

خلاصه
به طور متعارف، رویکردهای مدلسازی مبتنی بر عامل از یک مدل مفهومی شروع میشوند که درک نظری سیستمهای مورد علاقه را در بر میگیرد. نتایج شبیهسازی سپس «در پایان» برای اعتبار بخشیدن به درک مفهومی استفاده میشوند. در عصر غنی از داده های امروزی، پیشنهاداتی وجود دارد که مدل ها باید مبتنی بر داده باشند. گردش کار داده محور در مدل های ریاضی رایج است. با این حال، کاربرد آنها برای مدلهای مبتنی بر عامل هنوز در مراحل اولیه است. ادغام دادههای حسگر بیدرنگ در جریانهای کاری مدلسازی، امکان مقایسه شبیهسازیها با دادههای واقعی را در طول اجرای مدل باز میکند. روش های کالیبراسیون و اعتبار سنجی به فرآیندهای خودکار تبدیل می شوند که به طور مکرر در طول شبیه سازی اجرا می شوند. ما فرض میکنیم که ترکیب دادههای حسگر زمان واقعی در مدلهای مبتنی بر عامل، توانایی پیشبینی چنین مدلهایی را بهبود میبخشد. به ویژه، که چنین ادغامی منجر به پارامترهای مدل و مجموعه قوانین به طور فزاینده ای می شود. در این مقاله، ما این سوال را با اجرای یک مدل گله که در زمان واقعی تکامل مییابد بررسی میکنیم. به طور خاص، ما از رویکرد الگوریتم ژنتیک برای شبیهسازی پارامترهای نماینده برای توصیف مسیرهای پرواز کبوترهای خانگی استفاده میکنیم. پارامترهای ناوبری کبوترها شبیه سازی شده و به صورت پویا در برابر جریان داده های حسگر GPS شبیه سازی شده ارزیابی شده و بر اساس تناسب پارامترهای کاندید بهینه شده است. در نتیجه، مدل قادر به شبیه سازی دقیق زوایای چرخش نسبی و فاصله گامی کبوتران خانگی بود. علاوه بر این، پارامترهای بهینه شده می توانند حلقه ها را تکرار کنند، که الگوهای رایج در مسیرهای پرواز کبوترهای خانگی هستند. در نهایت، استفاده از الگوریتمهای ژنتیک در این مطالعه امکان بهینهسازی و تحلیل حساسیت مبتنی بر دادهها را به طور همزمان فراهم کرد.
کلید واژه ها:
مجموعه قوانین تطبیقی الگوریتم ژنتیک ; سنسورها ؛ مدل سازی مبتنی بر عامل ; بهينه سازي
1. معرفی
به طور سنتی، مدلهای مبتنی بر عامل (ABM) از یک فرضیه (یا قوانین رفتار) سیستمهای مورد علاقه فرموله میشوند [ 1 ]. داده های تجربی در مراحل بعدی برای تسهیل کالیبراسیون و اعتبارسنجی مدل در یک فرآیند تکراری اکتشاف معرفی می شوند [ 2 ]. نتیجه مجموعه ای از متغیرهای حالت است که نمایشی واقعی از فرآیندها و مکانیسم های رفتاری سیستم زیربنایی ایجاد می کند و بنابراین می تواند برای بررسی اعتبار مکانیسم فرضی سیستم مورد استفاده قرار گیرد. یک مانع برای استفاده از ABM در بررسی سیستم های مکانی-زمانی فقدان داده های در مقیاس خوب بوده است. 3]] برای توصیف رفتار عوامل فردی و استفاده برای کالیبراسیون، تأیید، و اعتبارسنجی چنین مدلهایی. پیشرفتهای اخیر در جمعآوری و انتقال دادهها، بهویژه به دلیل ظهور فناوریهای حسگر، فرصتی را برای ادغام دادههای غنی ناشی از چنین پلتفرمهایی در محیطهای مدلسازی و شبیهسازی ارائه میدهد [4 ] .
ظهور حسگرهای کوچک و شبکههای حسگر هوشمند [ 5 ] فرصتی را برای استقرار حسگرها در محیطهای دور و استفاده از جریانهای داده حسگر حاصل برای ثبت ویژگیهای محلی پویا از محرکهای فردی فرآیندهای جغرافیایی فراهم میکند. از این داده ها می توان برای نظارت، بررسی و درک تأثیر چنین رفتارهای فردی بر نتایج کلی سطح سیستم استفاده کرد. علاوه بر این، شبکههای حسگر بیسیم میتوانند انتقال شفاف و کارآمد منابع حسگر را تسهیل کنند، از این رو زمان چرخش بین جمعآوری و تجزیه و تحلیل دادهها و تجسم نتایج را کاهش میدهند. توانایی حسگرها، به ویژه آنهایی که تحت “نژاد” شبکه های حسگر بی سیم (WSN) مستقر شده اند [ 6]]، برای گرفتن پویا ویژگیهای مکانی-زمانی سیستمهای در دست و انتقال اطلاعات در زمان واقعی، این سوال را در مورد مناسب بودن روشهای سنتی در مشخصات مدل [7] و تحلیل جغرافیایی مطرح میکند. یک پیشنهاد برای استفاده کارآمد از منابع حسگر، تغییر از برنامه های کاربردی مبتنی بر دسکتاپ متمرکز به سمت خدمات جغرافیایی مبتنی بر وب توزیع شده است [ 5 ، 6 ]. این منجر به علاقه و تحقیقات گسترده با هدف توسعه استانداردهای باز برای تسهیل ابزار استاندارد پیاده سازی، مستندسازی، کشف و دسترسی به خدمات حسگر گرا شده است [ 7 ، 8] .]. در نتیجه، شبکههای حسگر در حوزههای مختلف، از جمله محیطی [ 4 ، 9 ، 10 ]، بهداشت عمومی [ 11 ، 12 ]، هیدرولوژی [ 13 ] و تحرک [ 14 ] استفاده شدهاند. در همین زمینه، دانشمندان در زمینه اکولوژی حرکت حیوانات، مخازن داده های حرکت حیوانات آنلاین استاندارد شده مانند Movebank [ 15 ، 16 ]، پایگاه داده بی سیم نظارت بر حیوانات از راه دور (WRAM) [ 17 ]، و سیستم اطلاعاتی برای تجزیه و تحلیل و مدیریت توسعه داده اند. داده های ونگولات (ISAMUD) [ 18 ] در میان دیگران [ 19]. در نتیجه، مشاهدات حسگر به بخشی جدایی ناپذیر از تحقیقات در مورد رفتارهای حرکتی تبدیل شده است [ 14 ، 20 ، 21 ].
این موفقیتهای اولیه در پیادهسازی حسگرها و فناوریهای مدیریت داده مرتبط، منجر به علاقهمندی به ترکیب پویا دادهها در مدلهای شبیهسازی شده است. برجستهترین تلاش برای جذب دینامیکی دادههای حسگر در مدلهای شبیهسازی از طریق چارچوب شبیهسازی کاربردی داده محور پویا (DDDAS) [ 22 ، 23 ، 24 ، 25 ، 26 ] انجام شد. اجرای روشهای DDDAS در محیط مدلسازی مبتنی بر عامل توسط [ 27] مورد بررسی قرار گرفت] که یک ارتباط دو طرفه بین یک سیستم دوربین و مدلی از حرکات حیوانات را اجرا کرد. در تلاشی برای رسیدگی به چالشهای مربوط به مدیریت دادهها و تجسم پویا از نتایج ABMهای مبتنی بر دادههای پویا، شبیهسازی موازی در چارچوب سیستم شبیهسازی و تجزیه و تحلیل مبتنی بر دادههای دینامیکی توزیع شده (4D-SAS) پیشنهاد شده است [28 ] . . علاوه بر این، شواهدی وجود دارد که نشان میدهد الگوهای رفتاری عاملها که توسط مشاهدات حسگر گرفته میشوند، میتوانند جذب دادهها را در مدلهای شبیهسازی مبتنی بر دادههای دینامیکی تسهیل و بهبود بخشند [ 29 ]. در حالی که همسان سازی داده های پویا تا حد زیادی در مدل های ریاضی موفقیت آمیز بوده است [ 30 ، 31 ]، تنها تلاش های محدودی برای پیاده سازی ABM های مبتنی بر داده وجود داشته است [30، 31].32]. در یک مطالعه مرتبط، جریانهای دادههای حسگر شبیهسازیشده در چارچوب مدل-حسگر برای ارزیابی تصمیمهای عامل در برابر دادههای «حسگر» در طول اجرای مدل استفاده شد [ 33 ]. یک جنبه برجسته تحقیقاتی که هنوز به طور قطعی مورد بررسی قرار نگرفته است، این است که چگونه داده های پویا می توانند برای بهبود مشخصات رفتار عامل ها در ABM های مبتنی بر قانون و فضایی صریح استفاده شوند.
برای بهبود پویا رفتار مکانی و زمانی عوامل، مهم است که در نظر بگیریم که چگونه چنین عواملی با تغییرات در ویژگیهای محیط خود سازگار میشوند. انطباق یک ویژگی مهم ABM ها است و بر توانایی عامل ها برای درک محیط خود، یادگیری در مورد اقدامات ممکن در شرایط مختلف و پاسخ به محرک های عوامل دیگر یا محیط آنها متکی است [34 ] . یادگیری در ABM ها از طریق روش های یادگیری تقویتی [ 35 ]، الگوریتم های تکاملی (ژنتیک) [ 36 ، 37 ] و یادگیری ماشینی [ 38 ] به دست آمده است . یادگیری فضایی به ویژه پیشروی برای سازگاری موفق است [ 39 ، 40[ 35 ] و به عنوان یکی از چالشهای بازنمایی عاملهای آگاه فضایی شناسایی شده است . یادگیری تقویتی به ویژه در مواردی که محیط در حالت های ساده، گسسته و قطعی نشان داده می شود مفید است [ 41 ]. یادگیری ماشین در مدل های مبتنی بر عامل برای داده کاوی برای تشخیص الگوها در داده ها استفاده شده است [ 42 ]. الگوریتمهای ژنتیک برای ABMهایی که یادگیری و سازگاری ویژگیهای جداییناپذیر عوامل در سیستم مورد نظر هستند، مناسبتر هستند. علاوه بر این، الگوریتمهای ژنتیک به عنوان الگوریتمهای ابتکاری مناسب برای جنبههای مختلف طراحی ABM از جمله: جستجوی پارامتر هدایت شده [ 43 ]، کالیبراسیون [ 44]، بهینه سازی پارامتر، و تجزیه و تحلیل حساسیت [ 45].
از نظر مفهومی، الگوریتمهای ژنتیک تکنیکهای مبتنی بر رایانه هستند که از قوانین انتخاب طبیعی برای حل مسائل دشوار بهینهسازی وام میگیرند [ 37 ]. مفاهیم اساسی الگوریتم های ژنتیک و چارچوب آنها برای سازگاری در ابتدا توسط جان هالند در دهه 1960 تعریف شد [ 46 ، 47 ]. همانطور که در انتخاب طبیعی، راه حل های نامزد برای یک مشکل به عنوان “کروموزوم” کدگذاری می شوند [ 48 ]. سپس الگوریتمها جمعیت راهحلهای نامزد را با استفاده از ابزارهای انتخاب طبیعی به مسائل گسسته تبدیل میکنند [ 38 ]. در سادهترین شکل، تکامل با اعمال سه عامل ژنتیکی انتخاب، جهش و متقاطع (بازترکیب) به دست میآید [ 48 ، 49]]. اپراتورهای انتخاب از معیار تناسب برای انتخاب مجموعه ای از کروموزوم ها در یک جمعیت به عنوان کاندیدای تولید مثل استفاده می کنند. انتخاب یک تابع تناسب واقعی برای اندازهگیری اینکه کروموزومهای کاندید چگونه رفتارهای مشهود در دنیای واقعی را شبیهسازی میکنند، همچنان یک چالش برجسته در پیادهسازی الگوریتمهای ژنتیک است [ 50] .]. از سوی دیگر، عملگرهای جهش، به طور تصادفی یک ژن/منبع درون کروموزوم را تغییر می دهند یا تغییر می دهند و می توانند تأثیر منفی یا مثبت بر عملکرد فرزندان حاصل داشته باشند. اپراتورهای متقاطع یا نوترکیب بخش هایی از کروموزوم های کاندید را از والدین درگیر در تولید مثل به منظور ایجاد مجموعه های جدیدی از کروموزوم های فرزندان مبادله می کنند. جدا از سه عملگر اصلی انتخاب، جهش و متقاطع، یک عملگر جایگزین مکانیسم تکامل نسل ها را در یک جمعیت مشخص می کند. در الگوریتم ژنتیک نسلی، تمام راهحلهای والدین در پایان هر نسل جایگزین میشوند، در حالی که در الگوریتمهای حالت پایدار/همپوشانی، تنها درصدی (که معمولاً کمتر از 100٪ است) در هر نسل حذف میشوند و با فرزندان پرورش یافته جایگزین میشوند. در حین تولید مثل [37 ]. الگوریتمهای ژنتیک برای مدلهای مبتنی بر عامل سیستمهای صریح فضایی به کار گرفته شدهاند که بیشتر نمونهها در حوزه بومشناسی هستند [ 36 ، 51 ، 52 ]. در موارد مستند، کاربرد آنها در بهینه سازی یا تنظیم پارامترهای مدل [ 50 ، 53 ] و شناسایی رفتارهای مورد علاقه از فضای پارامتر [ 43 ] بوده است. با این حال، این سوال باقی میماند که چگونه میتوان مشاهدات حسگر ریز و روشهای تکاملی را برای بهبود مشخصات، کالیبراسیون و اعتبارسنجی ABM در یک رویکرد مبتنی بر دادهها ترکیب کرد.
در این مقاله، ما فرض میکنیم که ادغام دینامیکی دادههای حسگر در ABMهای صریح فضایی، مشخصات چنین مدلهایی را بهبود میبخشد. علاوه بر این، ما معتقدیم که استفاده از دادههای حسگر برای ارزیابی پویا و بهینهسازی پارامترهای مدل، توانایی پیشبینی مدلها را بهبود میبخشد. به طور خاص، مشاهدات حسگر در مورد رفتار فضایی سطح محلی عوامل برای درک ناهمگونی مکانی-زمانی پدیدهها و فرآیندهای مختلف حیاتی است. ما استدلال میکنیم که ترکیبی از جریانهای دادههای حسگر پویا و الگوریتمهای تکاملی میتواند مؤلفههای لازم را برای مشخصات مدل، تأیید، و کالیبراسیون خودکار فراهم کند. بنابراین ما از مسیرهای سیستم موقعیت یاب جهانی (GPS) از کبوترها از یک آزمایش واقعی برای شبیهسازی جریانهای دادههای حسگر پویا استفاده کردیم. جریانهای دادههای حسگر پویا به یک ABM وارد شدند که برای ارزیابی پویا تصمیمهای ناوبری کبوتران شبیهسازی شده در حال پرواز استفاده میشود. علاوه بر این، ما از الگوریتم های ژنتیک برای تکامل پارامترهای ناوبری و گله کبوتران خانگی استفاده کردیم. هدف از این کار شناسایی محدوده بهینه پارامترهایی بود که میتوان از آنها برای بازتولید مسیرهای ناوبری واقعی عوامل کبوتر از محل رهاسازی تا انبار خانگی استفاده کرد.
کار مرتبط
ABMهای مبتنی بر داده که مربوط به موردی است که در اینجا ارائه می کنیم، موضوع بررسی تعدادی از محققین بوده است. اندازه گیری های بلادرنگ به صورت پویا به مدل های شبیه سازی آتش تزریق شده اند تا مشخصات چنین مدل هایی را بهبود بخشند [ 23 ، 54 ، 55 ]. در همین راستا، الگوریتم های ژنتیک مبتنی بر داده های دینامیکی برای تنظیم خودکار مقادیر ورودی شبیه سازهای آتش به منظور بهره گیری از رفتار واقعی آتش استفاده شده است [ 56 ]. مطالعات دیگر از داده های بلادرنگ برای تقویت مدل های شبیه سازی جمعیت استفاده کرده اند [ 57 ]. به طور خاص، مدلهای تشخیص رفتار برای تسهیل شبیهسازی دادهها در ABMهای محیطهای هوشمند استفاده شده است [ 29]]. تلاش برای بهبود مدیریت و تجسم نتایج مدلهایی که بر دادههای مکانی پویا تکیه میکنند نیز قابل توجه است [ 28 ]. در محیط زیست حرکت حیوانات، ناوبری و رفتار دسته جمعی کبوترها بر تصمیمات مسیریابی کبوترها در پروازهای خانگی خود حاکم است [ 58 ]. علاوه بر این، آزمایشهای GPS نشان داده است که کبوترها از مسیرهای انحرافی ناشی از توپوگرافی و نقشههای ناوبری شناختی برای یافتن اهداف خود استفاده میکنند [ 59 ].
این مقاله به شرح زیر سازماندهی شده است: انواع داده هایی که برای طراحی مدل استفاده کردیم و جزئیات پارامترها، رویه ها و مدل های فرعی همانطور که در مدل مشخص شده است در بخش 2 ارائه شده است . نتایج حاصل از مشخصات مدل و نتایج تجزیه و تحلیل داده ها در بخش 3 ارائه شده است . در بخش 4 ، بحثی درباره نتایج ارائه میکنیم و به طور خلاصه آنچه را که به عنوان مرز بعدی برای ادغام دادههای حسگر پویا در مدلهای مبتنی بر عامل در نظر میگیریم، تشریح میکنیم. در بخش پایانی، ما یک نتیجهگیری برای خلاصه کردن دستاوردها، چالشها و جهتگیریهای تحقیقاتی آتی ارائه میکنیم که میتواند بر اساس این مطالعه باشد.
2. مواد و روشها
2.1. داده ها
آهنگهای GPS حاوی جزئیات پرواز کبوترهای خانگی ( Columba livia ) مجموعه داده اصلی را در این مطالعه ارائه کردند. داده ها از یک تحقیق تجربی در مورد رهبری در بین کبوترهای اهلی در Seuzach، سوئیس [ 60 ، 61 ] به دست آمد. ما به دادههای Movebank دسترسی پیدا کردیم، که یک پلتفرم آنلاین برای گزارش و اشتراکگذاری دادههای ردیابی حیوانات است ( www.movebank.org ) [ 15 ، 16]]. به طور خاص، داده ها حاوی اطلاعاتی در مورد پنج پرواز خانگی جداگانه بود. در هر پرواز، ردپای گلهای که حداقل هفت کبوتر را شامل میشد، ضبط میشد. مختصات GPS، سرعت، ارتفاع پرواز و شناسههای برچسب هر پرنده در یک بازه زمانی 0.25 ثانیه در طول پروازهای آزمایشی ثبت شد. مدل رقومی ارتفاع (DEM) منطقه مورد تحقیق با وضوح فضایی 25 متر نیز در این مطالعه استفاده شد که در بخشهای بعدی توضیح داده خواهد شد.
2.2. مدل
ما یک مدل دستهبندی و ناوبری از کبوترهای خانگی برای شبیهسازی پرواز گلههای کبوتر از محل رهاسازی به انبار خانه طراحی کردیم. ما از پروتکل “ODD” (نمای کلی، مفاهیم طراحی و جزئیات) [ 62 ] در توصیف مدل پیروی کردیم و مدل را در نرم افزار Netlogo [ 63 ] پیاده سازی کردیم. هدف پروتکل ODD سادهسازی فرآیند نوشتن و خواندن توضیحات مدل است و به طور گسترده در جامعه مدلسازی مبتنی بر عامل پذیرفته شده است [ 64 ، 65 ]. جنبههای خاص پروتکل ODD که در مدل خود ثبت کردیم، همانطور که در بخشهای بعدی توضیح داده شده است.
2.2.1. هدف
هدف از این مدل دستیابی به درک بهتری از رفتار ناوبری کبوترهای خانگی با شناسایی محدوده بهینه پارامترهای حاکم بر تصمیمات ناوبری آنها بود.
2.2.2. موجودیت ها، متغیرهای حالت و مقیاس ها
موجودیت های ارائه شده در مدل شامل عوامل کبوتر، انبار خانه و محیط است. دو مجموعه از عوامل کبوتر در مدل نشان داده شده است. عوامل “واقعی” که قوانین ناوبری خود را از داده های تجربی که در مسیرهای GPS شبیه سازی شده گرفته شده است و پرندگان “شبیه سازی شده” که از قوانین هجوم و ناوبری برای حرکت به انبار خانه استفاده می کنند، استخراج می کنند. تعداد عوامل کبوتر (“واقعی” یا “شبیهسازی شده”) که در مدل نشان داده شده است از 7 تا 9 بسته به تعداد کبوترهای اسیر شده در مسیرهای پرواز تجربی مربوطه متغیر است. در این مدل یک زیرخانه تکی مشخص شده و به عنوان عامل ثابت نشان داده شده است. محیط به عنوان یک سطح توپوگرافی که از DEM مشتق شده است نشان داده می شود. وسعت فضایی منطقه مورد مطالعه تقریباً 17 کیلومتر در 17 کیلومتر است. یک گام زمانی واحد در مدل نشان دهنده 0 است. 25 ثانیه در دنیای واقعی مقیاس زمانی 0.25 ثانیه انتخاب شد زیرا همان فاصله زمانی است که مسیرهای GPS بایگانی شدند. یک پرواز کامل از محل رهاسازی تا انبار خانه تقریباً 20 دقیقه است که تقریباً 4800 گام زمانی در مدل است. برای اینکه به طور قطعی متغیرهای حالتی را که برای این نوع مدل ضروری هستند به دست آوریم، ما به ادبیات ABM برای حرکت حیوانات اعتماد کردیم [66 ]. متغیرهای حالت عوامل کبوتر شامل مختصات آنها، سمت فعلی، تعداد جفت گله، فاصله گام که در هر مرحله زمانی متغیر است، زاویه چرخش نسبی (بر حسب درجه) در آخرین مرحله زمانی، سینوسی مسیر پرواز فعلی. و فاصله پرواز تجمعی از محل رهاسازی تا مکان فعلی. متغیرهای حالت انبار خانه مختصات آن هستند که در طول شبیه سازی ثابت می مانند. متغیرهای حالت محیط مختصات تکهها و ارتفاع مرتبط با آنها هستند.
2.2.3. بررسی اجمالی فرآیند و زمانبندی
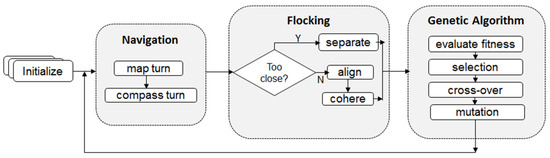
گردش کار خلاصهای از فرآیندهای کلیدی که در مدل پیادهسازی شدهاند در شکل 1 نشان داده شده است; فرآیندهای اصلی شامل مقداردهی اولیه موجودیتهای مدل، اجرای روشهای ناوبری و دستهبندی، و تکامل پارامترهای مدل از طریق الگوریتمهای ژنتیک است. رفتارهای ناوبری شامل چرخش نقشه و چرخش قطب نما است. روش چرخش نقشه تضمین می کند که مسیرهای پرواز عوامل کبوتر توسط فرم های منظره هدایت می شوند. این رفتار به گونه ای اجرا می شود که عوامل کبوتر در امتداد یک کانتور توپوگرافی منظم پرواز کنند. چرخش قطب نما برگرفته از این فرض است که کبوترها به طور کلی می توانند حرکت را به سمت انبار خانه خود حس کنند. رویه چرخش قطب نما تضمین می کند که ماموران به سمت یک یاتاقان عمومی به سمت انبار خانه خود پرواز می کنند. رفتار دسته جمعی توسط قوانین جداسازی، همسویی و انسجام همانطور که در ابتدا در مدل boids تعریف شده بود کنترل می شود [ 67]]. الگوریتم ژنتیک برای تکامل پارامترهای ناوبری و گله پس از هر مرحله زمانی استفاده می شود.
در طول دوره های آموزشی مدل، عوامل “واقعی” و “شبیه سازی شده” مقداردهی اولیه شده و به طور همزمان در مدل شبیه سازی می شوند. به طور کلی، شبیه سازی شامل فرآیندهای زیر است.
-
متغیرهای حالت عوامل کبوتر به روز می شوند (یا اگر در ابتدای مدل باشند مقداردهی اولیه می شوند).
-
نمایندگان تصمیمات ناوبری را اجرا می کنند. به طور خاص، عوامل «واقعی» از مقادیر زاویه چرخش نسبی ( میانگین چرخش ) و فاصله گام استفاده میکنند که ویژگیهایی هستند که در جریان دادههای تجربی GPS ثبت میشوند تا مسیر خود را با زاویهای معادل چرخش متوسط و حرکت رو به جلو هدایت کنند. با فاصله ای معادل فاصله گام . از سوی دیگر، عوامل «شبیهسازیشده» رفتارهای ناوبری خود را بر اساس دو مدل فرعی انتخاب میکنند که بهعنوان چرخش نقشه و چرخش قطبنما مشخص میشوند . هدف پارامتر نقشه-چرخش ، به طور متناوب به عنوان ارتفاع-پیچ نامیده می شودجهت دهی مجدد عناوین عامل و اجازه دادن به عوامل برای پرواز در امتداد یک کانتور توپوگرافی کنترل شده است. از سوی دیگر، چرخش قطبنما تضمین میکند که یک نماینده به صورت پویا یک یاتاقان کلی را در طول مسیریابی نسبت به یک انبار خانه شناخته شده حفظ میکند.
-
ماموران جفت گله را پیدا می کنند که با آنها حرکت کنند. قوانین دسته بندی از مدل گله رینولدز [ 67 ] پذیرفته شده است و توسط روش های جداسازی، همسویی و انسجام هدایت می شود. این رویهها توسط پارامترهای مدل کنترل میشوند که بهعنوان حداقل فاصله جداسازی، حداکثر دور جداسازی، حداکثر چرخش تراز و حداکثر چرخش منسجم مشخص میشوند. روش جداسازی جایگزین سایر رویه ها تحت رفتار گله می شود و به وسیله آن، یک عامل جهت پرواز خود را تغییر می دهد تا از برخورد با جفت گله در نزدیکی خود جلوگیری کند. پیاده سازی مدل flocking به عنوان یکی از مدل های کتابخانه در بسته NetLogo [ 68] گنجانده شده است.] و این همان چیزی است که ما برای تناسب با مشخصات و اهداف مدل ارائه شده در اینجا اصلاح و اتخاذ کردیم.
-
جدای از رفتارهای ناوبری و هجوم، عوامل همچنین می توانند به طور تصادفی به چپ خود ( چرخش-تصادفی-چپ ) یا به راست ( چرخش-تصادفی-راست ) بر اساس یک احتمال ( تصادفی-گردش-پروب ) بچرخند.
-
یک الگوریتم ژنتیک برای تکامل جمعیت اولیه پارامترهای کاندید و برای بهینهسازی محدوده پارامترهای پرواز پیادهسازی میشود.
-
خروجی تولید می شود؛ این شامل مختصات عامل ها، فاصله گام ها، چرخش تجمعی در گام زمانی مربوطه، سینووسیت مسیر پرواز، کروموزوم عامل فعلی و مقدار تناسب مرتبط با کروموزوم فعلی عامل است.
2.2.4. مفاهیم طراحی
-
ظهور: ما به طیف وسیعی از پارامترها علاقه مند هستیم که مسیرهای پرواز واقعی و رفتارهای ناوبری قابل مشاهده عوامل کبوتر خانگی را بازتولید می کنند. به طور خاص، ما به دنبال راهروهای قابل مشاهده و حلقههای احتمالی در مسیرهای پروازی هستیم که از ناوبری، دستهجمعی و تصمیمهای تصادفی کبوترها بیرون میآیند.
-
انطباق: عوامل تصمیمات انطباقی در حین گله شدن و همچنین در شناسایی جهت های بهینه پرواز با در نظر گرفتن محدودیت های ناوبری و پارامترهای گله می گیرند.
-
اهداف: هدف عوامل “شبیهسازی شده” این است که با دنبال کردن مسیرهای کارآمد به انبار خانهای با موفقیت حرکت کنند. این امر با اجتناب از مناطقی با تغییرات ناگهانی ارتفاع و ترجیحاً با پیمایش در گله به دست می آید.
-
حس کردن: عوامل کبوتر می توانند عوامل دیگر (جفت گله) را در همسایگی خود حس کنند. یک همسایگی عامل با فاصله قابل مشاهده ( دید-فاصله ) و زاویه دید ( زاویه دید ) مشخص می شود. علاوه بر این، عوامل می توانند تفاوت ارتفاع بین مکان فعلی خود و تکه های اطراف در محیط خود را درک کنند.
-
دسته جمعی: عوامل کبوتر ترجیح می دهند در گله ها حرکت کنند که یک گروه اجتماعی از عوامل کبوتر است.
-
مشاهده: جدای از مسیرهای پرواز عواملی که در طول شبیهسازی ترسیم میشوند، نمودارهای اضافی برای نشان دادن تغییرات در زوایای چرخش، میانگین فاصله گام، تناسب کروموزومهای کاندید و سینوسیت مسیرهای پرواز ترسیم میشود. علاوه بر این، یک مانیتور برای گزارش زمان سفر تجمعی نمایندگان استفاده می شود. زمان پرواز (بر حسب دقیقه) همانطور که در رابطه (1) نشان داده شده است.t = 0.25 (t i c k s60)تی=0.25(تیمنجکس60)
2.2.5. داده های ورودی
جریانهای دادههای حسگر شبیهسازیشده، که از مسیرهای آزمایشی GPS کبوترهای خانگی مشتق شدهاند، پارامترهای ناوبری را برای عوامل «واقعی» فراهم میکنند. این دادهها بهصورت پویا در محیط مدلسازی NetLogo بهعنوان دادههای برداری نقطهای GIS در قالب فایل شکل بارگذاری شدند. جدول 1 تعداد نقاط داده و تعداد پرندگان نمونه را نشان می دهد که در هر یک از پنج پرواز خانگی در داده های تجربی (تجربی) گرفته شده اند. جدای از مسیرهای GPS، یک DEM در مدل برای نشان دادن تغییرپذیری فضایی در ارتفاع محیط ناوبری استفاده شد.
2.2.6. مدل های فرعی
ما از تعدادی مدل فرعی برای پیاده سازی فرآیندهای اصلی در مدل استفاده کردیم. جدول 2 فهرستی از مدل های فرعی که در مدل مشخص و پیاده سازی شده اند را نشان می دهد. مدلهای فرعی فرآیندهای گلهسازی از مدل NetLogo flocking [ 68 ] اصلاح شدند. به طور مشابه، ما ایدههایی را برای مدلهای فرعی ایجاد نسل جدید و جهش از مدل Robby the Robot در NetLogo [ 69 ] پذیرفتیم و اصلاح کردیم. جدا از مدل های فرعی مشخص شده ( جدول 2ما همچنین تعدادی از رویههای گزارشگر (توابع) را برای محاسبه کلی و تکراری پارامترهای مختلف که برای اجرای موفقیتآمیز فرآیندهای مدل و مدلهای فرعی مختلف مهم هستند، تعریف کردیم. اینها شامل گزارشگرانی برای محاسبه متغیرهای حالت مانند سینووسیت، عنوان ارتفاع، عنوان قطب نما و تناسب عامل در میان سایر موارد بود.
2.2.7. پارامترهای مدل
پارامترهای مدل، محدودیتهای قابلیتهای عواملی را که در یک مدل نشان داده میشوند، تعیین میکنند. جدول 3 فهرستی از پارامترهای مدل را نشان می دهد که در مدل مشخص شده اند. در حالی که اکثر پارامترهای اولیه را می توان توسط کاربر تنظیم کرد، فاصله حداقل گام و حداکثر فاصله گام به صورت ریاضی در مدل تعریف شد. به طور خاص، حداقل فاصله-گام از تابع عادی تصادفی ( تصادفی-عادی ) با میانگین 2.0 و انحراف استاندارد 0.5 تعریف می شود، در حالی که حداکثر فاصله-گام به عنوان مجموع فاصله دقیقه-گام محاسبه می شود.و عدد تصادفی تولید شده از توزیع نرمال با میانگین 5.0 و انحراف استاندارد 1.0. مقادیر میانگین و انحراف معیار که برای تخمین متغیرهای حداقل گام-فاصله و حداکثر-گام-فاصله مورد استفاده قرار گرفتند در داده های مسیر مشاهده شده از قبل محاسبه شدند.
جدا از پارامترهای نرخ جهش و نسبت جایگزینی که به طور دلخواه توسط نویسندگان مشخص شد، پارامترهای مدل اولیه باقی مانده در جدول 3 با تعیین و کالیبره کردن یک مدل معمولی به دست آمد. هدف از مدل مرسوم شناسایی محدوده مناسبی از پارامترها برای شبیه سازی گله و رفتار ناوبری کبوترهای خانگی [ 33 ] بود. کالیبراسیون بر روی مسیرهای GPS اولین پرواز خانگی (پرواز خانگی 1) در داده های تجربی انجام شد.
2.2.8. مقداردهی اولیه
در ابتدای شبیه سازی، تعداد پرندگان در داده های تجربی، که به عنوان مبنای مشخص کردن رفتار عامل “واقعی” استفاده می شود، به طور مشابه برای تعیین تعداد عوامل “شبیه سازی شده” برای ایجاد و شبیه سازی استفاده می شود. مدل. این کار برای داشتن عوامل شبیه سازی شده به عنوان آینه ای از همتایان واقعی (مشاهده شده) آنها انجام شد. اولین مجموعه مختصات عوامل “واقعی” برای قرار دادن عامل “شبیه سازی شده” در دنیای مدل استفاده شد. به هر عامل “شبیه سازی شده” کروموزوم اختصاص داده شد که پارامترهای ناوبری را مشخص می کرد. کروموزومها بهعنوان بردارهای خطی پارامترهای دستهبندی و ناوبری کدگذاری شدند که عبارتند از : حداکثر چرخش همترازی ( At )، حداکثر چرخش انسجام ( Ct ) ، حداکثر چرخش جداسازی.St ) ، حداکثر چرخش زیر شیروانی ( Lt ) ، حداکثر پیچ در ارتفاع ( Et )، فاصله دید ( Vd ) ، حداکثر زاویه دید ( Va ) ، حداقل فاصله گام ( Sn ) ، حداکثر فاصله گام ( Sm ) و زاویه چرخش تصادفی ( R t ). شکل 2 تصویری از نحوه سازماندهی پارامترهای مدل در کروموزوم یک عامل است. این مشخصات با استفاده از ساختارهای داده لیست در NetLogo به فعلیت می رسد.
یک اختلال تصادفی با افزودن یک مقدار تصادفی از یک توزیع نرمال با میانگین 0.0 و انحراف استاندارد 0.1 به هر یک از عناصر یک کروموزوم به پارامترها اعمال می شود. این تضمین میکند که هر عامل یک کروموزوم اولیه منحصربهفرد اختصاص مییابد که بر اساس آن تصمیمگیریهای دستهبندی و ناوبری خود را پایهگذاری میکند.
2.3. تخمین پارامتر و بهینه سازی
در هر مرحله زمانی، تعدادی متغیر حالت برای توصیف وضعیت عوامل مختلف در طول عمر مدل تخمین زده می شود. متغیر حالت مورد علاقه در این کار شامل فاصله گام، فاصله پرواز، زاویه چرخش نسبی، سینوسی مسیر پرواز و تناسب عوامل کاندید (در دورههای آموزشی مدل) بود. فاصله قدم (اسدمن)(اسدمن)مسافت گسسته ای است که یک عامل در یک مرحله زمانی طی می کند. این به عنوان تابعی از حداقل فاصله گام تخمین زده می شود (اسnمن) (اس�من)و حداکثر فاصله گام ( اسمترمن)اسمترمن)همانطور که در رابطه (2) نشان داده شده است.
G i v e n اسnمن،اسمترمن ∈ R ، اسدمن= اسnمن+ r a n dجیمن�ه� اس�من،اسمترمن ∈ℝ، اسدمن= اس�من+�آ�د
جایی که رند ∈ [ 0 , | اسمترمن–اسnمن| ]∈[0، |اسمترمن–اس�من|].
فاصله پرواز ( اسfمناس�من) طول تجمعی مسیر پروازی است که توسط یک مامور طی می شود و به عنوان مجموع فواصل گام های فردی از ابتدای مدل تا مرحله زمانی فعلی تخمین زده می شود. زاویه چرخش نسبی به عنوان مجموع چرخش های ناوبری، انبوه و تصادفی که توسط یک عامل در هر مرحله زمانی انجام می شود، تخمین زده می شود. سینووسیتی معیاری از کارایی مسیری است که توسط یک عامل دنبال می شود و به عنوان نسبت فاصله پرواز و فاصله اقلیدسی بین دید رهاسازی و مکان فعلی عامل محاسبه می شود. تناسب اندام در متن این کار، معیاری است برای اینکه چگونه پارامترهای ناوبری نامزد مسیرهای پرواز کبوترهای ساکن را شبیهسازی میکنند و به عنوان تابعی از سینوسی مسیر پرواز و نزدیکی مکانهای عامل شبیهسازی شده به مکان «واقعی» محاسبه میشود. عوامل در مدل به طور مشخص، fمن�من) به عنوان مجموع مولفه تناسب اندام ( fد�د) ناشی از فاصله اقلیدسی ( دد( fس�س) ناشی از تفاوت سینوسیته ( سس) از مسیرهای عوامل «شبیهسازی شده» و مسیرهای عوامل «واقعی». معادلات (3) و (4) نشان می دهد که چگونه دو جزء تابع تناسب تخمین زده می شود. انتخاب ما از سینوسیتی به عنوان یکی از متغیرهای تابع تناسب با این واقعیت است که سینوسیت یک پارامتر ناوبری ترکیبی است. به طور خاص، سینوسیتی شامل تأثیر رفتار تصادفی، زوایای چرخش نسبی و فاصلههای گام بر رفتار ناوبری یک عامل متحرک است. علاوه بر این، سینوسیته و مکانهای مسیرهای پرواز شبیهسازی شده، تابعی از زوایای چرخش و فواصل گام هستند. به این ترتیب، ما یک تابع تناسب حاصل از ترکیبی از تفاوتهای سینوسی و موقعیت مسیرهای پرواز را برای آزمایش حساسیت پارامترهای مدل خود در طول شبیهسازی مناسب در نظر گرفتیم.
fد=⎧⎩⎨⎪⎪1 ، i f د= 0 د– 1، من f 0 < d≤ 1000− 0.01 d، من f د> 1000�د={1، من� د=0 د–1، من� 0<د≤1000–0.01د، من� د>1000
fس=⎧⎩⎨⎪⎪1 ، s = 0 0.01س– 1, 0 < s ≤ 0.50.01 ( s − 1 ) ، s > 0.5�س={1، س=0 0.01س–1، 0<س≤0.50.01(س–1)، س>0.5
در اجرای الگوریتم ژنتیک، تصمیمات گله و ناوبری عوامل “شبیه سازی شده” توسط پارامترهای مشخص شده در عناصر کروموزوم مربوطه آنها هدایت می شود. تصمیمات اتخاذ شده توسط عوامل شبیه سازی شده در هر مرحله زمانی با مقادیر تناسب مرتبط آنها که با توجه به تابع تناسب مشخص شده در معادلات (3) و (4) محاسبه شد، ارزیابی شد. بسته به نرخ جایگزینی از پیش تعریف شده ( نسبت جایگزینی)، نسبتی از عوامل شبیه سازی شده، که با مقادیر تناسب اندک در پایان هر مرحله زمانی مشخص می شوند، از مدل حذف شدند. یک روش انتخاب نخبهگرا برای انتخاب دو عامل والد از نسبت باقیمانده عوامل استفاده شد. والدین انتخاب شده به جای عوامل حذف شده، از تخم بیرون می آورند. اپراتورهای انتخاب نخبهگرا که شامل رتبهبندی و انتخاب مسابقات میشوند، در مقایسه با طرحهای انتخاب متناسب و مبتنی بر رولت، کارآمدتر هستند [ 70 ، 71 ]. کروموزوم های نسل جدید عوامل از طریق تقاطع تک نقطه ای کروموزوم های والد ایجاد شدند. فرآیند متقاطع / نوترکیبی با کمک نسل جدید ایجاد شدرویه در مدل علاوه بر این، یک روش جهش ( جهش ) برای تغییر تصادفی ژنهای کروموزومهای عوامل شبیهسازی شده اجرا شد. این فرآیند تا زمانی که جریانهای دادههای حسگر شبیهسازیشدهای وجود داشت که برازش عوامل شبیهسازیشده بر اساس آنها ارزیابی میشد، بهطور مکرر اجرا شد. پنجاه شبیه سازی اجرا شد. در هر اجرا، کروموزوم های عوامل در نسل نهایی عوامل و مقادیر تناسب مرتبط ثبت شد. پارامترهای این مجموعه نهایی کروموزومهای هر مدل اجرا شده بهعنوان مجموعه بهینهشده پارامترها از اجرای مدل مربوطه در نظر گرفته شد و در بسته آماری R مورد تجزیه و تحلیل بیشتر قرار گرفت. هدف از تجزیه و تحلیل آماری بیشتر شناسایی توزیع آماری و الگوهای پارامترهای بهینه شده بود.
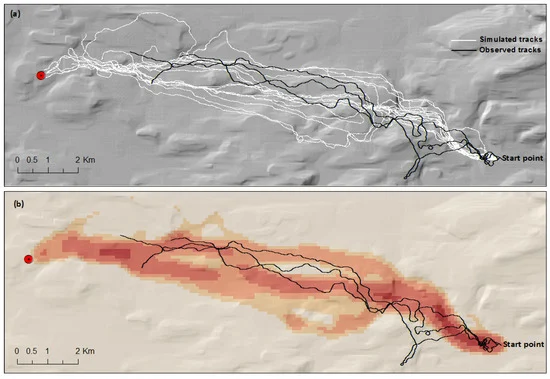
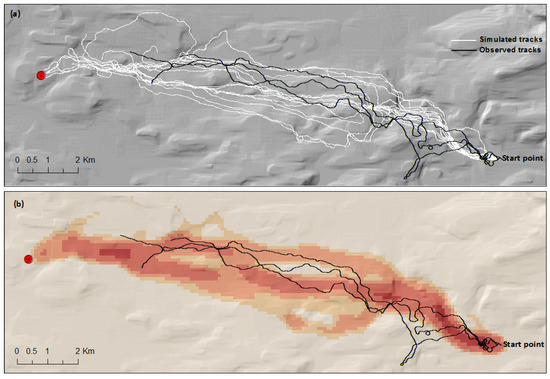
ما نتایج مدل را در برابر جریانهای داده حسگر شبیهسازی شده از پروازهای خانگی 3، 4، و 5 از دادههای ردیابی GPS تجربی تأیید کردیم. به طور خاص، اعتبار سنجی در برابر سه متغیر حالت شامل زاویه چرخش نسبی، فاصله گام و سینوسی مسیرهای پرواز انجام شد. ما از میانگین هندسی و انحراف استاندارد پارامترهای بهینهسازی شده برای تولید پارامترهایی استفاده کردیم که در اجراهای اعتبارسنجی مدل مورد استفاده قرار گرفتند. به طور خاص، این شامل اجرای یک تابع عادی تصادفی ( تصادفی-نرمال) در NetLogo برای تولید پارامترهای اعتبار سنجی مربوطه بر اساس میانگین تخمینی و انحراف استاندارد پارامترهای بهینه شده. ابزار BehaviorSpace در NetLogo برای اجرای مکرر اعتبارسنجی مدل در حالی که از محدوده بهینهسازی شده به عنوان مرزهای فضای پارامتر استفاده میکند، استفاده شد. سپس از آزمون t Student در فاصله اطمینان 95% برای مقایسه مقادیر فاصله گام ( فاصله گام ) و زوایای چرخش نسبی ( میانگین چرخش) استفاده کردیم.) مسیرهای پرواز شبیه سازی شده و تجربی. علاوه بر این، ما سینوسی مسیرهای شبیهسازیشده و مسیرهای تجربی را ترسیم کردیم تا یک مقایسه بصری در ویژگیهای مسیر پرواز عوامل شبیهسازیشده و عوامل واقعی ارائه کنیم. نتایج این تحلیل در بخش بعدی ارائه شده است. در نهایت، ما از مختصات عوامل در اجرای اعتبارسنجی برای ترسیم مسیرهای پرواز عوامل شبیهسازی شده و تخمین راهروهای آزمایشی که از مسیرهای پرواز مربوطه بیرون میآیند، استفاده کردیم.
3. نتایج
یک خروجی مهم از این مطالعه مجموعه ای از پارامترهای بهینه است که بر اساس آن عوامل کبوتر می توانند از یک محل رهاسازی به یک انبار شناخته شده حرکت کنند. جدول 4 خلاصه ای از میانگین و فاصله اطمینان پارامترهای بهینه جهت یابی کبوترهای ساکن را که در این مطالعه اجرا شده است نشان می دهد. لازم به ذکر است که گله کردن جنبه مهمی از این مدل است و پارامترهای مرتبط نیز همینطور هستند زیرا این پارامترها برای اطمینان از حرکت کبوترها در گله مهم هستند. تمام پارامترهای زاویه ای بر حسب درجه (°) هستند در حالی که پارامترهای مربوط به فاصله بر حسب متر (m) ارائه می شوند. به استثنای زاویه چرخش تصادفی (± 2.5 درجه)، اکثر پارامترهای زاویه ای در عرض باریک فواصل اطمینان (± 0.3 درجه) مشخص شدند.
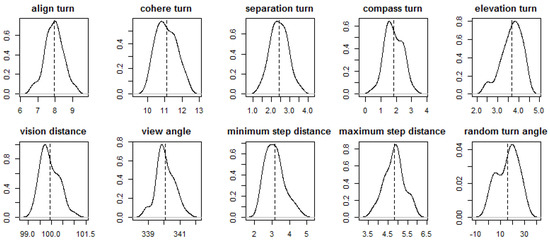
ما بیشتر نمودارهای توزیع چگالی محدوده بهینه پارامترهای ناوبری را ترسیم کردیم ( شکل 3 ) تا یک نمایش بصری از گسترش پارامترهای مربوطه ارائه دهیم. مقدار میانگین پارامترهای بهینه شده با خطوط نقطه چین نشان داده می شود. یک بار دیگر مشاهده کردیم که در همه موارد، محدوده بهینهسازی شده پارامترها به طور کلی لپتوکورتیک با غلظت مقادیر بهینه در اطراف میانگین بود.
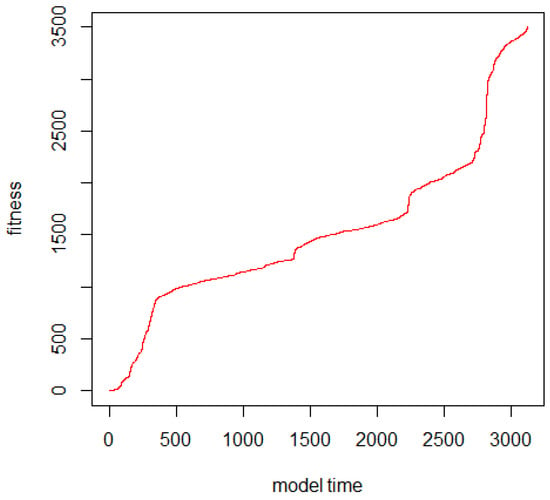
علاوه بر پارامترهای بهینه شده، ما همچنین تغییرات زمانی مقادیر برازش پارامترهای بهترین عملکرد را در هر یک از سناریوهای مدل تجربی رسم کردیم. تغییرات مقادیر تناسب در برابر زمان مدل (تیک) در شکل 4 نشان داده شده است . این نمودار از مقادیر تجمیع شده 50 اجرای شبیه سازی نمونه ترسیم شده است. ما افزایش شدیدی در مقادیر تناسب اندام کروموزومهایی که بهترین عملکرد را داشتند در 500 مرحله زمانی اول (0 تا 2 دقیقه) مشاهده کردیم، به دنبال آن بهبود متوسطی در تناسب اندام در دوره بین 500 تا 2600 مرحله زمانی (2 تا 10 دقیقه) و پس از آن دیگر دوره افزایش سریع ارزش های تناسب اندام به عنوان عوامل نزدیک تر به انبار خانه.
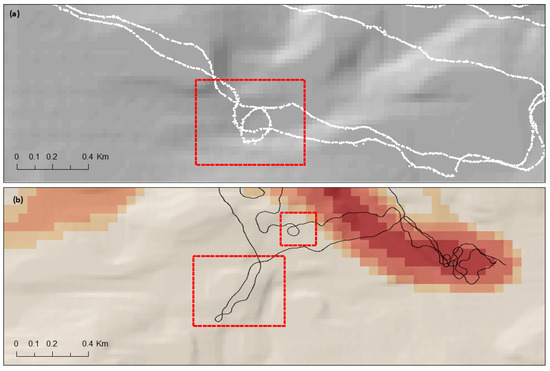
محدوده بهینهشده پارامترها، ورودی را برای اعتبارسنجی مدل ارائه میکند. خروجی اجراهای اعتبارسنجی شامل مختصات آنی عوامل شبیهسازیشده، مقادیر زوایای چرخش نسبی، فاصلههای گامها و سینوسیته تخمینی مسیر پرواز در هر مرحله زمانی بود. نقشه های مسیرهای پرواز شبیه سازی شده در برابر داده های اعتبارسنجی در شکل 5 ارائه شده است . جدا از مکانهای شبیهسازیشده پرندگانی که در آزمایشهای اعتبارسنجی ثبت شدهاند، ما از یک سطح تخمین چگالی هسته (KDE) برای نشان دادن راهروهای پروازی احتمالی در منطقه مورد مطالعه استفاده کردیم. انتخاب ما از KDE به عنوان روشی برای تخمین کریدور پرواز به دلیل این واقعیت بود که این روش به طور گسترده مورد استفاده قرار گرفته است [ 72 , 73] برای تخمین محدوده خانگی موجودات مختلف. علاوه بر این، مشاهده کردیم که با استفاده از محدوده بهینه پارامترها در شبیهسازی، امکان تکرار حلقهها در مسیرهای پرواز وجود دارد. این الگویی است که در مسیرهای تجربی پرواز کبوتر نیز مشهود بود. یک مثال در شکل 6 مشخص شده است .
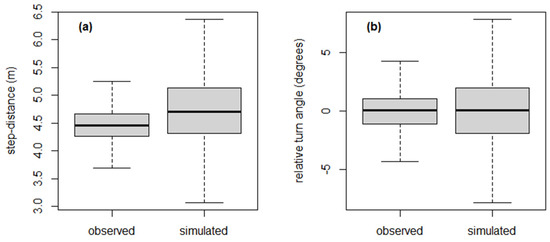
مقایسه آماری متغیرهای حالت شبیهسازی شده فاصله گام و زاویه چرخش نسبی در دو بخش به دست آمد. ابتدا از نمودارهای جعبه و سبیل برای نشان دادن میانه و توزیع متغیرهای مشاهده شده و شبیه سازی شده همانطور که در شکل 7 نشان داده شده است استفاده کردیم.. ما متوجه شدیم که در حالی که میانه مقدار مشاهده شده فاصله گام تقریباً 4.5 متر است، میانه فاصله گام شبیه سازی شده کمی بیشتر در حدود 4.7 متر است. میانگین مقادیر مشاهده شده و شبیه سازی شده زوایای چرخش نسبی در طول مسیریابی در هر دو مورد تقریباً برابر با 0 درجه بود. علاوه بر این، برای هر دو فاصله گام و زاویه چرخش نسبی، دامنه مقادیر شبیهسازی شده در مقایسه با محدوده مقادیر مشاهدهشده کمی وسیعتر بود (3 متر تا 6.4 متر در مقابل 3.6 متر تا 5.3 متر در مورد فواصل پله و 10- درجه تا 10 درجه در مقابل 5- تا 5 درجه در مورد زاویه چرخش نسبی). نتایج آزمون T نشان داد که مقادیر میانگین فاصله گام عوامل کبوتر از پارامترهای ناوبری بهینه (25/0±74/4 متر) و مقادیر ثبت شده در داده های تجربی (0±47/4 متر) شبیه سازی شده است.p -value = 0.012). به طور مشابه، مقدار میانگین زاویه چرخش نسبی شبیه سازی شده (0.02 ± 0.02 درجه) از نظر آماری با مقدار میانگین داده های مشاهده شده (0.15 ± 0.07 درجه) با مقدار p <0.005 برابر بود .
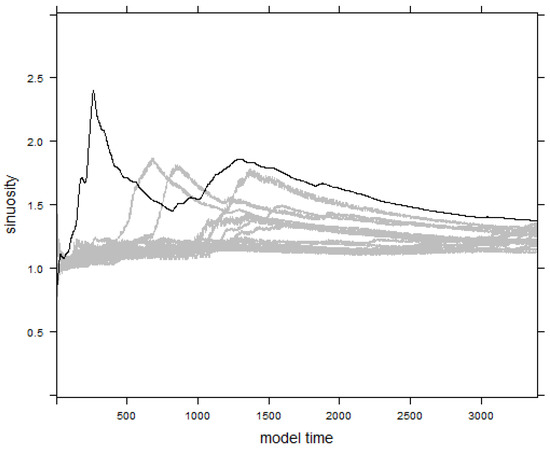
مجموعه نهایی خروجیهایی که از این مطالعه در نظر گرفتیم، تغییر زمانی در سینوسی مسیرهای پرواز بود که نمایش گرافیکی آن در شکل 8 نشان داده شده است . در نتایج، مشاهده کردیم که نمودار سینوسی مسیرهای پرواز کبوترهای واقعی که با تجمیع مقادیر فردی پرندگان در پروازهای خانگی 3، 4 و 5 ایجاد کردیم، عموماً بالاتر از مقادیر شبیهسازی شده بود که نشان میدهد پارامترهای ناوبری تصفیه شده منجر به عواملی که مسیرهای کمی کارآمدتر را دنبال می کنند. علاوه بر این، در حالی که کبوترهای واقعی تقریباً دو دقیقه اول (≈500 کنه) را پس از رهاسازی برای جهت دهی مجدد می گذرانند، پارامترهای بهینه شده این را در نظر نمی گیرند، از این رو سینوسی مسیرهای پرواز را در مراحل اولیه شبیه سازی دست کم می گیرند.
4. بحث
در این مطالعه، ما از جریانهای دادههای حسگر شبیهسازیشده برای ارائه یک مکانیسم پیوسته برای ارزیابی تصمیمهای عامل در طول عمر یک مدل استفاده کردیم. نتیجه مجموعه ای از پارامترهای مدل بهینه شده است که می تواند برای شبیه سازی رفتار ناوبری کبوترهای خانگی مورد استفاده قرار گیرد. برخلاف مدلهای مرسوم، که خروجی آن مجموعهای مستقل از پارامترهای کالیبرهشده است که میتواند به عنوان واقعیترین نمایش سیستم مورد نظر در نظر گرفته شود، پیادهسازی الگوریتمهای ژنتیک برای بهینهسازی منجر به طیف وسیعی از مقادیر برای هر پارامتر شد. این اجازه می دهد تا دامنه وسیع تری از فضای پارامترها را که در آن مدل می تواند اعتبار سنجی شود. مدل ما به ویژه در شبیهسازی متغیرهای حالت کلیدی در مدل از جمله فاصلههای گام و زاویه چرخش نسبی عوامل دقیق بود. بهینهسازی همچنین این مزیت را دارد که منجر به پارامترهای قوی میشود که میتوانند الگوهای نوظهور را در رفتار عاملها تکرار کنند. در این کار، پارامترهای بهینهشده با موفقیت حلقهها را در مسیر پرواز کبوترهای خانگی تکرار کردند، الگویی که در مطالعات دیگر مشاهده شده است.74 ]. این موفقیت در ابتدا با استفاده از پارادایم ABM مرسوم امکان پذیر نبود [ 33 ]. حتی اگر ایجاد یک رابطه ریاضی بین پارامترهای مدل و الگوهایی مانند حلقه ها دشوار است، چنین الگوهایی شواهد کیفی را ارائه می دهند که می تواند در مدل سازی الگومحور استفاده شود [75 ] .
مشاهده کردیم که مقادیر تناسب پارامترهای مدل کاندید با پیشرفت مدلها بهبود یافته است ( شکل 4، نشان دهنده اصلاح پارامترهای مدل به سمت نمایش بهینه سیستم زیربنایی است. در حالی که این امر بر مناسب بودن روشهای تکاملی در مدلسازی و شبیهسازی پدیدههای دینامیکی در محیطهای غنی از داده تأکید میکند، چنین روشهایی خطر ایجاد راهحلهای “فوق العاده مناسب” را نیز دارند. این یکی از چالش هایی است که ما در پیاده سازی مدل خود با آن مواجه بودیم. به طور خاص، در حالی که مدل ما روند تغییرات سینوسی مسیر پرواز را به تصویر میکشد، اما به طور کلی کمتر از مقادیر مشاهده شده بود. یک پیشنهاد برای مقابله با بیش از حد برازش مدل در هنگام استفاده از الگوریتمهای ژنتیک، داشتن یک انتخاب مناسب از سوی والدین است که شانس راهحلهای فوقالعاده را از تصاحب فرآیند تکامل محدود میکند [ 76 ]. علاوه بر این، مطالعات دیگر [ 77] اتخاذ رویکردهای ترکیبی را پیشنهاد کردهاند که از روشهای مدلسازی مرسوم برای تکمیل الگوریتمهای ژنتیک با ارائه پارامترهای کالیبرهشده موقت برای راهحل نامزد فرمول اولیه در الگوریتمهای ژنتیک استفاده میکنند. این رویکردی است که ما در اجرای خود اتخاذ کردیم. به عنوان یک جایگزین، پارامترهای اولیه را می توان از تحقیقات مستند و از کارشناسان حوزه [ 78 ] نیز به دست آورد. چنین رویکردی مزیت ایجاد لنگر بین دانش موجود و تحقیقات جدید را دارد. به عنوان مثال، هیبریدیت به دست آمده با ترکیب الگوریتم های ژنتیک و بهینه سازهای محلی برای بهبود کالیبراسیون مدل های اتوماتای سلولی استفاده شده است [ 79 ].
یافتههای ما با مطالعات دیگری مطابقت دارد که نشان دادهاند جذب دادهها در ABMها میتواند توانایی پیشبینی چنین مدلهایی را با تسهیل مشخصات رفتار عامل [ 80 ] و کالیبراسیون مدل [ 81 ] بهبود بخشد. علاوه بر این، با انتخاب یک تابع تناسب که به پارامترهای مدل مختلف حساس است [ 82 ]، استفاده از الگوریتمهای ژنتیک امکان انجام همزمان بهینهسازی و تحلیل حساسیت را فراهم کرد [ 45] .]. انتخاب روشی که تجزیه و تحلیل حساسیت را به عنوان بخشی از بهینهسازی در بر میگیرد، کارایی مدلها را بهبود میبخشد. روشهایی که در این مقاله ارائه کردهایم به یافتن جایگزینهایی برای مدلهای شبیهسازی سنتی کمک میکنند. به طور خاص، مدلهای مبتنی بر قانون مرسوم با تنظیمات پارامتر سفت و سخت و حداقل استفاده از دادههای زمان واقعی از سیستمهای مورد مطالعه مشخص شدهاند [ 23 ]. ما این چالشها را با استفاده از الگوریتمهای ژنتیک برای بهبود پارامترهای مدل در طول شبیهسازی مدیریت کردیم. علاوه بر این، روشها امکان ادغام کارآمد و پویا از دادههای مکانی-زمانی را در مدل فراهم میکنند، بنابراین توانایی پیشبینی مدل را بهبود میبخشند.
در این مطالعه ما سابقه ای از حافظه عوامل فردی نگهداری نکردیم، چنین تلاشی به ویژه به عنوان راهی برای بررسی محرک های واقعی انطباق و تأثیر ویژگی های فضایی محلی بر فرآیند یادگیری و تکامل مورد توجه خواهد بود. علاوه بر این، ما تأثیر تغییرات محیط را بر رفتار عوامل در نظر نگرفتیم. ما این را فرصتی برای تحقیقات آینده می بینیم. به طور خاص، ادغام مشاهدات حسگر درجا و متغیرهای محیطی پویا (شامل شاخصهای پوشش گیاهی و متغیرهای آب و هوایی) از سنجش از دور در ABMها باید در نظر گرفته شود. علاوه بر این، ما فرصت های بیشتری را به ویژه در ادغام همسان سازی داده های پویا [ 81] پیش بینی می کنیم.] روشها و الگوریتمهای تکاملی در اجرای مدلهای مبتنی بر عامل خود کالیبراسیون و تطبیقی. این امر به ویژه برای استفاده از روشهای پیشرفته ضبط دادههای حسگر و شبکههای حسگر زمین مرتبط مفید خواهد بود [ 83 ]. علاوه بر این، تلاشهای ردیابی حیوانات و مدیریت دادهها مانند ابتکار آینده همکاری بینالمللی برای تحقیقات حیوانات با استفاده از فضا (ICARUS) نیز منبع خوبی برای محققانی که علاقهمند به همسان سازی دادههای پویا در مدلهای رفتاری حرکت حیوانات هستند، فراهم میکند. هدف پروژه ICARUS مشاهده/گرفتن الگوهای مهاجرت جهانی حیوانات کوچک و اجازه دادن به دانشمندان برای به دست آوردن بینش در مورد عملکردها و رفتار حیاتی حیوانات است [ 84] .]. ما معتقدیم که دانش حاصل از مطالعه ما در پیادهسازی مدلهای خودکار تشخیص رفتار عامل در برابر منابع مکانی واقعی بهعنوان مواردی که توسط پروژه ICARUS گرفته میشود، مفید خواهد بود.
5. نتیجه گیری ها
در این مطالعه، ما به بررسی چگونگی استفاده از داده های مکانی-زمانی در مورد یک سیستم دنیای واقعی برای بهبود مشخصات یک ABM مبتنی بر قانون پرداختیم. ما این هدف را با اجرای یک الگوریتم تکاملی در برابر دادههایی که جهتیابی کبوترهای خانگی را به تصویر میکشد، ارزیابی کردیم. به طور خاص، دادههای حسگر شبیهسازیشده از مسیرهای GPS یک نمایش مکانی و زمانی پویا از رفتار عوامل مستقل ارائه میدهد. در نتیجه، اینها مبنایی برای ارزیابی رفتار عامل شبیهسازی شده و در نتیجه اعتبار دادن به این فرضیه است که جریانهای داده پویا از مشاهدات حسگر را میتوان در مدلهای مبتنی بر عامل گنجاند تا فرمولبندی رفتارهای عامل را بهبود بخشد و درک سیستمهای زیربنایی را تسهیل کند. مدل ما نشان داد که حتی اگر عوامل مشخص شده در این مطالعه برای به خاطر سپردن تمام حالت های ممکن محیط خود آموزش ندیده بودند، پارامترهای بهینه شده قادر به شبیه سازی متغیرهای حالت اصلی مدل بودند. به طور خاص، پارامترهای بهینه شده به طور دقیق زاویه چرخش نسبی و فاصله گام را شبیه سازی کردند، که برای توصیف مسیر حرکت حیوانات حیاتی هستند. به غیر از پیشبینی متغیرهای حالت، پارامترهای بهینهشده همچنین حلقههایی را در مسیر پرواز کبوترهای خانگی تکرار میکنند. حلقه ها یک الگوی متمایز هستند که معمولاً در مسیر پرواز کبوترها مشاهده می شوند، اما تکرار آنها با استفاده از ABM های معمولی آسان نبوده است. بدیهی است که استفاده از دادههای مکانی-زمانی ریز در مورد سیستمهای مورد علاقه برای ارائه ارزیابی پویا و بهینهسازی پارامترهای مدل منجر به پارامترهای قوی میشود. چنین پارادایم های داده محور می توانند قابلیت انتقال پارامترهای مدل را به سناریوهای دیگر بهبود بخشند. اساساً، در دسترس بودن دادههای پویا و با وضوح بالا امکان استفاده از چنین دادههایی را برای توسعه مدلهای قابل قبول بدون اتکای بیش از حد به نظریهها زیر سوال میبرد. ما این را به عنوان مرز بعدی برای محققانی که علاقه مند به مدل های عامل مبتنی بر قانون هستند پیش بینی می کنیم.
منابع
- آن، جی. Mi، Q. دوتا-موسکاتو، جی. Vodovotz، Y. مدل های مبتنی بر عامل در زیست شناسی سیستم های ترجمه. وایلی اینتردیسیپ. کشیش سیست. Biol. پزشکی 2009 ، 1 ، 159-171. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Xiang، X. کندی، آر. مدی، جی. Cabaniss، S. تایید و اعتبار مدل های شبیه سازی علمی مبتنی بر عامل. در مجموعه مقالات کنفرانس شبیه سازی به کارگردانی عامل، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 23 تا 28 ژوئیه 2005.
- هپنستال، ا. مالسون، ن. Crooks، A. “فضا، مرز نهایی”: مدل های مبتنی بر عامل چقدر در شبیه سازی افراد و فضا در شهرها خوب هستند؟ Systems 2016 , 4 , 9. [ Google Scholar ] [ CrossRef ]
- گونگ، جی. گنگ، جی. Chen, Z. مدل داده های GIS در زمان واقعی و بستر خدمات وب حسگر برای مدیریت داده های محیطی. بین المللی J. Health Geogr. 2015 ، 14 ، 2. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- گرانل، سی. دیاز، ال. Gould، M. برنامه های کاربردی سرویس گرا برای مدل های محیطی: خدمات مکانی قابل استفاده مجدد. محیط زیست مدل. نرم افزار 2010 ، 25 ، 182-198. [ Google Scholar ] [ CrossRef ]
- ماینتر، ام جی. جارویس، سی. Dowers, S. از برنامههای مستقل به سمت خدمات و مؤلفههای آگاه از شبکه: مطالعه موردی در مدلسازی کشاورزی با دادههای آب و هوایی درونیابی. محیط زیست مدل. نرم افزار 2003 ، 18 ، 379-391. [ Google Scholar ] [ CrossRef ]
- برورینگ، آ. اکترهوف، جی. جیرکا، س. سیمونیس، آی. اوردینگ، تی. استاش، سی. لیانگ، اس. Lemmens, R. فعال سازی وب سنسور نسل جدید. Sensors 2011 , 11 , 2652-2699. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- برورینگ، ا. فورستر، تی. جیرکا، س. Priess، C. گذرگاه سنسور: یک لایه واسطه برای اتصال ژئوسنسورها و شبکه حسگر. در مجموعه مقالات اولین کنفرانس بین المللی و نمایشگاه محاسبات برای تحقیقات و کاربردهای جغرافیایی، واشنگتن، دی سی، ایالات متحده آمریکا، 21 تا 23 ژوئن 2010.
- آهنگ، X. وانگ، سی. کاگاوا، م. رغوان، وی. پورتال پایش بلادرنگ محیط شهری با استفاده از فناوری وب حسگر. در مجموعه مقالات 2010 هجدهمین کنفرانس بین المللی ژئوانفورماتیک، پکن، چین، 18 تا 20 ژوئن 2010.
- رسچ، بی. میتل بوک، ام. ژیراردین، اف. بریتر، آر. Ratti, C. ادغام داده های هوشیاری زمین-حسگر در زمان واقعی برای نظارت بر محیط زیست در شهر. در مجموعه مقالات کنفرانس بین المللی سیستم های اطلاعات جغرافیایی پیشرفته و خدمات وب، کانکون، مکزیک، 1-7 فوریه 2009.
- رسچ، بی. میتل بوک، ام. لیپسون، اس. ولز، ام. برس، جی. بریتر، آر. راتی، سی. Blaschke, T. یکپارچه سنجش شهری: یک شبکه سنسور جغرافیایی برای نظارت بر سلامت عمومی و فراتر از آن . مطبوعات MIT: کمبریج، MA، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- ساگل، جی. بلاشکه، تی. بینات، ای. Resch، B. سنجش جغرافیایی همه جا حاضر برای تجزیه و تحلیل آگاه از زمینه: بررسی روابط بین پویایی محیطی و انسانی. Sensors 2012 , 12 , 9800–9822. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کلاگ، اچ. Kmoch، A. عملیاتی کردن شاخصهای محیطی برای تصمیمگیری چند منظوره و پشتیبانی عملی در زمان واقعی. Ecol. مدل. 2015 ، 295 ، 66-74. [ Google Scholar ] [ CrossRef ]
- لاوب، پی. داکهام، ام. Wolle، T. تشخیص الگوی حرکت غیرمتمرکز در میان گرههای ژئوسنسور متحرک. در مجموعه مقالات کنفرانس بین المللی علم اطلاعات جغرافیایی، پارک سیتی، UT، ایالات متحده آمریکا، 23-26 سپتامبر 2008. Springer: برلین/هایدلبرگ، آلمان، 2008. [ Google Scholar ]
- ویکلسکی، ام. Kays، R. Movebank: آرشیو، تجزیه و تحلیل و به اشتراک گذاری داده های حرکت حیوانات. در دسترس آنلاین: http://www.movebank.org (در 17 ژانویه 2017 قابل دسترسی است).
- کرانستاوبر، بی. کامرون، ای. واینزرل، آر. فواره، تی. تیلاک، س. ویکلسکی، ام. Kays, R. مدل داده Movebank برای ردیابی حیوانات. محیط زیست مدل. نرم افزار 2011 ، 26 ، 834-835. [ Google Scholar ] [ CrossRef ]
- دتکی، اچ. بروده، ام. کلگ، آی. گیلز، تی. هالگرن، جی. نظارت بر حیوانات از راه دور بیسیم (WRAM) – زیرساخت الکترونیکی پایگاهداده بینالمللی جدید برای مدیریت و اشتراکگذاری دادههای حسگر تلهمتری از ماهی و حیات وحش. در مجموعه مقالات هفتمین کنگره بین المللی مدلسازی و نرم افزار محیطی، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 15 تا 19 ژوئن 2014.
- Cagnacci، F. Urbano, F. مدیریت حیات وحش: یک سیستم اطلاعات مکانی برای داده های قلاده GPS. محیط زیست مدل. نرم افزار 2008 ، 23 ، 957-959. [ Google Scholar ] [ CrossRef ]
- اوربانو، اف. Cagnacci، F. کالنج، سی. دتکی، اچ. کامرون، ای. نتلر، ام. مدیریت داده ردیابی حیات وحش: چشم انداز جدید. فیلوس ترانس. R. Soc. B Biol. علمی 2010 ، 365 ، 2177-2185. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- داکهام، ام. Reitsma، F. شبیه سازی محیطی غیرمتمرکز و بازخورد در شبکه های ژئوسنسور قوی. محاسبه کنید. محیط زیست سیستم شهری 2009 ، 33 ، 256-268. [ Google Scholar ] [ CrossRef ]
- داکهام، ام. Yeoman, J. الگوریتم های غیرمتمرکز و شبیه سازی برای شناسایی و نظارت بر کاروان ها. در دسترس آنلاین: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.716.7594&rep=rep1&type=pdf (در تاریخ 17 ژانویه 2017 قابل دسترسی است).
- Darema، F. سیستم های برنامه های کاربردی مبتنی بر داده های دینامیکی: یک الگوی جدید برای شبیه سازی ها و اندازه گیری های کاربردی. در مجموعه مقالات علوم محاسباتی-ICCS 2004، کراکوف، لهستان، 6-9 ژوئن 2004. Springer: برلین/هایدلبرگ، آلمان، 2004; صص 662-669. [ Google Scholar ]
- Hu, X. شبیه سازی مبتنی بر داده پویا. SCS M&S Mag. 2011 ، 1 ، 16-22. [ Google Scholar ]
- آکچلیک، وی. بیروس، جی. دراگانسکو، آ. هیل، جی. غطاس، او. وااندرز، وارونگی مبتنی بر دادههای دینامیک BVB برای شبیهسازیهای مقیاس بزرگ: شناسایی بلادرنگ آلایندههای موجود در هوا. در مجموعه مقالات کنفرانس ACM/IEEE 2005 در مورد ابرکامپیوتر، سیاتل، WA، ایالات متحده آمریکا، 12-18 نوامبر 2005.
- گینور، ام. سلتزر، ام. مولتون، اس. Freedman, J. یک سیستم پشتیبانی تصمیم گیری پویا، مبتنی بر داده برای خدمات فوریت های پزشکی. در مجموعه مقالات علوم محاسباتی-ICCS 2005، آتلانتا، GA، ایالات متحده آمریکا، 22-25 مه 2005.
- چلیک، ن. لی، اس. واسودوان، ک. پسر، Y.-J. چارچوب شبیه سازی چند وفاداری مبتنی بر DDDAS برای سیستم های زنجیره تامین. IIE Trans. 2010 ، 42 ، 325-341. [ Google Scholar ] [ CrossRef ]
- Pereira، شبیه سازی چند عاملی مبتنی بر داده GM Dynamic. در مجموعه مقالات کنفرانس بین المللی IEEE/WIC/ACM در مورد فناوری عامل هوشمند، فرمونت، کالیفرنیا، ایالات متحده آمریکا، 2 تا 5 نوامبر 2007.
- لی، ز. گوان، ایکس. لی، آر. Wu, H. 4D-SAS: یک سیستم شبیهسازی و تحلیل مبتنی بر دادههای دینامیکی توزیعشده برای مدلسازی مبتنی بر عامل فضایی عظیم. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 42. [ Google Scholar ] [ CrossRef ]
- رای، اس. هو، X. تشخیص الگوی رفتار برای همسان سازی داده ها در شبیه سازی مبتنی بر عامل محیط های هوشمند. در مجموعه مقالات کنفرانس های مشترک بین المللی IEEE/WIC/ACM 2013 در زمینه هوش وب (WI) و فناوری های عامل هوشمند (IAT)، آتلانتا، GA، ایالات متحده آمریکا، 17-20 نوامبر 2013.
- تائورمینا، آر. چاو، K.-W. انتخاب متغیر ورودی مبتنی بر داده برای مدلسازی بارش-رواناب با استفاده از بهینهسازی ازدحام ذرات با کد دودویی و ماشینهای یادگیری شدید. جی هیدرول. 2015 ، 529 ، 1617-1632. [ Google Scholar ] [ CrossRef ]
- Wu، CL; Chau، KW; روشهای Li، YS برای بهبود عملکرد شبکه عصبی در پیشبینی جریانهای روزانه. جی هیدرول. 2009 ، 372 ، 80-93. [ Google Scholar ] [ CrossRef ]
- ژانگ، اچ. وروبیچیک، ی. لچفورد، جی. Lakkaraju، K. مدلسازی مبتنی بر عامل دادهمحور، با کاربرد در پذیرش خورشیدی پشت بام. Auton. Agents Multi-Agent Syst. 2016 ، 30 ، 1023-1049. [ Google Scholar ] [ CrossRef ]
- والنتین، جی. Oloo, F. چارچوب سنسور مدل برای پیشبینی پروازهای کبوتر خانگی در زمان واقعی. GI_Forum 2016 ، 1 ، 41–52. [ Google Scholar ] [ CrossRef ]
- مک لین، ای جی؛ سمنیوک، سی. مک درمید، جی جی; Marceau, DJ نقش مدلهای مبتنی بر عامل در اکولوژی و مدیریت حیات وحش. Ecol. مدل. 2011 ، 222 ، 1544-1556. [ Google Scholar ] [ CrossRef ]
- بنت، دی. تانگ، دبلیو. مدلسازی عوامل تطبیقی، آگاه از فضای و متحرک: مهاجرت الک در یلوستون. بین المللی جی. جئوگر. Inf. علمی 2006 ، 20 ، 1039-1066. [ Google Scholar ] [ CrossRef ]
- هامبلین، اس. Giraldeau, L.-A. یافتن قانون یادگیری پایدار تکاملی برای جست و جوی وابسته به فرکانس انیمیشن. رفتار 2009 ، 78 ، 1343-1350. [ Google Scholar ] [ CrossRef ]
- هامبلین، اس. در مورد استفاده عملی از الگوریتم های ژنتیک در بوم شناسی و تکامل. روش ها Ecol. تکامل. 2013 ، 4 ، 184-194. [ Google Scholar ] [ CrossRef ]
- اوکونیشی، تی. یاماناکا، ی. ایتو، اس.-آی. یک مدل شبیه سازی برای مهاجرت ساردین ژاپنی ( Sardinops melanostictus ) در غرب اقیانوس آرام شمالی. Ecol. مدل. 2009 ، 220 ، 462-479. [ Google Scholar ] [ CrossRef ]
- Kawecki، TJ; ایبرت، دی. مسائل مفهومی در سازگاری محلی. Ecol. Lett. 2004 ، 7 ، 1225-1241. [ Google Scholar ] [ CrossRef ]
- وکسلر، بی. Lea, SE سازگاری با یادگیری: اهمیت آن برای دامپروری مزرعه. Appl. انیمیشن. رفتار علمی 2007 ، 108 ، 197-214. [ Google Scholar ] [ CrossRef ]
- لاور، ام. ریدمیلر، ام. الگوریتمی برای یادگیری تقویتی توزیع شده در سیستم های چند عاملی مشارکتی. در مجموعه مقالات هفدهمین کنفرانس بین المللی یادگیری ماشین، استنفورد، کالیفرنیا، ایالات متحده آمریکا، 29 ژوئن تا 2 ژوئیه 2000.
- Macal، CM; North, MJ آموزش مدل سازی و شبیه سازی مبتنی بر عامل. جی. سیمول. 2010 ، 4 ، 151-162. [ Google Scholar ] [ CrossRef ]
- استوندال، اف. ویلنسکی، U. یافتن اشکال گله: جستجوی تکاملی در فضاهای پارامتر abm. در مجموعه مقالات کارگاه بین المللی سیستم های چند عاملی و شبیه سازی مبتنی بر عامل، تورنتو، ON، کانادا، 11 مه 2010. Springer: برلین/هایدلبرگ، آلمان، 2010. [ Google Scholar ]
- استوندال، اف. رند، WM چه زمانی داده های شبیه سازی شده با داده های واقعی مطابقت دارند؟ مقایسه توابع کالیبراسیون مدل با استفاده از الگوریتم ژنتیک ; مقاله پژوهشی مدرسه رابرت اچ اسمیت شماره RHS-06-151; دانشگاه مریلند: کالج پارک، MD، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- استوندال، اف. ویلنسکی، بررسی استحکام تکاملی U. در مدل آناسازی مصنوعی. در مجموعه مقالات سمپوزیوم پاییزی AAAI: سیستم های تطبیقی پیچیده، آرلینگتون، VA، ایالات متحده آمریکا، 11-13 نوامبر 2010.
- هلند، JH Complex Adaptive Systems ; Daedalus; انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 1992. [ Google Scholar ]
- هالند، سازگاری JH در سیستمهای طبیعی و مصنوعی: تحلیل مقدماتی با کاربردهای زیستشناسی، کنترل و هوش مصنوعی . انتشارات دانشگاه میشیگان: Ann Arbor، MI، ایالات متحده آمریکا، 1975. [ Google Scholar ]
- میچل، ام. الگوریتم های ژنتیک: یک مرور کلی. پیچیدگی 1995 ، 1 ، 31-39. [ Google Scholar ] [ CrossRef ]
- میچل، ام. مقدمه ای بر الگوریتم های ژنتیک . انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- کالوز، بی. Hutzler, G. تنظیم خودکار مدلهای مبتنی بر عامل با استفاده از الگوریتمهای ژنتیک. در مجموعه مقالات کارگاه بین المللی سیستم های چند عاملی و شبیه سازی مبتنی بر عامل، پاریس، فرانسه، 4-6 ژوئیه 2005. Springer: برلین/هایدلبرگ، آلمان، 2005. [ Google Scholar ]
- بارتا، ز. فلین، آر. Giraldeau, L.-A. هندسه برای یک گروه جستجوی خودخواه: یک رویکرد الگوریتم ژنتیک Proc. R. Soc. لندن. B Biol. علمی 1997 ، 264 ، 1233-1238. [ Google Scholar ] [ CrossRef ]
- Beauchamp, G. یک مدل فضایی از تولید و scrounging. انیمیشن. رفتار 2008 ، 76 ، 1935-1942. [ Google Scholar ] [ CrossRef ]
- اورملند، ام. Laubenbacher، R. بهینه سازی مدل های مبتنی بر عامل: روش های مقیاس بندی و الگوریتم های اکتشافی. جی آرتیف. Soc. Soc. شبیه سازی 2014 ، 17 ، 6. [ Google Scholar ] [ CrossRef ]
- مندل، جی. بیزلی، جی دی. بنتوم، LS; چاکرابورتی، اس. کوئن، جی ال. داگلاس، سی سی; هچر، جی. کیم، ام. Vodacek، A. یک مدل آتش سوزی وحشی مبتنی بر داده های پویا. در مجموعه مقالات کنفرانس بین المللی علوم محاسباتی، پکن، چین، 27-30 مارس 2007. Springer: برلین/هایدلبرگ، آلمان، 2007. [ Google Scholar ]
- رودریگز، آر. کورتس، آ. Margalef، T. تزریق دادههای بلادرنگ پویا به DDDAS برای پیشبینی رفتار آتشسوزی جنگل. در مجموعه مقالات کنفرانس بین المللی علوم محاسباتی، ونکوور، BC، کانادا، 29 تا 31 اوت 2009. Springer: برلین/هایدلبرگ، آلمان، 2009. [ Google Scholar ]
- دنهام، ام. کورتس، آ. مارگالف، تی. Luque, E. استفاده از الگوریتم ژنتیک مبتنی بر داده های دینامیکی برای بهبود پیش بینی گسترش آتش سوزی در جنگل. در مجموعه مقالات هشتمین کنفرانس بین المللی علوم محاسباتی، کراکوف، لهستان، 23 تا 25 ژوئن 2008. Bubak, M., van Albada, GD, Dongarra, J., Sloot, PMA, Eds. Springer: برلین/هایدلبرگ، آلمان، 2008; صص 36-45. [ Google Scholar ]
- لی، KH; چوی، ام جی; هونگ، Q. لی، جی. رفتار گروهی از ویدئو: رویکرد مبتنی بر داده برای شبیهسازی جمعیت. در مجموعه مقالات سمپوزیوم ACM SIGGRAPH/Eurographics 2007 در انیمیشن کامپیوتری، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 3 تا 4 اوت 2007.
- نگی، م. آکوس، ز. بیرو، دی. Vicsek, T. پویایی گروه سلسله مراتبی در گله های کبوتر. طبیعت 2010 ، 464 ، 890-893. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بلیزر، ن. دل اومو، جی. دل آریسیا، جی. وولفر، DP; لیپ، اچ پی آزمایش ناوبری شناختی در مناطق ناشناخته: کبوترهای خانگی اهداف مختلفی را انتخاب می کنند. J. Exp. Biol. 2013 ، 216 ، 3123-3131. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- سانتوس، سی دی; نوپرت، اس. لیپ، اچ.-پی. ویکلسکی، ام. Dechmann، DK سازگاری زمانی و زمینهای رهبری در گلههای کبوتر خانگی. PLoS ONE 2014 ، 9 ، e102771. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سانتوس، سی دی; نوپرت، اس. لیپ، اچ.-پی. ویکلسکی، ام. Dechmann, D. داده ها از: سازگاری زمانی و متنی رهبری در گله های کبوتر خانگی. در دسترس آنلاین: https://www.datarepository.movebank.org/handle/10255/move.365 (دسترسی در 10 اکتبر 2016).
- گریم، وی. برگر، یو. DeAngelis، DL; پولهیل، جی جی. گیسکه، جی. Railsback، SF پروتکل ODD: بررسی و اولین به روز رسانی. Ecol. مدل. 2010 ، 221 ، 2760-2768. [ Google Scholar ] [ CrossRef ]
- Wilensky، U. NetLogo (و راهنمای کاربر NetLogo) ; مرکز یادگیری متصل و مدلسازی مبتنی بر رایانه، دانشگاه نورث وسترن: ایوانستون، IL، ایالات متحده آمریکا، 1999. [ Google Scholar ]
- آروندل، جی. اولدروید، BP; Winter, S. مدلسازی جفتگیری ملکه زنبور عسل به عنوان معیاری برای تراکم کلونی وحشی. Ecol. مدل. 2012 ، 247 ، 48-57. [ Google Scholar ] [ CrossRef ]
- پولهیل، جی جی. پارکر، دی. براون، دی. Grimm, V. استفاده از پروتکل ODD برای توصیف سه مدل شبیهسازی اجتماعی مبتنی بر عامل تغییر کاربری زمین. جی آرتیف. Soc. Soc. شبیه سازی 2008 ، 11 ، 3. [ Google Scholar ]
- تانگ، دبلیو. بنت، DA مدل سازی حرکت حیوانات مبتنی بر عامل: یک بررسی. Geogr. Compass 2010 , 4 , 682-700. [ Google Scholar ] [ CrossRef ]
- رینولدز، گله های CW، گله ها و مدارس: یک مدل رفتاری توزیع شده. در ACM SIGGRAPH گرافیک کامپیوتری ; ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 1987. [ Google Scholar ]
- Wilensky، U. NetLogo Flocking Model ; مرکز یادگیری متصل و مدلسازی مبتنی بر رایانه، دانشگاه نورث وسترن: اوانستون، IL، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- میچل، ام تی; ویلنسکی، U. NetLogo رابی مدل ربات ; مرکز یادگیری متصل و مدلسازی مبتنی بر رایانه، دانشگاه نورث وسترن: اوانستون، IL، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- نوراینی، MR; Geraghty، J. عملکرد الگوریتم ژنتیک با استراتژی های مختلف انتخاب در حل TSP. در مجموعه مقالات کنگره جهانی مهندسی، لندن، انگلستان، 6 تا 8 ژوئیه 2011.
- گلدبرگ، دی. Deb، K. تجزیه و تحلیل مقایسه ای از طرح های انتخاب مورد استفاده در الگوریتم های ژنتیک. پیدا شد. ژنت الگوریتم ها 1991 ، 1 ، 69-93. [ Google Scholar ]
- والتر، WD; فیشر، جی دبلیو. باروخ موردو، اس. VerCauteren، KC روش مناسب برای تعیین محدوده خانگی یک حیوان با استفاده از سیستم های تله متری GPS پیشرفته امروزی چیست: مرحله اولیه ; InTech: Rijeka، کرواسی، 2011. [ Google Scholar ]
- داونز، جی. Horner، M. برآورد چگالی هسته مبتنی بر شبکه برای تجزیه و تحلیل محدوده خانه. در مجموعه مقالات نهمین کنفرانس بین المللی زمین محاسبات، Maynooth، ایرلند، 3-5 سپتامبر 2007.
- دل آریسیا، جی. دل اومو، جی. وولفر، DP; لیپ، اچ.-پی. پرواز گله باعث بهبود خانه نشینی کبوترها می شود: تجزیه و تحلیل مسیر GPS از پروازهای فردی در مقابل گروه های کوچک. انیمیشن. رفتار 2008 ، 76 ، 1165-1172. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گریم، وی. ریویلا، ای. برگر، یو. جلتش، اف. مویج، WM; Railsback، SF; Thulke، H.-H.; وینر، جی. ویگاند، تی. DeAngelis، DL مدلسازی الگو محور سیستمهای پیچیده مبتنی بر عامل: درسهایی از اکولوژی. Science 2005 ، 310 ، 987-991. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بیزلی، دی. مارتین، آر. بول، دی. مروری بر الگوریتم های ژنتیک: بخش 1. مبانی. دانشگاه محاسبه کنید. 1993 ، 15 ، 58. [ Google Scholar ]
- المحوب، TA; Hopgood، AA; نول، ال. Battersby، A. الگوریتم های ژنتیک ترکیبی: مروری. مهندس Lett. 2006 ، 13 ، 124-137. [ Google Scholar ]
- وندت، ک. کورتس، آ. مارگالف، تی. الگوریتم ژنتیک با هدایت دانش برای بهینهسازی پارامترهای ورودی در مدلسازی محیطی. Procedia Comput. علمی 2010 ، 1 ، 1367–1375. [ Google Scholar ] [ CrossRef ]
- وایتد، آر. Smallbone، LT یک الگوریتم ژنتیک ترکیبی با بهینه ساز محلی کالیبراسیون یک مدل اتوماتای سلولی تغییر پوشش گیاهی را بهبود می بخشد. بین المللی جی. جئوگر. Inf. علمی 2016 ، 1–21. [ Google Scholar ] [ CrossRef ]
- سجاد، م. سینگ، ک. پیک، ای. Ahn، C.-W. یک رویکرد داده محور برای مدل سازی مبتنی بر عامل: شبیه سازی پویایی تشکیل خانواده. جی آرتیف. Soc. Soc. شبیه سازی 2016 ، 19 ، 1-14. [ Google Scholar ] [ CrossRef ]
- وارد، JA; ایوانز، ای جی; Malleson، NS کالیبراسیون پویا مدلهای مبتنی بر عامل با استفاده از جذب دادهها. R. Soc. علوم را باز کنید. 2016 ، 3 ، 150703. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، جی.اس. فیلاتوا، تی. لیگمان-زیلینسکا، آ. حسنی محمودی، ب. استوندال، اف. Lorscheid، I. وینوف، آ. پولهیل، جی جی. سان، ز. پارکر، دی سی پیچیدگی های تحلیل خروجی مدل سازی مبتنی بر عامل. جی آرتیف. Soc. Soc. شبیه سازی 2015 ، 18 . [ Google Scholar ] [ CrossRef ]
- نیتل، اس. بررسی شبکههای ژئوسنسور: پیشرفتها در پایش محیطی پویا. Sensors 2009 , 9 , 5664-5678. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Gross, M. حرکات حیوانات تصویر بزرگتری را نشان می دهد. Curr. Biol. 2015 ، 25 ، R585–R588. [ Google Scholar ] [ CrossRef ] [ PubMed ]
شکل 1. نمودار جریان مراحل حیاتی در مدل شامل مقداردهی اولیه، ناوبری، گلهبندی و اجرای الگوریتم ژنتیک در مدل.

شکل 2. تصویری از ساختار یک کروموزوم کاندید. پارامترهای ناوبری و گله تشکیل دهنده به عنوان ژن های کروموزوم نشان داده می شوند.
شکل 3. توزیع چگالی پارامترهای مدل بهینه.
شکل 4. تغییر تناسب پارامترهای کاندید در طول اجرای مدل.
شکل 5. ( الف ) نقشه مسیرهای پرواز شبیه سازی شده و مشاهده شده (تاییدسنجی) کبوترهای ساکن. ( ب ) نقشه مسیرهای پرواز اعتبار سنجی که روی سطح چگالی هسته مکانهای مسیرهای شبیهسازیشده کبوتران ساکن پوشانده شدهاند.
شکل 6. حلقه ها در مسیرهای پرواز که توسط پارامترهای مدل بهینه سازی شده ( a ) بازتولید شده اند. حلقه ها همانطور که در داده های تجربی ( b ) ثبت شده است.
شکل 7. نمودارهای جعبه و سبیل متغیرهای حالت مشاهده شده و شبیه سازی شده شامل فاصله گام ( a ) و زاویه چرخش نسبی ( b ).
شکل 8. تغییرات سینوسی مسیرهای پرواز کبوترهای ساکن همانطور که در داده های تجربی مشاهده شده (سیاه) و شبیه سازی شده با استفاده از پارامترهای پرواز بهینه شده (خاکستری).

جدول 1. تعداد نقاط داده و تعداد پرندگان در هر پرواز خانگی تجربی.
جدول 2. مدل های فرعی فردی و اهداف آنها.
جدول 3. پارامترهای مدل.
جدول 4. میانگین پارامترهای دسته بندی و ناوبری که از مدل محاسبه شده است.
© 2017 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر