1. معرفی
اینترنت ابزارهای فنی، نمونههای اولیه و خدمات لازم را فراهم کرده است که در چند سال گذشته امکان ایجاد تحول در بسیاری از فعالیتها از تحقیقات تا فعالیتهای روزمره را فراهم کرده است [ 1 ، 2 ]. دسترسی به داده های باز و ارائه خدمات استاندارد شده به گسترش مفاهیم اشتراک گذاری در اطلاعات مکانی نیز کمک کرده است. ارزش این مفاهیم در حال افزایش است و محققان بیشتر و بیشتر در مورد نتایج اضافی مانند “ترویج تحقیقات جدید از طریق داده های موجود”، “تأیید- رد یا اصلاح نتایج اصلی”، “کیفیت داده های بهتر” و “مسئولیت پذیری بیشتر” بحث می کنند. [ 3 ، 4 ].
در زمینه فوق، تحقیقاتی در خصوص سیستم های مدیریت داده های اندازه گیری در زمینه علمی مهندسی نقشه برداری انجام شده است. بویوند و همکاران [ 5 ] مفهوم سیستم های کاداستر مبتنی بر اندازه گیری را تحلیل کرد و گودچایلد [ 6 ] تفاوت های بین GIS مبتنی بر مختصات و GIS مبتنی بر اندازه گیری را مورد بحث قرار داد. ناوراتیل و همکاران [ 7 ] روی یک مورد آزمایش محصول ESRI ArcGIS، در چارچوب عمومی GIS مبتنی بر اندازهگیری، و Leung و همکارانش کار کردند. [ 8] یک چارچوب کلی برای تحلیل خطا در سیستم های اطلاعات جغرافیایی مبتنی بر اندازه گیری (MBGIS) پیشنهاد کرد. اگرچه هنوز هیچ پیاده سازی پذیرفته شده ای توسعه نیافته است، محققان تلاش می کنند تا بلوک های ساختمانی لازم برای سیستم های اندازه گیری محور را تعریف و ایجاد کنند.
اجرای مفهوم فوق در نقشه برداری زمین یکی دیگر از زمینه های پژوهشی امیدوارکننده است. اندازهگیریهای جمعآوریشده برای این منظور (زوایهها، فواصل، مختصات) در صورت اشتراکگذاری مؤثر، مزایایی را در رابطه با جنبههای رویههای کاری [ 9 ]، مانند:
-
آماده سازی کارآمدتر برای بررسی های بعدی زمین
-
پردازش سریعتر داده ها
-
تبادل داده های بررسی زمین بین طرف های مختلف
-
حل و فصل اختلافات زمین و غیره
به منظور ارائه خدمات به اشتراک گذاری بین کاربران و سیستم های مختلف، تمرکز بر استانداردسازی نمایش اندازه گیری های ژئودزیکی و همچنین روش های دسترسی به اطلاعات مدل شده اهمیت دارد. برای این منظور، کنسرسیوم فضایی باز (OGC) تعدادی استاندارد را برای برآوردن نیازهای فوق ایجاد کرده است. در زمینه Sensor Web Enablement (SWE)، OGC استانداردهای ISO 19156:2011 در مورد مشاهدات و اندازهگیریها (O&M) را توسعه داده است که چارچوب و کدگذاری را برای اندازهگیریها و مشاهدات توصیف میکند. استاندارد O&M به طور گسترده در بسته های نمایندگی دیگر به عنوان قطعات یا الحاقات استفاده و پیاده سازی شده است. مدل دامنه مدیریت زمین (LADM [ 10 ، 11]؛ که قبلا مدل دامنه کاداستر اصلی نامیده می شد، توسط فدراسیون بین المللی نقشه برداران (‘Fédération Internationale des Géomètres’-FIG) به منظور مدل سازی اطلاعات مدیریت زمین طراحی شده است. آخرین ویرایش آن به یک استاندارد بین المللی تبدیل شد (ISO 19152:2012) که خود، در میان دیگران، تعریف ‘OM_Observation’ از ISO 19156:2011 را ادغام می کند. علاوه بر این، سیاست گذاران اطلاعات رسماً مستلزم ایجاد مؤلفه های اشتراک گذاری در زیرساخت برای اطلاعات مکانی هستند. به عنوان مثال، در اتحادیه اروپا، دستورالعمل INSPIRE [ 12 ] دستورالعمل های اجرایی خاصی را در مورد استاندارد O&M [ 13 ] صادر کرده است که تا حدی مدل را گسترش می دهد.
با توجه به نیاز به خدماتی که قابلیت همکاری سیستم را فراهم می کنند، OGC استاندارد سرویس مشاهده سنسور (SOS) را توسعه داده است. استاندارد SOS خدمات وب را برای جستجو، فیلتر و بازیابی داده های مشاهده ای و اطلاعات حسگر تعریف می کند [ 14 ، 15 ]. تحقیقات در حوزه نقشه برداری زمین، با توجه به مدل های اندازه گیری و خدمات قابلیت همکاری، نتایج بسیار امیدوارکننده و علاقه دائمی رو به افزایش را نشان می دهد. Oosterom و همکاران [ 16 ] در میان موضوعات دیگر، واحد فضایی (LADM)، «LA_Source» (LADM) و کلاس «OM_Observation» (ISO 19156) مورد بحث قرار گرفت. کاندااسویکا [ 17] یک چارچوب کلی برای اجرای استانداردهای OGC برای حسگرهای ژئودتیکی در زمینه نظارت بر زمین مورد بحث قرار داد. در نهایت، Vranic و همکاران. [ 9 ] روی داده های نقشه برداری زمین کار کرد و مدلی را برای سیستم های اندازه گیری GNSS بر اساس استاندارد ‘OM_Observation’ توسعه داد.
توسعه یک مدل مشاهده نقشه برداری زمین یک پیش نیاز ضروری به منظور امکان اشتراک گذاری مشاهده کارآمد و استقرار خدمات در بین کاربران است. انگیزه کلیدی از توسعه مخزن مشاهده خام و به ویژه گزینه ذخیره، پرس و جو و بازیابی مشاهدات متعددی که به یک مقدار مشاهده شده اشاره دارند، ناشی می شود. در نظر گرفتن چنین رویکردی مزایای عمده ای را از جنبه های متعدد به دست می دهد که عبارتند از:
-
در دسترس بودن داده های ارائه شده در شرایط عملیاتی مختلف (اپراتور، تجهیزات، پارامترهای محیطی) برای یک کمیت اندازه گیری شده لازم است تا بهترین تقریب از مقدار واقعی یک کمیت اندازه گیری شده تعیین شود.
-
مشاهدات میدانی نقشه برداری زمین به منابع قابل توجهی (زمان میدانی، تجهیزات و اپراتورها) نیاز دارد. بنابراین، مجموعه داده اندازه گیری خام یک محصول گران قیمت برای جمع آوری فقط برای یک بار استفاده است.
-
فقدان استانداردسازی مشاهدات میدانی نقشه برداری زمین، تبادل داده ها را دشوار می کند زیرا سازندگان تجهیزات مختلف از ساختار فایل های مختلف استفاده می کنند.
-
دسترسی به مخزن مشاهدات مدلسازیشده، نقشهبرداران زمین را قادر میسازد تا دادههای خود را با اندازهگیریهای موجود گذشته اعتبارسنجی کنند و از سازگاری محصول با منطقه وسیعتر مورد علاقه اطمینان حاصل کنند.
-
دسترسی به داده های موجود می تواند کیفیت بهتری را ارائه دهد یا هزینه (یا هر دو) محصول نهایی نقشه برداری زمین را کاهش دهد.
در این مقاله، مفهوم و اجرای یک مدل اندازهگیری نقشهبرداری زمین، مطابق با استاندارد O&M OGC توضیح داده شده است. این کار در چارچوب تحقیقاتی Cloud Land Survey (CCLC) [ 18 ] به عنوان یک لایه سیستم ستون فقرات معماری معرفی شده سرچشمه گرفته است . بخش 2 هسته رمزگذاری O&M را ارائه میکند، اما خدمات مشاهده سنسور OGC (SOS) و زبان مدلسازی حسگر (SensorML) را نیز مورد بحث قرار میدهد. بخش 3 اجرای پیشنهادی استاندارد O&M را در حوزه مشاهدات زمینی نقشه برداری زمین، با تمرکز بر سیستم های کل ایستگاه/موقعیت یابی (TPS) تحلیل می کند. بخش 4یک مطالعه موردی را مورد بحث قرار میدهد که در آن از یک سرویس وب SOS استفاده میشود، اسناد درخواست XML توسعه مییابند و حالتهای تجسم سرویس نقشه وب (WMS) به منظور بررسی الزامات برنامه، محدودیتها و مزایای بالقوه نشان داده میشوند.
2. OGC-Sensor Web Enablement Initiative
کنسرسیوم فضایی باز (OGC) یک سازمان بین المللی غیرانتفاعی است که متعهد به ایجاد استانداردهای باز با کیفیت برای جامعه جهانی مکانی است. این استانداردها از طریق یک فرآیند اجماع ساخته شدهاند و بهطور رایگان برای همه در دسترس هستند تا از آن برای بهبود اشتراکگذاری دادههای مکانی جهان استفاده کنند [ 19 ]. این سازمان از سال 1992 به عنوان بنیاد سیستم پشتیبانی تجزیه و تحلیل منابع جغرافیایی (GRASS) وجود داشت. در سال 1994، GRASS به کنسرسیوم Open GIS تغییر نام داد و از سال 2004، به طور رسمی به عنوان کنسرسیوم فضایی باز (OGC) شناخته شد [20 ] . در حال حاضر، OGC دارای بیش از 500 عضو (شرکت ها، دانشگاه ها، سازمان های غیرانتفاعی، سازمان های دولتی، سازمان های تحقیقاتی) است که در توسعه استانداردهای در دسترس عموم مشارکت دارند.21 ].
استانداردهای OGC اسناد فنی هستند که رابط ها یا کدگذاری ها را به تفصیل شرح می دهند. این اسناد، که به عنوان مشخصات انتزاعی شناخته میشوند، دستورالعملهای پروتکل اطلاعاتی رایج را تعریف میکنند که توسط توسعهدهندگان به منظور ایجاد رابطهای باز و رمزگذاریها برای محصول و خدمات خود اعمال میشود. در حال حاضر (سپتامبر 2016)، بیش از 40 استاندارد توسعه یافته است که پایه توسعه قابلیت همکاری در حوزه اطلاعات مکانی و خدمات را تشکیل می دهد. «زبان نشانهگذاری جغرافیایی» (GML)، «زبان نشانهگذاری کلید سوراخ» (KML)، WMS و «سرویس ویژگیهای وب» (WFS) استانداردهای شناختهشدهای در هر پیادهسازی GIS مبتنی بر وب، تجاری یا منبع باز هستند، زیرا استفاده از آنها ارائهدهنده اصلی است. مزایای عملیاتی نسبت به سایر راه حل های دلخواه در مورد قابلیت همکاری سیستم ها.
2.1. فعال سازی وب سنسور
برای اینکه توسعه دهندگان را قادر سازد تا حسگرها و مخازن داده های حسگر را از طریق وب قابل کشف، در دسترس و قابل استفاده قرار دهند، OGC رابط های قابلیت همکاری و رمزگذاری های ابرداده را مشخص کرده است که ادغام شبکه های حسگر ناهمگن در زیرساخت اطلاعات را تسهیل می کند [22 ] . استانداردهای Sensor Web Enablement (SWE) توسط OGC برای تعریف مشخصات ایجاد برنامهها، پلتفرمها و محصولات مربوط به دستگاههای متصل به وب ایجاد شدهاند. هر یک از استانداردهای OGC زیر برای رسیدگی به الزامات مختلف ابتکار چارچوب SWE توسعه یافته است.
-
مشاهدات و اندازهگیریها (O&M) مدلها و طرحواره XML را برای رمزگذاری مشاهدات و اندازهگیریهای حسگر تعریف میکند ( بخش 2.2 ).
-
زبان مدل حسگر (SensorML) (در حال حاضر نسخه 2.0) چارچوبی را برای توصیف ویژگیها و قابلیتهای حسگرها و سیستمهای مرتبط با اندازهگیری و تبدیل پس از اندازهگیری فراهم میکند. با استفاده از SensorML، توسعهدهنده میتواند مدلها و طرحوارههای XML را برای توصیف هر فرآیندی (اندازهگیری سیستم حسگر یا پردازش پس از اندازهگیری) تعریف کند، اگرچه برای سیستمهای حسگر و فرآیندهای مشاهدات حسگر مناسبتر است. در زمینه این مقاله، SensorML به عنوان ارائهدهنده اطلاعات در مورد ویژگیهای حسگر و فرآیند اکتساب مشاهدات مورد بحث قرار میگیرد.
-
سرویس مشاهدات حسگر (SOS) استانداردی برای تعریف رابط وب سرویس برای درخواست، فیلتر کردن و بازیابی مشاهدات و اطلاعات سیستم حسگر است ( بخش 2.3 ).
علاوه بر این، SWE همچنین شامل استانداردهای زبان مدل مبدل (TML)، سرویس برنامهریزی حسگر (SPS)، سرویس هشدار حسگر (SAS) و سرویسهای اطلاع رسانی وب (WNS) [23] است که به مفاهیم و عملکردهایی اشاره دارد که در مورد بحث قرار نخواهند گرفت . زمینه این مقاله
2.2. ISO 19156:2011: مشاهدات و استانداردهای اندازه گیری
استاندارد مشاهده و اندازهگیری OGC، که با عنوان ISO 19156:2011 منتشر شده است، از فعالیت فعالسازی وب حسگر OGC (SWE) سرچشمه گرفته است، همانطور که قبلاً بحث شد. در زمینه SWE، استاندارد O&M مدل ها و طرحواره XML را برای رمزگذاری مشاهدات و اندازه گیری های حسگر تعریف می کند.
“اندازه گیری” به عنوان فرآیند “به دست آوردن تجربی یک یا چند مقدار کمیتی که به طور منطقی می تواند به یک کمیت نسبت داده شود” تعریف شده است [ 24 ]. مشاهده عبارت است از “عمل مشاهده یک ویژگی، هدف از مشاهده ممکن است اندازه گیری یا تعیین ارزش یک ویژگی باشد” (ISO/DIS 19156:2010). هر دوی این مفاهیم نزدیک به هم شامل کنش (فرآیند)، موضوع (ویژگی مورد علاقه)، ویژگی برای اندازه گیری و نتیجه فرآیند هستند. این رویکرد انتزاعی توسط تعریف استاندارد O&M اتخاذ شده است به طوری که مدل نهایی می تواند در طیف گسترده ای از حوزه های کاربردی قابل اجرا باشد. استاندارد O&M [ 25] به عنوان ویژگی های کلیدی یک مشاهده، «featureOfInterest»، «observedProperty»، «روال» و «نتیجه» را تعریف می کند.
عنصر ‘procedure’ که به عنوان کلاس ‘OM_Process’ ارجاع داده می شود، شرح فرآیندی را که برای تولید نتیجه مشاهده استفاده می شود، تعریف می کند. یک نمونه از ‘OM_Process’ اغلب یک ابزار یا حسگر است، اما ممکن است یک ناظر انسانی، یک شبیهساز یا یک فرآیند یا الگوریتم اعمال شده برای نتایج اولیهتر مورد استفاده به عنوان ورودی باشد [26 ] . همانطور که در چارچوب استاندارد O&M تعریف شده است، انتزاعی است. هیچ ویژگی، عملیات یا ارتباطی ندارد و باید برای مناسب شدن برای ویژگی مشاهده شده گسترش یابد.
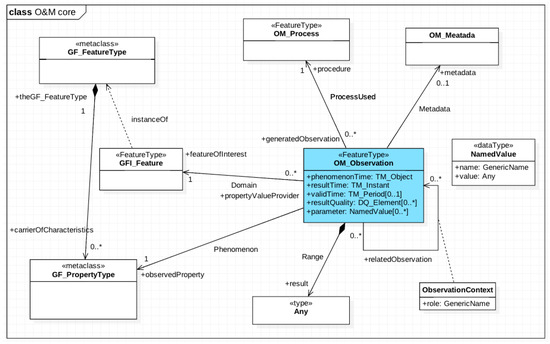
“featureOfInterest” یک ویژگی از هر نوع است (ISO 19109، ISO 19101) [ 27 ، 28 ]، که نمایشی از شیء دنیای واقعی است، که مشاهده در مورد آن انجام می شود. پدیده ای که توسط مدل مشاهده می شود توسط عنصر ‘observedProperty’ ارجاع داده می شود و می تواند یک مقدار اسکالر منفرد یا یک توصیفگر پدیده چند جزء ترکیبی باشد. در نهایت، عنصر “نتیجه” حاوی مقدار تولید شده توسط رویه است. نوع نتیجه مشاهده باید با ویژگی مشاهده شده مطابقت داشته باشد و مقیاس یا محدوده برای مقدار باید با کمیت یا نوع دسته سازگار باشد. شکل 1 (ایجاد شده بر اساس استاندارد مشاهده و اندازه گیری OGC [ 25]) نمودار کلاس اصلی مدل مفهومی O&M را نشان می دهد که با طرح طبقه بندی بالا تراز شده است.
2.3. سرویس مشاهده سنسور
OGC سرویس مشاهده سنسور (SOS) را تعریف میکند (این مقاله به مشخصات SOS 2.0 اشاره میکند) به عنوان استانداردی که «یک API برای مدیریت سنسورهای مستقر و بازیابی دادههای حسگر و بهویژه دادههای «مشاهده» ارائه میکند.» [15 ] . هدف SOS فراهم کردن دسترسی به مشاهدات از حسگرها و سیستم های حسگر به روشی استاندارد است که برای همه سیستم های حسگر سازگار باشد. به منظور سازگاری با تعریف آن، SOS مجموعه ای از عملیات را مشخص می کند که می تواند برای درخواست داده های موجود (عملیات برای مصرف کننده داده های حسگر) یا برای انتشار اطلاعات (عملیات برای ناشر داده های حسگر) استفاده شود. اینها به عملیات اصلی و سه الحاقیه طبقه بندی می شوند.
کلاس الزامات SOS ‘Core’ سه عملیات برای بازیابی داده ها از مخزن تعریف می کند. “GetCapabilities” به مشتریان اجازه می دهد تا به فراداده سرویس یک نمونه سرویس خاص دسترسی داشته باشند. “DescribeSensor” برای درخواست اطلاعات توصیفی حسگر دقیق طراحی شده است. معمولاً زبان مدل حسگر (SensorML) یا زبان نشانه گذاری مبدل (TML که به ندرت استفاده شده است و بازنشستگی استاندارد مورد بحث است [ 29]]) برای رمزگذاری پاسخ به این درخواست استفاده می شود. در نهایت، عملیات «GetObservation» دادههای مشاهدهای را که بر اساس مشخصات مشاهده و اندازهگیری ساختار یافتهاند، بازیابی میکند، که توسط ویژگیهای مکانی، زمانی و موضوعی فیلتر شدهاند. سه عملیات فوق از نمایه اصلی SOS اجباری است و باید توسط هر پیاده سازی SOS ارائه شود.
«افزودن تراکنش» به سه عملیات اشاره دارد که به کاربر اجازه میدهد دادهها و حسگرهای جدید را در SOS ثبت کند و همچنین مشاهدات جدیدی را وارد کند. درخواست “InsertSensor” یک توضیح SensorML از سنسور را ارسال می کند تا اضافه شود. پاسخ شناسه حسگر اختصاص داده شده را برمی گرداند که می تواند به عنوان پارامتری از عملیات “InsertObservation” برای افزودن مشاهدات جدید استفاده شود. عملیات “DeleteSensor” امکان حذف حسگرهای ثبت شده و همه مشاهدات مرتبط با آنها را فراهم می کند. عملیات فوق به صورت اختیاری در سیستم های SOS پیاده سازی شده اند.
2.4. پیاده سازی ها – الحاقات
استانداردهای O&M بر حسب نیاز در طیف وسیعی از پروژهها، استانداردها و دستورالعملهایی که به مدلسازی رویه مشاهده اشاره دارند، پیادهسازی شدهاند [ 30 ، 31 ، 32 ]. این مقاله به بررسی مفاهیم در چارچوب مدیریت و اجرای اطلاعات نقشه برداری زمین می پردازد. بنابراین، سه مورد مرتبط با زمینه مهندسی نقشه برداری ذکر می شود، یعنی دستورالعمل های INSPIRE برای استفاده O&M و SWE، استانداردسازی اداره زمین FIG با تمرکز بر نقشه برداری و نمایش های فضایی و Vranic و همکاران. اجرای O&M GNSS.
کمیسیون اروپا چارچوب زیرساختی برای اطلاعات فضایی در اتحادیه اروپا (INSPIRE) را ایجاد کرد و درخواست کرد که دادهها یک بار جمعآوری شده و مجدداً مورد استفاده قرار گیرند. در چارچوب این ابتکار، یک سند ویژه که به مشاهده و اندازهگیری و استانداردهای فعالسازی وب حسگر اشاره دارد، تدوین شده است. با توجه به این واقعیت که استاندارد O&M یک چارچوب کلی برای ارائه داده های اندازه گیری ارائه می دهد، راه های زیادی برای استفاده از ساختارهای اصلی وجود دارد. دستورالعملهای ارائهشده سازگاری بین برنامههای INSPIRE را تضمین میکند، بنابراین باید در تمام مضامین INSPIRE که ادغام یا ارجاع به استاندارد O&M هستند در نظر گرفته شوند [ 13]]. سند توسعهیافته مفاهیم اساسی استاندارد O&M را همراه با پارادایمهای کاربردی خاص مورد بحث قرار میدهد.
فدراسیون بین المللی نقشه برداران (FIG) مدل دامنه مدیریت زمین را توسعه داده است. در درجه اول، به عنوان “مدل دامنه کاداستر اصلی” نامگذاری شد، و در نهایت، به ISO 19152:2012 تبدیل شد، مدل دامنه مدیریت اطلاعات جغرافیایی – مدیریت زمین (LADM) [10 ]]. هدف اصلی این کار، تعریف یک مدل مفهومی مرتبط با احزاب، حقوق مالکیت، واحدهای فضایی، منابع مکانی (پیمایش) و بازنماییهای فضایی (هندسه و توپولوژی) بود. مدلسازی منابع فضایی با توسعه کلاس توصیفشده ‘LA_SpatialSource’ انجام میشود که بخشی جدایی ناپذیر از سیستم مدیریت زمین را نشان میدهد. تعریف کلاس فوق استاندارد OM_Observation و OM_Process of O&M را پیاده سازی می کند، که نشان دهنده رابطه مفهومی قوی بین داده های اندازه گیری نقشه برداری زمین و مفاهیم مورد بحث است. ون اوستروم و همکاران [ 16 ] استفاده از مدل فوق را در زمینه مدیریت زمین بیشتر مورد بحث قرار داد و نمونه هایی از سطح اندازه گیری نقشه برداری زمین را ارائه کرد.
در نهایت، Vranic و همکاران. [ 9 ] استفاده از مدل O&M OGC را در زمینه نقشه برداری زمین مورد بحث قرار داد. به طور خاص، اجرای استاندارد معرفی شد و مدلی برای اندازه گیری GNSS توسعه یافت. این کار استفاده از مدل را در زمینه جامعه نقشه برداری کرواسی، ارائه مفاهیم استفاده و مزایای اجرای O&M در داده های نقشه برداری زمین مورد بحث قرار داد. شکل 2 مدل GNSS توسعه یافته را نشان می دهد.
رویکرد فوق نقطه اندازه گیری را به عنوان ویژگی مورد نظر در نظر می گیرد، در حالی که فرآیند با مشخصات و مدل گیرنده توصیف می شود. نتیجه مجموعه ای از اطلاعات است که شامل نام، موقعیت، کیفیت اندازه گیری، نوع نقطه و بنای نقطه است.
3. تعریف مدل
بر اساس ادبیات بررسی شده و کار مرتبط، مدلی که به اندازهگیریهای نقشه برداری اراضی اشاره دارد، مورد بحث قرار خواهد گرفت و کلاسهای مربوطه که مدل را تعریف میکنند، توسعه خواهند یافت. با استفاده از مدل مفهومی OGC O&M، مشاهدات پیمایش زمین را میتوان مدلسازی کرد و به عنوان منبعی برای سیستمهای مدیریت دادههای مبتنی بر اندازهگیری، ابزارهای تحلیلی که از دادههای خام و پلتفرمهای تبادل مشاهده جهانی سود میبرند، استفاده کرد. تجزیه و تحلیل زیر بر اساس الگوی بحث بنیادی “ویژگی مشاهده شده با منافع-فرایند-نتیجه” الگوی بحث ساختار یافته است.
3.1. ویژگی مورد علاقه
اولین ملاحظاتی که در فرآیند ایجاد مدلی که به اندازهگیریهای نقشه برداری اراضی اشاره میکند، انجام میشود، تعریف واضح مفهوم «ویژگی مورد علاقه» است. بر اساس ISO 19109، باید نمایشی از هدف مشاهده باشد، به عنوان شیء دنیای واقعی که مشاهده در مورد آن انجام می شود. فرآیند اندازه گیری نقشه برداری زمین در مورد به دست آوردن داده هایی است که رابطه بین دو نقطه در فضا را توصیف می کند. اولی به عنوان یک پایگاه مشاهده و دیگری به عنوان یک شی از راه دور عمل می کند. در حالی که به راحتی می توان فهمید که ویژگی مورد علاقه نقطه پایه نیست، باید توجه داشت که شی از راه دور نیز چنین نیست. ایستگاه های کل و تجهیزات GNSS برای اندازه گیری کمیت ها استفاده می شود، مانند:
-
فاصله شیب از نقطه تنظیم تا هدف از راه دور
-
جهت افقی از نقطه تنظیم تا هدف از راه دور
-
زاویه عمودی از نقطه تنظیم تا هدف از راه دور
-
زمان یا فاز حامل که به سیگنال دریافتی از پایگاه تنظیم شده و ارسال شده از وسیله نقلیه فضایی اشاره دارد.
ملاحظات فوق روشن می کند که این نوع مشاهده به یک بردار سه بعدی اشاره دارد. در زمینه این مقاله، ویژگی مورد علاقه مدل، نمونه فیزیکی نمایش بردار پایه-هدف است که بردار قابل مشاهده نامیده می شود ( شکل 3 ).
3.2. روند
پس از تعریف ویژگی مورد نظر، لازم است روش اکتساب مشاهده شرح داده شود. به منظور تعیین ساختار کلاس «فرآیند»، لازم است ویژگی هایی که به طور منحصر به فرد مدل را تعریف می کنند، شناسایی شوند. در نقشه برداری زمین، روش اکتساب اندازه گیری به شدت با مقداردهی اولیه تجهیزات مرتبط است. هر زمان که یک ایستگاه کل روی یک نقطه پایه تنظیم می شود، پارامترهای خاصی وجود دارد که تنظیم و ثابت می شوند، که تا تنظیم نقطه پایه بعدی بدون تغییر باقی می مانند. این اطلاعات نه تنها در طول پردازش داده ها مورد نیاز است، بلکه حاوی ابرداده هایی است که امکان ارزیابی اندازه گیری های جمع آوری شده، نتیجه نهایی و خود فرآیند را فراهم می کند. به طور خاص، در زمینه این مقاله، ویژگی های زیر برای توصیف کلاس “فرآیند” مورد خطاب قرار می گیرند.
تجهیزات مورد استفاده یک شی است که باید توضیح داده شود. اطلاعاتی که به دقت اشاره دارد برای ارزیابی مشاهدات جمع آوری شده یا مقایسه مجموعه های مختلف اندازه گیری مورد نیاز است. ساختار شناسایی کل ایستگاه شامل سازنده، مدل ابزار و تاریخ آخرین کالیبراسیون است. علاوه بر این، مشخصات دقت در مورد انواع اندازه گیری های موجود مورد نیاز است که عبارتند از دقت مشاهده زاویه ای (در صورت وجود به طور جداگانه افقی و عمودی) و دقت مشاهده فاصله.
همانطور که در بالا ذکر شد، هر فرآیند اندازه گیری با مقداردهی اولیه کل ایستگاه در یک نقطه کنترل ایجاد شده شروع می شود. داده هایی که به تنظیم پایه اشاره دارند برای روش محاسباتی مورد نیاز هستند و باید در تعریف مدل پیاده سازی شوند. این شامل اطلاعات مربوط به شناسایی نقطه کنترل است که یک ویژگی توصیفی، یادداشتهای بایگانی و نوع بنای تاریخی است. علاوه بر این، ارتفاع نصب تجهیزات، بر روی نقطه کنترل، اطلاعات لازم را برای استخراج بعد سوم (ارتفاع) برای تمام نقاط مشاهده شده ما فراهم می کند.
در نهایت، داده های ارجاع به اپراتور می توانند اطلاعاتی را برای تخمین یا ارزیابی کیفیت اندازه گیری ارائه دهند. علاوه بر این، سیستم تجهیزات اپراتور می تواند با توجه به تحلیل های آماری بیشتر، تشخیص الگوهای خطای سیستماتیک را ارائه دهد، بنابراین دقت مقادیر تخمین زده شده را افزایش می دهد. بر اساس دومی، اطلاعات تماس، تجربه در نقشه برداری زمین و زمینه تخصص در مدل توسعه یافته ادغام شده است.
3.3. نتیجه املاک مشاهده شده
همانطور که در بالا گفته شد، هر اندازه گیری یک یا چند مقدار کمیتی را ارائه می دهد که به نمونه هندسی بردار قابل مشاهده اشاره دارد. اینها می توانند فاصله بین نقطه تنظیم و هدف از راه دور، جهت افقی که به یک مجموعه اندازه گیری تصادفی اشاره دارد، اما ثابت برای هر مجموعه اندازه گیری، مبدا یا زاویه عمودی که به عنوان زاویه تعریف شده توسط بردار اوج و قابل مشاهده تعریف شده است. موارد فوق، داده های اصلی مشاهداتی هستند که یک مهندس نقشه بردار در این زمینه جمع آوری می کند.
با این وجود، این مقادیر باید با اطلاعات دیگری ارائه شوند که برای تعریف بردار مورد نیاز است، اما همچنین فراداده مشاهدات مربوطه. ارتفاع هدف از راه دور یک ویژگی لازم برای استخراج بعد سوم از اندازه گیری های میدانی است. علاوه بر این، اطلاعات توصیفی باید هم در ویژگیهای غیرساختیافته (یادداشتهای توصیفی) و هم ساختار یافته (نوع نقطه، نوع مشاهده) ثبت شوند.
3.4. نمودار کلاس
بحث فوق دانش لازم را در مورد کار نقشه برداری زمین و زمینه داده برای بررسی الزامات مدل این مقاله فراهم می کند. بر اساس این دانش، توسعهای از مدل اصلی O&M ایجاد شده است که با الزامات خاص نقشهبرداری زمین که قبلاً توضیح داده شد، هماهنگ است. کلاس های این مدل به عنوان “LS_” پیشوند شده اند که مخفف Land Surveying است.
شکل 4 کلاس “LS_Process” را نشان می دهد که پسوندی از کلاس “OM_Process” استاندارد O&M OGC است. هر یک از ویژگیهایی که قبلاً مورد بحث قرار گرفت، پیادهسازی میشوند تا شی «LS_Process» بتواند بهطور مؤثر فرآیند نقشهبرداری واقعی زمین را توصیف کند. علاوه بر این، شکل 5 کلاس “LS_Observation” را نشان می دهد که از کلاس “OM_Complex_Observation” مشتق شده است. LS_Operator، LS_TotalStation، LS_Accuracy و LS_Point برای تعریف و ادغام در مدل موجودیت های مورد بحث بالا از اپراتور، کل ایستگاه، دقت و نمونه نقطه زمین معرفی شده اند. اندازهگیریهای چندگانه (زوایه، فواصل) از طریق «OM_ComplexObservation» مدلسازی میشوند، جایی که نوع رکورد نوع اندازهگیری را نشان میدهد.
4. سرویس مشاهده سنسور: مشاهده مشاهده
تجزیه و تحلیل در مورد بهره وری و مزایای بالقوه ناشی از اتخاذ رویکرد مدلسازی استاندارد O&M مستلزم اجرای یک سرویس قابل همکاری وب است. علاوه بر این، یک مخزن اندازه گیری همراه با یک سرویس وب که امکان دسترسی به اندازه گیری های ذخیره شده را فراهم می کند، می تواند مبنایی برای تحقیقات آینده در مورد مفاهیم تحلیل اطلاعات مبتنی بر داده، در حوزه نقشه برداری زمین، مانند تجزیه و تحلیل شبکه بدون نظارت یا «محیط تجهیزات-اپراتور-محیط» فراهم کند. الگوریتم های ارزیابی استاندارد سرویس مشاهده حسگر (SOS) که توسط OGC تعریف شده است، مشخصات عملیات مورد نیاز را ارائه می دهد و توسط زبان های برنامه نویسی مختلف و چارچوب های کاربردی پیاده سازی شده است [ 33] .]. لازم به ذکر است که ملاحظات مربوط به مسائل مربوط به عملکرد هنگام مدیریت داده های انبوه مکانی-زمانی پدیدار می شوند. بنابراین، علاقه پژوهشی در مورد استفاده از فناوری های پیشرفته مورد بحث است (به عنوان مثال، برنامه های کاربردی مبتنی بر NoSQL، MongoDB یا موتور SQL Cloudera Impala [ 34 ، 35 ]).
در زمینه این مقاله، نرم افزار 52 درجه شمال SOS به عنوان چارچوب پیاده سازی پذیرفته شده است زیرا به طور گسترده استفاده می شود، منبع باز و به طور مداوم به روز می شود. محیط سرور بر روی توزیع سیستم عامل لینوکس اوبونتو 14.04 با JRE7 و تامکت نصب شده است. داده ها در یک سیستم مدیریت پایگاه داده رابطه ای (RDBMS) PostgreSQL 9.1 با پسوند PostGIS 2.1 نصب شده ذخیره می شوند.
ماژول مدیریت 52 درجه شمال SOS به عنوان یک برنامه وب ساخته شده است که توابع مدیریت اداری را با وجود یک رابط کاربری ساده و در عین حال موثر برای استفاده فراهم می کند. از برنامههای افزودنی اصلی، پیشرفته، تراکنشی و مدیریت نتیجه پشتیبانی میکند. مطالعه موردی توصیف شده سه عملیات نمایه اصلی (GetCapabilities، GetObservation، DescribeSensor) را اجرا کرده است تا کاربران بتوانند از سیستم برای حسگرها و مشاهدات موجود پرس و جو کنند. علاوه بر این، عملیات “InsertSensor” و “InsertObservation” از پسوند تراکنش برای تغذیه پایگاه داده با اطلاعات موجود استفاده شده است.
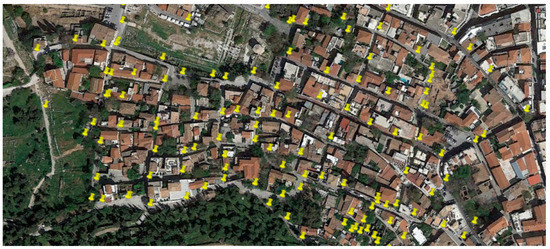
مجموعه داده آزمایشی شامل 41515 مشاهدات TPS است که به صورت میدانی (10379 ویژگی مورد علاقه) در یک منطقه شهری با تراکم بالا جمع آوری شده است. شبکه مرجع متشکل از 210 نقطه کنترل زمینی (GCP) است که بر روی آنها 228 فرآیند مشاهده اولیه راه اندازی شده است، زیرا برخی از GCP بیش از یک بار استفاده شده اند. از 41515 مشاهده (10379 ویژگی مورد علاقه)، 3678 (1226 ویژگی مورد علاقه) به GCP اشاره دارد و زیر مجموعه داده ای را تعریف می کند که برای تعریف هندسه شبکه مرجع پردازش می شود. فرآیند مشاهده برای هر ویژگی مورد نظر یک تا چهار مشاهدات را ارائه می دهد (زاویه افقی، زاویه عمودی، فاصله شیب، ارتفاع هدف، همانطور که در شکل 3 نشان داده شده است ). شکل 6بخشی از توزیع GCP (پین زرد) را روی تصویر ماهواره ای نشان می دهد و شکل 7 شبکه مرجع مربوطه (خطوط بنفش) را نشان می دهد.
هدف این مطالعه موردی بررسی کاربرد و الزامات اجرای سرویس مشاهده حسگر است. تحت این ملاحظات، تغذیه مستقیم پایگاههای داده PostgreSQL روشی نیست که باید دنبال شود. درعوض، درخواستهای XML (POST) مناسب توسعه داده شدهاند تا تمام دادههای موجود را بتوان با استفاده از عملیات «InsertSensor» و «InserObservation» تراکنشی SOS وارد کرد. درخواست های XML فوق با در نظر گرفتن الزامات مدل O&M نقشه برداری توصیف شده ( بخش 2 ) و ویژگی های خاص سیستم پیاده سازی انتخاب شده توسعه یافته اند.
4.1. قرار دادن سنسور
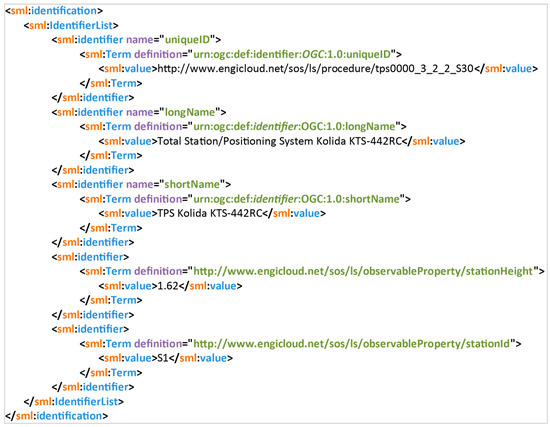
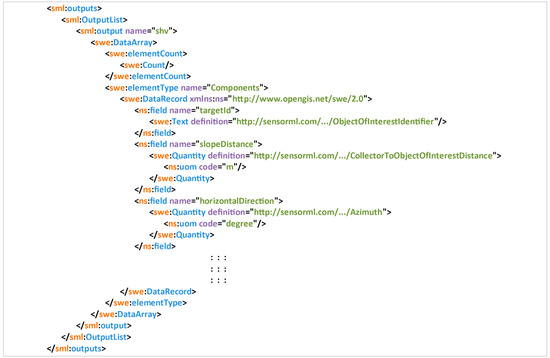
مدل پیشنهادی تجهیزات TPS را به عنوان یک دستگاه حسگر در نظر میگیرد که هر بار که یک روش اندازهگیری اولیه میشود، یک فرآیند مربوطه را نمونهسازی میکند. عملیات حسگر درج، رابط مبتنی بر وب ارائه شده توسط SOS برای انتشار سیستمهای حسگر (فرآیندها در چارچوب استاندارد O&M) به مخزن توسعهیافته است. 52° North SOS از نسخه SOS2.0 پشتیبانی میکند، در حالی که حسگرهای منتشر شده بر اساس مشخصات SensorML2.0 (“Sensor Markup Language” (SML) فضای نام) توصیف شدهاند. سند XML که اطلاعات مربوطه را ساختار می دهد، در میان سایر داده ها، از سه بلوک ساختمانی مهم تشکیل شده است که به موجودیت حسگر فرآیند اشاره دارد. اولی اطلاعاتی را در بر می گیرد که خود فرآیند را توصیف و شناسایی می کند. شکل 8بخش XML را نشان می دهد که اطلاعات شناسه منحصر به فرد، فیلدهای توضیحات و پارامترهای راه اندازی را ارائه می دهد. بلوک ساختمانی دوم ( شکل 9 ) برای تعریف خروجی فرآیند (نوع اندازه گیری ها، واحدها و غیره) استفاده می شود و بلوک سوم ( شکل 10 ) اطلاعاتی در مورد موقعیت سنسور ارائه می دهد.
4.2. درج مشاهده
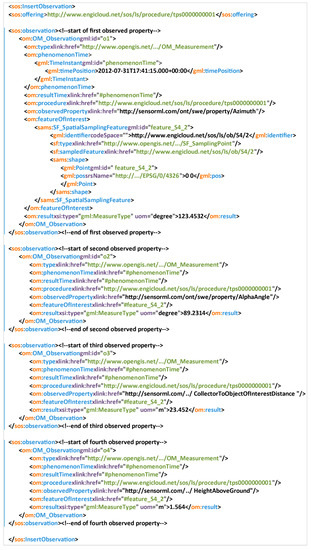
“درج مشاهده” عملیات مورد نیاز است، همراه با “درج حسگر” که برای تغذیه مخزن استفاده می شود و همچنین بخشی از عملیات SOS تراکنشی است. پیادهسازی 52 درجه شمال SOS از این عملیات پشتیبانی میکند، مشروط بر اینکه درخواستهای POST مناسب با تعریف حسگر که قبلاً مورد بحث قرار گرفت، تراز باشند. شکل 11یک مثال XML (به استثنای فضاهای نام XML) از درج مشاهدات پیچیده در مخزن را نشان می دهد که از یک زاویه افقی (“آزیموت”)، یک زاویه عمودی (“AlphaAngle”)، یک فاصله شیب (“CollectorToObjectOfInterestDistance”) و هدف تشکیل شده است. ارتفاع (“HeightAboveGround”)، همه به یک ویژگی مورد علاقه اشاره دارند. در اولین ویژگی مشاهده شده، “phenomenonTime” و “featureOfInterest” اعلام شده اند تا در هر چهار ویژگی مشاهده شده تکرار نشوند.
4.3. تجسم
مخزن مورد بحث در بالا حاوی چندین هزار مشاهدات است که باید بر روی سایر مجموعه داده های اطلاعات مکانی و نقشه های پایه تجسم شوند. معمولاً مشاهدات با موقعیتی پیشینی مشخص می شوند و ویژگی های اندازه گیری نقطه مورد نظر را ارائه می دهند. این مقاله یک مورد کاملاً متفاوت را مورد بحث قرار می دهد که چندین چالش و مشکلات را معرفی می کند که باید مدیریت شوند. دو نگرانی در حال ظهور از این واقعیت ناشی می شود که:
-
مشاهدات جمعآوریشده به کمیتهای هندسی اشاره دارد که از آنها برای تعریف فضایی شبکه حسگرها و ویژگیهای مورد نظر استفاده میشود. این یک شبکه آگنوستیک فضایی پیشینی، اما در عین حال هندسی خود توصیف شده است.
-
کمیتهای قابل مشاهده ویژگی یک نقطه شناخته شده را توصیف نمیکنند، بلکه مجموعهای از اطلاعات هندسی را نشان میدهند که به ویژگیهای مورد علاقه از نظر فضایی تعریف نشده اشاره میکنند.
اظهارات بالا نیاز به یک تعریف لایه پردازش پسینی اضافی را تحمیل می کند که باید ابهامات موقعیت یابی را هم در شی حسگر و هم در ویژگی مورد علاقه که توسط مشاهدات ارجاع می شود، کنترل کند. در مصورسازی به اصطلاح «GIS مبتنی بر اندازهگیری (MBGIS)» [ 6 ]، مختصات دیگر به عنوان دادههای ورودی مورد نیاز استفاده نمیشوند، بلکه بهعنوان خروجی از مجموعههای مشاهدات فضایی استفاده میشوند. این رویکرد کاملاً با کار حاضر که مدلها و خدمات مشاهده نقشهبرداری زمین را مورد بحث قرار میدهد، هماهنگ است.
با توجه به اینکه پروژههای معمولی میتوانند شامل چندین هزار مشاهدات باشند، به راحتی میتوان نتیجه گرفت که ادغام پروژههای متعدد در طول زمان، فضا و بعد کاربر، مخازن دادههای بزرگ را ایجاد میکند [ 36 ]. در تحقیقات عمومی “بررسی زمین ابری (CCLC)” [ 18 ]، مشاهده بدون نظارت برای تبدیل مختصات در زمان واقعی توسط یک الگوریتم توسعهیافته به دست میآید.
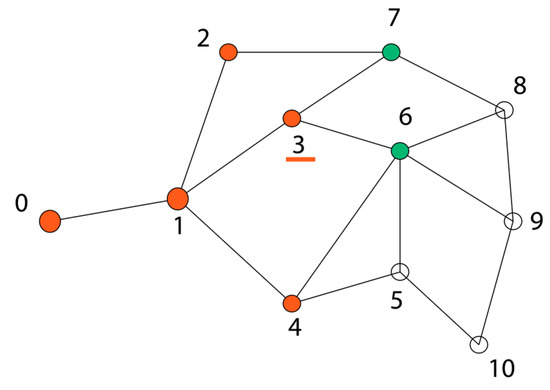
با انتخاب دو گره از شبکه حسگر (S0، S1)، می توان موقعیت S1 و آزیموت S1–S0 را ثابت کرد. از دومی و این واقعیت که مجموعه داده مشاهده سنسور را برای اندازه گیری های زنجیره ای حسگر بر روی مجموعه گره شبکه فراهم می کند، یک روش محاسبه مختصات متوالی از S1-S2 (Sc = S1، Sb = S2) آغاز می شود و در تمام سنسورهای موجود به لبه های حسگر منتشر می شود. . شکل 12 فرمول های محاسباتی اصلی [ 37 ] را نشان می دهد که برای هر مرحله تکرار استفاده می شود، زمانی که i گره فعلی، b گره قبلی (مشتق شده از) و j گره هایی است که باید محاسبه شوند.
شکل 13 و شکل 14 مرحله اول و دوم فرآیند تکرار را نشان می دهد. گره های قرمز مختصات شناخته شده را نشان می دهد، سبز نشان دهنده گره هایی است که باید محاسبه شوند. و خط زیر گره مرحله تکرار فعلی را نشان می دهد. مفاهیم دیگری مانند انحراف مشاهده، آمار خطا، حلقه های شبکه و غیره نیز که خارج از موضوع این مقاله هستند، مدیریت می شوند.
رویکرد فوق هندسه نسبی شبکه بدون نظارت را کنترل می کند. با توجه به اینکه کاربر مختصات تقریبی برای برخی از گره ها ارائه می دهد یا اینکه رجیستری مخزن دارای سوابق موقعیت یابی جلسات پردازش گذشته برای برخی گره ها است، موقعیت یابی مطلق برای کل شبکه حسگر مشتق شده است. همین اصل برای بقیه ویژگی های مشاهده شده (آنهایی که بخشی از شبکه حسگر نیستند) اعمال می شود، به طوری که همه ویژگی های مورد علاقه به صورت مکانی تعریف می شوند. لایه مشاهده پس پردازش که قبلا توضیح داده شد بین مخزن مشاهده و لایه تجسم تزریق می شود ( شکل 15 ).
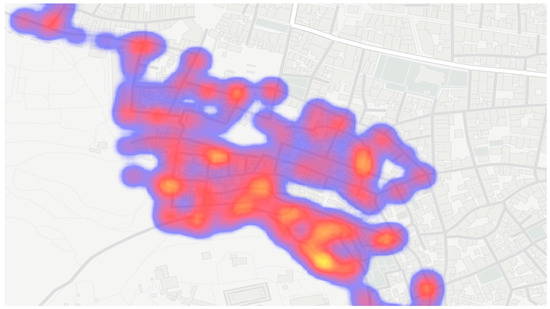
ابهام موقعیت کاهش مییابد، و شاخصهای انتخابی مشاهدات موجود نشان داده میشوند و بر روی سایر مجموعههای داده در صورت تقاضا همپوشانی میشوند. در چارچوب تحقیق حاضر، حالتهای تجسم مختلفی اعمال و نشان داده شده است. شکلهای زیر بخشی از پیادهسازی سرویس WMS پویا هستند که با اعمال کوئریها، توابع و تبدیلهای مناسب، اندازهگیریهای موجود را ارائه میدهند. شکل 16 نقشه حرارتی چگالی اندازه گیری نسبی را بر اساس تعداد اندازه گیری های موجود در هر نقطه پایه TPS نشان می دهد. حتی اگر هیچ پردازش داده خاصی استفاده نمی شود، می توان مناطقی را که فاقد اندازه گیری هستند، مکان یابی کرد.
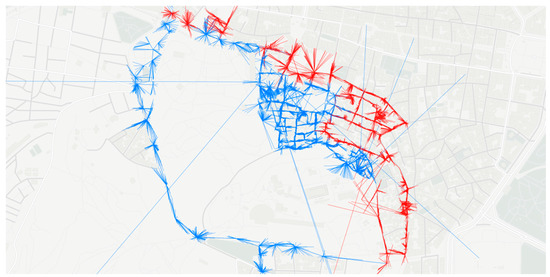
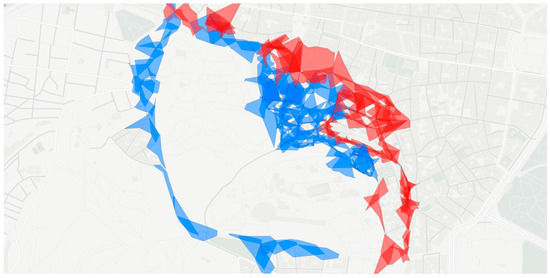
شکل 17 و شکل 18 یک تصویر دوبعدی از بردار فیزیکی سه بعدی “پایه هدف” را ارائه می دهند که ویژگی مورد علاقه همانطور که در بخش 3.1 توضیح داده شده است.. فرآیندهای اندازه گیری را می توان به عنوان مراکز همگرا خطوط نشان داده شده شناسایی کرد. اینها موقعیت های تسویه تجهیزات (حسگر) هستند. خطوط مشاهده به جهت ویژگی مورد نظر اشاره می کنند، در حالی که طول نشان دهنده فاصله شیب است. تمام 41515 مشاهدات TPS که در میدان جمعآوری شدهاند شبکه خام 10379 ویژگی مورد علاقه را تشکیل میدهند، در حالی که پوشش با ترکیبهای مختلف «اپراتور-تجهیزات» با رنگهای مختلف نشان داده میشود (گروه کاری A با آبی و گروه کاری B با قرمز نشان داده شده است. ). مشاهدات اشتباه را می توان مستقیماً به عنوان خطوطی که به خارج از ناحیه مورد نظر اشاره می کنند، که فاصله آنها از پایه بسیار خارج از محدوده معمول است، مشاهده می شود.
برای هر ایستگاه پایه، می توان یک چند ضلعی بافر ایجاد کرد که حاوی تمام نقاطی است که مشاهدات برای آنها به دست آمده است (به استثنای مشاهدات اشتباه شناسایی شده با اعمال حداکثر آستانه فاصله، بر اساس مشخصات تجهیزات). این چند ضلعی ها مرز بیرونی نقاط را برای هر فرآیند مشاهده نشان می دهند. آنها توسط تابع ایجاد چند ضلعی بدنه محدب افزونه PostGIS به سیستم مدیریت پایگاه داده رابطه ای PostgreSQL (RDBMS) ایجاد می شوند. مجموع این چند ضلعی ها، هنگامی که روی یکدیگر قرار می گیرند، پوشش منطقه ای را که موضوع روش اندازه گیری بوده است، فراهم می کند. شکل 19 به وضوح نشان دهنده الگوی پوشش و مناطقی است که فاقد مشاهدات هستند (در مقایسه با شکل 16 ). شکل 20مناطق تحت پوشش هر دو اپراتور را برجسته می کند. بنابراین، انتظار می رود که به سطح دقت بالاتری دست یابد (ناحیه زرد نشان دهنده ناحیه مشاهده همپوشانی برای هر دو گروه است).
5. نتیجه گیری ها
دلایل متعددی وجود دارد که نشان می دهد و اندازه گیری های نقشه برداری زمین را به عنوان اطلاعاتی با ارزش بالا تعیین می کند و جامعه علمی را برای مدیریت و استفاده مجدد از آن در صورت تقاضا مورد خطاب قرار می دهد. اول از همه، به دست آوردن اندازه گیری نقشه برداری زمین، به بیشتر منابع مورد استفاده در پروژه های هدف نقشه برداری، با در نظر گرفتن ساعات کاری یا تجهیزات فنی، نیاز دارد. علاوه بر این، اطلاعات مکانی جمعآوریشده در میدان، وضعیتی از فضا را در ابعاد زمان ثبت میکند که در زمان بعدی قابل یادآوری نیست. علاوه بر این، بدیهی است که اندازهگیریهای خام حاوی دادههایی هستند که میتوانند در آینده با مجموعه دادههای دیگر برای تولید دانش جدید ترکیب شوند. همین امر در مورد مختصات و نقشه های ایجاد شده به عنوان مجموعه داده محصول در زمان اندازه گیری صدق نمی کند.
همه دلایل فوق نیاز به یک مدل داده را با پیروی از استانداردهایی که قابلیت همکاری را تضمین می کند، تحمیل کرده است. پیادهسازی توسعهیافته، بر اساس استاندارد مشاهده و اندازهگیری OGC، نیازمندیهای مدلسازی مقادیر اطلاعات اندازهگیری شده را برآورده میکند و چارچوبی را برای ایجاد مخازن و خدمات ارائهدهنده دسترسی به مدیریت اطلاعات (ذخیره، پرس و جو)، پردازش و توابع تجسم تنظیم میکند. نمونه اولیه توسعهیافته از استاندارد «سرویس مشاهده حسگر (SOS)» پیروی میکند که توسط پلتفرم ۵۲ درجه شمالی پیادهسازی شده است، و طرحهای XML ارائهشده مدل توسعهیافته را نشان میدهد. در طول این فرآیند، تعدادی از ملاحظات مطرح شد که ماهیت خاص اندازهگیریهای نقشه برداری زمین را در زمینه مورد بحث آشکار کرد.
با توسعه مدلی برای مشاهدات نقشه برداری زمین، ما زیرساخت های حیاتی را تنظیم می کنیم که به ملاحظات عمده طرح اطلاعات فعلی می پردازد، رویکردهای مدیریت داده های جایگزین را امکان پذیر می کند و سناریوهای مورد استفاده جدید را معرفی می کند. چارچوب مورد بحث در بالا به طرق مختلف به مجموعه ای از مزایای در حال ظهور کمک می کند، یعنی:
-
منابع داده پراکنده و انواع فایل را تحت یک طرح داده قابل همکاری یکسان کنید.
-
دسترسی به مشاهدات معتبر موجود را فراهم کنید که در حال حاضر به دلیل فقدان یک مدل اندازه گیری مشترک و خدمات مورد نیاز (به عنوان مثال، اندازه گیری های زمین سنجی داده های ملی).
-
طرح مشاهدات نقشه برداری زمین را با دستورالعمل INSPIRE که استفاده از مدل O&M را مورد بحث قرار می دهد (بر اساس انگیزه دستورالعمل های منتشر شده [ 13 ]) تراز کنید.
-
اشتراک گذاری و استفاده مجدد از داده ها را فعال کنید، بنابراین سودمندی منابع مصرف شده را به حداکثر برسانید.
-
بعد زمانی را به مجموعه دادههای مشاهدات فضایی معرفی کنید، بنابراین انگیزه ایجاد خطا را ایجاد کنید. تشخیص الگوریتم حرکت زمین
-
ارائه یک ماژول حیاتی برای توسعه سیستم های “GIS مبتنی بر اندازه گیری (MBGIS)”.
-
ایجاد انگیزه در تبادل داده و افزایش دقت نهایی با استفاده از مشاهدات همپوشانی.
-
خدماتی را توسعه دهید که نمای کلی رویه نقشه برداری زمین، در دسترس بودن و پردازش داده های داخل زمین را در زمان واقعی ارائه می دهد.
-
مخازن مشترکی را که افراد حرفهای و مقامات دولتی به آنها دسترسی دارند، درگیر کنید، بنابراین امکان اعتبارسنجی متقابل و دسترسی به دادههای رسمی معتبر فراهم میشود.
یک تفاوت عمده مشاهدات نقشه برداری زمین برای سایر زمینه ها این واقعیت است که نمایش فضایی ویژگی مورد علاقه یک موجود نقطه ای نیست، بلکه یک بردار مشاهده سه بعدی است. حتی اگر اندازهگیریها برای تعریف بعدی بعد فضایی استفاده میشوند، موقعیت دقیق ویژگی در زمان مشاهده در دسترس نیست. با توجه به این نکته، فرآیند رندر داده ها مستقیم نیست، اما نیاز به تزریق لایه پردازشی اضافی بین سرویس SOS پایگاه داده و خدمات تجسم WMS دارد.
مطالعه موردی نشان داد که چگونه میتوان دادههای مشاهداتی با حجم بالا و دنیای واقعی را با پیادهسازی مدل توسعهیافته در یک پلتفرم SOS مدیریت کرد (البته لازم به ذکر است که با بزرگ شدن پایگاه داده و SOS 52 درجه شمالی، مشکلات عملکرد سرعت مورد توجه قرار گرفته است. پاسخ پلت فرم کند شد). لایه پردازش اطلاعات موقعیتیابی را مدیریت میکند و سرویس تجسم WMS نشانداده شده، نماهای مشاهده خام را ارائه میکند که جنبههای کیفیت و بهرهوری را برجسته میکند (به عنوان مثال، پوشش، همپوشانی) در یک رویکرد گرافیکی جدید (رمان در زمینه خاص تصویربرداری مشاهده نقشهبرداری زمین).
علم اطلاعات تکامل مییابد و هر ذره از دادههای زمینسنجی جمعآوریشده بهدست میآید، اما به روش ساختاری منسجم ذخیره نمیشود، ثابت میکند که از دست دادن منفعت بالقوه در جنبههای دقت، هزینه یادآوری و روشهای جدید استفاده از داده است. با در نظر گرفتن موارد فوق، همراه با این واقعیت که GIS مبتنی بر اندازهگیری با توجه به مدلسازی ساختاریافته مشاهدات خام واقعاً امکانپذیر خواهد بود، کار فعلی مسیری در حال تکامل برای مدیریت اطلاعات نقشهبرداری زمین پیشنهاد میکند، یک طرح جدید دسترسی-استفاده از داده را نشان میدهد و چارچوب را تعیین میکند. برای توسعه بیشتر روشهای جدید برای اعمال بر روی مجموعه دادههای جمعآوریشده زمانی و چند کاربره.














بدون نظر