1. معرفی
از سال 1994، سازمان خدمات بینالمللی موقعیتیابی جهانی (GPS) (IGS) محصولات دقیقی از مدار و ساعت ماهوارهای GPS را ارائه کرده است که امکان توسعه یک روش موقعیتیابی جدید به نام موقعیتیابی نقطهای دقیق (PPP) را فراهم میکند [1، 2 ] .]. بر اساس پردازش شبه برد غیرمتفاوت و مشاهدات فاز حامل از یک گیرنده GPS، راه حل های موقعیت یابی با دقت در محدوده سانتی متر تا دسی متر را می توان در سطح جهانی به دست آورد. موقعیت یابی دقیق نقطه (PPP) یکی از محبوب ترین تکنیک ها برای موقعیت یابی دقیق مبتنی بر فاز حامل است. PPP گاهی اوقات از ترکیب خطی بدون یونوسفر برای کاهش اثر تاخیر یونوسفر استفاده می کند. با این حال، بر اساس ضرایب صحیح نیست و در حال حاضر، اطلاعات وضعیت ماهیت صحیح ابهامات را حفظ نمی کند. در نتیجه، PPP نمی تواند به اندازه کافی ابهامات را حل کند و به طیف کاملی از دقت فاز حامل سیستم ماهواره ناوبری جهانی (GNSS) دسترسی داشته باشد [ 3 ، 4]]. علاوه بر این، زمانهای مشاهده طولانی برای همگرایی مورد نیاز است [ 5 ]. بسیاری از محققان تلاش کرده اند تا عملکرد PPP را با بهبود دقت مدار ماهواره و محصولات ساعت [ 2 ، 6 ] و سرعت بخشیدن به فرآیند تفکیک ابهام [ 7 ، 8 ، 9 ] بهبود بخشند. در دسترس بودن و یکپارچگی موقعیت یابی ماهواره را می توان با استفاده از چندین GNSS به طور قابل توجهی بهبود بخشید تا ماهواره های بیشتری در دسترس باشند [ 10 ، 11 ، 12 ]. لی و همکاران دقت PPP چند صورت فلکی را آزمایش کرد و چالش های اصلی مرتبط با این فرآیند را مورد بحث قرار داد [ 13 ، 14]. انتظار می رود استفاده از چندین GNSS با بهبود دقت موقعیت یابی و کاهش زمان همگرایی، قابلیت PPP را افزایش دهد.
از زمان آزمایش بینالمللی Globalnaya Navigatsionnaya Sputnikovaya Sistema (GLONASS) (IGEX-98) و پروژه آزمایشی سرویس GLONASS (IGLOS)، دادههای دقیق مدار و ساعت گلوناس در دسترس قرار گرفتهاند. یک برنامه ترکیبی GPS و GLONASS PPP توسط Cai و Gao در سال 2007 توسعه یافت [ 15 ]. تحقیقات بر روی PPP مبتنی بر GPS و GLONASS از آن زمان به طور مداوم انجام شده است، و نتایج نشان داده است که دقت موقعیت یابی و سرعت همگرایی توسط سیگنال صورت فلکی دوگانه بهبود یافته است [16 ، 17 ، 18 ] . سیستم ناوبری ماهوارهای BeiDou (BDS) یک سیستم ناوبری ماهوارهای جهانی است که بهطور مستقل توسط چین توسعه، مستقر و اداره میشود و تا به امروز در حال کار است.19 ]. BDS از دو صورت فلکی ماهواره ای مجزا تشکیل شده است: یک سیستم آزمایشی محدود که از سال 2000 کار می کند و یک سیستم ناوبری جهانی در مقیاس کامل که در حال حاضر در دست ساخت است. جدول 1 ماهواره های صورت فلکی BDS را در دسامبر 2012 یا قبل از آن فهرست می کند. در مجموع، 23 ماهواره درگیر شده اند که 3 تای آنها دیگر عملیاتی نیستند. در حال حاضر 20 ماهواره BDS در حال کار هستند: 6 ماهواره در مدارهای زمین ثابت (GEOs)، 8 ماهواره در مدارهای زمین سنکرون شیبدار 55 درجه (IGSOs) و 6 ماهواره در مدارهای متوسط زمین (MEOs). صورت فلکی کامل قرار است در نهایت از 35 ماهواره تشکیل شود. طبق برنامه برنامه ریزی کلی خود، BDS تا سال 2020 پوشش جهانی خواهد داشت [ 17 ].
محققان [ 20 ، 21 ، 22 ] همچنین مدلی را توسعه داده اند که PPP مبتنی بر GPS و BDS را ترکیب می کند. نتایج آزمایش نشان داد که ترکیب PPP مبتنی بر GPS و BDS می تواند زمان همگرایی را کاهش داده و دقت موقعیت یابی را بهبود بخشد. به دلیل پیشرفت در دقت محصولات مدار و ساعت ماهواره BDS و گالیله، PPP چهار صورت فلکی (GPS، BDS، GLONASS و Galileo) ممکن شده است [ 23 ]. تگدور و همکاران و کای و همکاران [ 24 ، 25 ] عملکرد PPP چهار صورت فلکی را بهبود بخشید. با این حال، بیشتر تحقیقات ذکر شده در بالا به PPP برای یک شی آماری پرداخته است. در این کار به عملکرد PPP برای یک کاربر سینماتیک پرداخته شده است.
در این مطالعه، ما عملکرد PPP سینماتیک چند صورت فلکی را از نظر دقت موقعیتیابی و زمان همگرایی با استفاده از اندازهگیریهای جمعآوریشده از گیرندههای یک وسیله نقلیه ارزیابی کردیم. مدل PPP سینماتیک چند صورت فلکی، فیلتر کالمن و مدلهای تصادفی اعمال شده در اینجا در بخش دوم معرفی میشوند. بخش سوم استراتژی پردازش دادههای PPP سینماتیک چند صورت فلکی را شرح میدهد. عملکرد PPP سینماتیک چند صورت فلکی با اعمال آن بر داده های واقعی در بخش چهارم، که با نتیجه گیری دنبال می شود، روشن می شود.
2. مدل PPP چند صورت فلکی
در این مطالعه، ما یک نرمافزار PPP را توسعه دادیم و چندین آزمایش از دقت و پایداری پردازش دادهها با استفاده از این نرمافزار PPP انجام دادیم. نتایج نشان داد که دقت موقعیتیابی آماری میتواند در جهت افقی به سطح میلیمتری و در جهت عمودی به سطح سانتیمتری برسد. ریشه میانگین مربعات (RMS) مقدار تاخیر تروپوسفر بین 0.01 متر و 0.02 متر بود. زمان همگرایی در درجه اول از 10 دقیقه تا 40 دقیقه توزیع شد. این آزمون ها در مقاله تحقیقاتی آینده تشریح خواهند شد. در مقایسه با سایر نرمافزارهای منبع باز PPP، این نرمافزار میتوانست حجم زیادی از دادهها را پردازش کند و از محصولات دقیق ارائهشده توسط IGS، Multi-GNSS Experiment (MGEX) و بینالمللی GNSS Monitoring & Assessment System (iGMAS) استفاده میکند. طراحی ساختار نرم افزار ما ساده تر بود و از ثبات خوبی برخوردار بود. در این قسمت معادله مشاهده، مدل فیلتر کالمن و مدل تصادفی مورد استفاده در نرم افزار ما به طور مفصل مورد بحث قرار می گیرد.
2.1. چند صورت فلکی PPP
مشاهدات ترکیبی بدون یونوسفر معمولاً در PPP برای حذف تاخیر یونوسفر مرتبه اول استفاده می شود. کد و مشاهده فاز حامل آنها را می توان به صورت زیر بیان کرد:
که در آن f i ( i = 1، 2) فرکانس های فاز حامل در هرتز هستند. ρ i مشاهده کد در فرکانس i در متر است. ϕمن�منمشاهده فاز حامل در چرخه است. dt ساعت گیرنده بر حسب ثانیه است. dT ساعت ماهواره ای بر حسب ثانیه است. c سرعت نور بر حسب متر بر ثانیه است. T trop تاخیر تروپوسفر بر حسب متر است. N IF پارامترهای ابهام شناور پس از تعریف مجدد هستند. R محدوده هندسی بر حسب متر است. ερ��و εϕ��کد و نویز مشاهده فاز حامل، به ترتیب، از جمله چند مسیر بر حسب متر هستند. و λ IF طول موج پس از تعریف مجدد است.
فرمول خطی سازی معادله (1) به صورت زیر است:
در رابطه (2)، r محدوده هندسی محاسبه شده با استفاده از نقطه خطی سازی است. MF تابع نقشه برداری است. T ztd تاخیر مرطوب تروپوسفر اوج است. ρ IF مشاهدات کد هستند. و Φ IF مشاهدات حامل هستند. x i , y i , z i موقعیت ماهواره ها و x p , y p , z p مختصات ایستگاه ها هستند.
سپس، حداقل مربعات باقیمانده را می توان به صورت زیر نوشت:
که در آن پارامترهای dX p ، dt ، T ztd و N IF به ترتیب موقعیت گیرنده، افست ساعت گیرنده، تاخیر مرطوب تروپوسفر اوج و ابهام ترکیب بدون یونوسفر هستند. ب ، الف ، م ، و λ�به ترتیب ماتریس های ضریب مربوطه هستند. Vρ Iاف��منافو Vϕ مناف��منافباقی مانده های مشاهده هستند.
برای PPP سینماتیک چند صورت فلکی، بایاس های تاخیر سخت افزاری کد باید در ساعت گیرنده و اختلاف زمانی سیستم جذب شوند و بایاس های فاز حامل مربوط به فرکانس باید در ابهام جذب شوند. علاوه بر این، اختلاف زمان سیستم و افست ساعت گیرنده به صورت خطی همبستگی داشتند. به طور کلی، به جای تخمین پارامتر ساعت گیرنده برای هر مشاهده سیستم ماهواره ای، ما همیشه یک پارامتر اختلاف زمانی سیستم را برای منعکس کردن تفاوت بین زمان های مختلف سیستم معرفی می کنیم. معادلات رصدی PPP سینماتیک چند صورت فلکی را می توان به صورت زیر بیان کرد:
جایی که Vρ Iاف��منافو VΦ Iاف�Φمنافباقیمانده های مشاهده GPS هستند. Vρ Iاف1��مناف1و Vϕ مناف1��مناف1باقیمانده سایر ماهواره های ناوبری هستند اما ماهواره های GPS نیستند. Lρ Iاف ��منافو Lρ Iاف1��مناف1به ترتیب مشاهدات کد بدون یونوسفر از GPS و GNSS دیگر هستند. Vϕ مناف��منافو Vϕ مناف1��مناف1آیا فازهای حامل بدون یونوسفر قابل مشاهده هستند. برای ب1ب1، λo t h e r ��تیساعته� ماتریس ضریب مربوط به سایر ماهواره های ناوبری است. dt gps ساعت افست GPS است و دتیo t h e rدتی�تیساعته�پارامتر اختلاف زمانی سیستم است. در آزمونهای انجامشده در این مطالعه، ابهامات بهعنوان ثابت در نظر گرفته شدند (با فرض عدم لغزش چرخه)، و سایر پارامترها همگی وابسته به دوره هستند، همانطور که در رابطه (4) نشان داده شده است.
ترکیب چندین GNSS با برخی مسائل مرتبط است، مانند یکپارچه سازی سیستم مرجع زمانی، سیستم های مرجع مختصات، و بایاس های بین فرکانس. این مسائل همچنین چالشهایی را نشان میدهند که بر PPP چند صورت فلکی تأثیر میگذارند. از آنجایی که هر GNSS فرکانسها و ساختار سیگنال متفاوتی دارند، مقادیر بایاس کد در گیرندههای چندگانه GNSS متفاوت است. این سوگیری ها، سوگیری های بین سیستمی برای مشاهده کد هستند. تأخیرهای فاز نیز متفاوت هستند و تفاوتهای آنها نشاندهنده تعصبات بین سیستمی برای مشاهدات فاز است. ماهوارههای GLONASS سیگنالهای خود را در فرکانسهای جداگانه منتشر میکنند، که همچنین منجر به سوگیریهای وابسته به فرکانس در گیرندهها میشود. برای ماهوارههای GLONASS با فاکتورهای فرکانس مختلف، بایاس کد گیرنده با بایاس فاز حامل متفاوت است. این تفاوت ها معمولاً بایاس بین فرکانس نامیده می شوند. هر دو سوگیری بین سیستمی و بین فرکانسی باید در تجزیه و تحلیل ترکیبی داده های چند GNSS در نظر گرفته شوند. پارامترهای مربوطه باید برای همه گیرندههای چند GNSS برآورد شوند: یک بایاس برای اندازهگیری کد هر سیستم و هر فرکانس برای GLOANSS. با این حال، بایاس های بین سیستمی/بین فرکانسی و ساعت های ماهواره ای به دست آمده کاملاً همبسته هستند. در نتیجه، هنگامی که از ساعت های ماهواره ای استفاده می شود، بایاس های مربوطه نیز باید برای این گیرنده های GNSS برآورد یا اصلاح شوند. لازم به ذکر است که چنین سوگیری داخلی گیرنده فقط هنگام پردازش داده های کد مربوط می شود. در واقع، هنگام تجزیه و تحلیل اندازهگیریهای فاز، پارامترهای ابهام فاز مربوطه، تأخیرهای فاز را جذب میکنند.
2.2. مدل فیلتر کالمن
در این مطالعه از فیلتر کالمن برای پردازش PPP سینماتیک چند صورت فلکی استفاده شد. معادله وضعیت سیستم موقعیت یابی پویا GNSS و معادله مشاهده عبارتند از:
جایی که i زمان t i است ، و Xi و Xi -1 بردارهای حالت m × 1 در t i و t i-1 هستند . m تعداد پارامترها است. Φمن ، من – 1Φمن،من–1یک ماتریس انتقال حالت ابعادی m×m است. و W i یک بردار نویز سیستم است که از توزیع نرمال چند متغیره صفر میانگین با کوواریانس گرفته شده است. Σدبلیومن�دبلیومن. L i ماتریس بردار طراحی مشاهده است و e i خطای اندازه گیری است. P i یک ماتریس وزن است.
مراحل درگیر در فیلتر کالمن به شرح زیر است [ 26 ، 27 ]:
(1) فروشگاه ایکس^من – 1ایکس^من–1و ∑ایکس^من – 1∑ایکس^من–1در t i-1
(2) برآورد وضعیت پیش بینی شده (پیشینی):
(3) تخمین کوواریانس پیش بینی شده (پیشینی):
(4) نوآوری یا اندازه گیری باقیمانده و کوواریانس:
(6) برآورد وضعیت به روز شده (پسینی):
(7) کوواریانس تخمینی به روز شده (پسینی):
(8) اجازه دهید I = i + 1 و سپس تا پایان داده ها به مرحله اول برگردید.
مدلهای تصادفی مناسب برای مشاهدات و مدلهای دینامیکی برای بردار حالت باید در فیلتر کالمن ارائه شوند. مدل تصادفی معمولاً با استفاده از یک ماتریس کوواریانس مناسب تعریف می شود که ویژگی های آماری اندازه گیری ها را توصیف می کند [ 28 ]. در بخش بعدی مدلهای تصادفی مورد استفاده در این تحقیق به تفصیل معرفی میشوند.
مدل سینماتیکی مورد استفاده در مدل دینامیکی شتاب ثابت است:
جایی که r ( t )r(تی)یک بردار ناشناخته است، r( تی )“r(تی)“سرعت است و Δ tΔتیطول زمان شتاب است.
در نرم افزار ما، پارامترهای مختصات، ساعت گیرنده، تاخیر تروپوسفر و ابهام پارامترهای ناشناخته بودند. این پارامترها با استفاده از فرآیند تصادفی مرتبه اول گاوس-مارکف (GM) برآورد شدند. اگر هیچ چرخه لغزشی رخ نداد، ما ابهام را به عنوان یک ثابت در نظر گرفتیم. ما در نرم افزار خود فقط اطلاعات دوره فعلی و دوره بعدی را ذخیره می کردیم و پارامترهای هر دوره را تخمین می زدیم. بحث در مورد واریانس نویز دینامیکی پارامترهای مرتبط به شرح زیر است:
فرآیند GM مرتبه اول گسسته عبارت است از:
که در آن x بردار حالت است، آرایکسک=ه– Δ t / τℜایکسک=ه–Δتی/�، τ زمان همبستگی، ω دنباله نویز سفید با مقدار میانگین صفر و △ t بازه زمانی است.
بطور کلی، β=1τ، β �=1�، �ضریب میرایی است. اگر ضریب میرایی بیش از حد بزرگ باشد، دوره فعلی و دوره بعدی نوسانات بیشتری خواهند داشت. با این حال، این دو دوره همبستگی زمانی قوی دارند.
ماتریس واریانس نویز پویا به صورت زیر است:
جایی که q است� استچگالی طیفی یا ماتریس واریانس نویز پویا. زمانی که زمان همبستگی τ�معادله (15) صفر است، مدل نویز سفید خالص را نشان می دهد. اگر τ�بی نهایت است، فرآیند فیلتر کردن یک پیاده روی تصادفی خالص است.
به طور کلی، پیادهرویهای تصادفی خالص برای شبیهسازی مختصات و ابهامات سهبعدی مناسب هستند، جایی که تاخیر تروپوسفر و گیرنده را میتوان به دو شکل مدلسازی کرد.
برای PPP استاتیک بدون سرعت و شتاب، بردار پارامتر حالت:
ماتریس انتقال حالت مربوطه، Φk + 1 ، kΦک+1،کو ماتریس واریانس نویز پویا مختصات موقعیت سه بعدی عبارتند از:
جایی که:
qφ��: چگالی طیفی عرضی;
qλ��: چگالی طیفی طولی;
qساعت�ساعت: چگالی طیفی ارتفاع;
آرمترآرمتر: شعاع انحنای نصف النهار;
آرnآر�: شعاع انحنا روی دایره گنبد; و
ساعتساعت: ارتفاع ایستگاه.
ماتریس واریانس نویز دینامیک گیرنده به شرح زیر است:
اگر یک پیاده روی تصادفی خالص است:
اگر نویز سفید خالص باشد:
جایی که qدتی�دتیچگالی ساعت گیرنده است و βدتی�دتیضریب میرایی مربوطه است.
به طور کلی، تاخیر اوج تروپوسفر به صورت یک پیاده روی تصادفی خالص بیان می شود و بنابراین، واریانس نویز دینامیکی آن عبارت است از:
جایی که qt r o p�تی��پچگالی طیفی تاخیر مرطوب اوج تروپوسفر است. پارامتر ابهام را می توان به عنوان یک ثابت در نظر گرفت: سن= 0سن=0.
برای PPP پویا، پارامترهای حالت باید شامل پارامترهای سرعت و شتاب باشد و ماتریس مربوطه باید تغییر کند. بنابراین، پارامترهای بردار حالت باید به صورت زیر باشد:
ماتریس انتقال حالت مربوطه به صورت زیر است:
جایی که:
2.3. مدل های تصادفی
تصحیح خطا بر عملکرد PPP تأثیر می گذارد. برخی از اصلاحات را می توان با استفاده از مدل های تابع حذف کرد، که در بخش 3 مورد بحث قرار گرفته است . با این حال، مدل های تابع برای بهبود دقت و زمان همگرایی PPP کافی نیستند. در نتیجه، یک مدل تصادفی مناسب باید اعمال شود. مدلهای تصادفی مختلف نتایج PPP متفاوتی را منعکس میکنند. به طور کلی، سه مدل تصادفی رایج وجود دارد: مدل تصادفی هم وزن، مدل تصادفی مبتنی بر نرخ نویز حامل و مدل تصادفی مبتنی بر زاویه ارتفاع. در این تحقیق آخرین مدل مورد استفاده قرار گرفت.
بیشتر خطاهای مشاهده GNSS (یعنی تأخیر انکسار تروپوسفر، تأخیر شکست یونوسفر و اثر چند مسیره) مربوط به زوایای ارتفاع ماهوارهها است. برای کاهش این خطاها می توان مدل های تصادفی بر اساس زوایای ارتفاعی ماهواره ها ایجاد کرد. مدلهای تصادفی مبتنی بر زاویه ارتفاع عمدتاً شامل مدلهای تابع مثلثاتی و مدلهای تابع نمایی میشوند [ 29 ]. در این مطالعه، ما از مدل تصادفی زاویه ارتفاع مبتنی بر تابع سینوسی استفاده کردیم که با معادله (30) توضیح داده شده است:
که در آن θ زاویه ارتفاع ماهواره است و σ20�02واریانس قبلی مشاهدات است.
به طور کلی، نویز مشاهده چند مسیره و بزرگ در زوایای ارتفاع کم وجود دارد. ما بخش وزن را برای کاهش وزن مشاهدات در زوایای ارتفاع کمتر تعریف کردیم. کد مربوطه و ماتریس های واریانس فاز حامل عبارتند از:
جایی که σ2پ، 0�پ،02و σ2ϕ ، 0��،02به ترتیب واریانس های قبلی مشاهدات فاز کد و حامل هستند. α آستانه زاویه ارتفاع است و معمولاً روی 30 درجه تنظیم می شود. هنگامی که کد و مشاهدات فاز حامل را به طور همزمان اتخاذ می کنیم، عبارت واریانس کوواریانس به صورت زیر است:
لازم به ذکر است که GNSS های مختلف دارای واریانس مشاهدات قبلی متفاوتی هستند. برای کد GPS و GLONASS و مشاهدات فاز حامل، دقت به ترتیب 0.3 متر و 0.002 متر تنظیم شده است. از آنجایی که مدار و ساعت ماهواره BDS دقت نسبتاً کمتری دارند [ 30 ، 31 ]، اندازهگیریهای آنها کم وزن است. یعنی دقت مشاهده فاز روی 0.004 متر و دقت مشاهده کد برای BDS روی 0.6 متر تنظیم شده است [ 25 ].
3. استراتژی پردازش داده PPP سینماتیک چند صورت فلکی
در این مطالعه از یک نرم افزار PPP خود توسعه یافته برای پردازش داده ها استفاده شد. در اینجا، پیش پردازش داده ها مستقیماً بر دقت نتایج موقعیت یابی تأثیر می گذارد. خطای حذف شده و مدل مورد استفاده در این مطالعه در جدول 2 نشان داده شده است .
خطاهای تأخیر یونوسفر مرتبه اول با استفاده از مشاهدهپذیرهای ترکیبی بدون یونوسفر در نرمافزار PPP خود توسعهیافته ما حذف شدند. تأخیر تروپوسفری هیدرواستاتیک (خشک) بر اساس مشاهدات با استفاده از مدل UNB3m [ 32 ] تصحیح شد، در حالی که بخش غیر هیدرواستاتیک (تر) به عنوان یک پارامتر برآورد شد. توابع نگاشت نیل [ 35 ] برای طرح ریزی از تاخیرهای مایل تا تاخیر اوج استفاده شد. آفست مرکز فاز گیرنده و آنتن ماهواره (PCO) و تغییرات مرکز فاز (PCV) با استفاده از پارامترهای ارائه شده توسط IGS ANTEX جمعآوری شد. علاوه بر این، MGEX IGS GNSS های جدید را بررسی کرد [ 21]. در این مطالعه، ما از مدار ماهوارهای چند صورت فلکی و محصولات ساعت از MGEX برای کاهش خطاهای مدار و ساعت ماهواره استفاده کردیم.
پارامترهای اصلی PPP شامل مختصات، پارامتر تاخیر تروپوسفر اوج، پارامترهای اختلاف زمانی سیستم چند صورت فلکی و ابهامات بود. برای تخمین پارامترهای استاتیکی و سینماتیکی، نرم افزار ما از مدل فیلتر کالمن استفاده کرد. زاویه برش روی 10 درجه تنظیم شد. برای کاهش زمان همگرایی و استفاده کامل از اطلاعات رصد ماهواره ای، زمانی که لغزش چرخه رخ داد، ماهواره را به عنوان یک ماهواره جدید در نظر گرفتیم. تشخیص لغزش چرخه و تعمیر با استفاده از ترکیب MW و ترکیب بدون هندسه انجام شد. این نرم افزار به طور خودکار ماتریس مقیاس بندی را بر اساس حرکات ماهواره برای بهبود کارایی محاسباتی محاسبه کرد. به طور همزمان، نرم افزار به طور خودکار پارامترها را با توجه به حالت استاتیک یا پویا تنظیم می کند.
4. تحلیل عملکرد PPP سینماتیک چند صورت فلکی
4.1. شرح داده های تجربی
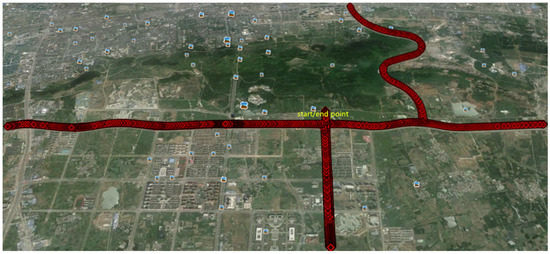
برای ارزیابی در دسترس بودن PPP سینماتیک چند صورت فلکی اعمال شده برای اجرام دینامیکی، یک آزمایش PPP سینماتیک چند صورت فلکی در 18 ژانویه 2015 در Huainan، چین انجام شد. مشاهدات GNSS سینماتیک در مدت 2 ساعت از سه گیرنده نصب شده بر روی یک وسیله نقلیه جمع آوری شد. سرعت خودرو تقریبا 20 کیلومتر بر ساعت بود. گیرنده ها دستگاه های Hi-Target V8 (TRM59800.00 NONE) بودند که می توانند مشاهدات GPS، BDS و GLONASS را جمع آوری کنند. فاصله نمونه گیری 1 ثانیه بود. شکل 1مسیر وسیله نقلیه را نشان می دهد که از “نقطه شروع” شروع شده و از هر بخش دو بار عبور کرده است. برای بررسی دقت نتیجه PPP، ما همچنین یک ایستگاه پایه با همان نوع گیرنده و آنتن در نقطه شروع تنظیم کردیم تا مختصات ایستگاه مریخ نورد را با دقت در سطح سانتی متر با استفاده از کینماتیک دوتفاوت زمان واقعی تعیین کنیم. RTK) رویکرد. محیط اطراف به طور کلی برای رصد خوب بود و دید آسمان بسیار بالا بود. مدار و ساعت ماهواره ای ترکیبی چند صورت فلکی، محصولات ارائه شده توسط Deutsches GeoForschungsZentrum (GFZ) (آلمان) برای پردازش داده های PPP پذیرفته شد. لازم به ذکر است که هیچ فایل تصحیح PCO و PCV آنتن گیرنده BDS برای آنتن ذکر شده در بالا موجود نبود. در نتیجه، نتایج موقعیتیابی BDS PPP حاوی یک خطای سیستمیک بود.
4.2. نتایج و تجزیه و تحلیل
4.2.1. در دسترس بودن چند صورت فلکی سینماتیک PPP
برای بررسی مزایای PPP چند صورت فلکی، در دسترس بودن بر حسب تعداد ماهوارههای قابل مشاهده و مقدار رقت موقعیتی دقت (PDOP) تجزیه و تحلیل شد، که برای کمی کردن دقت موقعیتیابی GNSS مهم است [25 ] .
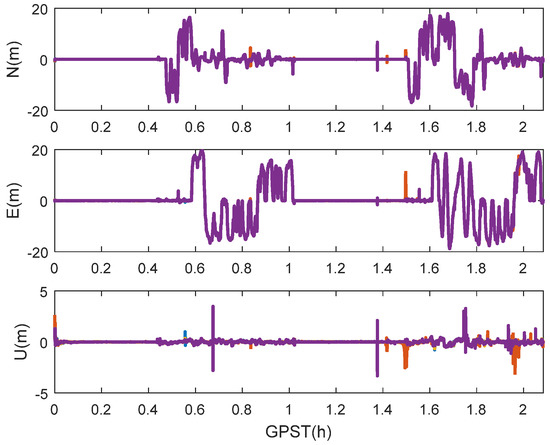
شکل 2 تعداد ماهواره های قابل مشاهده و مقادیر PDOP را برای هر مورد پردازش نشان می دهد. G فقط نشان دهنده GPS، G + R نشان دهنده ترکیب GPS/GLONASS، G + C نشان دهنده ترکیب GPS/BDS، و G + R + C نشان دهنده ترکیب GPS/GLONASS/BDS (همانطور که در زیر ذکر شد). همانطور که در این شکل نشان داده شده است، هندسه فقط GPS ضعیف تر از سه سیستم ترکیبی بود. بزرگترین مقدار PDOP GPS 20 بود، در حالی که مقدار PDOP ترکیب GPS/GLONASS/BDS همیشه زیر 5 بود. تعداد ماهوارهها و مقادیر PDOP چهار سیستم در 0.4 ساعت اول بسیار پایدار و از 1.1 تا 1.5 ساعت در مقابل، تغییرات بسیار مکرر در طول بقیه دوره آزمایشی رخ داد. دلیل این نتیجه این بود که وسیله نقلیه برای 0.4 ساعت اول و 1.1-1.5 ساعت در حالت استاتیک باقی ماند.شکل 3 نیز این وضعیت را توضیح می دهد، زیرا افزایش مختصات را در جهت شمال، شرق و بالا نشان می دهد.
4.2.2. دقت موقعیت یابی و RMS فیلتر کالمن
برای ارزیابی دقت موقعیتیابی سینماتیکی PPP چند صورت فلکی، نتایج RTK تفاوت دوگانه به عنوان مختصات واقعی در نظر گرفته شد. این نتایج با استفاده از وضوح جفت شده GNSS/INS نرم افزار Inertial Explorer 8.60 (IE 8.60)، با استفاده از سیگنال های چند صورت فلکی محاسبه شد. دقت موقعیت یابی این نرم افزار می تواند به 1-2 سانتی متر برسد. شکل 4 a نتایج موقعیت یابی PPP و RTK سینماتیک چند صورت فلکی را نشان می دهد. وقتی در شکل 4 روی آن زوم کردیمb، متوجه شدیم که موقعیت GPS تنها با موقعیت RTK بسیار متفاوت است. همچنین خطای کمی در نتایج GPS/GLONASS PPP وجود داشت. موقعیت های GPS/BDS و GPS/GLONASS/BDS بسیار شبیه به موقعیت های RTK بود. تفاوت بین این مختصات RTK و نتایج PPP فقط GPS، GPS/GLONASS، GPS/BDS و GPS/GLONASS/BDS برای ارزیابی عملکرد PPP سینماتیک چند صورت فلکی با جزئیات مقایسه شد. میانگین مربعات خطاهای این تفاوت ها در جدول 3 نشان داده شده است . از جدول 3می بینیم که میانگین مربعات خطای GPS در جهت شرق و شمال به ترتیب 0.045 متر و 0.085 متر بوده که بسیار بزرگتر از GPS/BDS است. با ترکیب GPS/BDS، دقت به ترتیب 71.11% و 41.18% نسبت به GPS فقط در جهت شمال و شرق بهبود یافته است. با این حال، دقت موقعیت یابی GPS/GLONASS کمی ضعیف تر از GPS/BDS بود. دلیل آن این است که ماهوارههای GPS/BDS بیشتر از GPS/GLAONSS قابل مشاهده هستند و PDOP GPS/BDS بهتر از GPS/GLAONSS بود ( شکل 2 ). دقت GPS/GLONASS/BDS PPP با 30.77% و 56.00% بهتر از GPS/BDS بود.
انحراف استاندارد (STDs) این تفاوت ها در جدول 4 نشان داده شده است و مختصات مرجع نتایج موقعیت یابی RTK هستند. STD های کوچکتر نشان دهنده نتایج بهتر است. همانطور که در جدول 4 نشان داده شده است ، STD سیستم فقط GPS نسبتاً بزرگ بود زیرا تعداد ماهواره های قابل مشاهده کم بود ( شکل 2 ). در مقابل، STD GPS/GLONASS/BDS PPP به وضوح بهترین بود.
4.2.3. زمان همگرایی
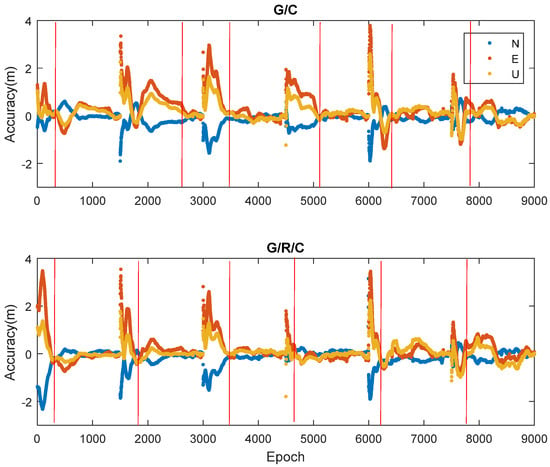
برای ارزیابی عملکرد همگرایی PPP سینماتیک چند صورت فلکی، از مجموعه داده ها در فواصل پنج دقیقه ای (یعنی 12 بار در ساعت) شروع کردیم تا همگرایی به دست آمد. در این مطالعه، فیلتر موقعیت زمانی همگرا در نظر گرفته شد که خطاهای موقعیت یابی به 0.1 ± متر رسید و در آن محدوده باقی ماند. جدول 5 میانگین زمان همگرایی RTK را نشان می دهد. شکل 5 و شکل 6خطاهای موقعیت یابی PPP سینماتیکی چهار مورد مختلف پردازش را نشان می دهد. در این شکلها، ما فقط عملکرد همگرایی PPP را بر اساس شش تکرار به دلیل محدودیتهای فضا ارائه میکنیم. زمان همگرایی به عنوان دوره از دوره اول تا دوره همگرا (به عنوان یک خط قرمز در این شکل ها مشخص شده است) تعریف شد. بر اساس این ارقام و جدول، متوجه شدیم که PPP فقط با GPS نسبت به سایر موارد پردازش به زمان بیشتری برای همگرایی نیاز دارد. در مقابل، عملکرد همگرایی سیستم GPS/GLONASS/BDS برای هر سه جزء مختصات بهترین بود. نسبت به PPP فقط GPS، زمان همگرایی GPS/GLONASS و GPS/BDS PPP، به ویژه در جهت شرق بهبود یافته است. این نتیجه بسیار شبیه به نتایج Cai و همکاران بود. [ 22 ].
5. نتیجه گیری ها
در این مطالعه، عملکرد PPP سینماتیک چند صورت فلکی از نظر دقت موقعیتیابی و زمان همگرایی مورد ارزیابی قرار گرفت. یک مجموعه داده تجربی سینماتیک با استفاده از یک نرمافزار خود توسعهیافته بر اساس مدل PPP سینماتیک چند صورت فلکی، فیلتر کالمن و مدلهای تصادفی پردازش شد. با توجه به بحث های فوق، به نتایج زیر رسیدیم:
-
در دسترس بودن PPP سینماتیک چند صورت فلکی به طور قابل توجهی بهتر از PPP فقط با GPS بود، زیرا ماهواره های بیشتری قابل مشاهده بودند و PDOP بهتر بود.
-
دقت PPP سینماتیک چند صورت فلکی بیشتر از PPP فقط GPS، GPS/BDS و GPS/GLONASS PPP بود. دقت موقعیت یابی GPS/GLONASS PPP کمی کمتر از GPS/BDS PPP بود.
-
عملکرد همگرایی GPS/GLONASS/BDS سینماتیک PPP برای هر سه مولفه مختصات، به ویژه در جهت شرق بهترین بود.
-
PPP سینماتیک چند صورت فلکی می تواند یک سرویس موقعیت یابی با دقت در سطح سانتی متر برای کاربران پویا ارائه دهد.







بدون نظر