

خلاصه
یونوسفر ؛ مدل کلوبوچار ; مدل هموارسازی نمایی Holt–Winters ; منطقه چین
1. معرفی
2. روش مدل پیچیده
2.1. مدل مشاهده فرکانس دوگانه
هچ در ابتدا یک الگوریتم پرکاربرد را برای هموارسازی محدوده شبه کد با استفاده از اندازهگیریهای فاز حامل پیشنهاد کرد [ 30 ]. یک عامل وزن هموارسازی وابسته به دوره (SWF) بیشتر برای بهبود این الگوریتم معرفی شده است [ 31 ]. اصلاح بیشتر در این الگوریتم با کاهش SWF با یک مقدار ثابت با افزایش تعداد دورههای داده GPS مورد استفاده برای هموارسازی انجام میشود [ 32 ]. در مقایسه با دادههای TEC که هموار نمیشوند، دادههای TEC صاف شده معمولاً بهبود چند TECu را در دقت نشان میدهند. الگوریتم این مدل به شرح زیر است:
برای ارزیابی دقت اندازهگیری شبه برد کد هموار، شکل تحلیلی بسط یافته معادله (1) باید ایجاد شود. شروع از شرایط اولیه از پ(تی1)s m=ω1پ(تی1)�(�1)��=�1�(�1)در اولین دوره، عبارت توسعه یافته زیر را می توان برای اندازه گیری کد هموار در دوره استخراج کرد تیمن�من:
هنگامی که اندازهگیریهای شبه برد کد هموار در باند L1 و L2 بدست آمد، محتوای الکترون کل یونوسفر را میتوان به صورت زیر بدست آورد [ 33 ]:
علاوه بر این، TEC مشتق شده از فرکانس دوگانه، TEC مایل (STEC) در طول مسیر سیگنال بین ماهواره و گیرنده روی زمین است. برای رهایی STEC از وابستگی به هندسه مسیر پرتو از ماهواره به گیرنده از طریق یونوسفر، لازم است STEC را به TEC عمودی (VTEC) تبدیل کنید. در عین حال، VTEC پارامتر مهمتری برای مشخص کردن TEC در یک موقعیت گیرنده معین است و به عنوان یک شاخص خوب برای یونیزاسیون کلی یونوسفر زمین استفاده می شود [ 35 ]. از این رو، از رابطه (4) برای تبدیل STEC به VTEC با فرض اینکه یونوسفر معادل پوسته نازکی است که زمین را احاطه کرده است، با مرکز آن مشابه با زمین استفاده می شود [36 ] . از نظر زاویه اوج χ“�”در نقطه قطعه قطعه یونوسفر (IPP) و زاویه اوج χ�در موقعیت گیرنده روی زمین، رابطه بین STEC و VTEC را می توان به صورت زیر نشان داد:
جایی که
2.2. مدل کلوبوچار
BKM با استفاده از خواص آماری تغییرات یونوسفر تشکیل می شود. الگوریتم BKM [ 5 ] در رابطه (6) آورده شده است:
در معادله (6) من( تی )من(تی)نشان دهنده مقدار تاخیر یونوسفر عمودی، در واحد ثانیه است. آ1آ1مقدار ثابت در شب را با مقدار 5 ns نشان می دهد. آ2آ2دامنه تابع کسینوس را در طول روز نشان می دهد و می تواند از آن محاسبه شود αn��در گذر زمان پخش (معادله (7))؛ آ3آ3فاز اولیه را نشان می دهد و همیشه زمان مقدار افراطی است (در اینجا، زمان 14:00 LT (50400 ثانیه) است). آ4آ4چرخه تابع کسینوس را نشان می دهد و می توان از آن محاسبه کرد βn��در گذر زمان پخش (معادله (8))؛ و تیتیزمان محلی نقطه تقاطع بین یونوسفر و خط بین ماهواره و گیرنده را نشان می دهد:
2.3. مدل هموارسازی نمایی Holt–Winters تا مدل Klobuchar پیچیده
مدل هموارسازی نمایی Holt-Winters [ 39 ] توسط Holt در سال 1957 توسعه یافت. این مدل به طور گسترده در بسیاری از مناطق دیگر استفاده شده است [ 40 ، 41 ، 42 ]. مدل فرض می کند که تمام داده های شناخته شده می توانند بر داده هایی که قرار است پیش بینی شوند تأثیر بگذارند. با این حال، داده های اخیر بر داده های پیش بینی بیشتر از داده های آینده تأثیر می گذارد. تأثیر در یک سری هندسی با تغییر زمان متفاوت است. بیان مدل غیر فصلی به شرح زیر است:
پس از انجام آزمایشهای مکرر فراوان، این مطالعه در نهایت از دادههای مشاهداتی شش روزه ارائه شده توسط ایستگاههای IGS ( ftp://cddis.gsfc.nasa.gov ) برای محاسبه مقادیر VTEC با استفاده از BKM و DM استفاده میکند. ابتدا، تفاوت بین BKM و DM در هر دوره از شش روز قبل محاسبه می شود. دوم، مدل هموارسازی نمایی Holt-Winters برای پیشبینی تفاوتها در هر دوره از روز هفتم استفاده میشود. در نهایت، داده های پیش بینی هر دوره برای توسعه مدل پیچیده کلوبوچار (SKM) استفاده می شود. الگوریتم مورد استفاده در رابطه (10) به دست می آید:
اینجا،
3. نتایج و بحث
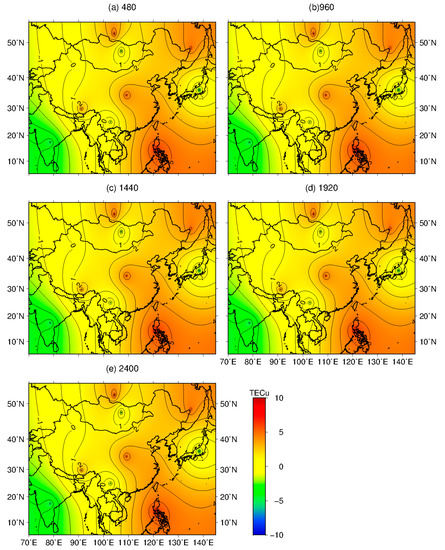
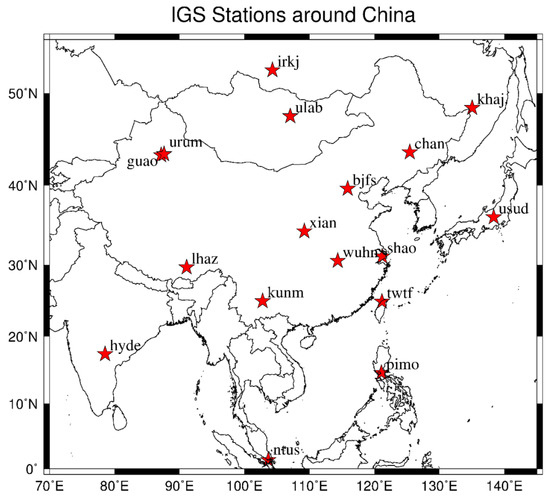
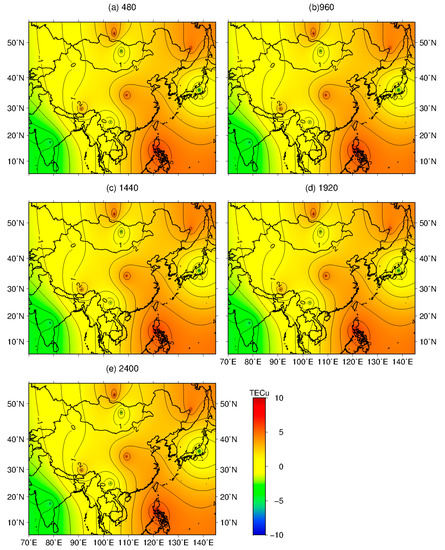
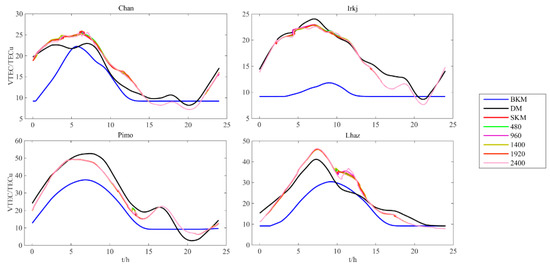
برای ایجاد مدل پیچیده Klobuchar در چین، این مطالعه ده ایستگاه IGS در چین و هفت ایستگاه IGS در سراسر چین را انتخاب میکند ( شکل 1 ). داده های مشاهده از روز سال (DOY) 095 تا 101 در سال 2011 است. روش پیچیده هر ایستگاه در بخش 2.3 ذکر شده است.. علاوه بر این، این مطالعه یک روز را به شش دوره زمانی تقسیم می کند. هر دوره شامل 4 ساعت (480 دوره) است. ما پارامترهای آماری را در دوره های زمانی 4 ساعت در هر ایستگاه محاسبه کردیم. برای هر دوره زمانی، میانگین بایاس (معادله (12)) بین BKM یا SKM و DM در هر ایستگاه، میانگین نرخ اصلاحی (معادله (13)) بین BKM یا SKM و DM در هر ایستگاه و ریشه میانگین مربعات خطا (RMSE، معادله (14)) در هر ایستگاه برای آزمایش نتیجه تصحیح شده. واحد بایاس TECu، واحد نرخ اصلاحی درصد (%) و واحد RMSE TECU است. در همان زمان، یک الگوریتم شبکهبندی انحنای پیوسته [ 43تکنیک ] نقشه برداری برای به دست آوردن VTEC در سراسر چین از نقطه ایزوله استفاده می شود. این روشی است که به طور گسترده در علم زمین استفاده می شود و می تواند اطلاعات اولیه هر نقطه ایزوله را حفظ کند.
3.1. نتیجه مدلینگ در چین
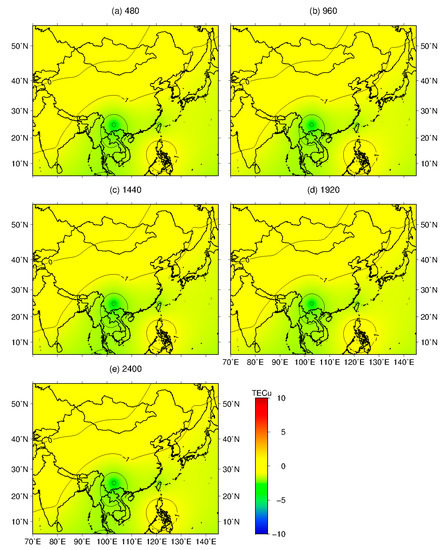
3.2. نتیجه مدل سازی در چین با در نظر گرفتن دوره های گمشده
4. نتیجه گیری
این مطالعه از دادههای مشاهداتی از DOY 095 تا 101 در سال 2011 استفاده کرد که توسط ایستگاههای IGS در داخل و اطراف منطقه چین برای به دست آوردن یک مدل بهبودیافته ارائه شد. در این رویکرد، BKM و DM برای محاسبه مقادیر TEC هر روز استفاده می شود. مقدار TEC شش روز قبل به عنوان داده ورودی در نظر گرفته می شود. مدل هموارسازی نمایی Holt-Winters برای پیشبینی سوگیری بین BKM و DM روز هفتم استفاده میشود. نتایج پیشبینی برای بهبود BKM استفاده میشود. علاوه بر این، برخی از دورهها ممکن است به دلیل موقعیتهای خاص، مانند تغییر ناگهانی محیط اطراف یا فعالیت خورشید، در عمل غایب باشند. بنابراین، برخی از دوره ها به طور تصادفی حذف می شوند. پس از مقایسه SKM بدون دوره از دست رفته با SKM با دوره از دست رفته با DM از طریق آزمایش ها و تجزیه و تحلیل نتایج، به نتایج زیر رسیدیم:
- (1)
-
SKM بدون دوره از دست رفته و SKM با یک دوره از دست رفته بهتر می تواند با روند DM مطابقت داشته باشد. SKM می تواند تغییرات زمانی یونوسفر را به خصوص در شب بهتر منعکس کند.
- (2)
-
نتایج تصحیح تاخیر یونوسفر با افزایش عرض جغرافیایی افزایش می یابد. تمام نتایج تصحیح تاخیر یونوسفر در مقایسه با نتایج BKM در طول روز بهبود یافته است. با این حال، در شب، نتایج اصلاح به طور قابل توجهی در مقایسه با نتایج BKM بهبود می یابد. این یافته نشان دهنده اعتبار این روش برای بهبود BKM است.
- (3)
-
روش منحنی spline مکعبی برای تعمیر دادههای دوره از دست رفته زمانی که دادههای مشاهده در برخی موقعیتها یک دوره از دست رفته دارند استفاده میشود. سپس، SKM بهبود می یابد. همچنین می تواند نتیجه قابل توجهی به همراه داشته باشد. نتایج تصحیح تأخیر یونوسفر تقریباً مشابه نتایج SKM است که هیچ دورهای از دست رفته نیست، تنها با یک تفاوت جزئی باقی مانده است. این تفاوت ممکن است تصادفی باشد.
منابع
- ژانگ، آر. آهنگ، WW; یائو، YB; شی، سی. لو، وای. یی، مدلسازی WT تاخیر یونوسفر منطقهای با مشاهدات زمینی BeiDou و GPS در چین. راه حل GPS. 2015 ، 19 ، 649-658. [ Google Scholar ] [ CrossRef ]
- ارچا، ا. هوانگ، WG; لیو، اس کیو. شی، ال کیو; گونگ، جی سی. چن، YH; Shen, H. یک تکنیک نقشه برداری TEC یونوسفر منطقه ای در چین و مناطق مجاور: پردازش داده های GNSS و تجزیه و تحلیل DINEOF. علمی چین اطلاع دهید. علمی 2015 ، 58 ، 1-11. [ Google Scholar ] [ CrossRef ]
- ژائو، QL; وانگ، جی ایکس؛ لیو، ZZ; هو، ZG; دای، ZQ; لیو، JN تجزیه و تحلیل اندازهگیریهای ماهوارهای BeiDou با چند مسیر کد و ترکیبهای بدون یونوسفر بدون هندسه. Sensors 2016 , 16 , 123. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هرناندز-پاجارس، م. Juan، JM; سانز، جی. آراگون-آنجل، آ. گارسیا ریگو، آ. سالازار، دی. Escudero, M. یونوسفر: اثرات، مدلسازی GPS و مزایای تکنیکهای ژئودتیک فضایی. جی. جئود. 2011 ، 85 ، 887-907. [ Google Scholar ] [ CrossRef ]
- Klobuchar، الگوریتم تاخیر زمانی یونوسفر JA برای کاربران GNSS تک فرکانس. IEEE Trans. هوانوردی الکتریک سیستم 1987 ، 23 ، 325-331. [ Google Scholar ] [ CrossRef ]
- کمیسیون اروپایی. GNSS اروپا (گالیله) سرویس باز-الگوریتم تصحیح یونوسفر برای کاربران تک فرکانس گالیله . شماره 1.2; کمیسیون اروپا: بروکسل، بلژیک، 2016. [ Google Scholar ]
- دفتر ناوبری ماهواره ای چین (CSNO). سیگنال سیستم ماهواره ای ناوبری BeiDou در سند کنترل رابط فضایی- سیگنال سرویس باز B1I (نسخه 2.0) ; CSNO: پکن، چین، 2012. [ Google Scholar ]
- اسکن، اس. یوسف، ر. Coster، A. ارزیابی عملکرد سیستم افزایش سطح وسیع برای رویدادهای طوفان یونوسفر. Positioning 2004 , 3 , 251-258. [ Google Scholar ] [ CrossRef ]
- Migoya-Orué، Y.; ناوا، بی. رادیسلا، اس. آلازو-کوارتاس، K. GNSS دریافت داده های TEC به IRI 2012. Adv. Space Res. 2015 ، 55 ، 29-41. [ Google Scholar ] [ CrossRef ]
- دانیل، RE; براون، LD; اندرسون، دی.ان. فاکس، مگاوات؛ Doherty، PH; دکر، DT; Sojka، JJ; Schunk، RW مدل یونوسفر پارامتریزه شده: یک پارامتر یونوسفر جهانی بر اساس مدل های اصول اولیه. علوم رادیویی 1995 ، 30 ، 1499-1510. [ Google Scholar ] [ CrossRef ]
- شیانگ، ی. یوان، YB؛ Li، ZS; Wang، NB تجزیه و تحلیل و اعتبار سنجی نقشه های مختلف جهانی یونوسفر (GIMs) در چین. Adv. Space Res. 2015 ، 55 ، 199-210. [ Google Scholar ] [ CrossRef ]
- آنگریسانو، آ. گاگلیون، اس. جویا، سی. ماسارو، ام. Troisi, S. مزایای نسخه NeQuick Galileo در موقعیت یابی تک نقطه ای GNSS. بین المللی جی. ناویگ. Obs. 2013 ، 2013 ، 302947. [ Google Scholar ] [ CrossRef ]
- وانگ، NB; یوان، YB؛ Li، ZS; Huo، XL تأثیر تصحیح یونوسفر در موقعیت یابی GNSS تک فرکانس. در کنفرانس ناوبری ماهواره ای چین (CSNC) 2013 مجموعه مقالات ; Springer: برلین/هایدلبرگ، آلمان، 2013; ص 471-486. [ Google Scholar ]
- Hoque, MM; Jakowski، N. یک مدل اصلاح یونوسفر جایگزین برای سیستم های ماهواره ای ناوبری جهانی. جی. جئود. 2014 ، 89 ، 391-406. [ Google Scholar ] [ CrossRef ]
- وانگ، NB; یوان، YB؛ Li، ZS; Huo، XL بهبود مدل Klobuchar برای اصلاحات تاخیر یونوسفر تک فرکانس GNSS. Adv. Space Res. 2016 ، 57 ، 1555-1569. [ Google Scholar ] [ CrossRef ]
- Li، ZS; یوان، YB؛ وانگ، NB; هرناندز-پاجارس، م. Huo, XL SHPTS: به سمت روشی جدید برای تولید نقشه TEC یونوسفر جهانی دقیق بر اساس توابع سری مثلثاتی کلی و هارمونیک کروی. جی. جئود. 2015 ، 89 ، 331-345. [ Google Scholar ] [ CrossRef ]
- هرناندز-پاجارس، م. Juan، JM; سانز، جی. اوروس، آر. گارسیا-ریگو، آ. فلتنز، ج. کومجاتی، ا. Schaer, SC; Krankowski، A. نقشه های IGS VTEC: منبع قابل اعتماد اطلاعات یونوسفر از سال 1998. J. Geod. 2009 ، 83 ، 263-275. [ Google Scholar ] [ CrossRef ]
- گولیاوا، TL; آریکان، ف. هرناندز-پاجارس، م. استانیسلاوسکا، I. سیستم ارزیابی و پیش بینی آب و هوای یونوسفر تطبیقی GIM-TEC. J. Atmos. سول ترس فیزیک 2013 ، 102 ، 329-340. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Macalalad، EP; تسای، ال سی؛ وو، جی. لیو، CH کاربرد مدل یونوسفر تایوان برای اصلاحات تاخیر یونوسفر تک فرکانس برای موقعیت یابی GPS. راه حل GPS. 2011 ، 17 ، 337-346. [ Google Scholar ] [ CrossRef ]
- کومجاتی، الف. نقشه برداری محتوای الکترونی کل یونوسفر جهانی با استفاده از سیستم موقعیت یابی جهانی . دانشگاه نیوبرانزویک: فردریکتون، NB، کانادا، 1997. [ Google Scholar ]
- لیو، ZZ; یانگ، Z. ناهنجاری در ضرایب یونوسفر پخش ثبت شده توسط گیرنده های GPS در دو چرخه خورشیدی گذشته (1992-2013). راه حل GPS. 2015 ، 20 ، 23-37. [ Google Scholar ] [ CrossRef ]
- داچ، آر. براکمن، ای. شایر، اس. بیتلر، جی. مایندل، ام. Prange، L. پردازش GNSS در CODE: گزارش وضعیت. جی. جئود. 2009 ، 83 ، 353-365. [ Google Scholar ] [ CrossRef ]
- یوان، YB؛ هوو، ایکس. او، JK; ژانگ، KF; چای، YJ; ون، دی بی. گرنفل، آر. پالایش ضرایب یونسفری کلوبوچار بر اساس مشاهدات GPS. IEEE Trans. هوانوردی الکتریک سیستم 2008 ، 44 ، 1498-1510. [ Google Scholar ] [ CrossRef ]
- Wu، XL; هو، XG; وانگ، جی. ژونگ، اچ جی. تانگ، CP ارزیابی مدل یونوسفر COMPASS در موقعیت یابی GNSS. Adv. Space Res. 2013 ، 51 ، 959-968. [ Google Scholar ] [ CrossRef ]
- رتیکا، تی. میشا، س. نیرمالا، اس. Rathnakara, SC; گانشان، AS تصحیح خطای یونوسفر تک فرکانس با استفاده از ضرایب تولید شده از داده های یونوسفر منطقه ای برای IRNSS. هندی J. رادیو فضایی فیزیک. 2013 ، 43 ، 125-130. [ Google Scholar ]
- فیلجار، ر. کوس، مدل محلی TKS Klobuchar مانند آب و هوای فضایی آرام، تأخیر یونوسفر GPS برای شمال آدریاتیک. جی. ناویگ. 2009 ، 62 ، 543-554. [ Google Scholar ] [ CrossRef ]
- هان، ال. ژانگ، اچ پی؛ هوانگ، YD; وانگ، من؛ زو، وای؛ Ping، JS بهبود مدل تاخیر یونسفری نوع Klobuchar با استفاده از GPS TEC دو بعدی در چین. در مجموعه مقالات سی و ششمین مجمع علمی COSPAR، پکن، چین، 16 تا 23 ژوئیه 2006.
- گائو، ی. Liu، ZZ مدلسازی یونوسفر دقیق با استفاده از دادههای شبکه GPS منطقهای. موقعیت یابی 2010 ، 1 ، 18-24. [ Google Scholar ] [ CrossRef ]
- هانسن، ا. بلانچ، جی. والتر، T. تجزیه و تحلیل تصحیح یونوسفر برای WAAS آرام و طوفانی. در مجموعه مقالات سیزدهمین نشست فنی بین المللی بخش ماهواره ای موسسه ناوبری (ION GPS 2000)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 19 تا 22 سپتامبر 2000.
- Hatch, R. Synergism کد GPS و اندازه گیری حامل. در مجموعه مقالات سومین سمپوزیوم بین المللی ژئودتیک در مورد موقعیت یابی داپلر ماهواره ای، دانشگاه ایالتی نیومکزیکو، لاس کروسس، NM، ایالات متحده آمریکا، 8-12 فوریه 1982.
- هاچ، R. دیفرانسیل دینامیک GPS در سطح سانتی متر. در مجموعه مقالات چهارمین سمپوزیوم بین المللی ژئودتیک در موقعیت یابی ماهواره، آستین، تگزاس، ایالات متحده آمریکا، 28 آوریل تا 2 می 1986.
- لاشاپل، جی. هاگگلند، جی. آزمایش های موقعیت یابی سینماتیک زمینی فالکنبرگ، W. GPS. در مجموعه مقالات چهارمین سمپوزیوم بین المللی ژئودتیک در موقعیت یابی ماهواره، آستین، تگزاس، ایالات متحده آمریکا، 28 آوریل تا 2 می 1986.
- لیو، ZZ; گائو، Y. توموگرافی یونوسفر با استفاده از اندازهگیریهای GPS. در مجموعه مقالات سمپوزیوم بین المللی در مورد سیستم های سینماتیک در ژئودزی، ژئوماتیک و ناوبری، Banff، AB، کانادا، 5-8 ژوئن 2001.
- ساردون، ای. ریوس، ا. Zarraoa، N. برآورد بایاس های دیفرانسیل فرستنده و گیرنده و کل الکترون یونوسفر از مشاهدات سیستم موقعیت یابی جهانی. علوم رادیویی 1994 ، 29 ، 577-586. [ Google Scholar ] [ CrossRef ]
- کومجاتی، ا. لانگلی، RB اثر ارتفاع پوسته بر مدلسازی یونوسفر با دقت بالا با استفاده از GPS. در مجموعه مقالات کارگاه IGS 1996، سیلور اسپرینگ، MD، ایالات متحده آمریکا، 19 تا 21 مارس 1996.
- کومجاتی، ا. ویلسون، BD; Runge، TF یک مدل یونوسفر جدید برای GPS دیفرانسیل منطقه وسیع: رویکرد چند پوسته. در مجموعه مقالات نشست فنی ملی موسسه ناوبری، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 28 تا 30 ژانویه 2002.
- مانوچی، ای جی؛ ویلسون، BD; یوان، DN; هو، CH; Lindqwister، UJ; Runge، TF یک تکنیک نقشه برداری جهانی برای اندازه گیری محتوای الکترون کل یونوسفر مشتق از GPS. علوم رادیویی 1998 ، 33 ، 565-582. [ Google Scholar ] [ CrossRef ]
- Acob، NY; عبدالله، م. اسماعیل، م. تعیین محتوای کل الکترون GPS با استفاده از تابع نگاشت یونوسفر مدل تک لایه (SLM). بین المللی جی. کامپیوتر. علمی شبکه امن 2008 ، 8 ، 154-169. [ Google Scholar ]
- Holt، CC پیشبینی فصلی و روندها با میانگینهای متحرک وزندار نمایی. بین المللی J. پیش بینی. 2004 ، 20 ، 5-10. [ Google Scholar ] [ CrossRef ]
- ورومان، پ. شادی، م. Rabenasolo، B. انطباق فازی مدل Holt-Winter برای پیش بینی فروش نساجی. J. متن. Inst. 1998 ، 89 ، 78-89. [ Google Scholar ] [ CrossRef ]
- کامران راد، ر. امیری، الف. نمودار کنترلی مبتنی بر هولت-زمستان قوی برای نظارت بر پروفایل های خطی ساده همبسته خودکار با داده های آلوده. علمی ایران. 2016 ، 23 ، 1345–1354. [ Google Scholar ]
- کاظم پور، MK Stationary Forecasting; استفاده از Holt-Winter و اصلاح Holt-Winter. بیوم. J. 2007 , 32 , 347-356. [ Google Scholar ] [ CrossRef ]
- اسمیت، WHF; Wessel, P. Gridding با خطوط انحنای پیوسته در کشش. ژئوفیزیک 2012 ، 55 ، 293-305. [ Google Scholar ] [ CrossRef ]
- رابینسون، نماینده مجلس؛ Fairweather، G. راه حل همآهنگی متعامد مکعبی برای مشکلات انتشار موج صوتی زیر آب. جی. کامپیوتر. آکوست. 2012 ، 1 ، 355-370. [ Google Scholar ] [ CrossRef ]
- پل، KS; داس، ا. ری، اس. Paul, A. ویژگی های محتوای الکترون کل (TEC) مشاهده شده از زنجیره ای از ایستگاه ها در نزدیکی تاج شمالی ناهنجاری یونیزاسیون استوایی (EIA) در امتداد نصف النهار 88.5 درجه شرقی در هند. J. Atmos. سول ترس فیزیک 2015 ، 137 ، 17-28. [ Google Scholar ] [ CrossRef ]


© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر