

خلاصه
سادهسازی ساختمانهای سهبعدی (سهبعدی) برای بهبود کارایی تجسم محیطهای شهری و در عین حال حصول اطمینان از صحنههای شهری واقعی بسیار مهم است. علاوه بر این، زیربنای ساخت مدلهای شهر سه بعدی چند مقیاسی (3DCM) است که میتواند برای مطالعه مسائل مختلف شهری استفاده شود. در این مقاله، ما یک رویکرد عمومی و در عین حال موثر برای سادهسازی ساختمانهای سه بعدی طراحی میکنیم. به جای تکیه بر اطلاعات معنایی و اطلاعات هندسی، رویکرد ما صرفاً مبتنی بر اطلاعات هندسی است زیرا بسیاری از ساختمانهای سه بعدی هنوز شامل اطلاعات معنایی نیستند. علاوه بر این، وسیله ای یکپارچه برای درمان ساختمان های سه بعدی با سقف های شیبدار یا مسطح فراهم می کند. دو مطالعه موردی، یکی ساده سازی ساختمان های سه بعدی جداگانه در سطوح مختلف پیچیدگی را بررسی می کند، در حالی که دیگری،
کلید واژه ها:
ساده سازی ؛ ظاهر کلی ؛ ویژگی های جهانی ؛ لبه های نماینده
1. معرفی
مدلهای سه بعدی شهر (3DCM) به دلیل توانایی آنها در ارائه صحنههای واقعی که به راحتی قابل درک و درک است [1] و همچنین پیشرفتهای تکنولوژیکی در سختافزار، نرمافزار و جمعآوری دادههای ساختمانهای سه بعدی در کاربردهای شهری برجسته شدهاند. پشتیبانی از تجسم سه بعدی [ 2 ]. در برنامه ریزی شهری، 3DCM مانند آنچه در [ 3 ] ارائه شده است، طرح های طراحی جایگزینی را ارائه می دهد که شهر آینده را برای برنامه ریزان شهری برای ارزیابی طراحی معماری و زیبایی شهر نشان می دهد. همچنین کاربردهای دیگری از 3DCM برای کاوش در گذشته، حال و آینده یک شهر وجود دارد [ 4]]، ارزیابی برابری محیطی در مشاهده امکانات محیطی (به عنوان مثال، فضای سبز، بدنه های آبی، ساختمان های تاریخی، کوه ها) [ 5 ] یا دسترسی به نور خورشید [ 6 ]، و ارزیابی عملکرد سیستم ماهواره ای ناوبری جهانی چند صورت فلکی [ 7 ].
در حالی که مزایای متعدد در کاربردهای شهری دارد، دستیابی به یک 3DCM واقعا کاربردی برای کاربردهای شهری به دلیل نیاز مداوم به رسیدگی به حجم عظیمی از ساختمانهای سه بعدی با مشکل مواجه شده است. برای مثال، 3DCM شارلوت، NC، شامل تقریباً 370000 ساختمان سه بعدی یا بیش از چهار میلیون چند ضلعی است [ 8 ]. این مشکل زمانی حادتر میشود که کاربران سعی میکنند با 3DCM تعامل داشته باشند تا قسمتهای مختلف شهر را کاوش کنند، که شامل حرکت مداوم و بزرگنمایی است.
برای مقابله با این چالش، مطالعات موجود به بازنمایی های چند مقیاسی [ 8 ، 9 ، 10 ، 11 ] متوسل شده اند. در این مطالعات، ساختمانهای مهم مانند نشانهها، ساختمانها در مناطق متمرکز که کاربران به آن علاقهمند هستند، یا ساختمانهایی که نزدیک به نقطه دید هستند با ساختمانهای سهبعدی در سطوح بالایی از جزئیات (LOD) تجسم میشوند [12] .] در حالی که سایرین در LOD های کم تجسم می شوند. در مقایسه با نمایش تمام ساختمانهای سهبعدی در LODهای بالا، تجسم چند مقیاسی به حجم داده کمتری نیاز دارد که به نوبه خود کارایی تجسم را بهبود میبخشد. علاوه بر این، توانایی آن برای نشان دادن ساختمانهای سهبعدی در LODهای بالا و پایین، کنتراست بصری را ارتقا میدهد و ساختمانهای سهبعدی را در LODهای بالا افزایش میدهد، که به کاربرانش کمک میکند اطلاعات مهم را به طور مستقیمتر دریافت کنند.
با درک مزایای ذکر شده، محققان بر روی رویکردهایی برای تعمیم ساختمانهای سه بعدی تمرکز کردهاند که زیربنای تجسم چند مقیاسی یک 3DCM است. این رویکردها با توجه به ویژگیهای هندسی و معنایی ساختمانهای سهبعدی طراحی و اجرا میشوند و بنابراین وابسته به 3DCM هستند. در ابتدای 3DCM، ساختمان های سه بعدی 2.5 بعدی هستند زیرا فقط پلان ها و ارتفاعات زمین را در بر می گیرند. سادهسازی چنین ساختمانهای سهبعدی اساساً به تعمیم نقشههای زمینی دوبعدی میرسد، که موضوعی حیاتی در نقشهبرداری بوده و به طور گسترده مورد مطالعه قرار گرفته است. به عنوان مثال، Regnauld [ 13] رویکردی را پیشنهاد کرد که پلان های زمین را بر اساس معیارهای برگرفته از نظریه گشتالت تقسیم بندی می کند. بر اساس این معیارها، رویکرد الگوی مجموعه ساختمان و شباهتها و تفاوتهای بین گروههای ساختمانی را حفظ میکند تا از خوانایی نقشههای زمینی سادهشده اطمینان حاصل شود. در رگ مشابه، لی و همکاران. [ 14 ] روشی را برای گروه بندی نقشه های زمینی ساختمان ارائه کرد. پس از گروه بندی، چندین معیار آماری مفید مانند مجموع مساحت ساختمان، میانگین تفکیک و انحراف معیار جداسازی ساختمان ها به هر گروه پیوست می شود. علاوه بر این، رویکرد پیشنهادی تعدادی از الگوریتمهای توسعهیافته را برای تعمیم این گروههای ساختمانی با توجه به اطلاعات پیوست بهگونهای که محصولات چند مقیاسی مشتق میشوند، ترکیب میکند. چانگ و همکاران [ 15] یک روش سادهسازی مبتنی بر اصول خوانایی شهری پیشنهاد کرد که از شبکههای جادهای برای خوشهبندی نقشههای زمینی استفاده میکند. به این ترتیب خوانایی محیط پیچیده شهری در هر سطحی از ساده سازی تضمین می شود. یانگ و همکاران [ 16 ] هم اصول گشتالت و هم خوانایی شهری را با معرفی یک متریک فاصله جدید برای گروه بندی نقشه های زمین در نظر گرفت. یک درخت سلسله مراتبی متعاقباً برای ذخیره پلان های زمینی چند مقیاسی ساخته می شود. این روش شناخت ساختارهای شهری را تسهیل می کند.
برای روشهای مربوط به تنظیم حداقل مربعات (LSA) یا شبکه عصبی، سستر [ 17 ] روشی را برای سادهسازی نقشههای زمین با استفاده از LSA ارائه کرد. مزیت این روش این است که هنگام ساده سازی نقشه های زمین، چندین مشاهدات را به عنوان محدودیت در نظر می گیرد. Allouche و Moulin [ 18 ] شبکه عصبی را به تعمیم نقشه معرفی کردند تا مشکل چالش برانگیز شناسایی مناطق با چگالی بالا را که شامل عناصر نقشه برداری یکسانی (مثلاً نقشه های زمین) می شوند، حل کنند. این رویکرد امکان تولید سطوح مختلف گروهبندی را با توجه به مقیاس روی نقشه فراهم میکند و بنابراین نمایش چند مقیاسی عناصر کارتوگرافی را محقق میکند. سستر [ 19] از الگوریتم های قبلی برای بهینه سازی تعمیم استفاده کرد. به طور خاص، LSA برای سادهسازی و جابجایی پلانهای زمینی منفرد اتخاذ شده است، در حالی که نقشه خودسازماندهی و شبکه عصبی برای تشخیص مناطق با چگالی بالا و حفظ چگالی جسم در طول تعمیم استفاده میشود.
به غیر از رویکردهای مبتنی بر نظریه گشتالت یا LSA، کادا و لو [ 20 ] تکنیکهایی را از حوزه گرافیک کامپیوتری، مدلسازی نیمهفضا و تجزیه سلولی برای سادهسازی نقشههای زمینی معرفی کردند. این رویکرد ویژگیهای هندسی کلی نقشههای زمین را پس از سادهسازی حفظ میکند که تشخیص ساختمانها را تسهیل میکند. Haunert و Wolff [ 21 ] یک روش بهینهسازی را برای سادهسازی نقشههای زمینی با به حداقل رساندن تعداد لبهها در معرض تحمل خطای تعریفشده توسط کاربر پیشنهاد کردند.
اخیراً، پیشرفت تکنولوژی، 3DCMهای بسیار واقعی با ساختارهای پیچیده را ممکن ساخته است. رویکردهای ساده سازی این 3DCM ها را می توان به طور کلی به دو نوع تقسیم کرد. یکی از اطلاعات هندسی و اطلاعات معنایی در طول ساده سازی ساختمان های سه بعدی استفاده می کند در حالی که دیگری فقط از اطلاعات هندسی استفاده می کند زیرا بسیاری از ساختمان های سه بعدی حاوی اطلاعات معنایی نیستند. با توجه به روش های بسته به هر دو اطلاعات، فن و همکاران. [ 22 ] LSA را با اطلاعات معنایی رمزگذاری شده در زبان نشانه گذاری جغرافیای شهر (CityGML) به ساختمان های سه بعدی ترکیب کرد. مزیت رویکرد آنها این است که از اطلاعات معنایی مرتبط با اشیاء هندسی ساختمان های سه بعدی برای جلوگیری از ادغام ویژگی های اشیاء مختلف استفاده می کند. فن و منگ [ 23] الگوریتم خود را به گونه ای گسترش دادند که بتواند نه تنها سازه های ساده بلکه موارد پیچیده ای را که نقشه های زمین از ساختارهای متنوع و پیچیده ای مانند اشکال غیر مستطیلی و غیر موازی تشکیل شده است، ساده کند. علاوه بر این، آنها بر تعمیم سقف ها با حذف ویژگی های سقف کوچکتر، ساده سازی چند ضلعی های سقف و ادغام چند ضلعی های ساده شده تمرکز کردند. استفاده بیشتر از اطلاعات معنایی، ژائو و همکاران. [ 24] یک الگوریتم مبتنی بر ریختشناسی ریاضی ارائه کرد که ساختمانهای سه بعدی پیچیده را با روابط معنایی، بهویژه اتصال ساختاری در ساختمانهای سهبعدی ساده میکند تا تعمیم مناسب روابط توپولوژیکی و معنایی اجزای ساختمان سهبعدی را راهنمایی و تضمین کند. این رویکرد به ساختمانهای سهبعدی در LODهای مجزای متعدد با هندسه، روابط توپولوژیکی و معناشناسی سازگار اجازه میدهد.
از آنجایی که بسیاری از ساختمانهای سهبعدی بدون اطلاعات معنایی ساخته شدهاند، محققان تلاش زیادی برای سادهسازی ساختمانهای سهبعدی تنها بر اساس اطلاعات هندسی انجام دادهاند. مطالعات فوربرگ [ 25 ] و گرابلر و همکاران. [ 26 ] تلاشهای اولیه برای سادهسازی ساختمانهای سهبعدی را ارائه کرد که کاربرد محدودی را مشاهده کردند، زیرا آنها فقط میتوانند ساختمانهای سه بعدی را با دیوارهای متعامد و دیوارهای غیر متعامد اما عمودی پردازش کنند. علاوه بر این، این رویکردها نمی توانند اجزای ساختمان های سه بعدی را که نیاز به ساده سازی دارند، تعیین کنند. چنین محدودیتهایی با روشهای سادهسازی مبتنی بر ادراک برطرف شد [ 27 ، 28]، که بخشهای ساختمان سهبعدی را که باید بر اساس تجزیه و تحلیل تصویر رندر شده سادهسازی شوند را مشخص میکند و از سیستم بصری انسانی (HVS) برای هدایت سادهسازی ساختمانهای سه بعدی استفاده میکند.
روشهای دیگر بر روی برخورد با ساختارهای محلی یا جهانی در طول سادهسازی ساختمانهای سه بعدی تمرکز دارند. با توجه به روشهایی که بر ساختارهای محلی تأکید دارند که ویژگیهای محلی ساختمانهای سه بعدی را نشان میدهند، جیانگ و همکاران. [ 29 ] یک روش حفظ ویژگی مبتنی بر خوشه بندی سلولی و بازسازی سطح را پیشنهاد کرد که شامل سه مرحله است. ابتدا ساختمان های سه بعدی به سلول تبدیل می شوند. دوم، سلول های مرزی استخراج می شوند و یک درخت دوتایی سلولی ساخته می شود. در نهایت، ساختمانهای سهبعدی سادهشده بر اساس یک الگوریتم کانتورینگ دوگانه اصلاحشده بازسازی میشوند. به طور مشابه، Sun، و همکاران. [ 30] یک الگوریتم حفظ ساختار ارائه کرد که همچنین ساختمان های سه بعدی را به سلول تبدیل می کند. سپس نقاط از سطح سلول ها نمونه برداری می شوند. در مرحله دوم، نقاط نمونه برداری شده برای تجزیه محدب ساختمان های سه بعدی طبقه بندی می شوند. در مرحله سوم، ساختمان های سه بعدی ساده شده با ترکیب محدب ها به دست می آیند. اگرچه این دو رویکرد ویژگی ها و ساختارهای ساختمان های سه بعدی را حفظ می کنند، شناسایی ساختارهای مختلف همچنان چالش برانگیز است. برای مقابله با این چالش، لی و همکاران. [ 31] یک روش ساده سازی ساختاری را پیشنهاد کرد که از تحلیل محدب/مقعر برای استخراج سه نوع ساختار استفاده می کند: ساختارهای تعبیه شده، ساختارهای ترکیبی و سازه های اتصال. قوانین خاصی برای ساده سازی سازه های هندسی ایجاد شده است و ساختمان های سه بعدی به تدریج ساده می شوند.
با توجه به ساختارهای جهانی که نمایانگر نمای کلی ساختمان های سه بعدی هستند، کادا [ 32] الگوریتمی را پیشنهاد کرد که توسط صفحات اصلی (یعنی ساختارهای جهانی) هدایت می شود، که نمای کلی ساختمان های سه بعدی را نشان می دهد. این الگوریتم میتواند ساختمانهای سه بعدی پیچیده را در عین حفظ ظاهر کلی آنها با کمک اطلاعات معنایی موجود در ساختمانهای سه بعدی ساده کند. با توجه به محدودیتهای عدم توانایی پردازش ساختمانهای سه بعدی بدون اطلاعات معنایی و با الهام از ایده سادهسازی ساختمانهای سهبعدی از طریق تأکید بر ساختارهای جهانی، ما ابزاری یکپارچه برای سادهسازی ساختمانهای سهبعدی با کیفیت بالا با سقفهای شیبدار یا مسطح تنها با استفاده از اطلاعات هندسی ارائه میکنیم. هدف آن نشان دادن ظاهر کلی ساختمان های سه بعدی با حداقل تعداد مش است. بقیه این مقاله به شرح زیر سازماندهی شده است. بخش 2 رویکرد ما را برای ساده سازی ساختمان های سه بعدی توضیح می دهد.بخش 3 نتایج ساده سازی ساختمان های سه بعدی را با استفاده از رویکرد پیشنهادی نشان می دهد. این نمایش بر ساختمانهای سهبعدی در قالب Autodesk 3ds max [ 33 ] تمرکز دارد، زیرا این قالب بر اساس مشهای مثلثی با انعطافپذیری برای نمایش ساختمانهای سه بعدی با کیفیت بالا در اشکال دلخواه است. بخش 4 مطالعات مختلف در مورد مسائل شهری را مورد بحث قرار می دهد که بر اساس رویکردهای ساده سازی است. بخش 5 رویکرد ما را پایان می دهد و جهت آینده را ارائه می دهد.
2. یک رویکرد ساده سازی یکپارچه برای ساختمان های سه بعدی
رویکرد ساده سازی یکپارچه پیشنهادی برای ساختمان های سه بعدی، ساختمان های سه بعدی را بدون توجه به وجود یا عدم وجود اطلاعات معنایی مدیریت می کند. این به طور خاص طراحی شده است تا به اطلاعات معنایی، مانند آنچه در CityGML، برای دستیابی به هدف ساده سازی که نمایانگر نمای کلی ساختمان های سه بعدی با حداقل تعداد مش است، دست یابد. این انتخاب طراحی به این دلیل انجام میشود که بسیاری از ساختمانهای سهبعدی هنوز فقط اطلاعات هندسی دارند، نه اطلاعات هندسی و معنایی ترکیبی.
رویکرد سادهسازی پیشنهادی، درمان سقفهای شیبدار و مسطح ساختمانهای سه بعدی را تحت مفهوم ویژگیهای جهانی یکپارچه میکند. در اینجا، ویژگی های جهانی به سقف ها یا دیوارهایی اشاره دارد که حاوی اطلاعات هندسی برای بازسازی یک ساختمان سه بعدی است که نمای کلی مشابه اصلی مربوطه را نشان می دهد. برای یک ساختمان سه بعدی با سقف های شیبدار، ویژگی های کلی باید سقف ها باشند زیرا حاوی اطلاعات هندسی برای ساخت دیوار هستند. با سقف ها و دیوارهای ساخته شده، می توان ساختمان سه بعدی را بازسازی کرد. برای یک ساختمان سه بعدی با سقف های مسطح، ویژگی های جهانی می تواند سقف یا دیوار باشد زیرا سقف و دیوار می توانند برای ساخت یکدیگر استفاده شوند. در الگوریتم پیشنهادی،
در این رویکرد، فقط ویژگیهای کلی باید ساده شوند در حالی که بقیه از ویژگیهای جهانی ساخته میشوند. به عنوان مثال، برای یک ساختمان سه بعدی با سقف های شیبدار که ویژگی های کلی آن سقف است، فقط سقف ها ساده شده و دیوارها از سقف ها ساخته می شوند. به این ترتیب، محاسبات در مقایسه با سادهسازی سقفها و دیوارها بسیار کارآمدتر است. علاوه بر این، از آنجایی که الگوریتم های فردی برای این دو نوع ساختمان سه بعدی بر اساس ویژگی های هندسی آنها طراحی شده است، این رویکرد می تواند ساختمان های سه بعدی را به شیوه ای موثرتر ساده کند.
شکل 1 نمودار جریان رویکرد پیشنهادی را نشان می دهد. مرحله اول نوع سقف یک ساختمان سه بعدی را تشخیص می دهد. بر اساس نتیجه مرحله اول، رویکرد پیشنهادی یک شاخه مربوطه را برای سادهسازی یک ساختمان سه بعدی انتخاب میکند. برای یک ساختمان سه بعدی با سقف های شیبدار، فرآیند ساده سازی بر توسعه خطوط سقف متمرکز خواهد بود. برای یک ساختمان سه بعدی با سقف های مسطح، فرآیند ساده سازی از ویژگی های توپولوژیکی برای توسعه لبه های نماینده استفاده می کند. در بخش های زیر، جزئیات هر مرحله به تفصیل توضیح داده خواهد شد.
2.1. تشخیص نوع سقف
رویکرد پیشنهادی نوع سقف یک ساختمان سه بعدی را با بررسی ارتفاع، مساحت و شیب تمام مشهای آن تشخیص میدهد. برای اینکه یک مش به عنوان مش سقف شیبدار شناسایی شود، پایین ترین راس آن باید بالاتر از ارتفاع بحرانی باشد، مساحت باید بزرگتر از یک منطقه بحرانی باشد، و شیب باید در یک بازه باشد. در این مقاله ارتفاع بحرانی یک سوم ارتفاع ساختمان سه بعدی و ناحیه بحرانی 25.0 تعیین شده است. فاصله بین 0.0 تا 45.0 درجه است. این مقادیر بحرانی و فاصله به صورت تجربی با توجه به اندازه ساختمانهای سهبعدی تعیین میشوند، که برای ساختمانهای سهبعدی که ما آزمایش کردهایم خوب عمل میکند. فرآیند شناسایی تا زمانی که تمام مش ها بررسی شوند تکرار می شود. اگر رویکرد پیشنهادی بیش از چهار مش را مشخص کند، تعداد مش سادهترین سقف شیبدار (مثلاً باسن هرمی)، ساختمان دارای سقف های شیبدار در نظر گرفته می شود. در غیر این صورت دارای سقف های مسطح در نظر گرفته می شود.
2.2. یک ساختمان سه بعدی با سقف های شیبدار را ساده کنید
هنگامی که یک ساختمان سه بعدی با سقف های شیبدار شناسایی شد، الگوریتم ساده سازی از شبکه های سقف استخراج شده در مرحله شناسایی انواع سقف برای ساده سازی سقف ها، استخراج خطوط سقف و بازسازی ساختمان سه بعدی ضد آب استفاده می کند. در شکل 2 a-d، نمونه ای از یک ساختمان سه بعدی پیچیده با چهار سقف شیبدار و نتایج اجرای الگوریتم پیشنهادی ارائه شده است. در زیر، این سه مرحله اضافی، یعنی ساده سازی سقف ها، استخراج خطوط سقف، و بازسازی ساختمان سه بعدی ضد آب، توضیح داده شده است.
- (1)
-
استخراج و ساده سازی سقف ها
مش های سقف استخراج شده در هنگام تشخیص انواع سقف برای ساده سازی سقف ها استفاده می شود. در واقع، در حین استخراج مش های سقفی، سقف ها قبلاً تا حدی ساده شده اند زیرا مش های کوچکی که نمایانگر سازه های ناچیز مانند دودکش ها، سقف های بی اهمیت هستند حذف شده اند. برای ساده سازی بیشتر، الگوریتم پیشنهادی شامل چهار مرحله است. ابتدا طبقه بندی مش های سقف استخراج شده انجام می شود. مش های سقفی که در یک صفحه قرار می گیرند در یک گروه طبقه بندی می شوند. رأس مش های سقف در هر گروه استخراج و ذخیره می شود. علاوه بر این، صفحاتی که هر گروه از مش های سقفی در آنها قرار می گیرند ساخته و ذخیره می شوند. دوم، یک الگوریتم حداقل بدنه محدب (MCH) برای هر گروه از رئوس اعمال می شود تا مش های سقف را ساده کند. به طور خاص، الگوریتم MCH به صورت دو بعدی انجام می شود، به عنوان مثال، مقدار ارتفاع هر رأس برای کاهش بار محاسباتی در اکتساب MCH شرکت نمی کند. به منظور به دست آوردن مقادیر ارتفاع برای رئوس MCH، یک پرتو عمودی که از هر راس MCH به سمت جهت سقف (یعنی به سمت بالا) امتداد مییابد، ساخته میشود تا با صفحه مربوطه قطع شود، که این گروه از مشهای سقفی در آن قرار دارند. سوم، یک الگوریتم حداقل مستطیل مرزی (MBR) برای نتیجه اجرای MCH اعمال می شود. اگر سطح همپوشانی MCH و MBR بزرگتر از درصد بحرانی باشد که در این مقاله 80٪ تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نشان دادن مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند. به منظور به دست آوردن مقادیر ارتفاع برای رئوس MCH، یک پرتو عمودی که از هر راس MCH به سمت جهت سقف (یعنی به سمت بالا) امتداد مییابد، ساخته میشود تا با صفحه مربوطه قطع شود، که این گروه از مشهای سقفی در آن قرار دارند. سوم، یک الگوریتم حداقل مستطیل مرزی (MBR) برای نتیجه اجرای MCH اعمال می شود. اگر سطح همپوشانی MCH و MBR بزرگتر از درصد بحرانی باشد که در این مقاله 80٪ تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نشان دادن مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند. به منظور به دست آوردن مقادیر ارتفاع برای رئوس MCH، یک پرتو عمودی که از هر راس MCH به سمت جهت سقف (یعنی به سمت بالا) امتداد مییابد، ساخته میشود تا با صفحه مربوطه قطع شود، که این گروه از مشهای سقفی در آن قرار دارند. سوم، یک الگوریتم حداقل مستطیل مرزی (MBR) برای نتیجه اجرای MCH اعمال می شود. اگر سطح همپوشانی MCH و MBR بزرگتر از درصد بحرانی باشد که در این مقاله 80٪ تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نشان دادن مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند. رو به بالا) برای تقاطع با صفحه مربوطه ساخته شده است که این گروه از مش های سقفی در آن قرار دارند. سوم، یک الگوریتم حداقل مستطیل مرزی (MBR) برای نتیجه اجرای MCH اعمال می شود. اگر سطح همپوشانی MCH و MBR بزرگتر از درصد بحرانی باشد که در این مقاله 80٪ تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نشان دادن مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند. رو به بالا) برای تقاطع با صفحه مربوطه ساخته شده است که این گروه از مش های سقفی در آن قرار دارند. سوم، یک الگوریتم حداقل مستطیل مرزی (MBR) برای نتیجه اجرای MCH اعمال می شود. اگر سطح همپوشانی MCH و MBR بزرگتر از درصد بحرانی باشد که در این مقاله 80٪ تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نشان دادن مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند. که در این مقاله 80 درصد تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نمایش مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند. که در این مقاله 80 درصد تعیین شده است، MBR به عنوان چند ضلعی ساده شده برای نمایش مش های سقف استفاده می شود. در غیر این صورت از MCH استفاده می شود. چهارم، MCH/MBR برای هر گروه به مش های مثلثی تقسیم می شود تا فرمت داده را برآورده کند. مش های مثلثی مش های نهایی سقف هستند.
- (2)
-
استخراج خطوط سقف
خطوط سقف به لبه های سقف خاصی اشاره دارد که برای ساخت مش های دیوار استفاده می شود. دلیل استخراج خطوط سقف از مش های سقف نهایی به جای استفاده از تمام لبه های سقف برای ساخت مش های دیوار، صرفه جویی در حجم داده ها است. علاوه بر این، لبه های سقف منظم بر ظاهر کلی ساختمان سه بعدی بازسازی شده تأثیر نمی گذارد. روش اتخاذ شده در اینجا به دنبال لبه هایی است که با دو معیار حذف مطابقت دارند. معیار اول از ماهیت دقیق این لبه ها بهره می برد، یعنی هر لبه در خطوط سقف به دیوار نزدیک است یا حتی با دیوار مشترک است و بنابراین حداقل یکی از دو نقطه پایانی که چنین لبه ای را تشکیل می دهد باید پایین ترین باشد. راس توری سقف حاوی چنین لبه ای است زیرا دیوارها زیر سقف هستند. به این ترتیب، «رج» سقف (در شکل 3 به صورت خطوط چین نشان داده شده است) می تواند حذف شود. معیار دوم طولانی ترین لبه یک لبه مش را مشخص می کند (در شکل 3 با خطوط نازک نشان داده شده است ). از آنجایی که هر لبه ای با دو مش سقف مشترک است، قطعاً خطوط سقف نیست و باید برداشته شود. توجه داشته باشید که شکل 2 ب و شکل 3 داده های مشابهی را در حالت های مختلف نشان می دهند. شکل 3 حالت wireframe است در حالی که شکل 2 b حالت مش است.
- (3)
-
بازسازی ساختمان سه بعدی ضد آب
خطوط سقف به دست آمده در مرحله قبل برای بازسازی یک ساختمان سه بعدی ضد آب استفاده می شود که به این معنی است که هیچ شکافی بین شبکه های دیوار و سقف آن وجود ندارد. بازسازی یک ساختمان سه بعدی ضد آب فرض می کند که ارتفاع زمین صفر است، و سپس خطوط سقف را به صورت قائم به زمین می فرستد تا خطوط زمین مربوطه را ایجاد کند (یعنی پلان زمین یا مرز زمین). سپس هر لبه در خطوط سقف و لبه منطبق با آن از نظر املائی در خطوط زمین برای ساخت یک شبکه مستطیلی که نمایانگر یک دیوار است استفاده می شود. از آنجایی که طرح مورد استفاده در روش پیشنهادی به صورت قائم است، دیوار ساخته شده به صورت عمودی نسبت به زمین است که باعث می شود دیوارهای غیرعمودی به صورت عمودی تصحیح شوند. به عبارت دیگر، روش پیشنهادی می تواند ساختمان های سه بعدی با دیوارهای غیر عمودی را مدیریت کند. هر مش مستطیلی که نمایانگر یک دیوار است، بعداً به دو شبکه مثلثی تقسیم می شود تا با فرمت Autodesk 3ds Max مطابقت داشته باشد. با ترکیب مش های دیواری ساخته شده با مش های سقفی که برای استخراج خطوط سقف استفاده می شود، یک ساختمان سه بعدی ضد آب بازسازی می شود.
2.3. یک ساختمان سه بعدی را با سقف های مسطح ساده کنید
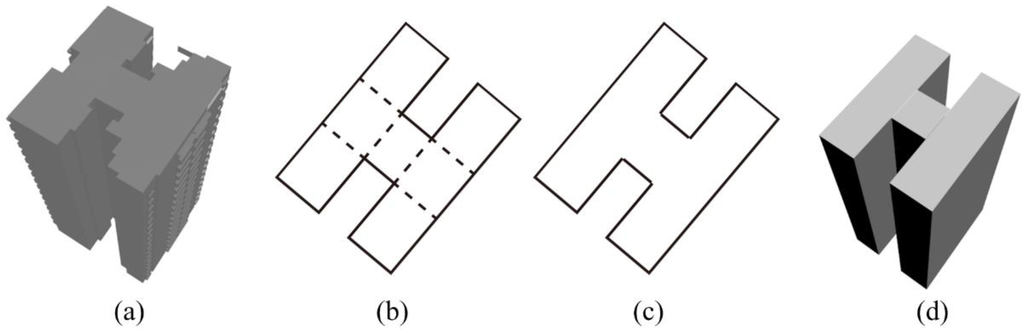
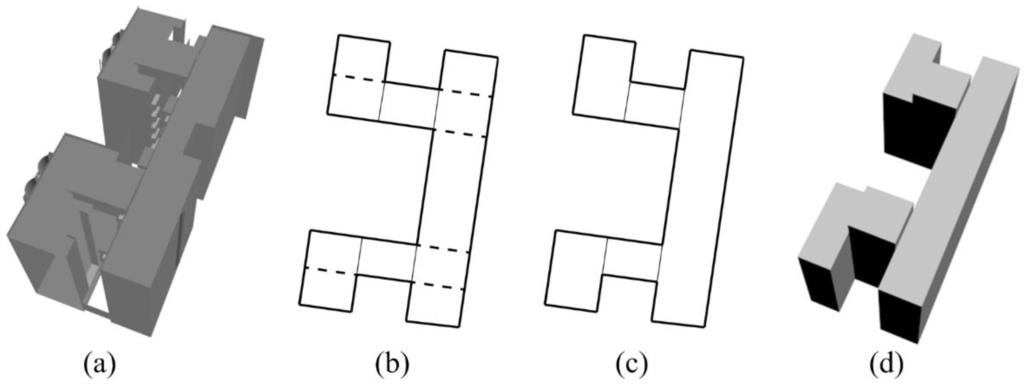
روش پیشنهادی یک ساختمان سه بعدی با سقف های مسطح بر اساس دیوارهای آن را به دو دلیل ساده می کند. اول، دیوارهای آن ویژگی های جهانی هستند که به عنوان پایه ای برای بازسازی ساختمان سه بعدی عمل می کنند. دوم، مساحت دیوارها به عنوان ورودی در فرآیند ساده سازی ساختمان سه بعدی مورد نیاز است. این فرآیند شامل سه مرحله است: (1) تقسیم مستطیل مرزی پلان زمین ساختمان بر اساس مش دیوارها و شناسایی چند ضلعی های واقع در داخل ساختمان سه بعدی. (2) استخراج لبه های نماینده از چند ضلعی. و (3) بازسازی ساختمان سه بعدی ضد آب. شکل 4 a-d نمونه ای از یک ساختمان سه بعدی با سقف های مسطح و نتیجه هر مرحله را نشان می دهد.
- (1)
-
تقسیم بندی مستطیل مرزی پلان زمین ساختمان و شناسایی چند ضلعی های واقع در داخل ساختمان سه بعدی
این مرحله با استخراج مش های دیواری ساختمان سه بعدی شروع می شود. این یک فرآیند ساده با شناسایی مش هایی با شیب بین 60 تا 90 درجه است. شبکه های دیواری که بدین ترتیب شناسایی شده اند، متعاقباً بر اساس منطقه به ترتیب نزولی مرتب می شوند. اولین مش در مجموعه مش های دیواری مرتب شده به عنوان نماینده ترین مش دیوار ساختمان سه بعدی در نظر گرفته می شود زیرا از نظر بصری با بیشترین مساحت برجسته است.
پس از آن مجموعه مش های دیواری مرتب شده در معرض اتصالات اصلی قرار می گیرد. این روش با اولین مش در مجموعه شروع می شود. این شامل دو مرحله است، یعنی ساختن صفحه اصلی مش، که با Ax + By + Cz + D = 0 نشان داده می شود، از مختصات سه رأس آن، و بررسی تمام مش های بعدی در مجموعه که آیا آنها در داخل هستند یا خیر. یک شعاع بافر از پیش تعریف شده مواردی که در منطقه بافر هستند از مجموعه حذف می شوند زیرا می توانند به عنوان ویژگی های جزئی ساختمان ها در نظر گرفته شوند و مجموعه به روز می شود. از نظر ریاضی، منطقه بافر یک صفحه اصلی بین Ax + By + Cz + D 1 = 0 و Ax + By + Cz + D 2 = 0 است که در آن D 1 = D – D buf , D 2= D + D buf و D buf نشان دهنده فاصله بافر است که می تواند توسط کاربران بر اساس درک آنها از ساختمان سه بعدی از قبل تعیین شود. معادله صفحه باید با اطمینان از اینکه A 2 + B 2 + C 2 = 1 نرمال سازی شود تا بتوان D buf را در معادلات صفحه مختلف مقایسه کرد. یک مش در داخل ناحیه بافر باید شرایط (Ax + By + Cz + D 1 ) × (Ax + By + Cz + D 2 ) < 0 را برآورده کند. پس از تکمیل اولین مش، کل روش برای هر یک از مش های باقی مانده تکرار می شود. در مجموعه به روز شده تا آخرین مش بررسی می شود.
صفحات اصلی که به این ترتیب ساخته می شوند، مبنایی را تشکیل می دهند که می توان خطوط اصلی را از آن استخراج کرد. این کار با حذف عبارت y در معادله صفحه اصلی Ax + By + Cz + D = 0 انجام می شود. مراحل زیر در شکل 4 ب، خطوط اصلی که به این ترتیب ساخته شده اند، تمام لبه ها هستند.
خطوط اصلی به دست آمده برای تقسیم مستطیل مرزی پلان زمین ساختمان استفاده می شود. مستطیل مرزی ابتدا با به دست آوردن جعبه مرزی ساختمان سه بعدی و سپس انداختن بعد ارتفاع بازیابی می شود. برای تقسیم مستطیل مرزی، خطوط اصلی ساختمان سه بعدی توسعه یافته در مرحله قبل از طریق یک فرآیند تقاطع می گذرد تا به تدریج مستطیل مرزی را تقسیم کند.
از آنجایی که همه چند ضلعی های حاصل از تلاقی خطوط اصلی و مستطیل مرزی در داخل ساختمان سه بعدی قرار ندارند، شناسایی آنها ضروری است. این فرآیند شامل سه مرحله است. ابتدا مش های ساختمان سه بعدی به استثنای مش های دیواری استخراج می شوند. دوم، مرکز هر چند ضلعی محاسبه می شود. سوم، یک پرتو عمودی که از هر نقطه مرکزی به سمت سقف امتداد می یابد (یعنی به سمت بالا) ساخته می شود. اگر پرتو عمودی در مرحله شناسایی انواع سقف با هر یک از شبکه های استخراج شده تقاطع پیدا کند، که به معنای قرار گرفتن چند ضلعی متناظر آن در داخل ساختمان سه بعدی است، چند ضلعی و همچنین ارتفاع نقطه تقاطع حفظ می شود. ما این چند ضلعی ها را چند ضلعی داخلی می نامیم. اگر پرتو عمودی با بیش از یک مش استخراج شده تقاطع پیدا کند، تنها بزرگترین مقدار ارتفاع حفظ می شود. چند ضلعی های حفظ شده و ارتفاعات مربوط به آنها برای بازسازی ساختمان سه بعدی استفاده می شود. نتیجه شناسایی شده در نشان داده شده استشکل 4 ب.
- (2)
-
استخراج لبه های نماینده
از لبه های معرف چند ضلعی های مشخص شده در مرحله قبل برای ساخت مش های دیواری ساختمان سه بعدی استفاده می شود. در اینجا لبههای معرف به لبههایی اشاره میکنند که مشهای دیواری ساختهشدهشان بر ظاهر کلی ساختمان سهبعدی بازسازیشده تأثیر میگذارد. در شکل 5 که در آن یک ساختمان نمونه با سقف هایی با ارتفاع یکنواخت نشان داده شده است ( شکل 5 الف)، لبه های معرف با خطوط در حالی که لبه های معمولی با خطوط چین نمادین شده اند ( شکل 5 ب). پس از شناسایی، این لبه های نماینده استخراج می شوند ( شکل 5 ج) برای ساخت شبکه های دیوار. توجه داشته باشید که لبه هایی که با خطوط چین نمادین شده اند با دو چند ضلعی مجاور مشترک هستند. همانطور که از شکل 5 مشاهده می شودب، لبه های معمولی بر ظاهر کلی ساختمان سه بعدی بازسازی شده تأثیر نمی گذارد ( شکل 5 د) زیرا مش های دیواری ساخته شده آنها در داخل ساختمان سه بعدی بازسازی شده قرار می گیرند. برای ساختمان سه بعدی با ارتفاع یکنواخت، لبه های معرف اینها هستند که پلان زمین را تشکیل می دهند زیرا مش دیوارهای ساخته شده آنها بخشی از ظاهر کلی ساختمان سه بعدی بازسازی شده را نشان می دهد.
در حالی که لبه های مشترک برای سقف های ساختمان با ارتفاع یکنواخت، لبه های معمولی هستند، ممکن است لبه هایی برای سقف های ساختمانی با ارتفاع های متعدد باشند. شکل 6 یکی از این نمونه ها را نشان می دهد. هر دو یال که با خطوط نازک و خطوط بریده در شکل 6 b نماد شده اند، توسط چند ضلعی های مجاور مشترک هستند. با این حال، لبههایی که با خطوط نازک نمادین شدهاند، لبههای نشاندهنده هستند در حالی که لبههایی که با خطوط چین نمادین شدهاند، لبههای معمولی هستند. دلیل آن این است که این لبه ها که با خطوط نازک نمادین شده اند در محل برخورد چند ضلعی های مجاور با ارتفاع های مختلف قرار دارند. از ساختمان سه بعدی بازسازی شده در شکل 6d، لبه هایی که با یک خط نازک نمادین شده اند، نماینده هستند زیرا مش های دیواری ساخته شده آنها بخشی از ظاهر کلی را نشان می دهد. بدون شبکه های دیواری ساخته شده توسط لبه های نمادین با خطوط نازک، ساختمان سه بعدی دارای “سوراخ” خواهد بود. تصویری که مش های دیوار در زیر لبه های نماد شده با خطوط نازک در شکل 6 d وجود ندارد، پس ساختمان سه بعدی بسته نشده است. شکاف هایی در زیر لبه ها وجود دارد که نماد آنها با خطوط نازک است که به آنها “سوراخ” می گویند.
روش استخراج لبه های نماینده به شرح زیر است. ابتدا یک ساختار داده برای لبه ها طراحی می کنیم که شامل یک نقطه شروع، یک نقطه پایان و یک ارتفاع است. دلیل ساخت یک ساختار داده جدید این است که این سه متغیر در ساختار داده می توانند مقادیر لازم برای بازسازی یک ساختمان سه بعدی ضد آب را در مرحله زیر ذخیره کنند. ارتفاع برای لبه ها برای بازسازی ساختمان سه بعدی در نظر گرفته شده است زیرا لبه ها فقط دارای اطلاعات دو بعدی هستند. دوم، این روش دو نوع لبه نماینده برجسته شده در بالا را استخراج می کند، به عنوان مثال، لبه های یک پلان زمین یا لبه هایی که دو چند ضلعی مشترک آنها دارای ارتفاع متفاوت هستند. برای استخراج اولین نوع یال، از ویژگیهای توپولوژیکی استفاده میشود که یالهایی را تشکیل میدهند که پلان زمین متعلق به تنها یک چند ضلعی است. به طور خاص، هنگام تشخیص اینکه آیا یک یال به یک پلان زمین تعلق دارد یا خیر، این روش تعداد چند ضلعی های حاوی این یال را می شمارد. اگر عدد یک باشد، این یال را استخراج می کنیم (یعنی نقطه شروع و پایان این یال را در ساختار لبه ذخیره می کنیم) و ارتفاع چند ضلعی را در ساختار لبه ذخیره می کنیم. در غیر این صورت، یک یال است که توسط دو چند ضلعی مجاور مشترک است. برای چنین لبهای، تنها لبه مشترک چند ضلعی با ارتفاعهای مختلف استخراج میشود و ارتفاع بزرگتر در ساختار لبه ذخیره میشود.
- (3)
-
بازسازی ساختمان سه بعدی ضد آب
بازسازی یک ساختمان سه بعدی ضد آب با سقف های مسطح تقریباً مشابه با سقف های شیبدار است. همچنین بر این فرض استوار است که ارتفاع پلان زمین صفر است. لبه های نماینده استخراج شده در مرحله قبل برای بازسازی ساختمان سه بعدی استفاده می شود. از آنجایی که آنها ارتفاع دیوارها را شامل می شوند، می توانیم لبه های خطوط سقف را ایجاد کنیم. به عنوان مثال، ارتفاع یک یال در پلان زمین صفر است. با ویرایش ارتفاع به اندازه ارتفاع ذخیره شده در سازه لبه، لبه مربوط به خطوط سقف ساخته می شود. سپس از لبه در پلان زمین و لبه مربوط به آن در خطوط سقف می توان برای ساخت شبکه های دیواری برای ساختمان سه بعدی استفاده کرد. این دو لبه یک شبکه مستطیل شکل را تشکیل می دهند که عمودی به زمین است. این اثر تصحیح دیوارهای غیر عمودی را به عنوان دیوارهای عمودی به دست می آورد. به عبارت دیگر، الگوریتم پیشنهادی می تواند ساختمان های سه بعدی با دیوارهای غیر عمودی را اصلاح کند. این مش مستطیلی به دو مش مثلثی تقسیم می شود تا با فرمت Autodesk 3ds Max مطابقت داشته باشد. هنگام ساخت سقف های مسطح، از چند ضلعی های داخلی شامل ارتفاع های مشخص شده در مرحله (1) استفاده می کنیم. این چند ضلعی ها نیز باید به مش های مثلثی تبدیل شوند.
3. نتایج تجربی
دو مطالعه موردی برای آزمایش اثربخشی رویکرد سادهسازی پیشنهادی انجام شد. اولین مطالعه موردی توانایی رویکرد پیشنهادی را در سادهسازی ساختمانهای فردی در سطوح مختلف پیچیدگی در حالی که ظاهر اصلی آنها را حفظ میکند، ارزیابی میکند. این ساختمان های سه بعدی معمولی به صورت رایگان به صورت آنلاین در دسترس هستند (به عنوان مثال، انبار سه بعدی [ 34 ]). مطالعه موردی دوم توانایی رویکرد پیشنهادی را در مدیریت ساختارهای مختلف ساختمانها در یک بخش از شهر ارزیابی میکند. ساختمان های سه بعدی در اطراف Shenton Way، سنگاپور ایجاد شده توسط MAGIC [ 35 ] برای هدف ذکر شده استفاده می شود.
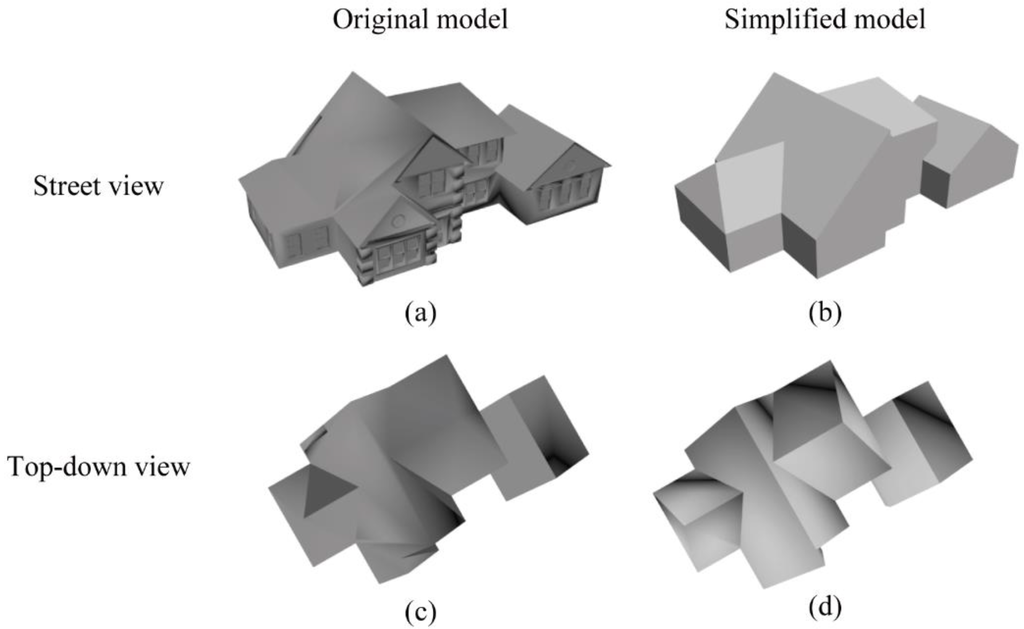
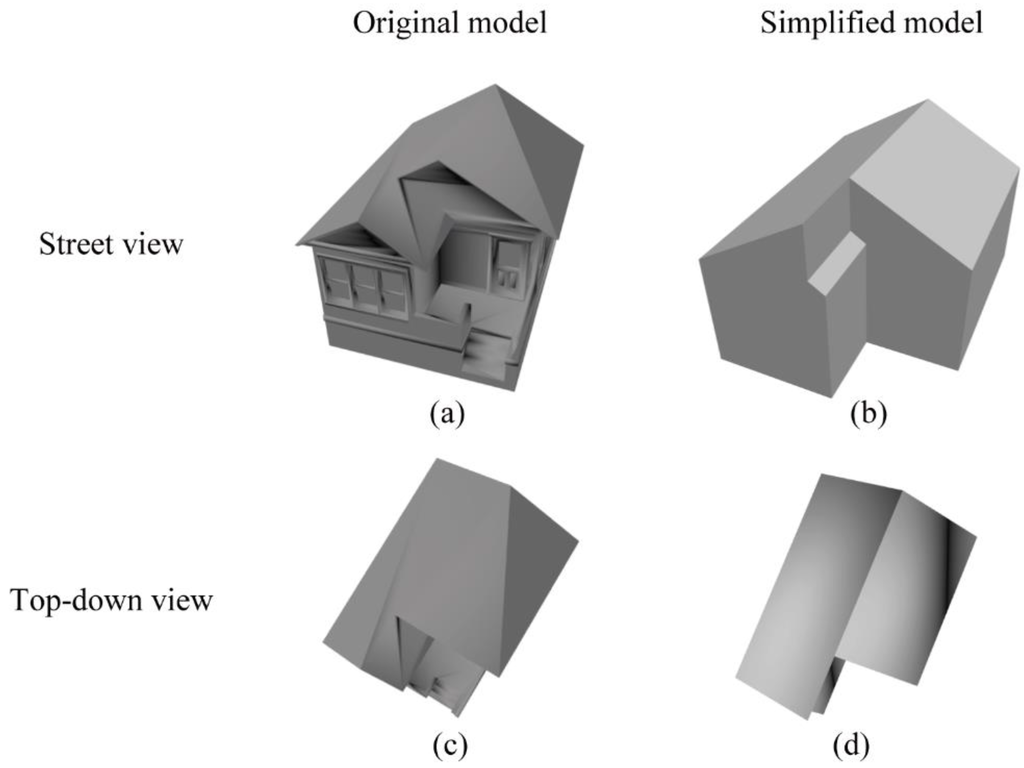
با توجه به مقیاس های مختلف دو مطالعه موردی، به عنوان مثال، یکی در مقیاس ساختمان 3 بعدی فردی در حالی که دیگری در مقیاس شهر است، دو مطالعه موردی قابلیت های متفاوتی از الگوریتم های ساده سازی پیشنهادی را نشان می دهند. در مطالعه موردی اول، ساختمانهای سه بعدی با LOD بالا (مثلا LOD3) که بیشترین ویژگیهای ظاهر کلی را حفظ میکنند به صورت جداگانه نشان داده میشوند. توانایی حفظ ظاهر کلی را می توان به راحتی با مقایسه یک جفت ساختمان سه بعدی متشکل از ساختمان سه بعدی ساده شده در LOD3 و همتای اصلی آن در کنار هم و از دو نما شناسایی کرد: (1) نمای از بالا به پایین که نشان می دهد ساده سازی سقف ها و پلان های زمین و (2) نمای خیابان که ساده سازی سقف ها و سازه های دیوار را نشان می دهد. در مطالعه موردی دوم، منظره شهر در چند لود در نمای خیابان برای مشاهده تغییرات در ظاهر کلی نشان داده شده است. چنین انتخاب مقایسه بصری مبتنی بر این واقعیت است که شناخت گروه های ساختمانی سه بعدی بیشتر به حفظ ظاهر و الگوهای گروه های ساختمانی سه بعدی بستگی دارد تا ظاهر ساختمان های سه بعدی جداگانه.
3.1. ساده سازی ساختمان های سه بعدی معمولی
در مطالعه موردی اول، نمونههایی از ساختمانهای سه بعدی با سقفهای شیبدار و سقفهای مسطح مورد بررسی قرار گرفت. شناخت این دو نوع سقف مهم است زیرا آنها ویژگی های کلی را تعیین می کنند، یعنی سقف برای ساختمان های سه بعدی با سقف های شیبدار و دیوار برای ساختمان های سه بعدی با سقف های مسطح، که الگوریتم ساده سازی پیشنهادی روی آنها عمل می کند. بنابراین، نمونههای آزمایشی مورد بررسی، سطوح مختلفی از پیچیدگی سقف و دیوار را شامل میشوند.
برای ساختمان های سه بعدی با سقف های شیبدار، سه نمونه با پیچیدگی سقف متفاوت ارائه شده است ( شکل 2 ، شکل 7 و شکل 8 ). برای وضوح، ساختمان های سه بعدی اصلی و همتایان ساده شده هم در نمای خیابان و هم در نمای بالا به پایین نشان داده شده اند. برای ساختمان سه بعدی در شکل 2از نظر پیچیدگی سقف شامل چهار سقف شیبدار در دو جهت، یک دودکش و دو سقف شیبدار کوچک است. از نظر پیچیدگی دیوار، ساختمان سه بعدی شامل دیوارها، نرده ها، پله ها، پنجره ها و سازه های داخلی است. برای چنین ساختمان سه بعدی پیچیده ای، هر رویکرد ساده سازی که تلاش می کند سقف و دیوار را با هم مدیریت کند، ناگزیر وقت گیر خواهد بود. از آنجایی که الگوریتم پیشنهادی با ویژگیهای جهانی کار میکند، یعنی سقفهای ساختمانهای سه بعدی با سقفهای شیبدار، کارآمدتر خواهد بود. پس از سادهسازی، سازههای فرعی و محلی مانند دودکش و سقفهای شیبدار کوچک حذف میشوند و سازههای غالب و جهانی مانند سقفها در دو جهت که نمای کلی ساختمانهای سه بعدی را نشان میدهند حفظ میشوند. دیوارهای پیچیده با ساختارهای ساده نشان داده شده است. برای ساختمان سه بعدی درشکل 7 ، از نظر پیچیدگی سقف، چهار سقف در دو جهت وجود دارد. سازه های هر سقف متفاوت است که شیروانی و لگن هستند. از نظر پیچیدگی دیوار، دیوارها، پنجرهها، درها و سازههای بیاهمیت مختلف را در بر میگیرد. پس از ساده سازی، سقف ها حفظ می شوند در حالی که ساختارهای پیچیده دیوارها با دیوارهای ساده جایگزین می شوند. شکل 8 یک ساختمان سه بعدی را نشان می دهد که شامل دو سقف در جهت یکسان است. با مقایسه سقف های ساختمان سه بعدی اصلی با نمونه ساده شده آن، به ویژه در نمای بالا به پایین، می توان دریافت که سقف های غیر محدب (قسمت سمت چپ در شکل 8)ج، د) به عنوان MBR آنها ساده شده است. علاوه بر این، ساختارهای بسیار ساده شده دیوارها هستند حتی اگر الگوریتم پیشنهادی واقعاً داده های هندسی را برای نمایش دیوارها لمس نمی کند.
برای ساختمان های سه بعدی با سقف های مسطح، سه نمونه با پیچیدگی دیوارهای مختلف نشان داده شده است ( شکل 5 ، شکل 9 و شکل 10 ). در شکل 5 ، ساختمان سه بعدی شامل دو بلوک با ارتفاع یکسان و بالکن های متعدد است. پس از ساده سازی، دو بلوک حفظ می شوند و بالکن ها حذف می شوند. شکل 9یک ساختمان سه بعدی را نشان می دهد که شامل بلوک های متعدد با ارتفاع های مختلف، بالکن های متعدد و سازه های نیم استوانه ای است. علاوه بر این، یک سطح از یک بلوک از دست رفته است، که باعث ایجاد حفره ای در ساختمان سه بعدی می شود و بنابراین یک مورد از داده های ناقص را نشان می دهد. با این حال، الگوریتم پیشنهادی همچنان می تواند آن را با یک نتیجه رضایت بخش ساده کند. بنابراین استحکام الگوریتم پیشنهادی تأیید می شود. در اینجا “نتیجه رضایت بخش” به این معنی است که ظاهر کلی (یعنی بدنه های اصلی) ساختمان سه بعدی پس از ساده سازی حفظ می شود. به طور خاص، همپوشانی حجمی دو ساختمان سه بعدی (یعنی ساختمان های سه بعدی اصلی و ساده شده) زیاد است. در شکل 10، ساختمان سه بعدی شامل بلوک های متعددی است که جهت گیری آنها دائماً مانند یک پیچ و خم تغییر می کند و بالکن های متعدد. پس از ساده سازی، “پیچ و خم” حفظ می شود.
به طور کلی، برای ساختمانهای سه بعدی با سقفهای شیبدار یا مسطح، ساختمانهای سهبعدی ساده شده با حفظ بدنههای اصلی و حذف ویژگیهای جزئی با توجه به مقایسه ساختمانهای سهبعدی سادهشده و مشابههای اصلی، نمای کلی نمونههای اصلی را نشان میدهند.
جدول 1 کاهش حجم داده اندازه گیری شده توسط تعداد رئوس و مش های مثلثی را نشان می دهد. از جدول، حداقل نرخ کاهش حجم داده برای همه مدل های آزمایش شده 47.0٪ در شکل 10 است . این احتمالاً به این دلیل است که ساختمان اصلی سه بعدی شامل ویژگی های دقیق نیست. به جز این ساختمان سه بعدی، نرخ کاهش حجم داده سایر ساختمان های سه بعدی همه بالاتر از 87.0 درصد است. به طور خاص، ساختمان های سه بعدی در شکل 2 و شکل 7 ، شکل 8 و شکل 9دستیابی به نرخ کاهش حجم داده 98.3٪ و بالاتر. با مشاهده ویژگیهای ساختمانهای سهبعدی نشاندادهشده در شکلهای مربوطه، میتوان چنین استنباط کرد که چنین کاهش حجم عظیمی از دادهها ناشی از قانون اساسی سادهسازی ساختمانهای سهبعدی است: نمایانگر نمای کلی ساختمان سه بعدی با کمترین تعداد مش امکان پذیر است، به ویژه برای این ساختمان های سه بعدی اصلی که دارای ویژگی های نسبتاً پیچیده و دقیق هستند. با سادهسازی، این ویژگیهای پیچیده و دقیق، که حجم عظیمی از دادهها را اشغال میکنند، حذف میشوند در حالی که بدنههای اصلی ساختمانهای سهبعدی حفظ میشوند.
3.2. ساده سازی مناظر شهری
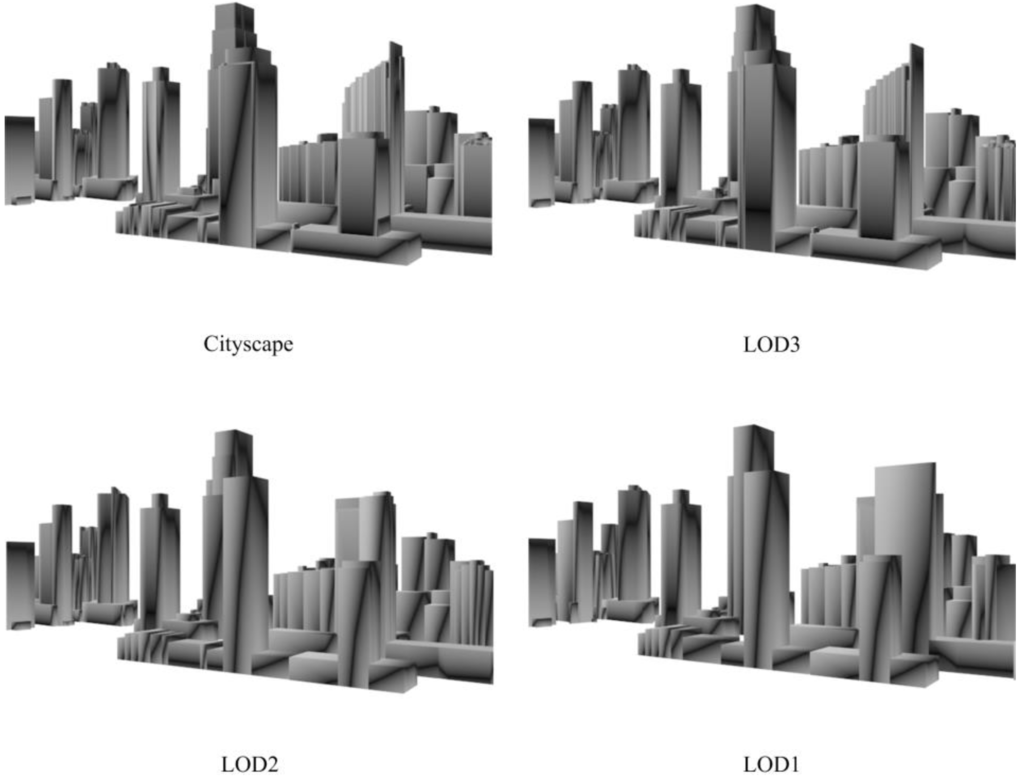
مطالعه موردی دوم، سادهسازی چند مقیاسی منظر شهری (یعنی 411 ساختمان سه بعدی در شنتون وی، سنگاپور) را بررسی کرد. هدف مطالعه موردی ارزیابی عملکرد رویکرد پیشنهادی در مقیاس شهر است، که مجدداً با قابلیت آن در حفظ ظاهر بصری در حین دستیابی به نرخ کاهش داده قابل توجهی اندازهگیری میشود.
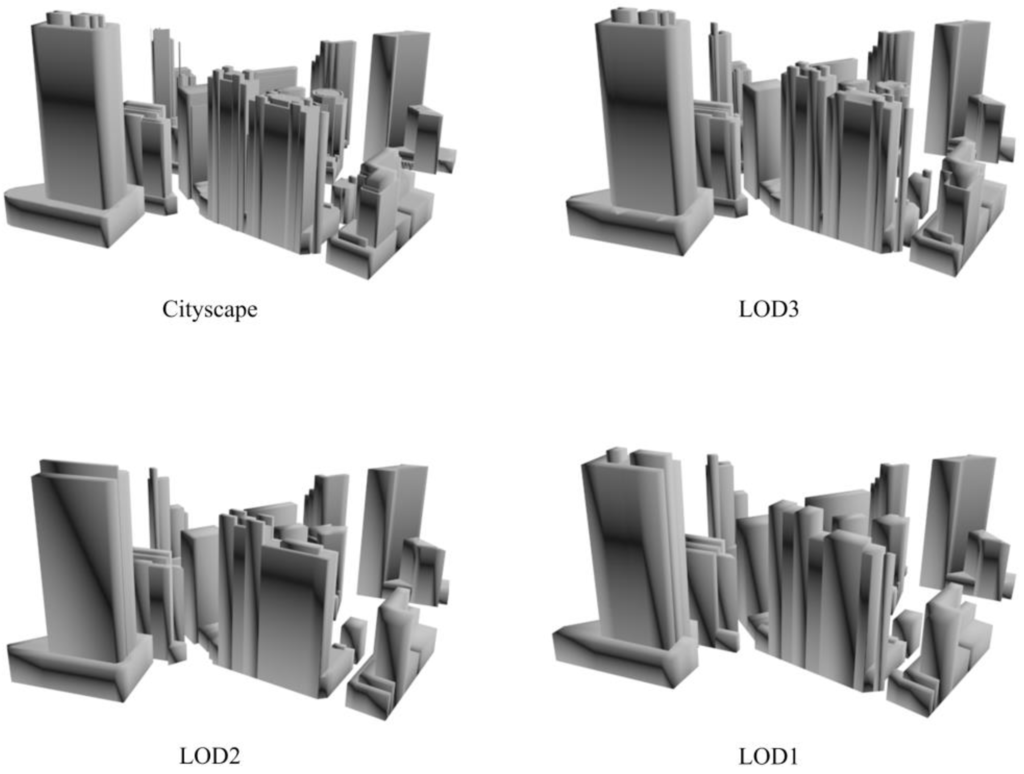
شکل 11 و شکل 12 دو نمونه از ساده سازی چند مقیاسی منظر شهری را نشان می دهد. با اشاره به صحنه های اصلی، سه صحنه ساده شده در هر زیرشکل تفاوت بصری آشکاری را نشان نمی دهند، که نشان می دهد رویکرد پیشنهادی قادر است ظاهر بصری کلی منظر شهری را حتی با LOD کم (مثلا LOD1) حفظ کند. در مقایسه با تجسم منظر شهری با جعبههای محدود ساختمانهای سه بعدی اصلی یا سلولهای ساده (چانگ و همکاران، 2008؛ گلاندر و دولنر، 2009)، منظره شهری چند مقیاسی بهدستآمده با رویکرد ما بسیار واقعیتر است. نرخ کاهش حجم داده ها از 61.1% تا 97% متغیر است ( جدول 2 ). بر اساس نتایج بصری در شکل 11 و شکل 12 و نتایج آمار در جدول 2توانایی روش پیشنهادی تایید شده است که می تواند ظاهر کلی ساختمان های سه بعدی را حفظ کند و در عین حال حجم داده ها را تا حد زیادی کاهش دهد.
4. بحث در مورد مطالعات مسائل شهری با رویکردهای ساده سازی
قابلیت الگوریتمهای سادهسازی برای تولید خودکار 3DCMهای چند مقیاسی که در آن ساختمانها در چندین LOD مدلسازی و ذخیره میشوند، پتانسیلهای زیادی در حمایت از مطالعات مسائل شهری دارند [36 ] . برای ارائه زمینهای که در آن الگوریتمهای سادهسازی مفید هستند، در زیر بحث مختصری در مورد پیادهسازیهای فنی ارائه شده است که از 3DCM برای بهبود پرس و جو داده، بازیابی دادهها و نمایش دادهها (مثلاً مدلسازی مکانی-زمانی) برای مسائل شهری و همچنین استفاده استفاده میکنند. از 3DCM برای مطالعه موضوعات مختلف مرتبط با پایداری شهری.
با توجه به پیادهسازیهای فنی با استفاده از 3DCM، در مطالعه میراث فرهنگی که نیاز به استفاده از دادههای پیچیده مختلف در 3DCM دارد، یک طرح پایگاه داده برای سازماندهی دادهها و پشتیبانی از پرسوجوهای دادهها توسط ویژگیهای هندسی، معنایی و مکانی پیشنهاد شد [37] . ]. علاوه بر برنامه های کاربردی خاص، بهبودهای فنی برای پرس و جو یا مدیریت داده ها، که می تواند در برنامه های کاربردی عمومی اتخاذ شود، نیز اجرا شد. منحنی های پرکننده فضا (منحنی های هیلبرت سه بعدی) برای نمایش داده ها در 3DCM برای بهبود کارایی بازیابی داده ها با بهینه سازی مجاورت سه بعدی، نمایه سازی سه بعدی و اطلاعات نزدیکترین همسایه [38] پیشنهاد شد .]. به طور مشابه، به منظور بهبود توانایی حفظ ثبات داده ها در 3DCM و در نتیجه تسریع بیشتر در بازیابی داده ها برای کاربردهای مختلف، یک مدل 4 بعدی که اشیاء یکسان را در LOD های مختلف در 3DCM به هم پیوند می دهد [39] توسعه یافت . برای مدلسازی مکانی-زمانی، با مدلسازی و مقایسه منظر شهری در عکسهای لحظهای مختلف، میتوان نقشه مدل تغییر ساختمان سه بعدی نهایی را که ساختمانهای تخریبشده و تازهساختشده را نشان میدهد، بهدست آورد. بر اساس نقشه تغییرات سه بعدی، حجم و سطح تغییرات ساختمان کمی سازی شد [ 40 ]. علاوه بر این، یک مدل GIS مکانی-زمانی برای مطالعه تغییرات در شکل فیزیکی شهرها با تجسم انتقال دینامیکی 3DCM در طول زمان ساخته شد [ 41]. برای کاوش تغییرات کلی، نقشههای 4 بعدی برای نشان دادن پدیدههای محیطی مکانی-زمانی طراحی شدند که از تحقیقات اکتشافی پشتیبانی میکنند [ 42 ]. یک مفهوم جدید “dynamizer” برای پشتیبانی از تزریق خواص بسیار پویا و متغیر با زمان به 3DCM پیشنهاد شد، به طوری که تنوع ویژگی ها می تواند برای اکتشاف نمایش داده شود [ 43 ]. از نظر فنی، اصول روش شناختی برای ساخت مناظر شهری گذشته به منظور تجزیه و تحلیل تغییرات شهری و اتصال فرآیندهای دگرگونی ارائه شد [ 44 ].
با توجه به کاربردهای مختلف در پایداری شهری، انبوه مناظر شهری (یعنی ساختمان های سه بعدی در LOD کم) می توانند برای طراحی شهری و برنامه ریزی شهری استفاده شوند [ 45 ]. برای تخمین تابش خورشیدی در محیط های شهری، به جای محدود شدن توسط سطوح دو بعدی (مثلا سطوح سقف تخت)، معرفی 3DCM، همراه با توانایی آن در ارائه داده ها در LOD مناسب، توسعه یک تابش خورشیدی سه بعدی جدید را امکان پذیر کرد. مدلی که هم سقف و هم دیوارهای ساختمان را در نظر می گیرد [ 46]. علاوه بر این، برای برنامهریزی مؤثر ساخت و سازهای پنل خورشیدی یا اقدامات انرژی غیرفعال، درآمد خورشیدی در مقیاسهای چندگانه در نظر گرفته شد. در مقیاس منطقه ای، 3DCM در LOD کم برای ارزیابی درآمد خورشیدی تقریبی استفاده شد در حالی که در مقیاس خانوار، 3DCM در LOD بالا برای برآورد دقیق استفاده شد [47 ] . بر اساس اطلاعات معنایی و هندسی در 3DCM، برآورد تقاضای گرما با در نظر گرفتن انرژی مورد نیاز برای هر ساختمان در مقیاس بزرگ (به عنوان مثال، مقیاس ملی) امکان پذیر است [48 ]]. علاوه بر این، یک مطالعه جامع تر با استفاده از ویژگی های فیزیکی ساختمان، شرایط آب و هوایی محلی، و تعامل آن با ساختمان های همسایه برای ارزیابی تقاضای گرما انجام شد. به طور خاص، برای برآورد تابش خورشیدی و تقاضای گرما، مواد سطحی ساختمانها و فیزیک ساختمان عوامل مهمی هستند زیرا مستقیماً بر جذب و آزاد شدن انرژی تأثیر میگذارند. 3DCMها همچنین کاربردهای خود را در پایداری شهری از طریق مطالعه مورفولوژی شهری و تأثیر آنها بر حمل و نقل شهری [ 49 ] و آب و هوای شهری [ 50 ] می بینند.
5. نتیجه گیری ها
3DCM های چند مقیاسی پتانسیل بزرگ خود را در مطالعه مسائل مختلف شهری نشان داده اند. سادهسازی ساختمانهای سهبعدی، که زیربنای ساخت 3DCMهای چند مقیاسی است و در نتیجه از مطالعات شهری بیشتر پشتیبانی میکند، بدون شک بسیار مهم است. علاوه بر این، سادهسازی ساختمانهای سهبعدی برای تجسم محیط شهری بسیار مهم است، زیرا ساختمانهای سهبعدی «واقعیتر» شدهاند، یعنی با وفاداری بالا، و در نتیجه حجم دادههای زیادی را به همراه دارند. این به کاهش حجم داده ها کمک می کند و در عین حال ظاهر بصری کلی این ساختمان های سه بعدی را، چه در سطح ساختمان های فردی یا یک شهر، حفظ می کند. با رویکردهای سادهسازی، محیطهای شهری را میتوان به شیوهای کارآمد و واقعبینانه تجسم کرد و بنابراین به طور بالقوه توانایی خود را برای خدمت به اهداف مختلف در تصمیمگیری نشان داد.
در این مقاله، یک رویکرد یکپارچه برای ساده سازی ساختمان های سه بعدی پیشنهاد و اجرا شده است. با هدف قرار دادن ساختمان های سه بعدی با سقف های شیبدار یا مسطح، الگوریتم های فردی بر اساس ویژگی های هندسی آنها طراحی می شوند. دو مطالعه موردی، اولی با تمرکز بر پیچیدگی ساختمان های سه بعدی و دومی با تمرکز بر عملکرد ساده سازی در مقیاس شهر، برای ارزیابی اثربخشی رویکرد پیشنهادی انجام شده است. نتایج بصری و آماری هر دو مطالعه موردی نشان میدهد که رویکرد پیشنهادی میتواند ساختمانهای سه بعدی را به گونهای ساده کند که نه تنها نمای کلی ساختمانهای سه بعدی اصلی را نشان میدهد، بلکه حجم دادهها را تا حد زیادی کاهش میدهد.
در حالی که رویکرد پیشنهادی برای مدیریت ساختمانهای سه بعدی با سقفهای شیبدار و مسطح مؤثر است، ممکن است نتواند بهطور کارآمد ساختمانهایی با انواع سقفهای استثنایی، مانند سقفهای گرد را مدیریت کند. تحقیقات بیشتری برای بررسی این انواع سقف مورد نیاز است. علاوه بر این، از آنجایی که این رویکرد بر ارزشهای بحرانی تعیینشده تجربی برای اطمینان از کیفیت سادهسازی متکی است، دانش قبلی از ساختمانهای سه بعدی مورد نیاز است. ساختمانهای سهبعدی از منابع مختلف که در مقیاسهای مختلف توسعه یافتهاند ممکن است قبل از انجام سادهسازی به مقادیر بحرانی متفاوتی نیاز داشته باشند. در نهایت، این رویکرد ساختارهای دقیق را به جز سقف ها و دیوارها شناسایی نمی کند. تحقیقات بیشتری برای بررسی طراحی و گردش کار برای تشخیص ساختارهای مختلف ساختمانهای سه بعدی (مانند پنجرهها و درها) مورد نیاز است. به این ترتیب،
منابع
- وود، جی. کیرشن باوئر، اس. دولنر، جی. لوپس، آ. Bodum, L. استفاده از 3d در تجسم. در Dykes/MacEachren/Kraak (Hrsg.): Exploring Geovisualization ; الزویر: آمستردام، هلند، 2005; صص 295-312. [ Google Scholar ]
- ماس، اس. جابست، ام. Döllner, J. استفاده از نشانه های عمق برای حاشیه نویسی محیط های geo-virtual سه بعدی. در مجموعه مقالات بیست و سومین کنفرانس بین المللی کارتوگرافی، مسکو، روسیه، 4 تا 10 اوت 2007.
- آکسفورد، اس. کلتی، جی. والیس، سی. واقعیت مجازی در برنامه ریزی و طراحی شهری. در کارتوگرافی چند رسانه ای ; Springer: برلین، آلمان، 2007; صص 283-294. [ Google Scholar ]
- ناکایا، تی. یانو، ک. ایزودا، ی. کاواسومی، تی. تکاسه، ی. کیریمورا، تی. سوکاموتو، آ. ماتسوموتو، ا. ستو، تی. Iizuka، T. پروژه کیوتو مجازی: تصویر دیجیتالی از گذشته، حال و آینده شهر تاریخی کیوتو. در فرهنگ و محاسبات ; Springer: برلین، آلمان، 2010; صص 173-187. [ Google Scholar ]
- یاسوموتو، اس. جونز، AP; ناکایا، تی. یانو، ک. استفاده از یک مدل شهر مجازی برای ارزیابی برابری در دسترسی به نماها. محاسبه کنید. محیط زیست سیستم شهری 2011 ، 35 ، 464-473. [ Google Scholar ] [ CrossRef ]
- یاسوموتو، اس. جونز، ا. یانو، ک. ناکایا، تی. مدلهای شهر مجازی برای ارزیابی برابری محیطی در دسترسی به نور خورشید: مطالعه موردی کیوتو، ژاپن. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1-13. [ Google Scholar ] [ CrossRef ]
- وانگ، ال. گرووز، PD; Ziebart، MK چند صورت فلکی ارزیابی عملکرد gnss برای دره های شهری با استفاده از مدل های شهر واقعیت مجازی بزرگ. جی. ناویگ. 2012 ، 65 ، 459-476. [ Google Scholar ] [ CrossRef ]
- چانگ، آر. بوتکیویچ، تی. زیمکیویچ، سی. وارتل، ز. ریبارسکی، دبلیو. پولارد، ن. سادهسازی خوانا مدلهای شهری بافتدار. محاسبات IEEE. نمودار. Appl. 2008 ، 28 ، 27-36. [ Google Scholar ] [ CrossRef ]
- پان، بی. ژائو، ی. گوا، ایکس. چن، ایکس. چن، دبلیو. پنگ، کیو. تجسم با انگیزه ادراک برای صحنه های شهر سه بعدی. Vis. محاسبه کنید. 2013 ، 29 ، 277-286. [ Google Scholar ] [ CrossRef ]
- تراپ، ام. گلندر، تی. بوکهلز، اچ. لنزهای تعمیم سه بعدی Dolner, J. برای فوکوس تعاملی + تجسم بافت مدل های شهر مجازی. در مجموعه مقالات دوازدهمین کنفرانس بین المللی تجسم اطلاعات (IV ’08)، لندن، انگلستان، 9 تا 11 ژوئیه 2008; صص 356-361.
- گلندر، تی. Döllner, J. نمایش های انتزاعی برای تجسم تعاملی مدل های شهر سه بعدی مجازی. محاسبه کنید. محیط زیست سیستم شهری 2009 ، 33 ، 375-387. [ Google Scholar ] [ CrossRef ]
- مدلهای هندسی سلسله مراتبی کلارک، JH برای الگوریتمهای سطح مرئی. اشتراک. ACM 1976 ، 19 ، 547-554. [ Google Scholar ] [ CrossRef ]
- Regnauld، N. نوع سازی ساختمان متنی در تعمیم خودکار نقشه. الگوریتمیکا 2001 ، 30 ، 312-333. [ Google Scholar ] [ CrossRef ]
- لی، ز. یان، اچ. آی، تی. چن، جی. تعمیم خودکار ساختمان بر اساس مورفولوژی شهری و نظریه گشتالت. بین المللی جی. جئوگر. Inf. علمی 2004 ، 18 ، 513-534. [ Google Scholar ] [ CrossRef ]
- چانگ، آر. وسل، جی. کوسارا، ر. سعودا، ای. ریبارسکی، W. شهرهای خوانا: تجسم چند وضوحی وابسته به تمرکز روابط شهری. IEEE Trans. Vis. محاسبه کنید. نمودار. 2007 ، 13 ، 1169-1175. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یانگ، ال. ژانگ، ال. ما، جی. زی، جی. لیو، ال. تجسم تعاملی مدلهای ساختمان شهری با وضوح چندگانه با در نظر گرفتن شناخت فضایی. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 5-24. [ Google Scholar ] [ CrossRef ]
- Sester, M. تعمیم بر اساس تعدیل حداقل مربعات. در آرشیو بین المللی فتوگرامتری و سنجش از دور ; ISPRS: آمستردام، هلند، 2000. [ Google Scholar ]
- Allouche, MK; Moulin، B. آمیختگی در تعمیم نقشهبرداری با استفاده از شبکههای ویژگی کهونن. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 899-914. [ Google Scholar ] [ CrossRef ]
- Sester, M. رویکردهای بهینه سازی برای تعمیم و انتزاع داده ها. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 871-897. [ Google Scholar ] [ CrossRef ]
- کادا، م. Luo, F. تعمیم پلان زمین ساختمان با استفاده از نیم فضا. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2006 ، 36 ، 1-4. [ Google Scholar ]
- هاونرت، جی.-اچ. Wolff, A. ساده سازی بهینه نقشه های زمینی ساختمان. در مجموعه مقالات بیست و یکمین کنگره ISPRS پکن، پکن، چین، 3 تا 11 ژوئیه 2008. صص 372-378.
- فن، اچ. منگ، ال. Jahnke، M. تعمیم ساختمان های سه بعدی مدل سازی شده توسط citygml. در پیشرفت های علم ; Springer: برلین، آلمان، 2009; صص 387-405. [ Google Scholar ]
- فن، اچ. Meng, L. یک رویکرد سه مرحلهای برای سادهسازی ساختمانهای سه بعدی مدلسازی شده توسط citygml. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1091-1107. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. زو، س. دو، ز. فنگ، تی. ژانگ، ی. تعمیم مبتنی بر مورفولوژی ریاضی مدلهای ساختمان پیچیده سه بعدی که روابط معنایی را در بر میگیرد. ISPRS J. Photogramm. Remote Sens. 2012 ، 68 ، 95-111. [ Google Scholar ] [ CrossRef ]
- فوربرگ، الف. تعمیم داده های ساختمان سه بعدی بر اساس رویکرد مقیاس-فضا. ISPRS J. Photogramm. Remote Sens. 2007 ، 62 ، 104-111. [ Google Scholar ] [ CrossRef ]
- گرابلر، اف. آگراوالا، م. سامنر، RW; Pauly, M. تولید خودکار نقشه های توریستی. ACM Trans. نمودار. 2008 ، 27 ، 100:101–100:111. [ Google Scholar ] [ CrossRef ]
- دو، ز. زو، س. ژائو، جی. روششناسی سادهسازی مبتنی بر ادراک مدلهای ساختمان پیچیده سه بعدی. در مجموعه مقالات کنگره XXI ISPRS، پکن، چین، 3 تا 11 ژوئیه 2008.
- زو، س. ژائو، جی. دو، ز. لیو، ایکس. ژانگ، ی. روش مکان یابی اولیه هندسی هدایت شده ادراکی برای ساده سازی ساختمان های پیچیده سه بعدی. در مجموعه مقالات گروه کاری ISPRS III/4, IV/8, IV/5 ‘GeoWeb 2009 Academic Track—Cityscapes’, Vancouver, BC, Canada, 27-31 ژوئیه 2009.
- جیانگ، اس. یانگ، بی. Sun، X. نمایش چند رزولوشن مدلهای ساختمان پیچیده سه بعدی با حفظ ویژگیها. در مجموعه مقالات نوزدهمین کنفرانس بین المللی ژئوانفورماتیک 2011، شانگهای، چین، 24 تا 26 ژوئن 2011.
- سان، ایکس. یانگ، بی. آتن، م. لی، کیو. جیانگ، اس. انتزاع خودکار مدلهای ساختمان برای ناوبری سه بعدی در دستگاههای تلفن همراه. در مجموعه مقالات نوزدهمین کنفرانس بین المللی ژئوانفورماتیک 2011، شانگهای، چین، 24 تا 26 ژوئن 2011. صص 1-6.
- لی، کیو. سان، ایکس. یانگ، بی. جیانگ، اس. ساده سازی ساختار هندسی مدل های ساختمان سه بعدی. ISPRS J. Photogramm. Remote Sens. 2013 ، 84 ، 100-113. [ Google Scholar ] [ CrossRef ]
- Kada, M. تعمیم مدل های ساختمان سه بعدی برای ارائه های شبیه به نقشه. در مجموعه مقالات آرشیو بین المللی فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی: XXXVII [S. l.]، پکن، چین، 3–11 ژوئیه 2008. صص 399-404.
- Harper, J. Mastering Autodesk 3ds Max 2013 ; جان وایلی و پسران: ایندیاناپولیس، IN، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- انبار سه بعدی در دسترس آنلاین: https://3dwarehouse.sketchup.com/index.html (در 14 ژوئیه 2016 قابل دسترسی است).
- مرکز نوآوری بازی چند پلتفرمی. در دسترس آنلاین: http://magic.ntu.edu.sg/innovation/infraservices/singapore-3d-models (در 14 ژوئیه 2016 قابل دسترسی است).
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های شهر سه بعدی: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2842-2889. [ Google Scholar ] [ CrossRef ]
- اور، ام. آگوجارو، جی. بیلن، ن. لوس، ال. Zipf، A. تجسم مبتنی بر وب و پرس و جو از مدل های سه بعدی چند رزولوشن تقسیم بندی شده معنایی در زمینه میراث فرهنگی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، 2 ، 33. [ Google Scholar ] [ CrossRef ]
- اوزنیر، U. آنتون، اف. صحیبه، ع. رحمان، ع. Mioc, D. بهبود جستجوی سه بعدی فضایی: تکنیک جدید منحنی پر کردن فضا در مدل سازی سه بعدی شهر. در مجموعه مقالات هشتمین کنفرانس 3D Geoinfo و کارگاه ISPRS WG II/2، استانبول، ترکیه، 27-29 نوامبر 2013.
- اوهوری، کالیفرنیا؛ لدوکس، اچ. بیلجکی، اف. استوتر، جی. مدلسازی یک مدل شهر سه بعدی و سطوح جزئیات آن به عنوان یک مدل 4 بعدی واقعی. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 1055-1075. [ Google Scholar ] [ CrossRef ]
- استال، سی. تاک، اف. دی مایر، پ. دی وولف، ا. گوسنز، R. فتوگرامتری هوابرد و لیدار برای استخراج dsm و تشخیص تغییر سه بعدی در یک منطقه شهری – مطالعه مقایسه ای. بین المللی J. Remote Sens. 2013 ، 34 ، 1087-1110. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یین، ال. Shiode، N. مدل سازی فضایی-زمانی سه بعدی محیط های شهری برای پشتیبانی از فرآیندهای طراحی و برنامه ریزی. J. Urban. بین المللی Res. مکان سازی پایدار شهری. 2014 ، 7 ، 152-169. [ Google Scholar ] [ CrossRef ]
- رسچ، بی. هیلن، اف. ریمر، ا. Spitzer، W. Towards 4D Cartography—نقشه های پویا چهار بعدی برای درک همبستگی های مکانی-زمانی در رویدادهای رعد و برق. کارتوگر. J. 2013 ، 50 ، 266-275. [ Google Scholar ] [ CrossRef ]
- چاتورودی، ک. Kolbe، TH Dynamizers: مدلسازی و پیادهسازی ویژگیهای پویا برای مدلهای شهری سه بعدی معنایی. در مجموعه مقالات کارگاه Eurographics در مورد مدلسازی و تجسم داده های شهری، دلفت، هلند، 23 نوامبر 2015.
- پرینو، سی. گی، جی. Gesquière, G. کاوش در ساختار در حال تغییر شهرها: چالشهایی برای مدلهای شهری زمانی. در مجموعه مقالات میراث دیجیتال 2015، گرانادا، اسپانیا، 28 سپتامبر تا 2 اکتبر 2015. صص 73-76.
- راینهارت، سی اف. داویلا، سی سی مدل سازی انرژی ساختمان شهری – مروری بر یک میدان نوپا. ساختن. محیط زیست 2016 ، 97 ، 196-202. [ Google Scholar ] [ CrossRef ]
- هوفیرکا، جی. Zlocha, M. مدل تابش خورشیدی سه بعدی جدید برای مدل های شهر سه بعدی. ترانس. GIS 2012 ، 16 ، 681-690. [ Google Scholar ] [ CrossRef ]
- برمر، ام. مایر، ا. ویچمن، وی. اشمیتنر، ک. روتزینگر، ام. رویکرد 3 بعدی-gis چند مقیاسی جدید برای ارزیابی و انتشار درآمد خورشیدی مدلهای شهر دیجیتال. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 57 ، 144-154. [ Google Scholar ] [ CrossRef ]
- نوول، آر. زیرک، م. دستگیری، ح. کورز، وی. ایکر، تحلیل انرژی شهری U. بر اساس مدل شهر سه بعدی برای کاربردهای مقیاس ملی. در مجموعه مقالات کنفرانس IBPSA آلمان، آخن، آلمان، 22 تا 24 سپتامبر 2014.
- لیو، اس. فن، X. ون، کیو. لیانگ، دبلیو. Wu, Y. اثرات شبیهسازی شده مورفولوژی شهری سه بعدی بر حمل و نقل شهری در کلان شهرها: مطالعه موردی در پکن. بین المللی جی دیجیت. زمین 2014 ، 7 ، 470-491. [ Google Scholar ] [ CrossRef ]
- Aliaga، DG; وانگاس، سی. لی، م. Niyogi، D. ابزار تصمیم گیری مبتنی بر تجسم برای مدل سازی هواشناسی شهری. محیط زیست طرح. B طرح. دس 2013 ، 40 ، 271-288. [ Google Scholar ] [ CrossRef ]
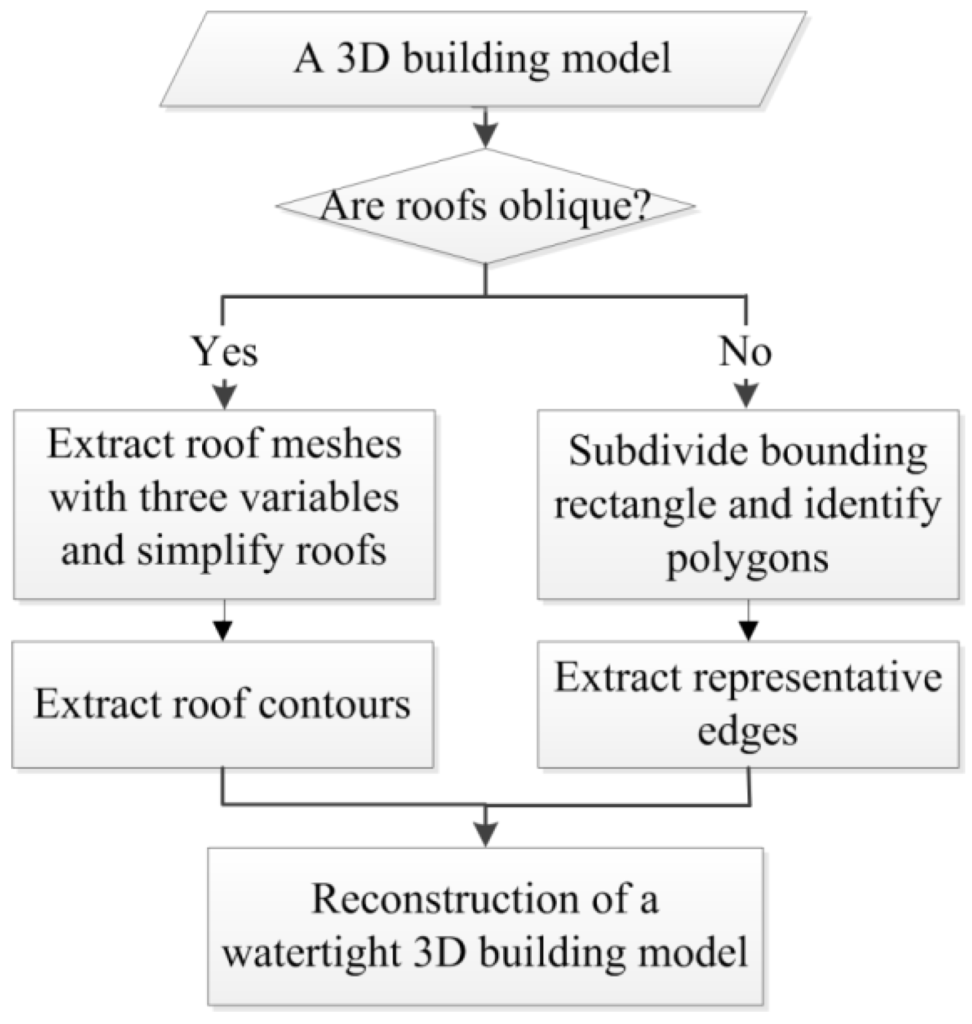
شکل 1. نمودار جریان رویکرد ساده سازی یکپارچه برای ساختمان های سه بعدی.

شکل 2. روش ساده سازی یک ساختمان سه بعدی با چهار سقف شیبدار: ( الف ) ساختمان سه بعدی اصلی. ( ب ) سقف های ساده شده. ( ج ) خطوط سقف استخراج شده؛ و ( د ) ساختمان سه بعدی ضد آب بازسازی شده.
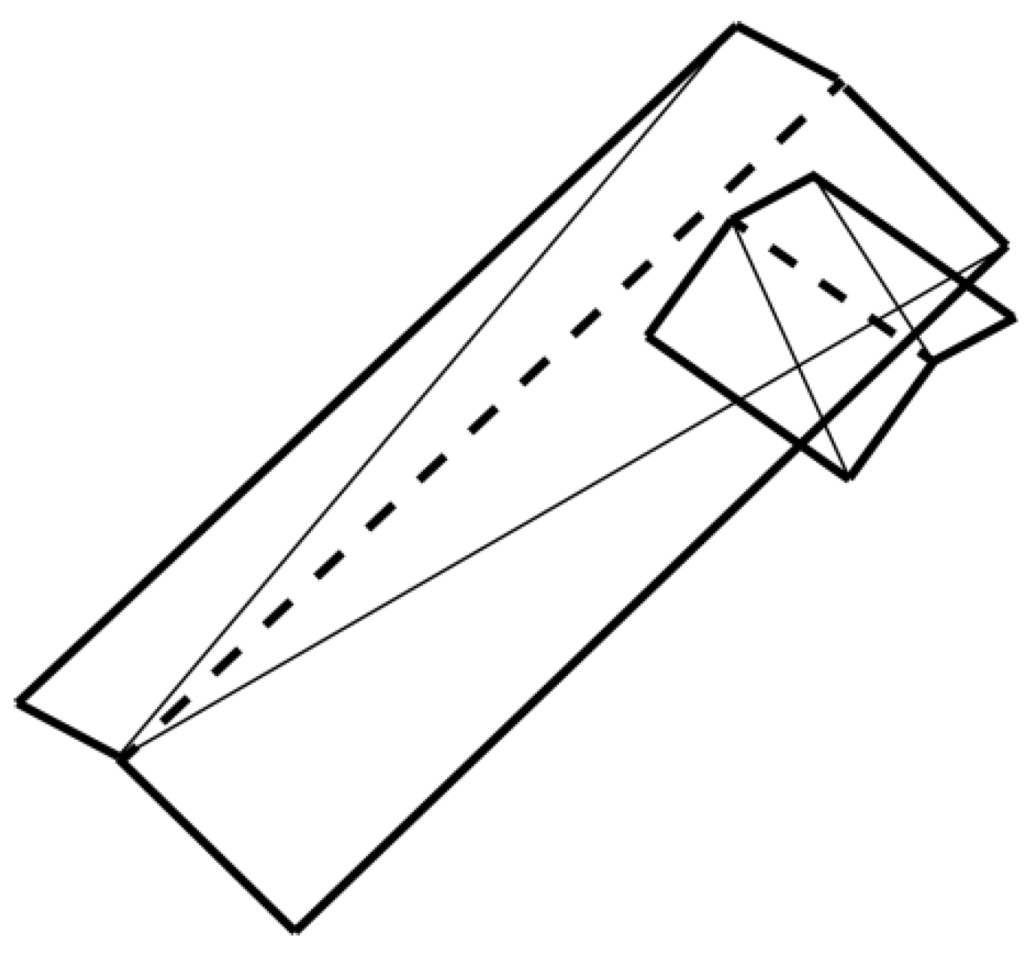
شکل 3. نمونه ای از مش های مثلثی یک ساختمان سه بعدی.

شکل 4. روش ساده سازی ساختمان های سه بعدی با سقف های مسطح: ( الف ) ساختمان سه بعدی اصلی. ( ب ) چند ضلعی های شناسایی شده در داخل ساختمان سه بعدی. ( ج ) لبه های نماینده استخراج شده از چند ضلعی ها. و ( د ) ساختمان سه بعدی ضد آب بازسازی شده.
شکل 5. استخراج لبه های معرف از یک ساختمان سه بعدی با یک ارتفاع سقف: ( الف ) ساختمان سه بعدی اصلی. ( ب ) لبههای استخراجشده (لبههای نشاندهنده: خطوط توپر؛ لبههای معمولی: خطوط چیندار). ( ج ) لبه های نماینده؛ و ( د ) ساختمان سه بعدی ضد آب بازسازی شده.
شکل 6. استخراج لبه های معرف از یک ساختمان سه بعدی که دارای چندین ارتفاع سقف است: ( الف ) ساختمان سه بعدی اصلی. ( ب ) لبه های استخراج شده (لبه های نشان دهنده: خطوط منظم ثابت و خطوط نازک جامد؛ لبه های معمولی: خطوط چین). ( ج ) لبه های نماینده؛ و ( د ) ساختمان سه بعدی ضد آب بازسازی شده.
شکل 7. ساده سازی ساختمان سه بعدی با سقف های شیبدار: ( الف ) مدل اصلی در نمای خیابان. ( ب ) مدل ساده شده در نمای خیابان. ( ج ) مدل اصلی در نمای بالا به پایین. و ( د ) مدل ساده شده در نمای بالا به پایین.
شکل 8. ساده سازی یک ساختمان سه بعدی با سقف های شیبدار: ( الف ) مدل اصلی در نمای خیابان. ( ب ) مدل ساده شده در نمای خیابان. ( ج ) مدل اصلی در نمای بالا به پایین. و ( د ) مدل ساده شده در نمای بالا به پایین.

شکل 9. ساده سازی یک ساختمان سه بعدی با سقف های مسطح: ( الف ) مدل اصلی در نمای خیابان. ( ب ) مدل ساده شده در نمای خیابان. ( ج ) مدل اصلی در نمای بالا به پایین. و ( د ) مدل ساده شده در نمای بالا به پایین.

شکل 10. ساده سازی یک ساختمان سه بعدی با سقف های مسطح: ( الف ) مدل اصلی در نمای خیابان. ( ب ) مدل ساده شده در نمای خیابان. ( ج ) مدل اصلی در نمای بالا به پایین. و ( د ) مدل ساده شده در نمای بالا به پایین.
شکل 11. ساده سازی چند مقیاسی Cityscape مثال 1.

شکل 12. ساده سازی چند مقیاسی Cityscape مثال 2.

جدول 1. مقایسه حجم داده ها برای ساختمان سه بعدی اصلی و ساده شده در LOD3.
جدول 2. کاهش حجم داده ها برای ساده سازی چند مقیاسی منظر شهری.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر