1. معرفی
متغیرهای زمین مانند شیب ها، انحناها و ساختارهای حوضه، پارامترهای اولیه برای کاربردها در هیدرولوژی، فرسایش خاک، آب خاک و بودجه کربن هستند [ 1 ، 2 ، 3 ، 4 ، 5 ]. در سالهای اخیر، مدلهای دیجیتال ارتفاع (DEMs) به رایجترین منبع دادههای زمین برای چنین کاربردهایی تبدیل شدهاند. با این حال، مقیاس دادههای موجود و مقیاسی که درک فرآیند و مدلسازی باید در آن اعمال شود، ممکن است همیشه مطابقت نداشته باشند. به عنوان مثال، به طور گسترده گزارش شده است که متغیرهای زمین به وضوح DEM مورد استفاده حساس هستند [ 6 ، 7]] و تأثیر وضوح بر متغیرهای زمین می تواند برای این کاربردها قابل توجه باشد. روابط بین تغییرات در متغیرهای زمین با وضوح DEM در نتیجه در سالهای اخیر به طور گسترده (اما عمدتاً تجربی) مورد تحقیق قرار گرفته است [ 8 ، 9 ، 10 ، 11 ]. زمانی که دادههای DEM موجود درشتتر از حد مورد نیاز هستند، مطالعه اثرات مقیاسگذاری و روشهای مقیاسگذاری مجدد برای دانستن اینکه چه وضوحی باید برای کاربردهای خاص انتخاب شود و اگر دادهای با وضوح مناسب در دسترس نباشد، چه باید کرد، مفید است. برخی از تلاشها در مورد چگونگی تغییر مقیاس تفکیکپذیریهای درشتتر برای تخمین پارامترهای زمین در رزولوشنهای ظریفتر انجام شده است [ 8 ، 12]]. با افزایش وضوح DEM های موجود، موضوع تطبیق DEM و مقیاس پردازش از اهمیت کمتری برخوردار نمی شود، زیرا مقیاس DEM نه تنها به وضوح سلول شبکه ای مربوط می شود، بلکه محتوای اطلاعاتی DEM تا بهترین مقیاس ها نیز توسط وضوح.
برای پیشبرد این حوزه تحقیقاتی، یافتن اینکه چگونه متغیرهای توپوگرافی تحت تأثیر مقیاس قرار می گیرند و چه نوع اطلاعاتی در فرآیند تولید یا تعمیم یک DEM از بین می روند مفید است. اگر بتوان این کار را انجام داد، مشروط بر اینکه بتوان ساختارهای فضایی زمین اولیه را که یک منطقه خاص را تشکیل میدهند نیز ایجاد کرد، ممکن است بتوان از دست دادن اطلاعات در این ساختارهای زمین را در (به عنوان مثال) افزایش مقیاس توصیف کرد. برعکس، ممکن است بتوان نوع زمین را از طریق تغییر اطلاعات با مقیاس مشخص کرد [ 13 ]. در این مقاله، نویسندگان با مدلسازی ساختارهای توپوگرافی در DEMها و تغییر در اطلاعات با درشتتر یا ریزتر شدن وضوح، گامی در این راه برداشتهاند. تجزیه و تحلیل زمین آماری [ 14 ]، روش های نیمه واریوگرام چند جزیی [15 ] و روش های تحلیلی مورد استفاده در تئوری خود همبستگی و منظم سازی در تصاویر دیجیتال [ 16 ، 17 ] ابزار اولیه در این مطالعه بودند. ابزارها با استفاده از روشهای پردازش تصویر دیجیتال [ 3 ] استفاده میشوند.
نیمه واریوگرام یک ابزار اساسی در تحلیل زمین آماری است. توسعه اولیه آن در برآورد منابع زمین شناسی بود و بعدها با یک پایه ریاضی و آماری قوی ارائه شد [ 18 ]. توسعه یافته است تا به یک ابزار ارزشمند در بسیاری از مطالعات مکانی جغرافیایی مانند مدلسازی سنجش از دور [ 16 ، 17 ]، پوشش زمین [ 19 ، 20 ، 21 ] و رطوبت خاک [ 22 ] تبدیل شود. تجزیه و تحلیل نیمه واریوگرام نیز به روش های مختلفی برای داده های توپوگرافی با موفقیت اعمال شده است. به عنوان مثال، برای انتخاب یک اندازه پیکسل مناسب برای DEM های درون یابی شده از داده های کانتور [ 23 ]، برای محاسبه بعد فراکتال یک DEM [ 23].24 ]، برای درونیابی با استفاده از روش های کریجینگ [ 25 ] و برای بررسی ساختارهای سطحی در مقیاس میکرو [ 26 ]. در این مقاله، نیمهواریوگرامها برای کشف ساختارهای توپوگرافی ارائهشده توسط DEM در مقیاسهای مختلف و کمک به توصیف مناظر از نظر ساختارهای توپوگرافی موجود در دادهها استفاده میشوند.
واضح است که فرآیندهای منظر دارای طیف وسیعی از مقیاسهای مشخصه هستند و معمولاً مدلسازی آنها توسط یک مدل نیمه واریوگرام (مجاز) که معمولاً تعریف شده است، آسان نیست (یا حتی ممکن است). این موضوع توسط الیور و دیگران در زمینه کاوش تصویر مورد بحث قرار گرفته است [ 21 ، 27 ]. در این مقاله، یک “مدل ساختارهای مستقل” (ISM)، که معمولا “مدل تودرتو” نامیده می شود، به عنوان مثال، [ 27]]، برای تحلیل کمی این مقیاس ها استفاده شده است. با استفاده از ISM، ساختارهای توپوگرافی را می توان شناسایی کرد و نحوه تغییر آنها با وضوح DEM را می توان از طریق تغییراتی که در اجزای ISM رخ می دهد با استفاده از روش های ارائه شده در این مقاله بررسی کرد. استفاده از اصطلاحات منطبق با Serra نشان می دهد که نام مدل های “تودرتو” توصیف مناسب تری برای یک مدل سلسله مراتبی است تا برای مجموع مولفه های نیمه واریوگرام های مستقل [ 28 ]. از این رو، اصطلاح “ISM” (بر اساس Serra [ 28 ]) در صفحات بعدی استفاده شده است.
این مقاله شکل مدل زمین آماری را که برای این کار مفیدتر است، تشریح می کند. سپس روشهای تحلیلی جدید و یک نتیجه کلی را توسعه میدهد که اجازه میدهد تا اثرات مقیاسبندی کمی مشخص شود. همچنین ابزارهایی را برای کمک به شناسایی مؤلفه ها و محاسبه روندها معرفی می کند و سپس ابزارها را با چند مثال عملی نشان می دهد. به طور خاص، در بخش 2 ، مواد مورد استفاده، از جمله اطلاعات پسزمینه و DEMها، تشریح شدهاند و روشهای ریاضی اعمالشده برای DEMها نیز در صورت نیاز تشریح شدهاند. در بخش 3روشها و مدلهای تحلیلی جدید توسعهیافته در اینجا برای استخراج یک ISM برای مجموعههای دادههای معمولی استفاده میشوند و نشان میدهند که چگونه میتواند نیمهواریوگرامهای DEMهای مختلف یک منطقه را در مقیاسهای مختلف با استفاده از یک مدل ISM زیربنایی مدلسازی کند. ابزاری به نام “Filter Bank” برای کمک به شناسایی بهترین اجزای منظر مدل ISM معرفی شده است و از تحلیل کریجینگ برای ایجاد تصاویری از اجزای مقیاس استفاده می شود. در بخش 4 ، برخی از مسائل پیش آمده مورد بحث قرار می گیرد. نتیجه گیری در بخش 5 آورده شده است. این مقاله نشان میدهد که چگونه وقتی وضوح DEM درشتتر میشود (در این مورد از 2.5 متر و 25 متر)، اجزای جزئی بیشتر تحتتاثیر تغییر مقیاس قرار میگیرند تا ویژگیهای مقیاس وسیعتر. در مثال انتخاب شده، برای ساختارهای توپوگرافی در محدوده 70 متر، واریانس مرتبط با مولفه 31.1٪ کاهش یافت. واریانس سازه های توپوگرافی بزرگتر از 70 متر بسیار کمتر کاهش یافت و سازه های بالای 1500 متر اصلاً کاهش یافت. نتایج این مقاله به درک فرآیند ارتقاء مقیاس در تجزیه و تحلیل توپوگرافیک کمک می کند، ابزارهایی را ارائه می دهد که با آن اجزای مقیاس یک DEM را مدل می کنند و به تعریف وضوح DEM مناسب برای مطابقت با برنامه ها کمک می کند.
2. مواد و روشها
2.1. منطقه مطالعه
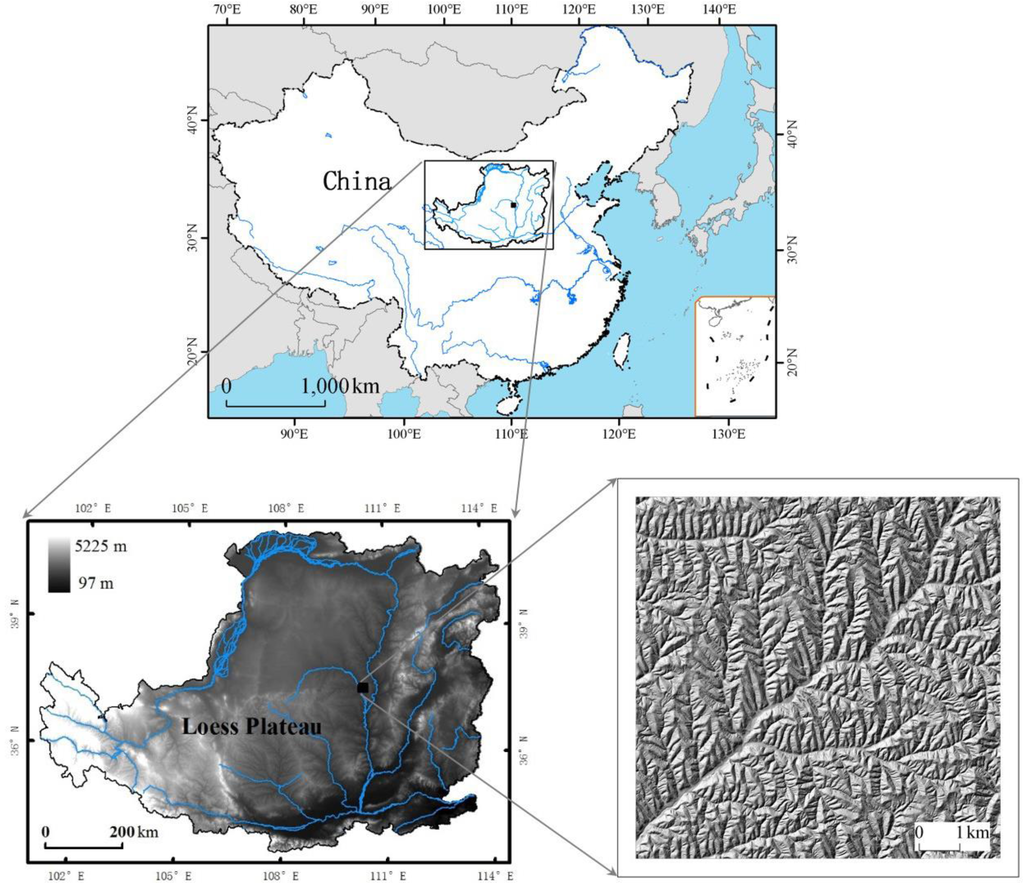
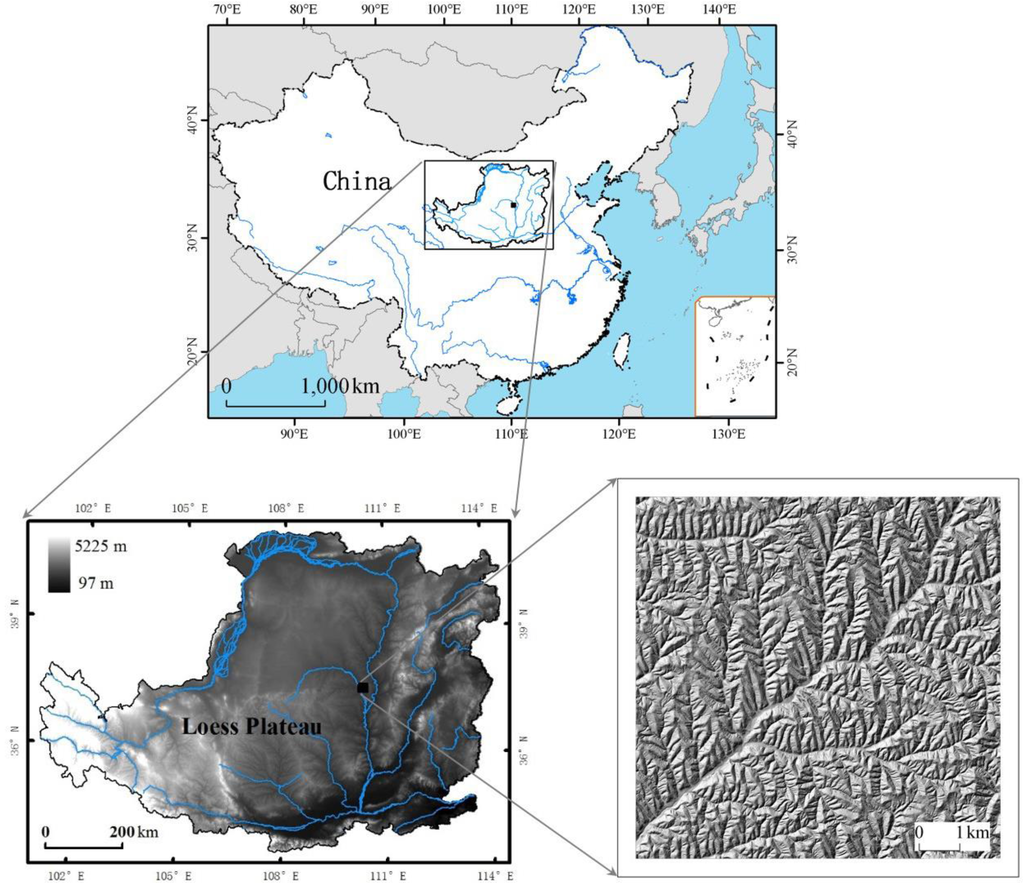
منطقه مورد مطالعه در منطقه Loess Hillly-Gully در فلات Loess (LP) واقع شده است. مربعی به ضلع 8.1 کیلومتر است. حوضه آبخیز قابل توجهی به نام حوضه آبخیز جیو یوان وجود دارد که از این منطقه مورد مطالعه در جهت شمال شرقی – جنوب غربی عبور می کند. این یک منطقه معمولی تپه ای لس با سطح زمین پیچیده و فرسایش شدید خاک است. این نوع منطقه دارای زمین های پیچیده با خندق های زیاد، شیب های تند و طول شیب کوتاه است. موقعیت و پیچیدگی سطح زمین همانطور که در شکل 1 نشان داده شده است .
2.2. مجموعه داده های منبع
در این مقاله از نقشه توپوگرافی با مقیاس نقشه 1:10000 به عنوان داده های پایه استفاده شده است. این از نظرسنجیهای مبتنی بر عکسبرداری هوایی استخراج شد و از امکانات بهروز شده نقشهبرداری در دهه 1990 توسط دولت چین استفاده کرد. بر اساس نقشه توپوگرافی 1:10000، DEM با وضوح 2.5 متر و 25 متر با استفاده از نرم افزار ANUDEM5.3 توسعه یافته توسط Hutchinson [ 29 ، 30] ساخته شد.]. در این مقاله به طور خلاصه به آنها DEM2.5 و DEM25 اشاره شده است. این دو مثال در اینجا مورد استفاده قرار می گیرند تا نشان دهند که روش ها همانطور که تئوری پیش بینی می کند کار می کنند و برخی از کاربردهای فعلی و آینده در بخش بحث ارائه شده است. مجموعه داده های ورودی به نرم افزار ANUDEM شامل خطوط، ارتفاعات نقطه ای، نهرها و دریاچه ها است. کانتورها داده های اولیه و جریمه انحنای بیش از حد پروفیل 0.7 (بالا) در تنظیمات نرم افزار ANUDEM بود. پیش بینی رایج برای همه داده ها، گاوس کروگر بر اساس داده کراسوفسکی 1940 است که معمولاً در چین استفاده می شود. شکل و اندازه سلول های شبکه همه مربع و بر حسب متر است. منطقه مورد مطالعه اولیه در یک مستطیل به ابعاد 8.1 کیلومتر قرار دارد. یک فاصله بافر 500 متر برای همه داده ها به منظور کاهش اثرات لبه اعمال شد. به این معنا که،
توجه به این نکته مهم است که دادههای DEM توسعهیافته و مورد استفاده در اینجا با دادههایی که بهطور سنتی توسط زمینآمار در زمینشناسی و اکولوژی تجزیه و تحلیل میشوند، متفاوت است. آنها نمونه های نقطه ای نیستند بلکه نتیجه پردازش اشکال مختلف داده ها در شبکه های متراکم هستند. پیش پردازش بر ماهیت رویکرد پس پردازش تأثیر می گذارد زیرا داده های سنجش از راه دور و DEM های تولید شده توسط فتوگرامتری دیجیتال، داده های Lidar و داده های رادار را انجام می دهد. دادهها معمولاً فایلهای داده عظیمی را تشکیل میدهند که پردازش تصویر راهی مهم برای تجزیه و تحلیل آنها است. با این حال، ابزارهای زمین آمار را می توان با موفقیت برای مدیریت این نوع داده ها تعمیم داد [ 21 ].
2.3. آمار نیمه واریوگرام
تنوع در خواص مکانی، از جمله در DEM ها، می تواند با استفاده از نظریه و روش های زمین آمار توصیف شود [ 31 ]. نیمه واریوگرام ابزار مرکزی تحلیل زمین آماری است. همبستگی فضایی بین مکانها را بر اساس این اصل اندازهگیری میکند که یک ویژگی فضایی در مکانهای نزدیک به احتمال زیاد مشابه است تا در مکانهای دور [ 31 ] و اینکه شباهت را میتوان با استفاده از ویژگیهای توابع تصادفی مکانی مدلسازی کرد.
فرمول کلی که در اینجا برای محاسبه نیمه واریوگرام استفاده می شود γ�، برای عملکرد فضایی (1 بعدی یا 2 بعدی). ZZدر یک فاصله معین hℎ[ 31 ] عبارت است از:
جایی که γ ( h )�(ℎ)نیمه واریوگرام است. ایکسمن��محل یک نقطه خاص است. ز (ایکسمن)Z(��)و ز (ایکسمن+ h )Z(��+ℎ)مقادیر مشاهده شده Z در مکان ها هستند ایکسمن��و ایکسمن+ h��+ℎ; برای داده های دو بعدی، ساعتℎیک بردار با جهت و فاصله است که به طور کلی به عنوان تاخیر شناخته می شود. ن( h )�(ℎ)تعداد جفت نقاط با فاصله جدایی (یا تاخیر) است ساعتℎ. مقادیر نیمه متغیری که با تغییر به دست می آید ساعتℎنیم واریوگرام تجربی را می سازند که گاهی اوقات “نیمه واریانس” نامیده می شود.
در این فرمول، یک سطح DEM به عنوان تحقق یک تابع دو بعدی تصادفی مدلسازی میشود Z ( x ، y)Z(�,�)که حداقل در افزایش ها ثابت فرض می شود [ 14 ] و در بیشتر موارد نیز قابل تمایز فرض می شود. نیمه واریوگرام دو بعدی برای Z ( x ، y)Z(�,�)بر حسب افزایش در تعریف شده است ایکس�و y�جهت ها. به این معنا که:
در یک تصویر DEM، مختصات شبکه فضایی با مقادیر سطر و ستون تعریف می شود. بنابراین، افزایشها (یعنی تأخیرها) در جهتهای x و y نیز میتوانند با افزایش واحدهای پیکسل (یا سلول شبکه) در جهتهای سطر و ستون تعریف شوند. نتیجه در این مورد یک تصویر نیمه واریوگرام 2 بعدی است که مجموعه اطلاعات اولیه برای داده های تصویر دو بعدی است.
به دلایل عملی، با استفاده از این واقعیت که نیمه متغیر یک تابع زوج است (یعنی مورب متقارن) ( γ ( – h ) = γ ( h )�(−ℎ)=�(ℎ)) محاسبه نیمه واریوگرام ها را فقط در چهار جهت تغییر اولیه راحت می کند. چهار جهت را می توان شرق-غرب (EW)، شمال-جنوب (NS)، شمال شرقی-جنوب غربی (NE-SW) و شمال غربی-جنوب شرقی (NW-SE) نشان داد. جهتهای مورب به پلههای شعاعی مساوی با طول پلهها در جهتهای مربع درونیابی میشوند، به طوری که تاخیرها در گامهای شعاعی هستند. میانگین این نیمه متغیرها در چهار جهت تخمین خوبی برای میانگین کلی نیمه متغیر شعاعی است زیرا به دلیل تقارنها. این همان محاسبه میانگین هشت جهت شعاعی اصلی است.
میانگین کلی نیمه واریوگرام شعاعی به ویژه برای این کار مفید است زیرا نیمه متغیرهای تجربی از مناطق کوچک اغلب حاوی ناهمسانگردی جهت موضعی و سوگیری به دلیل جهت گیری محلی خاص ویژگی های زمین یا روندهای منطقه ای هستند. مشخص کردن زمین برای تجزیه و تحلیل مقیاس به دنبال مستقل بودن از این عوامل جهتی محلی است و نیمه واریوگرام میانگین شعاعی یک اندازه گیری اطلاعات مفید “غیر متغیر چرخش” را ارائه می دهد. با استفاده از این اطلاعات میانگین شعاعی، آمار نیمه واریوگرام برای کاوش اطلاعات مکانی ثابت چرخش در Hc-DEMs با وضوحهای متفاوت استفاده شده است.
یک نیمه واریوگرام تجربی اغلب بر حسب دو پارامتر مشتق شده اساسی توصیف می شود. اینها هستند R a n gه�����(فاصله ای که بعد از آن مقادیر دیگر همبستگی ندارند) و اسمن _ _����(مقدار نیمه واریوگرام در فواصل بیشتر از محدوده). برای نیمهواریوگرامهای تجربی، روشهای مستقیمی مانند آنچه در [ 13 ] توضیح داده شد، میتواند برای تخمین محدوده کلی و پارامترهای آستانه به عنوان بخشی از کاوش دادههای عمومی استفاده شود. هنگامی که نیمه واریوگرام “ایستا در افزایش” است، افزایش ( ز( x +ساعتx _y+ساعتy) –Z( x ، y)�(�+ℎ�,�+ℎ�)−�(�,�)) در معادله (2) در ثابت هستند ( x ، y)(�,�)برای داده شده است (ساعتx _ساعتy)(ℎ�,ℎ�). به طور کلی، این مربوط به رسیدن نیم واریوگرام به آستانه است، اما ممکن است آستانه در محدوده داده رخ ندهد.
برای انواع سطح مورد استفاده در این مقاله، واریانس محدود است و ساختار فضایی را می توان به طور معادل با یک تابع کوواریانس تعریف کرد. سی( h )�(ℎ)جایی که:
با در نظر گرفتن مسائلی مانند روندها (به بعد مراجعه کنید)، رابطه بین نیمه متغیر و تابع کوواریانس مناسب برای DEM ها را می توان به صورت زیر نوشت:
C(0)�(0)واریانس یا آستانه داده است. از این رابطه بیشتر در بخشهای بعدی استفاده میشود، جایی که به منظور مدلسازی نیمهواریوگرام میانگین شعاعی از توابع واریوگرام متقارن شعاعی و کوواریانس استفاده خواهیم کرد. استفاده از این مدل تمایل دارد به شکل قویتری از ایستایی نسبت به ثابت در افزایشها دلالت کند که اغلب برای نیمهواریوگرامهای دادههای زمینشناسی استفاده میشود.
2.4. مدل سازه های مستقل
ساختارهای فضایی را می توان به صورت سلسله مراتبی در مقیاس هایی با چندین مرتبه بزرگی از چند متر تا صدها کیلومتر سازماندهی کرد. مدل سازههای مستقل (ISM) در اینجا برای مدلسازی این ساختارهای فضایی توسعه و استفاده شد. در مدل ISM، DEM Z(x)�(�)به عنوان مجموع N فیلد “مستقل” در نظر گرفته می شود. کوواریانس بین N فیلدها صفر در نظر گرفته می شود به طوری که واریانس کل از Z( x )�(�)را می توان به صورت مجموع واریانس مولفه ها نوشت. این ممکن است به صورت زیر بیان شود:
در این شکل از مدل، شرایط کوواریانس فردی ( γj( x )��(�)) دارای میانگین صفر در نظر گرفته می شوند و به واریانس واحد نرمال می شوند به طوری که توابع کوواریانس فضایی کلی Z ( سیز( h��(ℎ)) و تابع نیمه واریوگرام برای ز( x )�(�)را می توان به راحتی به صورت زیر بیان کرد:
در این عبارت، تابع کوواریانس مؤلفه است سیj(آرj; h )��(��;ℎ)با هر یک از فیلدهای مؤلفه مطابقت دارد Yj( x )��(�)و سیj(آرj; 0 ) =1C�(��;0)=1. مقادیر محدوده ” آرآر” از اجزاء به صورت زیر سفارش داده می شوند:
به این ترتیب نوشته شده است، اولین مؤلفه مولفه ای است که بیشترین اطلاعات «جزئیات» یا فرکانس مکانی بالا را دارد و آخرین مؤلفه مؤلفه ای است که بیشترین فرکانس پایین یا اطلاعات منطقه ای را دارد.
از آنجایی که ما از نیمه متغیرهای میانگین شعاعی استفاده میکنیم، مدلهای ISM مبتنی بر توابع کوواریانس متقارن شعاعی هستند که در این حالت محدودهها فواصل دو بعدی شعاعی هستند و ساعتساعت” فاصله شعاعی است. مشخص شده است که مدل گاوسی برای سطوح منظم مناسب است، مانند آنچه که اغلب در بین DEM ها [ 32 ] یافت می شود، و به خوبی شناخته شده است که مجموع گاوس ها مدل های بسیار انعطاف پذیری را برای بسیاری از توابع ارائه می دهند. به این دلایل، یک مدل گاوسی دوبعدی متقارن شعاعی در اینجا انتخاب شد تا با نیمه متغیرهای تجربی DEM ها مطابقت داشته باشد. مشابه با مولفه های نیمه واریوگرام که معمولاً یا شاید به طور ایده آل در مدل سازی ISM استفاده می شود، مدل گاوسی یک مؤلفه نیمه واریوگرام مجاز را به صورت دو بعدی ارائه می دهد و به عنوان یک کوواریانس نیز یک هسته کاملاً مثبت با ویژگی هایی است که شوئنبرگ به آن نسبت داده است. توابع فرکانس پولیا» [ 33 ].
گاوسی همچنین برای به دست آوردن نتایج تحلیلی مناسب است. مدل مورد استفاده برای مولفه گاوسی:
تعریف محدوده در معادله (9) با [ 31 ] مطابقت دارد زیرا در این فاصله (شعاعی) نیمه واریوگرام جزء نزدیک به 95٪ از مقدار آستانه می رسد. این تعریف از محدوده همچنین مطابق با چیزی است که “FWHM” در بخشی که مدل فیلترینگ معرفی شده است، نامیده می شود. FWHM به طور دقیق مخفف “نیم حداکثر عرض کامل” است، اما اغلب به صورت عملی به عنوان انتگرال یک فیلتر تقسیم بر حداکثر مقدار آن تعریف می شود و عرض باند فضایی را اندازه می گیرد. در استنتاج این نتایج، لازم است یادآوری شود که سیj( h )��(ℎ)یک تابع دوبعدی متقارن شعاعی و انتگرال کل آن است آر2�2(با استفاده از تقارن استوانه ای) عبارت است از:
اگر در مدل ISM از مولفههای گاوسی استفاده شود، تغییر در هر جزء با تغییر وضوح قابل مدلسازی تحلیلی است.
2.5. یک مدل ارتقاء مقیاس برای ISM Semi-Variograms و Covariance
تأثیر افزایش مقیاس بر تابع کوواریانس سی( h )�(ℎ)از نتایجی استفاده می کند که به اشکال مختلف در [ 14 ، 16 ، 17 ] یافت می شود. با این حال، از آنجایی که اشکال بین این منابع متفاوت است و نتیجه استفاده شده در اینجا واضح نیست، نتیجه اصلی به شکل کلی در ضمیمه A به شکلی مناسب هم برای برنامه فعلی و هم برای سایر مواردی که در آینده مورد استفاده قرار می گیرند، به دست آمده است. یک نتیجه کلی به دست آمده در این مقاله برای پردازش تصویر مناسب است و اصول اساسی شناخته شده مانند تغییر تکیه گاه و تجزیه و تحلیل های مشابه را که برای سال ها در زمین شناسی [34] و اکولوژی [35] برای تجزیه و تحلیل اثرات مقیاس استفاده شده اند، تعمیم می دهد . رابطه خاص بین این روش ها و موقعیت ها در [ 17] بررسی شده است]. در این سند، مدل ارتقاء مقیاس به عنوان عمل یک فیلتر 2 بعدی Low Pass (خطی) در نظر گرفته شده است. φ�. تغییر مقیاس و اندازه سلول شبکه را می توان به عنوان استفاده از یک پیش فیلتر از این شکل و سپس نمونه برداری که در آن پیش فیلتر به طور موثر به عنوان یک فیلتر ضد آلیاسینگ عمل می کند، مدل سازی کرد. در برخی موارد، فیلتر اولیه توسط ابزاری که دادهها را جمعآوری میکند به جای فیلتر دیجیتالی دادهها ارائه میشود. با توجه به وضعیت ارائه شده در این مقاله، فیلتر خطی و متقارن شعاعی فرض می شود و عملکرد آن به عنوان کانولوشن تصویر دو بعدی مدل سازی می شود. تابع کوواریانس برای داده های ارتقا یافته ( سیاف( h )��(ℎ)) را می توان به صورت پیچیدگی یک کوواریانس مبتنی بر فیلتر و کوواریانس داده های اصلی بیان کرد (به پیوست A مراجعه کنید ):
این فرآیند را می توان به صورت تحلیلی با استفاده از کوواریانس گاوسی و فیلتر گاوسی نشان داد. اجازه دهید کوواریانس (شعاعی) مربوطه ( سیj( ر )��(�)) و فیلتر متقارن شعاعی ( φ ( S; ر )�(�;�)) توابع باشد:
عبارت اساسپهنای باند مکانی موثر فیلتر را به روشی مشابه محدوده تعریف می کند آرjآر�مقیاس طول فضایی جزء را تعریف می کند سیj( ر )سی�(�). با استفاده از نتیجه قبلی برای انتگرال دو بعدی توابع کوواریانس گاوسی شعاعی، فیلتر φ�دارای (2D) انتگرال 1 و FWHM از π––√اس�اس. علاوه بر این، همانطور که در بالا تعریف شد، میتواند از ویژگی کانولوشن تحلیلی مناسب [ 3 ] برای توابع گاوسی استفاده کند که:
یعنی پیچیدگی دو گاوسی دوباره گاوسی است [ 36 ]. نتیجه می شود که اگر سیj( ر )سی�(�)جزء یک ISM با واریانس (آستانه) است σ2j��2و محدوده آرjآر�، نتیجه اعمال فیلتر تکرار شده ( سیφ( ر )سی�(�)) به تابع کوواریانس و استفاده از خاصیت کانولوشن بالا برای گاوسیان به صورت زیر است:
این تابعی از همان نوع قبلی است اما با کاهش واریانس و افزایش دامنه در هر جزء. مقادیر پارامترهای مؤلفه نیمه متغیری اصلاح شده (مقیاس شده) عبارتند از:
از این نتیجه میشود که کاهش واریانس مؤلفهها به دلیل افزایش مقیاس کوچکتر است اگر محدوده اصلی ( آرjآر�) جزء بزرگ نسبت به اساس(عرض باند فضایی فیلتر) و بزرگتر اگر محدوده اصلی ( آرjآر�) جزء کوچک نسبت به اساس. از سوی دیگر، محدوده ( آر˜jآر˜�) داده های فیلتر شده افزایش می یابد و این افزایش برای مؤلفه های فرکانس بالا بیشتر خواهد بود. در نتیجه، اگر اجزای فرکانس بالا فقط بخش کوچکی از واریانس اصلی را تشکیل دهند، ظاهراً فیلتر تأثیر زیادی نخواهد داشت.
کاهش مقیاس نیز شامل یک فیلتر خطی مکمل فیلتر افزایش مقیاس است. با این حال، یک مرحله اضافی را نیز شامل می شود که در این مقاله پوشش داده نخواهد شد. مرحله اضافی به این دلیل است که افزایش مقیاس اطلاعات را از دست می دهد. در نتیجه، کاهش مقیاس کامل شامل فیلتر کردن و اضافه کردن اطلاعات از دست رفته است. در متونی مانند [ 3 ] با جزئیات بیشتری توضیح داده شده است.
2.6. در نظر گرفتن روندها
در مدل ISM هر یک از اجزا دارای یک محدوده و یک آستانه می باشد. بنابراین مجموع نیز در نهایت به یک آستانه می رسد و مدلی را ارائه می دهد که هم در افزایش ثابت است و هم «مجاز». آستانه کامپوزیت در یک محدوده (شعاعی) رخ می دهد که در آن طول همبستگی اجزا به همه رسیده است و آستانه مجموع آستانه های مدل جداگانه است. در مطالعات DEM، یک نیمه متغیر داده که به آستانه نمی رسد معمولاً به دلیل وسعت محدود داده ها مشاهده می شود. در این صفحه، فرض بر این است که تغییرات منطقه ای در مقیاس بزرگ (مانند حوضه های شیب دار منطقه ای یا زنجیره کوه های ناهمسانگرد) “روند” را به عنوان یک اثر مشاهده شده در داده ها ایجاد می کند، به طوری که وضعیتی که در آن به آستانه در وسعت داده ها نمی رسد مدل سازی شده است. با گنجاندن اجزایی که طول (محدوده) همبستگی فراتر از گستره داده ها دارند. فرض بر این است که همه اینها را می توان در یک اثر ترکیب کرد که به عنوان بخش افزایشی اولیه یک نیمه واریوگرام مرکب با دامنه بسیار فراتر از گستره داده محقق می شود. اگر یک جزء گاوسی با دامنه فراتر از گستره داده ها برای مدل سازی روند در گستره داده ها استفاده شود، می توان نشان داد که محدوده جداگانه و مقادیر پارامتر آستانه به طور جداگانه به خوبی تعریف نشده اند، بلکه پارامتری مانند فرض بر این است که همه اینها را می توان در یک اثر ترکیب کرد که به عنوان بخش افزایشی اولیه یک نیمه واریوگرام مرکب با دامنه بسیار فراتر از گستره داده محقق می شود. اگر یک جزء گاوسی با دامنه فراتر از گستره داده ها برای مدل سازی روند در گستره داده ها استفاده شود، می توان نشان داد که محدوده جداگانه و مقادیر پارامتر آستانه به طور جداگانه به خوبی تعریف نشده اند، بلکه پارامتری مانند فرض بر این است که همه اینها را می توان در یک اثر ترکیب کرد که به عنوان بخش افزایشی اولیه یک نیمه واریوگرام مرکب با دامنه بسیار فراتر از گستره داده محقق می شود. اگر یک جزء گاوسی با دامنه فراتر از گستره داده ها برای مدل سازی روند در گستره داده ها استفاده شود، می توان نشان داد که محدوده جداگانه و مقادیر پارامتر آستانه به طور جداگانه به خوبی تعریف نشده اند، بلکه پارامتری مانند σ2/ ر�2/آربه خوبی تعریف شده است. یعنی روشی که مدل از مبدا به وسعت داده افزایش مییابد، روند را نشان میدهد. بنابراین، اهمیت به محدوده اجزای روند فردی و مقادیر آستانه نسبت داده نمی شود – بلکه فقط به نسبت.
رسیدن به آستانه مرکب در محدوده داده ها برای برخی از روش های زمین آماری بسیار مهم است. مدتی است که تأسیس شده است [ 37] که اگر به آستانه نرسیده باشد، کریجینگ معمولی (OK) مغرضانه یا غیر ممکن است. در این شرایط، این امر سنتی است که فرض کنیم فقدان آستانه در محدوده داده ها نشان دهنده وجود یک روند سیستماتیک است. به طور معمول، روند به عنوان یک چند جمله ای تخمین زده می شود و باقیمانده های برازش حداقل مربعات به عنوان متغیرهای تصادفی فرض می شوند و می توانند توسط کریجینگ با استفاده از نیمه واریوگام هایی که به یک آستانه می رسند، تخمین بزنند. با این حال، افراد همچنین دریافتهاند که ساختار همبستگی باقیماندههای بهدستآمده از این طریق ممکن است به سختی توسط مؤلفههای نیمهواریوگرام «مجاز» مدلسازی شود. و مدل های چند جمله ای معنای کمی فراتر از گستره داده ها دارند. ماهیت نامطلوب چنین مدلهای چند جملهای ماترون را بر آن داشت تا بسط دادههای زمین آمار را به توابعی که در افزایشهای تعمیمیافته ساکن هستند، مورد بحث قرار دهد.38 ] و شامل توابع کوواریانس تعمیم یافته مربوطه است. این رویکرد به سطح بالایی از پیچیدگی رسیده است که توسط Chilès و Delfiner [ 14 ] توضیح داده شده است. با این حال، این نسبتاً پیچیده است و روشهای سادهتری نیز در عمل امتحان شدهاند، مانند تفریق میانگین متحرک که شامل روش کریجینگ توصیف شده توسط الیور [ 27 ] برای تخمین مؤلفههای ISM است. با این حال، اینها هنوز هم منجر به تغییراتی در ساختار کوواریانس میشوند که مدلسازی نشدهاند.
داشتن یک مدل نیمه واریوگرام که به آستانه نمی رسد، برای مطالعات ارتقاء مقیاس انجام شده در این مقاله هیچ پیامدی ندارد. با این حال، Kriging برای شناسایی اجزای مقیاس در داده ها استفاده می شود و بر استفاده از آن ابزار تأثیر می گذارد. روشهای معرفیشده در بخش بعدی میتوانند روندها را مدیریت کرده و از شناسایی صحیح اجزاء توسط ابزار Kriging و همچنین سایر کاربردهای مفید اطمینان حاصل کنند.
2.7. مدل بانک فیلتر برای ISM Semi-Variograms and Covariance
مدل افزایش مقیاس در استفاده از یک فیلتر پایین گذر به بهترین مقیاس DEM برای رسیدن به مقیاس درشت تر استفاده شده است. بخش نتایج نشان خواهد داد که چگونه این میتواند مدلی برای نقشهبرداری محصولات ارائه دهد که در آن «مقیاس» با سطوح مختلف نقشهبرداری نظرسنجی یا روشهای جمعآوری دادهها انتخاب شده است. مثال دوم از روشی به نام “بانک فیلتر” استفاده می کند. کاربرد زیادی در تحلیل سنجش از دور دارد [ 39 ]. ساده ترین حالت مربوط به اعمال یک فیلتر پایه بالابر روی داده ها است. این نتیجه کم کردن یک تصویر ارتقا یافته با همان وضوح از تصویر اصلی است، یا:
این شکل از فیلتر در پردازش تصویر دیجیتال [ 3 ] برای حذف اجزای فرکانس پایین به خوبی شناخته شده است، بنابراین یک “فیلتر بالا گذر” است. ” I�در اینجا نمادی از دست نخورده بودن تصویر توسط کاربرد آن است. با این حال، حتی بهترین مقیاس (کوچکترین پیکسل) تصویر را می توان به عنوان یک نسخه ارتقا یافته از یک تابع زیرین با “در نظر گرفت. SS” ارزش ( s0�0) بر اساس اندازه پیکسل آن. نشان دادن فیلتر با پهنای باند فضایی موثر s0�0توسط φ0�0، عملیات را می توان نوشت:
به طور کلی، چنین عملیاتی نمونه هایی از فیلترهای “گذر باند” [ 3 ] هستند. آنها فرکانس های پایین تعریف شده توسط FWHM را حذف می کنند ( S�) از φ�و همچنین اثرات فرکانس بالا را طبق تعریف FWHM حذف کنید ( s0�0) از φ0�0. از مشتقات قبلی، s>s0s>�0. چه زمانی φ0*f�0*�مجموعه داده است، این فیلتر مربوط به حذف یک “میانگین” در حال اجرا (یعنی فیلتر پایین گذر) از داده ها است. Bf��بنابراین، پس از استخراج چنین میانگین در حال اجرا، می توان به عنوان تصویر “باقیمانده” نگاه کرد. این نوع رویکرد یک روش متداول برای حذف روندهای قبل از کریجینگ است، اما، همانطور که در زیر نشان داده شده است، می توان از قضیه پیوست A برای تعیین چگونگی تأثیر آن بر ساختار کوواریانس داده ها استفاده کرد.
اگر یک تصویر دارای یک مدل ISM باشد، می توان مدل ISM مربوطه را برای تصویر حاصل پس از اعمال بانک فیلتر استخراج کرد و برای اجزای گاوسی نتیجه دوباره تحلیلی است. به طور خاص، هنگام تفریق مولفه های پایین گذر از داده ها، از نتیجه پیوست A چنین است که:
جفت پیچیدگی ها همگی قابل مدل سازی هستند و اگر کوواریانس فضایی گاوسی باشد، نتیجه تحلیلی است. در آن صورت، به روشی مشابه که برای ارتقاء مقیاس و با استفاده از فرمول کانولوشن گاوسی با یک جزء ISM گاوسی منفرد با محدوده انجام شد. آرj��و آستانه σ2j��2آن به شرح زیر است:
این روش همچنین در بخش Results برای شناسایی اجزای ISM در منظر با مدلسازی نیمه متغیرهای DEM و DEMهای فیلتر شده با مقادیر S مختلف استفاده شده است. بنابراین، جزئیات در یک سطح DEM بهتر شناسایی و مدلسازی میشوند. علاوه بر این، روش بانک فیلتر روندها را خاموش می کند و بنابراین اجازه می دهد تا کریجینگ به درستی و بدون مشکلاتی که در روند اجزای جزئیات دارد استفاده شود.
2.8. نشان دهنده خوبی تناسب
در این مقاله برای ارزیابی نتیجه برازش مدلهای نیمه واریوگرام از شاخص خوبی تناسب (IGF) [ 40 ] استفاده شده است. IGF به صورت زیر تعریف می شود.
جایی که: NV ��تعداد نیمهواریوگرامهای موجود در تناسب (شاخص شده با k) است. n(k)�(�)تعداد تأخیرها در نیمه واریوگرام است k�(فهرست شده توسط i�) nlik����تعداد جفت های استفاده شده در تاخیر است i�نیمه واریوگرام k�; dk(i)��(�)فاصله تاخیر برای تاخیر است i�نیمه واریوگرام k�; σ2k��2واریانس نیمه واریوگرام است k�(نه آستانه بلکه یک تخمین تصویری برای آن) ωik���وزن ترکیبی برای تاخیر است i�نیمه واریوگرام k�; γk(i)��(�)نیمه متغیری برای تاخیر است i�نیمه واریوگرام k�; γ˜k(i)�˜�(�)نیمه متغیر تخمینی (مدل) برای تاخیر است i�نیمه واریوگرام k�.
برای یک نیمه واریوگرام، IGF به موارد زیر ساده می شود:
مقدار IGF خطای RMS تناسب برای نیم واریوگرام به عنوان درصدی از مقدار آستانه است، اما وزن آن برای دادن اهمیت بیشتر به تناسب در نزدیکی مبدا و کمتر به اجزای برد بلند است. یک مقدار کوچک برای IGF مدل دقیق تری را نشان می دهد. مقدار نیمه واریوگرام در مرحله اول تاخیر در بهترین مقیاس می تواند به عنوان نویز از زمین در نظر گرفته شود. اگر مقدار IGF کمتر از مقدار درصد در یک مرحله تاخیر (در بهترین مقیاس) از مبدا نسبت به مقدار آستانه برای داده ها باشد، به این معنی است که مدل در سطح نویز متناسب است. ما از این معیار برای تعریف منظور از تناسب “خوب” با داده ها استفاده خواهیم کرد.
IGF روشی منطقی برای ترکیب داده ها از نیمه متغیرهای مختلف در یک تابع هدف متعادل ارائه می دهد. به عنوان مثال، نیمه متغیرها بر اساس بهترین مرحله تاخیر ممکن است در یک محدوده و یک نیمه متغیر با گام تاخیر بزرگتر تا محدوده بسیار دورتر محاسبه شود. IGF راهی برای ترکیب منطقی آنها فراهم می کند. همین امر برای نیمهواریوگرامهای مبتنی بر یک تصویر در مقیاسهای مختلف یا برای نیمهواریوگرامهای یک تصویر و تبدیل تصویر (شامل تبدیلهای بانک فیلتر یا تبدیلهای شیب و انحنای شعاعی) صدق میکند، در صورتی که تأثیر روی نیمواریوگرام باشد. شناخته شده.
2.9. برآورد اجزای مدل ISM با استفاده از کریجینگ
مدل ISM مجموعه ای از مدل های مولفه نیمه واریوگرام را در مقیاس های فضایی مختلف ارائه می دهد. با این حال، شناسایی اجزای چشمانداز مربوط به مؤلفههای ISM نیز مهم است. روشی برای انجام این کار که برای تصاویر دیجیتالی مناسب است و بر اساس کریجینگ معمولی است در [ 27] توضیح داده شده است]. این روش در اینجا به روشهای مختلفی برای استخراج تخمینهای مولفههای مجزای مدل اجزای مستقل معادله (5) استفاده شده است. هنگامی که این روش به طور مستقیم اعمال می شود، به نظر می رسد که برخی از مشکلات را داشته باشد (مانند نیمه متغیرهای مولفه های کوتاه برد معمولاً مشابه یا شبیه به نیمه متغیرهای مولفه نیستند) اما اغلب برای کمک به شناسایی ماهیت جزئیات مفید ثابت شده است. اجزای یک ISM در چشم انداز و در اینجا برای ارجاع به پسوند مبتنی بر یک بانک فیلتر گرفته شده است.
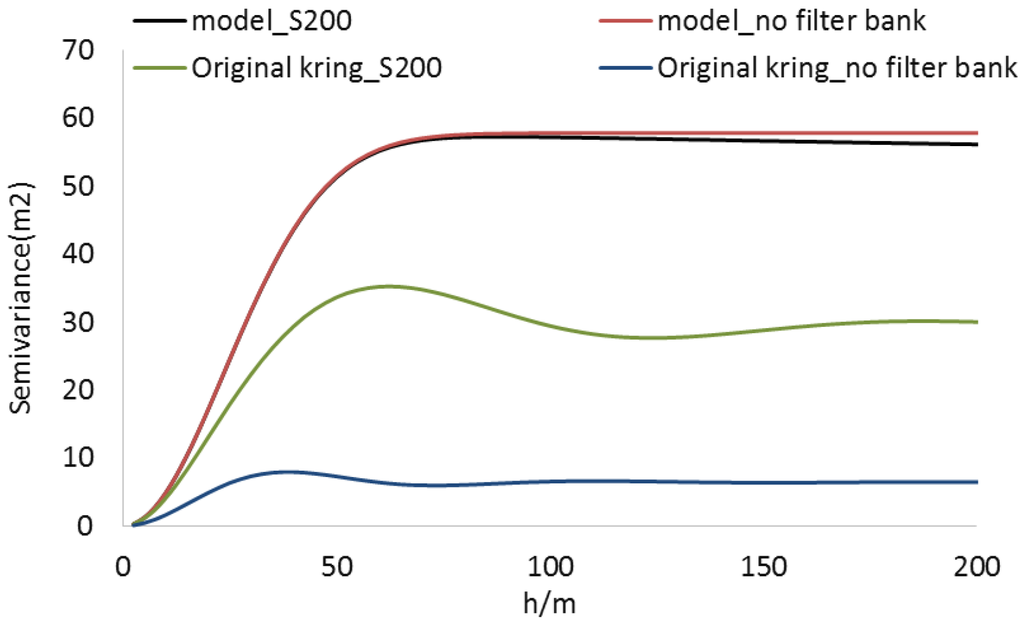
این روش توسعه یافته کریجینگ را شامل می شود، بنابراین به یک مدل نیمه واریوگرام نیاز دارد که به یک آستانه برسد. همچنین معادلات کریجینگ را بر روی زیر مجموعههای تصویر حل میکند تا در صورت استفاده از اجزای برد نسبتاً کوچک، وارونگی ماتریس عملیتر باشد. استفاده از زیرمجموعه ها همچنین به این معنی است که پردازش می تواند به راحتی و کارآمد به عنوان مجموعه ای از فیلترهای تصویر دیجیتال بیان شود. از آنجایی که اجزای نیمه واریوگرام باید در محدوده فیلترها (زیر مجموعه ها) به آستانه ها برسند، اجزای برد بلند برای همه این الزامات مشکل ایجاد می کنند. آنها در روش اصلی [ 27 ] با تفریق ضمنی یک میانگین محلی روی پنجره کریجینگ در برنامه مدیریت می شوند. هنگام بحث در مورد این موضوع بعداً در ضمیمه C، نشان داده خواهد شد که چگونه این یک تبدیل بانک فیلتر ضمنی است و در نتیجه نیمه متغیرهای مولفه تغییر می کند. در بخش نتایج، مشخص خواهد شد که چگونه بانک فیلتر روندها را خاموش می کند و اجزای فرکانس بسیار پایین را حذف می کند. از آنجایی که نیمهواریوگرامهای اصلاحشده به صورت تحلیلی شناخته شدهاند، استفاده از Kriging برای شناسایی اجزا پس از اعمال بانک فیلتر کاملاً معتبر است. این در بخش نتایج و پیوست C نشان داده شده است .
3. نتایج
3.1. شواهدی برای اثرات افزایش مقیاس در نمونه انتخاب شده
پارامترهای زمین استخراج شده از DEM انتخاب شده تحت تأثیر وضوح قرار گرفتند زیرا برخی از اطلاعات مقیاس دقیق با درشت تر شدن وضوح DEM از بین رفتند. به عنوان مثال، جدول 1 نشان می دهد که چگونه در مثال انتخاب شده، با درشت تر شدن وضوح از 2.5 متر به 25 متر، مقدار شیب حداکثر از 70 درجه به 46 درجه کاهش می یابد، میانگین شیب از 29 درجه به 21 درجه کاهش می یابد، و STDev شیب کاهش می یابد. از 12 درجه تا 8 درجه
همانطور که در مقدمه ذکر شد، چنین رفتاری به خوبی شناخته شده بود. با این حال، دلیل کاهش شیب با درشتتر شدن وضوح، این بود که ساختارهای زمین با جزئیات (یا بهترین مقیاس) از طریق اثر افزایش مقیاس از بین رفته یا در بزرگی کاهش یافتند. مشخص کردن زمین توسط اجزای مقیاس شناسایی شده، هدف تجزیه و تحلیل ISM بود.
3.2. تجزیه و تحلیل نیمه واریوگرام تجربی DEM
3.2.1. تجزیه و تحلیل ناهمسانگردی دو بعدی
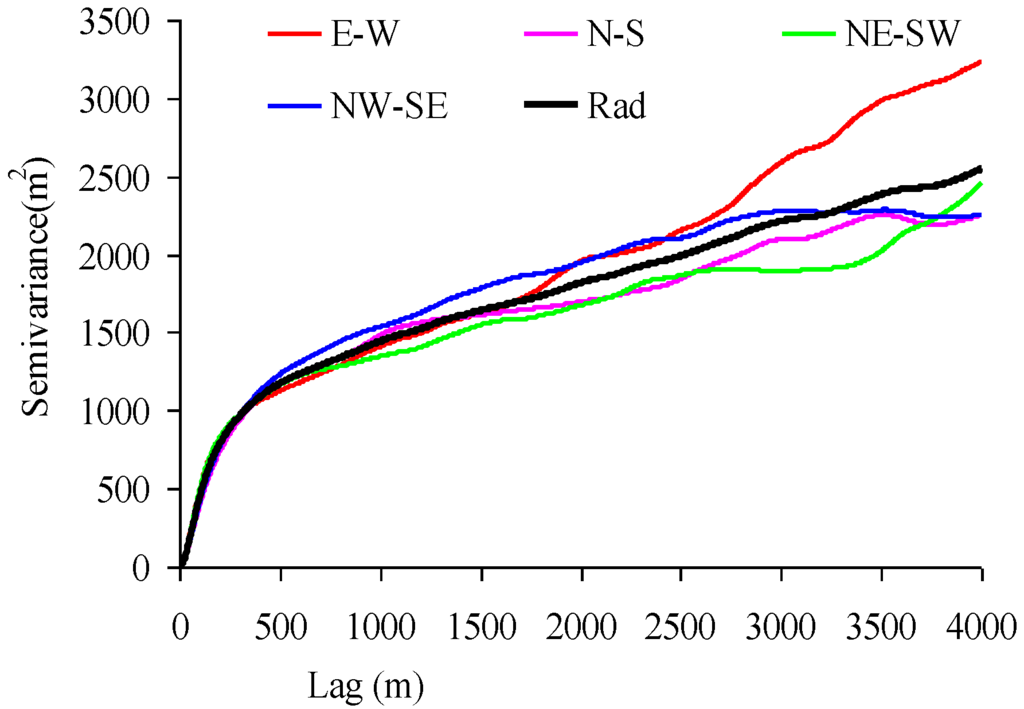
نیمه متغیرهای تجربی از اعداد دیجیتال DEM جمع آوری شده برای این مطالعه محاسبه شد. نیمهواریوگرامها با حداکثر تاخیر 4 کیلومتری (تقریباً نیمی از اندازه تصاویر) محاسبه شدند. نمایش گرافیکی نیمه متغیرها در چهار جهت اصلی همانطور که در شکل 2 نشان داده شده است.که با استفاده از DEM2.5 محاسبه شد. شواهد کمی از ناهمسانگردی به فاصلههای تاخیری در حدود 500 متر وجود دارد زیرا نیمهواریوگرام از چهار جهت مشابه بود. واریانس آستانه فراتر از 500 متر است. تغییرات در جهت NW-SE و NS در فاصله تاخیر 3.5 کیلومتر مسطح شد، در حالی که تغییرات در جهت NE-SW و EW همچنان افزایش یافت. این را می توان با جهت کانال اصلی در منطقه و همچنین شکل و جهت حوضه توضیح داد. از آنجایی که تفاوت بین واریانس ها در جهات مختلف تا فاصله تاخیری 2 کیلومتری تفاوت زیادی نداشت، نیمه متغیر شعاعی فقط تا فاصله 2 کیلومتری در زیر محاسبه شد، زیرا به نظر می رسید فراتر از این نقطه رفتار تحت سلطه است. یک رویکرد. اثرات روندهای ناهمسانگرد شناسایی شده در اینجا به دلیل شکل کلی حوضه و جهت گیری خاص حوضه بوده و در یک جزء نیمه متغیر “روند” شعاعی در مدل ترکیب شدند، زیرا فقط ساختارهای “بدون چرخش” در داخل حوضه بود که برای آن جالب بود. این مطالعه. برای اهداف حاضر، یک “روند” به عنوان یک ساختار در مقیاس گسترده مرکب تعریف می شود که جزء نیمه واریوگرام آن تا حداقل نصف وسعت DEM به آستانه ای نمی رسد.
3.2.2. نیمه واریوگرام برای DEM با وضوح های مختلف
میانگین شعاعی نیمه متغیرهای تجربی محاسبه شده بر اساس DEM های انتخاب شده در شکل 3 نشان داده شده است . نیمه متغیرها برای این DEM ها قبل از حداکثر تاخیر (2 کیلومتر) به آستانه نرسیدند که احتمالاً به دلیل روندهای ساختاری منطقه ای سازگار در این منطقه بود. نیمه متغیرهای میانگین شعاعی DEM2.5 و DEM25 متر از نظر شکل مشابه بودند. میانگین نیمه متغیر شعاعی DEM2.5 کمی بزرگتر از DEM25 بود که نشان می دهد در سطح DEM25 واریانس مربوط به برخی اطلاعات زمین در مقایسه با DEM2.5 از بین رفته است. در حالی که در نگاه اول ممکن است نیمهواریوگرامهای DEM خیلی متفاوت به نظر نرسند، افزایش مقیاس تغییراتی را در شیبها ایجاد کرده است که در جدول 1 نشان داده شده است .
3.3. نتایج برای مدلسازی ISM میانگین شعاعی نیمه واریوگرام های DEM
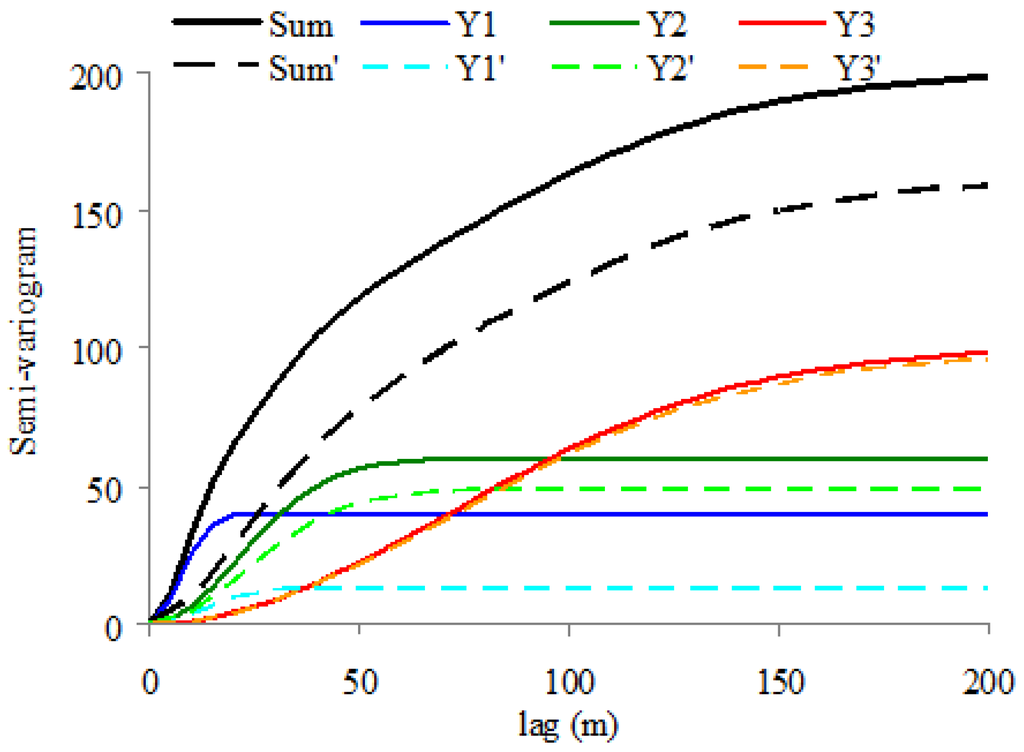
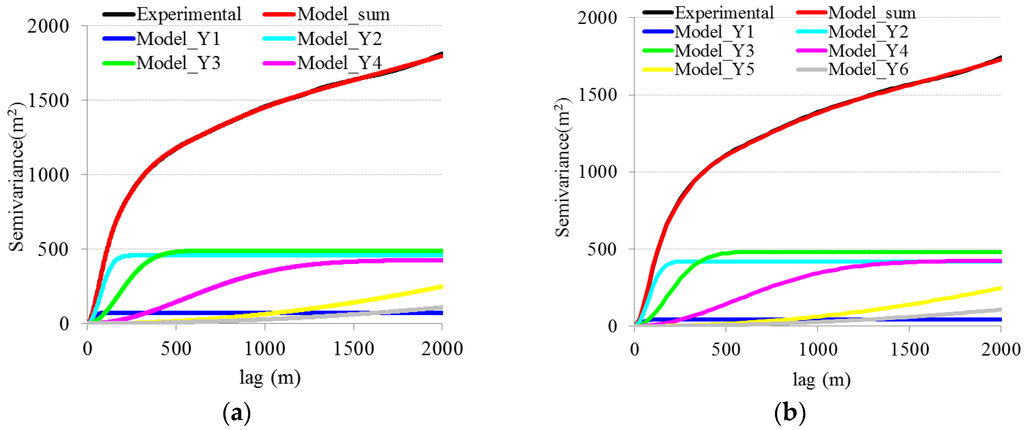
نیمهواریوگرامهای مبتنی بر DEM با وضوحهای مختلف با استفاده از یک ISM در منطقه مورد مطالعه مدلسازی شدند. به منظور بهتر کردن جزئیات در سطح DEM2.5 مدلسازی شده، یک بانک فیلتر با پهنای باند 15 متر، 70 متر، 200 متر و 500 متر همانطور که در بخش 2.7 توضیح داده شد استفاده شد . پس از یک فرآیند برای تعیین کمترین تعداد اجزای مورد نیاز برای برازش داده ها در بهترین مقیاس داده ها به سطح موثر IGF (نگاه کنید به بخش 2.8 مراجعه کنید.در نهایت از شش مؤلفه (Y1، Y2، Y3، Y4، Y5 و Y6) برای مدلسازی DEM در منطقه مورد مطالعه استفاده شد. در ادامه، مقادیر محدوده برای قطعات به صورت R1، R2، R3، R4، R5 و R6 و مقادیر آستانه با شماره گذاری s1، s2، s3، s4، s5 و s6 شماره گذاری شدند. مؤلفه Y6 یک مؤلفه «روند» با برد بسیار زیاد دلخواه را نشان میدهد که ویژگیهای مقیاس وسیعتری را که در بخشی از تصویر که در آن مطالعه متمرکز شده است، حل نشده مدلسازی میکند. مقدار برد آن حیاتی نبود، فقط باید به طور قابل توجهی بزرگتر از 2 کیلومتر باشد، و نسبت آستانه به برد آن (بهترین ویژگی حل شده آن) برای همه مجموعه داده ها سازگار است. هنگامی که DEM ها در تعدادی از وضوح ها مقایسه می شدند، آنچه برای محاسبه مدل های ISM با استفاده از تئوری توسعه یافته در بخش 2.5 مورد نیاز بود مقادیر S بود.نشان دهنده اثرات مختلف تعمیم درگیر در DEM های مختلف است. مقدار S برای DEM2.5 ثابت شد S0=2.5/π−−√�0=2.5/�، که حداقل مقدار نظری مربوط به اندازه سلول شبکه بود. مقدار S دیگر (در این مورد فقط یک DEM دیگر وجود دارد) به عنوان بخشی از فرآیند برازش تغییر کرد اما به گونه ای محدود شد که مقدار آن بزرگتر از S 0 باشد . مقدار S برازش شده برای DEM25 28.9 متر در مقایسه با مقدار نظری مبتنی بر وضوح اسمی 14.1 متر بود که نشان می دهد DEM25 تعمیم بیشتری نسبت به اندازه سلول وضوح دارد. مقدار درصد در یک مرحله تاخیر (در بهترین مقیاس) از مبدا نسبت به مقدار آستانه برای داده ها 1.54٪ بود. مقادیر IGF نشان داده شده در جدول 2 همگی کوچکتر از 1.54٪ بودند که به این معنی بود که مدل در سطح نویز قرار می گرفت.
نتایج برازش به این روش در شکل 4 و جدول 3 نشان داده شده است . با استفاده از مدلهای گاوسی برای مؤلفههای نیمواریوگرام بهعنوان مدلی برای مقیاسبندی با فیلتر کردن، همانطور که در بخش 2.5 توضیح داده شد ، یک مدل تحلیلی برای تغییرات در نیمهواریوگرام با مقیاس استخراج شد و سپس به دادهها برازش شد. در نتیجه، دامنه مولفه ها در یک رابطه مستقیم و قابل پیش بینی با تعمیم مقیاس افزایش یافت و آستانه ها کاهش یافت. در این فرآیند، تنها یک مدل زیربنایی برای ISM وجود داشت و تنها از پارامتر S برای ارتقاء آن برای مطابقت با DEM25 استفاده شد. S _مقادیر رابطه بین مدل پایه و مدلی را که با نیمه متغیرهای تجربی مطابقت دارد، تعریف می کند. بین مدلهای نیمهواریوگرام ارتقا یافته، مقادیر آستانه و محدوده در اجزای ISM برد کوتاه با سرعت بیشتری و قابل پیشبینیتر نسبت به مولفههای دوربرد تغییر کردند، همانطور که از معادله انتظار میرفت (معادله (16)).جدول 3محدوده و مقادیر آستانه هر جزء را در وضوح 2.5 متر و 25 متر نشان داد. آستانه (یعنی واریانس) جزء Y1 با افزایش وضوح از 2.5 متر به 25 متر 31.1٪ کاهش یافت و دامنه آن 45.2٪ افزایش یافت. کاهش آستانه و افزایش دامنه مولفه Y2 در 10٪ بود. برای اجزای Y3، Y4، Y5 و Y6، کاهش آستانه و افزایش برد بسیار کم یا اصلاً نبود. در فرآیند افزایش مقیاس، با درشت تر شدن وضوح از 2.5 متر به 25 متر، اطلاعات توپوگرافی از بین رفت. در این مورد، از دست دادن اطلاعات عمدتا تا مقیاس حدود 70 متر بود. از آنجایی که تغییرات تقریباً همه با مؤلفه 1 مرتبط بود، می توان استنباط کرد که این تغییر است که تغییرات در توزیع شیب مشاهده شده در جدول 1 را ایجاد کرده است .
3.4. نگاشت اجزای توپوگرافی با آنالیز کریجینگ
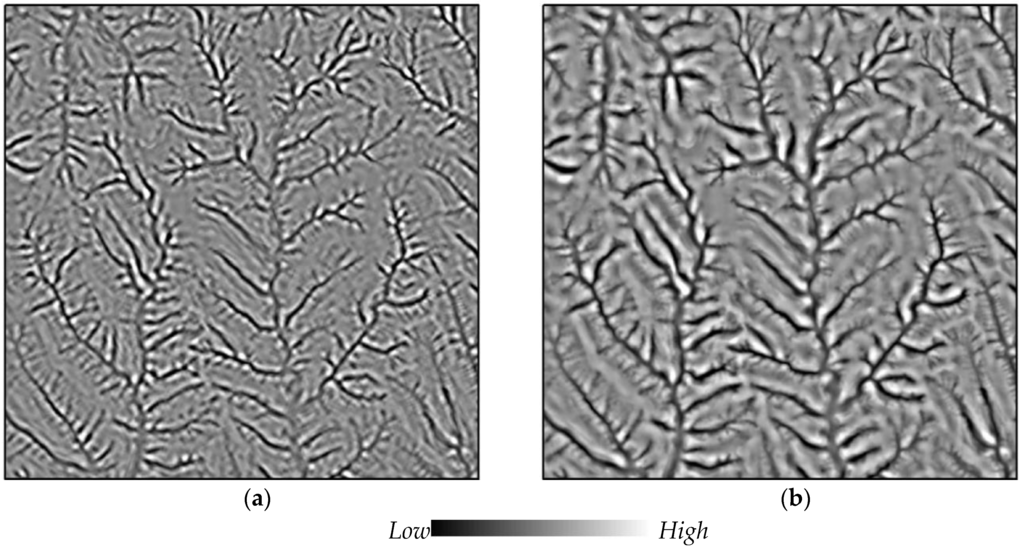
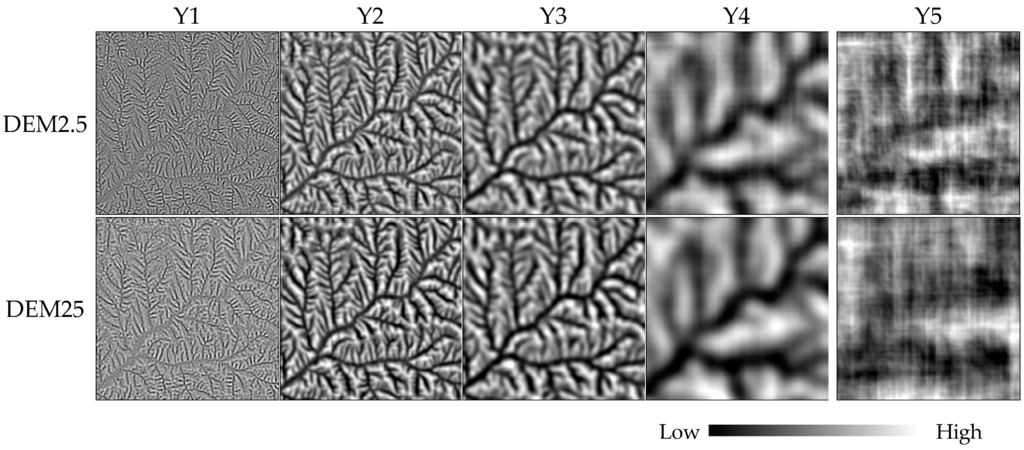
کریجینگ در این مطالعه برای شناسایی اجزای مدل همانطور که در بخش 2.9 و بر اساس ایده های ارائه شده در [ 27 ] شرح داده شد، استفاده شد. یک بانک فیلتر با پهنای باند فیلتر 200 متر به DEM اعمال شد و تصویر حاصل در فرآیند کریجینگ عمدتاً برای شناسایی دو جزء فرکانس بالا (Y1 و Y2) استفاده شد. بانک فیلتر برای بهبود مدلسازی اجزای دقیق همانطور که در جزئیات بیشتر توضیح داده شده است، استفاده شد پیوست C با جزئیات بیشتر توضیح داده شده است، استفاده شد. جزء Y6 گنجانده نشد زیرا محدوده Y6 بزرگتر از وسعت منطقه بود، بنابراین آن را در فرآیند کریجینگ ناپایدار می کرد. سایر اجزا بر اساس سطح DEM روستایی با استفاده از کریجینگ نقشهبرداری شدند. این روند همچنین توسط کریجینگ به عنوان یک تخمین میانگین محلی مدلسازی شد، اما برای بانک فیلتر، روند مدلسازی شده باید به طور موثر صفر باشد و آزمایشی برای تنظیمات استفادهشده ارائه دهد.
شکل 5 تصویری از برآوردهای کریگد از سطوح توپوگرافی مربوط به هر جزء را در وضوح 2.5 متر و 25 متر نشان می دهد. سطح برای مولفه Y1 کوتاه ترین برد به طور قابل توجهی تحت تاثیر وضوح قرار گرفت. سطوح مشتق شده از برد بلندتر Y3، Y4، Y5 از طریق فرآیند ارتقاء تغییر چندانی نکردند زیرا اجزای نسبتاً پایداری با فرکانس پایین چشم انداز در هر دو وضوح 2.5 متر تا 25 متر بودند. مقداری تغییر در مولفه Y2 وجود داشت، با تغییر دامنه 8.3٪ در فرآیند ارتقاء مقیاس، با این حال، تفاوت در سطح جزء Y2 به سختی قابل تشخیص بود.




بدون نظر