

خلاصه
مجموعه داده های پوشش زمین برای مدل سازی سیستم زمین و تحقیقات تعامل انسان و طبیعت در مقیاس های محلی، منطقه ای و جهانی بسیار مهم هستند. آنها را می توان از داده های سنجش از دور با استفاده از روش های طبقه بندی تصویر به دست آورد. با این حال، در فرآیندهای طبقهبندی تصویر، مقادیر طیفی برای اکثر روشهای طبقهبندی توجه قابلتوجهی را به خود جلب کردهاند، در حالی که شکل منحنی طیفی به ندرت مورد استفاده قرار گرفته است، زیرا تعیین کمیت آن دشوار است. این مطالعه یک روش طبقهبندی را بر اساس این مشاهده ارائه میکند که منحنی طیفی از بخشها و مقادیر شدید خاصی تشکیل شده است. روش طبقهبندی ارائهشده شکل منحنی طیفی را کمی میکند و از تفاوتهای شکل طیفی در میان پوششهای زمین برای طبقهبندی تصاویر سنجش از دور استفاده کامل میکند. با استفاده از این روش، نقشههای طبقهبندی از دادههای TM (نقشهنگار موضوعی) با دقت کلی 0.834 و 0.854 برای دو منطقه آزمایشی مربوطه بهدست آمد. رویکرد ارائهشده در این مقاله، که با روشهای طبقهبندی تصویر قبلی که عمدتاً به ویژگیهای شباهت طیفی «مقدار» مربوط میشد، متفاوت است، بر ویژگیهای شباهت «شکل» منحنی طیفی تأکید میکند. علاوه بر این، این مطالعه برای تحقیقات طبقه بندی بر روی تصاویر فراطیفی و چند زمانی مفید خواهد بود. ویژگی های شباهت منحنی طیفی علاوه بر این، این مطالعه برای تحقیقات طبقه بندی بر روی تصاویر فراطیفی و چند زمانی مفید خواهد بود. ویژگی های شباهت منحنی طیفی علاوه بر این، این مطالعه برای تحقیقات طبقه بندی بر روی تصاویر فراطیفی و چند زمانی مفید خواهد بود.
کلید واژه ها:
طبقه بندی تصویر ; منحنی طیفی ; شکل ؛ کمی سازی
1. معرفی
پوشش زمین و دینامیک آن نقش عمده ای در تجزیه و تحلیل و ارزیابی فرآیندهای سطح زمین دارد که بر مؤلفه های زیست محیطی، اجتماعی و اقتصادی پایداری تأثیر می گذارد [ 1 ، 2 ]. اطلاعات دقیق و به روز پوشش زمین ضروری است. چنین اطلاعاتی را می توان با استفاده از تکنیک های طبقه بندی تصاویر از راه دور [ 1 ] به دست آورد. بنابراین، طبقه بندی تصاویر سنجش از دور در توسعه کنونی تجزیه و تحلیل تصویر دیجیتال مورد توجه فزاینده ای است [ 3 ]. در طول چند دهه گذشته، تعداد قابل توجهی از رویکردهای طبقه بندی برای طبقه بندی داده های سنجش از دور توسعه یافته است. متداول ترین رویکردهای مورد استفاده شامل طبقه بندی نظارت شده و بدون نظارت [4 ، 5 ]. بسیاری از روش های طبقه بندی پیشرفته در دو دهه گذشته ارائه شده اند، مانند شبکه های عصبی مصنوعی (ANN) [ 6 ، 7 ]، ماشین بردار پشتیبان (SVM) [ 8 ، 9 ]، و طبقه بندی درخت تصمیم [ 10 ، 11 ]. تجزیه و تحلیل تصویر مبتنی بر شی (OBIA) [ 12 ، 13 ، 14 ]، که با طبقهبندیکنندههای مبتنی بر پیکسل متفاوت است، برای مشکل ناهمگونی محیطی مؤثر گزارش شده است.
امضاهای طیفی، که به سادگی نمودارهای بازتاب طیفی یک جسم به عنوان تابعی از طول موج [ 15 ] هستند، اطلاعات کیفی و کمی مهمی را برای طبقه بندی تصویر ارائه می کنند. بنابراین، امضاهای طیفی مبنای طبقه بندی داده های سنجش از دور هستند. شایان ذکر است که امضاهای طیفی نه تنها مقادیر طیفی بلکه شکل منحنی طیفی را نیز شامل می شود. با این حال، برای اکثر رویکردهای طبقهبندی با استفاده از امضاهای طیفی، مقادیر طیفی توجه قابلتوجهی دریافت کردند در حالی که تمرکز بر شکل منحنی طیفی از بین رفت. این به طور عمده در جنبه های زیر منعکس شد: (1) برخی از آمار توصیفی (به عنوان مثال، میانگین، حداکثر، و حداقل) [ 10 ، 15 ، 16] از نمونه های آموزشی بر اساس یک فرض توزیع نرمال تولید شدند. (2) برخی از شاخص های طیفی مانند NDVI (شاخص تفاوت عادی شده گیاهی) و NDWI (شاخص تفاوت عادی آب) [ 17 ، 18 ، 19 ، 20 ] به عنوان متغیرهای کمکی ساخته شدند. و (3) برای تصاویر فراطیفی، یک نقشهبر زاویه طیفی (SAM)، که شباهت بین طیف مرجع و هدف را تعیین میکند، اغلب محاسبه میشود [ 21 ، 22]. بر اساس فرآیند بالا، طبقهبندی تصویر بیشتر با در نظر گرفتن برخی معیارهای طبقهبندی، مانند فاصله جفریز-ماتوزیتا، واگرایی متوسط و تابع احتمال بیزی انجام شد. لازم به ذکر است که در طی فرآیندهای فوق، باندهای طیفی کاهش می یابد و تفسیر فیزیکی اصلی تصویر به دلیل از بین رفتن شکل منحنی طیفی نمی تواند به خوبی حفظ شود.
تجزیه و تحلیل شکل در طبقه بندی سنجش از دور مانند سایر کاربردهای تشخیص الگو [ 23 ]، مانند بینایی کامپیوتر [ 24 ] و جریان های ترافیک [ 25 ، 26 ] توجه کافی را دریافت نکرده است. با توجه به کار لین و همکاران. [ 25 ]، شکل منحنی را می توان حفظ کرد و برای طبقه بندی وسایل نقلیه از طریق کدگذاری منحنی های جمع آوری شده از حلقه های القایی استفاده کرد. از آنجایی که وظایف طبقهبندی وسایل نقلیه با شناسایی منحنیهای جمعآوریشده از حلقههای القایی و طبقهبندی تصاویر سنجش از دور با شناسایی منحنیهای طیفی مشابه هستند، تکنیک کدگذاری شکل منحنی را میتوان به طبقهبندی تصاویر سنجش از دور معرفی کرد.
هدف این مقاله ارائه یک طبقهبندیکننده دادههای سنجش از دور جایگزین است که به طور کامل از روند تغییرات طیفی، یعنی شاخههای صعودی، نزولی و مسطح استفاده میکند. روشی برای کدگذاری شکل منحنی، که اگرچه به ندرت مورد استفاده قرار میگیرد، برای طبقهبندی وسایل نقلیه برای پارامترسازی شکل منحنی طیفی استفاده میشود، ارائه خواهد شد. روش ارائه شده از تفاوت شکل بین منحنیهای طیفی شی در مقادیر شدید (مانند قلهها و درهها) و روندها (مانند شاخههای صعودی، نزولی و صاف) بهره کامل میبرد. یک تفاوت کلیدی با رویکردهای قبلی، تبدیل مقایسه شباهت مقادیر طیفی با جدول 2 بعدی (2-D) منطبق است که تمایل تغییرات طیفی را ثبت می کند. این مقاله به شرح زیر تنظیم شده است: بخش 2منطقه و داده های مورد مطالعه را ارائه می دهد. روش، از جمله توصیف کمی منحنی های طیفی، تطبیق شکل طیفی و ارزیابی دقت در بخش 3 توضیح داده شده است . نتایج طبقه بندی و ارزیابی در بخش 4 آورده شده است . بخش 5 بحث در مورد روش را ارائه می دهد. در نهایت، بخش 6 شامل نتیجه گیری است.
2. منطقه مطالعه و داده ها
2.1. منطقه مطالعه
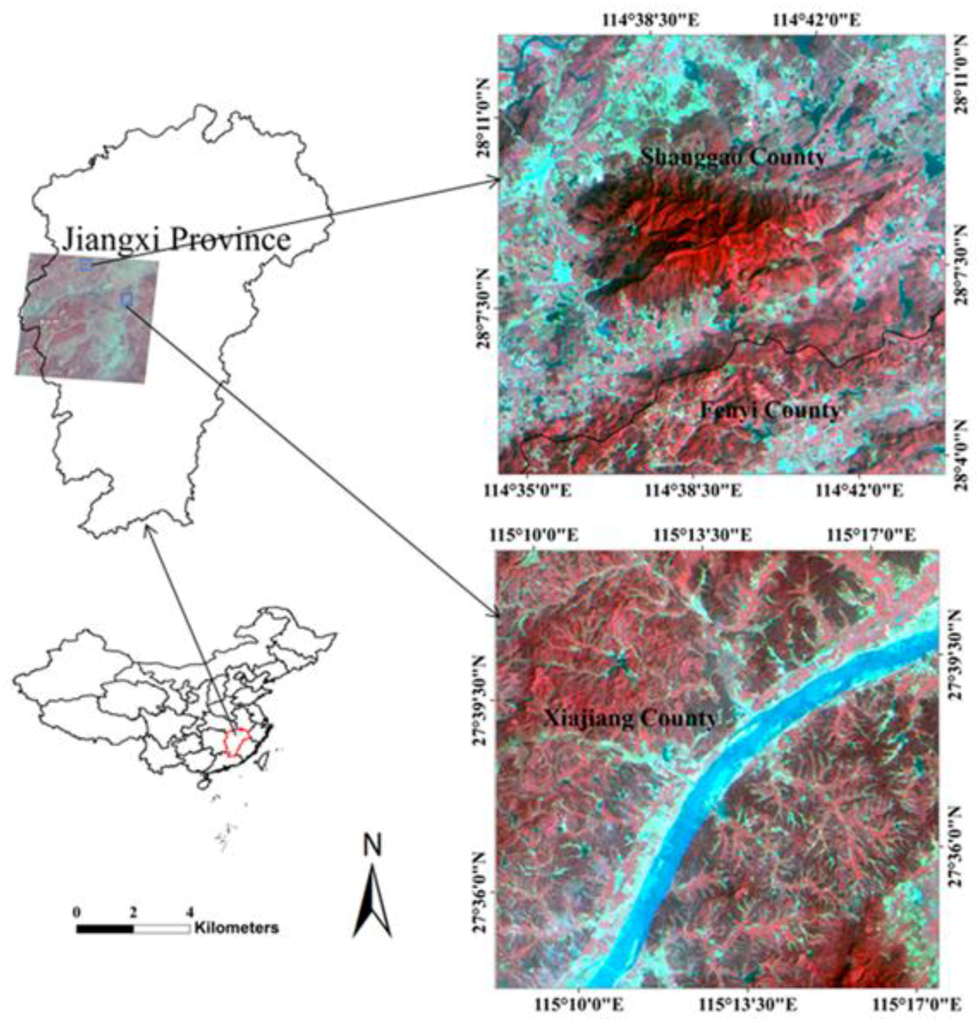
منطقه مورد مطالعه در غرب میانه استان جیانگشی، چین واقع شده است و محدوده 26 درجه و 29 دقیقه و 18 دقیقه تا 28 درجه و 21 دقیقه و 42 دقیقه عرض جغرافیایی شمالی و 113 درجه و 26 دقیقه و 13 دقیقه تا 115 درجه و 45 دقیقه شرقی را پوشش می دهد. طول جغرافیایی 50”E. موقعیت جغرافیایی منطقه مورد مطالعه در شکل 1 نشان داده شده است . این منطقه دارای آب و هوای موسمی نیمه گرمسیری شرقی است، یعنی گرم و مرطوب، آفتاب فراوان و بارندگی، و چهار فصل متمایز. انواع غالب ژئومورفولوژیکی کوه ها، تپه ها و دشت ها هستند. علاوه بر این، نوع سطح زمین عمدتاً توسط جنگل، زمین زراعی و آب مشخص می شود.
2.2. جمع آوری و پردازش داده ها
2.2.1. TM داده ها و پردازش
تصاویر ماهواره ای مورد استفاده در این تحقیق Landsat 5 TM Level 1T بود که در 23 سپتامبر 2006 با مسیر و ردیف 122 و 41 ثبت شد. سنسور TM دارای چهار باند در طول موج های مرئی و NIR (TM 1: 450-520 نانومتر، TM 2: 520-600 نانومتر، TM 3: 630-690 نانومتر و TM 4: 760-900 نانومتر)، دو باند در موج SWIR است. (TM 5: 1550-1570 نانومتر و TM 7: 2080-2350 نانومتر)، و یک باند در طول موج مادون قرمز حرارتی (TM 6: 10400-12500 نانومتر) [ 27 ]. هر شش نوار بازتابی (1-5 و 7) دارای وضوح فضایی 30 متر هستند [ 27 ].
اعداد دیجیتال (DN) باندهای 1-5 و 7 با استفاده از ضرایب کالیبراسیون رادیومتری به دست آمده از فایل هدر TM به تشعشعات در حسگر تبدیل شدند. علاوه بر این، یک تصحیح اتمسفر برای محاسبه بازتاب سطح از تشعشعات در حسگر با استفاده از نرم افزار FLAASH انجام شد. زاویه اوج خورشیدی و زمان اکتساب صحنه TM، ورودی به نرم افزار FLAASH نیز از فایل هدر TM به دست آمد. طبقه بندی تصویر مبتنی بر شکل طیفی فرآیندی زمان بر است. بنابراین، دو تصویر زیرمجموعه (برچسب شده به عنوان مناطق A و B) با اندازه پیکسل 512 × 512 به عنوان نمونه برای انجام طبقهبندی تصویر مبتنی بر شکل طیفی استفاده شد. موقعیت جغرافیایی دو تصویر زیر مجموعه در شکل 1 نشان داده شده است .
2.2.2. داده های مرجع Google Earth
اخیراً، ابزار تصویرسازی Google Earth به سرعت توسعه یافته است و برای تحقیقات در مورد طبقه بندی پوشش زمین به کار گرفته شده است. تصاویر با وضوح فضایی بالا منتشر شده از Google Earth می توانند برای اهداف اعتبارسنجی استفاده شوند [ 27 ]. در این مطالعه، تصاویر Google Earth را برای ارزیابی عملکرد روش طبقهبندی مبتنی بر شکل طیفی انتخاب کردیم.
3. روش شناسی
3.1. زمینه
ویژگی های طیفی مختلف پاسخ های طیفی متفاوتی را برمی انگیزند. از لحاظ نظری، ویژگی های ذاتی هر نوع شی را می توان با منحنی طیفی آن منعکس کرد. اختلاف در شکل منحنی طیفی به دلیل ترکیب مواد و ساختار متمایز در میان انواع مختلف پوششهای زمین مانند پوشش گیاهی، خاک، آب و غیره همیشه وجود دارد. با این حال، طیف بازتاب یک سطح طبیعی بسیار پیچیده است با این واقعیت که اجسام مختلف دارای این واقعیت هستند. طیف یکسان و یک جسم یکسان دارای طیف های مختلف است. این یک مشکل رایج در زمینه طبقه بندی سنجش از دور است. استفاده از تحلیل شکل در تحقیق طبقه بندی ممکن است ایده ای برای حل این مشکل باشد. انگیزه کار ما مشاهده تغییرات شکل کوچک بین اشیاء مختلف است. همانطور که در نشان داده شده استشکل 2علیرغم این واقعیت که طبقات زمین زراعی و جنگل مقادیر میانگین طیفی تقریباً برابری را نشان می دهند (هر دو کلاس بین 0.1165 و 0.1221)، تفاوت ظریف در بازتاب در محدوده طیفی معینی را می توان برای اجسام مختلف یافت. ما به تفاوت شکل بین باند 2 و باند 3 علاقه مندیم. از شکل مشخص است که منحنی مربوط به کلاس زمین زراعی روند نزولی را نشان می دهد در حالی که شیب منحنی مربوط به کلاس جنگل صفر است. تجزیه و تحلیل شکل با تجزیه منحنی طیفی به تعدادی از بخشهای متوالی، که نشاندهنده روندهای متغیر شکل (مانند شاخههای صعودی، نزولی و صاف) است، در این مورد سود خواهد داشت، در حالی که تشخیص تفاوت ظریف اغلب با الگوریتمهای مبتنی بر سخت است. در مورد ویژگی های ارزش طیفی کل طیف [28 ]. بنابراین، این مطالعه از عامل “شباهت / تفاوت بین اشکال منحنی طیفی” به عنوان مبنای طبقهبندی تصاویر سنجش از دور استفاده میکند. برای انجام این کار، شکل منحنی طیفی باید با استفاده از روش های شرح داده شده در زیر کمی سازی شود.
3.2. نمادسازی مورفولوژی منحنی
بر اساس اصل مورفولوژی منحنی، یک منحنی طیفی را می توان به دو تکواژ مختلف، یعنی تکواژهای بنیادی و توسعه یافته تجزیه کرد [ 24 ، 25 ، 28 ، 29 ]. تکواژ بنیادی بخشهای منحنی طیفی شامل بخشهای صعودی، نزولی و تخت را توصیف میکند. تکواژ توسعه یافته به عنوان مقدار شدید در اوج و/یا دره منحنی طیفی تعریف می شود. این تکواژها را می توان با استفاده از کدهایی نمادین کرد: بخش صعودی که به ترتیب “0”، بخش نزولی “1”، بخش مسطح “2” و قله و دره منحنی طیفی “3” و “4” نشان داده می شود. شکل 3 نمونه ای از نمادسازی یک منحنی طیفی را نشان می دهد.
بر اساس نمادسازی فوق، ویژگی های تغییرات اساسی (صعودی / نزولی) یک منحنی طیفی را می توان توصیف کرد. علاوه بر این، یک بردار تکواژ برای تعیین کمیت صحیح منحنی طیفی مورد نیاز است. بنابراین، ما بردار تکواژ را به صورت B = (T, C 0 , C 1 , …, C n-1 ) تعریف کردیم که در آن T کد تکواژ است و C 0 , C 1 , …, C n-1 نشان دهنده n ویژگی تکواژ، اینها مقادیر عددی هستند که منحنی را توصیف می کنند. همانطور که قبلا ذکر شد، دو نوع تکواژ وجود دارد. بنابراین، بردارهای تکواژ نیز به یک بردار تکواژ بنیادی و یک بردار تکواژ توسعه یافته که به عنوان Bb و B برچسبگذاری شدند، گروهبندی شدند .s به ترتیب. از طریق استفاده از بردارهای تکواژ، یک منحنی طیفی به راحتی به یک جدول دو بعدی متشکل از یک سری ویژگی تبدیل شد. در جدول دو بعدی، سطرهای دوم و بعدی به انواع بردارهای تکواژ اشاره دارند و ستونها ویژگیهای هر بردار را نشان میدهند. هر بردار به صورت زیر تشکیل شده است:
B b (بردار تکواژ پایه) = (کد تکواژ، موقعیت ابتدایی تکواژ، موقعیت پایانی تکواژ، و مقدار میانگین تکواژ). B s (بردار تکواژ گسترش یافته) = (کد تکواژ، شماره دنباله قله/دره، موقعیت تکواژ، و مقدار تکواژ).
منحنی طیفی که در شکل 4 نشان داده شده است، مخصوص داده های سنجش از دور، مانند داده های TM، از دو بخش صعودی (به ترتیب از باندهای 1 تا 2 و باندهای 3 تا 4)، دو بخش نزولی (از باندهای 2 تا 3) تشکیل شده است. و به ترتیب باندهای 4 تا 6)، دو قله (به ترتیب در باندهای 2 و 4 قرار دارند) و یک دره (واقع در باند 3). اینکه آیا باندهای j تا k قطعات صعودی، نزولی یا مسطح هستند با معیارهای زیر مشخص شده در جدول 1 تعیین می شود.. به طور خاص، بخش صعودی، نزولی یا صاف بین دو نقطه عطف است که در آن منحنی از روند کاهشی به روند افزایشی یا به صافی تغییر میکند و بالعکس. با استفاده از روش نمادسازی و ترکیب ویژگی هر بردار تکواژ همانطور که در بالا تعریف شده است، می توان مقادیر جدول 2 را که شرح عددی طیف بازتاب نشان داده شده در شکل 4 را نشان می دهد ، به دست آورد.
3.3. تطبیق شکل طیفی
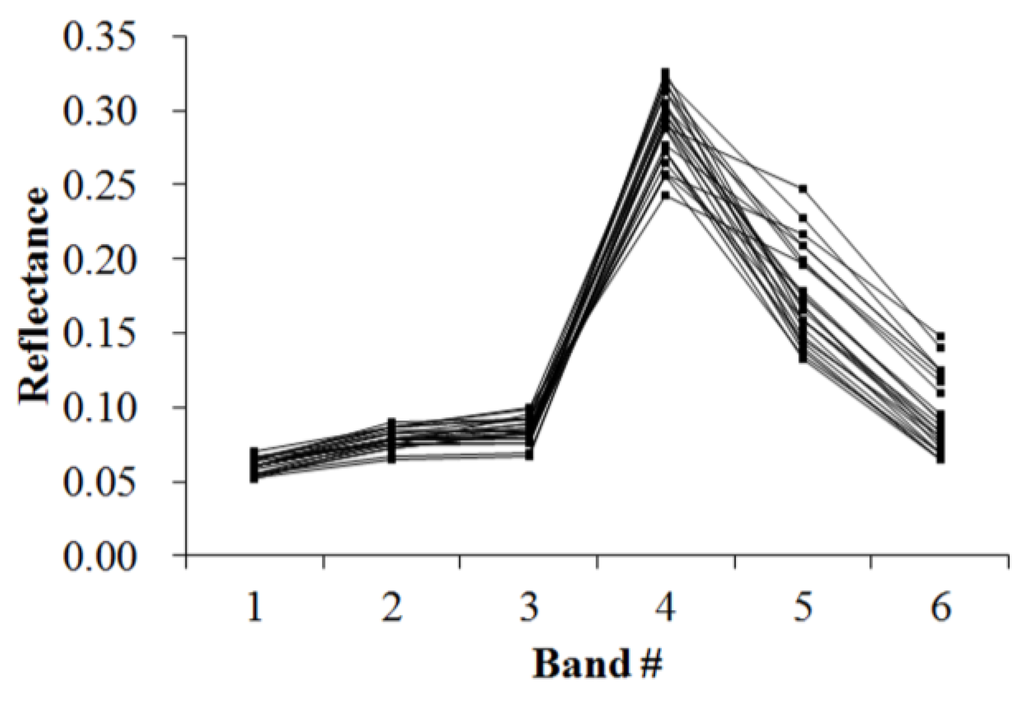
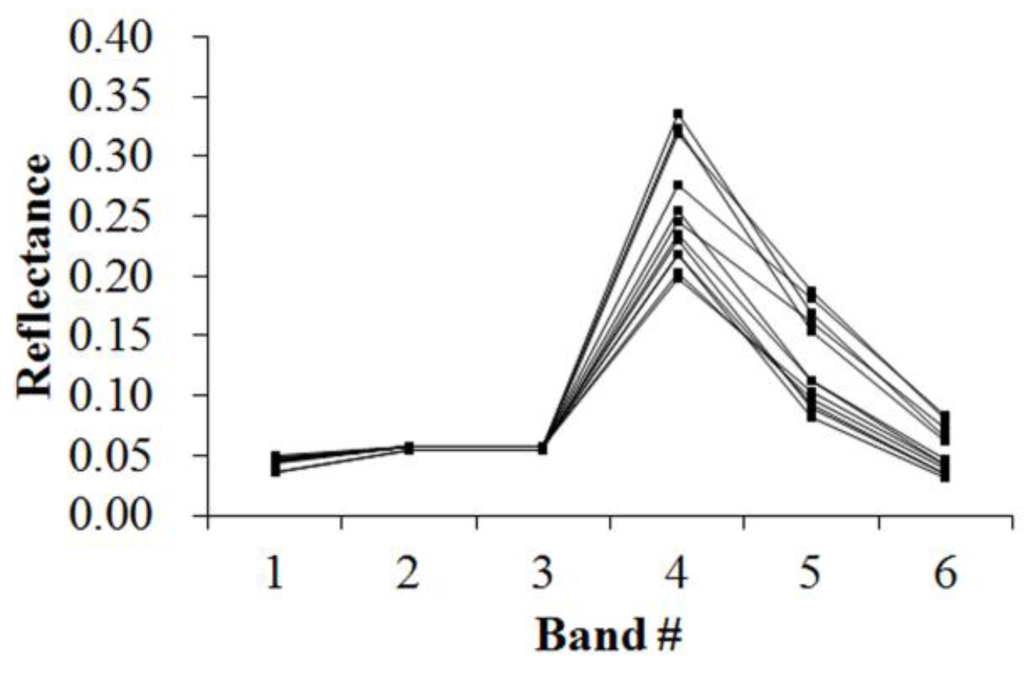
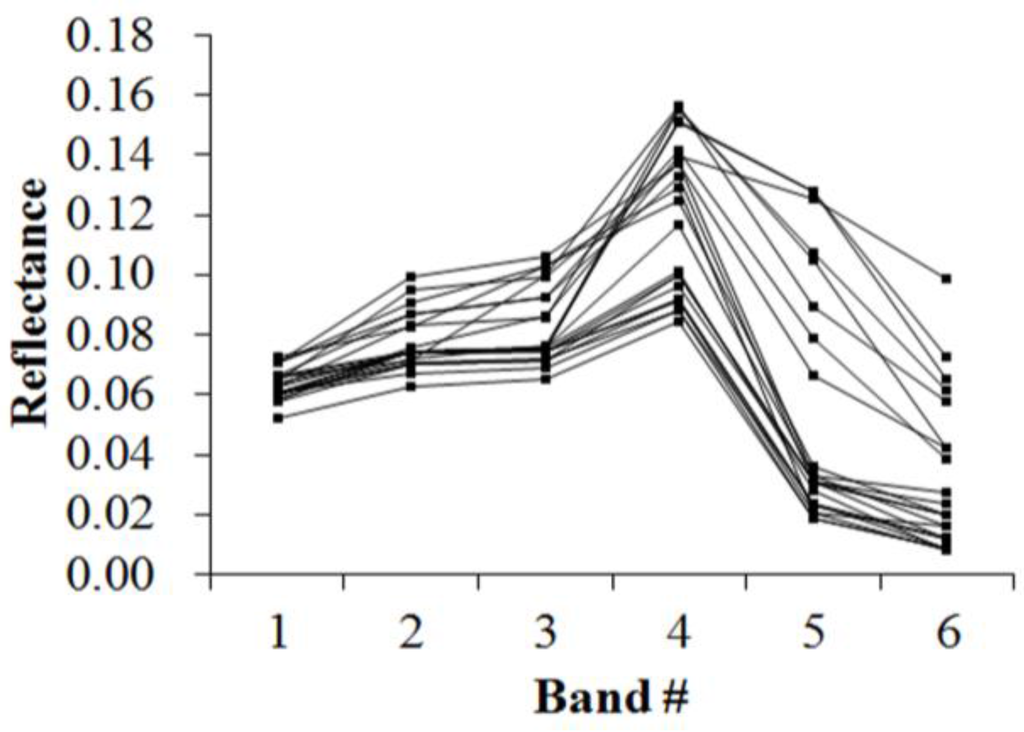
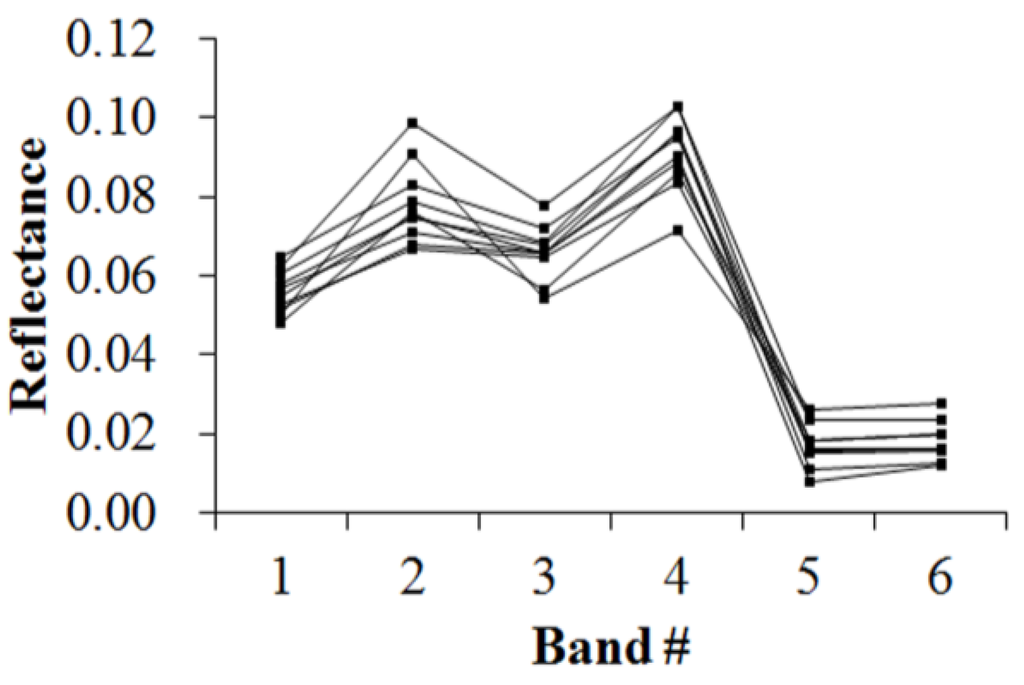
استفاده از روش تطبیق طیفی برای طبقه بندی موثر پیکسل ها به دسته های شناخته شده ضروری است. این الگوریتم تطبیق نحوه مقایسه طیف های ناشناخته یا هدف با مرجع شناخته شده را تعریف می کند [ 15 ]. در اینجا، ویژگی های مرجع شناخته شده، الگوهای شناسایی نامیده می شوند. تعریف بردار تکواژ برای الگوی شناسایی شبیه به جدول 2 است، اما آخرین ستون الگوی شناسایی، حدود بالا و پایین طیفی از مشخصه های قابل اندازه گیری را نشان می دهد. طراحی یک الگوی شناسایی مستلزم انتخاب نمونههای طبقهبندی است که معرف ویژگیهای طیفی طبقات باشد. لازم به ذکر است که داده های تصویر سنجش از راه دور به دلیل درجه بالایی از پیچیدگی و بی نظمی شناخته شده اند [ 6]]. لازم است محدوده ها در الگوی شناسایی مطابق با نتایج شناسایی اولیه تنظیم شوند تا از معرف بودن الگوی شناسایی اطمینان حاصل شود. در غیر این صورت، داده های نمونه نمی توانند نماینده تغییرات طیفی آن نوع پوشش زمین باشند. در نهایت، آستانه بهینه، که بر اساس آمار نمونه های آموزشی است، باید تعداد کم هشدارهای اشتباه و تعداد بالایی از طبقه بندی های صحیح را حفظ کند. شکل 5 ، شکل 6 ، شکل 7 ، شکل 8 ، شکل 9 ، شکل 10 ، شکل 11 و شکل 12منحنی های طیفی جمع آوری شده از نمونه ها را برای تعیین این الگوهای شناسایی نمایش دهید ( جدول 3 ، جدول 4 ، جدول 5 ، جدول 6 ، جدول 7 ، جدول 8 ، جدول 9 و جدول 10 ). با نمادسازی منحنی ها در شکل 5 ، شکل 6 ، شکل 7 ، شکل 8 ، شکل 9 ، شکل 10 ، شکل 11 و شکل 12 با استفاده از روش نمادسازی شرح داده شده در بخش 3.2، جدول مربوطه را می توان بدست آورد. برای منطقه مورد مطالعه B، الگوهای شناسایی مشابه با منطقه A است، اما آستانه های مناسب در ستون آخر برای منطقه B. تعداد کل نمونه های مورد استفاده برای تعیین این معابد شناسایی برای منطقه A 224 و برای منطقه B 209 است. اشیاء تصویر در محدوده های تعریف شده از الگوی شناسایی به یک کلاس خاص اختصاص داده می شوند، در حالی که آنهایی که خارج از محدودیت ها هستند به کلاس های دیگر اختصاص داده می شوند.
به دلیل پیچیدگی طبیعی و این واقعیت که یک شیء یکسان دارای طیف های مختلف است، بیش از یک الگوی شناسایی برای یک نوع شی طراحی شده است. در همین حال، می توان توجه داشت که الگوهای شناسایی در جدول 3 ، جدول 5 و جدول 8 به ترتیب برای کلاس های زمین زراعی، جنگل و آب مشابه هستند. همین پدیده در جدول 4 ، جدول 6 و جدول 9 رخ می دهد . این همچنین نشان می دهد که اشیاء مختلف دارای طیف یکسانی هستند. با این حال، تفاوت بین آنها در محدوده آستانه متفاوت در آخرین ستون در یک ردیف خاص نهفته است. به طور خاص، جدول 3 کمترین آستانه 0.0718 را در ردیف پنجم در مقایسه با ردیف پنجم دارد.جدول 5 با بالاترین مقدار 0.0717 و جدول 3 دارای کمترین آستانه 0.1553 در ردیف هفتم در مقابل جدول 8 با بالاترین مقدار 0.1408 است. آستانه های مختلف در الگوهای شناسایی مشابه، که باعث می شد اشیاء مختلف قابل تفکیک باشند، به صورت پررنگ بودند. جدول 7 و جدول 10 که به ترتیب اشکال منحنی طیفی منحصربهفرد برای کلاسهای جنگل و آب را نشان میدهند، با سایرین متفاوت هستند.
برای انجام فرآیند طبقهبندی، از یک الگوریتم تطبیق که امکان تطبیق چند سطحی را فراهم میکند در این مطالعه استفاده شد. برای یک منحنی هدف S و الگوی شناسایی شناخته شده M، این الگوریتم طبق مراحل زیر اجرا میشود: (1) بردارهای تکواژ (ستونهای دوم تا چهارم) را از جدول دو بعدی که منحنی هدف S و الگوی شناسایی را توصیف میکند، استخراج کنید. م، به ترتیب. هر ستون با یک رشته نمایش داده می شود. بنابراین، شش رشته در این مرحله تولید شد، سه رشته برای منحنی هدف S و سه رشته برای الگوی شناسایی M. (2) رشتههای منحنی هدف S را با رشتههای مربوط به الگوی شناسایی M مقایسه کنید. تغییر شکل بین منحنی هدف S و الگوی شناسایی M. (3) قضاوت کنید که آیا مقادیر در آخرین ستون جدول 2-D مربوط به منحنی هدف S در محدوده آستانه در آخرین ستون الگوی شناسایی M است یا خیر. اگر چنین است، تطابق نهایی با الگوی M به پایان می رسد. پیکسل تطبیق مربوط به منحنی هدف S متعلق به دسته مربوطه از الگوی شناسایی M است. مراحل فوق برای هر پیکسل اجرا می شود. مزایای این الگوریتم تطبیق در انعطاف پذیری و شناسایی اولیه با تغییر شکل نهفته است. اگر تنوع شکل طیفی منحنی هدف با الگوی شناسایی مطابقت نداشته باشد، با وجود مقادیر طیفی مشابه، منحنی هدف به آن کلاس خاص اختصاص داده نمیشود. مسابقه نهایی با الگوی M به پایان رسید. پیکسل تطبیق مربوط به منحنی هدف S متعلق به دسته مربوطه از الگوی شناسایی M است. مراحل فوق برای هر پیکسل اجرا می شود. مزایای این الگوریتم تطبیق در انعطاف پذیری و شناسایی اولیه با تغییر شکل نهفته است. اگر تنوع شکل طیفی منحنی هدف با الگوی شناسایی مطابقت نداشته باشد، با وجود مقادیر طیفی مشابه، منحنی هدف به آن کلاس خاص اختصاص داده نمیشود. مسابقه نهایی با الگوی M به پایان رسید. پیکسل تطبیق مربوط به منحنی هدف S متعلق به دسته مربوطه از الگوی شناسایی M است. مراحل فوق برای هر پیکسل اجرا می شود. مزایای این الگوریتم تطبیق در انعطاف پذیری و شناسایی اولیه با تغییر شکل نهفته است. اگر تنوع شکل طیفی منحنی هدف با الگوی شناسایی مطابقت نداشته باشد، با وجود مقادیر طیفی مشابه، منحنی هدف به آن کلاس خاص اختصاص داده نمیشود.
3.4. ارزیابی دقت
روش ماتریس خطا، که رایجترین رویکرد برای ارزیابی دقت کلاسهای طبقهبندی است [ 30 ، 31 ]، در این مطالعه برای ارزیابی دقت تصاویر طبقهبندیشده، با تصاویر با وضوح بالا از Google Earth به عنوان مرجع استفاده شد. برای تولید ماتریس خطا، تعدادی نمونه که به طور تصادفی در مناطق A و B توزیع شده اند مورد نیاز است. روش مبتنی بر توزیع چند جملهای برای محاسبه تعداد نمونه [ 16 ] استفاده شد:
ن=سمن( 1- _سمن) Γب2منن=سمن(1–سمن)Γبمن2
که در آن s i نسبت مساحت کلاس i است که در بین همه کلاس ها نزدیک به 50٪ است، b i دقت مطلوب کلاس i است ، Γ مقدار توزیع χ2 با درجه آزادی 1 و احتمال 1 است. − (1 − α)/n، α سطح اطمینان و n تعداد کلاسها است.
به دلیل کمبود اطلاعات در مورد نسبت مساحت هر کلاس، الگوریتم توزیع چند جمله ای در بدترین حالت قرار داشت. به دنبال کار هو و همکاران. [ 16 ]، ما فرض کردیم که نسبت مساحت هر طبقه 50 درصد از منطقه مورد مطالعه است. سپس معادله (1) به صورت زیر بازنویسی شد:
ن=Γ4ب2منن=Γ4بمن2
در این مطالعه، α روی 85% و b i روی 5% تنظیم شد. با توجه به شکل 13 و شکل 14 ، n برای مناطق A و B به ترتیب 4 و 5 بود. بنابراین، N برای مناطق A و B به ترتیب 433 و 471 است. آمار زیر برای ارزیابی دقت طبقهبندی تصویر [ 32 ] اتخاذ میشود: دقت کاربر (UA)، دقت تولیدکننده (PA)، دقت کلی (OA) و ضریب کاپا.
4. نتایج طبقه بندی و ارزیابی
4.1. نتایج طبقه بندی
با استفاده از برنامه توسعهیافته بر روی پلت فرم MATLAB، روش طبقهبندی مبتنی بر شکل طیفی برای طبقهبندی تصاویر زیر مجموعه انجام شد. تصاویر طبقه بندی شده برای مناطق A و B به ترتیب در شکل 13 و شکل 14 نشان داده شده است . برای تسهیل تفسیر نتایج، تصاویر با رنگ کاذب مربوطه نیز در شکل 13 و شکل 14 نمایش داده شده است . مقایسه بصری نقشه های پوشش زمین به دست آمده با روش ارائه شده با تصاویر رنگ کاذب، همخوانی خوبی را بین آنها نشان می دهد.
مطابق با نقاط نمونه تصادفی، ماتریس های خطا ( جدول 11 و جدول 12 ) با دقت کلی و ضرایب کاپا 0.834 و 0.677 (نگاه کنید به جدول 13 ) برای جدول 11 و 0.854 و 0.748 ( به جدول 0.743 ) تولید شدند. 12، به ترتیب. با توجه به کلاس فردی، UA و PA مربوط به کلاس های جنگل و زمین زراعی برای هر دو منطقه A و B بیش از 0.74 است. کلاس آب UA بالای 0.94 و PA 0.97 برای منطقه B و PA (0.63) به طور کلی نشان می دهد. بالا برای منطقه A. PA برای کلاس شهری بالای 0.60 برای هر دو منطقه A و B و UA پایین است. کلاس تالاب UA 0.75 و PA 0.60 را به دست می آورد. نتایج نشاندهنده توافق خوبی بین نقشههای طبقهبندیشده بهدستآمده با رویکرد مبتنی بر شکل طیفی و تصاویر با وضوح بالا Google Earth است. بنابراین، روش طبقهبندی مبتنی بر شکل طیفی برای تحقیقات بیشتر قابل اجرا و ارزشمند است.
با توجه به در نظر گرفتن دو ناحیه مختلف در این مطالعه، به منظور کشف اینکه آیا هیچ معیار دقتی تحت تأثیر انتخاب منطقه قرار نگرفته است، آزمون های ANOVA یک طرفه با استفاده از مساحت به عنوان عامل و مقادیر دقت به دست آمده از دو ناحیه در نظر گرفته شده انجام شد. به عنوان متغیرهای پاسخ [ 33 ]. نتایج نشان داد که UA و PA تحت تأثیر انتخاب منطقه در سطح اطمینان 95٪ قرار نگرفتند. بنابراین UA و PA برای دقت تصاویر طبقه بندی شده مناسب هستند.
4.2. مقایسه با سایر روش ها
برای تعیین عملکرد نسبی طبقهبندی مبتنی بر شکل طیفی، روشهای طبقهبندی ماشین بردار پشتیبان (SVM) و حداقل فاصله (MD) نیز برای طبقهبندی نواحی A و B اجرا شدند. SVM انتخاب شده است زیرا به طور گسترده به عنوان یک طبقهبندی برجسته در گزارش شده است. سنجش از دور [ 9 ، 34 ]. در این مقاله الگوریتم SVM با تابع هسته پایه شعاعی پیاده سازی شد. الگوریتم MD یکی از روش های طبقه بندی نظارت شده سنتی است و اکنون به خوبی درک شده است. برای ایجاد مقایسه مستقیم بین روشهای مختلف، از نمونههای آموزشی یکسان برای سه روش استفاده شد. شکل 13 و شکل 14 به ترتیب نتایج طبقه بندی را برای مناطق A و B ارائه می کنند.جدول 13دقت طبقه بندی را در بین سه روش خلاصه می کند. با قضاوت بر اساس کل نتایج، روش مبتنی بر شکل طیفی بهترین OA (0.834 برای منطقه A و 0.854 برای منطقه B) و ضریب کاپا (0.677 برای منطقه A و 0.748 برای منطقه B) و به دنبال آن روش SVM را به دست میآورد. ضریب OA و کاپا به دست آمده توسط MD کمترین است. با توجه به UA، طبقهبندی مبتنی بر شکل طیفی بیشترین ارزش را برای طبقههای زراعی، آب و شهری در منطقه A و طبقات جنگل، زراعی و شهری در منطقه B نشان میدهد. از نظر PA، آمار بهدستآمده از طبقهبندی مبتنی بر شکل طیفی بالاترین کلاس جنگل در منطقه A و برای همه طبقات به جز تالاب در منطقه B. همان مقدار PA 0.6 مربوط به کلاس تالاب در منطقه B با سه روش به دست آمد. ممکن است توجه داشته باشید که دقت کلاس شهری به طور کلی برای این سه روش پایین است. از آنجایی که در مناطق شهری، منحنی طیفی یک پیکسل منفرد معمولاً نمیتواند یک طبقه پوشش زمین را نشان دهد، بلکه ترکیبی از دو یا چند کلاس است. تعریف شکل طیفی برای یک طبقه شهری به دلیل ترکیب اطلاعات سایر طبقات غیر شهری معقول نیست. بنابراین، پیکسل هایی که توسط طبقات غیر شهری در نظر گرفته شده در مطالعه با موفقیت شناسایی نشدند، برای هر سه روش به کلاس شهری اختصاص داده شدند. پیچیدگی و تنوع اشیاء شهری همچنان یک چالش در تشخیص اشیاء شهری از دادههای ماهوارهای با وضوح بالا است. تعریف شکل طیفی برای یک طبقه شهری به دلیل ترکیب اطلاعات سایر طبقات غیر شهری معقول نیست. بنابراین، پیکسل هایی که توسط طبقات غیر شهری در نظر گرفته شده در مطالعه با موفقیت شناسایی نشدند، برای هر سه روش به کلاس شهری اختصاص داده شدند. پیچیدگی و تنوع اشیاء شهری همچنان یک چالش در تشخیص اشیاء شهری از دادههای ماهوارهای با وضوح بالا است. تعریف شکل طیفی برای یک طبقه شهری به دلیل ترکیب اطلاعات سایر طبقات غیر شهری معقول نیست. بنابراین، پیکسل هایی که توسط طبقات غیر شهری در نظر گرفته شده در مطالعه با موفقیت شناسایی نشدند، برای هر سه روش به کلاس شهری اختصاص داده شدند. پیچیدگی و تنوع اشیاء شهری همچنان یک چالش در تشخیص اشیاء شهری از دادههای ماهوارهای با وضوح بالا است.34 ، 35 ]. با وجود این، UA بهدستآمده از طبقهبندی مبتنی بر شکل طیفی نسبت به روشهای SVM و MD برای هر دو ناحیه A و B بالاتر است. PA کلاس شهری بهدستآمده از طبقهبندی مبتنی بر شکل طیفی با طبقهبندی بهدستآمده توسط MD برای یکسان است. منطقه A، در حالی که بهتر از آن توسط SVM برای هر دو منطقه A و B.
از نظر کارایی طبقهبندی، طبقهبندی مبتنی بر شکل طیفی حدود 9 دقیقه طول میکشد (پیکربندی رایانه: CPU 2.93 گیگاهرتز و حافظه نصب شده 4.00 گیگابایت) برای هر ناحیه یک بار اجرا شود. هر دو روش SVM و MD برای هر دو ناحیه کمتر از 1 دقیقه زمان می برند.
5. بحث
به عنوان تفاوت با رویکردهای طبقه بندی منتشر شده، این تحقیق تجزیه و تحلیل شکل را برای طبقه بندی داده های سنجش از دور برجسته می کند. تجزیه و تحلیل شکل می تواند تفاوت ظریف را بین طبقات مختلف پوشش زمین، که اغلب تشخیص آن با الگوریتم های مبتنی بر ویژگی های ارزش طیفی کل طیف، با تجزیه منحنی طیفی به تعدادی از بخش های متوالی، دشوار است، پیدا کند. در همین حال، جداول دوبعدی ارائه شده در این مطالعه نه تنها گرایش تغییرات طیفی (صعودی/نزولی)، بلکه ویژگیهای هر بخش (مانند موقعیت آغاز و پایان، مقدار میانگین) را نیز نشان میدهد. با انجام این کار، می توان از هر دو شکل طیفی و مقدار طیفی برای طبقه بندی داده های سنجش از دور استفاده کرد. با استفاده از روش مبتنی بر شکل طیفی، OA 0.834 برای منطقه A و 0 است.
در همین حال، برخی از اشکالات برای تحقیقات طبقهبندی مبتنی بر شکل طیفی نیز وجود دارد. دقت طبقهبندی میتواند تحتتاثیر محدودههای آستانه در قالبهای شناسایی قرار گیرد. محدوده متغیر مناسب تعیین شده توسط نمونه های آموزشی، پارامترهای حیاتی برای اجرای موفقیت آمیز طبقه بندی مبتنی بر شکل طیفی هستند. علاوه بر این، در مقایسه با سایر روشهای طبقهبندی، روش مبتنی بر شکل طیفی زمانبر است. دلایل را به دو جنبه زیر نسبت می دهند. یکی افزایش ابعاد داده به دلیل توصیف شکل منحنی با استفاده از جدول دو بعدی است. دیگری الگوریتم تطبیق چند سطحی است. بهینه سازی بیشتر الگوریتم تطبیق و یک جایگزین زبان کامپایل شده برای توسعه این روش باید زمان اجرا را کاهش دهد.
6. نتیجه گیری
شکل منحنی طیفی یک نوع پوشش سطحی معمولاً با سایر پوشش ها متفاوت است. اطلاعات شکل طیفی به دست آمده از داده های سنجش از راه دور می تواند برای تمایز اجسام سطح اعمال شود. با این حال، تعیین کمیت شکل طیفی، که منجر به فقدان دادههای شکل طیفی از بسیاری از ادبیات طبقهبندی سنجش از دور فعلی منتشر شده، آسان نیست. در این مقاله، یک روش طبقهبندی سنجش از دور که به طور کامل از شکل طیفی استفاده میکند با پارامترسازی شکل طیفی توسعه داده شد. ایده اصلی پارامترسازی در کدگذاری شکل منحنی طیفی است. به طور کلی، منحنی طیفی از مقادیر افراطی و چند شاخه (مانند شاخه صعودی، شاخه نزولی و شاخه صاف) تشکیل شده است. از این رو، فقط با استفاده از چند عدد می توان شکل منحنی طیفی شی را کدگذاری و پارامتر کرد. هنگامی که یک الگوریتم تطبیقی در دوره طبقهبندی شکل طیفی معرفی شد، نتایج طبقهبندی موفقیتآمیز با OAs 0.834 و 0.854 را برای دو ناحیه آزمایشی بهدست آوردیم. مقایسه با روشهای SVM و MD نشان داد که بهترین ضرایب OAs و Kappa با طبقهبندی مبتنی بر شکل طیفی به دست آمد. همچنین لازم به ذکر است که انگیزه اولیه این تحقیق ارائه نظریه طبقه بندی تصاویر با استفاده از شکل طیفی بوده و تنها نتایج اولیه در این مقاله ارائه شده است. مطالعات آینده ممکن است بر موضوعات زیر متمرکز شود: 854 برای دو ناحیه آزمایشی زمانی که یک الگوریتم تطبیق در دوره طبقه بندی شکل طیفی معرفی شد. مقایسه با روشهای SVM و MD نشان داد که بهترین ضرایب OAs و Kappa با طبقهبندی مبتنی بر شکل طیفی به دست آمد. همچنین لازم به ذکر است که انگیزه اولیه این تحقیق ارائه نظریه طبقه بندی تصاویر با استفاده از شکل طیفی بوده و تنها نتایج اولیه در این مقاله ارائه شده است. مطالعات آینده ممکن است بر موضوعات زیر متمرکز شود: 854 برای دو ناحیه آزمایشی زمانی که یک الگوریتم تطبیق در دوره طبقه بندی شکل طیفی معرفی شد. مقایسه با روشهای SVM و MD نشان داد که بهترین ضرایب OAs و Kappa با طبقهبندی مبتنی بر شکل طیفی به دست آمد. همچنین لازم به ذکر است که انگیزه اولیه این تحقیق ارائه نظریه طبقه بندی تصاویر با استفاده از شکل طیفی بوده و تنها نتایج اولیه در این مقاله ارائه شده است. مطالعات آینده ممکن است بر موضوعات زیر متمرکز شود: و تنها نتایج اولیه در این مقاله ارائه شد. مطالعات آینده ممکن است بر موضوعات زیر متمرکز شود: و تنها نتایج اولیه در این مقاله ارائه شد. مطالعات آینده ممکن است بر موضوعات زیر متمرکز شود:
(1) مفهوم شکل طیفی را می توان به خوبی در تصاویر فراطیفی نشان داد. بنابراین، روش ارائه شده از نظر عملی برای داده های فراطیفی معنادارتر خواهد بود.
(2) طراحی الگوهای شناسایی تا حدی ذهنی است و توسعه بیشتر این روش را محدود می کند. یک ضرورت برای مطالعه بیشتر، توسعه یک روش یادگیری ماشین فعال برای تعیین آستانه مناسب در الگوهای شناسایی است.
منابع
- Colditz، RR; لوپز سالدانا، جی. مائده، پ. اسپینوزا، جی. Tovar، CM; هرناندز، AV; بنیتز، CZ; کروز لوپز، آی. Ressl, R. تولید و تجزیه و تحلیل نقشه پوشش زمین در سال 2005 برای مکزیک با استفاده از داده های MODIS 250 متری. سنسور از راه دور محیط. 2012 ، 123 ، 541-552. [ Google Scholar ] [ CrossRef ]
- فریدل، MA; McIver، DK; هاجز، JCF; ژانگ، XY; موچونی، دی. استراهلر، ق. Woodcocka، CE; گوپال، اس. اشنایدر، آ. کوپر، ا. و همکاران نقشه برداری جهانی پوشش زمین از الگوریتم های MODIS و نتایج اولیه سنسور از راه دور محیط. 2002 ، 83 ، 287-302. [ Google Scholar ] [ CrossRef ]
- آمارسایخان، د. داگلاس، تی. ترکیب داده ها و طبقه بندی تصاویر چند منبعی. بین المللی J. Remote Sens. 2004 , 25 , 3529-3539. [ Google Scholar ] [ CrossRef ]
- باراندلا، آر. خوارز، ام. طبقه بندی تحت نظارت داده های سنجش از دور با قابلیت یادگیری مداوم. بین المللی J. Remote Sens. 2002 , 23 , 4965-4970. [ Google Scholar ] [ CrossRef ]
- بلژیک، م. Drǎguţ، L. مقایسه رویکردهای تقسیم بندی چند تفکیک پذیر نظارت شده و بدون نظارت برای استخراج ساختمان ها از تصاویر با وضوح بسیار بالا. ISPRS J. Photogramm. Remote Sens. 2014 ، 96 ، 67-75. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Kavzoglu, T. افزایش دقت طبقه بندی شبکه عصبی با استفاده از داده های آموزشی تصفیه شده. محیط زیست مدل نرم افزار 2009 ، 24 ، 850-858. [ Google Scholar ] [ CrossRef ]
- خو، ال. لی، جی. برنینگ، A. مطالعه مقایسه ای تکنیک های طبقه بندی مختلف برای شناسایی نشت نفت دریایی با استفاده از تصاویر RADARSAT-1. سنسور از راه دور محیط. 2014 ، 141 ، 14-23. [ Google Scholar ] [ CrossRef ]
- کارائو، اچ. گونسالوز، پی. Caetano، M. سهم اطلاعات چندطیفی و چند زمانی از تصاویر MODIS در طبقه بندی پوشش زمین. سنسور از راه دور محیط. 2008 ، 112 ، 986-997. [ Google Scholar ] [ CrossRef ]
- فودی، جنرال موتورز; Mathur, A. استفاده از مجموعههای آموزشی کوچک حاوی پیکسلهای مخلوط برای طبقهبندی دقیق تصویر سخت: آموزش پاسخهای طیفی مخلوط برای طبقهبندی توسط SVM. سنسور از راه دور محیط. 2006 ، 103 ، 179-189. [ Google Scholar ] [ CrossRef ]
- هانسن، ام سی; DeFries، RS; تاونشند، جی آر. Sohlberg، R. طبقه بندی پوشش زمین جهانی در تفکیک مکانی 1 کیلومتر با استفاده از رویکرد درخت طبقه بندی. بین المللی J. Remote Sens. 2000 ، 21 ، 1331-1364. [ Google Scholar ] [ CrossRef ]
- خو، ام. واتاناچاتوراپورن، پ. ورشنی، پ. Arora، M. رگرسیون درخت تصمیم برای طبقه بندی نرم داده های سنجش از دور. سنسور از راه دور محیط. 2005 ، 97 ، 322-336. [ Google Scholar ] [ CrossRef ]
- Blaschke, T. تجزیه و تحلیل تصویر مبتنی بر شی برای سنجش از راه دور. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 2-16. [ Google Scholar ] [ CrossRef ]
- نامدار، م. آداموفسکی، جی. سعادت، ح. شریفی، ف. خیری، ع. طبقهبندی کاربری و پوشش اراضی در مناطق نیمه خشک با استفاده از تحلیل مؤلفههای مستقل (ICA) و طبقهبندی کارشناسی. بین المللی J. Remote Sens. 2014 ، 35 ، 8057-8073. [ Google Scholar ] [ CrossRef ]
- لی، کیو. وانگ، سی. ژانگ، بی. Lu, L. طبقه بندی محصولات مبتنی بر شی با داده های سری زمانی پیشرفته Landsat-MODIS. Remote Sens. 2015 ، 7 ، 16091–16107. [ Google Scholar ] [ CrossRef ]
- پادما، اس. Sanjeevi، S. Jeffries Matusita مبتنی بر اندازه گیری ترکیبی برای تطابق طیفی بهبود یافته در تجزیه و تحلیل تصویر فراطیفی. بین المللی J. Appl. زمین Obs. Geoinf. 2014 ، 32 ، 138-151. [ Google Scholar ] [ CrossRef ]
- هو، کیو. وو، دبلیو. شیا، تی. یو، کیو. یانگ، پی. لی، ز. Song, Q. کاوش در استفاده از تصاویر Google Earth و روش های مبتنی بر شی در نقشه برداری کاربری زمین/پوشش. Remote Sens. 2013 , 5 , 6026–6042. [ Google Scholar ] [ CrossRef ]
- پنیا-باراگان، جی.ام. Ngugi، MK; کارخانه، RE; شش، J. شناسایی محصول مبتنی بر شی با استفاده از شاخصهای چندگانه پوشش گیاهی، ویژگیهای بافتی و فنولوژی محصول. سنسور از راه دور محیط. 2011 ، 115 ، 1301-1316. [ Google Scholar ] [ CrossRef ]
- سان، سی. وو، Z.-F. Lv، Z.-Q.; یائو، ن. وی، جی.-بی. کمی سازی انواع مختلف رشد شهری و پویایی تغییر در گوانگژو با استفاده از داده های سنجش از دور چند زمانی بین المللی J. Appl. زمین Obs. Geoinf. 2013 ، 21 ، 409-417. [ Google Scholar ] [ CrossRef ]
- وربسلت، ج. زیلیس، ع. هرولد، ام. تشخیص اغتشاش در زمان واقعی با استفاده از سری های زمانی تصویر ماهواره ای. سنسور از راه دور محیط. 2012 ، 123 ، 98-108. [ Google Scholar ] [ CrossRef ]
- واردلو، بی. اگبرت، اس. Kastens, J. تجزیه و تحلیل داده های شاخص پوشش گیاهی سری زمانی MODIS 250 متر برای طبقه بندی محصولات در دشت های بزرگ مرکزی ایالات متحده. سنسور از راه دور محیط. 2007 ، 108 ، 290-310. [ Google Scholar ] [ CrossRef ]
- دنیسون، PE; رابرتز، دی. پترسون، SH الگوریتمهای ترکیب زمانی مبتنی بر شکل طیفی برای دادههای بازتاب سطحی MODIS. سنسور از راه دور محیط. 2007 ، 109 ، 510-522. [ Google Scholar ] [ CrossRef ]
- شانموگام، س. SrinivasaPerumal، P. رویکردهای تطبیق طیفی در پردازش تصویر ابرطیفی. بین المللی J. Remote Sens. 2014 , 35 , 8217–8251. [ Google Scholar ] [ CrossRef ]
- لی، جی. نارایانان، RM یک رویکرد مبتنی بر شکل برای تغییر تشخیص دریاچه ها با استفاده از تصاویر سنجش از دور سری زمانی. IEEE Trans. Geosci. Remote 2003 , 41 , 2466-2477. [ Google Scholar ]
- دوپه، F.-X. Luc, B. پوشش درخت در چارچوب هسته گراف برای طبقه بندی شکل. ICIAP 2009 ، 278-287. [ Google Scholar ]
- لین، پی. Xu, J. توصیف و روش تشخیص پیکربندی منحنی و کاربرد آن. J. دانشگاه جنوب چین تکنولوژی (Nat. Sci. Ed.) 2009 ، 37 ، 77-81. [ Google Scholar ]
- کیانی، W. طبقهبندی مبتنی بر شکل و پیشبینی عملکردی پروفایلهای جریان ترافیک. دکتری پایان نامه، دانشگاه علم و صنعت میسوری، رولا، MO، ایالات متحده آمریکا، 2015. [ Google Scholar ]
- اویاما، ی. ماتسوشیتا، بی. فوکوشیما، تی. تشخیص شکوفههای سیانوباکتری سطحی و ماکروفیتهای آبزی با استفاده از نوارهای مادون قرمز امواج کوتاه Landsat/TM و ETM+. سنسور از راه دور محیط. 2015 ، 157 ، 35-47. [ Google Scholar ] [ CrossRef ]
- خطوط، ج. دیویس، ال.ام. هیلز، جی. Bagnall، A. تبدیل شکل برای طبقه بندی سری های زمانی. در مجموعه مقالات هجدهمین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی، پکن، چین، 12 تا 16 اوت 2012.
- Mehtre، BM; کنکانحلی، ام اس; لی، اندازهگیری شکل WF برای بازیابی تصویر مبتنی بر محتوا: مقایسه Inf. روند. مدیریت 1997 ، 33 ، 319-337. [ Google Scholar ] [ CrossRef ]
- کامبر، ا. فیشر، پی. براندون، سی. Khmag، A. تجزیه و تحلیل فضایی دقت طبقه بندی تصاویر سنجش از دور. سنسور از راه دور محیط. 2012 ، 127 ، 237-246. [ Google Scholar ] [ CrossRef ]
- لو، دی. Weng, Q. بررسی روش ها و تکنیک های طبقه بندی تصویر برای بهبود عملکرد طبقه بندی. بین المللی J. Remote Sens. 2007 , 28 , 823-870. [ Google Scholar ] [ CrossRef ]
- دنهام، آر. منگرسن، ک. تحلیل ویت، سی بیزی دادههای دقت نقشه موضوعی. سنسور از راه دور محیط. 2009 ، 113 ، 371-379. [ Google Scholar ] [ CrossRef ]
- آرسیدیاکونو، سی. پورتو، SMC؛ Cascone, G. دقت نقشههای موضوعی crop-shelter: مطالعه موردی نقشههای بهدستآمده از طبقهبندی طیفی و بافتی تصاویر ماهوارهای با وضوح بالا. J. Food Agric. محیط زیست 2012 ، 10 ، 1071-1074. [ Google Scholar ]
- مومنی، ر. آپلین، پ. بوید، دی. نقشه برداری پوشش زمین شهری پیچیده از تصاویر فضابردی: تأثیر وضوح فضایی، مجموعه باند طیفی و رویکرد طبقه بندی. Remote Sens. 2016 , 8 , 88. [ Google Scholar ] [ CrossRef ]
- Erener، A. روش طبقه بندی، تنوع طیفی، ترکیب باند و ارزیابی دقت ارزیابی برای تشخیص ویژگی شهری. بین المللی J. Appl. زمین Obs. Geoinf. 2013 ، 21 ، 397-408. [ Google Scholar ] [ CrossRef ]
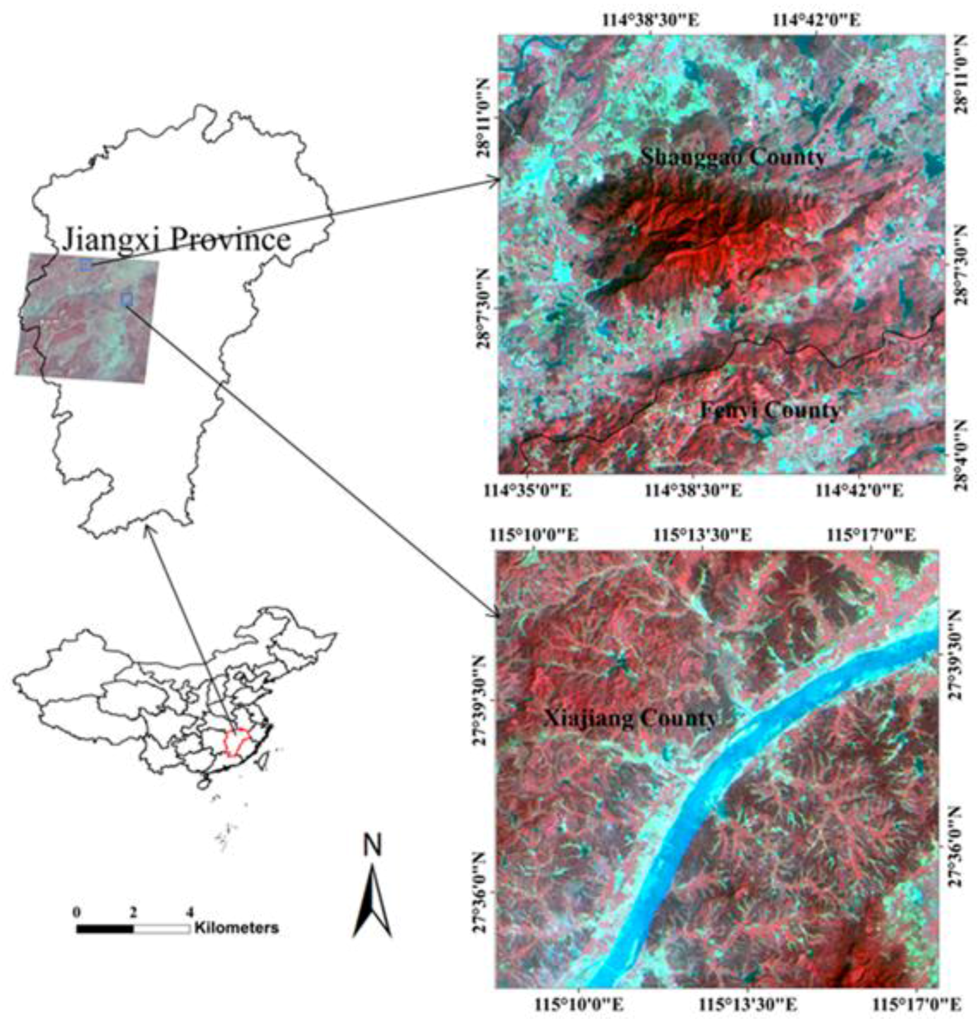
شکل 1. موقعیت جغرافیایی منطقه مورد مطالعه. دو تصویر زیر مجموعه ( بالا ): ناحیه A و ( پایین ): ناحیه B با رنگ کاذب (R: باند 4، G: باند 3، و B: باند 2) برای انجام طبقهبندی تصویر مبتنی بر شکل طیفی استفاده شد.
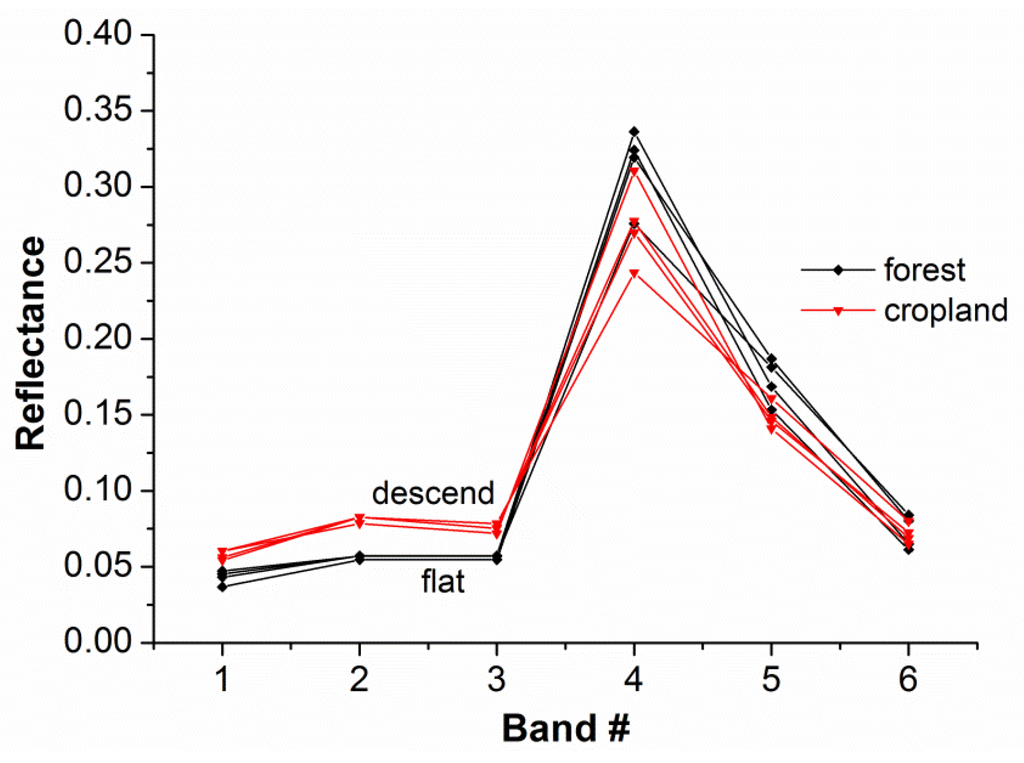
شکل 2. منحنی های طیفی کلاس های زمین زراعی (خط قرمز) و جنگل (خط سیاه)، از داده های سنجش از دور.
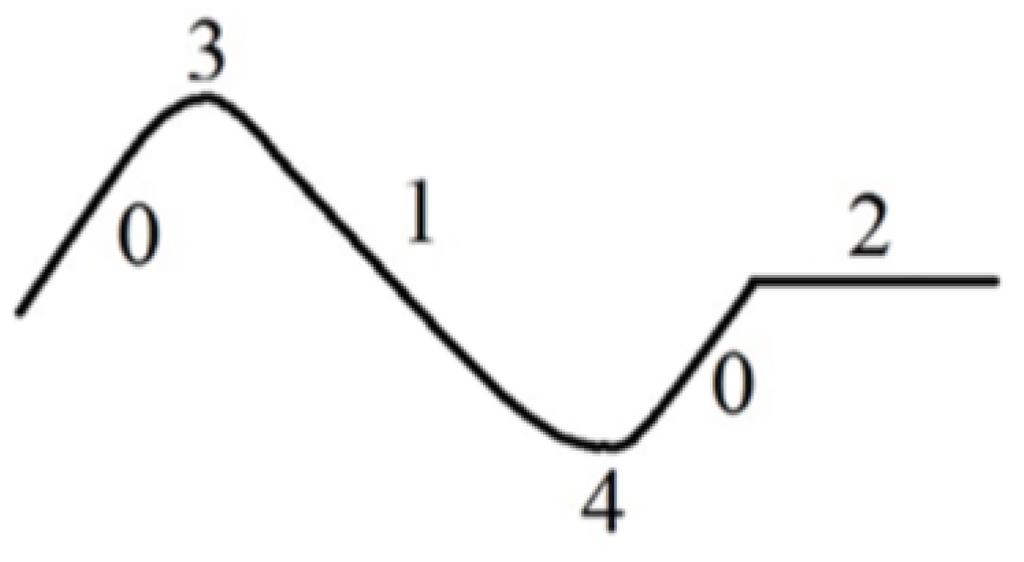
شکل 3. نمادسازی یک منحنی طیفی. (قطعه صعودی: 0، قطعه نزولی: 1، قطعه مسطح: 2، و قله و دره منحنی طیفی: به ترتیب 3 و 4).
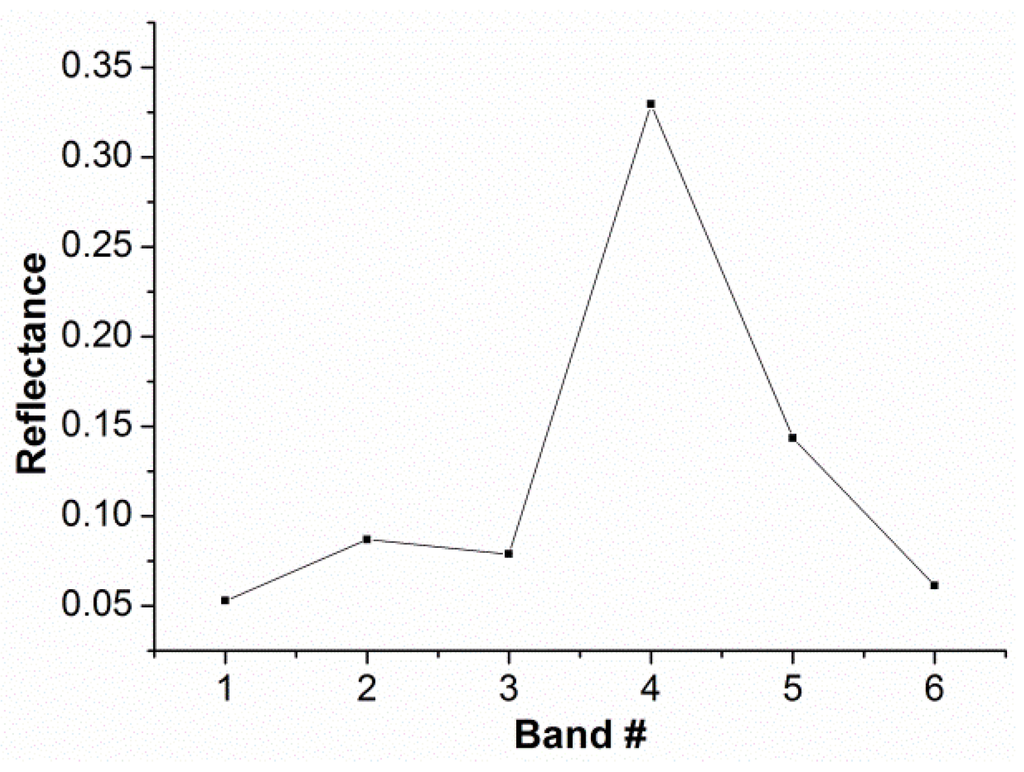
شکل 4. یک منحنی طیفی از داده های سنجش از دور.

شکل 5. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 3 .
شکل 6. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 4 .

شکل 7. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 5 .

شکل 8. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 6 .
شکل 9. منحنی های طیفی جمع آوری  شده از نمونه های مورد استفاده برای تعیین جدول 7 .
شده از نمونه های مورد استفاده برای تعیین جدول 7 .
 شده از نمونه های مورد استفاده برای تعیین جدول 7 .
شده از نمونه های مورد استفاده برای تعیین جدول 7 .
شکل 10. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 8 .
شکل 11. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 9 .
شکل 12. منحنی های طیفی جمع آوری شده از نمونه های مورد استفاده برای تعیین جدول 10 .
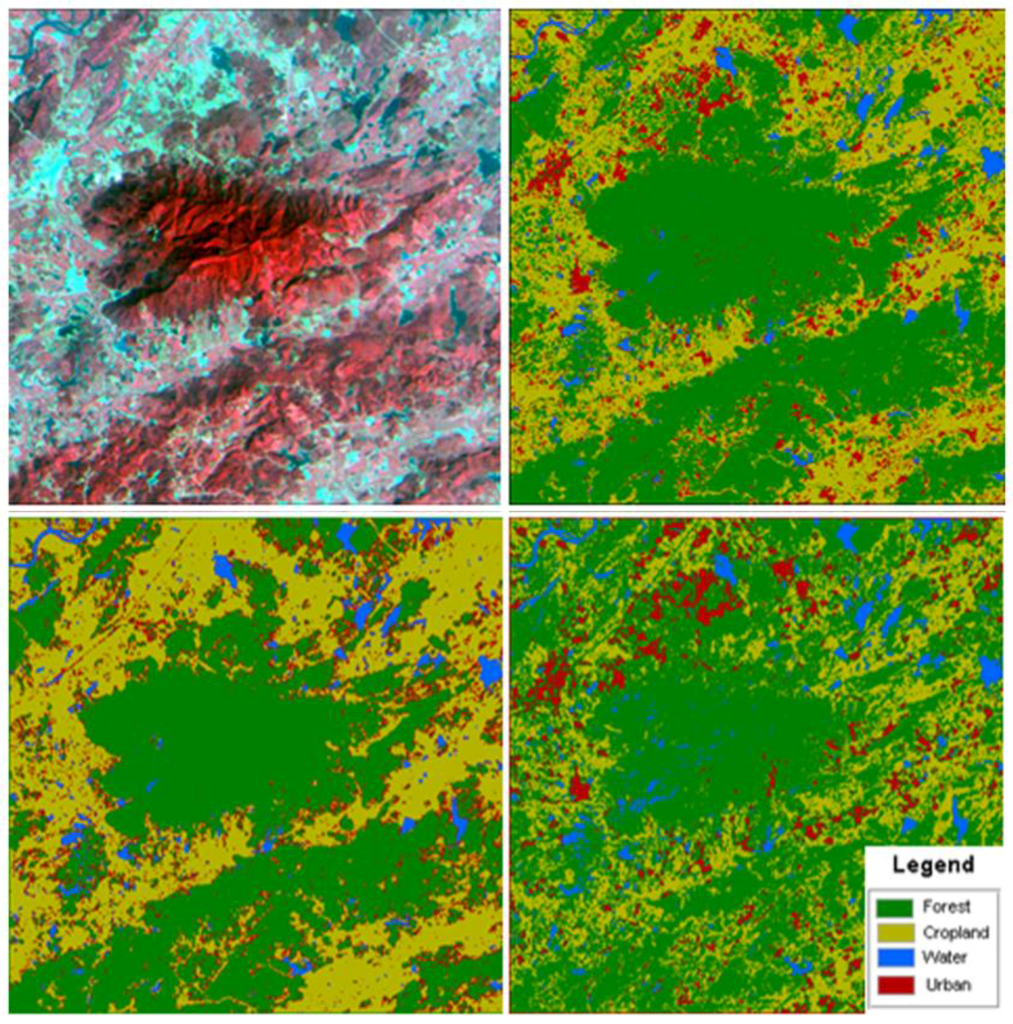
شکل 13. تصویر زیر مجموعه برای ناحیه A با رنگ کاذب (( بالا سمت چپ ) R: باند 4، G: باند 3، B: باند 2) و تصویر طبقه بندی شده با استفاده از روش ( بالا سمت راست ) مبتنی بر شکل طیفی، ( چپ پایین) . ) روش SVM و ( پایین سمت راست ) روش MD.
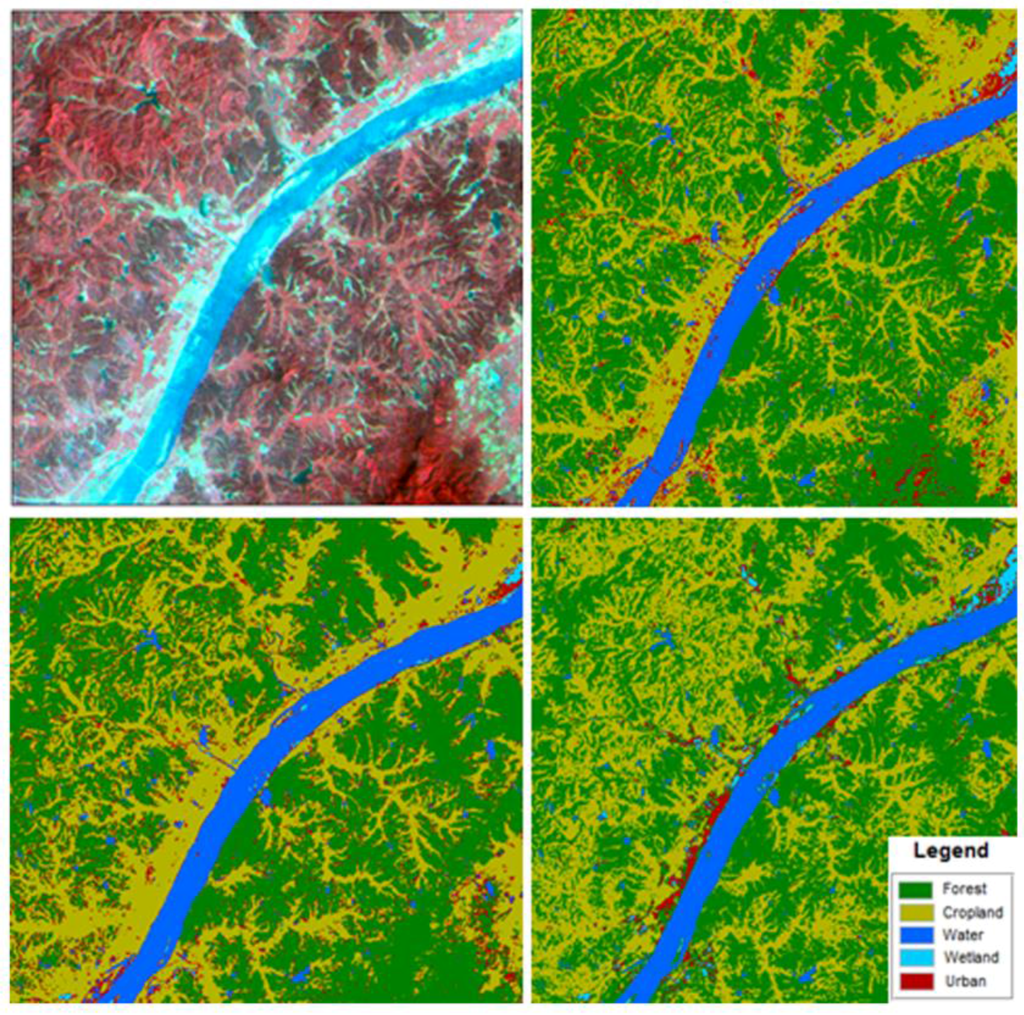
شکل 14. تصویر زیر مجموعه برای ناحیه B با رنگ کاذب (( بالا سمت چپ ) R: باند 4، G: باند 3، B: باند 2) و تصویر طبقه بندی شده با استفاده از روش ( بالا سمت راست ) مبتنی بر شکل طیفی، ( چپ پایین) . ) روش SVM و ( پایین سمت راست ) روش MD.

جدول 1. معیارهای تعیین تکواژها در یک منحنی طیفی.
جدول 2. جدول 2 بعدی مربوط به منحنی در شکل 4 .
جدول 3. الگوی شناسایی 1 برای کلاس زمین زراعی.
جدول 4. الگوی شناسایی 2 برای کلاس زمین زراعی.
جدول 5. الگوی شناسایی 1 برای کلاس جنگل.
جدول 6. الگوی شناسایی 2 برای کلاس جنگل.
جدول 7. الگوی شناسایی 3 برای کلاس جنگل.
جدول 8. الگوی شناسایی 1 برای کلاس آب.
جدول 9. الگوی شناسایی 2 برای کلاس آب.
جدول 10. الگوی شناسایی 3 برای کلاس آب.
جدول 11. ماتریس خطا بین تصاویر طبقه بندی شده و Google Earth برای منطقه A.
جدول 12. ماتریس خطا بین تصاویر طبقه بندی شده و Google Earth برای منطقه B.
جدول 13. مقایسه اندازه گیری دقت برای مناطق A و B.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر