1. معرفی
رودخانه ها برای بقای انسان و توسعه پایدار حیاتی هستند و منابع انسانی ضروری مانند آب خانگی، آب کشاورزی، آب صنعتی، کشتیرانی و دشت های آبرفتی را فراهم می کنند. با این حال، تغییرات در شکل صفحه رودخانه که “تغییرات پلان شکل رودخانه” (RPCs) نامیده می شود، بر پایداری زندگی انسان، توسعه صنعتی، توسعه کشاورزی و امنیت مرزهای ملی تأثیر می گذارد. هر دو فعالیت های بیرونی و درونی انسان می توانند بر RPC ها تأثیر بگذارند. درک کامل مکانیسمی برای تشخیص RPCها به عنوان یک فرآیند جغرافیایی اساسی برای پیشبینی تغییرات رودخانهای که میتواند بر بقای انسان و توسعه پایدار تأثیر بگذارد، حیاتی است [ 1 ، 2 ، 3 ، 4 ، 5].
با استفاده از سنجش از دور (RS)، داده های جغرافیایی را می توان به سرعت در مناطق بزرگ با وضوح بالا به دست آورد. با استفاده از سیستم اطلاعات جغرافیایی (GIS)، مردم می توانند به سرعت حجم بالایی از داده های جغرافیایی به دست آمده از طریق RS را نمایش، پردازش و تجزیه و تحلیل کنند. هر دو RS و GIS به طور فزاینده ای برای شناسایی و تجزیه و تحلیل RPC ها استفاده می شوند [ 6 , 7 , 8 , 9 , 10 , 11 , 12 , 13 , 14 , 15]. برای تجزیه و تحلیل بهتر RPCها، برخی از اطلاعات کمکی مانند مدلهای رقومی ارتفاع (DEMs)، مناظر، و هندسهها برای تجزیه و تحلیل پلانفرمهای رودخانه استفاده شدهاند. لاو و فرانکلین (2013) از هندسه های بخش رودخانه به جای داده های ارتفاع جزئی غیرقابل اعتماد یا در دسترس برای تولید زمین القایی و شبکه کامل رودخانه بهره برداری کردند [ 16 ]. Mantilla و Gupta (2005) CUENCAS را که بر اساس DEMs است، برای درک شبکه های رودخانه پیشنهاد کردند [ 17 ]. Langhammer و Vilímek (2007) اثر تغییرات منظر ناشی از سیل را بر روی RPCs حوضه رودخانه Otava با استفاده از GIS، RS و کار میدانی مورد بررسی قرار دادند [ 18]]. Wohlfart و همکاران. (2016) ویژگیها و دینامیک پوشش زمین را بر اساس سری زمانی طیفسنج رادیومتر با وضوح متوسط با وضوح متوسط نوری (MODIS) شاخص گیاهی متفاوت (NDVI) برای کل حوضه رودخانه زرد تعیین کرد. تغییرات NDVI را می توان برای تجزیه و تحلیل تغییرات هیدرولوژیکی استفاده کرد [ 19 ]. این مطالعات قبلی – حتی با برخی اطلاعات کمکی – فقط بر روی RPCهای یک رودخانه واحد یا بر روی چندین رودخانه در یک منطقه خاص تمرکز داشتند، تغییرات را شناسایی کردند، دلایل اساسی را تجزیه و تحلیل کردند و اثرات آنها را بر انسان یا اشیاء دیگر توصیف کردند. نتایج آنها برای جوامع بشری مهم است. با این حال، این مطالعات روشی را برای تجزیه و تحلیل و طبقهبندی RPCها در حجم با در نظر گرفتن ویژگیهای آنها در مناطق بزرگ یا در سراسر جهان پیشنهاد نکردند.
عصر کلان داده فرا رسیده است (اگرچه هنوز هیچ تعریفی از کلان داده در بین همه محققین به توافق نرسیده است). با این حال، اعتقاد بر این است که ویژگیهای کلان داده – حجم زیاد، سرعت بالا، تنوع گسترده، و ارزش بسیار زیاد اما چگالی کم – به اصلاحاتی در پردازش داده نیاز دارند [20 ، 21 ، 22 ، 23 ، 24 ]]. محصولات پوشش زمین جهانی برای تجزیه و تحلیل تغییرات جهانی به روشی کمهزینه و زمانبر مهم هستند و چنین محصولاتی با وضوح فزایندهای در حال توسعه هستند. در همین حال، حجم داده ها همچنان در حال افزایش است. هنگامی که به یک سطح معین رسید، به عنوان داده های بزرگ GIS طبقه بندی می شود. بنابراین، توسعه روشی برای شناسایی و تجزیه و تحلیل RPC های مختلف بر اساس ویژگی های مشترک آنها ضروری است. مجموعه داده GlobeLand30 که بر اساس تصاویر نقشهبرداری موضوعی لندست (TM)، نقشهبردار موضوعی پیشرفته پلاس (ETM+) و عکسهای چندطیفی Huan Jing 1 (HJ-1) منتشر شده توسط چین در سال 2014 است، شامل بالاترین وضوح محصولات پوشش زمین جهانی موجود است. و برای به دست آوردن محصولات پوشش زمین جهانی در سال های 2000 و 2010 که شامل آب های با وضوح 30 متر است، استفاده شد. این محصولات به صورت رایگان در دسترس هستند و برای استفاده غیرتجاری در دسترس هستند. بنابراین، آنها می توانند به عنوان پایه ای برای تجزیه و تحلیل تغییرات جهانی عمل کنند.25 ، 26 ]. علاوه بر این، دقت GlobeLand30 توسط بسیاری از کاربران تایید شده است، و می توان از آن در اکثر مناطق زمین استفاده کرد [ 27 ، 28 ، 29 ، 30]]. بدنه های آبی 2000 و 2010 برای به دست آوردن RPC های اولیه عظیم از طریق تجزیه و تحلیل پوشش در مطالعه ما مناسب هستند. با این حال، پلان های رودخانه پویا هستند زیرا سطح رودخانه تغییر می کند. بنابراین، پلانهای رودخانه پویا موقتی هستند و نباید به عنوان پلانهای رودخانه واقعی در نظر گرفته شوند. به عبارت دیگر، تغییرات ناشی از سطوح غیر نرمال رودخانه را باید به عنوان RPCهای کاذب در نظر گرفت. روش رایج برای تشخیص RPC و تشخیص RPCهای کاذب، استفاده از یک DEM با دقت بالا مبتنی بر LiDAR در زمان های مختلف است. با این حال، این رویکرد در مقیاس جهانی پرهزینه است [ 31 ، 32 ، 33 ، 34 ، 35 ، 36]. کاربران می توانند RPC های مستقیم را بر اساس داده های RS و GIS مانند GlobeLand30 بدست آورند، اما تشخیص RPC های نادرست به طور خودکار از این داده ها به دلیل عدم وجود DEM در GlobeLand30 دشوار است.
روابط فضایی شامل روابط توپولوژیکی، روابط متریک و روابط نظم است و می تواند تجزیه و تحلیل هر دو RPC و RPC نادرست را افزایش دهد. به طور فزایندهای، مطالعاتی که به بررسی پلانفرمهای رودخانه میپردازند، روابط فضایی را در نظر گرفتهاند (Peršić و Horvatić (2011) [ 37 ]، Zhou و همکاران (2012) [ 38 ]، Schilling and Jacobson (2012) [ 39 ]، Hudson و همکاران (20). [ 40 ]، پان و همکاران (1999) [ 41 ]، هرناندز-گراسیداس و همکاران (2011) [ 42 ] و باکینگهام و ویتنی (2007) [ 43 ]]). با این حال، این مطالعات تنها یک یا چند رودخانه را در نظر گرفتند و بنابراین، روابط فضایی بین پلانهای رودخانهای رایج را بیان نکردند. پلانهای رودخانه معمولاً به صورت خطوط یا مناطق در GIS بیان میشوند. بنابراین، روابط فضایی بین پلانفرمهای رودخانه را باید بهعنوان روابط فضایی خطوط و مناطق در نظر گرفت. علاوه بر این، پلانهای رودخانه باید توسط خطوط و مناطق در اشکال سازمانیافته بیان شوند که میتوانند به عنوان مدلهایی در GIS نمایش داده شوند تا درک انسان و پردازش رایانه را تسهیل کنند. در این مقاله، با در نظر گرفتن ویژگیهای پلانفرم رودخانه، یک مکانیسم استدلالی ایجاد میکنیم که روابط توپولوژیکی و متریک را برای شناسایی و تجزیه و تحلیل مقادیر انبوه RPCها و تشخیص RPCهای کاذب ترکیب میکند.
بقیه این مقاله به شرح زیر سازماندهی شده است: در بخش 2 ، ما در مورد کارهای مرتبط در مورد روابط فضایی خطوط یا مناطق بحث می کنیم. در بخش 3 ، ما پلانهای رودخانه را رسمی کرده و مدلهای GIS آنها را میسازیم. در بخش 4 ، مکانیسم استدلال ترکیبی را برای RPC ها توضیح می دهیم. در نهایت، در بخش 5 ، چند نتیجه گیری می کنیم و کار آینده را مورد بحث قرار می دهیم.
2. آثار مرتبط
در این مقاله، ما از یک مکانیسم استدلال ترکیبی با روابط توپولوژیکی و متریک برای تجزیه و تحلیل RPCهای بیان شده به عنوان خطوط و مناطق استفاده کردیم. بنابراین، روابط توپولوژیکی و متریک و ترکیب آنها از خطوط و مناطق در مطالعه ما مهم است.
2.1. روابط توپولوژیکی خطوط و مناطق
روابط توپولوژیکی را می توان برای بررسی و تجزیه و تحلیل اطلاعات فضایی بین اشیاء مختلف برای یافتن مواردی که تحت تبدیل های توپولوژیکی مانند ترجمه، مقیاس بندی، چرخش و چولگی ثابت هستند، استفاده کرد. Egenhofer و Franzosa (1991) صرفاً بر اساس خواص توپولوژیکی، ساختاری را پیشنهاد کردند که روابط توپولوژیکی را در زمان نسبتاً اولیه تعیین شده توسط مدل های چهار تقاطع دو مجموعه تعریف می کند [ 44 ]. روابط توپولوژیکی اغلب برای پرس و جو و تجزیه و تحلیل روابط فضایی بین اشیاء ساده استفاده می شود [ 45 ، 46 ]، و مطالعات روابط توپولوژیکی متعددی برای تجزیه و تحلیل روابط فضایی خطوط یا مناطق انجام شده است [ 47 ، 48]]. برای تحلیل آسان روابط توپولوژیکی بین اشیاء ساده، محققان چند مدل توپولوژیکی تکاملی را بر اساس مدلهای چهار تقاطع پیشنهاد کردهاند. وانگ و همکاران (2014) مدل رابطه توپولوژیکی DTString را پیشنهاد کرد، که جزئیات کامل رابطه توپولوژیکی بین دو منطقه را با استفاده از یک رشته مرزی برای حل این مشکل ارائه کرد که روابط فضایی پیچیده را نمی توان با استفاده از مدل های موجود در حال حاضر متمایز کرد [49 ] . گائو و همکاران (2008) مدلی بر اساس توپولوژی نقطه-مجموعه برای نشان دادن روابط توپولوژیکی بین هندسه ها و خطوط جهت دار ایجاد کرد که می تواند به عنوان پایه ای برای توصیف معنایی خطوط در مقایسه با ویژگی های پس زمینه عمل کند [ 50]. با این حال، این مدل قادر به تفکیک جزئیات ناچیز در روابط توپولوژیکی نبود. لانگ و لی (2013) یک طبقهبندی رسمی و کامل برای روابط V9I بین انواع مختلف موجودات فضایی ایجاد کردند، که نشان میدهد مدل V9I، در واقع، گویاتر از آنچه قبلاً تصور میشد [51] است . بر و ناپولی (2003) روش جدیدی ارائه کردند که می تواند بازنمایی های فضایی کیفی را مدیریت کند و دلایل زیربنای روابط توپولوژیکی بر اساس شبکه های رابطه را روشن کند [ 52 ]. با این حال، در این مطالعات قبلی، روابط توپولوژیکی به خوبی برای حل روابط فضایی بین مناطق و خطوط ساده مفید بود، اما خطوط ساحلی رودخانه برای تجزیه و تحلیل با استفاده از روشهای موجود بسیار پیچیده بودند.
برای حل روابط توپولوژیکی بین اشیاء پیچیده، بسیاری از محققان روابط توپولوژیکی بین اشیاء پیچیده را بر اساس روابط توپولوژیکی بین اشیاء ساده مطالعه کرده اند. دنگ و همکاران (2007) یک روش چند لایه پیشنهاد کرد که می تواند روابط توپولوژیکی پیچیده بین مناطق را توصیف و تعیین کند [ 53 ]. Schneider و Behr (2005) تکنیک Proof-By-Constraint-And-Drawing را توسعه دادند، که انواع روابط توپولوژیکی انحصاری را بین انواع مختلف داده های فضایی پیچیده ایجاد کرد. آنها این روش را با استخراج 43 رابطه توپولوژیکی بین یک منطقه پیچیده و یک خط پیچیده نشان دادند [ 54]. رنز و همکاران (2000) این امکان را برای کاربران فراهم کرد که با کاهش جزئی محدودیتهای مربوط به اشکال مناطق، اقلام را گروهبندی کنند [ 55 ]. دو و همکاران (2010) روشهای جدیدی را برای استخراج و مدلسازی وابستگیهای روابط مقیاس توپولوژیکی بین مناطق و خطوط چند مقیاسی پیشنهاد کرد. این وابستگی های مقیاس برای استخراج روابط توپولوژیکی خطوط برای متمایز کردن پارتیشن ها استفاده شد [ 56 ]. اگرچه روابط فضایی پیچیده بین خطوط و مناطق را می توان در قالب روابط توپولوژیکی مانند روش های توسعه یافته در این مطالعات قبلی بیان کرد، توصیف روابط توپولوژیکی بین خطوط ساحل رودخانه با استفاده از پلانفرم های منحصر به فرد آنها دشوار است.
2.2. روابط متریک خطوط و مناطق
روابط متریک، که اغلب به عنوان مکمل های حیاتی روابط توپولوژیکی در نظر گرفته می شوند، می توانند بر اساس کمیت یا کیفیت به روابط جهت و فاصله تقسیم شوند. Guo و Du (2009) روشهای محاسباتی را برای استخراج روابط توپولوژیکی از روابط جهت ارائه کردند که می تواند اطلاعات توپولوژیکی را در مواردی که روابط توپولوژیکی در دسترس نیست تولید کند. انتظار می رفت این روش ها نتایج نسبتاً دقیقی را ارائه دهند [ 57 ]. وانگ (2014) مدل جدیدی به نام مدل شعاعی ارائه کرد که می توانست هم روابط جهت کیفی و هم کمی را مدیریت کند و بر اساس اصل پرتوهای منتقل شده به صورت خطوط مستقیم بود [ 58]]. دنگ و لی (2007) یک روش مدلسازی آماری را برای روابط جهتی اجسام فضایی پیشنهاد کردند که می تواند چنین رابطه ای را با دقت بیشتری نسبت به روش های قبلی توصیف کند، زیرا نیازی به تقریب اشیاء ندارد [59 ] . لین و همکاران (2013) یک نمودار خط مستقیم بدون جهت به نام نمودار دلونای محدود (CD) پیشنهاد کرد تا همسایگی فضایی و روابط همسایگی فضایی را با محدودیت های مانع و تسهیل کننده در دنیای واقعی نشان دهد [60 ] . با این حال، این مطالعات برای تجزیه و تحلیل روابط فضایی بین اشیاء حیاتی هستند، اما فقط خطوط یا مناطق عادی در نظر گرفته میشوند و بنابراین، برای تشخیص RPC مناسب نیستند.
2.3. روابط ترکیبی توپولوژیکی و متریک خطوط و مناطق
برای رفع کاستی های روابط توپولوژیکی و متریک، محققان روابط ترکیبی توپولوژیکی و متریک بین خطوط و مناطق را تجزیه و تحلیل کرده اند. دو و همکاران (2012) یک مثال کاربردی عمومی با استفاده از استدلال مبتنی بر مورد (CBR) برای مقابله با مشکلات جغرافیایی ارائه کرد. برای درک بهتر روابط فضایی، عنصر جدیدی از “محیط جغرافیایی” در مدل استاندارد نمایش موردی CBR [ 61 ] گنجانده شد. نداس و همکاران (2007) مدل 9 تقاطع را با تمرکز بر جزئیات متریک روابط بین خطوط از طریق تقسیم نسبت و اندازه گیری های نزدیکی گسترش داد، که می تواند به دستیابی به جزئیات بیشتر در مورد هندسه مقایسه ای و موقعیت اشیاء کمک کند [62] .]. Xu (2007) رویکردی را با استفاده از مقادیر کمی توسعه داد که در آن شاخصهای متریک و توپولوژیک هر دو میتوانند برای رسمی کردن بهتر محمولات فضایی زبان طبیعی در مقایسه با مواردی که فقط با استفاده از شاخصهای توپولوژیکی بهدست میآیند، استفاده شوند [63 ] . Legleiter (2014) مدل های زمین آماری را ارائه کرد که به جای ترجمه ساده مورفولوژی، به تغییرات از نظر شکل، اندازه و جهت گیری ویژگی های کانال حساس بودند. این نتایج اهمیت در نظر گرفتن اجزای عرضی و جریانی را به طور مشترک به جای منفرد برجسته می کند [ 64]. این مطالعات برای تشخیص تغییرات اجسام فضایی مفیدتر از روابط توپولوژیکی یا متریک جداگانه هستند. با این حال، یک روش هدفمند برای تشخیص تغییر در و تجزیه و تحلیل پلانهای رودخانه رایج قبلاً توسعه نیافته است. بنابراین، مدلهایی از پلانفرمهای رودخانه باید برای شناسایی RPCها با استفاده از استدلال ترکیبی بر اساس روابط توپولوژیکی و متریک ساخته شوند.
3. River Planforms و مدل های GIS آنها
پلانهای رودخانهای روی زمین به قدری پیچیده و متنوع هستند که هر رودخانه یک شکل پلانی منحصر به فرد دارد. با این حال، وجوه مشترکی در میان پلان های مختلف رودخانه وجود دارد. برای شناسایی RPCها، پلانهای رودخانه باید بر اساس ویژگیهای مشترکشان طبقهبندی شوند تا مدلهای GIS بسازند.
3.1. دو طبقه بندی معمولی پلانفرم های رودخانه
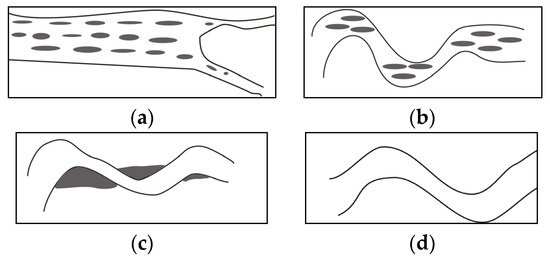
بریس (1983) و فولر (2007) دو طبقه بندی معمولی برای پلان های رودخانه ارائه کردند. همانطور که در شکل 1 نشان داده شده است، بریس پلان های رودخانه را به شکل کانالی سینوسی، نوار نقطه ای سینوسی، بافته سینوسی و غیر سینوسی طبقه بندی کرد، در حالی که فولر پلان های رودخانه را بر اساس درجات سینوسی، قیطان و انشعاب آنها طبقه بندی کرد، همانطور که در شکل 26،65 نشان داده شده است. ].
3.2. مدلهای GIS پلانفرمهای رودخانه
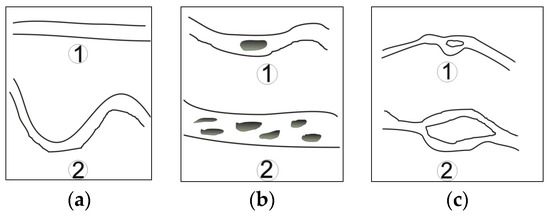
با این حال، استفاده از این دو سیستم طبقهبندی معمولی برای پلانفرمهای رودخانه برای نشان دادن تمام پلانفرمهای رودخانه روی زمین دشوار است. با در نظر گرفتن این طبقهبندیهای معمولی و با در نظر گرفتن پلانهای رودخانهای که در طبیعت یافت میشوند، ما پلانهای رودخانهای را به غیرسینوسی ساده (غیر سینوسی بدون قیطان یا انشعاب)، سینوسی بافته شده، غیرسینوسی انشعابدار، سینوسی ساده (سینوس بدون قیطان یا انشعاب)، سینوسی و سینوسی طبقهبندی کردیم. پلان های منشعب سینوسی. در این مقاله از خطوط و نواحی برای بیان پلانفرمهای رودخانه در GIS استفاده کردیم: خطوط کرانه با خطوط، در حالی که قیطانها یا انشعابها توسط مناطق بیان میشوند. برای تکمیل پلان های طبقه بندی شده رودخانه ما، دو شرط خاص باید در نظر گرفته شود: اولین شرط این است که تمایز بین braiding و anabranchings دشوار است که هر دو توسط مناطق در GIS بیان می شوند. دومین شرط ویژه این است که وقتی عرض یک رودخانه خیلی کوچک است که نمیتوان آن را با خطوط دوتایی یا علامت تجاری در مقیاس مشخص در GIS بیان کرد، شکل پلان رودخانه باید با یک خط بیان شود. بر اساس دو طبقه بندی معمولی پلان رودخانه و دو شرایط ویژه ارائه شده در بالا، پلان های رودخانه را می توان با استفاده از پنج نوع مدل GIS بیان کرد – یک خط، دو خط، دو خط با یک منطقه داخلی، دو خط با چندین منطقه داخلی، و سه یا سه یا خطوط بیشتر با چندین منطقه – همانطور که در نشان داده شده است دومین شرط ویژه این است که وقتی عرض یک رودخانه خیلی کوچک است که نمیتوان آن را با خطوط دوتایی یا علامت تجاری در مقیاس مشخص در GIS بیان کرد، شکل پلان رودخانه باید با یک خط بیان شود. بر اساس دو طبقه بندی معمولی پلان رودخانه و دو شرایط ویژه ارائه شده در بالا، پلان های رودخانه را می توان با استفاده از پنج نوع مدل GIS بیان کرد – یک خط، دو خط، دو خط با یک منطقه داخلی، دو خط با چندین منطقه داخلی، و سه یا سه یا خطوط بیشتر با چندین منطقه – همانطور که در نشان داده شده است دومین شرط ویژه این است که وقتی عرض یک رودخانه خیلی کوچک است که نمیتوان آن را با خطوط دوتایی یا علامت تجاری در مقیاس مشخص در GIS بیان کرد، شکل پلان رودخانه باید با یک خط بیان شود. بر اساس دو طبقه بندی معمولی پلان رودخانه و دو شرایط ویژه ارائه شده در بالا، پلان های رودخانه را می توان با استفاده از پنج نوع مدل GIS بیان کرد – یک خط، دو خط، دو خط با یک منطقه داخلی، دو خط با چندین منطقه داخلی، و سه یا سه یا خطوط بیشتر با چندین منطقه – همانطور که در نشان داده شده استشکل 3 . شکل 3 a یک پلان رودخانه را با عرض آنقدر کوچک نشان می دهد که باید با یک خط بیان شود. شکل 3 ب، پلانفرمهای سینوسی ساده و غیر سینوسی را نشان میدهد که با استفاده از مدل دو خطی بیان شدهاند. شکل 3 ج مدلی را با خطوط دوتایی حاوی یک ناحیه نشان می دهد که برای بیان پلانفرم های غیر سینوسی و سینوسی با یک میله مرکزی استفاده می شود. شکل 3 d، پلانهای بافته یا غیرشاخهای غیرسینوسی و سینوسی را نشان میدهد که به صورت خطوط دوتایی با چندین ناحیه بیان میشوند. در نهایت، شکل 3e سه یا چند خط را با چندین ناحیه نشان میدهد که برای به تصویر کشیدن پلانفرمهای بافته یا غیرشاخهای پیچیده غیرسینوسی و سینوسی استفاده میشود. خطوط از دو نقطه پایانی (نقطه شروع [SP] و نقطه پایان [EP]) و یک داخلی، و مناطق از یک مرز (H-boundary) و یک داخلی (H-interior) تشکیل شده اند.
3.3. مدلهای GIS ساده پلانفرمهای رودخانه
برای تکمیل مدلهای GIS پلانفرمهای رودخانه، از خطوط مستقیم به جای خطوط مشترک برای تسهیل درک انسان و تحلیل محاسباتی استفاده کردیم. این انتخاب بر روابط توپولوژیکی پلانفرمهای رودخانه تأثیری نداشت. علاوه بر این، پلانفرمهای غیرسینوسی و سینوسی پیچیده که با سه یا چند خط با چندین ناحیه بیان میشوند را میتوان به چندین مدل سادهتر GIS دیگر، مانند مدل دو خطی و مدل یک منطقهای دو خطی، تقسیم کرد. از این رو، ما این مدل را در مدلهای پلان فرم رودخانه GIS ساده (SGRPMs) لحاظ نکردیم. SGRPM ها که شامل مدل های تک خط مستقیم (SSL) (SSLM)، مدل های دو خط مستقیم (DSL) (DSLM)، مدل های DSL یک منطقه ای (DSL-1RMs) و مدل های DSL چند منطقه ای (DSL-SRMs) هستند. در شکل 4 نشان داده شده اند. DSL-SRM ها را می توان به عنوان یکپارچه ترین مدل های SGRPM در نظر گرفت (برای بیان ساده DSL-SRM، از دو ناحیه استفاده می کنیم که چندین منطقه متعلق به آنها را نشان می دهد). وقتی نواحی به یکی تبدیل میشوند، تبدیل به DSL-1RM میشوند و وقتی ناحیهها ناپدید میشوند، تبدیل به DSLM میشوند – به عبارت دیگر، DSLM را میتوان به عنوان یک DSL با مجموعه خالی (برای منطقه ناپدید شده) در نظر گرفت. هنگامی که عرض رودخانه خیلی کوچک است که نمی توان به تصویر کشیده شود، DSLM ها تبدیل به SSLM می شوند – به عبارت دیگر، SSLM ها ساده ترین هستند، و یک SSLM باید به عنوان یک DSLM خاص در نظر گرفته شود که شامل یک SSL و یک مجموعه خالی (برای SSL دیگر) با یک مجموعه خالی (برای منطقه ناپدید شده). شکل 4 a-d به ترتیب SSLM، DSLM، DSL-1RM و DSL-SRM را نشان می دهد.
4. مکانیسم استدلال ترکیبی برای RPC
RPC ها را می توان بر اساس روابط فضایی آنها بیان کرد، اما تشخیص RPC ها تنها از نظر روابط توپولوژیکی یا متریک آنها دشوار است. در این مقاله، روابط فضایی بین پلانفرمهای رودخانه یا SGRPM از روابط توپولوژیکی و متریک و ترکیب آنها برای بیان کامل RPCها تشکیل شده است. روابط فضایی بین SGRPM ها پایه و اساس روابط فضایی بین پلانفرم های رودخانه را تشکیل می دهند و پلان های پیچیده رودخانه با ترکیب چندین SGRPM بیان می شوند. بر اساس ویژگیها و بیانهای GIS پلانفرمهای رودخانه، قوانین تقسیمبندی را پیشنهاد کردهایم که میتوان از آنها برای تقسیم کل پلانفرم رودخانه به چندین SGRPM استفاده کرد و بنابراین، روابط فضایی بین پلانفرمهای رودخانه را آسانتر تحلیل کرد و RPCها را توصیف کرد.
4.1. روابط فضایی بین SGRPM ها
رابطه فضایی بین یک SSLM در زمان 1 و یک DSLM در زمان 2 متفاوت از رابطه بین یک DSLM در زمان 1 و یک SSLM در زمان 2 است. با این حال، مکانیسمهای استدلالی، که بر اساس روابط فضایی مربوط به رودخانه تغییر یافته حاصل است. پلانفرم ها، به همان شکل باقی می مانند. از این رو، این دو نوع روابط فضایی را معادل در نظر گرفتیم. بر اساس تجزیه و تحلیل ارائه شده در بالا، ما روابط فضایی را به چند نوع تقسیم کردیم، همانطور که در جدول 1 نشان داده شده است .
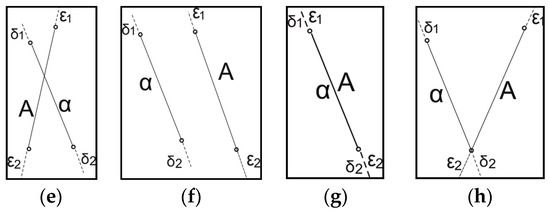
قبل از تجزیه و تحلیل روابط توپولوژیکی بین SGRPMها، آنهایی که احتمال کمی دارند و بعید است که نماینده باشند باید کنار گذاشته شوند تا روابط باقیمانده ساده و موثر باشند. از آنجایی که پلانهای رودخانه پویا هستند و خطوط ساحلی همیشه پیوسته هستند، روابط توپولوژیکی بین خطوط ساحلی باید به عنوان روابط توپولوژیکی بین خطوط مستقیم در نظر گرفته شود که میتواند تا حدودی گسترش یا کوتاه شود. به عبارت دیگر، روابط توپولوژیکی بین خطوط مستقیم بانکی در صورتی که طول خطوط تا حد معینی تغییر کند، تغییر نخواهد کرد. ما یک رابطه توپولوژیکی واقعی بین خطوط مستقیم را به عنوان رابطه ای تعریف کردیم که با افزایش یا کوتاه شدن خطوط به مقدار دلخواه خود تغییری نمی کند. در مقابل، روابطی که تغییر می کنند، روابط فضایی کاذب نامیده می شوند.شکل 5 a رابطه توپولوژیکی بین خط مستقیم A در زمان 1 و خط مستقیم را نشان می دهد. α�در زمان 2 زمانی که خط مستقیم A به مقدار دلخواه کمی کوتاه می شود، مانند ε1�1و ε2�2، بر اساس دو نقطه پایانی و خط مستقیم α � به اندازه خط مستقیم A تغییر می کند ( δ1�1و δ2 �2، به ترتیب). شکل 5 ب-د وضعیت مشابه شکل 5 الف را نشان می دهد. شکل 5 رابطه توپولوژیکی بین خط مستقیم A و خط مستقیم را نشان می دهد α�هنگامی که خط مستقیم A به مقدار دلخواه کمی بر اساس دو نقطه پایانی و خط مستقیم گسترش می یابد α�به اندازه خط مستقیم A تغییر می کند. شکل 5 f–h وضعیت مشابه شکل 5 e را نشان می دهد. روابط توپولوژیکی نشان داده شده در شکل 5 a,e یکسان است و پس از کوتاه شدن یا گسترش یکسان باقی می ماند. ما این نوع رابطه توپولوژیکی را رابطه توپولوژیکی واقعی بین SGRPM می نامیم. با همان استدلال، روابط توپولوژیکی نشان داده شده در شکل 5 b,f را روابط توپولوژیکی واقعی می نامیم و شکل 5 c,g همان شکل 5b ,f است. در مقابل، اگرچه روابط توپولوژیکی نشان داده شده در شکل 5d,h یکسان هستند، زیرا آنها پس از کوتاه شدن یا گسترش به دو نوع مختلف روابط فضایی متمایز می شوند، روابط توپولوژیکی نادرستی را بین SGRPM ها ارائه می دهند و در این مقاله آنها را از روابط توپولوژیکی بین SGRPM حذف می کنیم. علاوه بر این، شکل 5 فقط روابط توپولوژیکی بین SSL ها را در زمان های مختلف نشان می دهد. توجه به این نکته ضروری است که یک خط مستقیم را می توان مدلی از یک خط بانکی از DSLM در نظر گرفت. با این حال، روابط توپولوژیکی بین دو DSL در زمانهای مختلف باید با قانون مشابهی مطابقت داشته باشد، همانطور که در بالا برای SSLها بیان شد.
4.1.1. روابط توپولوژیکی بین SGRPM ها
روابط توپولوژیکی بین SGRPMها باید به صورت روابط توپولوژیکی بین DSLها و بین مناطق آنها بیان شود. ما یک مدل 4 تقاطع DSL (DSL4IM) را بر اساس چهار تقاطع ممکن فضای داخلی پیشنهاد کردیم. آoآo، بoBo) از DSL در زمان 1 با اجزای متناظر DSL در زمان 2 برای بیان روابط توپولوژیکی بین دو DSL از SGRPM در زمان های مختلف. DSL4IM که روابط توپولوژیکی بین خط مستقیم A (راست) و خط مستقیم B (چپ) را در زمان 1 و خط مستقیم بیان می کند. α�(راست) و خط مستقیم β�(سمت چپ) در زمان 2، با یک مقدار دودویی (خالی (0)، غیر خالی (1)) از مجموعه تقاطع های داخلی A و داخلی B با α�فضای داخلی و β�داخلی (معادله (1)). به طور خاص، DSL4IM بین دو SSLM را می توان به عنوان محل تلاقی فضای داخلی A و یک مجموعه خالی با α�فضای داخلی و یک مجموعه خالی:
روابط توپولوژیکی بین مناطق شرایط تکمیلی مهمی هستند که روابط توپولوژیکی بین دو DSL (یا SSL) برای تمایز بین RPCهای درست و نادرست کافی نباشد. ما از مدل تقاطع و تفاوت (IDM) پیشنهاد شده توسط دنگ و همکاران استفاده کردیم. (2007) [ 53 ] برای بیان روابط توپولوژیکی بین مناطق. این مدل می تواند روابط توپولوژیکی بین یک منطقه و یک مجموعه خالی را با دقت بیشتری نسبت به مدل های دیگر توصیف کند. روابط توپولوژیکی بین مناطق بر اساس IDM را می توان با رابطه (2) نشان داد:
جایی که اچoمن∩اچo1اچمنo∩اچ1oو ∂اچمن∩ ∂اچ1∂اچمن∩∂اچ1نشان دهنده تقاطع بین اچ1‘ sاچ1‘سداخلی ( اچoمناچمنo) و اچ1‘ sاچ1‘سداخلی ( اچo1اچ1o) و بین اچ1‘ sاچ1‘سمرز ( ∂اچمن∂اچمن) و اچ1‘ sاچ1‘سمرز ( ∂اچ1∂اچ1)، به ترتیب؛ و اچمن–اچ1 اچمن–اچ1 و اچ1–اچمناچ1–اچمننشان دهنده تفاوت بین مناطق است اچمناچمن(محدود به الف و ب) و اچ1اچ1(محدود شده توسط α�و β�). ما میتوانیم اینها را با استفاده از یک مدل معمولی توصیف کنیم، زمانی که تغییرات فقط با روابط توپولوژیکی بین دو DSL قابل شناسایی باشد. علاوه بر این، زمانی که تغییرات تنها با استفاده از روابط توپولوژیکی بین دو DSL ثابت نشده باشند، می توان آنها را به طور کامل توصیف کرد. با این حال، روابط توپولوژیکی بین یک یا چند جفت منطقه باید با یک یا چند ماتریس رابطه توپولوژیکی بیان شود.
روابط توپولوژیکی بین DSLها (یا SSLها) و مناطق در این مقاله توضیح داده نشده است زیرا آنها پیچیده و غیر ضروری هستند. علاوه بر این، روابط توپولوژیکی بین DSLها و بین مناطق برای به تصویر کشیدن RPCها کافی است.
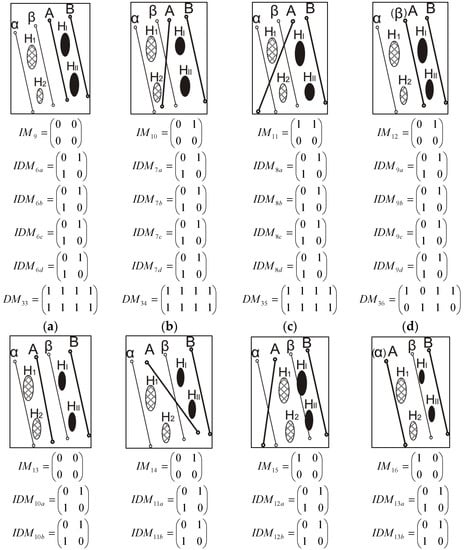
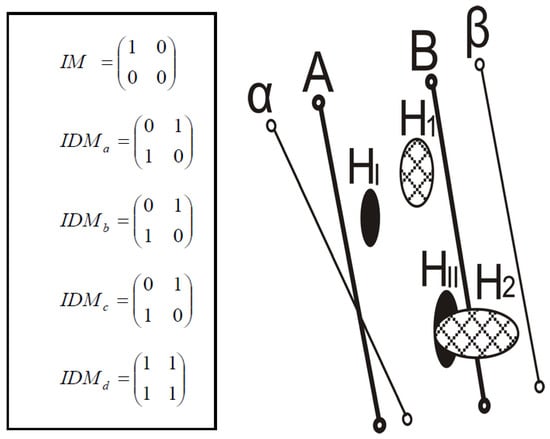
از آنجایی که DSL-SRM یکپارچه ترین مدل SGRPM ها است، تمام روابط توپولوژیکی بین SGRPM ها را می توان بین DSL-SRM ها یا DSL-SRM های تغییر یافته در نظر گرفت. در این مقاله، هر رابطه توپولوژیکی بین دو DSL-SRM توسط یک DSL4IM (IM) و چهار IDM ناحیه بیان شده است. برای سادهتر کردن درک این مفهوم، یک رابطه توپولوژیکی معمولی بین دو DSL-SRM و ماتریسهای آنها را توصیف میکنیم (IM برای DSL4IM. IDMآIDMآ، IDMآIDMآ، IDMجIDMجو IDMدIDMدبرای IDM مناطق؛ IDMآIDMآدر رابطه با اچمناچمنو اچ1اچ1، IDMبIDMبدر رابطه با اچمناچمنو اچ2اچ2; IDMجIDMجدر رابطه با اچIIاچIIو اچ1اچ1; و IDMدIDMددر رابطه با اچIIاچIIو اچ2اچ2) در شکل 6 نشان داده شده است .
هنگامی که روابط توپولوژیکی بین DSL-1RM و DSL-SRM تغییر می کند، یک IM و دو IDM وجود خواهد داشت ( IDMآIDMآو IDMبIDMب) هنگامی که روابط توپولوژیکی بین DSL-1RM و DSL-1RM تغییر می کند، روی IM و یک IDM وجود خواهد داشت ( IDMآIDMآ) هنگامی که روابط توپولوژیکی بین DSLM و DSL-SRM تغییر می کند، یک IM و دو IDM وجود خواهد داشت ( IDMآIDMآو IDMبIDMب، بیان یک مجموعه خالی با اچ1اچ1و یک مجموعه خالی با اچ2اچ2) وقتی بین SSLM و DSL-SRM، یک IM و دو IDM وجود خواهد داشت (( IDMآIDMآو IDMبIDMب، بیان یک مجموعه خالی با اچ1اچ1و یک مجموعه خالی با اچ2اچ2) و غیره. در نهایت، روابط توپولوژیکی بین SSLM و SSLM تغییر می کند، تنها یک DSL4IM وجود خواهد داشت.
4.1.2. روابط متریک بین SGRPM ها
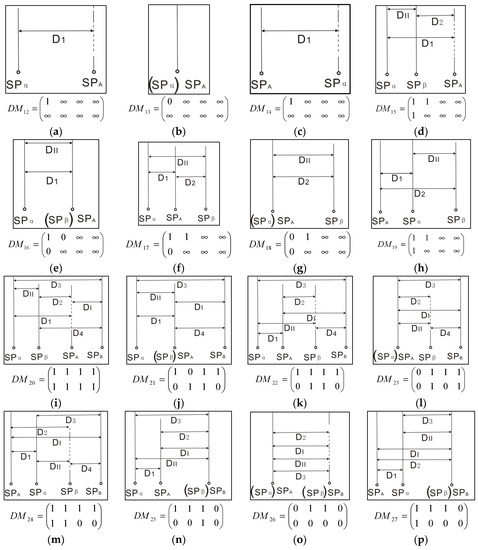
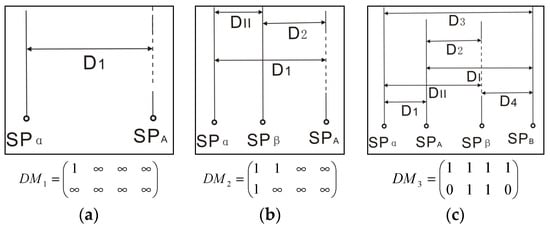
ما یک مدل 8 فاصله دو نقطه شروع (DS8DM) پیشنهاد می کنیم که روابط متریک بین DSL A و B و بین DSL را بیان می کند. α�و β � که با سه مقدار فاصله مشخص می شود (0، 1، ∞∞): بین SP A و B و SP بین α�SP و β �SP (معادله (3)):
جایی که
-
D1D1فاصله بین SP A است ( SPآSPآ) و α �SP ( SPαSP�)
-
D2D2فاصله بین SP A است ( SPآSPآ) و β�SP ( SPβSP�)
-
D3D3فاصله بین SP B است ( SPبSPب) و α�SP ( SPαSP�)
-
D4D4فاصله بین SP B است ( SPبSPب) و β�SP ( SPβSP�)
-
DمنDمنفاصله بین SP A است ( SPآSPآ) و B’s SP ( SPبSPب) و
-
DIIDIIفاصله بین است α �SP ( SPαSP�) و β �SP ( SPβSP�):
-
DD1=D1+D2–DIIDD1=D1+D2–DII;
-
DD2=D3+D4–DIIDD2=D3+D4–DII;
-
DD3=D1+D3–DمنDD3=D1+D3–Dمن; و
-
DD4=D2+D4–DمنDD4=D2+D4–Dمن.
علاوه بر این، مقدار فاصله (0) نشان می دهد که فاصله 0 است، فاصله بین یک SP و یک مجموعه خالی به صورت تعریف شده است. ∞∞، و مقدار فاصله (1) نشان می دهد که فاصله 0 نیست و ∞∞. سپس، مقادیر نشان دهنده DS8DM را می توان به صورت زیر توصیف کرد:
اگر مقادیر D1D1، D2D2، D3D3، و D4D40 هستند، سپس دو SP برابر هستند.
اگر مقادیر D1D1، D2D2، D3D3، و D4D41 هستند، سپس دو SP از هم جدا هستند.
اگر مقادیر D1D1، D2D2، D3D3، و D4D4هستند ∞∞، پس حداقل یک SP وجود ندارد و مقادیر عناصر مربوطه مانند DD1DD1، DD2DD2، DD3DD3، و DD4DD4نباید محاسبه شود. یعنی اگر ارزش D1D1است ∞∞، DD1DD1و DD3DD3نباید محاسبه شود؛ در عوض، آنها باید فقط به عنوان تعریف شوند ∞∞.
اگر ارزش از DD1DD1پس 0 است SPآSPآبین است SPαSP�و SPβSP�، یا SPآSPآبرابر است SPαSP�یا SPβSP�. اگر ارزش از DD1DD1پس 1 است SPآSPآبیرون است SPαSP�و SPβSP�.
اگر ارزش از DD2DD2پس 0 است SPبSPببین است SPαSP�و SPβSP�، و اگر ارزش DD2DD2پس 1 است SPبSPببیرون است SPαSP�و SPβSP�.
اگر ارزش از DD3DD3پس 0 است SPαSP�بین است SPآSPآو SPبSPب، و اگر ارزش DD3DD3پس 1 است SPαSP�بیرون است SPآSPآو SPبSPب.
اگر ارزش از DD4DD4پس 0 است SPβSP�بین است SPآSPآو SPبSPب، و اگر ارزش DD4DD4پس 1 است SPβSP�بیرون است SPآSPآو SPبSPب.
تمام DS8DM های SGRPM ها را می توان به سه نوع طبقه بندی کرد که SSL ها را در زمان 1 و SSL ها در زمان 2، SSL ها در زمان 1 و DSL ها در زمان 2، و DSL ها در زمان 1 و DSL ها در زمان 2 را توصیف می کنند. DS8DM های DSL ها در زمان 1 و DSL ها در زمان 2 را می توان یکپارچه ترین انواع در نظر گرفت، در حالی که دو نوع دیگر را می توان به عنوان DS8DM های DSL های تغییر یافته در زمان 1 و DSL های تغییر یافته در زمان 2 در نظر گرفت. ما DS8DM ها را با سه وضعیت معمول بیان می کنیم: بین دو SSL ( شکل 7 الف)، بین یک SSL و یک DSL ( شکل 7 ب)، و بین دو DSL ( شکل 7 ج).
برای درک کامل روابط متریک بین SGRPM ها، ما تمام 21 DS8DM را در شکل A1 در پیوست A فهرست می کنیم .
4.1.3. مکانیسم استدلال ترکیبی با روابط توپولوژیکی و متریک بین SGRPM ها
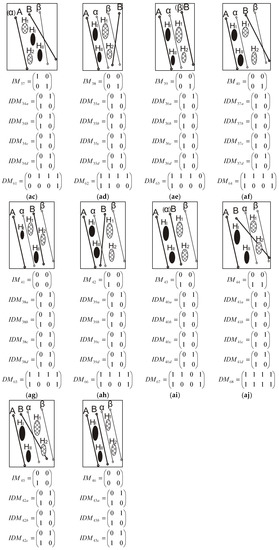
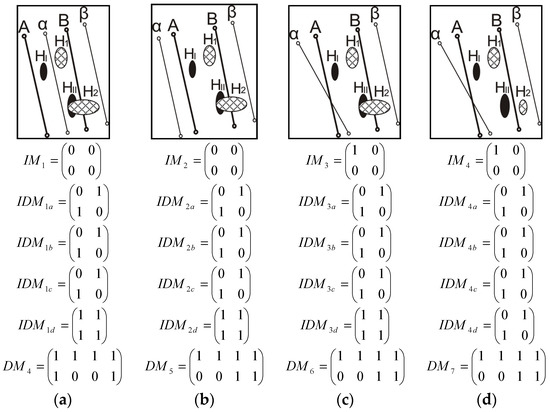
به دلیل محدودیتهای بیان تغییر بین SGRPM با استفاده از روابط توپولوژیکی یا متریک، ما یک مکانیسم استدلال ترکیبی شامل روابط توپولوژیکی و متریک را پیشنهاد میکنیم. این ترکیب شامل ماتریس های DSL4IM و IDM مناطق و DS8DM می باشد. برای بیان کامل مکانیسم استدلال ترکیبی، ما چهار موقعیت مشابه بین SGRPM ها را پیشنهاد می کنیم (که به راحتی اشتباه می شوند) تا توضیح دهیم که چگونه برای تشخیص تغییرات مختلف کار می کند. برای تمایز بین وضعیت اول ( شکل 8 الف) و موقعیت دوم ( شکل 8 ب)، که دارای DSL4IM و IDM یکسان هستند، DS8DM حیاتی است. برای تمایز بین وضعیت دوم ( شکل 8 ب) و موقعیت سوم ( شکل 8ج)، که دارای DS8DM و IDM یکسان هستند، DSL4IM بسیار مهم است. برای تمایز بین وضعیت سوم ( شکل 8 ج) و موقعیت چهارم ( شکل 8 د)، که دارای همان DSL4IM و IDM هستند، DS8DM ها بسیار مهم هستند. بر اساس این ماتریس های استدلال ترکیبی، ما می توانیم انواع مختلف تغییرات را بین SGRPM ها به جز تغییرات بین کل مهاجرت های چپ و کل مهاجرت های راست، که منجر به ماتریس های یکسان می شود، تشخیص دهیم، همانطور که در شکل 9 نشان داده شده است . با این حال، این چهار موقعیت مشابه همه موقعیتهای بین مهاجرتهای کل چپ و مهاجرت کل به راست را شامل نمیشوند. از آنجایی که IDMها در این شرایط بی فایده هستند، RPCها با موقعیت های خط بانکی یکسان – همانطور که در شکل 9 نشان داده شده است.– همه تغییرات واقعی هستند و می توان آنها را بر اساس زمینه بیشتر متمایز کرد. از این رو، با استفاده از مکانیسم استدلال ترکیبی، میتوانیم اکثر تغییرات نادرست ناشی از گشاد یا باریک شدن خطوط کرانه را حذف کنیم ( شکل 8 b احتمالاً یک تغییر نادرست است که ناشی از گشاد شدن خطوط بانکی از زمان 1 به زمان 2 است).
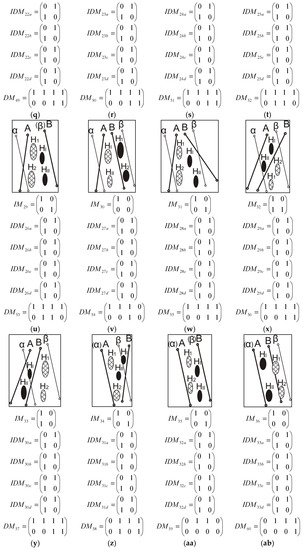
برای درک کامل مکانیسم استدلال ترکیبی، روابط توپولوژیکی و متریک ترکیبی بین SGRPM ها مورد نیاز است. به طور خاص، موارد بین DSL-SRM ضروری هستند. با توجه به اینکه IDM ها بین دو منطقه هشت نوع هستند (جدا، ملاقات، همپوشانی، پوشش، حاوی، پوشانده شده توسط، محتوی توسط و برابر) [53]، فهرست کردن همه موقعیت ها بسیار پیچیده است. در نتیجه، شکل A2 در پیوست A فقط 38 رابطه معمولی بین دو DSL-SRM را فهرست می کند که تنها یک رابطه توپولوژیکی معمولی را بین مناطق بیان می کند.
4.2. قوانین تقسیم بندی برای پلان های رودخانه ای
پلانهای معمول رودخانه همیشه بسیار پیچیدهتر از آن هستند که با یک SGRPM بیان شوند. از این رو، لازم است که پلان های رودخانه رایج را به چندین SGRPM تقسیم کنیم. ما سه قانون تقسیم بندی را برای تقسیم بندی یک پلان رودخانه مشترک به چندین SGRPM پیشنهاد کردیم که به شرح زیر است.
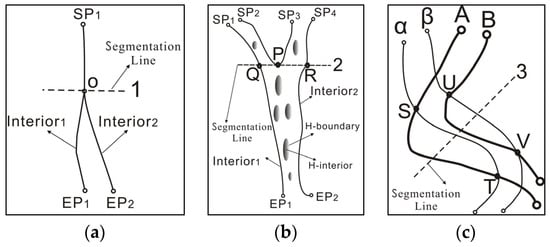
قانون تقسیم بندی 1: اگر شکل پلان رودخانه از SSLM به DSLM تغییر کند، یا برعکس، توسط خط تقسیم بندی 1 که از نقطه تغییر O می گذرد، تقسیم می شود ( شکل 10 a). بنابراین، شکل پلان رودخانه به یک DSLM و یک SSLM تقسیم خواهد شد.
قانون تقسیم 2: اگر خطوط ساحلی یک پلان رودخانه از خط دوتایی به سه خط یا بیشتر تغییر کند، یا بالعکس، با خط تقسیم 2 که از نقطه تغییر P می گذرد، یک نقطه داخلی دلخواه Q برای خط راست و یک نقطه داخلی دلخواه R برای خط چپ ( شکل 10 ب). بنابراین، شکل پلان رودخانه به DSLM، DSL-1RM و DSL-SRM تقسیم می شود.
قانون تقسیم بندی 3: اگر یک پلان رودخانه در زمان 1 با یک پلان رودخانه در زمان 2 تلاقی کند و دو یا چند نقطه تقاطع بین هر یک از خطوط ساحلی وجود داشته باشد، توسط خط تقسیم بندی 3 که از یک نقطه دلخواه بین خطوط عبور می کند، تقسیم می شود. نقاط تقاطع مجاور خطوط ساحلی مانند U و V یا S و T ( شکل 10 ج). بنابراین، پلانهای رودخانه در زمان 1 و زمان 2 به دو یا چند DSLM، DSL-1RM و DSL-SRM تقسیم میشوند. این سه قانون تقسیم بندی باید با هم در نظر گرفته شوند. بنابراین، اگر یک پلان رودخانه هر سه قانون را برآورده کند، باید با هر سه تقسیم بندی شود.
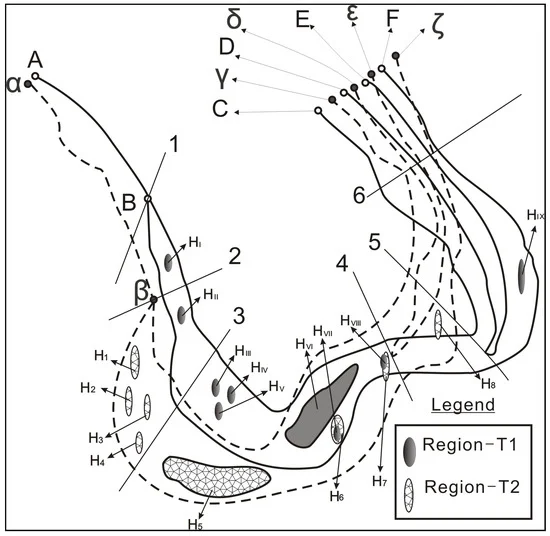
بر اساس این قوانین تقسیمبندی، از شش خط تقسیمبندی برای تقسیمبندی یک پلان رودخانه عملی به چندین بخش استفاده کردیم که میتوان آنها را به SGRPMها که در شکل 11 نشان داده شده است، ساده کرد . اچمن–اچهشتماچمن–اچهشتممناطقی از پلان رودخانه در زمان 1 هستند و نقاط A، B، C، D، E و F در زمان 1 SP یا EP هستند. اچ1–اچ9اچ1–اچ9مناطقی از پلان رودخانه در زمان 2 هستند و نقاط α، β، γ، δ، ε و ζ SP یا EP در زمان 2 هستند.
4.3. جدول مکانیزم استدلال ترکیبی پلانفرم های رودخانه
به دلیل پیچیدگی پلانهای رودخانه، بر اساس مکانیسم استدلال ترکیبی بین SGRPMs و قوانین تقسیمبندی، ما یک جدول مکانیزم استدلال ترکیبی (CRMT) ارائه میکنیم تا مکانیسم استدلال ترکیبی برای RPCها را با جزئیات توصیف کنیم. CRMT شامل چندین DSL4IM، IDM مناطق و DS8DM از SGRPM های مربوطه است، همانطور که در نشان داده شده است.همانطور که در جدول 2. با در نظر گرفتن زمینه، افرادی که از CRMT استفاده میکنند میتوانند همه RPCها را بیان کنند – از جمله کل مهاجرتهای راست و کل مهاجرت به چپ که دارای ماتریسهای توپولوژیکی و متریک ترکیبی یکسانی هستند. علاوه بر این، فرآیندهای تغییر که برای تجزیه و تحلیل پلانفرمهای رودخانه مهم هستند، میتوانند توسط CRMT تحلیل شوند. برای توصیف ساده و واضح IDM ها و DSL4IM ها، از زیرنویس ها برای نمایش روابط متناظر و تمایز بین ماتریس هایی با مقادیر یکسان استفاده کردیم، به عنوان مثال، (0110) ~اچ6–اچIII – VI ، VIII(0110)~اچ6–اچIII–VI،هشتمنشان دهنده IDM های بین اچ6اچ6و اچIIIاچIIIبه اچVIاچVIو اچهشتماچهشتم، که همه آنها را می توان با یک ماتریس توصیف کرد (0110)(0110). ما از نقاط مربوطه برای تمایز بین DSL4IMs و DS8DM های مختلف استفاده کردیم. برای مثال، (0100) ~F،C– δ ، γ(0010)~اف،سی–�،�از بخشهای L4-L5 نشاندهنده DSL4IM بین پلانهای رودخانه در زمان 1 و زمان 2 است که در آن خطوط ساحلی حاوی نقاط F و C هستند. δ ، γ�،�باید توسط (0100)(0010)، و DS8DM های مربوطه آن باید با نشان داده شوند (11101011)(11101101).
5. نتیجه گیری و کار آینده
این مقاله یک مکانیسم استدلال ترکیبی را پیشنهاد میکند که از روابط توپولوژیکی و متریک برای توصیف روابط فضایی بین پلانهای رودخانه برای تشخیص RPCها و تمایز بین RPCهای درست و نادرست استفاده میکند. پنج نوع مدل GIS بر اساس پلانهای طبیعی رودخانه و دو طبقهبندی معمولی پلان رودخانه توسعه داده شدهاند. چهار نوع SGRPM بر اساس مدلهای GIS پلانفرمهای رودخانه برای توصیف روابط توپولوژیکی بین آنها ارائه شدهاند. DSL4IMها برای توصیف روابط توپولوژیکی بین خطوط مستقیم ارائه شدهاند، IDMهای نواحی برای بیان روابط توپولوژیکی بین مناطق توسعه داده شدهاند، و DS8DMs برای تعیین روابط متریک بین خطوط مستقیم پیشنهاد شدهاند. سه قانون تقسیمبندی برای تقسیمبندی پلانهای رودخانه به SGRPMs ایجاد شدهاند.
مکانیسم استدلال پیشنهادی میتواند برای شناسایی RPCها، شناسایی تغییرات کاذب و توصیف فرآیندهای تغییر برای پلانهای عظیم رودخانه استفاده شود. توسعه روشی برای تنظیم خودکار یا نیمه خودکار مکانیسم استدلال باید تمرکز تحقیقات آینده باشد.











بدون نظر