1. معرفی
جادهها و ویژگیهای وابسته به آنها، اشیاء ساخت بشر مهمی هستند که با زندگی روزمره انسان مرتبط هستند. از زمان استفاده از تصاویر سنجش از دور، استخراج جاده ها بر اساس تصاویر سنجش از دور برای دهه ها مورد تحقیق قرار گرفته است. رویکردهای موفق برای استخراج جاده ها بر اساس طبقه بندی طیفی- فضایی [ 1 ] و روش های تجزیه و تحلیل تصویر مبتنی بر دانش [ 2 ]، در میان دیگران بوده است. با افزایش وضوح تصاویر سنجش از راه دور، می توان به طور دقیق ویژگی های دقیق جاده های وابسته، مانند گذرگاه های گورخر را استخراج کرد. گذرگاه های گورخر، نوعی گذرگاه عابر پیاده، در بسیاری از نقاط جهان مورد استفاده قرار می گیرد، که اطلاعات بسیار مهمی است که اغلب در جمع آوری داده های جغرافیایی نادیده گرفته می شود [ 3]]. اخیراً، با افزایش تقاضا برای اطلاعات دقیق جاده که توسط تجزیه و تحلیل دسترسی محلی، شبیهسازی و پیشبینی عابر پیاده، و ناوبری خودروهای بدون راننده تحریک میشود، استخراج گذرگاههای گورخر بهویژه برای اهداف بازسازی، به یک موضوع تحقیقاتی مهم تبدیل شده است [ 4 ، 5 ، 6 ، 7 ]. تصاویر هوایی با وضوح بالا یکی از مهمترین و محبوبترین منابع داده برای بازیابی دادههای جغرافیایی هستند [ 8 ، 9 ، 10 ، 11 ، 12 ]، و امکانات بیشتری را برای استخراج و بازسازی گذرگاههای گورخر فراهم میکنند.
استخراج گذرگاههای گورخر به نمونههای شی طبقهبندی شده از تصاویر هوایی اولین و حیاتیترین گام برای پردازش و بازسازی بیشتر دادهها است. تصاویر هوایی عمدتاً برای شناسایی گذرگاههای گورخری از ناحیه نسبتاً بزرگتر به منظور افزایش اطلاعات مکانی سیستمهای GIS استفاده میشوند. در این مطالعات، از نظم عبور گورخرها برای بهبود میزان تشخیص آنها استفاده شده است. در اوایل دهه 2000، Chunsun Zhang [ 13 ] بر روی استخراج جاده ها و همچنین بر روی استخراج از تقاطع گورخر بر اساس تقسیم بندی اطلاعات رنگ و بسته شدن مورفولوژیکی برای نشانه هایی از وجود جاده ها کار کرد. تورنیر و پاپرودیتیس [ 14] یک رویکرد خودکار برای تشخیص خطوط چین بر اساس تحلیل تصادفی پیشنهاد کرد. هسته اصلی این رویکرد ایجاد مدل های هندسی، رادیومتری و رابطه ای برای اجسام خط چین است. علاوه بر این، جین و همکاران. [ 15 ، 16 ] خطکشیهای جادهها و گذرگاههای گورخر را بر اساس تحلیلهای تصویر سلسله مراتبی و فیلترهای گابور دو بعدی [ 17 ] از نظر ویژگیهای بافت از تصاویر هوایی با وضوح بالا استخراج کردند و نتایج متوسطی را که توسط سایهها تأثیر میگذاشتند، به دست آوردند.
فراتر از نیازهای استخراج گذرگاه گورخر، بازسازی گذرگاه های گورخری با دقت هندسی بالا نیز در بسیاری از کاربردهای عملی مانند شبیه سازی ترافیک، مدیریت، نگهداری و به روز رسانی پایگاه داده های نقشه برداری جاده ها ضروری است [18 ، 19 ] . بهمن و همکاران [ 19 ] یک رویکرد خودکار برای بازسازی تقاطع گورخر با استفاده از جفت های استریو با محدودیت های هندسی شکل و اندازه شناخته شده ارائه کرد. تورنیر و پاپرودیتیس [ 20] همچنین روشی را برای بازسازی مدل های تقاطع اولیه گورخر از تصاویر موبایل کالیبره شده با استفاده از تشخیص لبه، زنجیره لبه، تطبیق لبه و فرآیند پالایش برای بهینه سازی مدل های نهایی معرفی کرد. در همین حال، برای ویژگیهای اجسام ثابت، گذرگاههای گورخر به عنوان اشیاء کنترل زمینی برای ارائه ارجاع جغرافیایی برای سیستمهای نقشهبرداری متحرک پس از بازسازی دقیق از تصاویر هوایی استفاده میشوند [21 ] .
در تصاویر هوایی با وضوح بالا، گذرگاه های گورخر دارای سه ویژگی اصلی زیر هستند: طیف، بافت و شکل. برای اولین ویژگی، گذرگاه های گورخر تضاد شدید با پس زمینه است. برای مشخصه دوم، گذرگاه های گورخر دارای همبستگی تناوبی قوی است و تاپل های ساده همیشه در یک راستا قرار دارند. برای آخرین مشخصه، تاپل گذرگاه های گورخر همیشه یک مستطیل یا متوازی الاضلاع همگن است. در عمل، تصاویر گذرگاههای گورخر اغلب به دلیل پوشش خودروها یا عابران پیاده و سایهها بدتر میشوند، که بر ویژگیهای طیف و بافت تأثیر میگذارد. از آنجایی که مشخصه بافت نسبت به شرایط روشنایی و قسمت های مبهم حساس نیست، مشخصه شکل در تغییرات نمونه نسبتاً پایدار عمل می کند. از این رو، در این مقاله،
الگوریتم یک استخراج از گذرگاه های گورخر را انجام می دهد و سپس آنها را بازسازی می کند. برای مرحله استخراج، طبقهبندیکننده JointBoost [ 22 ] بر اساس الگوهای بافت آنها که توسط ماتریس هموقوع سطح خاکستری (GLCM) [ 23 ، 24 ] و مجموعهای از فیلترهای گابور دو بعدی [ 25] توصیف شده است، استفاده میشود.]. GLCM یکی از توصیفگرهای ویژگی بافت در حوزه فضا است که ساده و موثر است. گذرگاههای گورخر دارای ویژگیهای تکراری هستند که پاسخهای قوی در حوزه فرکانس مجموعهای از فیلترهای گابور دارند. برای مرحله بازسازی، ما یک مدل هندسی پارامتری را برای توصیف سراسری شکل گذرگاههای گورخر پیشنهاد میکنیم. در فرآیند برازش مدل، ما تکرارپذیری فضایی گذرگاههای گورخر را در نظر میگیریم تا خطاهای موضعی ناشی از شرایط ذکر شده قبلی را بازبینی کنیم.
این مقاله به شرح زیر سازماندهی شده است: در بخش 2 ، روش شناسایی و بازسازی گذرگاه های گورخر را شرح می دهیم. روش تشخیص شامل دو جزء زیر است: تعریف ویژگی و استخراج از تقاطع گورخر. روش بازسازی مدل پارامتری تقاطع گورخر و پردازش برازش را پیشنهاد میکند. بخش 3 با چندین آزمایش برخی از تصاویر گذرگاه گورخر را که توسط عابران پیاده، سایه ها و اتوبوس ها پنهان شده است، تأیید می کند. در بخش پایانی، با نظراتی در مورد الگوریتم و تحقیقات آتی نتیجه گیری می کنیم.
2. روش شناسی
2.1. مروری بر روش
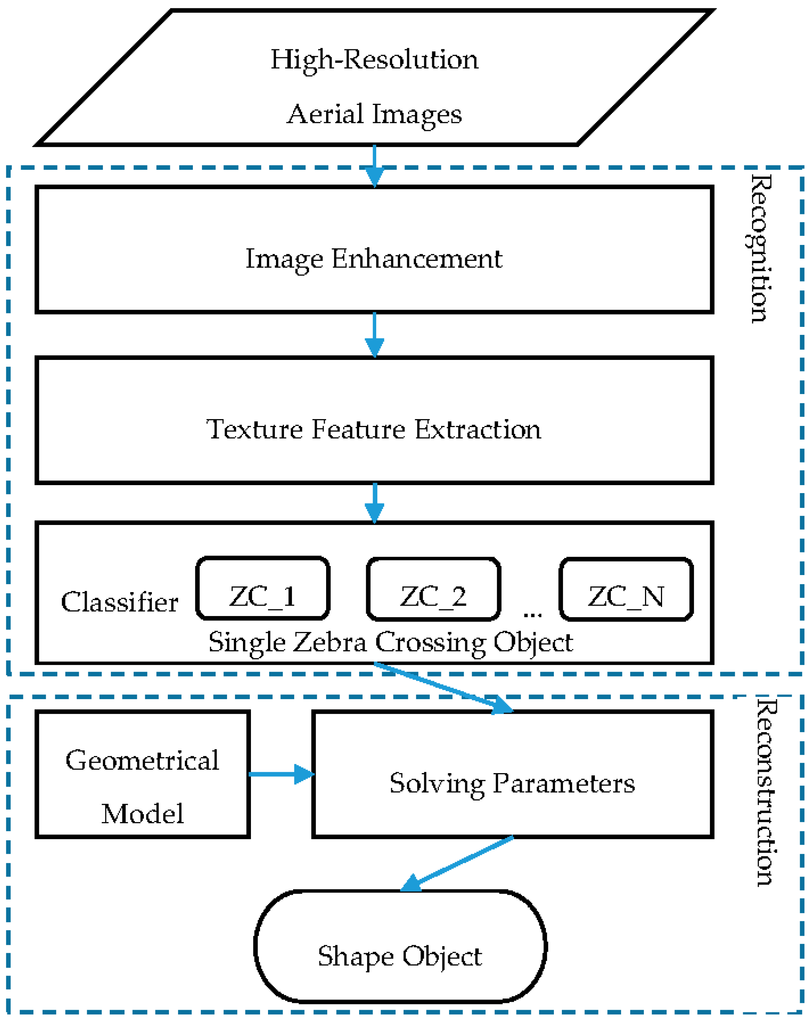
رویکرد اصلی روش ما بر دو مرحله اصلی متمرکز است: شناسایی و بازسازی تقاطع گورخر. هر دو در شکل 1 نشان داده شده اند . در مرحله اول، مراحل استخراج از تقاطع گورخر انجام می شود که شامل بهبود تصاویر با وضوح بالا، تعریف و استخراج ویژگی بافت و یک طبقه بندی برای آموزش و طبقه بندی می شود. در مرحله دوم، برای هر تقاطع گورخر، مدل هندسی با حل مجموعه ای از پارامترهای از پیش تعریف شده با استفاده از یک سری مراحل بازسازی می شود.
2.2. استخراج متقاطع گورخر
این مرحله استخراج به طبقهبندی JointBoost برای تمایز بین گذرگاههای گورخر و پسزمینه آنها متکی است. از آنجایی که طبقه بندی نیمه نظارتی است، ما فقط به ویژگی های GLCM و پاسخ های فیلترهای گابور دو بعدی با تصاویر چند مقیاسی تکیه می کنیم.
قبل از فرآیند استخراج، رویهای برای بهبود تصویر برای بهینهسازی کنتراست برای تشخیص ویژگی و همچنین کاهش اثرات سایهها و نویز سفید در هر تصویر عملی انجام میشود. فیلتر والیس یک تبدیل تصویر محلی است که میانگین خاکستری و واریانس قسمت های مختلف را تقریب می زند [ 26 ]. یعنی کنتراست خاکستری را در قسمت هایی که کنتراست کوچک است افزایش می دهد و در جایی که کنتراست زیاد است کنتراست خاکستری را کاهش می دهد. به دلیل عملگر صافی که هنگام محاسبه میانگین و واریانس خاکستری معرفی می شود، فیلتر والیس اطلاعات مفید را افزایش می دهد و همزمان نویز را سرکوب می کند که به صورت زیر بیان می شود.
جایی که g ( x ، y)g(�,�)مقدار DN (شماره دیجیتال) در موقعیت است ( x ، y)(�,�)از تصویر اصلی gg، و f( x ، y)�(�,�)مقدار DN بعد از فیلتر والیس است. r1�1یک ضریب ضربی است و r0�0یک ضریب افزایشی است. مترf��مقدار میانگین محلی است و سf��مقدار واریانسی است که نسخه اصلی با آن تنظیم می شود. مترg��مقدار میانگین محلی است و سg��مقدار واریانس تصویر اصلی است. c ∈ [ 0 , 1 ]�∈[0,1]ثابت کشش کنتراست تصویر است و b ∈ [ 0 , 1 ]�∈[0,1]یک ضریب روشنایی است. در روش تبدیل والیس، تصویر اصلی به بلوک ها تقسیم می شود و جزئیات تصویر از طریق تنظیم کنتراست هر پنجره کوچک، همانطور که در شکل 2 نشان داده شده است، افزایش می یابد .
2.2.1. تعریف ویژگی ها
ویژگی های GLCM
GLCM برخی اطلاعات جامع از بافت تصویر را منعکس می کند که جهت، فاصله و تغییرات مقیاس خاکستری دو پیکسل را در نظر می گیرد. بنابراین اندازه ابعاد آن با مقدار سطح خاکستری متناسب است. با در نظر گرفتن تعادل بین کارایی محاسباتی و دقت، تعداد کافی از سطوح خاکستری باید برای آمار GLCM انتخاب شود. معمولاً 256 سطح خاکستری در یک تصویر فشرده می شوند تا در زمان محاسبه GLCM صرفه جویی شود [ 27 ]. از آنجا که GLCM نمی تواند مستقیماً به عنوان ویژگی ورودی طبقه بندی کننده استفاده شود، ما پنج معیار انتخاب را از GLCM برای الگوریتم خود استخراج می کنیم.
- (1)
-
لحظه دوم زاویه ای:
جایی که L�نشان دهنده تعداد سطوح خاکستری متمایز در تصاویر و p ( i , j )�(�,�)ورودی ( i , j ) در GLCM است . این آمار یکنواختی نیز نامیده می شود که یکنواختی و نابسامانی بافت را اندازه گیری می کند.
- (2)
-
همبستگی:
جایی که توایکس��، توy��، σایکس��و σy�yمیانگین و انحراف معیار ردیف ها و ستون های خلاصه شده است. ویژگی همبستگی وابستگی های خطی رنگ خاکستری را در تصویر اندازه گیری می کند.
- (3)
-
این آمار کنتراست شدت یا تغییرات محلی بین یک پیکسل و همسایه اش را در کل تصویر اندازه گیری می کند.
- (4)
-
به همگنی لحظه اختلاف معکوس (IDM) نیز گفته می شود که همگنی تصویر را اندازه گیری می کند. ارزش اچای ام���برای تصاویر ناهمگن کم است و برای تصاویر همگن ارزش نسبتاً بالاتری دارد.
- (5)
-
این آمار بی نظمی یا پیچیدگی یک تصویر را اندازه گیری می کند. تصاویر ناهمگن آنتروپی مرتبه اول پایینی دارند، در حالی که یک صحنه همگن آنتروپی بالایی دارد.
برای به دست آوردن ویژگیهای تغییرناپذیر چرخش، ما از پارامترهای آماری این پنج معیار، بهجای خود GLCM، به عنوان ویژگیهای استخراج، از جمله میانگین و انحراف استاندارد، استفاده میکنیم. همه این پارامترهای آماری با هم به عنوان ویژگی های نهایی برای استخراج از تقاطع گورخر استفاده می شود. برای سادگی، این پارامترها در اینجا ویژگی های GLCM نامیده می شوند.
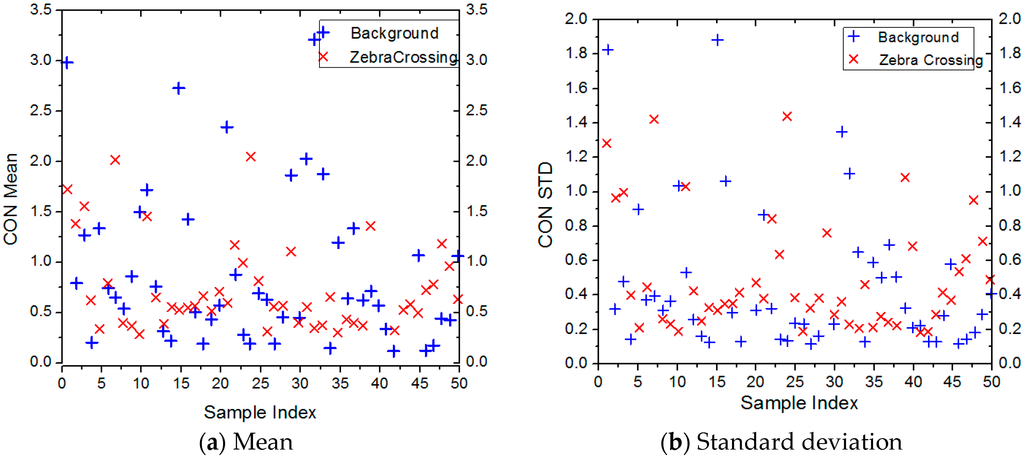
به طور کلی، تصاویر اصلی از چندین حوزه فرکانس های فضایی تشکیل شده اند. همانطور که شکل 3 a,b نشان می دهد، جدا کردن گذرگاه های گورخر از پس زمینه تصاویر اصلی دشوار است. خوشبختانه، در مقایسه با پسزمینه، گذرگاههای گورخر با لبههای ظریف فرکانسهای بالاتری دارند، بنابراین ابتدا یک فیلتر بالا گذر برای تقویت و بهبود کنتراست تصویر قبل از انجام محاسبات GLCM اعمال میشود. علاوه بر این، برای در نظر گرفتن تغییرات مقیاس محلی [ 28 ، 29 ، 30 ]، یک عملگر DoG (تفاوت گوسی ها) [ 31 ] استفاده می شود که در الگوریتم SIFT [ 32 ] پیاده سازی شده است. به عنوان مثال، شکل 4نتیجه اعمال یک اپراتور DoG با STD Gaussian را نشان می دهد σ = 0.5 K ( ک= 1 ، 2 ، 3 ، 4 ، 5 ، 6 )�=0.5� (�=1, 2, 3, 4, 5, 6)و الف 5 × 55×5هسته
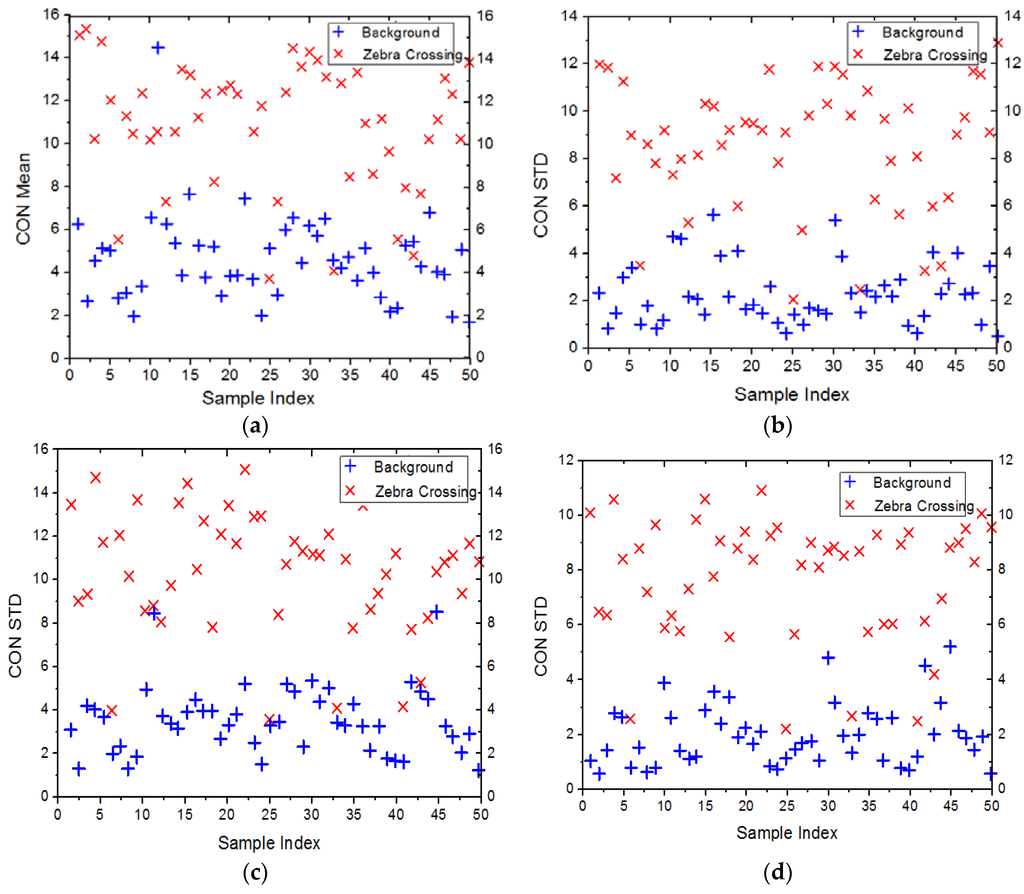
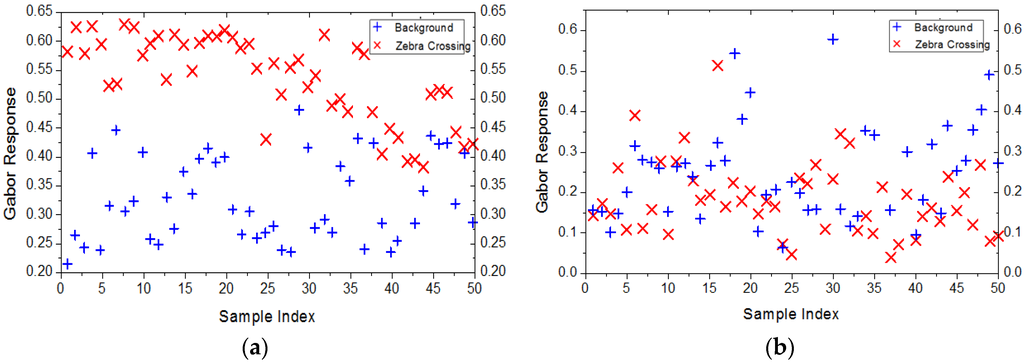
برای آزمایش حساسیت ویژگیهای GLCM در مقیاسهای مختلف برای تشخیص گذرگاهها و پسزمینه گورخر، آزمایشی با استفاده از 50 نمونه تصویر متقاطع گورخر و 50 نمونه تصویر پسزمینه انجام شد. به عنوان مثال، شکل 5 میانگین و انحراف معیار ویژگی های کنتراست را در تصویر اصلی و تصویر فیلتر شده DoG را در دو مقیاس نشان می دهد. همانطور که می بینیم، جداسازی ویژگی های تقاطع گورخرها و نمونه های پس زمینه به طور قابل توجهی با نتایج فیلتر شده DoG در مقایسه با تصویر اصلی، که در شکل 3 نشان داده شده است، برتر است .
ویژگی 2 بعدی گابور
فیلتر گابور یک فیلتر خطی است که برای تشخیص لبه استفاده می شود [ 33 ]. فیلتر 2 بعدی گابور ویژگی های فیلتر اصلی گابور را به دو بعد گسترش می دهد و قادر است تصاویر فرکانس ها، جهت ها و محدوده های فضایی مختلف را تجزیه و تحلیل کند. فیلتر 2 بعدی گابور در توصیف بافت های تصویر با الگوهای تکراری به خوبی عمل می کند [ 34 ]. فرمول زیر شرح عملکرد هسته آن است:
جایی که λ�طول موج است، θ�زاویه جهت است، ψ�فاز است، σ�واریانس در جهت اصلی تابع گاوسی دوبعدی است و γ�نسبت بین دو واریانس تابع گاوسی دو بعدی است.
شکل 6 نتایج اعمال فیلتر گابور را با فرکانس های مختلف بر روی نمونه تصویر تقاطع گورخر نشان می دهد. به وضوح می توان مشاهده کرد که با استفاده از یک فیلتر فرکانس پایین، تصویر به طور کلی بهبود می یابد، در حالی که اعمال فیلتر فرکانس بالا اطلاعات دقیق را افزایش می دهد.
از آنجایی که فرکانس مکانی و جهت گذرگاه های گورخر در تصاویر دلخواه است، سه باند فرکانسی فضایی و چهار جهت مختلف بر اساس دانش قبلی برای پوشش فرکانس مکانی و جهت گذرگاه های گورخر در نظر گرفته شده است. هنگامی که فرکانس فیلتر با فرکانس فضایی عبور گورخر مطابقت داشته باشد، بزرگی پاسخ بزرگ خواهد بود. میانگین و انحراف استاندارد انرژی پاسخ در هر جهت در هر فرکانس مکانی را به عنوان ویژگی بافت در نظر می گیریم. شکل 7سهم ویژگی استخراج شده توسط دو گروه از فیلترهای گابور را بر روی 50 بلوک عبور گورخر و 50 بلوک پسزمینه نشان میدهد و فرکانس مکانی تقاطعهای گورخر نزدیک به 0.1 است. واضح است که تفکیک ویژگی های استخراج شده توسط فیلترها با فرکانس 0.1 بسیار بهتر از سایرین است.
2.2.2. استخراج گذرگاه های گورخر
اصل JointBoost
JointBoost یک توسعه مهم برای الگوریتم های تقویت است که برای طبقه بندی چند کلاسه قدرتمند و موثر است [ 35 ، 36]. ایده اصلی JointBoost ساختن یک طبقهبندیکننده قوی از میان یک سری طبقهبندیکنندههای ضعیف بر اساس این تصور است که پیدا کردن طبقهبندیکنندههای ضعیف بسیار آسانتر از یافتن مستقیم یک طبقهبندیکننده قوی است. در طول مراحل آموزش، دو ویژگی قابل توجه وجود دارد که به طور قابل توجهی به عملکرد JointBoost کمک می کند. یکی این است که JointBoost بهترین ویژگی ها را برای طبقه بندی کننده های ضعیف در هر مرحله تکرار انتخاب می کند تا از حداقل خطاها اطمینان حاصل کند. این تضمین می کند که JointBoost مناسب ترین ویژگی ها را برای طبقه بندی نهایی انتخاب می کند. مورد دیگر این است که JointBoost می تواند وزن نمونه هایی را که با طبقه بندی مرحله تکرار قبلی مطابقت ندارند، افزایش دهد، بنابراین محاسبات آموزشی در این مرحله می تواند به آن نمونه ها اهمیت بیشتری بدهد. این باعث می شود روند آموزش موثرتر باشد.
2.3. بازسازی گذرگاه گورخر
2.3.1. مدل هندسی
هدف از بازسازی تقاطع گورخر، یافتن یک سری چهارگوش است که دقیقاً با لبه های راه راه های عبور گورخر مطابقت دارند. شکل چهارگوش تقاطع گورخر را می توان برای به روز رسانی پایگاه داده GIS و ارائه بهتر نمایش نقطه عطف استفاده کرد. در [ 20 ]، تشخیص لبه و زنجیره لبه برای بازسازی گذرگاه های گورخر معرفی شده است. گاهی اوقات این روش به دلیل پوشاندن لبه های راه راه توسط عابران پیاده یا اتومبیل ها با شکست مواجه می شود. با این حال، گذرگاههای گورخر دارای ویژگی هندسی جهانی تکرارپذیری فضایی در یک منطقه محلی هستند و این اصل میتواند برای بازسازی ویژگیها استفاده شود.
به دست آوردن لبه های راه راه دقیق گذرگاه های گورخر برای به دست آوردن نظم های جهانی بسیار مهم است. از آنجایی که لبه های نوار نشان دهنده موقعیتی است که شیب تصویر به حداکثر محلی می رسد، می توانیم مجموع لبه گرادیان (SGE) را با توصیف انرژی لبه های نوار به صورت زیر تعریف کنیم:
جایی که g( x ، y)�(�,�)مقدار گرادیان در موقعیت است ( x ، y)(�,�)و E�به عنوان مجموعه ای از موقعیت ها در امتداد لبه های یک گذرگاه گورخر تعریف می شود. بازسازی یک تقاطع گورخر اساساً فرآیندی برای بازسازی لبه های مرزی هر نوار برای تولید حداکثر مقدار SGE است. شکل 9 یک مدل هندسی پارامتریک را برای نشان دادن راه راه های تقاطع گورخر تعریف می کند.
- (1)
-
θمتر��: زاویه تقاطع گورخرها نسبت به جهت اصلی آنها عادی است.
- (2)
-
θپ��: زاویه نوارها نسبت به جهت اصلی آنها نرمال است.
- (3)
-
دبلیوپ��: طول نوار.
- (4)
-
دبلیوه��: پهنای نوار.
- (5)
-
T�: فاصله دو راه راه همسایه.
- (6)
-
∪ni=1(xi,yi)∪�=1�(��,��): مجموعه نقاط مرکزی راه راه ها.
از هندسه مشخص است که یک نوار را می توان با چهار خط مرزی جایگزین کرد. با وسط نوار مشخص شده است (xi,yi)(��,��)، تابع هر یک از چهار خط عبارتند از:
برای یک نوار یک نقطه مرکزی ( ایکسمن، yمنایکسمن، �من، نقاط مرزی نوار را می توان به صورت زیر توصیف کرد:
در نهایت، مجموعه نقاط لبه مرزی همه نوارها به صورت زیر خواهد بود:
بنابراین، اگر پارامترها را بدست آوریم θm��، θp��، Wp��، We��، و ∪N1(xi,yi)∪1�(��,��)، ما قادر خواهیم بود مدل هندسی را برای توصیف مجموعه نقاط لبه مرزی E در این مدل ایجاد کنیم. ∪N1(xi,yi)∪1�(��,��)را نمی توان به طور مستقیم به دست آورد، اما هر دو نقطه مرکز مجاور در ∪N1(xi,yi)∪1�(��,��)دارای فواصل یکسان از T�. بدین ترتیب، ∪N1(xi,yi)∪1�(��,��)با محاسبه تقاطع بین خطوط مرکزی هر نوار و خط مرکزی تقاطع گورخر به دست می آیند. خطوط مرکزی هر نوار مطابق با پارامتر ایجاد می شود T�.
2.3.2. پارامترها را حل کنید
یافتن مستقیم مقدار E مناسب برای رسیدن به حداکثر مقدار جهانی تابع SGE دشوار است. در عوض، ابتدا شکل ناهموار اولیه تقاطع گورخر را ایجاد می کنیم، سپس SGE را با یک گرادیان بهینه می کنیم تا یک E دقیق بدست آوریم . قبل از محاسبه مدل اصلی، تصاویر فرعی از تقاطع گورخر شناسایی شده در تصاویر باینری پیش پردازش می شوند. در طول پیش پردازش، یکسان سازی هیستوگرام، حذف سایه و پردازش مورفولوژیکی برای افزایش کیفیت تصویر اعمال می شود، همانطور که در شکل 10 نشان داده شده است .
- مرحله اول:
-
دامنه _
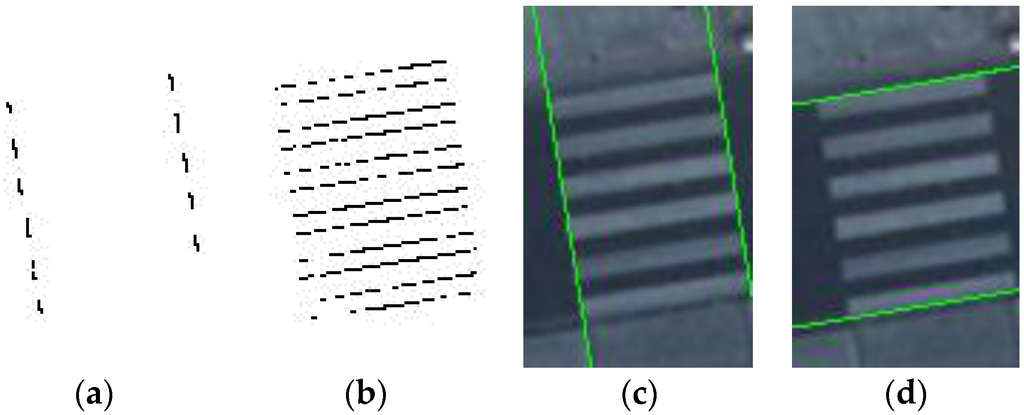
تبدیل Hough (HT) برای استخراج خطوط مرزی نوارهای چهار گوش استفاده می شود. در برخی از تصاویر، لبه های امتداد تقاطع گورخر محو شده است که باعث عدم دقت در نتایج تشخیص خط می شود. برای بهبود دقت تشخیص خط مرزی، این روش را به دو مرحله تقسیم می کنیم. ابتدا از HT برای تشخیص خطوط مرزی برای به دست آوردن نتایج اولیه استفاده می کنیم. سپس، جهت خطوط مرزی را با مقادیر گرادیان پیکسل ها در امتداد خطوط شناسایی شده تنظیم می کنیم. با این روش میتوان لبههای خطهای متقاطع گورخر را پیدا کرد و محدوده تقاطع گورخر و همچنین دو پارامتر زاویه را تخمین زد. θm�mو θp��. شکل 11 نتایج تشخیص خط مرزی عبور از گورخر را نشان می دهد.
- مرحله دوم:
-
دوره تکراری فضایی
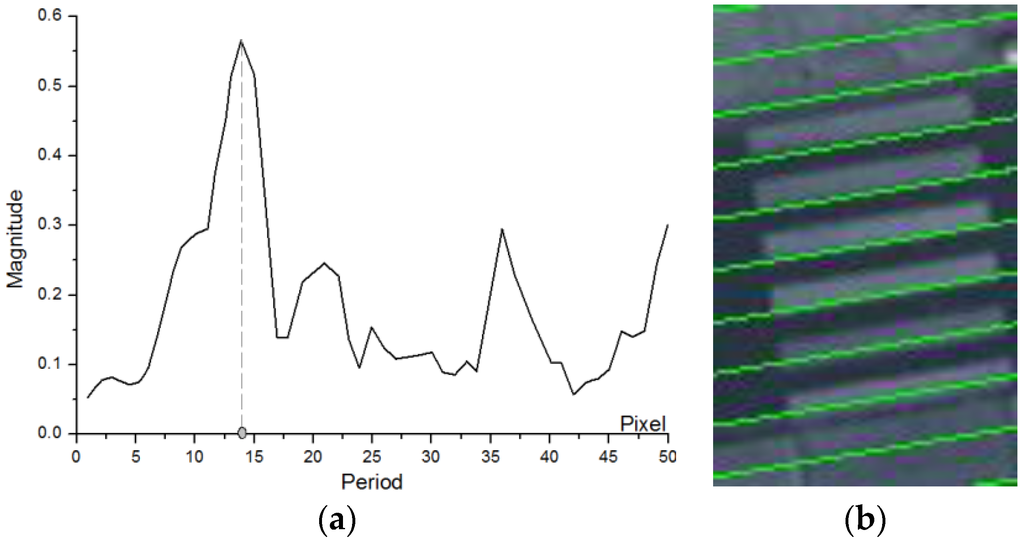
دوره تکراری فضایی، که با T نشان داده می شود، یک پارامتر مهم برای نظم تکراری است. با این حال، فرآیند تشخیص خط شرح داده شده در مرحله I ممکن است همه خطوط را پوشش ندهد، که ممکن است منجر به شکست تخمین تکراری از تحلیل فاصله خط از دیدگاه آمار تصویر شود. تبدیل گابور، که یک مورد خاص از تبدیل فوریه کوتاه مدت است، برای تجزیه و تحلیل سیگنالهای ناپایدار که بر مشکلات فضای مورد نیاز موجود در تبدیل فوریه معمولی (FT) غلبه میکند، خوب است [33 ] . ما می توانیم تصویر را به فضای فرکانس تبدیل کنیم تا T مناسب را پیدا کنیم. شکل 12a مثالی است که توزیع فرکانس را در امتداد جهت اصلی تقاطع گورخر نشان می دهد. فرکانس نسبت به اوج توزیع نشان دهنده بسامد فضایی تقاطع گورخر است که از آن می توانیم دوره مکانی را محاسبه کنیم. شکل 12 ب گروهی از خطوط موازی ایجاد شده توسط این دوره مکانی را نشان می دهد. بدیهی است که نتایج نشان میدهد که تمام خطوط لبههای نوارها را دقیقاً پوشش نمیدهند، که نشان میدهد دوره مکانی استخراجشده توسط فیلتر گابور دقیق نیست. از این رو، این دوره مکانی تنها می تواند به عنوان یک مقدار اولیه استفاده شود که برای بهینه سازی تنظیم می شود.
- مرحله سوم:
-
عرض و مراکز
شیب های لبه های مخالف یک نوار دارای جهت مخالف هستند که در شکل 13 a,b نشان داده شده است. بنابراین، دو گروه از خطوط که لبه های مخالف نوارها را می پوشانند را می توان به صورت زیر تعریف کرد:
جایی که T0�0دوره فضایی به دست آمده در مرحله دوم است، و ρf��، ρb��موقعیت خطوط اول در بین دو گروه از خطوط است. حل پارامترها ρf��و ρb��در محدوده هستند [0,T0)[0,�0). از این رو، پارامترها را می توان با برشمردن پارامترها و آنهایی که حداکثر می دهند به دست آورد. SGE���انتخاب خواهد شد. با این دو گروه از خطوط موازی، عرض نوار را می توان به صورت زیر توصیف کرد:
برای دوره مکانی با تعصب، این عرض نیز یک مقدار تقریبی است. شکل 13 a,b دو گروه از خطوط راه راه را نشان می دهد. علاوه بر این، ∪Ni=1(x,y)∪�=1�(�,�)را می توان با استفاده از دوره مکانی، عرض نوار عبور گورخر و چهار خط مرزی آن محاسبه کرد.
- مرحله چهارم:
-
بهینه سازی جهانی
در این مرحله، ما تمام پارامترهای مورد نیاز برای تولید یک مدل هندسی را داریم. از آنجا که جهت اصلی توسط نتایج استخراج از تقاطع گورخر تعیین می شود، ما فقط باید دوره فضایی T و عرض نوارهای W را بهینه کنیم . تابع SGE را می توان به صورت زیر توصیف کرد:
در بهینهسازی، از روش Gradient Descent [ 37 ] برای بهینهسازی این دو پارامتر استفاده میشود که به SGE اجازه میدهد به حداکثر محلی برسد. از این رو، ما قالب را به مدل دیفرانسیل برای نزول گرادیان، نشان داده شده در معادله (16) تغییر می دهیم.
در مثال زیر، شکل 14 b دو گروه بهینه سازی شده از خطوط را نشان می دهد که لبه های نوارها را با دقت بیشتری نسبت به خطوط قبل از بهینه سازی پوشش می دهند، همانطور که در شکل 14 الف نشان داده شده است.
2.3.3. ناپیوستگی های تعمیر
در برخی موارد، یک گذرگاه گورخر ممکن است به دلیل پوشاندن اشیاء مانند اتومبیل، اتوبوس و عابران پیاده به چندین قسمت جدا شود. اتصال و الگوی تکراری اغلب برای رسیدگی به تعمیر یا ادغام تقاطع گورخر شکسته که با اصول زیر توجیه می شود استفاده می شود: (1) هر قسمت دارای پارامترهای هندسی یکسان یا مشابه است. و (2) نقاط مرکز راه راه بین دو قسمت باید به صورت هم خط باشند. از این اصول، ما می توانیم قوانین معنایی زیر را برای تعمیر و ادغام یک گذرگاه گورخر تعریف کنیم:
-
قانون 1: فاصله دو قسمت عبور گورخر باید کمتر از یک آستانه باشد.
-
قانون 2: هنگام اتصال نقاط مرکزی به یک خط، باقیمانده باید کوچکتر از یک آستانه باشد.
-
قانون 3: هنگام انتخاب دو نقطه مرکزی نوار p�و q�، فاصله بین p�و q�باید مضربی جدایی ناپذیر از دوره تکرار باشد.
برای دو گذرگاه گورخری مجاور، اگر از شرایط ذکر شده در بالا پیروی کنند، می توانیم آنها را در یک گذرگاه گورخر ترکیب کنیم و پارامترهای گذرگاه گورخر جدید را مجدداً محاسبه کنیم.
3. بخش آزمایشات
برای آزمایش روش پیشنهادی، آزمایش از سه مجموعه داده با GSD مختلف استفاده میکند. اولین مجموعه داده های آزمون در پاریس، فرانسه با وضوح تقریباً 0.1 متر جمع آوری شد. مجموعه دوم داده های آزمایشی در داتونگ، چین با وضوح تقریباً 0.05 متر جمع آوری شد. مجموعه سوم داده های آزمون در نیویورک، ایالات متحده، با وضوح تقریباً 0.2 متر جمع آوری شد. آزمایشها شامل دو بخش زیر است: استخراج تقاطع گورخر و بازسازی شکل هندسی.
3.1. استخراج متقاطع گورخر
JointBoost به عنوان طبقه بندی کننده برای استخراج تقاطع گورخر بر اساس ویژگی های بافت GLCM چند مقیاسی و گابور 2 بعدی استفاده می شود. علاوه بر این، ما نتایج روش پیشنهادی را با نتایج یک روش تطبیق الگو مقایسه میکنیم. ما عملکرد الگوریتم را با دو داده آزمایشی با استفاده از طبقهبندیکننده یکسان ارزیابی میکنیم. مجموعه داده های آموزشی شامل 50 نمونه تلاقی گورخر مثبت و 150 نمونه منفی است. ما همچنین از یک نمونه مثبت به عنوان الگو برای تشخیص تقاطع گورخر در روش تطبیق الگو با آستانه های مختلف استفاده می کنیم.
3.1.1. آزمایش I: تشخیص عبور از گورخر
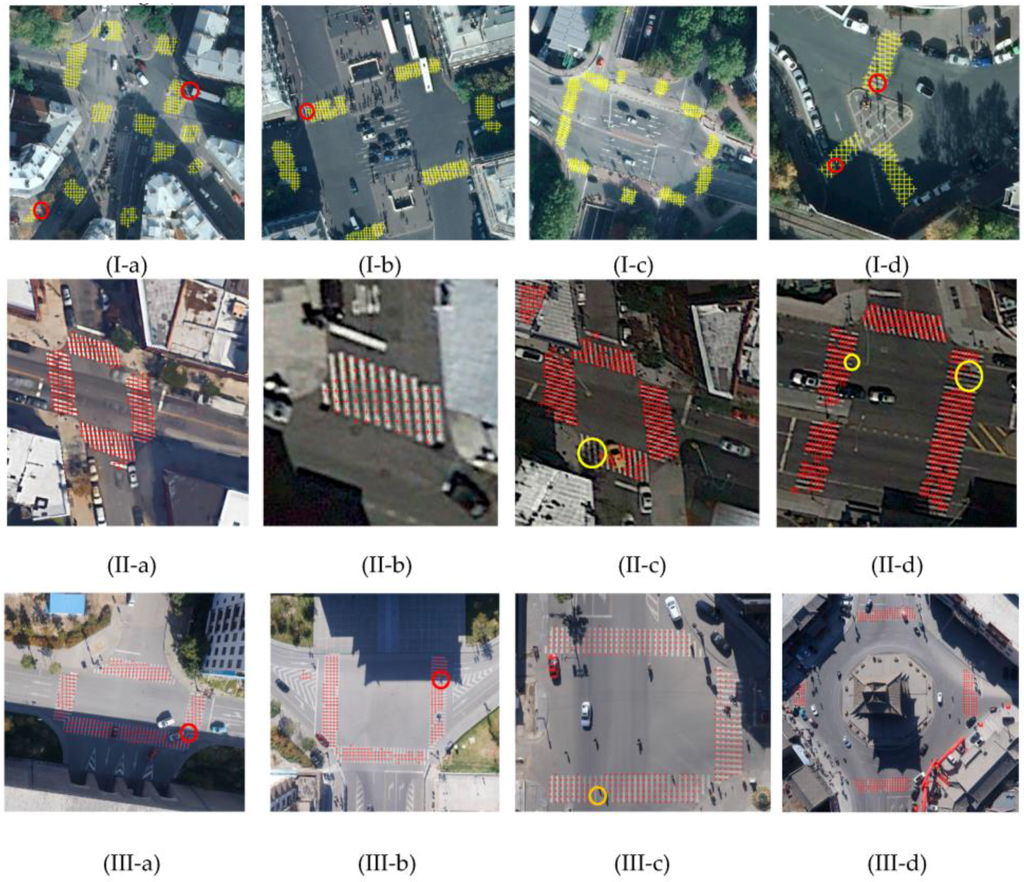
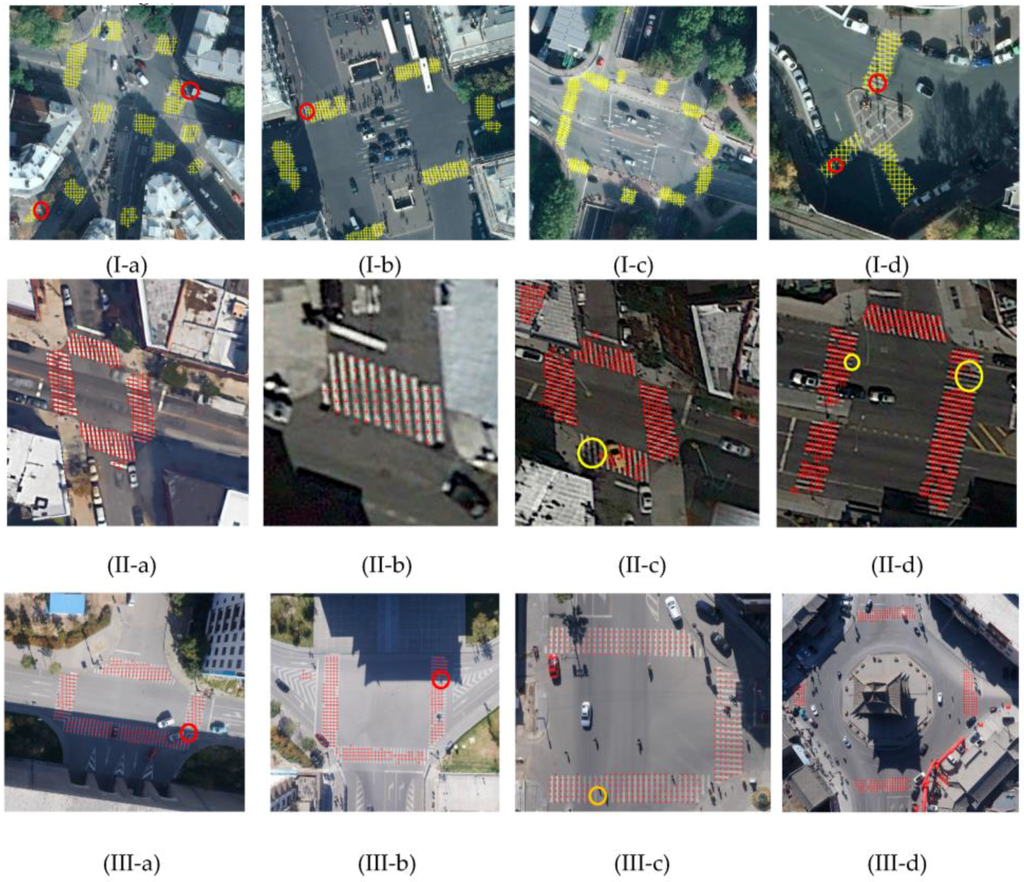
12 تصویر در سه مجموعه داده از تقاطع های گورخر با شرایط مختلف، از جمله ویژگی هایی که گذرگاه های گورخر را پنهان می کند و همچنین تخریب رنگ وجود دارد. شکل 15 نتایج استخراج از تقاطع گورخر توسط JointBoost را نشان می دهد. در شکل 15 ، تمام گذرگاه های گورخر، علیرغم برخی اختلالات درون تصویر مانند تخریب رنگ (در دایره های زرد) و گذرگاه های سایه دار گورخر (در دایره های قرمز) شناسایی شده اند.
از این آزمایشها متوجه میشویم که عملکرد JointBoost خوب است. طبقهبندیکننده JointBoost بر اساس نظریههای تحلیل آماری ساخته شده است که بسیاری از طبقهبندیکنندههای ضعیف را برای تولید یک طبقهبندی قوی ترکیب میکند. هر یک از طبقهبندیکنندههای ضعیف به ویژگی خاصی حساس هستند و از نظر آماری احتمال عبور یا پسزمینه بودن یک نمونه را تعریف میکنند. علاوه بر این، JointBoost توانایی انتخاب تنها ویژگی هایی را دارد که در طول طبقه بندی عملکرد خوبی دارند. JointBoost همچنین از نمونههای ناهماهنگ برای بهبود عملکرد استخراج ویژگی استفاده میکند، که میتواند به طبقهبندی کننده کمک کند تا اشیاء پسزمینه را با ظاهری مشابه با تقاطعهای گورخری متمایز کند.
همانطور که در جدول 1 نشان داده شده است ، نتایج در سطح بلوک تصویر به جای سطح شی ارزیابی می شوند. تصاویر را به بلوک 25 × 25 (𝑝𝑖𝑥𝑒𝑙) تقسیم می کنیم و تعداد پیکسل های درست استخراج شده را می شماریم. میز 1تجزیه و تحلیل کمی نتایج استخراج این سه مجموعه داده است. در مجموعه داده I، به ترتیب 472، 439، 398، 143 پیکسل متعلق به گذرگاه های گورخر، 251، 68، 400، 845 در مجموعه داده II، و 352، 468، 395، 368 پیکسل در مجموعه داده III وجود دارد. بر اساس نتایج در مجموعه داده I، نرخ استخراج صحیح 90.3٪، 87.5٪، 94.2٪، 83.9٪، در مجموعه داده II 98.4٪، 91.2٪، 82.8٪، 69.3٪ و آنها 80.7٪، 83.8٪، 81.8٪ هستند. 88.9٪ در مجموعه داده III. درصدهای حذف حذف در مجموعه داده I 9.7٪، 12.5٪، 5.8٪، 16.1٪، در مجموعه داده II 1.6٪، 8.8٪، 17.25٪، 30.7٪ و در مجموعه داده III 19.3٪، 16.2٪، 18.2٪ است. ، 11.1٪.
3.1.2. اثربخشی ویژگی ها
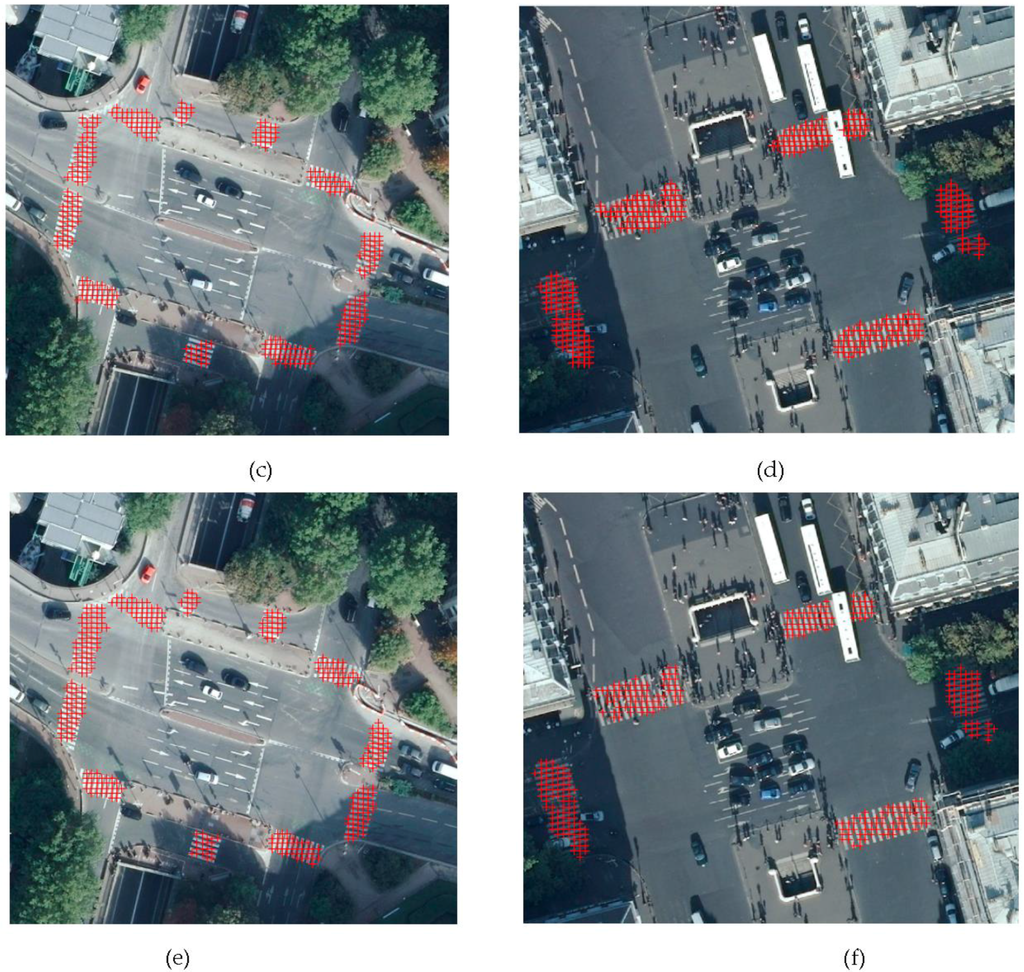
روش استخراج به ویژگیهای GLCM و ویژگیهای گابور ۲ بعدی برای قضاوت طبقهبندی نهایی متکی است. برای بررسی سهم این دو ویژگی برای استخراج، نتایج اعتبارسنجی را با سه شرط زیر مقایسه میکنیم: (1) تنها با استفاده از ویژگیهای GLCM. (2) تنها با استفاده از ویژگی های 2 بعدی گابور. (3) با استفاده از هر دو نوع ویژگی. ما آن شرایط را روی دو تصویر آزمایش کردیم تا سهم هر ویژگی را در استخراج نهایی ارزیابی کنیم.
در شکل 16 ، ستون سمت چپ نشان دهنده تصویر A شامل 11 گذرگاه گورخر، و ستون سمت راست نشان دهنده تصویر B شامل 5 گذرگاه گورخر است. ما عمداً تصاویری با تفاوت زیاد در آهنگهای رنگی انتخاب کردیم تا حساسیت تشخیص ویژگیها را به تن تصویر آزمایش کنیم. تصویر A به طور کلی بسیار روشن تر از تصویر B است. ما طبقه بندی کننده JointBoost را برای هر تصویر با استفاده از روش تشخیص ویژگی GLCM و سپس با استفاده از روش تشخیص ویژگی 2 بعدی گابور آموزش دادیم. شکل 16 a,b نتایج استخراج شده را تنها با استفاده از ویژگی های GLCM نشان می دهد. شکل 16 c,d نتایج استخراج شده را تنها با استفاده از ویژگی های گابور 2 بعدی نشان می دهد. در مقایسه با عملکرد نتایج بر اساس ویژگیهای گابور دو بعدی همانطور که در شکل 16 نشان داده شده استc،d، نتایج مبتنی بر ویژگی GLCM همانطور که در شکل 16 a,b نشان داده شده است، دقت کمتری دارند. با این حال، هنگامی که از هر دو ویژگی با هم استفاده می کنیم، همانطور که در شکل 16 e,f نشان داده شده است ، نتایج بهتری نسبت به هر کسی که بر اساس GLCM یا 2D Gabor است به دست می دهد.
همانطور که در شکل 16 e,f نشان داده شده است، الگوریتم می تواند با موفقیت برخی از قسمت های تقاطع گورخر را استخراج کند . برای ارائه اطلاعات دقیق از اثربخشی هر ویژگی، نتایج را با همان روش در بخش 3.1.1 ارزیابی کردیم . جدول 2تجزیه و تحلیل کمی از نتایج استخراج این ویژگی ها است. در تصویر A، 478 پیکسل متعلق به تقاطع گورخر، و 408 پیکسل در تصویر B وجود دارد. با استفاده از ویژگی های GLCM، 2D Gabor و ترکیبی از GLCM و 2D Gabor، نرخ استخراج صحیح در تصویر A 66.1٪، 70.5٪ است. و به ترتیب 77.8 درصد و در تصویر B به ترتیب 77.2 درصد، 87.4 درصد و 90.3 درصد هستند. درصد حذف حذف در تصویر A به ترتیب 33.9%، 29.5% و 22.2%، در تصویر B به ترتیب 23.0%، 12.6% و 9.7% می باشد. اگرچه GLCM در استخراج متقاطع گورخر مؤثرتر است، نتایج با در نظر گرفتن ویژگیهای گابور 2 بعدی نیز بهبود مییابد.
3.2. بازسازی شکل هندسی
تصاویر آزمایشی حاوی اطلاعات تداخل قابل توجهی هستند که باعث ایجاد مشکل در بازسازی شکل هندسی می شود. برای ارزیابی استحکام روش ما، آن را تحت شرایط مختلف از جمله تصاویر حاوی گذرگاه گورخر پوشیده، تقاطع گورخر غیر مستطیلی، تخریب رنگ و تقاطع گورخر نیمه سایه دار آزمایش می کنیم.
3.2.1. گذرگاه گورخر که توسط اجسام پوشیده شده است
این احتمال وجود دارد که راه راه ها توسط عابران پیاده، اتومبیل ها یا اتوبوس ها پوشانده شود که مرزهای نوار را به هم می زند. پس از فرآیند باینریزه شدن تصویر، این اختلالات ایرادات هندسی کوچکی را ایجاد می کند که نظم راه راه ها را از بین می برد. در نتیجه، برخی از گذرگاه های گورخر به دو یا چند قسمت تقسیم می شوند. با این حال، مرز هر نوار همچنان می تواند بر اساس ساختار تکراری جهانی گذرگاه های گورخر بازیابی شود.
در شکل 17 ، گذرگاه های گورخری A، B و E نتایج بازسازی هستند که در آن گذرگاه های گورخر توسط اتوبوس، عابران پیاده و سایه ها پوشانده شده است. F نتیجه بازسازی یک تقاطع گورخر تمیز را نشان می دهد. برای گذرگاه های گورخر C و D که با اتوبوس از هم جدا شده اند. آنها را می توان بر اساس قوانین تعریف شده در بخش 2.3.3 به یک گذرگاه متصل کرد، با استفاده از اصل تکرارپذیری فضایی. با توجه به تصویر A که شامل دو تقاطع گورخر است، الگوریتم ما آنها را به عنوان دو تقاطع گورخری مستقل استخراج می کند و آنها را در یکی ادغام می کند زیرا بسیار نزدیک هستند و پارامترهای هندسی بسیار مشابهی دارند. این الگوریتم با موفقیت پارامترهای هندسی را تخمین زده و عبور گورخر E را بازسازی می کند، حتی اگر یکی از گوشه های آن در تصویر ظاهر نشود. الگوریتم در بازسازی تقاطع گورخر G ناموفق است زیرا مساحت G برای الگوریتم برای یافتن مرزهای صحیح بسیار کوچک است.
3.2.2. تقاطع گورخر لوزی
همانطور که در شکل 18 نشان داده شده است، برخی از گذرگاه های گورخر به دلیل جهت گیری جاده ها به شکل لوزی بازسازی شده اند . در الگوریتم ما، معادله (9) توانایی توصیف نوارهای مورب با پارامترها را دارد. θm��و θp��. چالش با تقاطع گورخرهای لوزی در تنظیم مناسب پارامترها نیست، بلکه در تعیین مرز صحیح به دلیل شیب تقاطع گورخر است.
3.2.3. تقاطع گورخر با سایه
هنگام در نظر گرفتن اثرات سایه ها، نتیجه دوتایی شدن تحت تأثیر قرار می گیرد که بر بازسازی تأثیر می گذارد. در مرحله پیش پردازش، تصویر را از فضای RGB به فضای HSV [ 38 ] تبدیل می کنیم و یک تبدیل کلاه بالایی [ 39 ] برای کاهش تأثیر سایه اعمال می کنیم. این بر اساس این تصور است که تصویری از یک گذرگاه گورخر باید لحن مشابهی داشته باشد. در مرحله بعد، روش Otsu [ 40 ] را برای انتخاب آستانه مناسب برای باینری سازی تصویر اعمال می کنیم. این مراحل پیش پردازش تضمین می کند که یک مرز پایدار برای بازسازی به دست می آید.
در شکل 19 ، (A) یک گذرگاه گورخر است که تا حدی توسط سایه یک چراغ خیابان پوشیده شده است. و (ب) و (ج) گذرگاه گورخرهایی هستند که نیم سایه دارند. علاوه بر این، ویژگیهای راه راه سفید شبیه به شکل نوارهای متقاطع گورخر در انتهای (A) و (B) وجود دارد. روش ما بخش اصلی گذرگاههای گورخر را استخراج و بازسازی میکند، اما راهراههای انتهای دو تقاطع گورخر را استخراج و بازسازی میکند، زیرا نوارهای سفید از نظم تکراری گذرگاههای گورخر پیروی نمیکنند.
3.2.4. گذرگاه گورخر تار
در شرایطی که گذرگاههای گورخر به طور قابلتوجهی تار هستند، الگوریتم پیشنهادی در فرآیند استخراج و بازسازی مشکلاتی دارد. ویژگی های محاسبه شده از تصاویر تار غیر قابل اعتماد هستند که منجر به شکست استخراج می شود. علاوه بر این، خطاهایی را در فرآیند تخمین پارامتر تقاطع گورخر برای باینری سازی تصویر معرفی می کند.
کشش سطح خاکستری در مرحله پیش پردازش می تواند تصویر را تا حدی بهبود بخشد. شکل 20 تصویر کمی تار و نتایج بازسازی مربوط به آن است. با بهره مندی از استراتژی تنظیم پارامتر جهانی ما، بازسازی تاری تصویر را جبران می کند. با این حال، برای گذرگاه های گورخری که به طور جدی تحت تأثیر قرار گرفته اند، الگوریتم ما شکست می خورد.
4. بحث و نتیجه گیری
در این مقاله، ما یک روش جدید پیشنهاد کردهایم: (1) استخراج گذرگاههای گورخر از تصاویر هوایی با وضوح بالا بر اساس طبقهبندی کننده JointBoost و (2) بازسازی اشکال هندسی با استفاده از پارامترهای از پیش تعریفشده و ویژگی تکرارپذیری. در نهایت، آزمایشهایی با استفاده از چندین مثال برای تأیید روششناسی پیشنهادی در این مقاله انجام میشود. از آزمایشها، متوجه میشویم که الگوریتم JointBoost پیشنهادی و ویژگیهای استخراجشده توسط فیلترهای GLCM و 2D Gabor برای استخراج گذرگاههای گورخر کافی هستند. در روش بازسازی شکل هندسی، یک روش برازش شکل جهانی بر اساس مدل پارامتر هندسی و اصل تکرارپذیری فضایی متناظر برای بازسازی شکل هندسی تقاطع گورخر بسیار موثر است.
در طول فرآیند استخراج، مقیاس همچنان یک چالش است. یک طبقهبندیکننده معمولاً بهطور خاص برای تصاویر با وضوحهای فضایی خاص به خوبی کار میکند. ویژگیهای GLCM که ما استفاده میکنیم میتوانند اثربخشی استخراج را بهبود بخشند، اما پیادهسازی طبقهبندیکننده آموزشدیده از تصویری با وضوح فضایی برای پردازش تصویری با وضوح دیگر دشوار است. اگر میخواهیم امکانسنجی طبقهبندیکننده را بهبود ببخشیم، باید ویژگیهای کلیدی را پیدا کنیم که مستقل از مقیاس هستند، یا راهحلی پیدا کنیم که بهطور تطبیقی پارامترها را با توجه به وضوح تصویر و اندازه مناسب پنجره برای محاسبه ویژگیها تنظیم کند. اگرچه هر دو روش پیشنهادی بسیار چالش برانگیز هستند، مشکل به عنوان بخشی از کار آینده ما مورد بررسی قرار خواهد گرفت.
انواع مختلفی از نشانه گذاری زمین در جهان وجود دارد، حتی گذرگاه های گورخر نیز در مناطق مختلف اشکال مختلفی دارند. این کار کاربرد الگوریتم ما را محدود می کند. به عنوان مثال، الگوریتم ما برای تصاویر هوایی از سنگاپور، جایی که اکثر گذرگاههای گورخر مربعی و بدون نوارهای تکراری هستند، قابل استفاده نیست. با این حال، ما فکر میکنیم که طبقهبندیکننده JointBoost میتواند حتی برای انواع دیگر نشانهگذاری زمین، مانند جستجوی خودکار تصاویر برای محتوای خاص مانند هواپیماها و کشتیها، مفید باشد. ما کار خود را برای بهبود تشخیص ویژگی و همچنین توسعه الگوریتمهای برازش مناسب برای بسیاری از انواع علامتگذاری زمین گسترش خواهیم داد. در آینده، ما بر چگونگی کاهش وابستگی به تنظیم پارامترهای روش پیشنهادی تمرکز خواهیم کرد و آن را نه تنها در تصاویر با وضوح بالا هوایی در بسیاری از مناطق قابل استفاده خواهیم کرد.
















بدون نظر