSM بهتر از پیاده سازی مبتنی بر DBMS رابطه ای سنتی است.
2. کارهای مرتبط
3. مدل سازی داده های جغرافیایی-اجتماعی
3.1. نمودار جغرافیایی
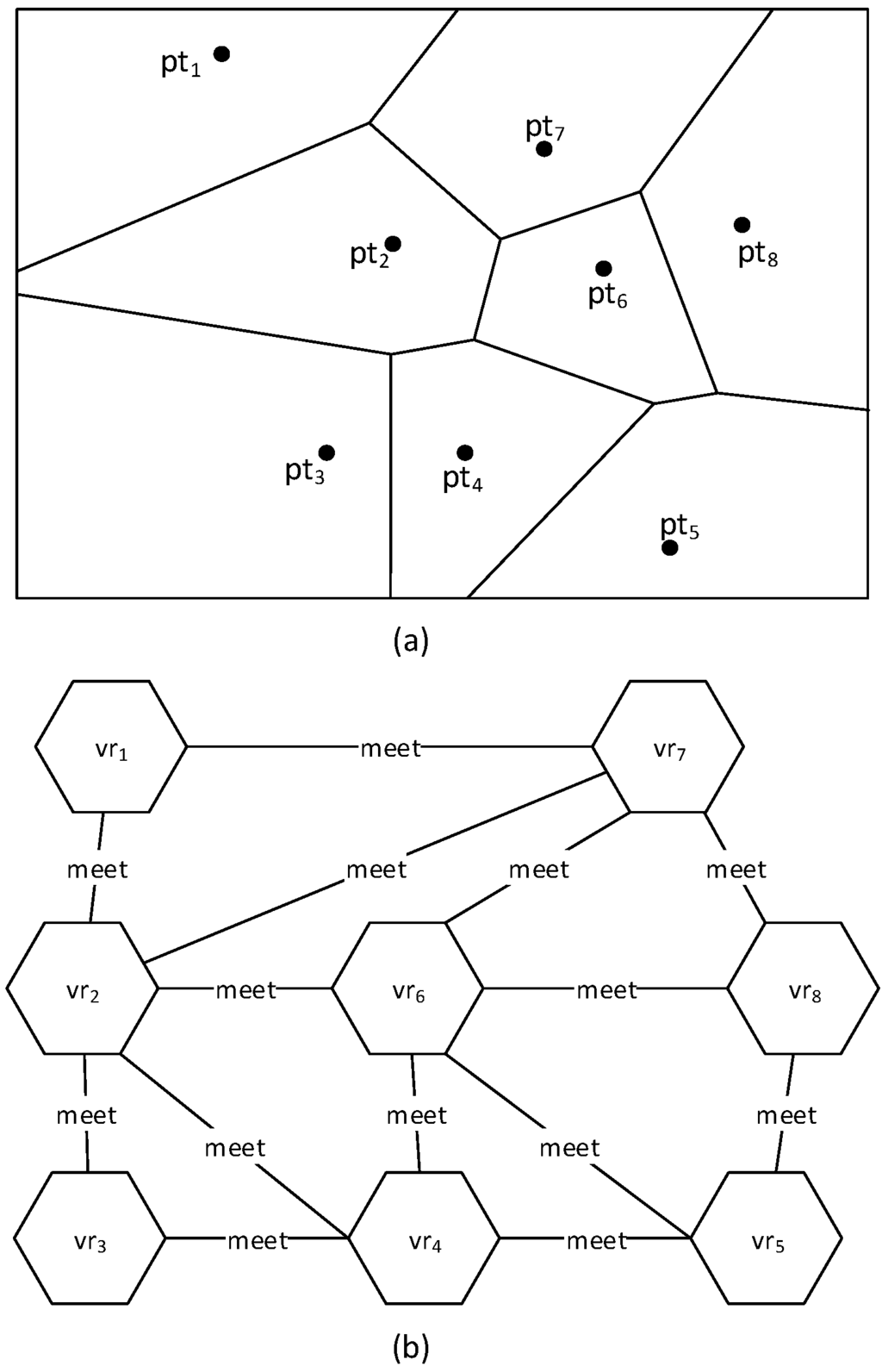
جایی که V(پمن)�(��)یک منطقه Voronoi است، q یک نقطه دلخواه در فضا است، و د( ق،پj)�(�,��)تابع فاصله است. این تعریف نشان می دهد که فاصله از هر نقطه در منطقه خاص تا پمن��نسبت به سایر نقاط کوچکتر است. شکل 1 a نمونه ای از منطقه Voronoi را نشان می دهد. کل فضای جغرافیایی بر اساس هشت POI به هشت منطقه Voronoi تقسیم شده است.
3.2. نمودار اجتماعی
3.3. نمودار حرکت
4. انواع داده ها و اپراتورها
4.1. انواع داده ها
جایی که rid شناسایی یک منطقه Voronoi است، geom با یک چند ضلعی نوع هندسه نشان داده می شود و p نشان دهنده نقطه موجود در منطقه Voronoi است. هر موقعیتی در این منطقه Voronoi vr می تواند به عنوان g pos تعریف شود :
جایی که rid شناسایی یک منطقه Voronoi است و pt نشان دهنده طول و عرض جغرافیایی موقعیت است.
که در آن mid و name شناسایی و نام یک جسم متحرک است. علاوه بر این، param به مجموعه ویژگی های دیگر شی اشاره می کند.
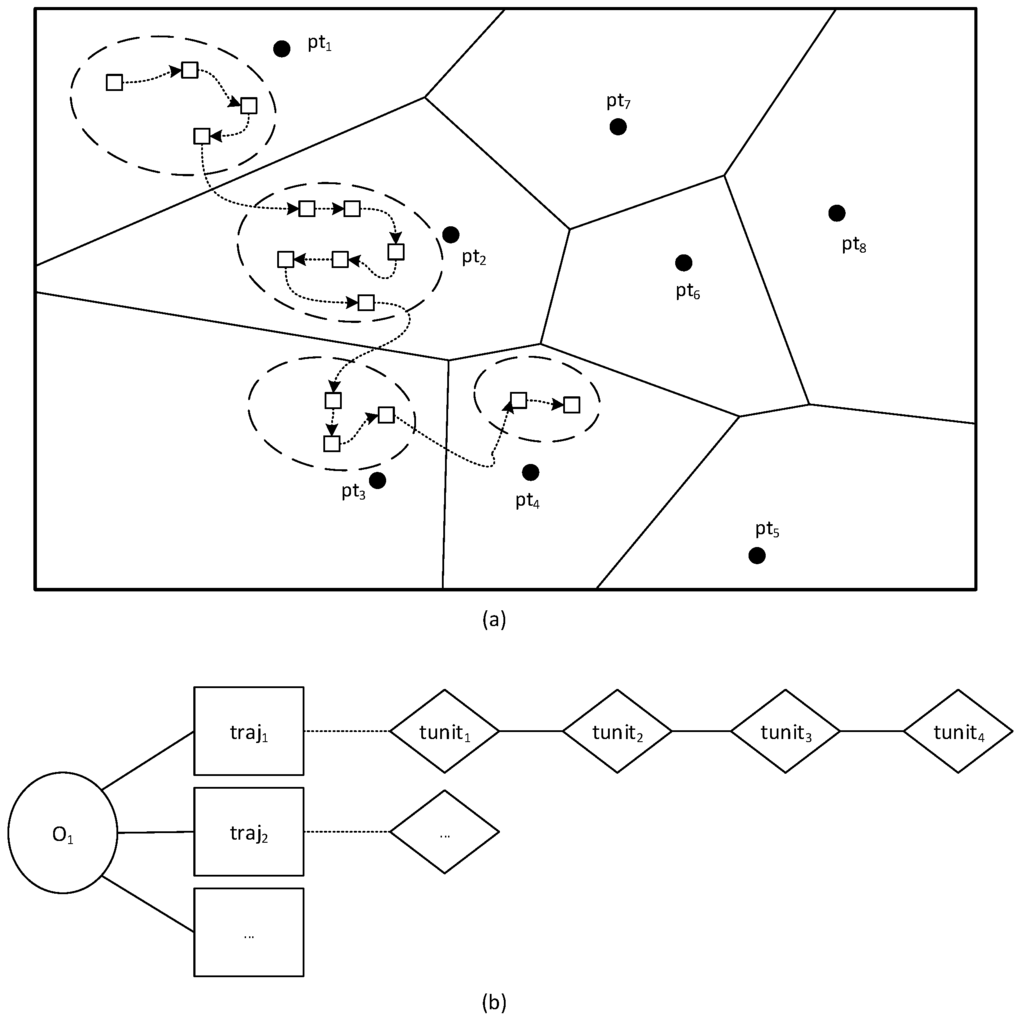
که در آن t i نشان دهنده زمان نقاط مکان و m نشان دهنده تعداد نقاط مکان است. سپس، مسیر حرکت یک جسم متحرک را می توان به عنوان مجموعه ای از واحدهای مسیر مدل کرد.
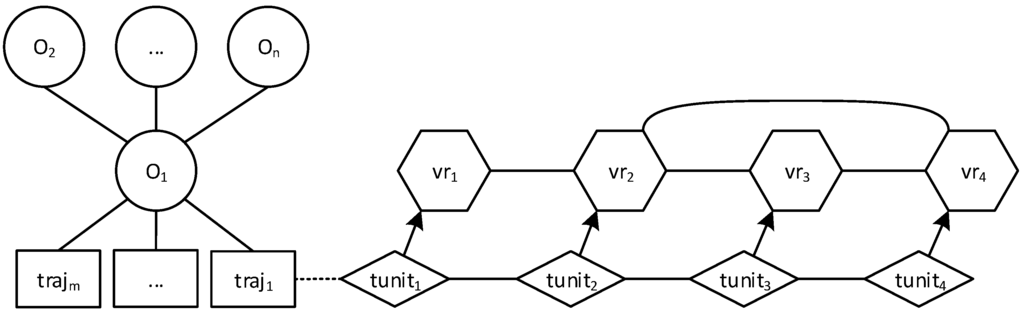
جایی که Rmm���برای نشان دادن روابط ترتیبی بین بخش های مسیری که متعلق به یک مسیر هستند استفاده می شود. آنها به بازیابی آسان کل مسیر حرکت یک جسم متحرک کمک می کنند. روابط Rsm���نشان دهنده روابط بین قطعه قطعه و شی mo است . Rgm���نشان دهنده روابط بین بخش tunit و مناطق Voronoi vr . آنها توانایی یافتن تمام مسیرها را در یک منطقه جغرافیایی خاص Voronoi فراهم می کنند.
4.2. اپراتورها
5. اجرا
5.1. معماری سیستم
5.2. پیاده سازی نمونه اولیه
| سوال 1 : آدرس ایمیل جک چیست؟ |
| گره ارزش ها ( |
| انتخاب کنید ( Gs ، نام =” جک ” ) ، ایمیل ) |
| پرس و جو 2 : همه دوستان جک را پیدا کنید. |
| گره ارزش ها ( |
| دریافت گره ( |
| انتخاب کنید ( G s ، نام =” جک “)، دوستی )، نام ) |
| پرس و جو 3 : فاصله مسیر بین جک و جان را پیدا کنید. |
| فاصله ( |
| خط کشی ( |
| انتخاب کنید ( G s ، نام =” جک “)، 2015 – 07 – 22) |
| خط کشی ( |
| انتخاب کنید ( G s , name =’ John ‘), 2015 − 07 − 22))) |
| پرسش 4 : جک ساعت 10 صبح کجا بود؟ |
| لحظه لحظه ( |
| خط کشی ( |
| انتخاب کنید ( G s ، نام =” جک “)، 2015 – 07 – 22)، 10: 00) |
| پرس و جو 5 : مسیرهای جک را بین ساعت 10 صبح تا 12 صبح پیدا کنید |
| دوره های زمانی ( |
| خط کشی ( |
| انتخاب کنید ( G s ، نام =” جک “)، 2015 − 07 − 22)، 10: 00، 12: 00)) |
| سوال 6 : جک چه زمانی از مرکز خرید Joy City عبور کرد؟ |
| موجودات ( |
| خط کشی ( |
| انتخاب کنید ( G s ، نام =” جک “)، 2015 − 07 − 22)، Joycity ) |
6. آزمایشات
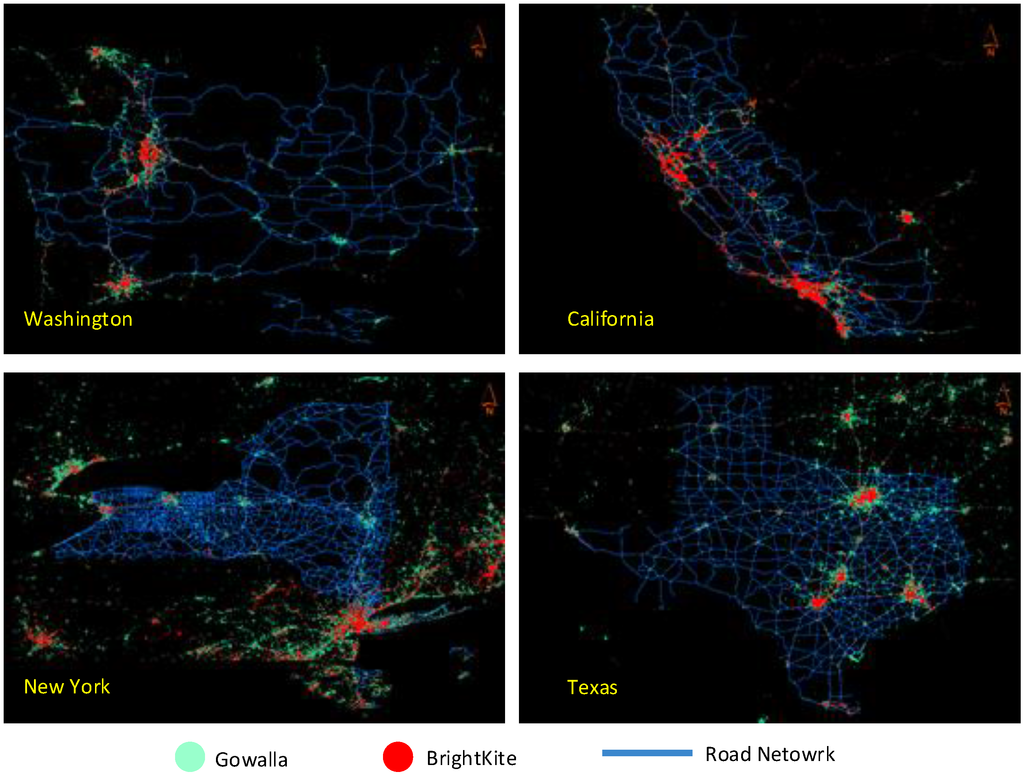
6.1. تنظیمات آزمایشی
-
ایجاد اشیاء TABLE (moID int، email char، onname char).
-
ایجاد رابطه اجتماعی جدول (از MOID int، رابطه char، toMOID int)؛
-
مسیر جدول را ایجاد کنید (trajID int، traj هندسه، ona char).
-
ایجاد INDEX idx mo در اشیاء (moID);
-
ایجاد INDEX idx ID در رابطه اجتماعی (از MOID، toMOID).
-
ایجاد INDEX idx traj در مسیر با استفاده از RTREE (traj).
6.2. نتایج تجربی
7. بحث
8. نتیجه گیری
اختصارات
| کلوب جی اس ام | Geo-Social-Moving |
| دی سی | واشنگتن |
| CA | کالیفرنیا |
| NY | نیویورک |
| TX | تگزاس |
| QE1 | عبارت پرس و جو 1 |
| QE2 | عبارت پرس و جو 2 |
| QE3 | عبارت پرس و جو 3 |
| QE4 | عبارت پرس و جو 4 |
منابع
- روده، RH; Lu, J. Parallel SECONDO: پردازش پرس و جو مقیاس پذیر در ابر برای برنامه های غیر استاندارد. مشخصات SIGSPATIAL 2015 ، 6 ، 3-10. [ Google Scholar ] [ CrossRef ]
- روده، RH; Ding, Z. مدلسازی و پرس و جو از اجسام متحرک در شبکه ها. VLDB J. 2006 ، 15 ، 165-190. [ Google Scholar ] [ CrossRef ]
- هاجری، ح. حکیم پور، ف. مدل داده های مکانی برای پایگاه داده های شی متحرک. بین المللی J. پایگاه داده Manag. سیستم 2014 ، 6 ، 1-20. [ Google Scholar ] [ CrossRef ]
- منگ، ایکس. دینگ، ز. Xu, J. مدل سازی اشیاء متحرک، مدیریت اشیاء متحرک ; Springer: برلین، آلمان؛ هایدلبرگ، آلمان، 2014. [ Google Scholar ]
- چن، توسط; یوان، اچ. لی، کیو. شاو، اس.-ال. لام، WH; چن، ایکس. مدل داده های مکانی-زمانی برای تحلیل جغرافیایی زمان شبکه در عصر داده های بزرگ. بین المللی جی. جئوگر. Inf. علمی 2015 ، 30 ، 1-31. [ Google Scholar ] [ CrossRef ]
- ولفسون، او. خو، بی. چمبرلین، اس. جیانگ، ال. پایگاه های داده اشیاء متحرک: مسائل و راه حل ها . IEEE: شیکاگو، IL، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- Ding, Z. UTR-tree: یک ساختار شاخص برای مسیرهای نامشخص کامل اجسام متحرک با محدودیت شبکه. در مجموعه مقالات نهمین کنفرانس بین المللی مدیریت داده های تلفن همراه (MDM 2008)، پکن، چین، 27-30 آوریل 2008. صص 33-40.
- یونگ، اچ. کیم، YS; Chung, YD QR-tree: یک روش کارآمد و مقیاس پذیر برای ارزیابی پرس و جوهای محدوده پیوسته. Inf. علمی 2014 ، 274 ، 156-176. [ Google Scholar ] [ CrossRef ]
- Pfoser، D.; جنسن، CS; Theodoridis, Y. Novel Approaces to the Indexing of Moving Object Trajectories ; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2000. [ Google Scholar ]
- خو، جی. روده، RH; ژنگ، ی. TM-RTree: شاخصی بر روی اشیاء متحرک عمومی برای جستجوهای محدوده. GeoInformatica 2015 ، 19 ، 487-524. [ Google Scholar ] [ CrossRef ]
- ساچاریدیس، دی. اسکوتاس، دی. Skoumas, G. نظارت مستمر نزدیکترین مسیرها. در مجموعه مقالات بیست و دومین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، دالاس، تگزاس، ایالات متحده آمریکا، 4 تا 7 نوامبر 2014. صص 361-370.
- شائو، ز. Taniar, D. جستجوی محدوده پیشرفته با اشیاء خارج از محدوده پرس و جو. وب جهانی 2015 ، 18 ، 1-23. [ Google Scholar ] [ CrossRef ]
- سیلوستری، سی. لتیچ، اف. اورلاندو، اس. جنسن، محاسبات مبتنی بر GPU CS از پرس و جوهای محدوده مکرر بر روی اشیاء متحرک. در مجموعه مقالات بیست و دومین کنفرانس بین المللی Euromicro در سال 2014 در مورد پردازش موازی، توزیع شده و مبتنی بر شبکه (PDP)، تورینو، ایتالیا، 12 تا 14 فوریه 2014. صص 640-647.
- ژانگ، آر. چی، جی. لین، دی. وانگ، دبلیو. وانگ، RC-W. یک الگوریتم بسیار بهینه برای پیوستن پرس و جوهای تقاطع پیوسته بر روی اجسام متحرک. VLDB J. 2012 ، 21 ، 561-586. [ Google Scholar ] [ CrossRef ]
- ترایچفسکی، جی. تاماسیا، ر. کروز، IF; شوئرمن، پی. هارتگلاس، دی. Zamierowski، C. رتبه بندی پیوسته نزدیکترین همسایگان برای مسیرهای نامشخص. VLDB J. 2011 ، 20 ، 767-791. [ Google Scholar ] [ CrossRef ]
- لانگ، ج.ا. نلسون، TA مروری بر روشهای کمی برای دادههای حرکتی. بین المللی جی. جئوگر. Inf. علمی 2013 ، 27 ، 292-318. [ Google Scholar ] [ CrossRef ]
- پلکیس، ن. تئودوریدیس، ی. Janssens, D. در مورد مدیریت و تجزیه و تحلیل مراحل زندگی ما. ACM SIGKDD Explor. Newsl. 2014 ، 15 ، 23-32. [ Google Scholar ] [ CrossRef ]
- ژنگ، ی. داده کاوی مسیر: یک نمای کلی. ACM Trans. هوشمند سیستم تکنولوژی (TIST) 2015 ، 6 ، 29-41. [ Google Scholar ] [ CrossRef ]
- چو، ای. مایرز، SA; Leskovec, J. دوستی و تحرک: حرکت کاربر در شبکه های اجتماعی مبتنی بر مکان. در مجموعه مقالات هفدهمین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 21 تا 24 اوت 2011. ص 1082-1090.
- اسکلاتو، اس. نولاس، ا. Mascolo, C. بهرهبرداری از ویژگیهای مکان در پیشبینی پیوند در شبکههای اجتماعی مبتنی بر مکان. در مجموعه مقالات هفدهمین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 21 تا 24 اوت 2011. ص 1046-1054.
- کراندال، دی جی; بکستروم، ال. کاسلی، دی. سوری، س. هاتنلوچر، دی. کلینبرگ، جی. استنتاج پیوندهای اجتماعی از روی تصادفات جغرافیایی. Proc. Natl. آکادمی علمی 2010 ، 107 ، 22436-22441. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تانگ، دبلیو. ژوانگ، اچ. تانگ، جی. یادگیری استنباط پیوندهای اجتماعی در شبکه های بزرگ. ماخ فرا گرفتن. بدانید. کشف کنید. پایگاه های داده 2011 ، 6913 ، 381-397. [ Google Scholar ]
- فاولر، جی جی فیس بوک: یک میلیارد و در حال شمارش. وال استریت جی 2012 ، 4 ، 1-10. [ Google Scholar ]
- Chorley، MJ; ویتاکر، آر.ام. آلن، SM شخصیت و شبکه های اجتماعی مبتنی بر مکان. محاسبه کنید. رفتار انسان 2015 ، 46 ، 45-56. [ Google Scholar ] [ CrossRef ]
- آهوجا، ر. آرمناتزوگلو، ن. پاپادیاس، دی. Fakas، GJ جئو-اجتماعی کلید واژه جستجو. Adv. تف کردن موقت پایگاه های داده 2015 ، 9329 ، 431-450. [ Google Scholar ]
- شی، ج. مامولیس، ن. وو، دی. Cheung، DW Clustering مکان مبتنی بر تراکم در شبکه های جغرافیایی اجتماعی. در مجموعه مقالات کنفرانس بین المللی ACM SIGMOD 2014 در مدیریت داده ها، Snowbird، UT، ایالات متحده، 22-27 ژوئن 2014. صص 99-110.
- ژوانگ، اچ. تانگ، جی. تانگ، دبلیو. لو، تی. چین، ا. وانگ، ایکس. یادگیری فعالانه برای استنتاج روابط اجتماعی. حداقل داده بدانید. کشف کنید. 2012 ، 25 ، 1-28. [ Google Scholar ] [ CrossRef ]
- آنگلز، آر. Gutierrez, C. بررسی مدل های پایگاه داده گراف. ACM Computing Surv. (CSUR) 2008 ، 40 ، 1-10. [ Google Scholar ] [ CrossRef ]
- Holzschuher، F. Peinl, R. عملکرد زبان های پرس و جو گراف: مقایسه سایفر، گرملین و دسترسی بومی در Neo4j. در مجموعه مقالات کارگاه های مشترک EDBT/ICDT 2013، جنوا، ایتالیا، 18 تا 22 مارس 2013. ص 195-204.
- اشنایدر، ام. اشیاء متحرک در پایگاههای داده و GIS: مسائل پیشرفته و باز، روندهای پژوهشی در علم اطلاعات جغرافیایی . Springer: برلین، آلمان، 2009. [ Google Scholar ]
- سیستلا، AP; ولفسون، او. چمبرلین، اس. دائو، اس. مدلسازی و پرس و جو از اجسام متحرک. در مجموعه مقالات کنفرانس بین المللی مهندسی داده (ICDE)، بیرمنگام، انگلستان، 7-11 آوریل 1997. صص 422-432.
- ولفسون، او. چمبرلین، اس. دائو، اس. جیانگ، ال. مندز، جی. هزینه و عدم دقت در مدلسازی موقعیت اجسام متحرک . IEEE: شیکاگو، IL، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- ولفسون، او. چمبرلین، اس. کالپاکیس، ک. Yesha, Y. مدلسازی اشیاء متحرک برای خدمات مبتنی بر مکان. توسعه دهنده زیرساخت. اوباش سیم. سیستم 2002 ، 2538 ، 46-58. [ Google Scholar ]
- فورلیزی، ال. روده، RH; ناردلی، ای. اشنایدر، ام. مدل داده و ساختارهای داده برای پایگاه داده های اشیاء متحرک. ACM SIGMOD 2000 ، 29 ، 319-330. [ Google Scholar ] [ CrossRef ]
- روده، RH; Böhlen، MH; ارویگ، م. جنسن، CS; لورنتزوس، NA; اشنایدر، ام. Vazirgiannis، M. پایه ای برای بازنمایی و پرس و جو از اجسام متحرک. ACM Trans. سیستم پایگاه داده (TODS) 2000 ، 25 ، 1-42. [ Google Scholar ] [ CrossRef ]
- منگ، ایکس. Ding, Z. DSTTMOD: پایگاه داده اجسام متحرک مبتنی بر مسیر آینده. سیستم خبره پایگاه داده Appl. 2003 ، 2736 ، 444-453. [ Google Scholar ]
- پدر و مادر، سی. اسپاکاپیترا، اس. رنسو، سی. آندرینکو، جی. بوگورنی، وی. دامیانی، ام.ال. مکدو، جی. پلکیس، ن. تئودریدیس، ی. Yan, Z. مدلسازی و تحلیل مسیرهای معنایی. ACM Computing Surv. 2013 ، 45 ، 39-76. [ Google Scholar ] [ CrossRef ]
- یان، ز. چاکرابورتی، دی. پدر و مادر، سی. اسپاکاپیترا، اس. Aberer، K. مسیرهای معنایی: محاسبات داده های تحرک و حاشیه نویسی. ACM Trans. هوشمند سیستم تکنولوژی (TIST) 2013 , 4 , 49. [ Google Scholar ] [ CrossRef ]
- Sandu Popa، I. مدلسازی، پرس و جو و نمایه سازی اجسام متحرک با حسگرها در شبکه های جاده ای . دانشگاه Versailles-Saint-Quentin: پاریس، فرانسه، 2010. [ Google Scholar ]
- جنسن، CS; لو، اچ. Yang, B. Indoor—یک مرز مدیریت داده جدید. IEEE Data Eng. گاو نر 2010 ، 33 ، 12-17. [ Google Scholar ]
- جین، پی. ژانگ، ال. ژائو، ال. وانگ، اچ. Yue, L. اجسام متحرک داخلی مبتنی بر RFID الکترونیکی: مدلسازی و کاربردها. Adv. مکانیک. الکترون. مهندس 2012 ، 177 ، 455-461. [ Google Scholar ]
- کیم، ی. کانگ، اچ. لی، جی. توسعه مدل داده های فضایی داخلی با استفاده از CityGML ADE. جی کره اسپات. Inf. Soc. 2013 ، 21 ، 11-21. [ Google Scholar ] [ CrossRef ]
- Brinkhoff, T. چارچوبی برای تولید اشیاء متحرک مبتنی بر شبکه. GeoInformatica 2002 ، 6 ، 153-180. [ Google Scholar ] [ CrossRef ]
- ساگلیو، جی.-م. Moreira, J. Oporto: یک سناریوی واقعی برای اجسام متحرک. GeoInformatica 2001 ، 5 ، 71-93. [ Google Scholar ] [ CrossRef ]
- تئودوریدیس، ی. سیلوا، جی آر. Nascimento، MA در مورد تولید مجموعه دادههای مکانی-زمانی، پیشرفتها در پایگاههای داده فضایی. Springer 1999 ، 1651 ، 147-164. [ Google Scholar ]
- خو، جی. Guting، RH GMOBench: معیاری برای اجسام متحرک عمومی. در مجموعه مقالات بیستمین کنفرانس بین المللی پیشرفت در سیستم های اطلاعات جغرافیایی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 7-9 نوامبر 2012. ص 410-413.
- هوانگ، اس.-سی. چن، بی.-اچ. تشخیص شی متحرک بسیار دقیق در سیستمهای نظارت بر ترافیک مبتنی بر نرخ بیت متغیر. IEEE Trans. شبکه عصبی سیستم یادگیری 2013 ، 24 ، 1920-1931. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هوانگ، اس.-سی. انجام دهید، B.-H. شبکه عصبی مبتنی بر تابع پایه شعاعی برای تشخیص حرکت در صحنه های پویا IEEE Trans. سایبر. 2014 ، 44 ، 114-125. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چنگ، F.-C.; چن، B.-H.; هوانگ، اس.-سی. یک روش شروع مجدد مدل پسزمینه مبتنی بر تشخیص تغییر درخشندگی ناگهانی. مهندس Appl. آرتیف. هوشمند 2015 ، 38 ، 138-146. [ Google Scholar ] [ CrossRef ]
- چنگ، F.-C.; چن، B.-H.; هوانگ، اس.-سی. یک روش تفریق پسزمینه ترکیبی با تشخیص نامزدهای پسزمینه و پیشزمینه. ACM Trans. هوشمند سیستم تکنولوژی (TIST) 2015 ، 7 ، 21-31. [ Google Scholar ] [ CrossRef ]
- چن، B.-H.; هوانگ، اس.-سی. الگوریتم استخراج وسایل نقلیه متحرک مبتنی بر شبکه های عصبی احتمالی برای سیستم های نظارت ترافیک هوشمند Inf. علمی 2015 ، 299 ، 283-295. [ Google Scholar ] [ CrossRef ]
- بوگورنی، وی. رنسو، سی. آکینو، آر. لوکا سیکیرا، اف. آلوارس، LO CONSTAnT – یک مدل داده مفهومی برای مسیرهای معنایی اجسام متحرک. ترانس. GIS 2014 ، 18 ، 66-88. [ Google Scholar ] [ CrossRef ]
- اسپاکاپیترا، اس. پدر و مادر، سی. دامیانی، ام.ال. de Macedo، JA; پورتو، اف. وانگنوت، سی. دیدگاه مفهومی در مسیرها. دانستن داده ها مهندس 2008 ، 65 ، 126-146. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژنی، د. فریدا، ع. غزاله، ح. کلارامونت، سی. یک رویکرد معنایی برای مدلسازی مسیرها در فضا و زمان. Adv. مفهوم. مدل. چال. چشم انداز 2009 ، 5833 ، 347-356. [ Google Scholar ]
- موکبل، MF; سروات، ام. تحرک و شبکه های اجتماعی: دیدگاه مدیریت داده. Proc. VLDB Enddow. 2013 ، 6 ، 1196-1197. [ Google Scholar ] [ CrossRef ]
- ژنی، د. فریدا، ع. کلارامونت، سی. غزالا، HB یک مدل داده مبتنی بر معنایی برای دستکاری مسیرها: کاربرد در حمل و نقل شهری. وب وایرل. Geogr. Inf. سیستم 2015 ، 9080 ، 124-142. [ Google Scholar ]
- یان، ز. چاکرابورتی، دی. پدر و مادر، سی. اسپاکاپیترا، اس. Aberer, K. SeMiTri: چارچوبی برای حاشیه نویسی معنایی مسیرهای ناهمگن. در مجموعه مقالات چهاردهمین کنفرانس بین المللی گسترش فناوری پایگاه داده، اوپسالا، سوئد، 21 تا 24 مارس 2011. صص 259-270.
- بوگورنی، وی. آوانچینی، اچ. de Paula، BC; Kuplich، CR; Alvares، LO Weka-STPM: معماری نرم افزار و نمونه اولیه برای داده کاوی مسیر معنایی و تجسم. ترانس. GIS 2011 ، 15 ، 227-248. [ Google Scholar ] [ CrossRef ]
- بوگورنی، وی. هوسر، سی. Alvares, L. یک مدل داده مفهومی برای داده کاوی مسیر. Geogr. Inf. علمی 2010 ، 6292 ، 1-15. [ Google Scholar ]
- دامیانی، ام.ال. والدز، اف. عیسی، ح. حرکت اشیاء فراتر از مسیرهای خام و معنایی. در مجموعه مقالات سومین کارگاه بین المللی مدیریت اطلاعات برای برنامه های کاربردی موبایل، ریوا دل گاردا، ایتالیا، 26 اوت 2013. جلد 4، ص 1-10.
- هو، ی. یانوویچ، ک. کارال، دی. شیدر، اس. کوهن، دبلیو. برگ کراس، جی. هیتزلر، پی. دین، م. کولاس، دی. الگوی طراحی ژئوآنتولوژی برای مسیرهای معنایی. تف کردن Inf. نظریه 2013 ، 8116 ، 438-456. [ Google Scholar ]
- پایوا نوگیرا، تی. بزرا براگا، آر. مارتین، اچ. یک رویکرد مبتنی بر هستی شناسی برای نشان دادن ویژگی های مسیر. در مجموعه مقالات پنجمین کنفرانس بین المللی 2014 در محاسبات برای تحقیقات و کاربردهای جغرافیایی، واشنگتن، دی سی، ایالات متحده آمریکا، 4 تا 6 اوت 2014. صص 102-107.
- یان، ز. مکدو، جی. پدر و مادر، سی. Spaccapietra، S. هستی شناسی ها و پرس و جوهای مسیر. ترانس. GIS 2008 ، 12 ، 75-91. [ Google Scholar ] [ CrossRef ]
- بولماکول، ا. کریم، ل. Lbath، A. مسیرهای متحرک شیء متا مدل و پرس و جوهای فضایی-زمانی. بین المللی J. پایگاه داده Manag. سیستم 2012 ، 4 ، 35-54. [ Google Scholar ] [ CrossRef ]
- کلاهدوزان، م. شهابی، سی. ورونوی مبتنی بر k نزدیکترین همسایه جستجو برای پایگاه داده شبکه فضایی. در مجموعه مقالات سی امین کنفرانس بین المللی پایگاه های داده بسیار بزرگ – جلد 30، تورنتو، کانادا، 29 اوت تا 3 سپتامبر 2004. صص 840-851.
- Egenhofer، MJ; Franzosa، روابط فضایی توپولوژیکی مجموعه نقطه RD. بین المللی جی. جئوگر. Inf. سیستم 1991 ، 5 ، 161-174. [ Google Scholar ] [ CrossRef ]
- Egenhofer، MJ; هرینگ، جی. چارچوبی ریاضی برای تعریف روابط توپولوژیکی. در مجموعه مقالات چهارمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، زوریخ، سوئیس، 23-27 ژوئیه 1990. ص 803-813.
- دونتگن، سی. بهر، ت. Guting، RH BerlinMOD: معیاری برای پایگاه داده های شی متحرک. VLDB J. 2009 ، 18 ، 1335-1368. [ Google Scholar ] [ CrossRef ]
- روده، RH; بهر، ت. Düntgen, C. Secondo: بستری برای تحقیقات پایگاه داده اشیاء متحرک و برای انتشار و یکپارچه سازی پیاده سازی های تحقیقاتی. IEEE Data Eng. گاو نر 2010 ، 33 ، 56-63. [ Google Scholar ]
- روده، RH; آلمیدا، وی. آنسورج، دی. بهر، ت. دینگ، ز. هوس، تی. هافمن، اف. Spiekermann, M. SECONDO: یک پلت فرم DBMS توسعه پذیر برای نمونه سازی و آموزش تحقیقاتی. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی مهندسی داده (ICDE’05)، توکیو، ژاپن، 5-8 آوریل 2005. صص 1115–1116.






© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر