


خلاصه
با توجه به ویژگیهای آشفته سری زمانی زمین لغزشها، یک روش جدید مبتنی بر تجزیه حالت تجربی مجموعه اصلاحشده (MEEMD)، آنتروپی تقریبی و ماشین بردار پشتیبانی حداقل مربعات وزنی (WLS-SVM) پیشنهاد شد. این روش عمدتاً از توالی آشفته تحلیل زمان-فرکانس شروع شد و عملکرد مدل را به شرح زیر بهبود بخشید: ابتدا یک سری زمانی تغییر شکل با استفاده از MEEMD به مجموعهای از دنبالههای بعدی با پیچیدگی بسیار متفاوت تجزیه شد. سپس از روش آنتروپی تقریبی برای تولید یک زیر دنباله جدید برای ترکیب دنبالههای فرعی با پیچیدگی مشابه استفاده شد، که میتواند به طور موثر اطلاعات ویژگی اجزا را متمرکز کند و مقیاس محاسباتی را کاهش دهد. در نهایت مدل پیشبینی WLS-SVM برای هر دنباله جدید ایجاد شد. همزمان، برای انتخاب بعد ورودی و پارامترهای بهینه مدل از تئوری بازسازی فضای فاز و روش جستجوی شبکه ای استفاده شد و سپس برهم نهی هر مقدار پیش بینی شده نتیجه پیش بینی نهایی بود. با در نظر گرفتن داده های تغییر شکل زمین لغزش دانبا به عنوان مثال، آزمایش ها انجام شد و با شبکه عصبی موجک، ماشین بردار پشتیبان، ماشین بردار پشتیبان حداقل مربع و طرح های ترکیبی مختلف مقایسه شد. نتایج تجربی نشان می دهد که الگوریتم از دقت پیش بینی بالایی برخوردار است. این می تواند اثر پیش بینی بهتری را حتی در دوره های تغییر شکل زمین لغزش با نوسانات سریع تضمین کند و همچنین می تواند مقدار باقیمانده را بهتر کنترل کند و به طور موثر فاصله خطا را کاهش دهد. و سپس برهم نهی هر مقدار پیش بینی شده نتیجه پیش بینی نهایی بود. با در نظر گرفتن داده های تغییر شکل زمین لغزش دانبا به عنوان مثال، آزمایش ها انجام شد و با شبکه عصبی موجک، ماشین بردار پشتیبان، ماشین بردار پشتیبان حداقل مربع و طرح های ترکیبی مختلف مقایسه شد. نتایج تجربی نشان می دهد که الگوریتم از دقت پیش بینی بالایی برخوردار است. این می تواند اثر پیش بینی بهتری را حتی در دوره های تغییر شکل زمین لغزش با نوسانات سریع تضمین کند و همچنین می تواند مقدار باقیمانده را بهتر کنترل کند و به طور موثر فاصله خطا را کاهش دهد. و سپس برهم نهی هر مقدار پیش بینی شده نتیجه پیش بینی نهایی بود. با در نظر گرفتن داده های تغییر شکل زمین لغزش دانبا به عنوان مثال، آزمایش ها انجام شد و با شبکه عصبی موجک، ماشین بردار پشتیبان، ماشین بردار پشتیبان حداقل مربع و طرح های ترکیبی مختلف مقایسه شد. نتایج تجربی نشان می دهد که الگوریتم از دقت پیش بینی بالایی برخوردار است. این می تواند اثر پیش بینی بهتری را حتی در دوره های تغییر شکل زمین لغزش با نوسانات سریع تضمین کند و همچنین می تواند مقدار باقیمانده را بهتر کنترل کند و به طور موثر فاصله خطا را کاهش دهد. نتایج تجربی نشان می دهد که الگوریتم از دقت پیش بینی بالایی برخوردار است. این می تواند اثر پیش بینی بهتری را حتی در دوره های تغییر شکل زمین لغزش با نوسانات سریع تضمین کند و همچنین می تواند مقدار باقیمانده را بهتر کنترل کند و به طور موثر فاصله خطا را کاهش دهد. نتایج تجربی نشان می دهد که الگوریتم از دقت پیش بینی بالایی برخوردار است. این می تواند اثر پیش بینی بهتری را حتی در دوره های تغییر شکل زمین لغزش با نوسانات سریع تضمین کند و همچنین می تواند مقدار باقیمانده را بهتر کنترل کند و به طور موثر فاصله خطا را کاهش دهد.
کلید واژه ها:
گروه اصلاح شده تجزیه حالت تجربی ; آنتروپی تقریبی بازسازی فضای فاز ; دستگاه بردار پشتیبان حداقل مربعات وزنی ; ارزیابی دقت
1. معرفی
تغییر مکان و ناپایداری شیب اغلب در شیب های طبیعی و مصنوعی به عنوان پدیده تغییر شکل مواجه می شود. آنها اهمیت مهمی در ارزیابی پایداری شیب، هشدار اولیه ایمنی شیب، و کنترل خطر شیب لغزنده برای درک به موقع قوانین تکامل تغییر شکل شیب و پیش بینی دقیق قوانین تکامل آینده و روند تغییر شکل شیب دارند [ 1 ، 2 ، 3 ، 4 ، ، 6 ، 7 ، 8]. در حال حاضر روشهای اصلی پیشبینی تغییر شکل زمین لغزش شامل مدلهای خاکستری، شبکههای عصبی، ماشین بردار پشتیبان (SVM)، ماشین بردار پشتیبان حداقل مربعات (LS-SVM) و انواع ترکیبی از روشهای پیشبینی است [ 5 ، 6 ، 7 ، 8 ، 9]. زمانی که نوسان توالی داده اصلی زیاد باشد و اطلاعات بیش از حد پراکنده باشد، دقت پیشبینی نظریه گری نسبتاً پایین است. مدلهای شبکه عصبی دارای نقصهایی هستند که غلبه بر آنها دشوار است، مانند به دام افتادن آسان در حداقلهای محلی، مشکلات در تعیین ساختار شبکه، و پیشنیاز برای کاربرد موفقیتآمیز که مکانیزم دینامیکی سیستم سازگاری نسبی دارد. با ظهور نوع جدیدی از الگوریتم یادگیری عمومی، SVM، که بر اساس حجم نمونه کوچک و تئوری یادگیری آماری [ 9 ، 10 ] است، بسیاری از محققان آن را در پیش بینی تغییر شکل به کار برده اند و به نتایج خوبی دست یافته اند. ژائو و همکاران [ 11] SVM را در پیشبینی تغییر شکل به کار بردند و مشکل پیشبینی تغییر شکل پیچیده تحت تأثیر چند عاملی را حل کردند به طوری که دقت آن بهتر از روشهای پیشبینی سنتی بود. با این حال SVM محدودیت هایی در سرعت محاسبات آهسته و استحکام ضعیف دارد. LS-SVM به عنوان یک توسعه SVM، می تواند پیچیدگی محاسباتی را کاهش دهد، می تواند سرعت حل را افزایش دهد، و توانایی ضد تداخل قوی دارد، اما مشکل استاندارد استحکام SVM را از دست می دهد [12، 13 ] .]. با توجه به اثرات ترکیبی آب های زیرزمینی، فعالیت های انسانی و سایر عوامل، ایجاد یک مدل نسبتا دقیق از رابطه پیچیده غیرخطی بین تغییر شکل و عوامل تأثیر دشوار است. جابجایی زمین لغزش ها اغلب دارای ویژگی کنترل شدن توسط مقیاس زمانی، با روند رشد در مقیاس های زمانی بزرگ و داشتن تصادفی و نوسان قابل توجه در مقیاس های زمانی کوچک است. نوسانات نیز دارای تناوب و نظم خاصی در مقیاس زمانی معین هستند. سیگنال سری زمانی جابجایی زمین لغزش به طور کلی از چهار بخش زیر تشکیل شده است. آیتم گرایش قطعی، آیتم تناوبی، آیتم ضربان و آیتم تصادفی با عدم قطعیت [ 14 ، 15 ، 16 ، 17]. سیستم زمین لغزش متعلق به یک سیستم اتلاف انرژی غیرخطی است که وضعیت آشفته بسیار آشکاری را در تکامل بلند مدت سیستم نشان می دهد [ 14 ، 15 ، 16 ، 17 ]. از دیدگاه تحلیل زمان-فرکانس، وانگ و همکاران. [ 18 ، 19] تجزیه موجک و SVM را ترکیب کرد و آن را در پیش بینی تغییر شکل به کار برد. این مدل پیشبینی میتواند دقت پیشبینی را پس از تجزیه سریهای تغییر شکل به سیگنالهای باند باریک با مقیاسهای مشخصه متفاوت، بهبود بخشد. با این حال، کلید تجزیه و تحلیل موجک، انتخاب تابع موجک و مقیاس تجزیه است. اجتناب از تأثیر عوامل انسانی دشوار است و رسیدن به تجزیه بهینه جهانی سیگنال آسان نیست. بنابراین، از طریق تجزیه و تحلیل آشفته توالی تغییر شکل زمین لغزش، حفاری اطلاعات ضمنی زمان-فرکانس، ارائه دادههای مؤثرتر برای پیشبینی مدلسازی، و ایجاد یک مدل ترکیبی معقول برای بهبود عملکرد پیشبینی اهمیت پژوهشی خاصی دارد.
بر اساس ویژگی های زمین لغزش ها و تحقیقات فوق، این مقاله از دو جنبه نحوه جداسازی موثر اطلاعات زمان-فرکانس دنباله آشوب و بهبود عملکرد مدل آغاز شد و یک الگوریتم پیش بینی سری زمانی آشوب زمین لغزش را پیشنهاد کردیم. تجزیه حالت تجربی مجموعه اصلاح شده (MEEMD)، آنتروپی تقریبی و ماشین بردار پشتیبانی حداقل مربعات وزنی (WLS-SVM). اول MEEMD [ 20 ، 21 ، 22 ] برای تجزیه سری زمانی زمین لغزش غیر ساکن به یک سری از مقیاس های مشخصه مختلف تابع حالت ذاتی (IMF) استفاده شد. سپس آنتروپی تقریبی [ 23 ، 24] برای تجزیه و تحلیل پیچیدگی هر جزء به کار گرفته شد و یک دنباله جدید از طریق انباشته ترکیبی مطابق با مقادیر آنتروپی مختلف تولید کرد. در نهایت از WLS-SVM برای مدلسازی [ 12 ، 13 ] و تحلیل دنباله جدید استفاده شد. در همان زمان، نظریه بازسازی فضای فاز [ 25 ] و جستجوی شبکه [ 26 ] برای تعیین بعد ورودی بهینه مدل و پارامترهای بهینه استفاده شد. با در نظر گرفتن داده های تغییر شکل زمین لغزش به عنوان یک مثال تجربی، شبکه عصبی موجک، SVM، LS-SVM و هفت طرح ترکیبی دیگر را از طریق مراحل مختلف پیش بینی مقایسه کردیم تا امکان سنجی و کارایی الگوریتم جدید در زمین لغزش را بررسی و تأیید کنیم. توالی آشفته
2. مدل پیش بینی زمین لغزش بر اساس MEEMD، آنتروپی تقریبی و WLS-SVM
2.1. گروه اصلاح شده تجزیه حالت تجربی
با افزودن نویز سفید به سیگنال، تجزیه حالت تجربی مجموعه (EEMD) [ 27 ] میتواند مشکل اثر مرزی تجزیه حالت تجربی سنتی را تا حد معینی حل کند و سیگنال واقعی را میتوان تا حد حداکثری حفظ کرد. با این حال EEMD برخی از مشکلات زیر را نیز دارد [ 28 ، 29]: اگر دامنه نویز سفید اضافه شده به EEMD خیلی کم باشد، نمی تواند پشته حالت مخلوط را به خوبی مهار کند. اگر بیش از حد بزرگ باشد، میانگین کل محاسبه را افزایش می دهد، به راحتی باعث تجزیه اجزای فرکانس بالا می شود و نویز سفید باقیمانده را بیش از حد بزرگ می کند. علاوه بر این، نتیجه تجزیه EEMD لزوماً استاندارد IMF نیست، اما مشکل تقسیم حالت نیز ممکن است رخ دهد، یعنی همان فرآیند فیزیکی به چندین مؤلفه IMF تقسیم میشود. بنابراین، با توجه به توالی آشفته تغییر شکل زمین لغزش، این مقاله از MEEMD برای تجزیه استفاده میکند و فرآیند تجزیه دقیق در ادبیات نشان داده شده است [ 20 ، 21 ، 22 ].
2.2. اصل آنتروپی تقریبی
پینکون و همکاران [ 23 ] روش آنتروپی تقریبی را برای اندازهگیری درجه پیچیدگی در سال 1991 پیشنهاد کرد. این روش میتواند مقادیر پایدار با دادههای کمتر به دست آورد و برای کاربردهای مهندسی مناسب است. مقدار آنتروپی تقریبی می تواند پیچیدگی دنباله را منعکس کند. هر چه مقدار بیشتر باشد دنباله پیچیده تر است. مراحل محاسبه دقیق به شرح زیر است [ 23 ]:
(1) تنظیم یک توالی کنار زمین به عنوان { x ( i ) ، i = 1 ، 2 ، ⋯ ، n }{ایکس(من)، من=1،2،⋯،�}، ساخت یک بردار m بعدی با توجه به ترتیب دنباله ها:
ایکس( i ) = [ x ( i ) , x ( i + 1 ) , x ( i + 2 ) , ⋯ , x ( i + m − 1 ) ] , ( i = 1 , 2 , ⋯ , n − m + 1 ) ) ایکس(من)=[ایکس(من)،ایکس(من+1)،ایکس(من+2)،⋯،ایکس(من+متر–1)]، (من=1،2،⋯،�–متر+1)
(2) فرض کنید که حداکثر تفاوت بین ایکس( من )ایکس(من)و ایکس( j ) ، ( j = 1 ، 2 ، ⋯ ، n – m + 1 ، j ≠ i ) ایکس(�)، (�=1،2،⋯،�–متر+1، �≠من)است Dمتر[ X( i ) ، X( ج ) ]�متر[ایکس(من)،ایکس(�)]:
Dمتر[ X( i ) ، X( j ) ]=حداکثر0 ~ m − 1| x ( i + k ) − x ( j + k ) |�متر[ایکس(من)،ایکس(�)]=حداکثر0~متر–1|ایکس(من+ک)–ایکس(�+ک)|
در اینجا فاصله بین بردار محاسبه می شود ایکس( من )ایکس(من)و سایر بردارها ایکس( j )ایکس(�)مطابق با منمنبرای به دست آوردن حداکثر فاصله
(3) تنظیم تلورانس مشابه به عنوان r ( r > 0 )�(�>0)، شمارش اعداد Dمتر[ X( i ) ، X( ی ) ]<ر�متر[ایکس(من)،ایکس(�)]<�، محاسبه نسبت سیمترمن( ر )سیمنمتر(�)از اعداد Dمتر[ X( i ) ، X( ی ) ]<ر�متر[ایکس(من)،ایکس(�)]<�به تعداد کل مسافت ( n – m + 1 )(�–متر+1):
سیمترمن( r ) =1n – m + 1جمع {Dمتر[ X( i ) ، X( j ) ]<r}سیمنمتر(�)=1�–متر+1مجموع{�متر[ایکس(من)،ایکس(�)]<�}
اینجا، ( j = 1 , 2 , ⋯ , n − m + 1 , j ≠ i )(�=1،2،⋯،�–متر+1، �≠من)، مجموعمجموعتعداد است Dمتر[ X( i ) ، X( ی ) ]<ر�متر[ایکس(من)،ایکس(�)]<�.
(4) محاسبه لگاریتم از سیمترمن( ر )سیمنمتر(�)، و سپس محاسبه میانگین ϕمتر( ر )�متر(�)از همه منمن:
ϕمتر( r ) =1n – m + 1∑i = 1n – m + 1لوگاریتمسیمترمن( ر )�متر(�)=1�–متر+1∑من=1�–متر+1لوگاریتمسیمنمتر(�)
(5) اضافه کردن بعد به m + 1متر+1با تکرار مراحل (1) تا (4)، سیm + 1من( ر )سیمنمتر+1(�)و ϕm + 1( ر )�متر+1(�)می توان به دست آورد.
(6) تنظیم آنتروپی تقریبی به عنوان A p En ( m , r )آپ��(متر،�):
A p En ( m ، r ) =لیمn → ∞[ϕمتر( r ) –ϕm + 1( ر ) ]آپ��(متر،�)=لیم�→∞[�متر(�)–�متر+1(�)]
بطور کلی n�یک مقدار محدود است و سپس مقدار تقریبی آنتروپی به دست می آید:
A p En ( m ، r ، n ) =ϕn( r ) –ϕm + 1( ر )آپ��(متر،�،�)=��(�)–�متر+1(�)
بدیهی است ارزش A p Enآپ��مربوط به مترمتر، r�و n�. به طور معمول ارزش A p Enآپ��عمدتا بستگی دارد مترمترو r�، و کمتر به آن بستگی دارد n�. بطور کلی مترمتر2 است و r�مقداری است بین 0.1 و 0.25 S D0.1 و 0.25اس�، جایی که اسDاس�انحراف معیار توالی است. از این رو مترمتر2 است و r�است 0.2 SD0.2اس�در این صفحه.
2.3. نظریه بازسازی فضای فاز
Kennel et al. نظریه بازسازی فضای فازی [ 25 ] را پیشنهاد کرد و نظریه آشوب را در تحلیل سری زمانی غیرخطی معرفی کرد. با استفاده از این روش، مشخصات دینامیکی غیرخطی دنباله تغییر شکل شیب جانبی حفاری شد. بهینهسازی نمونههای یادگیری مدل پیشبینی براساس این روش، روشی مؤثر و بدیع تلقی شده است که از اهمیت خاصی برخوردار است. در همان زمان، Takens [ 30 ] ثابت کرد که انتخاب مناسب زمان تأخیر و ابعاد جاسازی به اندازه کافی بزرگ میتواند باعث شود که فضای فاز بازسازیشده قاعده وضعیت سیستم را با تکامل زمان به درستی منعکس کند، و دارای همان ویژگیهای دینامیکی واقعی است. سیستم های.
برای دنباله تغییر شکل زمین لغزش در این مقاله، { y( t ) ، t = 1 ، 2 ، ⋯ ، n }{�(تی)، تی=1،2،⋯،�}، n�طول دنباله است. طبق نظریه تاکنز، تابع f( ⋅ )�(·)وجود دارد و فضای فاز بازسازی شده [ 25 ] است:
Yt + 1= f(Yتی،Yt – τ، ⋯ ،Yt − ( m − 1 ) τ)�تی+1=�(�تی،�تی–�،⋯،�تی–(متر–1)�)
اینجا τ�زمان تاخیر است و مترمترتعداد ابعاد تعبیه شده است.
انتخاب صحیح زمان تاخیر و بعد تعبیه شده مستقیماً به دقت بازسازی دنباله مربوط می شود. روش های رایج عبارتند از الگوریتم GP، روش خود همبستگی پیچیده، روش CC و غیره. در این مقاله از روش CC برای بازسازی فضای فاز هر زیر دنباله جدید استفاده شده است. اصل اساسی روش CC برآورد تاخیر زمانی است τ�و پنجره زمانی τw( m − 1 ) τ��(متر–1)�با استفاده از تابع انتگرال همبستگی سری های زمانی تعبیه شده.
2.4. ماشین بردار پشتیبانی حداقل مربعات وزنی
2.4.1. ماشین بردار پشتیبانی حداقل مربعات
فرض کنید که مجموعه آموزشی نمونه داده شده است { (ایکسمن،yمن) | i = 1 ، 2 ، ⋯ ، N}{(ایکسمن،�من)|من=1،2،⋯،ن}. اینجا ایکسمن∈آرnایکسمن∈آر�یک داده ورودی n بعدی است .آرnآر�یک فضای برداری n بعدی است که از اعداد واقعی تشکیل شده است. yمن∈ ر�من∈آریک داده خروجی است و آر�یک عدد واقعی است تابع تصمیم خطی بهینه در این فضا به صورت زیر ساخته می شود:
f( x ) =wتیϕ ( x ) + b�(�)=���(�)+�
اینجا ϕ ( x ) :آرn→آرnساعت�(�):��→��ℎیک تابع نگاشت غیرخطی است که داده های فضای ورودی را به فضای ویژگی با ابعاد بالا نگاشت می کند. w ∈آرnساعت�∈��ℎبردار وزن فضای وزن اصلی است، آرnساعت��ℎیک بردار فضایی با ابعاد بالا است که از اعداد واقعی تشکیل شده است، ب ∈ R�∈�آیتم افست است و wتی��انتقال بردار است w�.
با توجه به اصل کمینه سازی ریسک ساختاری (SRM)، تابع هدف سسو شرط محدودیت yمن�منبه شرح زیر است:
⎧⎩⎨⎪⎪⎪⎪دقیقهw , b , eQ ( w , e ) =12wتیw +γ2∑i = 1نه2منyمن=wتیϕ (ایکسمن) + b +همن ( i = 1 ، 2 ، ⋯ ، N){دقیقه�،ب،هس(�،ه)=12�تی�+�2∑من=1نهمن2�من=�تی�(ایکسمن)+ب+همن (من=1،2،⋯،ن)
اینجا γ> 0�>0پارامتر تنظیم (یا ضریب جریمه) است. همنهمنواریانس خطا است و ههبردار متشکل از واریانس های خطا است.
معرفی تابع ضریب لاگرانژ، αمن∈ ر�من∈آرتابع لاگرانژ به صورت زیر بدست می آید:
L ( w , b , e , a ) = Q ( w , e ) –∑i = 1نآمن{wتیϕ (ایکسمن) + b +همن–yمن}�(�،ب،ه،آ)=س(�،ه)–∑من=1نآمن{�تی�(ایکسمن)+ب+همن–�من}
اینجا a =[آ1،آ2، ⋯ ،آن]تیآ=[آ1،آ2،⋯،آن]تی. با توجه به شرط KKT (Karush-Kuhn-Tucker)، راه حل بهینه با محاسبه مشتقات جزئی تابع لاگرانژ به دست می آید:
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪∂ L∂ ω= 0 → W =∑نi = 1آمنϕ (ایکسمن)∂ L∂ ب= 0 → − ∑نi = 1آمن= 0∂ L∂همن= 0 → γ همن=آمن∂ L∂آمن= 0 → wتیϕ (ایکسمن) + b +همن–yمن= 0{∂�∂�=0 → دبلیو=∑من=1نآمن�(ایکسمن)∂�∂ب=0 → –∑من=1نآمن=0∂�∂همن=0 → �همن=آمن∂�∂آمن=0 → �تی�(ایکسمن)+ب+همن–�من=0
از طریق حذف ω�و ههدر فرمول (11)، مسئله بهینه سازی به صورت زیر به یک معادله خطی تبدیل می شود:
[0آآتیک(ایکسk 1،ایکسk 2) +γ– 1من] [بآ] = [0y][0آتیآک(ایکسک1،ایکسک2)+�–1من][بآ]=[0�]
اینجا y=[y1،y2، ⋯ ،yن]تی�=[�1،�2،⋯،�ن]تی; A =[ 1 , ⋯ , 1 ]تیآ=[1،⋯،1]تی; منمنیک ماتریس هویت مرتبه N است. و ک(ایکسk 1،ایکسk 2)ک(ایکسک1،ایکسک2)یک تابع هسته است که شرط Mercer را برآورده می کند، ک(ایکسk 1،ایکسk 2)∈ن× Nک(ایکسک1،ایکسک2)∈ن×ن. در حال حاضر، 3 نوع توابع هسته رایج وجود دارد: (1) تابع خطی ک(ایکسk 1،ایکسk 2) =ایکستیk 1ایکسk 2ک(ایکسک1،ایکسک2)=ایکسک1تیایکسک2; (2) تابع چند جمله ای ک(ایکسk 1،ایکسk 2) =(ایکستیk 1ایکسk 2+ 1 )د، د= 1 ، 2 ، ⋯ک(ایکسک1،ایکسک2)=(ایکسک1تیایکسک2+1)د، د=1،2،⋯; و (3) تابع پایه شعاعی (RBF) ک(ایکسk 1،ایکسk 2) = exp ( – ∥ایکسk 1–ایکسk 2∥ / 2σ2)ک(ایکسک1،ایکسک2)=انقضا(–“ایکسک1–ایکسک2“/2�2).
از آنجا که B = K(ایکسk 1،ایکسk 2) +γ– 1منب=ک(ایکسک1،ایکسک2)+�–1منیک ماتریس قطعی مثبت متقارن است، آآو ببدر فرمول (12) را می توان با استفاده از اصل حداقل مربع محاسبه کرد. بنابراین مدل پیشبینی غیرخطی LS-SVM به دست میآید:
y( x ) =∑i = 1نآمنک( x _ایکسمن) + ب�(ایکس)=∑من=1نآمنک(ایکس،ایکسمن)+ب
2.4.2. ماشین بردار پشتیبانی حداقل مربعات وزنی
LS-SVM مسئله برنامه نویسی درجه دوم SVM را به مسئله حل معادلات خطی تبدیل می کند که می تواند پیچیدگی محاسباتی را کاهش دهد و سرعت حل را بهبود بخشد. با این حال LS-SVM استحکام اولیه خود را از دست داده است، که باعث می شود وزن نمونه های آموزشی داده شده توسط تابع هدف یکسان شود. یعنی نقش نمونه در تربیت یکسان است. با این حال، در عمل، ویژگی های داده های نمونه های مختلف متفاوت است یا تأثیر عوامل خارجی مختلف یکسان نیست. بنابراین وزن در تمرین یکسان نیست. بنابراین برای به دست آوردن مجدد استحکام و ایجاد یک مدل پیش بینی دقیق تر، این مقاله از LS-SVM بهبود یافته استفاده می کند. یعنی WLS-SVM [ 12 ، 13]. این مدل فاکتور وزن متفاوتی را ارائه می دهد vمن�منبه هر خطا همن=آمن/ γهمن=آمن/�بر اساس LS-SVM، بنابراین مشکل بهینه سازی فرمول (9) به زیر تبدیل می شود:
⎧⎩⎨⎪⎪⎪⎪دقیقهw∗،ب∗،ه∗س (w∗،ه∗) =12w* تیw∗+γ2∑i = 1نvمنه* 2منyمن=w* تیϕ (ایکسمن) +ب∗+ه∗من ( i = 1 ، 2 ، ⋯ ، N){دقیقه�*،ب*،ه*س(�*،ه*)=12�*تی�*+�2∑من=1ن�منهمن*2�من=�*تی�(ایکسمن)+ب*+همن* (من=1،2،⋯،ن)
تابع لاگرانژ به زیر تبدیل می شود:
L (w∗،ب∗،ه∗،آ∗) = جی(w∗،ه∗) –∑من =1نآ∗من(w* تیϕ (ایکسمن) +ب∗+ه∗من–yمن)�(�*،ب*،ه*،آ*)=جی(�*،ه*)–∑من=1نآمن*(�*تی�(ایکسمن)+ب*+همن*–�من)
به همین ترتیب معادلات خطی به صورت زیر بدست می آید:
[0آآتیک(ایکسک 1،ایکسk 2) +Vγ] [ب∗آ∗] = [0y][0آتیآک(ایکسک1،ایکسک2)+��][ب*آ*]=[0�]
اینجا Vγ��ماتریس مورب است، Vγ= دمن یک جی{1γv1، ⋯ ،1γvn}��=دمنآ�{1��1،⋯،1���}. سپس؛
vمن=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪1 ، ∣∣همن/اس^∣∣≤ج1ج2–∣∣همن/اس^∣∣ج2–ج1، ج1≤∣∣همن/اس^∣∣≤ج210– 10, e l s e �من={1، |همن/اس^|≤ج1ج2–|همن/اس^|ج2–ج1، ج1≤|همن/اس^|≤ج210–10، هلسه
اینجا اس^اس^تخمین قوی انحراف استاندارد خطا است که می تواند درجه انحراف را اندازه گیری کند. همنهمناز توزیع گاوسی زیر؛ اس^=منQ R2 × 0.6745اس^=منسآر2×0.6745. منQ Rمنسآرمحدوده بین ربعی خطا است همنهمن; یعنی بعد از مرتب کردن آنها بر اساس اندازه ارزش، تفاوت بین ارزش [ 0.75 n ][0.75�]و ارزش [ 0.25 n ][0.25�]. با توجه به ادبیات [ 11 ]، ج1ج12.5 است و ج2ج23 است.
2.4.3. بهینه سازی پارامترهای WLS-SVM
عملکرد WLS-SVM تا حد زیادی توسط انتخاب بهینه تابع هسته تعیین می شود k ( ) ک( )، پارامتر هسته σ�و پارامتر منظم سازی γ�. زیرا RBF می تواند پیچیدگی مدل را بهتر منعکس کند و عملکرد پیش بینی آن بهتر است. بنابراین، این مقاله RBF را به عنوان تابع هسته WLS-SVM انتخاب کرد. با توجه به مسئله انتخاب پارامتر، از روش جستجوی شبکه برای بهینه سازی پارامترها استفاده شد و اصل اساسی آن تقسیم شبکه مش در محدوده معینی بود. σ�و γ�، تمام نقاط شبکه مش را طی کنید و مقادیر را تعریف کنید. با توجه به مقادیر σ�و γ�، ریشه آموزش میانگین مربعات خطا (RMSE) به دست آمده با استفاده از روش اعتبار سنجی متقاطع به عنوان تابع هدف محاسبه نقطه شبکه [ 26 ] در نظر گرفته شد. در نهایت ( σ، γ)(�،�)مقادیر به عنوان پارامتر بهینه با به حداقل رساندن RMSE مجموعه آموزشی انتخاب شدند. مراحل بهینه سازی پارامتر به شرح زیر است [ 26 ]:
- (1)
-
تنظیم محدوده مقدار، اندازه گام، و فاصله شبکه پارامترها ( σ، γ)(�،�)فرآیند بهینه سازی در این مقاله به دو مرحله انتخاب درشت و انتخاب دقیق تقسیم می شود. پارامترها به صورت زیر تنظیم می شوند؛ فاصله بهینه سازی از σ�و γ�است [ 0 ،1010][0،1010]، تعداد نقاط شبکه است 1010×10101010×1010، اندازه گام جستجوی انتخاب درشت 1 است و اندازه مرحله جستجوی انتخاب دقیق 0.1 است.
- (2)
-
از آنجایی که فرآیند بهینهسازی یک فرآیند پیمایشی است، انتخاب مقدار اولیه پارامتر تأثیری بر نتیجه ندارد. مقادیر اولیه این فرآیند جستجو عبارتند از σ= 0�=0و γ= 1�=1. انتخاب موقعیت اولین نقطه شبکه اعتبار سنجی متقاطع، به دست آوردن RMSE آموزشی با استفاده از روش اعتبار سنجی متقاطع به عنوان تابع هدف محاسبه نقطه شبکه، و محاسبه تمام مقادیر نقطه شبکه.
- (3)
-
انتخاب کردن ( σ، γ)(�،�)با کوچکترین RMSE به عنوان پارامترهای بهینه. اگر پارامترهای انتخاب شده نمی توانند نیاز دقت را برآورده کنند، پارامترهای انتخابی را به عنوان نقطه شبکه مرکزی انتخاب کنید، یک صفحه شبکه دو بعدی جدید در محدوده کوچکتر برای محاسبه مجدد تابع هدف بسازید و پارامتر را انتخاب کنید. ( σ، γ)(�،�)با کوچکترین RMSE دوباره به عنوان پارامتر بهینه. اگر نیاز دقت برآورده شد، مراحل فوق را متوقف یا تکرار کنید، پارامترهای دقیق را بدست آورید ( σ، γ)(�،�)و آنها را به عنوان مقادیر بهینه در نظر بگیرید.
2.4.4. روش محاسباتی WLS-SVM
- (1)
-
با توجه به نمونه داده شده از داده های تغییر شکل زمین { (ایکسمن،yمن) | i = 1 ، 2 ، ⋯ ، N}{(ایکسمن،�من)|من=1،2،⋯،ن}، تعیین پارامتر بهینه ( σ، γ)(�،�)، بدست آوردن آمنآمناز فرمول (12) و سپس محاسبه همن=آمن/ γهمن=آمن/�;
- (2)
-
محاسبه برآورد قوی اس^اس^با توجه به توزیع خطا همنهمن;
- (3)
-
تعیین مقادیر وزنی مربوطه vمن�منمطابق با همنهمنو اس^اس^از طریق فرمولاسیون (17);
- (4)
-
سرانجام آ∗آ*و ب∗ب*را می توان با فرمول (16) بدست آورد. بر این اساس مدل نهایی پیشبینی غیرخطی را میتوان به صورت زیر بدست آورد:y( x ) =∑i = k 1نآ∗منک( x _ایکسمن) +ب∗�(ایکس)=∑من=ک1نآمن*ک(ایکس،ایکسمن)+ب*
مشاهده می شود که LS-SVM محاسبه شده از فرمول (12) راه حل بهینه با این فرض است که خطا همنهمناز توزیع گاوسی تبعیت می کند، در حالی که WLS-SVM انحراف ناشی از توزیع غیر گاوسی خطا را تصحیح می کند. همنهمناز طریق تعریف وزن در فرمول (17)، که رگرسیون WLS-SVM را قوی می کند و دقت پیش بینی را بهبود می بخشد.
3. تجزیه و تحلیل نمونه ها
3.1. ویژگی های اساسی لندساید
منطقه لغزش زمین در منطقه کوهستانی و تنگه نزدیک رودخانه دادو در حاشیه شرقی فلات تبت واقع شده است. این منطقه با تپه های موج دار و کوه های شیب دار مشخص می شود. زمین لغزش در ساحل سمت راست رودخانه دادو، یعنی شیب بلند و تند در پایین کوه بایکسیا، که در سمت جنوبی خیابان جیانشه، شهرستان دانبا است، واقع شده است، همانطور که در شکل 1 نشان داده شده است .. این اراضی بر اساس اراضی باستانی شکل گرفته و توسعه یافته است. این یک زمین لغزش تجمعی عظیم است. ارتفاع قسمت جلویی آن بین 1881 متر و 1892 متر است. ارتفاع انتهای پشتی آن بین 2070 متر تا 2110 متر است. قسمت جلویی زمین لغزش به خیابان جیانشه در پای شیب می رسد. محیط زمین بسیار مشخص است. ارتفاع نسبی لبه قدامی و خلفی آن 223 متر است. عرض انتهای جلو، وسط و پشت آن به ترتیب حدود 250 متر، 230 متر و 280 متر است. طول زمین حدود 290 متر، مساحت حدود 0.08 کیلومتر مربع ، ضخامت 18-45.23 متر، ضخامت متوسط حدود 30 متر، و حجم حدود 2.2 میلیون متر مربع است .. با توجه به بررسی و پایش دینامیکی زمین، تغییر شکل سطح زمین لغزش از جمله ترک کششی در پشت، تغییر شکل برآمدگی لبه جلویی، ترک برشی در دو طرف زمین لغزش و … بسیار مشهود است. . جابجایی سطح زمین لغزش بیش از 30 میلی متر در روز است. سرعت جابجایی در وسط و جلوی زمین لغزش بیش از 35 میلی متر در روز است. ترک ها در محیط زمین لغزش متصل می شوند. همه همانطور که در شکل 2 نشان داده شده است .
3.2. داده های تجربی
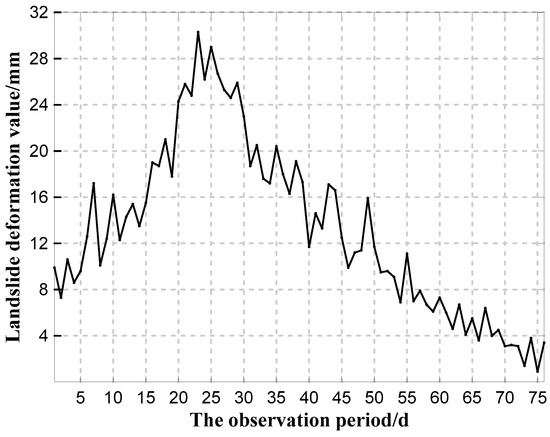
در این مطالعه، داده های تجربی از جابجایی سطح زمین لغزش دانبا [ 31 ] به دست آمده است. در نظر گرفتن نقاط نظارت آینه ششم کلیدی است و داده های نظارتی آن نسبتا کامل است. بنابراین، در این مقاله، دادههای مانیتورینگ نقاط پایش آینه ششم برای پیشبینی و تحلیل انتخاب شدهاند. 76 دوره داده های مشاهده وجود دارد، همانطور که در شکل 3 نشان داده شده است .
شکل 3 نشان می دهد که تغییر شکل زمین لغزش نسبتا شدید، غیرخطی، بسیار غیر ثابت و تصادفی بوده است. بزرگی تغییر شکل نسبتاً زیاد بود. یک قله محدب تیز در طول روند صعودی تشکیل شد و به یک روند نزولی تبدیل شد. اختلاف بین حداکثر و حداقل مقدار تغییر شکل 29.4 میلی متر بود. نمایندگی خاصی دارد. واضح است که انعکاس روند تغییر شکل زمین لغزش در صورت استفاده از روش پیشبینی سنتی بسیار دشوار است.
3.3. فرآیند مدلسازی
برای تأیید امکانسنجی مدل پیشبینی مبتنی بر MEEMD، آنتروپی تقریبی و WLS-SVM، 11 نوع طرح زیر برای مقایسه با یکدیگر ایجاد شد. طرح 1 (مدل پیشبینی شبکه عصبی موجک)، طرح 2 (مدل پیشبینی SVM)، طرح 3 (مدل پیشبینی LS-SVM)، طرح 4 (مدل پیشبینی شبکه عصبی موجک که فضای فاز بازسازیشده دنباله اصلی را به عنوان نمونه میگیرد)، طرح 5 (مدل پیشبینی LS-SVM که فضای فاز بازسازیشده دنباله اصلی را بهعنوان نمونه میگیرد)، طرح 6 (مدل پیشبینی شبکه عصبی موجک که هر دنباله جدید را به عنوان نمونه میگیرد)، طرح 7 (مدل پیشبینی شبکه عصبی موجک که فضای فاز بازسازیشده را میگیرد. از دنباله جدید به عنوان نمونه)، طرح 8 (مدل پیش بینی LS-SVM که هر دنباله جدید را به عنوان نمونه می گیرد)، طرح 9 (مدل LS-SVM که فضای فاز بازسازی شده دنباله جدید را به عنوان نمونه می گیرد)، طرح 10 (مدل پیش بینی WLS-SVM دنباله جدید را به عنوان نمونه می گیرد)، و طرح 11 (الگوریتم این مقاله). برای کاهش خطای مدلسازی، دادههای تغییر شکل زمین لغزش از قبل پردازش شدند، و دادهها به بازه [-1، 1] نرمالسازی شدند و پس از استفاده از مدل برای پیشبینی، به بازه اصلی بازگشتند. در این مقاله داده های 56 دوره اول به عنوان نمونه آموزشی و داده های 20 دوره آخر به عنوان نمونه آزمون انتخاب شدند. مراحل پیشبینی 5، 10 و 20 بود. برای مثال، زمانی که مرحله پیشبینی 5 بود، مدلی برای پیشبینی دادههای دوره 57 تا 61 بر اساس دادههای دوره اول تا 56 ایجاد شد. سپس مدلی برای پیش بینی داده های دوره 62 تا 66 بر اساس داده های دوره 6 تا 61 و به همین ترتیب ایجاد شد تا اینکه داده های دوره 76 پیش بینی شد. فرآیندهای مدل سازی در این مقاله به شرح زیر بود:
- (1)
-
برای صاف کردن توالی پیچیده، توالی زمین لغزش برای به دست آوردن تعداد محدودی از اجزای IMF و یک حاشیه با استفاده از MEEMD تجزیه شد.
- (2)
-
تجزیه و تحلیل پیچیدگی هر جزء با استفاده از آنتروپی تقریبی، ترکیب اجزای مجاور با اختلاف اندک در آنتروپی و به دست آوردن یک دنباله جدید برای کاهش اندازه محاسبه.
- (3)
-
بازسازی فضای فاز هر زیر دنباله جدید با استفاده از روش CC، که می تواند از انتخاب تصادفی ابعاد ورودی مدل پیش بینی جلوگیری کند.
- (4)
-
ایجاد مدل پیشبینی WLS-SVM بر اساس فضای فاز بازسازیشده دنبالههای جدید توسط مرحله 3 برای پیشبینی.
- (5)
-
بر هم زدن نتیجه پیشبینی هر دنباله جدید برای به دست آوردن ارزش پیشبینی نهایی تغییر شکل زمین لغزش و سپس ارزیابی دقت هر مدل.
3.4. تجزیه و تحلیل نتایج پیش بینی
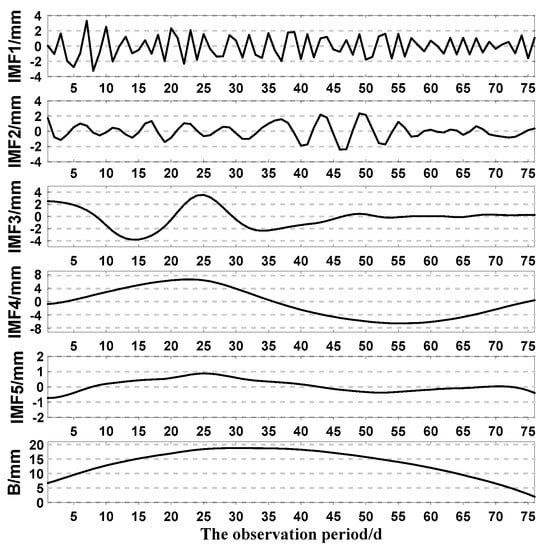
از تجزیه و تحلیل در بخش 3.1 ، زمین لغزش نسبتا پیچیده است. برای تجزیه و تحلیل بهتر سری های زمانی آشفته زمین لغزش و به دست آوردن دقت پیش بینی بالاتر، از MEEMD و آنتروپی تقریبی برای تجزیه و تحلیل توالی زمین لغزش استفاده شد. هر جزء تجزیه شده توسط MEEMD در شکل 4 نشان داده شده است .
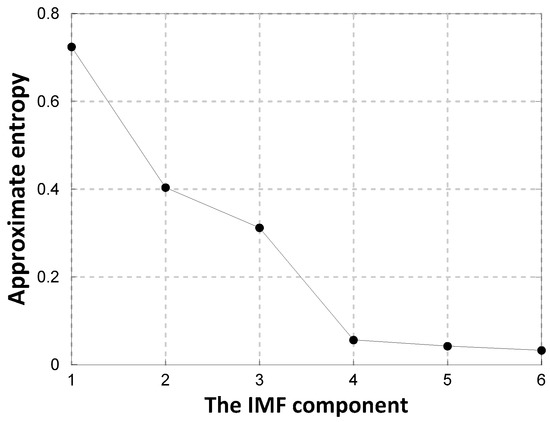
همانطور که در شکل 4 نشان داده شده است، MEEMD می تواند به طور موثر اطلاعات زمان-فرکانس توالی زمین لغزش را تجزیه کند و فرکانس هر جزء به تدریج در حال کاهش است. با این حال، به دلیل ثابت نبودن، توالی زمین لغزش به اجزای بیشتری تجزیه می شود. ایجاد مستقیم مدل پیشبینی برای پیشبینی هر جزء، میزان مدلسازی مورد نیاز را به میزان قابل توجهی افزایش میدهد و کارایی را کاهش میدهد. برای پیشبینی مؤثرتر توالی زمین لغزش، از نظریه آنتروپی تقریبی برای ارزیابی پیچیدگی هر جزء استفاده شد. آنتروپی تقریبی هر صندوق بین المللی پول در شکل 5 نشان داده شده است .
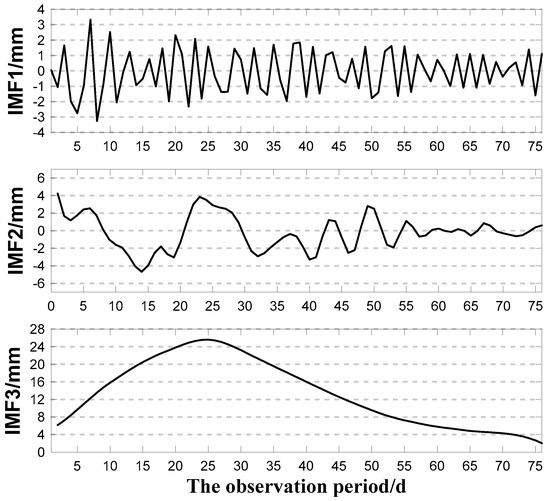
همانطور که در شکل 5 نشان داده شده است، آنتروپی تقریبی هر جزء با کاهش فرکانس مولفه کاهش مییابد، که بیشتر نشان میدهد که MEEMD میتواند به طور موثری غیرایستایی دنباله اصلی را کاهش دهد، مولفه را گام به گام با کاهش تدریجی پیچیدگی تجزیه کند. و کارآیی اعمال آنتروپی تقریبی بر پیچیدگی توالی زمین لغزش را تأیید کنید. شکل 5 همچنین نشان می دهد که تفاوت در آنتروپی های IMF2، IMF3، IMF4، IMF5 و IMF6 (حاشیه B) خیلی زیاد نیست. برای کاهش مقیاس محاسباتی مدلسازی، آنها ترکیب شده و روی هم قرار میگیرند. نتایج در جدول 1 نشان داده شده است و هر دنباله جدید در شکل 6 نشان داده شده است . از جانبشکل 6 ; اطلاعات با فرکانس بالا و نوسانات قوی به طور کامل توسط IMF1 منعکس می شود، IMF2 نشان دهنده تصادفی خاصی از توالی زمین لغزش است، و IMF3 به وضوح روند کلی تغییر شکل زمین لغزش را منعکس می کند.
WLS-SVM برای پیش بینی با توجه به دنباله های جدید ایجاد شد. بعد ورودی بهینه توسط فضای فاز بازسازیشده هر دنباله جدید تعیین شد. سپس از روش جستجوی شبکه ای برای انتخاب پارامترهای بهینه WLS-SVM برای پیش بینی استفاده شد. برهم نهی هر جزء نتیجه پیش بینی بود. در همان زمان، زمانی که مرحله پیش بینی 5 تعیین شد، طرح های 1 تا 11 برای مقایسه و تجزیه و تحلیل ایجاد شد. نتایج پیشبینی طرحهای 1 تا 5 در شکل 7 و نتایج پیشبینی طرحهای 6 تا 11 در شکل 8 نشان داده شدهاند . شکل 9 و شکل 10 باقیمانده مدل های مربوطه را نشان می دهد.
همانطور که در شکل 7 و شکل 8 نشان داده شده استنتایج پیشبینی از دوره 57 تا 67 از 11 طرح نسبتاً خوب است. برای دوره 68 تا دوره 76، نتایج پیشبینی طرحهای 4 و 5، که از فضای فاز برای بازسازی دنباله اصلی برای مدلسازی و پیشبینی استفاده میکردند، بهتر از طرحهای 1 تا 3 است. نتایج پیشبینی طرحهای 6 تا 11. ، که از یک زیر دنباله جدید ترکیب شده توسط MEEMD و آنتروپی تقریبی به عنوان داده های نمونه استفاده می کند، نیز نسبتاً خوب هستند. مقایسه طرحهای 6، 8 و 10 نشان میدهد که نتیجه پیشبینی SVM پایدارتر از نتایج شبکه عصبی است. از طرحهای 7، 9 و 11، اثر پیشبینی با استفاده از فضای فاز برای بازسازی هر دنباله جدید بهتر از طرحهای دیگر است. مقادیر پیشبینی طرحهای 9 و 11 مطابقت خوبی با مقادیر واقعی دارند.
همانطور که در شکل 9 و شکل 10 نشان داده شده است، خطای پیشبینی طرحهای 1 تا 3 نسبتاً زیاد است و در برخی از دورههای پیشبینی به وضوح برجسته است. علاوه بر این، خطای پیشبینی با افزایش زمان پیشبینی افزایش مییابد. واضح است که دستیابی مستقیم به نتایج پیشبینی رضایتبخش با استفاده از یک مدل ساده آسان نیست. مقایسه طرحهای 1، 4، 6 و 7 نشان میدهد که نتیجه پیشبینی شبکه عصبی موجک بسیار ناپایدار است و نوسان خطای پیشبینی آن نسبتاً زیاد است، که بیشتر معایب خود شبکه عصبی را نشان میدهد. همانطور که در طرح های 4 و 5 نشان داده شده است، بازسازی فضای فاز دنباله اصلی تأثیر خاصی بر بهبود دقت پیش بینی مدل LS-SVM دارد. با این حال از دوره 68 تا دوره 76، خطای پیشبینی طرح 5 نیز با افزایش دوره پیشبینی نسبتاً بزرگ میشود. بنابراین، به دلیل تداخل متقابل بین اطلاعات مشخصههای مختلف، مدلسازی مستقیم از طریق بازسازی دادههای خام میتواند انعکاس دقیق قانون تکامل زمین لغزش را برای مدل دشوار کند و برای پیشبینی طولانیمدت مفید نباشد. خطای پیشبینی طرحهای 8 تا 11 که اطلاعات مشابه را با استفاده از MEEMD و آنتروپی تقریبی ادغام میکنند، پایداری بسیار خوبی دارد. علاوه بر این، نتایج پیشبینی طرحهای 9 و طرح 11، که از تئوری بازسازی فضای فاز برای انتخاب بعد ورودی بهینه مدل استفاده میکنند، نسبت به سایر طرحها پایدارتر هستند و تغییر در منحنی خطا نیز نسبتاً ثابت است. به طور نسبی نتیجه پیشبینی طرح 11 کمی بهتر از طرح 9 است. بنابراین توالی زمین لغزش پردازش شده توسط MEEMD و آنتروپی تقریبی میتواند باعث شود که مدل واقعاً قوانین تغییر شکل را منعکس کند و یک نتیجه پیشبینی خوبی به دست آورد. بازسازی دادههای نمونه مدل با استفاده از تئوری بازسازی فضای فازی میتواند از تصادفی بودن بعد ورودی مدل جلوگیری کند، به طور موثر عملکرد مدل را بهبود بخشد و دقت پیشبینی مدل را بیشتر افزایش دهد.
برای ارزیابی بیشتر عملکرد مدل، دقت هماهنگ داخلی (IAA)، دقت مطابق خارجی (EAA) و زمان اجرا در آموزش و آزمایش هر طرح در هر مرحله پیشبینی (به عنوان مثال مرحله 5) مقایسه و تجزیه و تحلیل شد. نتایج در جدول 2 نشان داده شده است .
از جدول 2هنگامی که داده های اصلی مستقیماً برای مدل سازی استفاده می شوند، خطای آموزش و خطای پیش بینی مدل نسبتاً زیاد است و خطا به سرعت افزایش می یابد. از طریق تجزیه و تحلیل دادههای نمونه از توالی زمین لغزش جدید پردازش شده توسط MEEMD و آنتروپی تقریبی، برای فرکانس نسبتا بالا و نوسانات قوی دنباله جدید IMF1، خطای آموزشی و خطای آزمایش طرحهای 6 تا 11 تقریباً یکسان است. از طریق مقایسه سه دنباله جدید IMF1، IMF 2 و IMF3، می توان دریافت که خطای آموزش و پیش بینی 5 مرحله اول هر طرح با کاهش فراوانی هر جزء تفاوت چندانی ندارد و خطای آموزش و تست هر طرح به درجات مختلف با افزایش دوره پیش بینی افزایش می یابد. از طرح های 6 و 7، افزایش خطای مدل شبکه عصبی بزرگترین است. مقایسه طرحهای 8 تا 11 نشان میدهد که انتخاب بعد ورودی بهینه مدل با استفاده از تئوری بازسازی فضای فاز برای کاهش خطای آموزش و آزمایش مدل مفید است و میزان افزایش خطا کم است. مقایسه طرحهای 9 و 10 نشان میدهد که LS-SVM بهبود یافته بهتر از LS-SVM سنتی است. بنابراین استحکام SVM نقش خاصی در بهبود عملکرد مدل ایفا می کند. از زمان اجرای هر طرح، زمان کمتری برای ایجاد یک مدل پیشبینی واحد با استفاده از دادههای اصلی به طور مستقیم استفاده میشود. در مقایسه با هر مؤلفه، در شرایط یکسان، زمان مورد استفاده برای پیشبینی هر مؤلفه کمتر از زمان استفاده مستقیم از دادههای اصلی است. زمان اجرای مدل با افزایش پیچیدگی مدل ترکیبی افزایش می یابد. برای همان مدل، زمان آموزش و پیشبینی هر جزء کمتر از زمان استفاده مستقیم از دادههای اصلی است. هنگام آموزش و پیش بینی برای هر جزء، زمان اجرا برای همان مدل با کاهش فرکانس مولفه افزایش می یابد. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است. برای همان مدل، زمان آموزش و پیشبینی هر جزء کمتر از زمان استفاده مستقیم از دادههای اصلی است. هنگام آموزش و پیش بینی برای هر جزء، زمان اجرا برای همان مدل با کاهش فرکانس مولفه افزایش می یابد. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است. برای همان مدل، زمان آموزش و پیشبینی هر جزء کمتر از زمان استفاده مستقیم از دادههای اصلی است. هنگام آموزش و پیش بینی برای هر جزء، زمان اجرا برای همان مدل با کاهش فرکانس مولفه افزایش می یابد. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است. هنگام آموزش و پیش بینی برای هر جزء، زمان اجرا برای همان مدل با کاهش فرکانس مولفه افزایش می یابد. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است. هنگام آموزش و پیش بینی برای هر جزء، زمان اجرا برای همان مدل با کاهش فرکانس مولفه افزایش می یابد. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است. مقایسه بین طرحهای 8 و 10 و طرحهای 9 و 11 نشان میدهد که عملکرد مدل بهبودیافته LS-SVM بهتر از مدل سنتی LS-SVM است. واضح است که زمان اجرای مدل با پیچیدگی داده های نمونه و عملکرد مدل ترکیبی مرتبط است. بنابراین الگوریتم در این مقاله از طریق در نظر گرفتن جامع دقت و زمان اجرای مدل امکان پذیر است.
برای بررسی بیشتر اثربخشی هر طرح برای مراحل مختلف پیشبینی، طرحهای 1 تا 11 با مراحل 5، 10 و 20 ایجاد شد. علاوه بر این، حداقل/حداکثر، RMSE و میانگین خطای مطلق (MAE) برای تحلیل دقت مدل استفاده شد. ، همانطور که در جدول 3 نشان داده شده است. دقت پیشبینی هر یک از روشهای پیشبینی با افزایش مرحله پیشبینی، درجه تغییر متفاوتی دارد. دقت پیش بینی طرح های 1، 2 و 3 به طور قابل توجهی کاهش می یابد. دقت پیشبینی طرحهای 8 تا 11 بسیار بهتر از سایر طرحها است و میزان افزایش خطا نسبتاً کم است. دقت پیشبینی طرح 11 در بین طرحهای 8 تا 11 بهترین است. از حداقل و حداکثر مقدار باقیمانده، طرح 11 میتواند حداقل و حداکثر مقادیر باقیمانده را بهتر کنترل کند و به طور موثر فاصله خطا را کاهش دهد. در نتیجه، این الگوریتم نه تنها میتواند مقادیر پیشبینی محلی خوبی را تضمین کند، بلکه از دقت پیشبینی جهانی مطلوبی نیز برخوردار است. بنابراین الگوریتم زمانی که تغییر شکل زمین لغزش پیچیده یا در پیشبینی بلندمدت باشد، میتواند نتیجه پیشبینی بهتری به دست آورد.
4. نتیجه گیری
برای یک زمین لغزش با تغییر شکل پیچیده، ایجاد یک مدل موثر برای تجزیه و تحلیل به طور مستقیم دشوار است و برای پیشبینی بلندمدت مناسب نیست. در این مقاله، یک الگوریتم پیشبینی ترکیبی مبتنی بر MEEMD، آنتروپی تقریبی و WLS-SVM پیشنهاد شد. تجزیه و تحلیل نظری و مثالهای محاسبه نشان میدهد که MEEMD میتواند سیگنالهای واقعی را حفظ کند، به طور موثر اطلاعات ضمنی زمان-فرکانس را در دنباله تغییر شکل زمین لغزش جدا کند، و تداخل متقابل اطلاعات مرتبط با ویژگیهای مختلف را کاهش دهد. آنتروپی تقریبی می تواند به طور موثر پیچیدگی توالی زمین لغزش را تجزیه و تحلیل کند. دنباله های جدید با پیچیدگی متمایز با بازسازی هر جزء بر اساس مقادیر آنتروپی به دست می آیند. آنها می توانند اطلاعات فرکانس زمانی مختلف توالی های آشفته زمین لغزش را بهتر منعکس کنند و همزمان می توانند مقیاس محاسباتی را کاهش دهند. انتخاب پارامترهای مدل بهینه با استفاده از تئوری بازسازی فضای فاز آشفته و روش جستجوی شبکه ای می تواند به طور موثری دقت پیش بینی را بهبود بخشد. الگوریتم در این مقاله می تواند به خوبی ویژگی های تغییر شکل زمین لغزش را بیان و منعکس کند، به طور موثر مقادیر باقیمانده شدید را کنترل کند و فاصله خطا را کاهش دهد. این الگوریتم نه تنها می تواند دقت پیش بینی جهانی تغییر شکل زمین لغزش را بهبود بخشد، بلکه می تواند دقت پیش بینی محلی خوبی را نیز تضمین کند. این الگوریتم میتواند به خوبی ویژگیهای سیستم پیچیده آشفته را توصیف کند، که راه جدیدی برای بهبود دقت پیشبینی تغییر شکل زمین لغزش ارائه میدهد. از آنجایی که الگوریتم در این مقاله عملکرد چندین روش را ترکیب می کند، پیچیدگی و زمان اجرای مدل را تا حدی افزایش می دهد. این سوال که چگونه می توان سرعت و عملکرد مدل ترکیبی را بیشتر بهبود بخشید، مرحله بعدی است که باید مورد مطالعه قرار گیرد.
منابع
- بهلینگ، ر. روسنر، اس. کافمن، اچ. Kleinschmit، B. نقشه برداری زمین لغزش مکانی-زمانی خودکار در مناطق بزرگ با استفاده از داده های سری زمانی rapideye. Remote Sens. 2014 , 6 , 8026–8055. [ Google Scholar ] [ CrossRef ]
- دو، جی. یاماگیشی، اچ. پورقاسمی، HR; یونس، AP; آهنگ، X. خو، ی. Zhu، Z. یک مدل شبکه عصبی مصنوعی یکپارچه برای ارزیابی حساسیت زمین لغزش جزیره اوسادو، ژاپن. نات خطرات 2015 ، 78 ، 1749-1776. [ Google Scholar ] [ CrossRef ]
- ژو، اس. چن، جی. Fang, L. الگوی توزیع زمین لغزشهای ناشی از زلزله لودیان چین در سال 2014: پیامدهایی برای توپوگرافی آستانه منطقهای و شناسایی گسلهای لرزهزا. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 46. [ Google Scholar ] [ CrossRef ]
- مانفره، لس آنجلس؛ د آلبوکرک نوبرگا، RA; Quintanilha، JA ارزیابی سیستم های طبقه بندی کننده چندگانه برای شناسایی زمین لغزش در تصاویر نقشه برداری موضوعی Landsat (TM). ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 164. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. لی، ایکس. وانگ، ی. چن، جی. لیو، اس. تشخیص زمین لغزش جنگلی با استفاده از داده های LiDAR و الگوریتم جنگل تصادفی: مطالعه موردی سه دره. سنسور از راه دور محیط. 2014 ، 152 ، 291-301. [ Google Scholar ] [ CrossRef ]
- لی، ز. جیائو، کیو. لیو، ال. تانگ، اچ. لیو، تی. نظارت بر خطرات زمینشناسی و بازیابی پوشش گیاهی در منطقه زلزلهزده ونچوان با استفاده از عکسبرداری هوایی. ISPRS Int. J. Geo-Inf. 2014 ، 3 ، 368-390. [ Google Scholar ] [ CrossRef ]
- Akcay، O. ارزیابی استنتاج شکاف زمین لغزش توسط ANFIS و رگرسیون لجستیک با استفاده از فتوگرامتری مبتنی بر UAS. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2131-2158. [ Google Scholar ] [ CrossRef ]
- استامف، ا. Malet، JP; علامند، پ. پیروت-دسیلینی، ام. Skupinski، G. فتوگرامتری چند نمای زمینی برای پایش تغییر شکل زمین لغزش و فرسایش. ژئومورفولوژی 2015 ، 231 ، 130-145. [ Google Scholar ] [ CrossRef ]
- بالابیو، سی. Sterlacchini، S. ماشینهای بردار پشتیبانی برای نقشهبرداری حساسیت زمین لغزش: مطالعه موردی حوضه رودخانه استافورا، ایتالیا. ریاضی. Geosci. 2012 ، 44 ، 47-70. [ Google Scholar ] [ CrossRef ]
- کورتس، سی. Vapnik، V. پشتیبانی از شبکه های برداری. ماخ فرا گرفتن. 1995 ، 20 ، 273-297. [ Google Scholar ] [ CrossRef ]
- ژائو، اچ. کاربرد ماشین بردار پشتیبان در پیشبینی تغییر شکل تونل اطراف سنگ. چانه. جی. راک مکانیک. مهندس 2005 ، 24 ، 649-652. (به زبان چینی) [ Google Scholar ]
- Suykens، JAK; Brabanter، JD; لوکاس، ال. Vandewalle, J. حداقل مربعات وزنی ماشین های بردار را پشتیبانی می کنند: استحکام و تقریب پراکنده. محاسبات عصبی 2002 ، 48 ، 85-105. [ Google Scholar ] [ CrossRef ]
- شی، ج. لیو، ایکس. پیشبینی شاخص مذاب توسط ماشینهای بردار پشتیبان حداقل مربعات وزنی. J. Appl. پلیم. علمی 2006 ، 101 ، 285-289. [ Google Scholar ] [ CrossRef ]
- کوین، اس. جیائو، جی جی؛ وانگ، اس. یک مدل دینامیکی غیرخطی از تکامل زمین لغزش. ژئومورفولوژی 2002 ، 43 ، 77-85. [ Google Scholar ] [ CrossRef ]
- Qin, SQ; جیائو، جی جی؛ Wang, SJ مقیاس زمانی قابل پیش بینی زمین لغزش. گاو نر مهندس جئول محیط زیست 2001 ، 59 ، 307-312. [ Google Scholar ] [ CrossRef ]
- هوانگ، ز. قانون، KT; لیو، اچ. جیانگ، تی. ویژگی های آشفته تکامل زمین لغزش: مطالعه موردی زمین لغزش Xintan. محیط زیست جئول 2009 ، 56 ، 1585-1591. [ Google Scholar ] [ CrossRef ]
- هوویوس، ن. استارک، CP; Tutton، MA; Abbott, LD تکامل شبکه زهکشی زمین لغزش در یک کمربند کوهستانی از پیش مستقر: کوههای فینیستر، پاپوآ گینه نو. زمین شناسی 1998 ، 26 ، 1071-1074. [ Google Scholar ] [ CrossRef ]
- وانگ، ایکس. فن، Q. خو، سی. پیشبینی تغییر شکل سد Li، Z. بر اساس تبدیل موجک و ماشین بردار پشتیبانی. Geomat. Inf. علمی دانشگاه ووهان 2008 ، 33 ، 469-471. (به زبان چینی) [ Google Scholar ]
- لی، ایکس. Xu, J. پیش بینی تغییر شکل زمین لغزش بر اساس تجزیه و تحلیل موجک و LSSVM. جی. جئود. ژئودین. 2009 ، 29 ، 127-130. (به زبان چینی) [ Google Scholar ]
- لیان، سی. زنگ، ز. یائو، دبلیو. تانگ، اچ. مدل پیشبینی جابجایی زمین لغزش بر اساس یک مجموعه اصلاح شده تجزیه حالت تجربی و ماشین یادگیری شدید. نات خطرات 2013 ، 66 ، 759-771. [ Google Scholar ] [ CrossRef ]
- شن، ز. وانگ، کیو. شن، ی. جین، جی. Lin, Y. استخراج لهجه گفتار احساسی بر اساس تجزیه حالت تجربی گروه اصلاح شده. در مجموعه مقالات کنفرانس IEEE Instrumentation & Measurement Technology 2010 (I2MTC)، آستین، TX، ایالات متحده آمریکا، 3-6 مه 2010.
- وو، زی. هوانگ، NE; Chen, X. روش تجزیه حالت تجربی گروه چند بعدی. Adv. سازگار شدن. داده آنال. تئوری کاربردی 2009 ، 1 ، 339-372. [ Google Scholar ] [ CrossRef ]
- Pincus، SM آنتروپی تقریبی به عنوان معیاری از پیچیدگی سیستم. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 1991 ، 88 ، 2297-2301. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ریچمن، جی اس؛ تجزیه و تحلیل سری زمانی فیزیولوژیک مورمن، JR با استفاده از آنتروپی تقریبی و آنتروپی نمونه. صبح. جی. فیزیول. دایره قلب فیزیول. 2000 ، 278 ، 2039-2049. [ Google Scholar ]
- Kennel, MB; براون، آر. آبربانل، HDI تعیین ابعاد تعبیه برای بازسازی فضای فاز با استفاده از ساختار هندسی. فیزیک Rev. A 1992 , 45 , 3403-3411. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لیو، ایکس. جیا، دی. لی، اچ. Jiang, J. تحقیق در مورد بهینه سازی پارامتر هسته دستگاه بردار پشتیبان در تشخیص بلندگو. علمی تکنولوژی انرژی 2010 ، 10 ، 1669-1673. (به زبان چینی) [ Google Scholar ]
- منفرد، م. رستگار، ح. کجا آبادی، HM راهبردی جدید برای پیشبینی سرعت باد با استفاده از روشهای هوشمند مصنوعی. تمدید کنید. انرژی 2009 ، 34 ، 845-848. [ Google Scholar ] [ CrossRef ]
- وو، زی. تجزیه حالت تجربی Huang، NE Ensemble: یک روش تجزیه و تحلیل داده به کمک نویز. Adv. سازگار شدن. داده آنال. 2009 ، 1 ، 1-41. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. یان، آر. گائو، آر ایکس؛ Feng, Z. بهبود عملکرد مجموعه تجزیه حالت تجربی. مکانیک. سیستم فرآیند سیگنال 2010 ، 24 ، 2104-2123. [ Google Scholar ] [ CrossRef ]
- Takens, F. کشف جاذبه های عجیب و غریب در آشفتگی ; سیستم های دینامیکی و آشفتگی، یادداشت های سخنرانی در ریاضیات. Springer: برلین، آلمان، 1981. [ Google Scholar ]
- Li, L. تحقیقات پیشبینی زمین لغزش بر اساس تئوری بازسازی فضای فاز . دانشگاه صنعتی چنگدو: چنگدو، چین، 2008. (به زبان چینی) [ Google Scholar ]

شکل 1. نقشه موقعیت سرزمین دانبا.

شکل 2. دامنه زمین لغزش دانبا.
شکل 3. توالی تغییر شکل جابجایی زمین لغزش.
شکل 4. نتایج تجزیه MEEMD.
شکل 5. آنتروپی تقریبی هر جزء.
شکل 6. دنباله جدید.
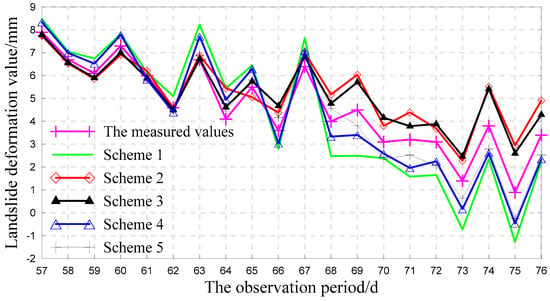
شکل 7. نتایج پیش بینی طرح های 1 تا 5.

شکل 8. نتایج پیش بینی طرح های 6 تا 11.
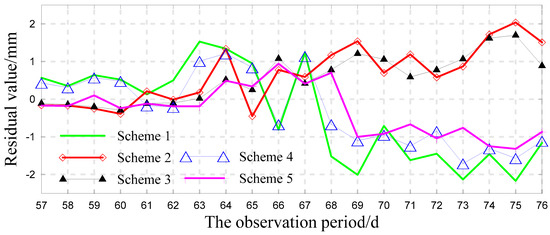
شکل 9. خطاهای پیش بینی طرح های 1 تا 5.
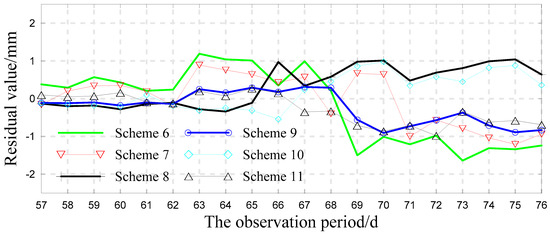
شکل 10. خطاهای پیش بینی طرح های 6 تا 11.

جدول 1. نتایج ترکیبی هر جزء.
جدول 2. آمار توالی های باقیمانده (واحد: میلی متر).
جدول 3. تضاد دقت هر طرح با مراحل مختلف پیش بینی (واحد: میلی متر).
© 2017 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر