1. معرفی
منابع زمین اساسی ترین و مهم ترین منابع در زندگی و تولید انسان است. آنها نه تنها به ساختار و عملکرد اکوسیستم ها مرتبط هستند، بلکه بر تعامل جهانی بین اکوسیستم ها و محیط سطح زمین نیز تأثیر می گذارند [ 1 ]. انواع مختلف کاربری اراضی کارکردهای توسعه اجتماعی، اقتصادی، زیست محیطی و اکولوژیکی متفاوتی دارند و در حالت تعادل پویا قرار دارند. تغییر کاربری زمین یک فرآیند پیچیده است که توسط تعاملات بین طبیعت و سیستم های اجتماعی در چندین مقیاس مکانی و زمانی ایجاد می شود [ 2 ، 3] .]. تقاضای متنوع جامعه برای منابع محدود زمین ریشه رویدادهای رقابت کاربری زمین است و در اصل نوعی منافع رقابتی است که در نهایت باعث ایجاد تبدیل متقابل بین انواع کاربری زمین می شود [4 ] . تغییرات پویا در منابع زمین در فرآیند رقابتی بین انواع مختلف کاربری زمین تجسم می یابد. این فرآیندی است که رضایت تقاضای جدید کاربری زمین را با سنجیدن و تغییر الگوهای کاربری زمین به دنبال تغییرات تقاضای انسان برای کاربری زمین به حداکثر می رساند [ 5 ].
مدلهایی که با سادهسازی و انتزاع کردن مشخص میشوند، نقش بسیار مهمی در درک و پیشبینی الگوها و فرآیند تکامل LUCC دارند. در حال حاضر، بسیاری از مدلهای شبیهسازی و پیشبینی تغییر کاربری اراضی و کارهای تحقیقاتی مرتبط با ارزش زیادی وجود دارد که معمولاً شامل مدل دینامیک سیستم (SD) [6]، مدل مارکوف [ 7 ]، تبدیل کاربری زمین و اثرات آن در وسعت منطقهای کوچک است. مدل CLUE-S، مدل سیستمهای چند عاملی (MAS) [ 8 ، 9 ]، مدل اتوماتای سلولی (CA) [ 10 ، 11 ، 12 ، 13 ] و ادغام این مدلها [ 14]]. بسیاری از مطالعات به ویژه بر دیدگاه کلان عوامل محرک برای شبیهسازی تغییرات کاربری اراضی تأکید دارند. با این حال، در واقع، تغییرات کاربری اراضی اغلب نتیجه اثرات یکپارچه عوامل ماکروسکوپی و میکروسکوپی طبیعی و انسانی است. این سوال باقی می ماند که چگونه می توان از نقطه نظر خرد رقابت کاربری محلی شروع کرد و سپس عوامل محرک کلان و اثرات خرد را به منظور ساخت یک مدل شبیه سازی تغییر کاربری قابل اعتماد ترکیب کرد، که در حال حاضر تبدیل شده است. پیشرفتی که ارزش مطالعه دارد
میلر پیشنهاد می کند که روابط بین موجودات نزدیک به معنای یک جغرافیای ساده و استریل نیست و فرآیندها و ساختارهای جغرافیایی پیچیده می توانند از تعاملات محلی پدید آیند [ 15 ]. CA یک مدل دینامیک شبکه است که در آن زمان، مکان و حالت همه گسسته هستند و تعامل مکانی و علیت زمانی هر دو محلی هستند. این مدل توانسته است فرآیند تکامل مکانی – زمانی سیستم های پیچیده را شبیه سازی کند [ 16 ، 17 ، 18 ، 19 ]. وضعیت هر سلول در طول زمان تغییر می کند و توسط قوانین انتقال محلی تعیین می شود، جایی که تعداد زیادی سلول تکامل سیستم های پویا را از طریق تعامل ساده تشکیل می دهند [ 20]]. Wolfram ثابت کرد که یک مدل CA میتواند پدیدههای طبیعی پیچیده را شبیهسازی کند و رفتار محلی بین افراد میتواند الگوهای تغییر جهانی را در زمان و مکان تغییر دهد [ 21 ]. اخیراً، مدلهای CA به طور فزایندهای در شبیهسازی و پیشبینی گسترش شهری و تحقیقات تغییر کاربری زمین به کار گرفته شدهاند، و نتایج قابلتوجهی به دست آوردهاند که نشان میدهد یک مدل CA میتواند به طور موثری ویژگیهای پیچیده تکامل کاربری زمین را در الگوی میکروسکوپی منعکس کند [22] . , 23 , 24 , 25 ].
این یک ویژگی اساسی یک CA است که رفتار پویای جهانی می تواند از قوانین محلی تکامل یابد. در مدلهای کاربری زمین، CA معمولاً میتواند انتقال یک سلول از یک کاربری زمین به کاربری دیگر را، بسته به کاربری زمین در همسایگی سلول، مدلسازی کند [ 26 ]. تغییرات فضایی در روابط بین نیروهای محرک و تغییر کاربری زمین در مدلهای CA استفاده از زمین مرسوم نادیده گرفته میشود، که بر اساس فرض همگنی فضایی [ 27 ] است. مدلهای CA موجود، ویژگیهای اساسی طرح اصلی CA را با معرفی روشهای هوشمند، و کاهش مداوم محدودیتهای مدل، بسیار تضعیف کردند [ 28] .]. اکثر مطالعات قبلی بر روی طراحی محدودیت، عوامل موثر و کسب هوشمندانه آنها متمرکز شده اند تا نتایج شبیه سازی CA را از دیدگاه کلان بهبود بخشند. با این حال، یکی از مهمترین ویژگی های یک CA اثر محلی در یک محله است. فقدان تحقیق در مورد اثرات و اصول محلی مزیت شبیه سازی تغییرات جهانی را از طریق تعامل محلی از دست داده است. یکی از روش های مهم برای حل این مشکل، توجه بیشتر به مطالعه رابطه فضایی مقیاس محلی، در عین حال معرفی تعدادی محدودیت جغرافیایی کلان به CA است. یانگ و همکاران (2014) یک مدل CA شبیه سازی تغییر کاربری زمین را طراحی کردند که بر روی نوع سلولی تبدیل کاربری زمین در جهات مختلف تمرکز داشت.29 ]. سیراکولیس و همکاران (2012) یک مدل CA را بر اساس یک همسایگی نامنظم طراحی کردند که در نظر گرفتن بسیار خوبی از تعامل محلی را منعکس می کرد و پتانسیل انتقال برای سلول را می توان با استفاده از شدت سیگنال های دریافتی از سلول های دیگر تعریف کرد. در همسایگی [ 30 ].
مطالعه تغییر کاربری اراضی نه تنها به مقیاس های جهانی و کلان نیاز دارد، بلکه به مقیاس محلی و خرد نیز نیاز دارد تا همکاری کنند [ 31 ، 32 ]. CA چارچوب محاسباتی شبیهسازی دینامیکی مکانی-زمانی را با استفاده از یک رویکرد از پایین به بالا ارائه میکند و میتواند شبیهسازی تغییر کاربری زمین را تحت تأثیر همهجانبه عوامل طبیعی و اجتماعی ماکروسکوپی و همچنین تعامل همسایگی محلی سلولها به دست آورد. 33 ، 34 ، 35]. بر اساس دستاوردهای ذکر شده در بالا، در این مطالعه، یک مدل اتوماتای سلولی رقابت کاربری محلی (LLUC-CA) معرفی شده است که بر اساس رقابت کاربری محلی، ارزیابی تناسب زمین، تجزیه و تحلیل تقاضا از انواع مختلف کاربری زمین، و یک الگوریتم تخصیص رقابت کاربری چند هدفه، به منظور شبیهسازی تغییرات کاربری زمین در سطح خرد، که بر درک اثرات همسایگی در فرآیند شبیهسازی تمرکز دارد. به منظور بحث در مورد روش شبیهسازی تغییر کاربری زمین بر اساس یک LLUC-CA، و برای تأیید پایایی مدل، و همچنین ارائه پشتیبانی نظری و فنی برای شبیهسازی و پیشبینی تغییرات کاربری، یک مطالعه موردی انجام شد. در استراحتگاه تفریحی توریستی ملی جینشیتان (از این پس جینشیتان نامیده می شود)، که یک گستره بسیار محلی است.
2. داده ها و روش ها
2.1. منطقه مطالعه
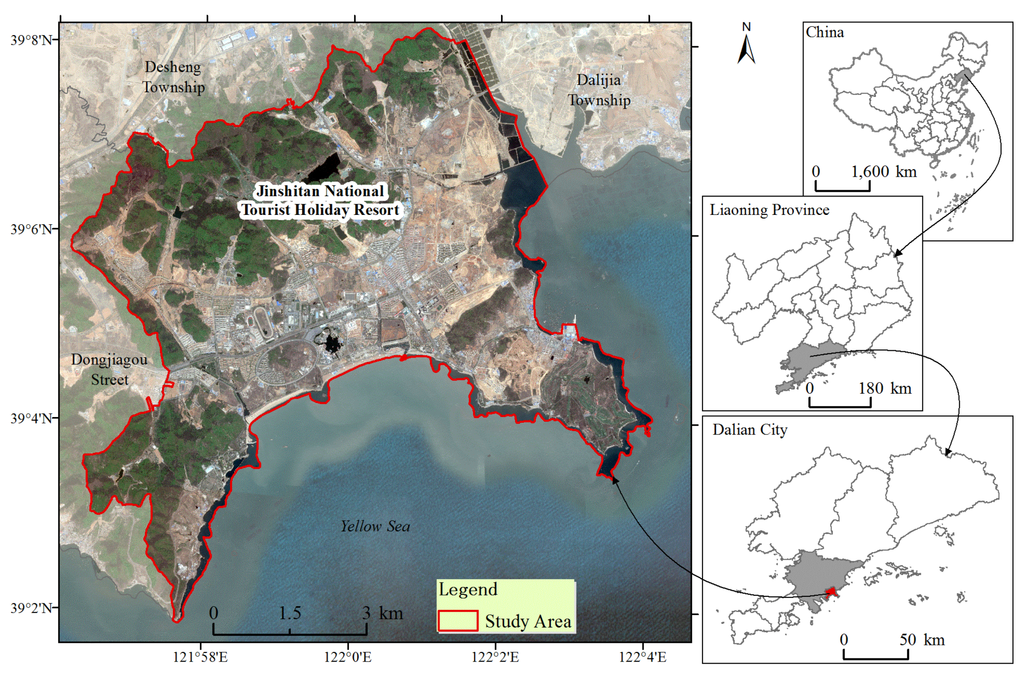
جینشیتان، باغ پشتی دالیان، استان لیائونینگ، چین (39°1′49″–39°8′10″ شمالی، 121°56′11″–122°4′42″ شرقی)، در شبه جزیره Liaodong واقع شده است. در ناحیه شمال شرقی دالیان ( شکل 1 ). رو به دریای زرد در شرق است و از شبه جزیره شرقی، شبه جزیره غربی، قلب باز و ساحل بین دو شبه جزیره تشکیل شده است. مساحت آن تقریباً 58 کیلومتر مربع است. این منطقه که در مجاورت منطقه شهری دالیان قرار دارد، یک منطقه معمولی با یک منطقه روستایی-شهری و یک منطقه ساحلی است. این شهر که به عنوان یک شهر روستایی تحت تسلط کشاورزی سنتی آغاز شد، در سال 1988 به عنوان یک نقطه منظره ملی، در سال 2004 به عنوان یک ژئوپارک ملی چین و یک منطقه گردشگری 5A در سال 2010 شناسایی شد. . برای نزدیک به 25 سال، منطقه مورد مطالعه توسعه سریع اقتصادی و تغییر کاربری زمین را تجربه کرده است و بنابراین دارای ارزش تحقیقاتی بالایی است.
2.2. منابع داده و پردازش
سال های 1988، 2004 و 2010 سه گره زمانی هستند که اهمیت مهمی برای توسعه جینشیتان دارند. با توجه به دسترسی به داده ها، این مطالعه تحقیقات خود را بر اساس داده های کاربری اراضی سال های 1988، 2003 و 2012 استوار کرد. نقشه اداری، جاده، مرکز شهر و داده های خط ساحلی عمدتاً از پایگاه داده جامع زیربنایی به دست آمده است. همه این داده ها توسط اداره منابع زمین و مسکن شهرداری دالیان، از جمله نقشه های توپوگرافی و تصاویر سنجش از دور ارائه شده است.
با ترکیب دادههای برداری کاربری زمین با تصاویر سنجش از دور با وضوح مکانی بالا، نقشههای مربوط به کاربری اراضی جینشیتان در سالهای 1988، 2003 و 2012 توسط یک سری پردازشهایی مانند تبدیل طرحریزی، تنظیم فضایی، بررسیهای خطای توپولوژی به دست آمد. برش، تفسیر تصویر، و عادی سازی داده ها. از نرم افزار ArcGIS10.2 و ERDAS Imaging 2013 استفاده شد. به منظور سادهسازی فرآیند شبیهسازی، انواع کاربریهای زمین توسط ArcGIS به زمین کشاورزی، زمین ساختمانی، جنگل و آب طبقهبندی شدند. سه نوع اول کاربری زمین نسبت زیادی را به دست آوردند و به وضوح تغییر کردند و آب یک منبع طبیعی مهم بود که تأثیر برجسته ای بر جینشیتان داشت ( جدول 1).). همه دادههای مکانی به سیستم مختصات جغرافیایی 80 شیان و سیستم مختصات پیشبینی شده تقسیمکننده منطقه گاوس کروگر استاندارد شدند و دادههای شطرنجی با اندازه شبکه 5 متر × 5 متر نمونهبرداری مجدد شدند.
2.3. مدل
از طریق فعل و انفعالات محلی، یک CA می تواند تغییرات جهانی را شبیه سازی کند، در حالی که ظرفیت محاسباتی جهانی با محاسبات محلی به دست می آید. در مدل های جهانی فرض بر این است که همه متغیرها یکسان هستند. با این حال، یک موقعیت ممکن این است که مدل های جهانی را نمی توان به طور بسیار موثر در یک مکان خاص بیان کرد. بنابراین، یک مدل LLUC-CA از سلولها در انواع مختلف کاربری زمین در یک محله به عنوان سناریوی محله استفاده میکند و قوانین انتقال محلی را از طریق ترکیب رقابت کاربری محلی و عوامل محرک کلان تشکیل میدهد. با وجود این قوانین، می تواند رفتار دینامیکی جهانی و پیچیده را تکامل دهد و سپس تمام تغییرات کاربری زمین را شبیه سازی کند.
2.3.1. مسابقه محلی کاربری اراضی
در حال حاضر، جامعه علم کاربری زمین هنوز معنای رقابت محلی کاربری زمین را به وضوح تعریف نکرده است. قبل از انجام تحقیقات بیشتر، باید تعریف روشنی در رابطه با این سوال علمی ارائه شود. در جغرافیای فیزیکی، اصطلاح «محلی» ممکن است ناحیهای باشد که یک فرآیند خاص تأثیر آشکاری بر آن دارد. با این حال، از نظر تجزیه و تحلیل داده های مکانی، “فضای محلی” اغلب به صورت فاصله مشخصی از فضا که از یک نقطه یا یک منطقه خاص شروع می شود، به عنوان مثال، محل یا همسایگی آن نقطه یا منطقه بیان می شود [36 ] . تعاملات محلی بین موجودات قادر به ایجاد رفتارهای جهانی پیچیده و همچنین ساختارهای پیچیده در فضا و زمان هستند [ 15]]. در این مطالعه، “رقابت کاربری محلی (LLUC)” به عنوان رقابت متقابل بین انواع مختلف کاربری اراضی در مناطق همسایه تعریف شده است. رقابت محلی استفاده از زمین به عنوان رقابت متقابل بین حالت های مختلف سلولی در یک محله، با کاهش شدت تعامل سلول با افزایش فاصله بین سلول ها، و وسعت فضای کاری که در محل تجسم یافته است، تحقق می یابد. بنابراین، نتیجه رقابت تغییر حالت کاربری زمین سلول مرکزی است.
تغییرات کاربری زمین به دلیل رقابت در داخل و بین انواع کاربری های مختلف زمین رخ می دهد. خودهمبستگی فضایی نه تنها بر روی سلولهای نوع کاربری زمین یکسان، بلکه بر روی انواع مختلف سلولهای کاربری زمین نیز عمل میکند. این مطالعه فرض کرد که سه نوع کاربری زمین، یعنی زمین کشاورزی (A)، زمین ساختمانی (C) و زمین جنگلی (F)، در یک محله مور 5 × 5 (شعاع r = 2) و سلولهای نوع کاربری مختلف وجود دارد . با رنگ های مختلف مشخص شدند. تحت تأثیر رقابت محلی کاربری زمین و عوامل محرک کلان، سلولها در یک حالت خاص میتوانند به جهات مختلف انتقال یابند و رابطه رقابتی بین انواع کاربری زمین در شکل 2 نشان داده شده است.. همانطور که در شکل نشان داده شده است، عدد (A) = 7 بیان می کند که تعداد سلول های زمین کشاورزی در سناریوی محله 7 است، Num (C) = 8 بیان می کند که تعداد سلول های زمین ساخت و ساز در سناریوی محله 8 است. ، و غیره. با توجه به اینکه تغییر نوع اراضی سلول مرکزی بر اساس سناریوی همسایگی مستقل آن صورت گرفته است، برهمکنشهای بین انواع کاربریها برابر نبود.
رابطه رقابت بین سلول های مرکزی و همسایه با شدت رقابت کاربری زمین بیان می شود. شدت رقابت کاربری زمین دائما در حال تغییر بود، این یک پارامتر پویا بود و از مدل تعامل فضایی الهام گرفته شده بود و شدت رقابت کاربری محلی سلول (i,j) که حالت (یا نوع کاربری زمین) k است ، در زمان t را می توان به صورت زیر توصیف کرد:
که در آن N تعداد کل سلول ها در همسایگی سلول مرکزی است (در این مطالعه 25 است). J(St ( i+x,j+y)) برای قضاوت در مورد وضعیت سلول (i+x,j+y ) استفاده میشود، آیا k است ، 1 برای درست و 0 برای نادرست است. d(i+x,j+y ) هسته کانولوشن است و فاصله سلول مرکزی (i,j ) تا سلول همسایگی (i+x,j+y ) را نشان می دهد، اگر (i+x,j+y) ) سلول مرکزی است، d(i+x,j+y)= 1; در غیر این صورت اگر (i+x,j+y ) فقط به (i,j ) نزدیک باشد ، d(i+x,j+y)= 2; یا اگر (i+x,j+y ) و(i,j ) توسط یک سلول از هم جدا می شوند، سپس d(i+x,j+y)= 3. اگر سلول همسایگی به سلول مرکزی نزدیکتر باشد، تأثیر روی آن بیشتر خواهد بود.
2.3.2. تناسب زمین و پتانسیل انتقال
فرآیند LUCC بسیار پیچیده است و شرایط مناسب، علاوه بر اثر محله محلی، نقش بسیار مهمی در انتقال کاربری زمین دارد. به منظور امکانپذیر ساختن تحلیل تناسب زمین هم از نظر بیوفیزیکی و هم از نظر اجتماعی-اقتصادی، بررسی جامع عوامل اجتماعی، اقتصادی، سیاسی، محیطی و سایر عوامل محرک و همچنین بازتابی از تأثیرات مختلف این عوامل مورد نیاز است. بنابراین در این مدل یک سری لایه های شاخص تناسب نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتبرای هر نوع کاربری با استفاده از روش ارزیابی چند معیاره (MCE) ساخته شد:
که در آن F k,f به امتیازدهی معیارهای f به زمین نوع k اشاره دارد و این امتیاز با روش مقدار حداکثر به 0~1 نرمال می شود. وقتی 1 ≦ m ≦ α ، Fk,f نشان می دهد که عوامل از گروهی از متغیرهای فاصله مکانی و توپوگرافی تشکیل شده اند. هنگامی که 1 ≦ m ≦ β ، F k,f محدودیت های ایجاد شده توسط زمین حفاظت شده، توپوگرافی و غیره را نشان می دهد و مقدار این امتیاز 1 یا 0 است. وزن ضریب f برای کاربری زمین نوع k با W نمایش داده می شود . k,f و با روش AHP بدست آمد [ 37].
هر سلول با نوع خاصی از کاربری زمین مطابقت داشت. روندهای تاریخی تغییرات کاربری زمین، تناسب زمین، و سیاست ها و اقتصاد مرتبط برای ساخت قوانین انتقال استفاده شد. آنها امکان انتقال هر سلول را با هم کنترل کردند و وقتی احتمال آن از آستانه کنترل فراتر رفت، وضعیت سلول تغییر کرد. سلولهای درون فضای سلولی، وضعیت بهروزرسانی را مطابق این قوانین انتقال محلی همگامسازی میکنند و کل فضای سلولی به عنوان تغییر در بعد زمان گسسته نشان داده میشود. تعریف قوانین انتقال، بخش اصلی شبیه سازی یک CA استاندارد است، و آنها می توانند یک تکامل پویا را هدایت کنند. قوانین انتقال مدل LLUC-CA را می توان به عنوان پتانسیل انتقال کاربری زمین نشان داد. با توجه به پیچیدگی طبیعت، برخی از ویژگی های پیش بینی نشده فرآیند تغییر کاربری زمین را نمی توان با متغیرهای مستقل توضیح داد. این می تواند باعث شود که نتایج شبیه سازی از طریق معرفی متغیر تصادفی برای بیان عدم قطعیت ماهیت و جغرافیای یک CA به واقعیت نزدیکتر شود. در هر شبیه سازی، احتمالات انتقال نهایی به کاربری اراضیk از سلول (i,j ) در زمان t توسط شدت رقابت کاربری محلی، شاخص تناسب زمین و متغیر تصادفی به صورت زیر محاسبه شد:
که γ یک متغیر تصادفی با بازه 0 تا 1 است و α پارامتری برای کنترل محدوده متغیر تصادفی است. محاسبه تکراری پویا تغییر همسایگی در فرآیند شبیهسازی تغییر کاربری زمین مورد نیاز است، وضعیت سلول همسایگی پویا است، به طوری که پتانسیل انتقال کاربری زمین نیز پویا است و در هر مرحله زمانی قوانین انتقال مدل بهروزرسانی میشود.
2.3.3. تجزیه و تحلیل تقاضای انواع مختلف زمین
جدای از رقابت بین انواع کاربری های مختلف و تناسب زمین، الگوی تغییر کاربری به تقاضا برای کاربری زمین نیز بستگی دارد. مدل مارکوف، به عنوان یک مدل احتمال فضایی مبتنی بر شطرنجی، اغلب برای پیشبینی رویدادهای جغرافیایی که هیچ ویژگی پساثری ندارند، استفاده میشود و به طور گسترده در شبیهسازیهای LUCC استفاده شده است. با این فرض که حالت اقتصادی اجتماعی فعلی تحت شرایط توسعه دائمی است، مدل مارکوف ظرفیت پیش بینی تغییر کمیت انواع کاربری زمین در آینده را دارد [ 38 ، 39] .]. فایل مناطق انتقالی از تجزیه و تحلیل زنجیره مارکوف از دو نقشه کاربری قبلی زمین، مقدار تغییر کاربری مورد انتظار از هر دسته موجود به دسته دیگر را در دوره زمانی بعدی مشخص کرد. با فرض اینکه m نوع استفاده از زمین وجود داشته باشد ، از زمان t به زمان t +1 حالت کاربری زمین i به j تبدیل می شود ( i,j = 1, 2, …, m ) سپس احتمال انتقال را می توان توصیف کرد. مانند:
که در آن A t i مساحت کاربری نوع i در زمان t است ، و ∆ A ij مساحت تغییر یافته از زمان t به زمان t +1 است، سپس حالت کاربری زمین i به j تبدیل می شود . از آنجایی که در طول فرآیند تغییر کاربری زمین، m نوع حالت ممکن وجود دارد ، ماتریس احتمال انتقال به صورت زیر نمایش داده می شود:
که در آن 0 ≦ Pij ≦ 1 و نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونت. بنابراین، در زمان t + 1، مساحت کاربری اراضی نوع k را می توان به صورت زیر توصیف کرد:
2.3.4. الگوریتم تخصیص رقابت کاربری زمین با هدف چندگانه
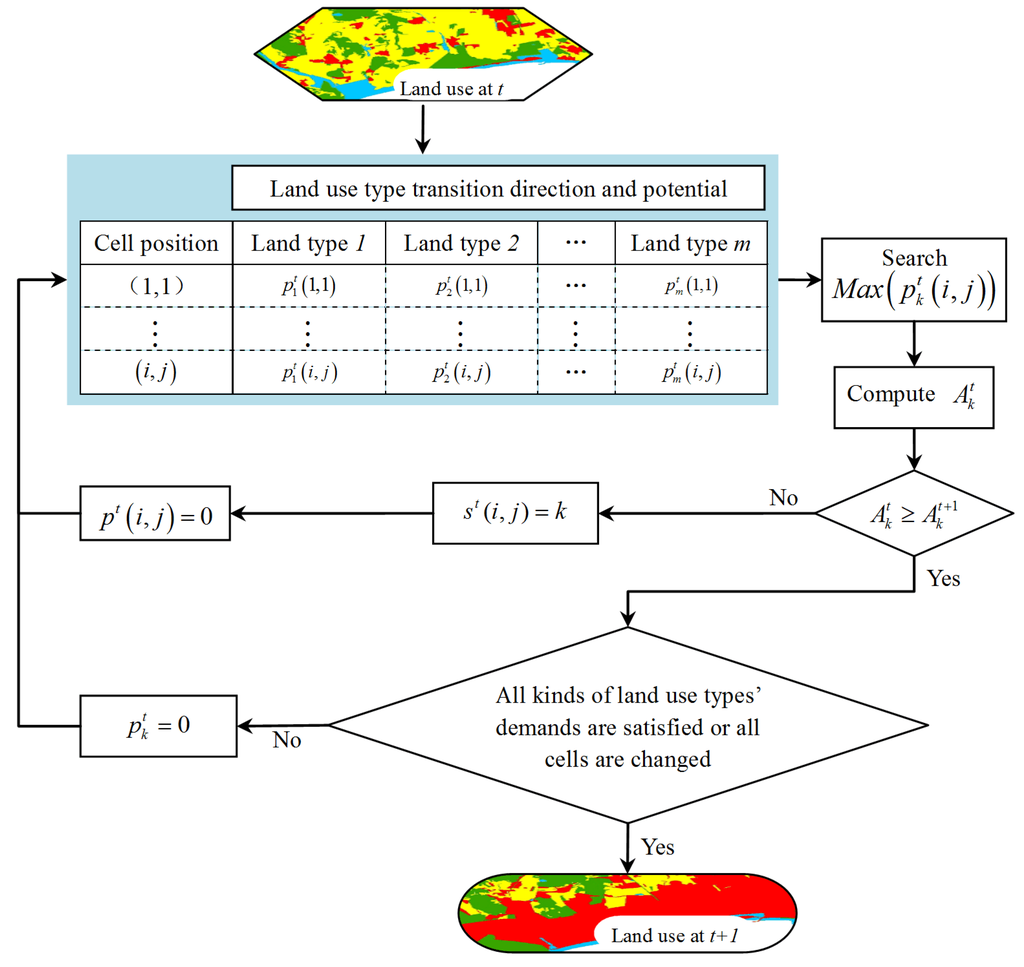
پتانسیل انتقال کاربری زمین مکان و جهت احتمالی تغییر حالت کاربری زمین را تعیین می کند. انواع مختلف تقاضاهای کاربری زمین، کمیت تغییرات کاربری زمین را تعیین می کرد و این دو با هم کار کردند تا الگوی کاربری نهایی را تعیین کنند. در اکثر مدلها، یک سیستم مبتنی بر قانون برای تخصیص تغییرات کاربری واقعی بر اساس نقشه تناسب، از جمله استفاده از آستانه برای انتخاب مکانهایی با بالاترین تناسب، یا شبیهسازی رقابت کاربری زمین بر اساس نوع کاربری خاص استفاده میشود. ویژگی ها [ 26 ]. با فرض وجود m نوع از انواع کاربری اراضی، از شکل 3 و معادله (3) می توان تعیین کرد که m وجود دارد.انواع احتمالات انتقال و پتانسیل های متناظر برای سلول (i,j ) در زمان t . یک روش ساده مقایسه پتانسیلهای انتقال m و انواع کاربریهای زمین با بالاترین پتانسیل با تغییر جهت کاربری زمین برای سلول (i,j). با این حال، این منجر به پدیده انفجار از نوع کاربری غالب خواهد شد. در این مطالعه، یک الگوریتم تخصیص رقابت کاربری زمین با چند هدف با پتانسیل انتقال کاربری زمین به عنوان پایه و تقاضای کاربری زمین به عنوان یک محدودیت ساخته شد. در فرآیند شبیه سازی توانسته است نیازهای انواع کاربری های مختلف زمین در مکان ها و مقادیر مکانی را برآورده کند. این الگوریتم یک مکانیسم تخصیص مبتنی بر انواع دستهبندی زمین به عنوان شبیهسازی اولیه بود که میتوانست تغییرات کاربری متعدد زمین را شبیهسازی کند. در شکل 3 ، نمودار جریان الگوریتم تخصیص رقابت کاربری اراضی چند هدفه دیده می شود که به چهار مرحله تقسیم شده است: (1) سلولی را جستجو کنید که حداکثر مقدار پتانسیل انتقال را دارد. نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتدر نقشه کاربری، موقعیت (i,j ) و تغییر جهت کاربری اراضی را ثبت کنید . (2) مساحت کاربری زمین نوع k را محاسبه کنیدنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونت; (3) مقایسه کنید نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتو مساحت تقاضای کاربری زمین نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتپیش بینی شده توسط مدل مارکوف، اگر نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتبیش از یا مساوی است نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونت، به مرحله چهار بروید؛ در غیر این صورت وضعیت کاربری زمین را تغییر دهید نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتاز سلول (i,j ) به k ، پتانسیل را تنظیم کنید نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتاز سلول (i,j ) به عنوان صفر، پتانسیل دیگر سلول (i,j ) را کنار بگذارید، سپس به مرحله یک برگردید. (4) اگر انواع درخواستهای کاربری اراضی برآورده شود، یا تمام سلولها تغییر کنند، سپس تخصیص را متوقف کنیم، نقشه کاربری زمین شبیهسازی شده را در زمان t +1 بدست خواهیم آورد. در غیر این صورت، پتانسیل انتقال تمام سلول ها را تنظیم می کنیم نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتبرای استفاده از زمین k به عنوان صفر، امکان تبدیل سلول های دیگر به کاربری زمین k را رها کنید ، سپس به مرحله یک برگردید.
2.3.5. ساختار مدل LLUC-CA
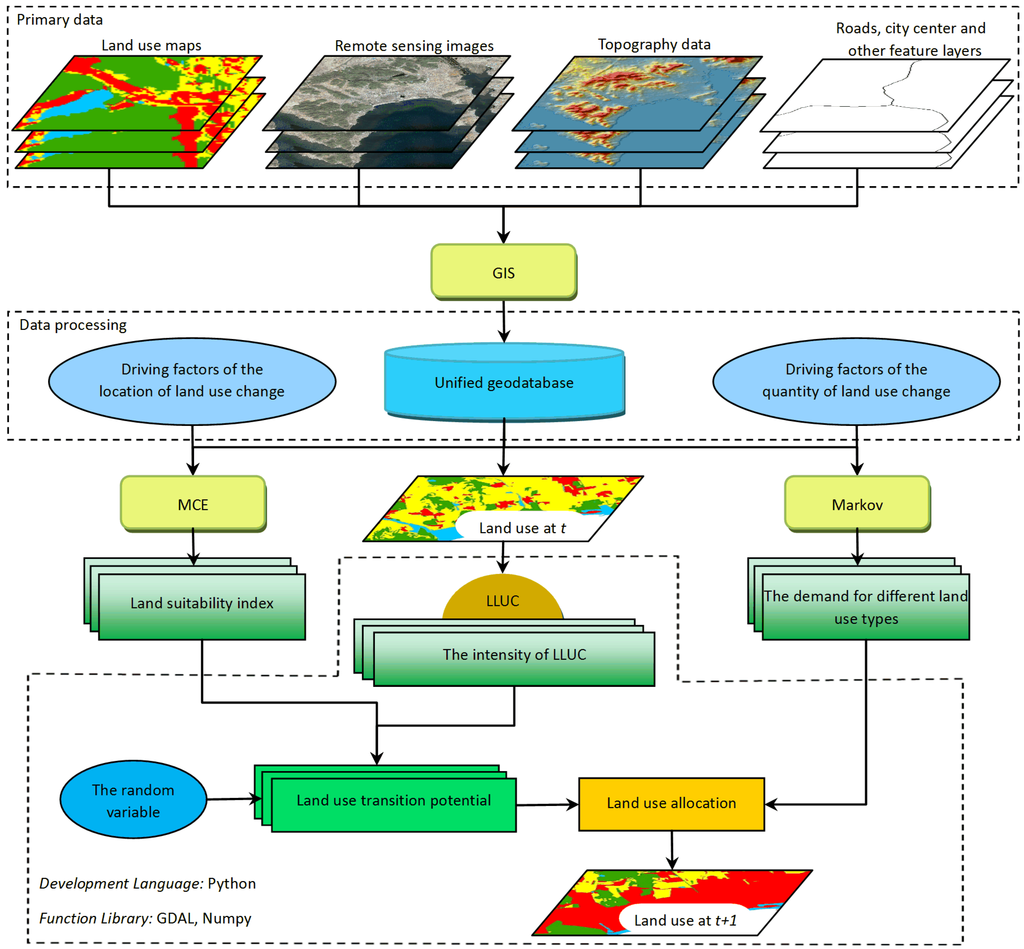
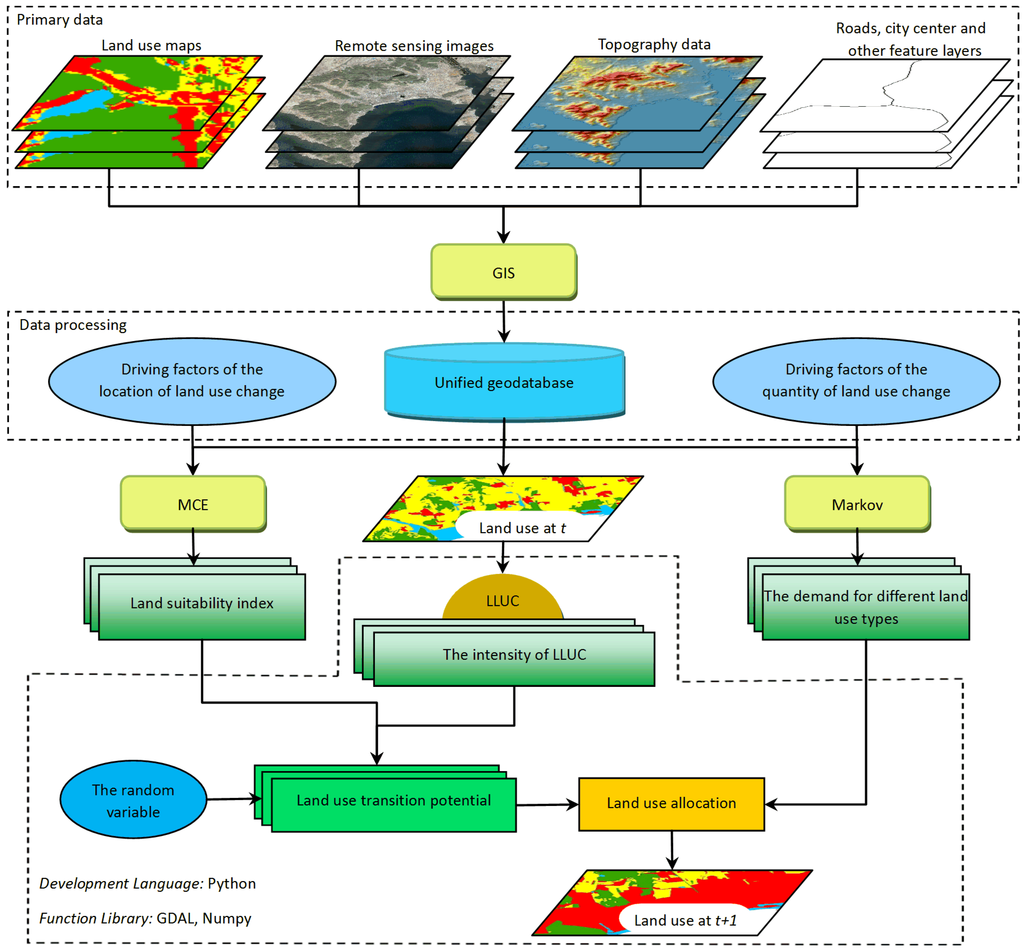
شکل 4ساختار مدل اتوماتای سلولی رقابت محلی استفاده از زمین (LLUC-CA) است. CA با مدل مارکوف برای کنترل کمیت انتقال در هنگام همراه شدن با GIS ترکیب شد و قوانین محلی برای شبیهسازی الگوهای جهانی و پیچیده کاربری زمین استفاده شد. این مدل ساختار ضعیفی را اتخاذ کرد و برنامههای GIS، MCE، Markov و CA به طور مستقل اجرا میشوند و اطلاعات را از طریق فایلهای داده مبادله میکنند. ورودی، تبدیل و تحلیل مکانی دادههای مکانی در نرمافزار GIS انجام شد، دادهها از پایگاه داده GIS استخراج و سپس برای پردازش وارد برنامههای MCE، Markov و CA شدند. سپس نتایج محاسبات برای نمایش و پردازش بیشتر به GIS منتقل شد. مدل LLUC-CA شامل سه مرحله به شرح زیر است: پیش پردازش و ورودی داده، تنظیم و تولید پارامتر، و تصمیم گیری در مورد تغییرات نوع کاربری و خروجی. در مرحله اول از نرم افزارهای ArcGIS، ERDAS، IDRISI و سایر نرم افزارها برای پردازش نقشه کاربری اراضی، تصاویر سنجش از دور، توپوگرافی و داده های برنامه ریزی و همچنین ایجاد پایگاه اطلاعاتی جامع جغرافیایی استفاده شد که در آن داده ها ساختار سازگار بود، و مرجع فضایی یکپارچه بود. در مرحله دوم، پارامترهای مورد نیاز برای LLUC-CA به دست آمد، که شامل: شاخص شدت رقابت کاربری زمین تحت تاثیر رقابت کاربری محلی در مقیاس یک محله سلولی. شاخص تناسب زمین توسط MCE تحت تأثیر عوامل محرک کلان کاربری زمین محاسبه شده است. و تقاضای منطقه برای انواع مختلف کاربری زمین پیش بینی شده توسط مدل مارکوف. در مرحله آخر، بر اساس پتانسیل انتقال کاربری اراضی، که با شدت رقابت کاربری محلی، مناسب بودن زمین و متغیرهای تصادفی، و تقاضاهای مختلف محدودیت کاربری زمین محاسبه شد، تغییر نوع کاربری اراضی هر سلول با یک الگوریتم تخصیص رقابت کاربری زمین با چند هدف تعیین شد. نمونه اولیه LLUC-CA در محیط توسعه یکپارچه Visual Studio 2010 پیاده سازی شد و زبان برنامه پایتون بود. از توابع کتابخانه GDAL و Numpy نیز استفاده شد. و زبان برنامه پایتون بود. از توابع کتابخانه GDAL و Numpy نیز استفاده شد. و زبان برنامه پایتون بود. از توابع کتابخانه GDAL و Numpy نیز استفاده شد.
2.4. پارامترهای مدل آماده سازی و پیاده سازی
علاوه بر نقشه اصلی کاربری واقعی، پارامترهای زیر نیز برای اجرای مدل LLUC-CA در منطقه مورد مطالعه باید تهیه میشد: محاسبه نقشههای تناسب زمین بر اساس روش MCE، و محاسبه ماتریس انتقال با استفاده از تحلیل زنجیره مارکوف.
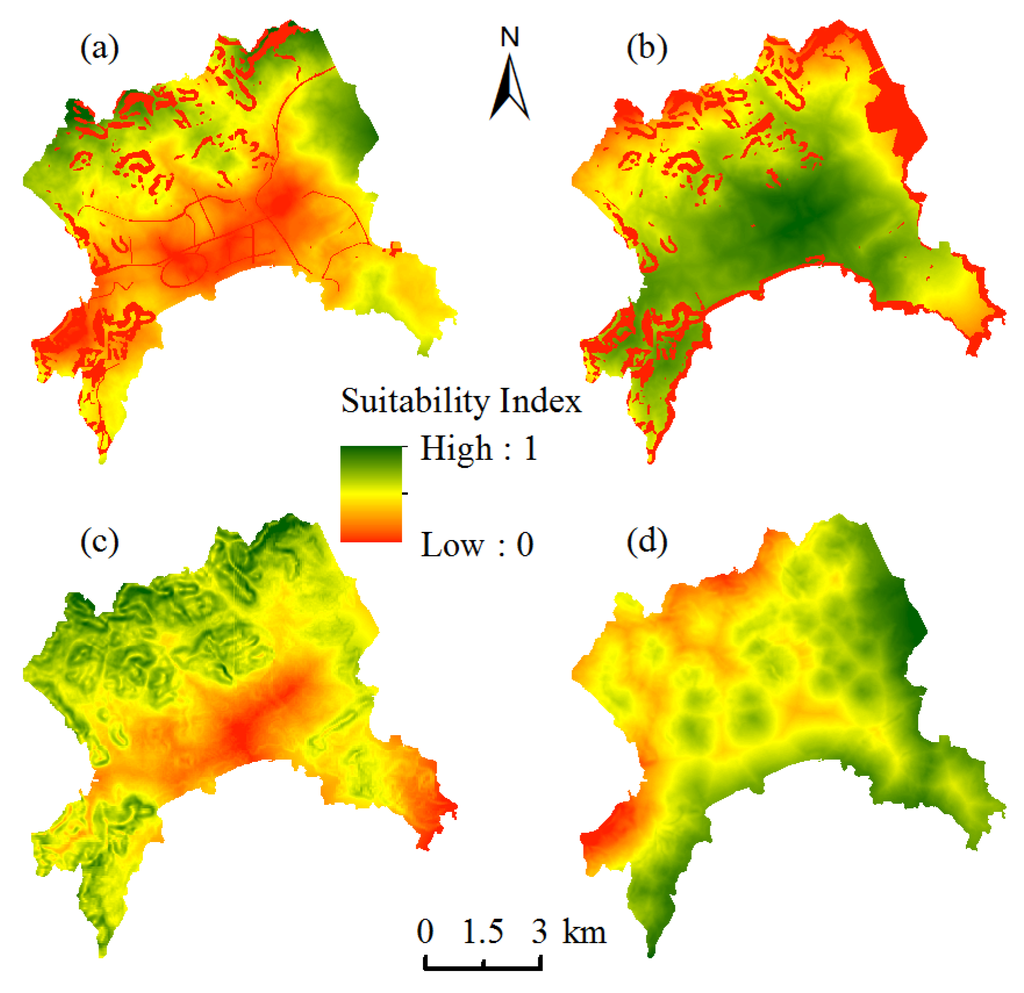
این مطالعه تأثیرات وضعیت کاربری فعلی، مراکز شهرها، جادههای اصلی، راهآهن سبک، خط ساحلی و تنظیم توپوگرافی و فضایی زمین ساختوساز بر اساس ویژگیهای بیوفیزیکی و اجتماعی-اقتصادی را بر تغییرات کاربری زمین در نظر گرفت. هدف از محاسبه نقشه های تناسب برای زمین کشاورزی، زمین ساختمانی، جنگل و آب است. در این میان، نمرات پنج عامل اول به چهار نوع کاربری زمین با فاصله ارزیابی شد، داده های توپوگرافی بر اساس شیب بیان شد و نتایج استاندارد شد (مقادیر بین 0 تا 1). مناطق با شیب بیش از 25 درصد مجاز به کشت و ساخت و ساز نبود، زمین حمل و نقل مناسب برای کشت نبود. و مقررات فضایی زمین ساختمانی اجازه ساخت و ساز را نمی داد. این سه معیار، محدودیتهایی برای ارزیابی تناسب زمین بودند. یک روش یکپارچه ترکیبی از متخصصان حوزه و روش AHP برای به دست آوردن مقادیر اهمیت نسبی عوامل مؤثر در مناسب بودن زمین برای توسعه اتخاذ شد. نسبت سازگاری رضایت بخشی برای چهار نوع کاربری زمین به دست آمد (جدول 2 ). متعاقباً با توجه به معادله (3) و تصاویر معیارهای استاندارد شده، نقشه های مناسب برای سال 2003 با استفاده از روش MCE محاسبه شد ( شکل 5 ).
تحلیل زنجیره مارکوف برای محاسبه ماتریس احتمالات انتقال بر اساس نقشه های کاربری واقعی زمین از سال 1988 تا 2003 استفاده شد و سپس از معادله (6) برای محاسبه تقاضای انواع کاربری های مختلف زمین برای سال 2012 استفاده شد (جدول 3 ) .
سه مجموعه داده (1) نقشه کاربری واقعی 2003؛ (2) نقشه های تناسب زمین در سال 2003؛ و (3) منطقه تقاضا برای سال 2012) قبل از اجرای برنامه وارد مدل LLUC-CA شدند. پس از کالیبره شدن تمام پارامترهای اساسی مورد نیاز (درباره جزئیات کالیبراسیون مدل، لطفاً به مرجع [ 40 ] مراجعه کنید) و پیکربندی شد، برنامه شبیه سازی LLUC-CA آغاز شد. در طول فرآیند شبیه سازی، برنامه ابتدا شاخص شدت رقابت کاربری محلی را تولید کرد و سپس پتانسیل انتقال کاربری زمین را برای هر سلول تولید کرد که با شاخص تناسب زمین توسط رابطه (3) ادغام شده بود. نقشه شبیه سازی شده از سال 2012 با الگوریتم تخصیص رقابت کاربری اراضی چند هدفه، با توجه به تقاضای کاربری زمین محاسبه شد.
3. نتایج و بحث
3.1. تجزیه و تحلیل کاربری زمین/تغییرات پوشش
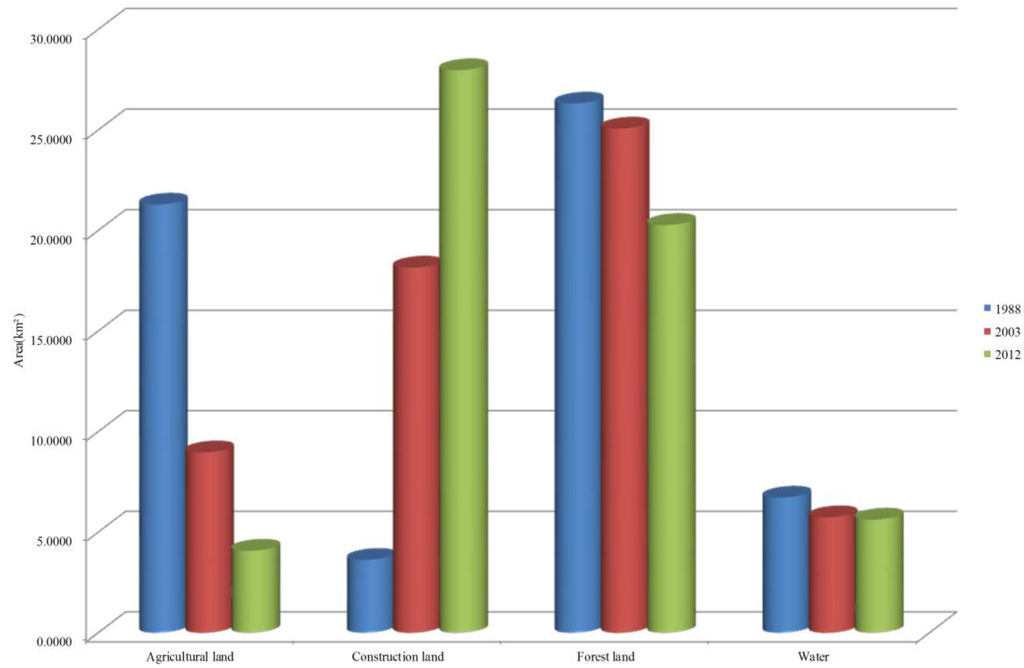
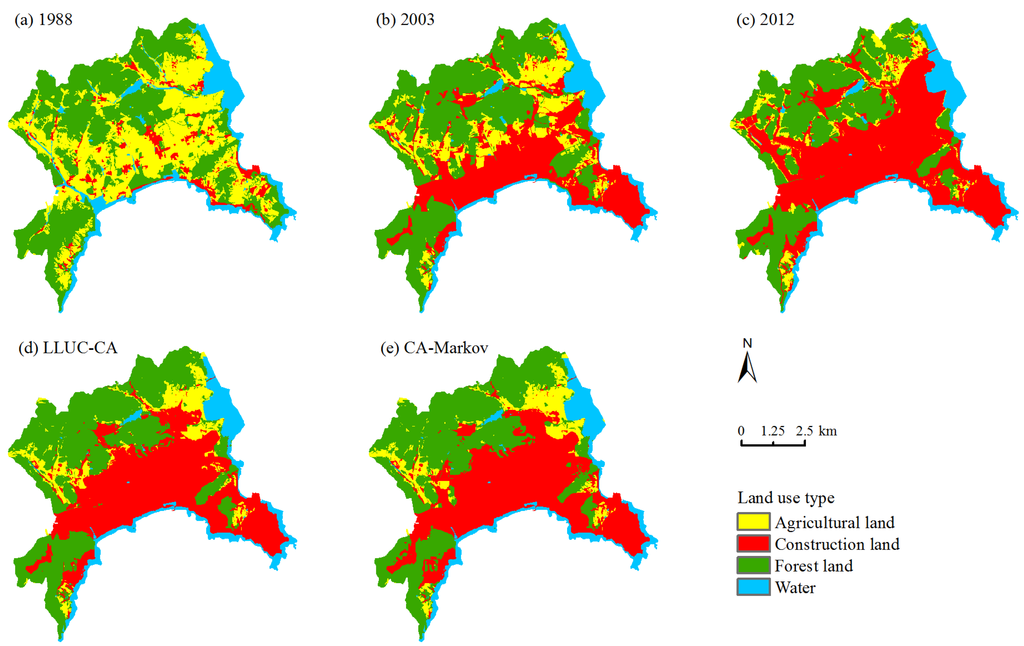
پوشش کاربری زمین جینشیتان از سال 1988 تا 2012 بسیار توسعه یافت، از نقطه منظره ملی تا ژئوپارک ملی و سپس به منطقه گردشگری 5A. روند کلی رشد سریع زمین های ساخت و ساز، و کاهش مستمر زمین های کشاورزی و جنگل ها بود، با کاهش اندکی آب، و سپس تسطیح ( شکل 6 و شکل 7 a-c). از این ارقام می توان دریافت که مساحت زمین کشاورزی در سال 1988 21.29 کیلومتر مربع بوده و در سال 2003 به 8.97 کیلومتر مربع کاهش یافته است که در 15 سال کاهش 57 درصدی داشته و سپس در سال 2012 به 4.08 کیلومتر مربع کاهش یافته است. زمین ساخت و ساز رشد سریعی را تجربه کرد، از 3.62 کیلومتر مربع به 18.16 کیلومتر2 ، افزایش چهار برابری در 15 سال، که منجر به مساحت کل زمین 27.97 کیلومتر مربع در سال 2012 شد. در همان زمان، کاهش زمین های جنگلی نسبتاً اندک بود و از 26.32 کیلومتر مربع به 20.28 کیلومتر مربع در 25 کاهش یافت. دوره -سال و سطح آب ثابت باقی ماند. نتایج نشان داد که افزایش زمین ساخت و ساز به قیمت انتقال از یک زمین کشاورزی بزرگ و همچنین مقداری مساحت جنگلی بوده است. این انتقال در ماتریس احتمال در جدول 3 منعکس شده استاز سال 2003 تا 2012، که نشان می دهد ممکن است 37.83 درصد از زمین های کشاورزی به زمین های ساختمانی تبدیل شده و 12.71 درصد به زمین های جنگلی تبدیل شود. 15.74 درصد از زمین های جنگلی به زمین های ساختمانی تبدیل می شود. و 8.61 درصد آب به زمین ساختمانی تبدیل می شود. در عین حال، 9.43 درصد از زمین های ساختمانی به جنگل تبدیل می شود و تبدیل متقابل بین انواع کاربری های زمین کمتر است.
3.2. اعتبار سنجی مدل
برای اعتبارسنجی مدل، نقشه کاربری واقعی زمین برای سال 2012 و نقشه کاربری زمین شبیه سازی شده LLUC-CA با هم مقایسه شدند ( شکل 7 c,d). نقشه کاربری کلی شبیهسازی شده از نظر مقایسه بصری، بهویژه در بخشهای میانی و جنوبی منطقه بسیار شبیه به نقشه واقعی بود. نتایج شبیهسازی زمین جنگلی و آب هم از نظر چیدمان مکانی و هم از نظر کمی به نقشه کاربری واقعی بسیار نزدیک بود و مساحت آب واقعی 5.63 کیلومتر مربع بود، در حالی که مساحت شبیهسازی به 5.32 کیلومتر مربع رسید.. این نتایج نشان داد که مدل به طور موثر منطقه را برای هر نوع کاربری زمین در شبیهسازی تغییر کاربری زمین بازتولید میکند. انحراف اصلی در نواحی شمالی بود، جایی که زمین های ساخت و ساز مناطق شمال غرب و شمال شرق در اطراف زمین کشاورزی پراکنده بودند و مساحت زمین کشاورزی واقعی 4.08 کیلومتر مربع بود، در حالی که منطقه شبیه سازی به 5.56 کیلومتر مربع رسید . فن و همکاران (2013) تحقیقات مرتبطی را در جینشیتان از منظر الگوی منظر کاربری اراضی توریستی انجام داد که با این مطالعه از دیدگاه الگوهای کاربری زمین نیز سازگاری بالایی داشت [41 ] .
به منظور بررسی بیشتر اثرات بهبود مدل LLUC-CA، یک مطالعه تطبیقی با استفاده از مدل CA-Markov انجام شد و نقشههای تناسب مورد استفاده یکسان بودند. نتایج شبیه سازی CA-Markov در شکل 7 e نشان داده شده است، و بسیار شبیه به آنچه در شکل 7 نشان داده شده است.د با این حال، شبیه سازی ساخت و ساز و زمین کشاورزی در شمال شرقی و جنوب غربی، جایی که منطقه رشد بیش از حد بزرگ بود و موقعیت شبیه سازی نادرست بود، ضعیف تر بود. برای اعتبار سنجی کمی دقت مدل، نقشه کاربری واقعی و نقشه کاربری زمین شبیه سازی شده بر اساس ضریب کاپا تایید شد. ضرایب کاپا LLUC-CA به ترتیب 64.46، 77.21، 85.30 درصد و 99.14 درصد برای زمین کشاورزی، زمین ساختمانی و جنگل، و آب بود. موفقیت کلی شبیهسازی 88.74 درصد بود که به این معنی بود که برای اکثر مکانهای فضایی انواع کاربریهای زمین، مدل LLUC-CA شبیهسازیهای درستی را بهویژه برای شبیهسازی جنگل و آب انجام داد. از سوی دیگر، ضریب کاپا CA-Markov برای زمین کشاورزی 61.54، 74.62، 85.12 درصد و 99.13 درصد بود. زمین های ساخت و ساز و زمین های جنگلی و آب به ترتیب، و موفقیت کلی شبیه سازی 86.82 درصد بود که نشان داد دقت مکانی نقشه کاربری زمین شبیه سازی شده با استفاده از مدل LLUC-CA بیشتر از مدل CA-Markov بود. در نتیجه، مدل LLUC-CA می تواند به طور بالقوه برای شبیه سازی تغییر پوشش کاربری زمین در مقیاس بزرگ استفاده شود.
4. نتیجه گیری
LUCC یک سیستم پیچیده غول پیکر است و CA ابزار مهمی است که برای شبیه سازی سیستم های پیچیده مناسب است. از یک سو، در سالهای اخیر، تحقیقات عمدتاً بر روی استفاده از روشهای هوش مصنوعی برای به دست آوردن قوانین انتقال به منظور بهبود کیفیت شبیهسازی متمرکز شده است. با این حال، روشهای هوش مصنوعی متعلق به مدل جعبه سیاه هستند و تعیین قاعده پنهان در تغییر الگوی فضایی آسان نیست. از سوی دیگر، در همه انواع مدلهای توسعهیافته CA، بدون استفاده از الگوریتمهای هوش مصنوعی، اکثر آنها تنها میتوانند یک نوع کاربری زمین هدف را شبیهسازی کنند، بدون اینکه امکان شبیهسازی کاربری اراضی با چند هدف را به طور همزمان داشته باشند و تجزیه و تحلیل جامع کشف کنند. رابطه بین انواع کاربری زمین ضعیف است. مدل های کاربری منطقه ای موجود،14 ]، در حالی که در این مطالعه، هدف مطالعه نه تنها در یک منطقه کوچک در مقیاس بود، بلکه بر روش تحقیق قوانین انتقال سلول LLUC-CA در داخل همسایگی نیز تأکید داشت.
در این مطالعه، یک مدل CA جدید رقابت کاربری محلی معرفی شد که مزایای مدلها را بر اساس خلاصهسازی تحقیقات قبلی برای شبیهسازی تغییر کاربری اراضی یکپارچه میکند. به منظور کشف مکانیسم تعامل بین انواع مختلف کاربری زمین، و پاسخگویی به نیازهای بیشتر انواع زمین شبیه سازی جامع، یک محله سلولی به عنوان یک واحد محلی در نظر گرفته شد. مکانیسم تعامل در یک محله سلولی مورد تجزیه و تحلیل قرار گرفت و تحقیق روش تجزیه و تحلیل رقابت کاربری زمین محلی تحت تأثیر شرایط خود سلول و توزیع نوع کاربری زمین در داخل محله مورد مطالعه قرار گرفت. این مطالعه بر تحقیق در مورد این روش جدید استفاده از رقابت استفاده از زمین محلی برای توسعه قوانین انتقال سلول متمرکز شده است. یک مدل CA از نوع کاربری چند زمینی را که معنای فیزیکی واضحی داشت بررسی کرد و یک روش آزمایش کامل را ایجاد کرد. علاوه بر این، پتانسیل انتقال کاربری اراضی تولید شده با ترکیب شاخص شدت رقابت کاربری محلی، که توسط تحلیل رقابت کاربری محلی محاسبه شد، شاخص تناسب زمین محاسبه شده با روش MCE، و متغیرهای تصادفی و تقاضاهای منطقه مختلف که توسط مدل مارکوف، توسط یک الگوریتم تخصیص رقابت کاربری زمین با چند هدف ادغام شد و به دنبال آن شبیهسازی تغییر کاربری زمین با چند هدف پیادهسازی شد. نتایج نشان داد که رقابت محلی استفاده از زمین میتواند بیان خوبی از خودهمبستگی فضایی را ارائه دهد و تحلیل زنجیره مارکوف به کنترل کمیت تغییر کاربری زمین کمک کرد. MCE نقشههای تناسب را به منظور کمک به کنترل توزیع فضایی تغییر کاربری زمین تولید کرد و الگوریتم تخصیص رقابت کاربری زمین با چند هدف، مکان و کمیت آخرین تغییر را تعیین کرد. نمونه اولیه این مدل توسط پایتون و GDAL برنامهریزی شد، که با استفاده از نقشههای کاربری زمین در سالهای 1988، 2003 و 2012 با موفقیت در شبیهسازی تغییر کاربری زمین جینشیتان اعمال شد. در مقایسه با نقشه شبیهسازی شده LLUC-CA، CA با شبیه سازی نقشه مارکف و نقشه کاربری واقعی، نتایج نشان داد که مدل از دقت شبیه سازی بالایی برخوردار است. در شبیه سازی، ضریب کاپا به ترتیب برای بخش کشاورزی، ساختمانی و جنگلی و آب به ترتیب 64.46، 77.21، 85.30 و 99.14 درصد بود. مدل پیشنهادی دقت بالایی در توزیع کمی و مکانی در شبیهسازی تغییرات کاربری اراضی نشان داد. این مدل توانایی خودسازماندهی فضایی قوی برای شبیهسازی تغییرات کاربری اراضی داشت و مزیت خاصی داشت که آن را به روشی مؤثر تبدیل کرد.
تغییر کاربری زمین یک فرآیند جغرافیایی بسیار پیچیده است. تحت تأثیر شرایط طبیعی و تأثیرات فرهنگی و همچنین عوامل سیاسی، برنامه ریزی، فناوری و بسیاری دیگر از عوامل اجتماعی-اقتصادی قرار دارد. در نتیجه، شبیهسازی و پیشبینی دقیق تغییر کاربری زمین همیشه دشوار است. مدل LLUC-CA پیشنهاد شده در این مطالعه میتواند به شبیهسازی تکامل جامع نوع کاربری چندگانه دست یابد و وضعیت و روند تغییرات کاربری زمین را پایش کند. می تواند روشی را برای تحلیل نیروهای محرک تغییر کاربری زمین، تحلیل و پیش بینی گسترش کاربری اراضی شهری و توسعه و حفاظت از زمین های کشاورزی، جنگل ها و آب ارائه دهد. همچنین می تواند داده های مهمی را برای کمک به برنامه ریزان، دولت و مردم در تصمیم گیری های آتی ارائه دهد. اگرچه مدل برهمکنش سلولی در همسایگی محلی و تأثیر عوامل محرکه و برنامه ریزی طبیعی کلان را در نظر می گیرد، تداوم و تغییرپذیری قوانین انتقال در بازه های زمانی مختلف و همچنین تأثیر عوامل سیاست، اقتصادی و جمعیتی بر کاربری زمین را در نظر می گیرد. شبیه سازی تغییر، هنوز به تحقیقات بیشتر نیاز دارد. علاوه بر این، در مطالعه پیگیری، تجزیه و تحلیل تقاضای منطقه کاربری باید علاوه بر استفاده از دادههای سالهای گذشته تغییرات کاربری، اضافه کردن برنامهریزی کاربریها را نیز در نظر بگیرد. ارزیابی تناسب زمین می تواند داده های اقتصادی و جمعیتی زیادی را اضافه کند و یک روش هوش مصنوعی می تواند برای تولید شاخص های شدت رقابت کاربری محلی معرفی شود. و همچنین تأثیر عوامل سیاسی، اقتصادی و جمعیتی بر شبیهسازی تغییر کاربری اراضی، هنوز به تحقیقات بیشتری نیاز دارد. علاوه بر این، در مطالعه پیگیری، تجزیه و تحلیل تقاضای منطقه کاربری باید علاوه بر استفاده از دادههای سالهای گذشته تغییرات کاربری، اضافه کردن برنامهریزی کاربریها را نیز در نظر بگیرد. ارزیابی تناسب زمین می تواند داده های اقتصادی و جمعیتی زیادی را اضافه کند و یک روش هوش مصنوعی می تواند برای تولید شاخص های شدت رقابت کاربری محلی معرفی شود. و همچنین تأثیر عوامل سیاسی، اقتصادی و جمعیتی بر شبیهسازی تغییر کاربری اراضی، هنوز به تحقیقات بیشتری نیاز دارد. علاوه بر این، در مطالعه پیگیری، تجزیه و تحلیل تقاضای منطقه کاربری باید علاوه بر استفاده از دادههای سالهای گذشته تغییرات کاربری، اضافه کردن برنامهریزی کاربریها را نیز در نظر بگیرد. ارزیابی تناسب زمین می تواند داده های اقتصادی و جمعیتی زیادی را اضافه کند و یک روش هوش مصنوعی می تواند برای تولید شاخص های شدت رقابت کاربری محلی معرفی شود. علاوه بر استفاده از داده های سال های گذشته تغییرات کاربری اراضی. ارزیابی تناسب زمین می تواند داده های اقتصادی و جمعیتی زیادی را اضافه کند و یک روش هوش مصنوعی می تواند برای تولید شاخص های شدت رقابت کاربری محلی معرفی شود. علاوه بر استفاده از داده های سال های گذشته تغییرات کاربری اراضی. ارزیابی تناسب زمین می تواند داده های اقتصادی و جمعیتی زیادی را اضافه کند و یک روش هوش مصنوعی می تواند برای تولید شاخص های شدت رقابت کاربری محلی معرفی شود.




بدون نظر