


خلاصه
پردازش موازی در تجسم بلادرنگ سیستمهای اطلاعات جغرافیایی سهبعدی (3DGIS) در سالهای اخیر تمایل به تمرکز بر سطوح الگوریتم داشته است و بیشتر روشهای موجود از رشتههای متعدد در یک واحد پردازش مرکزی (CPU) یا هسته در یک هسته استفاده میکنند. واحد پردازش گرافیکی (GPU) برای بهبود کارایی در محاسبه سطح جزئیات (LOD) برای مدلهای سهبعدی (3D) و نمایش مدلهای ارتفاعی دیجیتال (DEMs) و نقشههای Orthphoto دیجیتال (DOM). تجزیه و تحلیل سیستماتیک وظایف و ویژگی های داده موازی سازی در تجسم بلادرنگ 3DGIS همچنان از توسعه سخت افزار عقب مانده است. در این مقاله، ابتدا رویههای اصلی تجسم بیدرنگ 3DGIS شهری بررسی شده و سپس خط لوله تجسم بیدرنگ تحلیل میشود. علاوه بر این، خط لوله بر اساس ترتیب کار و وابستگی ورودی-خروجی به مراحل مختلف وظیفه تجزیه می شود. بر اساس تجزیه و تحلیل موازی کاری در مراحل مختلف خط لوله، ویژگی های موازی داده ها در هر کار با مطالعه الگوریتم های درگیر خلاصه می شود. در نهایت، این مقاله یک حالت پردازش مشترک موازی و یک استراتژی مشترک برای تجسم زمان واقعی 3DGIS شهری پیشنهاد میکند. همچنین پایه ای اساسی برای توسعه الگوریتم ها و استراتژی های موازی در 3DGIS فراهم می کند. این مقاله یک حالت پردازش مشترک موازی و یک استراتژی مشترک برای تجسم زمان واقعی 3DGIS شهری پیشنهاد میکند. همچنین پایه ای اساسی برای توسعه الگوریتم ها و استراتژی های موازی در 3DGIS فراهم می کند. این مقاله یک حالت پردازش مشترک موازی و یک استراتژی مشترک برای تجسم زمان واقعی 3DGIS شهری پیشنهاد میکند. همچنین پایه ای اساسی برای توسعه الگوریتم ها و استراتژی های موازی در 3DGIS فراهم می کند.
کلید واژه ها:
موازی کاری ; موازی سازی داده ها ; تجسم در زمان واقعی ؛ GIS سه بعدی ؛ خط لوله تجسم
1. معرفی
تجسم واقع گرایانه نه تنها یکی از فن آوری های کلیدی سیستم های اطلاعات جغرافیایی (GIS)، بلکه یکی از عناصر اساسی برای خدمات عمومی جغرافیایی است [ 1 ]. به عنوان یکی از عملکردهای اساسی در GIS، توانایی تجسم اطلاعات مکانی سه بعدی به شیوه ای کارآمد، واقعی و واقعی به یک شاخص مهم برای عملکرد سیستم ها تبدیل شده است [2] .]. پیشرفت فناوریهای مدلسازی و بهبود اندازهگیری دقت، درک و استفاده از اطلاعات جغرافیایی را از بردار یا شطرنجی سنتی عصر دوبعدی به عصر سه بعدی جدید تبدیل کرده است که در آن اشیاء را میتوان با یک مدل هندسی دقیق نشان داد. بافت های با کیفیت بالا و حالت مکانی-زمانی با ویژگی های پویا. حجم دادههای مکانی رشد تصاعدی را تجربه کرده است و دادههایی که باید ارائه شوند بسیار فراتر از تواناییهای پردازش رایانههای شخصی فعلی (PC) هستند [ 3]]. استفاده کامل از ویژگیهای معماری چند CPU (واحد پردازش مرکزی) و چند GPU (واحد پردازش گرافیکی) برای سرعت بخشیدن به پردازش دادهها و تجسم دادههای مکانی در مقیاس بزرگ به یک موضوع تحقیقاتی داغ تبدیل شده است. چالش بزرگ در زمینه علم اطلاعات جغرافیایی و علوم گرافیک کامپیوتری.
تجسم بلادرنگ به طور کلی به عنوان یک روش چرخه ای توصیف می شود که می تواند به سه مرحله تقسیم شود: مرحله کاربرد، مرحله پردازش هندسه، و مرحله پردازش قطعه [ 4] .]. از دهه 1990، تجزیه و تحلیل و تحقق پردازش موازی برای تجسم بلادرنگ به دو دسته تقسیم شده است. نوع اول مبتنی بر فرآیند است که در سال های اولیه عصر رایانه شخصی ظاهر شد، زمانی که توانایی های پردازشی CPU ها به اندازه کافی قدرتمند نبود. روند مرحله تجسم را می توان به چهار کار تقسیم کرد: وظیفه محاسبه دید، وظیفه رندر، وظیفه بارگذاری داده، و وظیفه انتخاب LOD (سطح جزئیات). هر کار در یک CPU جداگانه انجام می شود و به عنوان یک فرآیند اجرا می شود. این نوع روش پردازش کاربردهای گسترده ای دارد. سیستم راهنمای UC Berkeley [ 5 ] از چهار CPU برای انجام وظایف استفاده می کند. هر CPU سیستم یک فرآیند را اجرا می کند و هر فرآیند CPU یک وظیفه را انجام می دهد. سیستم رندر مدل عظیم (MMR) [ 6] فرآیند تجسم را به هشت کار تجزیه می کند، یعنی حذف، انتخاب LOD، حذف frustum، حذف انسداد، رندر انسداد، رندر بافتی با عمق مش (TMD)، رندر هندسه، و پیش واکشی ناهمزمان. این وظایف در چهار CPU انجام می شود. هر CPU دو فرآیند را اجرا می کند و هر فرآیند با یک وظیفه متصل می شود. نوع دوم پردازش موازی مبتنی بر thread است که در زمان های توسعه سریع CPU با روند هایپر رشته و چند هسته ای ظاهر می شود. این نوع روش پردازش همان استراتژی روش قبلی را اتخاذ می کند. هر دوی آنها روند تجسم را به چندین کار تقسیم می کنند. با این حال، روش مبتنی بر نخ هر کار را در یک رشته انجام می دهد. سیستم iWalk [ 7] روند تجسم را به پنج کار تقسیم می کند که عبارتند از: محاسبه تقریبی برای دید، محاسبه حفاظت برای مشاهده، رندر، پیش واکشی پیش بینی، و بارگذاری دیسک های فرم، و هر وظیفه به یک رشته مستقل متصل می شود. سیستم Quick-VDR [ 8 ] فرآیند رندر را به چهار وظیفه، یعنی انتخاب LOD، حذف انسداد، رندر و واکشی داده ها تقسیم می کند. ویژگی این سیستم که با سایرین متفاوت است این است که هر کار ممکن است در بیش از یک رشته انجام شود. به عنوان مثال، وظیفه واکشی داده در دو رشته برای بارگیری داده ها از حافظه خارجی اجرا می شود. سیستم ژئومورفینگ سطوح جزئیات (GoLD) [ 9] روند تجسم را به پنج کار تقسیم می کند، از جمله انتخاب LOD، حذف انسداد، رندر، بارگذاری داده های هندسی و بارگذاری داده های بافت. این سیستم برای انجام پنج وظیفه فوق تنها دو رشته میگیرد، یک رشته برای وظیفه بارگذاری داده و رشته دیگر برای همه وظایف دیگر. سیستم ANYGL [ 10 ] استراتژی متفاوتی را اتخاذ میکند که در آن شش کار، یعنی محاسبه دید، انتخاب LOD، رندر کردن، نقشهبرداری دیسک برای بارگذاری داده، واکشی پیشازی دادهها به صورت ناهمزمان، و جایگزینی نگاشت دیسک، به سه نوع و هر نوع فهرستبندی میشوند. می تواند توسط چندین رشته انجام شود.
در زمینه علم اطلاعات جغرافیایی، مطالعات زیادی برای بررسی رندرینگ با کارایی بالا در 3DGIS (سیستم های اطلاعات جغرافیایی سه بعدی) انجام شده است. ژنگ [ 11 ] یک الگوریتم ذخیره سازی دینامیکی موازی و رندر مبتنی بر تبدیل موجک عدد صحیح و ترکیب درخت چهارگانه محدود در یک GPU برای کاهش اثرات به روز رسانی داده ها و ذخیره داده ها به تغییر شکل زمین در زمان واقعی برای سرعت رندر دینامیکی پیشنهاد کرد. روش مدلسازی سطح با دقت بالا، که با GPU شتابدهی میشود، همچنین میتواند برای ایجاد یک مدل ارتفاع دیجیتال (DEM) با دقت بالا استفاده شود [ 12 ]. با توجه به ویژگی های مختلف الگوریتم های موازی، Song [ 13] اشاره کرد که مکانیسم تقسیم داده ها به موضوع کلیدی در میان مشکلات تحقیقاتی تبدیل شده است. انواع دیگر روش ها، مانند Map Reduce [ 14 ]، ناحیه شبکه را به سلول های شطرنجی تقسیم می کنند و هر داده شطرنجی را به واحدهای محاسباتی مختلف اختصاص می دهند تا به محاسبات موازی برای پردازش زمین دست یابند. برای دستیابی به رندر کارآمد مدلهای سهبعدی، Xu [ 15 ] یک استراتژی بارگذاری سریع داده را پیشنهاد کرد، که خواننده جریان پیوند داده را از طریق یک الگوریتم پردازش موازی چند رشتهای ترکیب میکرد و متضمن یک روش جدید سازماندهی مجدد دادهها با تبدیل شهر CityGML بود. به یک شی گرید Direct3D مدل کنید. برای پردازش موثر تصاویر سنجش از راه دور، یک حالت پردازش مشترک CPU و GPU از طریق orthorectify انجام می شود. زی [ 16] از ویژگی های طبیعی الگوهای موازی در تصاویر سنجش از راه دور بهره کامل برد و Guo [ 17 ] استفاده از GPU را برای تطبیق تصویر بررسی کرد. با هدف وظایف خاص، الگوریتمهای بهینهسازی با استفاده از یک مدل مشترک CPU و GPU برای پردازش موازی به کار گرفته میشوند. روشهای سنتی تجسم در 3DGIS عمدتاً بر موضوعات نمادسازی، مقیاس و بازنمایی در سه بعد متمرکز هستند. در عصر دادههای بزرگ، با توجه به حجم عظیم، تغییرات پویا و عدم قطعیت دادهها، توسعه روشهای نمایشی تعاملی و پویا جدید برای کشف اکتشافات و توسعه یک روش تجزیه و تحلیل بصری همراه با محاسبات جغرافیایی، از جمله آمار و یا. داده کاوی. این روش ها به ویژگی های مهم داده های بزرگ GIS تبدیل شده اند.18 ].
به طور خلاصه، هیچ تحلیل سیستماتیکی برای تجسم بلادرنگ 3DGIS شهری در زمینههای گرافیک کامپیوتری یا علم اطلاعات جغرافیایی وجود ندارد. تجسم در زمان واقعی برای اهداف مشاهده پویا و داده های حسگر به یک موضوع فوری تبدیل شده است، به خصوص از زمانی که GIS بلادرنگ پیشنهاد شده است [ 19 ]. ما باید روشی را برای پردازش بیدرنگ دادههای بزرگ از یک مدل نظری به یک ابزار واقعی بررسی کنیم.
این مقاله ابتدا روش اصلی تجسم بیدرنگ 3DGIS شهری را خلاصه می کند و سپس خطوط لوله فرآیند رندر زمان واقعی تجسم را تجزیه و تحلیل می کند. علاوه بر این، تجزیه خط لوله با وظایف با ترتیب وظایف در خط لوله و وابستگی ورودی-خروجی داده بین وظایف مجاور انجام می شود. پس از آن، ویژگیهای دادهای الگوریتمهای پایه درون وظایف ارزیابی میشوند. بر این اساس، این مقاله یک حالت همپردازش موازی و یک استراتژی مشترک برای تجسم بیدرنگ 3DGIS شهری را پیشنهاد میکند. به نظر می رسد این روش شواهد موثری برای توسعه برنامه های کاربردی رندر سیستم های 3DGIS ارائه می دهد.
2. تحلیل رویه روی تجسم بیدرنگ 3DGIS شهری
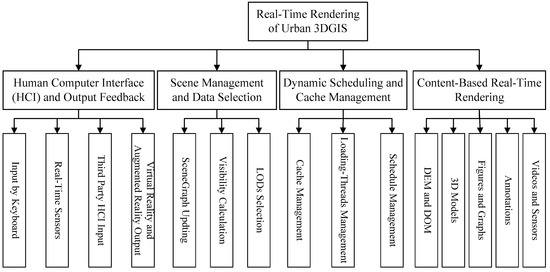
به عنوان یکی از روش های تجسم مدل های سه بعدی شهر، روش تجسم مبتنی بر برداری از یک برداری برای نمایش مدل های سه بعدی استفاده می کند. پس از تنظیم نقطه دید و جهتهای دید، پردازشهای قابلتوجهی مانند سایهزنی، انسداد، نورپردازی، نقشهبرداری بافت، طرح ریزی و در نهایت یک عکس برای انعکاس صحنه مجازی تولید میشود [20 ] . وظایف و عملکردهای مرتبط با تجسم مدل های سه بعدی شهر را می توان به صورت مرور چند نمای، بزرگنمایی و بزرگنمایی، عبور از میان، چرخش و پرواز توسط هر مسیریاب و راننده روی زمین خلاصه کرد [21 ]]. با توسعه GIS بلادرنگ، نیاز به توانایی تجسم به سرعت افزایش یافته است، که میتواند دادههای مختلف بهدستآمده از حسگرهای فضا، هواپیما و تجهیزات زمینی را پردازش کند یا توسط تکنیکهای رابط جدید، مانند دستگاههای تعاملی حسی جسمی، یا واقعیت مجازی و دستگاه های حسگر واقعیت افزوده تجسم بلادرنگ 3DGIS شهری باید بتواند داده های در حال رشد را با حافظه محدود پردازش کند، نمودار صحنه را مدیریت کند و داده های مقیاس بزرگ را به صورت پویا و موثر برنامه ریزی کند. رویه ها از ورودی داده، مدیریت صحنه، و برنامه ریزی پویا تا رندر زمان واقعی را شامل می شود. روش اصلی تجسم 3DGIS شهری در شکل 1 نشان داده شده است .
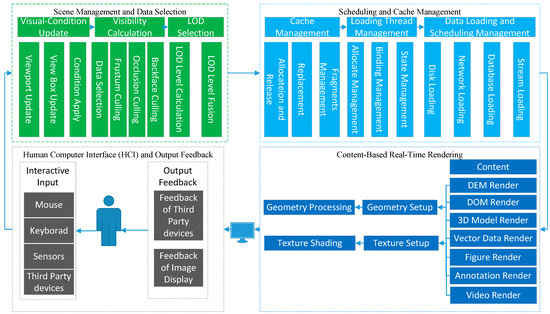
مشابه روشهای علوم کامپیوتر، روش تجسم ذکر شده در این مقاله، تجسم بیدرنگ 3DGIS شهری را به عنوان خط لوله میگیرد و سپس خط لوله را بر اساس ترتیب کار و وابستگی ورودی-خروجی دادهها به چهار مرحله تقسیم میکند. آنها مرحله رابط انسانی و بازخورد خروجی، مرحله مدیریت صحنه و انتخاب داده، مرحله زمان بندی و مدیریت حافظه پنهان، و مرحله رندر زمان واقعی مبتنی بر محتوا هستند. هر مرحله را می توان بیشتر به چندین کار تقسیم کرد. در مرحله رابط انسان و بازخورد خروجی، سیستم 3DGIS شهری میتواند دادههای ورودی را از دستگاههای معمولی مانند ماوس و صفحه کلید پردازش کند. علاوه بر این، با توسعه سریع واقعیت مجازی و واقعیت افزوده، این سیستم باید توانایی آدرس دهی انواع سیگنال های دریافت شده از حسگرهای ورودی بلادرنگ، سیستم های متصل، و دستگاه های ورودی تعاملی هولوگرافیک و عینک های مجازی، مانند Kinect، Google Glass+، Oculus و HoloLens را داشته باشد. سیگنال های ورودی به محض انتقال به سیستم به دستورات تبدیل می شوند و سپس این دستورات به پارامترهای مورد استفاده برای تجسم محاسبه می شوند. در مرحله مدیریت صحنه و انتخاب داده ها، ابتدا گره های نمودار صحنه با تغییر داده ها به روز می شوند و سپس گره های قابل مشاهده با توجه به شرایط بصری محاسبه می شوند. در پایان مرحله، یک لیست گره برای بارگذاری داده ها و لیستی از اشیا نیز برای رندر تولید می شود. یک کار مهم دیگر در این مرحله این است که LOD های مناسب داده ها باید بر اساس تعادل بین کیفیت رندر و هزینه رندر انتخاب شوند. در مرحله زمانبندی و مدیریت حافظه نهان، یک روش مدیریت بافر کارآمد برای حجم حافظه محدود پیادهسازی میشود. رشته هایی را برای بارگذاری دینامیک داده ها و تخلیه داده های غیر ضروری برای حفظ اندازه مناسب اختصاص می دهد. در مرحله رندر بیدرنگ مبتنی بر محتوا، داده ها برای رندر به حافظه پنهان منتقل می شوند. محتویات داده شامل DEM، DOM، مدلهای سه بعدی، دادههای بردار، شکلها، نمادها، حاشیهنویسیها و دادههای ورودی بلادرنگ مبتنی بر جریان است. وظایف فرعی در این مرحله شامل تقسیم داده های محتوا، تنظیم گرافیک های ابتدایی، ایجاد اشیاء بافت، تبدیل داده ها به GPU،
3. خط لوله تجسم در زمان واقعی 3DGIS شهری
تجسم 3DGIS شهری فرآیندی است که ارزش دیجیتال را در مقیاس شناختی ترسیم می کند و اطلاعات را به صورت بصری منتقل می کند و همچنین یک فرآیند محاسبه از توصیف یک صحنه تا تولید تصویر است [22 ] . در این مقاله، ما روند جزئیات رندر خط لوله 3DGIS شهری را همانطور که در شکل 2 نشان داده شده است، شرح می دهیم.. ابتدا، سیستم سیگنال های دستگاه های ورودی مانند ماوس، صفحه کلید، حسگرها و سایر دستگاه های شخص ثالث را می گیرد. سیگنال ها ممکن است یک نقطه دید متحرک، یک جعبه پرس و جو، یک حرکت و/یا یک فرمان صوتی باشند. سپس تمام این سیگنال ها به یک جعبه بصری تبدیل می شوند که مهمترین پارامتر مورد استفاده برای محاسبه اشیاء بصری و LOD های مناسب است. بر اساس فهرست اشیاء بصری محاسبهشده و LODها، محتوای دادههای فهرستهای شی که در حافظه خارجی قرار دارند، توسط چند رشته در حافظه اصلی بارگذاری میشوند. پس از آن، داده های بارگذاری شده توسط رابط های برنامه نویسی برنامه های گرافیکی (API) مانند OpenGL یا DirectX، با مراحل رندر تنظیمات محیط، راه اندازی اولیه و تنظیم وضعیت پردازش می شوند. در نهایت، داده های اولیه، دستورات ترسیم، و دستورات کنترل رندر به حافظه نهان گرافیکی مانند فریم بافر منتقل می شود و در نهایت یک تصویر تولید می شود. پس از مشاهده تصویر توسط کاربر و سپس دریافت بازخورد، شرایط بصری تغییر می کند و فرآیند با اولین مرحله که به صورت حلقه اجرا می شود آغاز می شود. به این ترتیب، روش تجسم بلادرنگ 3DGIS شهری بر روی الگوی یک خط لوله کار می کند. روش خط لوله ناهمزمان می تواند نوسانات نرخ فریم ناشی از انتظار و تأخیر در طول مراحل سریال های همزمان را برطرف کند و تجسم بیدرنگ و روان را درک کند. به این ترتیب، روش تجسم بلادرنگ 3DGIS شهری بر روی الگوی یک خط لوله کار می کند. روش خط لوله ناهمزمان می تواند نوسانات نرخ فریم ناشی از انتظار و تأخیر در طول مراحل سریال های همزمان را برطرف کند و تجسم بیدرنگ و روان را درک کند. به این ترتیب، روش تجسم بلادرنگ 3DGIS شهری بر روی الگوی یک خط لوله کار می کند. روش خط لوله ناهمزمان می تواند نوسانات نرخ فریم ناشی از انتظار و تأخیر در طول مراحل سریال های همزمان را برطرف کند و تجسم بیدرنگ و روان را درک کند.
3.1. ویژگی های وظیفه خط لوله
خط لوله رندر بلادرنگ در گرافیک کامپیوتری را می توان به مرحله کاربرد، مرحله فرآیند هندسی و مرحله فرآیند پیکسل تقسیم کرد [ 23 ، 24 ]. این روش بر روی وظایف پردازش شده در سخت افزار گرافیک تمرکز می کند. در این مقاله، خط لوله برای 3DGIS شهری به مرحله تعامل انسان و کامپیوتر و بازخورد خروجی، مرحله مدیریت صحنه و مرحله انتخاب داده، مرحله زمانبندی و مدیریت حافظه پنهان، و مرحله رندر زمان واقعی مبتنی بر محتوا تقسیم میشود. سه بخش اول مربوط به مرحله کاربرد تعریف شده در گرافیک کامپیوتری است. بخش چهارم مرحله رندر زمان واقعی مبتنی بر محتوا را می توان به مراحل پردازش هندسه و پردازش بافت تقسیم کرد.
وظیفه مرحله تعامل انسان و کامپیوتر و بازخورد خروجی، نظارت بر انواع دستگاه های ورودی و دریافت دستورالعمل ورودی و جریان داده است. محتویات ورودی شامل سیگنال های ورودی ماوس، سیگنال های ورودی صفحه کلید، داده های حسگر و سایر سیگنال های ورودی از دستگاه های شخص ثالث است. خروجی مرحله زیر در خط لوله را می توان به عنوان یک خروجی بصری و خروجی بازخورد در نظر گرفت که تصاویر و سیگنال های استاندارد دستگاه های حسگر هستند.
مدیریت صحنه و مرحله انتخاب داده را می توان به سه وظیفه تقسیم کرد: خدمات به روز رسانی برای شرایط بصری، محاسبه دید، و انتخاب LOD. سرویسهای بهروزرسانی برای شرایط بصری را میتوان به این صورت تعریف کرد که وقتی سیستم پارامترهای ورودی را دریافت میکند، آنها را به موقعیت دیدگاه تبدیل میکند و آنها را به یک جعبه حجم نمایش منتقل میکند. وظایف محاسبه دید شامل پیمایش نمودار صحنه و محاسبه تقاطع هر گره با جعبه حجم نمایش با انجام الگوریتم دید frustum، محاسبه حذف انسداد و محاسبه دید برگشتی است. لیست گره های صحنه قابل مشاهده خروجی مرحله بعدی است. انتخاب LOD مستلزم محاسبه فاصله بین هر گره و نقطه دید با استفاده از لیست گره های صحنه قابل مشاهده است. با توجه به تحمل خطای صفحه نمایش پروجکشن صفحه نمایش و فاصله، سطح LOD مناسب برای هر گره را می توان بر اساس ذخیره محتوای داده گره تعیین کرد. بنابراین ورودی این مرحله پارامتر دیدگاه تعامل انسان و رایانه است و خروجی مرحله بعد یک لیست شی با LOD مناسب آن است.
مرحله زمانبندی و مدیریت حافظه پنهان را میتوان به سه وظیفه تقسیم کرد: مدیریت کش، مدیریت چند رشتهای و مدیریت زمانبندی پویا برای بارگیری و تخلیه دادهها. مدیریت کش نیاز به پیاده سازی الگوریتم های تخصیص و تخصیص برای بلوک های حافظه و سیاست جایگزینی دارد تا از کارایی بالا بدون تکرار بارگذاری از دستگاه های ذخیره سازی خارجی کند اطمینان حاصل کند. مدیریت چند رشته ای یک Thread Pool را برای مدیریت دسته های نخ ایجاد می کند. برای دادههایی که باید بارگذاری شوند، رشتهها از استخر اعمال میشوند و سپس به کارهای بارگیری خاصی متصل میشوند. وضعیت نخ در حین کار کنترل می شود و پس از اتمام کار نخ به استخر برگردانده می شود. مدیریت بارگیری و تخلیه داده ها مشخص می کند که داده ها در کجا ذخیره می شوند. مکان ذخیره سازی روش مورد استفاده برای بارگیری داده ها را با خواندن فایل داده دیسک محلی، با انتقال داده های شبکه، بارگیری داده های پایگاه داده یا با پخش جریانی تعیین می کند. خروجی این مرحله لیستی از گره های گراف صحنه به همراه فهرست داده است.
مرحله رندر زمان واقعی مبتنی بر محتوا، محتوای داده ها را تجزیه می کند. نوع داده موجود را می توان به عنوان DEM، DOM، مدل سه بعدی، بردار دوبعدی، ویژگی های نمودار، تگ های حاشیه نویسی و داده های ویدئویی طبقه بندی کرد. تمام داده ها تجزیه و تحلیل می شوند و سپس به عنوان یک هندسه با واحدهای بافت متناظر یا جریان داده بیان می شوند. پس از آن، تمام دادهها با استفاده از APIهای ترسیمی (مانند OpenGL یا DirectX) برای واحدهای اولیه و بافت تنظیم میشوند. APIهای گرافیکی سعی می کنند تمام دستورات و عناصر طراحی را بسته بندی کنند تا لیست های نمایشی یا سفارش های ترسیم با سرعت بالا را ایجاد کنند که به موتور گرافیکی ارسال می شود. در نهایت، یک تصویر حاصل به عنوان خروجی به بافر فریم تولید می شود و توسط دستگاه های نمایشگر خروجی می شود. داده های ورودی این مرحله عبارتند از لیست شی و لیست داده با محتوای آن،
3.2. ویژگی های داده در Task
الگوهای موازی تجسم بلادرنگ 3DGIS شهری ویژگیهای الگوی موازی وظایف در خط لوله و الگوی موازی دادهها الگوریتمها در وظایف را نشان میدهد. بنابراین، لازم است ویژگی های داده ها در هر کار از مراحل در خط لوله بررسی شود. بر اساس توضیحات واضح در مورد رابطه وابستگی ورودی-خروجی داده بین وظایف، میتوانیم حالت موازی دادههای چندگانه تک دستورالعمل (حالت SIMD) را برای بهبود توانایی رندر زمان واقعی 3DGIS شهری بسازیم.
3.2.1. تعامل انسان و رایانه و مرحله بازخورد خروجی
دادههای ورودی این مرحله را میتوان به صورت دستورالعملها در طول رندر زمان واقعی 3DGIS و بازخورد سنسورهای ورودی در طول فرآیند تجسم در هر تصویر فریم بیان کرد. پس از مشاهده تصویر رندر توسط کاربر و تصمیم گیری درباره بازخورد جدید از طریق دستگاه های ورودی یا حسگرها، دستورالعمل های جدید تولید می شود و سپس به پارامترهای جدید تبدیل می شود که داده های ورودی برای مرحله بعدی هستند.
3.2.2. مدیریت صحنه و مرحله انتخاب داده ها
دستورالعمل سنسورها در مرحله قبل را می توان به اطلاعات بصری تبدیل کرد. علاوه بر این، کدهای حسگرها و اطلاعات بصری به عنوان موقعیت نقطه دید یا سایر پارامترها محاسبه می شوند. علاوه بر این، نمودار صحنه منطقه مورد مطالعه را می توان به عنوان داده ورودی استفاده کرد و شرایط بصری نقطه دید را می توان به محدوده دید منتقل کرد که به عنوان یک جعبه دید نمایش داده می شود. سپس، وظیفه محاسبه دید، از کادر محدود کننده صحنه به عنوان پارامتر برای انجام حذف frustum، حذف پشت صورت، و محاسبه حذف انسداد استفاده می کند. ویژگی های داده این الگوریتم ها را می توان به صورت چهره های view frustum، جعبه مرزی گره ها، اشیاء و چند ضلعی اشیاء، که با روش نمایش b-rep سازماندهی شده اند، نشان داد. در انتخاب LOD، دیدگاه و موقعیت گرههای گراف صحنه برای محاسبه فاصله یا پارامتر خطای پیشبینی استفاده میشود که برای انتخاب LOD گسسته یا محاسبه LOD پیوسته برای گرههای گراف صحنه متصل استفاده میشود. خروجی این مرحله لیست قابل مشاهده گره ها و پارامترهای LOD گره های گراف صحنه است.
3.2.3. مرحله زمان بندی و مدیریت حافظه پنهان
پس از محاسبه دید و انتخاب داده ها، لیست گره های نمودار صحنه قابل مشاهده و LOD های هر گره پارامترهای ورودی برای این مرحله هستند. داده های ورودی وابسته این مرحله نیز شامل داده های هندسه و بافت واقع در حافظه خارجی کند و داده های حسگر از یک مرکز داده یا شبکه است. ساختار سازمانی دادهها در حافظه خارجی باید با سازماندهی دادههای نمودار صحنه سازگار باشد، به این معنی که میتوان محل ذخیره دادههای حافظه خارجی شی را از طریق گرههای نمودار صحنه پیدا کرد. ذخیره سازی و سازماندهی داده ها در حافظه خارجی همیشه در طول فرآیند آفلاین ایجاد می شود. عملکردهای مدیریت بافر باعث تخصیص و مدیریت حافظه در بلوک های داده می شود. مشخصه های داده ای که در تخصیص حافظه نشان داده می شوند یک بلوک داده هستند.
3.2.4. مرحله رندر زمان واقعی مبتنی بر محتوا
این مرحله به فهرستهای بارگذاری دادهها در حافظه پنهان، از جمله دادههای هندسی، دادههای بافت و دادههای جریانی حسگرها متکی است. با در نظر گرفتن روش پیاده سازی رایج، داده های ذخیره شده تنها به داده هایی اشاره می کنند که در کش فریم بارگذاری شده اند. آنها همچنین می توانند داده های رندر کش فریم فعلی نامیده شوند. وظیفه پردازش هندسه ابتدا داده های بلوک شی را به داده های راس و چند ضلعی تجزیه می کند و سپس تبدیل نمای مدل، محاسبات نورپردازی، محاسبات طرح ریزی، و عملیات برش را اعمال می کند. برای داده های بافت، مقادیر مختصات بافت بر اساس راس و مختصات بافت اصلی درون یابی می شوند. در نهایت، مختصات باید بیشتر به فضای بافت تبدیل شوند، که می تواند مختصات را برای ترسیم یک تصویر برای تکمیل کار پردازش هندسه ترسیم کند. داده های ورودی وظیفه پردازش پیکسلی شامل شی رأس و شی بافت است. شی راس مقدار رنگی تولید شده در مرحله پردازش راس است و شی بافت از طریق پردازش فرمان و تنظیم قالب بافت توسط رابط گرافیکی API مانند OpenGL تولید می شود. هر دو شی فوق را می توان برای تولید قطعه بعد از مرحله شطرنجی استفاده کرد و قطعه را می توان بعد از عملیات مربوطه به عنوان پیکسل فراخوانی کرد. خروجی نهایی این مرحله یک تصویر تولید شده است که برای نمایش در بافر فریم قرار می گیرد. و شی بافت از طریق پردازش فرمان و تنظیم قالب بافت توسط رابط گرافیکی API مانند OpenGL تولید می شود. هر دو شی فوق را می توان برای تولید قطعه بعد از مرحله شطرنجی استفاده کرد و قطعه را می توان بعد از عملیات مربوطه به عنوان پیکسل فراخوانی کرد. خروجی نهایی این مرحله یک تصویر تولید شده است که برای نمایش در بافر فریم قرار می گیرد. و شی بافت از طریق پردازش فرمان و تنظیم قالب بافت توسط رابط گرافیکی API مانند OpenGL تولید می شود. هر دو شی فوق را می توان برای تولید قطعه بعد از مرحله شطرنجی استفاده کرد و قطعه را می توان بعد از عملیات مربوطه به عنوان پیکسل فراخوانی کرد. خروجی نهایی این مرحله یک تصویر تولید شده است که برای نمایش در بافر فریم قرار می گیرد.
4. حالت موازی وظایف و حالت مشارکتی داده در خط لوله تجسم بلادرنگ
نرخ فریم مورد نیاز برای تجسم بلادرنگ تا 15 فریم در ثانیه (FPS) یا بیشتر است، در حالی که نرخ فریم بیش از 60 فریم در ثانیه فراتر از توانایی حساس درک شده چشم انسان است [4] .]. بنابراین زمان رندر شدن هر فریم تقریباً 0.0167 تا 0.067 ثانیه است. از آنجایی که نوسانات فوق العاده نرخ فریم به طور چشمگیری بر تجربه کاربر تأثیر می گذارد، برای اکثر برنامه های تجسم در زمان واقعی، دستیابی به نرخ فریم پایدار، مانند نرخ فریم ثابت برای فیلم ها در 24 فریم در ثانیه یا 30 فریم در ثانیه، یک نیاز اساسی است. در این مقاله، خط لوله تجسم بلادرنگ 3DGIS شهری تحلیل شده است. با این حال، شرایط بصری متفاوت بین فریمها میتواند باعث عدم تعادل بزرگ در دادهها شود، که منجر به عدم تعادل بار کاری پردازنده و ایجاد توقف یا تاخیر در رندر فریم میشود.25 ]. این روش میتواند به طور موثری زمانهای پردازش را حل کند، اما نمیتواند از نوسانات بین نرخ فریم جلوگیری کند.
این مقاله یک مدل مشارکتی مبتنی بر اشتراکگذاری فهرست دادهها در طول پردازش دادههای صف هر مرحله پیشنهاد میکند. یک صف داده که می تواند به صورت موازی عمل کند، با توجه به روابط بین مقدار داده های ورودی و خروجی وظایف بعدی در خط لوله تنظیم می شود. کارهای قبلی پس از اتمام کار، نتایج را در صف می نویسند و کار زیر وضعیت های صف را نظارت می کند. یعنی زمانی که سیگنالهای داده تغییر میکنند، وظیفه دادهها را بهعنوان پارامترهای ورودی برای تکمیل فرآیند اجرا میکند و سپس نتایج را بهعنوان پارامترهای ورودی جدید به صفهای وظایف زیر ارسال میکند. صف مشترک وظایف مختلف با یک مقدار خاموش در globe اطمینان حاصل می شود که به طور مداوم خوانده و نوشته می شود. پردازش تمام وظایف و صف های مشترک در شکل 3 نشان داده شده است. وظیفه ورودی تعامل، صف عملیات تعاملی و دستورالعمل های حسگر را برای دریافت داده های ورودی نظارت می کند. پس از اتمام کارها، خروجی در صف نقطه بصری و دستورات نوشته می شود. وظیفه محاسبه شرایط بصری داده های ورودی را از صف نقطه بصری و دستورات به دست می آورد، از مختصات نمای frustum قابل مشاهده برای محاسبه پارامترهای view frustum استفاده می کند و نتیجه را در صف view frustum می نویسد. وظیفه محاسبه دید، صف frustum دید را برای به دست آوردن یک فروستوم جدید نظارت می کند، و یک لیست قابل مشاهده از گره های نمودار صحنه را می توان با فرآیند پیچیده محاسبه دید در صف گره های صحنه قابل مشاهده نمودار صحنه نوشت. وظیفه انتخاب LOD داده ها را برای انجام محاسبه پارامترهای LOD برای هر گره نمودار صحنه قابل مشاهده می گیرد. و در نهایت خروجی ها در صف گره های قابل مشاهده با LOD نوشته می شوند. مدیریت کش وظیفه از پارامترهای LOD و گره های نمودار صحنه قابل مشاهده برای محاسبه اندازه بافر مورد نظر و تخصیص بلوک های مناسب به صف بلوک های کش موجود استفاده می کند. در همان زمان، لیست داده ها باید بارگذاری شده و در صف وظایف بارگذاری داده ها نوشته شوند. وظیفه مدیریت thread با اتصال داده های بارگذاری شده به بلوک کش هدف با یک نخ، یک کار رشته ایجاد می کند و سپس کار را در صف بارگذاری نخ ها می نویسد. وظیفه بارگذاری داده ها تغییرات را نظارت می کند و سپس از یک رشته متفاوت برای بارگذاری داده ها استفاده می کند. با توجه به نوع داده دادههای هندسی، دادههای بافت و دادههای جریانی حسگرها، محتوای دادهها توسط انواع داده در صفهای مختلف ذخیره میشود. در آخر،
پیچیدگی محاسباتی نامتعادل و مسائل دسترسی وابسته به داده بین فریم ها می تواند باعث عملکرد ناهمزمان در هر فریم در طول رندر بلادرنگ شود. بنابراین، یک کنترل همگام سازی برای متعادل کردن داده ها و پردازش برای درون فریم و درون فریم مورد نیاز است. ما یک مدل مشارکتی موازی کار را بر اساس صف داده مشترک طراحی کردیم. شکل 4وظایف و فرآیند همگام سازی صف را نشان می دهد. وقتی فریم شروع می شود، عملیاتی به نام همگام سازی قاب درونی، تمام صف ها را همگام می کند. آیتم های داده در صف برچسب گذاری می شوند که نشان دهنده فریم قبلی است. این اطمینان را ایجاد می کند که جدیدترین موارد در صف اولویت دارند که ابتدا در فریم فعلی پردازش شوند. هر کار بر تغییر دادههای صف مربوطه نظارت میکند و بر اساس اصل Last In First Out (LIFO) نتیجه صحیح را برای فریم فعلی به دست میآورد. با تخصیص رشتهها برای پردازش دادهها در صفها، همگامسازی فریم و همکاری را به دست میآورد.
از آنجایی که شرایط بصری متفاوت بین فریم ها باعث ایجاد تفاوت در پیچیدگی محاسباتی و مقدار داده می شود، فریم فعلی ممکن است نتواند فرآیند را برای همه موارد موجود در صف تکمیل کند. این مقاله یک روش همکاری را برای تنظیم پویا تعداد رشته ها بر اساس میزان داده بین فریم ها پیشنهاد می کند. در ابتدای فریم جدید، وظیفه یک سیگنال همگام سازی فریم دریافت می کند و موضوع پردازش روی رشته پردازش درون فریم تنظیم می شود. اگر دادههای بیشتری نیاز به پردازش داشته باشد، این وظیفه یک رشته پردازش درون فریمی جدید را از مخزن نخ اعمال میکند تا تغییرات دادههای صف را نظارت کند. در حالی که رشتههای پردازش فریم کنونی در وضعیت نظارت هستند، ما نیازی به اعمال یک نخ از Thread Pool نداریم، بلکه فقط وظایف وظایف را روی رشته فعلی تنظیم میکنیم. پس از اتمام کارها توسط نخ های پردازش درون فریم، تگ شماره فریم به داده های خروجی اضافه می شود. اگر وظایف مرتبط نتیجه را از درون قاب به دست آورند و رشته های پردازش درونی فریم فعلی حالت انتظار را نگه دارند، مستقیماً پردازش می شود. در حالی که نخ فریم داخلی در حال اجرا است، بررسی می کند که آیا رشته پردازش درون فریم وجود دارد یا خیر. اگر وجود داشته باشد، وظایف به رشته پردازش درون فریم متصل می شوند. اگر موضوع پردازش درون قاب به thread pool برگردد، وظایف وظایف به انتهای صف اضافه میشود و تا زمانی که یک نخ بیکار شود منتظر نخهای پردازش درون فریم میماند. اگر تفاوت بین فریم برچسب خروجی و فریم فعلی بیش از سه باشد، باید یک رشته پردازشی جدید برای درون فریم اعمال کند تا داده های وظیفه فعلی را پردازش کند. انطباق نخ ها در قاب یا بین فریم ها می تواند تعادل را در ثبات نرخ فریم حفظ کند.
5. آزمایش ها و نتایج
در این بخش، توسعه یک برنامه ناوبری پیادهروی برای آزمایش روشهای پیشنهادی را مورد بحث قرار میدهیم. اجرای برنامه یک برنامه دسکتاپ با استفاده از VC++ بود. مجموعه داده شهر شهری که ما استفاده کردیم از اداره نقشه برداری و نقشه برداری دولت است که عمومی نیست. شکل 5 بخشی از سناریوی آزمون را نشان می دهد. برنامه آزمایشی با استفاده از رشته های متعدد برای انجام وظایف، همگام سازی بین فریم و همکاری درون فریم را تحقق بخشید. تعداد نخ ها بر اساس رابطه وابستگی ورودی-خروجی بین وظایف مجاور بود. ما یک مسیر پیادهروی را انتخاب کردیم که تقریباً میتوانست به هر قسمتی از منطقه آزمایشی دسترسی داشته باشد و دو موقعیت دیدگاه متفاوت برای بیرون کشیدن عملوند وظایف انتخاب شد.
شرح مجموعه داده: مجموعه داده آزمایشی شامل DEM و DOM برای سطوح زمین و مدلهای سهبعدی با بافتهای ظریف برای ساختمانهای شهری، دادههای جریان دوربین در زمان واقعی برای نظارت بر امنیت، و نمودارها و حاشیهنویسی برای نمایش اطلاعات است. ما از کادر محدود برای نمایش شی استفاده می کنیم و یک درخت R سه بعدی به عنوان شاخص فضایی می سازیم که ساختار اصلی برای ساخت نمودار صحنه است. هر گره برگ نمودار صحنه یک ویژگی صحنه را نشان می دهد و شامل داده های هندسی به شکل مکعب است، بنابراین هزینه عملیات روی هر گره برابر است. در این مقاله، ما کارایی حرکت نمودار صحنه را در نظر نمی گیریم زیرا همه گره های درخت را در حافظه نگه می داریم و هیچ تفاوتی را در آزمون تشخیص نمی دهیم. منطقه آزمایش تقریباً 10 کیلومتر مربع است،
برای آزمون مراحل زیر را انجام می دهیم:
(1) ما داده های اصلی را به یک نمودار صحنه تبدیل کردیم و داده ها را مطابق ساختار گره شاخص فضایی بازیابی کردیم. داده های هندسی و داده های بافت با روش سازماندهی انسجام سازماندهی شدند [ 26 ].
(2) ما دو موقعیت نقطه دید را برای ارزیابی عملوند هر کار در طول زمان اجرا تنظیم کردیم، زمان اجرای وظایف را اندازه گرفتیم و سپس از عملوند و زمان اجرا برای بدست آوردن نسبتی برای هر کار استفاده کردیم. با شروع از اولین کار، از نسبت وظایف مجاور برای تعیین تعداد رشته ها برای هر وظیفه در خط لوله استفاده کردیم.
(3) ما از سه حالت برای پیمایش در یک مسیر و ثبت فریم در ثانیه (FPS)، تعداد اشیاء زیر نقطه دید هر فریم اکسترود استفاده کردیم. سپس نمودارهایی را برای مقایسه نتایج روش های مختلف رسم کردیم.
در جدول 1، عملوند وظیفه ورودی تعاملی (TII) تعداد دستورالعمل ها است. عملوند وظیفه محاسبه شرایط بصری (TVCC) و وظیفه محاسبه دید (TVC) زمان های محاسباتی حسابی توسط هندسه گره ها و جعبه بصری است. عملوند وظیفه انتخاب LOD (TLS) تعداد عملیات انجام شده در CPU است. عملوند وظیفه مدیریت کش (TCM) به عنوان عدد مربوط به مدیریت عملیات بیان می شود. عملوند وظیفه مدیریت نخ (TTM) زمان های عملیات بارگذاری و اتصال است. عملوند وظیفه بارگذاری داده (TDL) به عنوان مقدار داده ای که باید بارگذاری شود بیان می شود و مقدار آن اندازه داده است.
ما با اندازه گیری زمان اجرا برای هر کار، نسبت کمی را برای وظایف مجاور به دست آوردیم. از آنجایی که نسبت وظایف مختلف به طور قابل توجهی متفاوت بود، ما مدلی را برای عادی سازی آنها به واحدی که می تواند توسط نخ ها انجام شود تنظیم کردیم. جدول 2 نتایج را نشان می دهد.
در این تست از دو موقعیت دیدگاه متفاوت برای اندازه گیری عملوند استفاده کردیم و سپس تعداد نخ های مختلف را تعیین کردیم. وظیفه ورودی تعاملی (TII)، کار محاسبه شرایط بصری (TVCC)، وظیفه انتخاب های LOD (TLS)، وظیفه مدیریت حافظه پنهان (TCM) و وظیفه مدیریت رشته (TTM) توسط یک نفر انجام شد. هر کدام را نخ کنید وظیفه محاسبه دید (TVC) و وظیفه رندر زمان واقعی مبتنی بر محتوا (TCBR) از دو رشته استفاده میکند و وظیفه بارگذاری داده در چهار رشته اجرا میشود. در نمای 2، TTI، TLS، TCM و TTM در وضعیت یکسانی قرار داشتند و فقط از یک نخ، TVCC از دو نخ، TVC از چهار رشته، TDL از شش رشته و TCBR از سه رشته استفاده میکردند. ما نسبتی بین عملوندها و زمان اجرای کار به دست آوردیم و از اولین وظیفه شروع کردیم تا تعداد رشته ها را برای کارهای مجاور تنظیم کنیم. ممکن است تعداد رشته ها برای هر کار در فریم های مختلف متفاوت باشد. ما از یک Thread Pool استفاده کردیم تا از تخصیص و حذف مکرر موضوعات برای کارایی جلوگیری کنیم. باید توجه داشته باشیم که برای هر داده بخار حسگر بیدرنگ، یک رشته قابل تنظیم تنظیم میکنیم. در آزمایش ما، یک رشته برای دوربین، رندر دادههای بخار را کنترل کرد.
شکل 6نرخ فریم رندر بیدرنگ را در طول 30 ثانیه برای همان مسیر رومینگ با استفاده از سه روش نشان می دهد. حالت (1) حالت تک رشته ای است، حالت (2) حالت سه رشته ای با یک رشته برای بارگذاری داده ها، ترسیم و سایر وظایف است و حالت (3) چند رشته ای بین فریم و درون فریم است. حالت همگام سازی تغییر قابل توجهی در نرخ فریم بین حالت (1) و حالت (2) وجود دارد زیرا تعداد زیادی از اشیاء بصری در موقعیتهای دید متفاوت وجود دارد. نرخ فریم حالت (2) بیشتر از حالت (1) است، که عمدتاً به دلیل تأثیر اندک بارگذاری نخ به نخ ترسیم است که ناشی از عدم انتظار فرآیند رندر برای پایان فرآیند بارگذاری داده است. در حالت (3)، نرخ فریم برای رندر نسبتاً پایدار است. در اینجا نرخ فریم روی 30 فریم در ثانیه تنظیم شده است. نرخ فریم برای برنامه های کاربردی مهم است. با این حال، تعداد اشیاء ترسیم شده در زیر نرخ فریم از اهمیت بیشتری برخوردار است زیرا توانایی سیستم رندر را نشان می دهد. هرچه بتوان اشیاء بیشتری را با نرخ فریم بالاتر ترسیم کرد، سیستم بهتر است.شکل 7 اشیاء ترسیم شده را در طول هر فریم برای سه حالت فوق فهرست می کند. منحنی ها میانگین تعداد اشیاء ترسیم شده را در طول هر فریم در هر ثانیه نشان می دهند. تعداد منحنی ها برای سه حالت در رنگ های مختلف نشان داده شده است، با حالت (1) در آبی، حالت (2) در قهوه ای و حالت (3) به رنگ قرمز.
شکل 7 تعداد اشیاء ترسیم شده را در حالت های مختلف مقایسه می کند. نرخ فریم بین حالت (1) و (2) هنگامی که تعداد اشیاء ترسیم شده به سرعت افزایش می یابد به طور قابل توجهی تغییر می کند، در حالی که حالت (3) به دلیل افزایش پیوسته در تعداد اشیا، نرخ فریم ثابتی را حفظ می کند. همانطور که در شکل 7 می بینیم، در یک نقطه زمانی (مثلاً ثانیه هشتم) تعداد اشیاء ترسیم شده در حالت (3) کمی کمتر از حالت (1) و حالت (2) است. دلیل این امر این است که با استفاده از مدیریت کش در حالت (3)، حجم داده های اشیاء ترسیم شده به حداکثر اندازه کش می رسد، به این ترتیب، دیگر هیچ شیئی به کش اضافه نمی شود و تمام اشیاء باقی می مانند. پایدار در حافظه پنهان برای حالت (1) و حالت (2) باید توجه داشت که ما دادههای بخار حسگر بیدرنگ را در نظر نگرفتیم، زیرا در صورتی که موضوع رندر توسط پردازش بخار گرفته شود، ترسیم صحنه متوقف میشود.
6. نتیجه گیری
در این مقاله، رویههای اساسی تجسم بیدرنگ 3DGIS شهری برای اولین بار بررسی شد و خط لوله تجسم بلادرنگ تحلیل شد. سپس خط لوله به مراحل مختلف تقسیم شد. علاوه بر این، ما الگوریتمهای محاسباتی محاسباتی وظایف و وابستگی ورودی-خروجی بین وظایف مجاور را در خط لوله تحلیل کردیم. ما ابتدا از عملوند برای نشان دادن هزینه کار و اندازه گیری زمان اجرای بلادرنگ برای بدست آوردن نسبت زمان به عملوند استفاده کردیم. سپس، از اولین وظیفه خط لوله برای ارزیابی شماره واحدهای فرآیند به هر دو وظیفه مجاور شروع کردیم. بر اساس تجزیه و تحلیل موازی کاری در مراحل مختلف خط لوله، ویژگی های موازی داده ها در هر کار با مطالعه الگوریتم های درگیر خلاصه شد. ما از حالت صف اشتراکگذاری برای همکاری با وظایف درون فریم خط لوله و همگامسازی تعادل وظایف درون فریم استفاده کردیم. با دلالت بر تنظیم پویا در رشته ها، ما توانستیم به همگام سازی داده ها برای درون و درون فریم و همکاری در وظایف در طول تجسم بلادرنگ دست یابیم. یک پایه نظری برای حالتهای پردازش موازی کار و موازی داده برای پردازش با عملکرد بالا در تجسم زمان واقعی 3DGIS شهری ساخته شد.
با توسعه گسترده واقعیت مجازی و واقعیت افزوده (VR/AR)، رندر لحظه ای صحنه های واقعیت مجازی با محیط سه بعدی به یک موضوع داغ تبدیل شده است. روش ارائه شده در این مقاله را می توان با تجسم VR/AR 3DGIS شهری تطبیق داد. علاوه بر این، برای نمایش رایج تصاویر نیز مناسب است. در دستگاههای محاسبات بصری واقعیت مجازی و واقعیت افزوده موجود، مانند عینکهای VR/AR و سایر تجهیزات پایانه که محدودیتهایی در حافظه پنهان و قدرت رایانه دارند، دخالتی ندارد. برای کاربرد عملی VR و AR، روش رندر و روش های بازخورد باید بیشتر گسترش یابد.
منابع
- شیائو، ال. ژونگ، ای. لیو، جی. بحث در مورد مشکلات اساسی GIS سه بعدی. J. نمودار تصویر. 2001 ، 6 ، 842-848. [ Google Scholar ]
- زو، کیو. فکر کردن به پیشرفت در فناوری های سه بعدی GIS. Geomat. جهان 2004 ، 2 ، 6-7. [ Google Scholar ]
- کاسیک، دی. دیتریش، آ. گوبتی، ای. یون، اس. تکنیک های تجسم مدل عظیم ; ACM Press: لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- آکنین-مولر، تی. هاینز، ای. Hoffman, N. Real-Time Rendering , 3rd ed.; AK Peters Ltd.: Natick, MA, USA, 2008; پ. 1027. [ Google Scholar ]
- فانک هاسر، TA; Sequin، الگوریتم نمایش تطبیقی CH برای نرخ فریم تعاملی در طول تجسم محیط های پیچیده مجازی . ACM Press: Anaheim, CA, USA, 1993; ص 247-254. [ Google Scholar ]
- آلیاگا، دی. کوهن، جی. ویلسون، ا. بیکر، ای. ژانگ، اچ. اریکسون، سی. هاف، ک. هادسون، تی. استورزلینگر، دبلیو. باستوس، آر. و همکاران MMR: یک سیستم رندر مدل عظیم تعاملی با استفاده از شتاب هندسی و مبتنی بر تصویر . ACM Press: آتلانتا، GA، ایالات متحده آمریکا، 1999; ص 199-206. [ Google Scholar ]
- Correa، WT; کلوسوفسکی، جی تی. Silva، CT iWalk: رندر تعاملی خارج از هسته مدل های بزرگ. در گزارش فنی TR-653-02 ; دانشگاه پرینستون: پرینستون، نیوجرسی، ایالات متحده آمریکا، 2002. [ Google Scholar ]
- یون، اس. سالومون، بی. Gayle, R. Quick-VDR: رندر خارج از هسته وابسته به نمای مدل های غول پیکر. IEEE Trans. Vis. محاسبه کنید. نمودار. 2005 ، 11 ، 369-382. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بورجات، ال. گودین، جی. Blais, F. GoLD: نمایش تعاملی مدل های رنگی و بافتی عظیم. ACM Trans. نمودار. 2005 ، 24 ، 869-877. [ Google Scholar ] [ CrossRef ]
- Yang, J. AnyGL: A Larger Scale Hybrid Distributed Graphics System. پایان نامه دکتری، دانشگاه ژجیانگ، هانگژو، چین، 2002; پ. 145. [ Google Scholar ]
- ژنگ، ایکس. لیو، دبلیو. Lu, C. ذخیره سازی پویا در زمان واقعی و ارائه زمین های عظیم با GPU. J. Comput.-Aided Design Comput. نمودار. 2013 ، 25 ، 1146-1152. [ Google Scholar ]
- یان، سی. Yue، T. GPU روشهای مدلسازی سطح با دقت بالا را برای مدلسازی DEM شتاب داد. محاسبه کنید. مهندس Appl. 2012 ، 48 ، 22-27. [ Google Scholar ]
- آهنگ، X. دوو، دبلیو. Tang, G. تحقیق در مورد پارتیشن بندی داده های تجزیه و تحلیل زمین موازی توزیع شده. J. Natl. دانشگاه فناوری دفاع 2013 ، 1 ، 130-135. [ Google Scholar ]
- وان، ال. هوانگ، ز. Peng, X. یک رویکرد مدیریت کاشی نقشه برداری موثر مبتنی بر NoSQL. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 215. [ Google Scholar ] [ CrossRef ]
- خو، X. لی، جی. Jing, N. تجسم بیدرنگ مدل های شهر سه بعدی بر اساس CityGML. جی. سیست. شبیه سازی 2012 ، 24 ، 1243-1246. [ Google Scholar ]
- زی، جی. Huang, X. تصحیح IKONOS و تأثیر DEM با وضوح های مختلف. ژئو اسپات. Inf. علمی 2012 ، 9 ، 108-111. [ Google Scholar ]
- گوا، اچ. لی، ایکس. وانگ، دبلیو. Lv، Z. Xu, W. یک روش به روز رسانی پویا مبتنی بر رویداد برای پایگاه های داده های جغرافیایی سه بعدی. ژئو اسپات. Inf. علمی 2016 ، 19 ، 140-147. [ Google Scholar ] [ CrossRef ]
- گائو، جی. لیو، پی. کانگ، ایکس. ژانگ، ال. Wang, J. PRS: شبیه سازی آرامش موازی برای نمودارهای عظیم. محاسبه کنید. J. 2016 ، 59 ، 848-860. [ Google Scholar ] [ CrossRef ]
- لی، آر. فن، جی. وانگ، ایکس. ژو، ز. Wu, H. روش جایگزینی حافظه پنهان توزیع شده برای داده های مکانی با استفاده از توالی مبتنی بر مکان مکانی-زمانی. ژئو اسپات. Inf. علمی 2016 ، 18 ، 171-182. [ Google Scholar ] [ CrossRef ]
- لی، دی. تجسم سه بعدی اطلاعات جغرافیایی: مبتنی بر گرافیک یا مبتنی بر تصاویر. Acta Geod. کارتوگر. گناه 2010 ، 2 ، 111-114. [ Google Scholar ]
- شو، اچ. تجزیه و تحلیل داده های بزرگ: شش تکنیک. ژئو اسپات. Inf. علمی 2016 ، 19 ، 119-128. [ Google Scholar ] [ CrossRef ]
- وانگ، ال. چن، دی. دنگ، ز. Huang, F. تجسم توزیع شده در مقیاس بزرگ در شبکه های محاسباتی: یک بررسی. محاسبه کنید. برق مهندس 2011 ، 37 ، 403-416. [ Google Scholar ] [ CrossRef ]
- شراینر، دی. فروشندگان، جی. کسنیچ، جی. Licea-Kane، B. گروه کاری Khronos OpenGL ARB. در OpenGL Programming Guide: The Official Guide to Learning OpenGL, Version 4.3 (8th Edition) (OpenGL) ; Addison-Wesley Professional: نیویورک، نیویورک، ایالات متحده آمریکا، 2013; پ. 986. [ Google Scholar ]
- Buss, SR 3-D Computer Graphics: A Mathematical Introduction with OpenGL ; انتشارات دانشگاه کمبریج: نیویورک، نیویورک، ایالات متحده آمریکا، 2003; پ. 397. [ Google Scholar ]
- ژانگ، ی. روش تجسم تطبیقی مدل های سه بعدی شهر. پایان نامه دکتری، دانشگاه ووهان، ووهان، چین، 2008; پ. 124. [ Google Scholar ]
- لی، دبلیو. دو، ز. لینگ، اف. ژو، دی. وانگ، اچ. گی، ی. سان، بی. ژانگ، X. مقایسه نقشهبرداری آب سطح زمین با استفاده از شاخص تفاوت نرمال شده آب از TM، ETM+ و ALI. Remote Sens. 2013 , 5 , 5530–5549. [ Google Scholar ] [ CrossRef ]
شکل 1. روش تجسم زمان واقعی 3DGIS شهری (سیستم های اطلاعات جغرافیایی سه بعدی).
شکل 2. خط لوله رندر زمان واقعی 3DGIS شهری.

شکل 3. همگام سازی وظایف بر اساس صف داده ها.

شکل 4. مدل مشارکتی موازی کار بر اساس صف داده مشترک خط لوله.

شکل 5. سناریوی منطقه آزمایش.

شکل 6. مقایسه فریم در ثانیه (FPS) تنظیمات رشته برای وظایف خط لوله.

شکل 7. مقایسه شی رندر سه حالت مختلف.

جدول 1. عملیات وظایف. TII، وظیفه ورودی تعاملی. TVCC, Task of Visual Condition Calculation; TVC, Task of Visibility Calculation. TLS، وظیفه انتخاب LOD. TCM، وظیفه مدیریت کش؛ TTM، وظیفه مدیریت موضوع. TDL، وظیفه بارگذاری داده. و TCBR، Task of Content-based Rendering.
جدول 2. واحدهای پردازش وظایف انجام شده توسط رشته ها.
© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر