1. معرفی
در بلایای انسانی یا طبیعی زیست محیطی، تشخیص سریع فاجعه و زمان کوتاه رسیدن نیروهای اورژانس، عناصر کلیدی هستند که می توانند بین فاجعه کوچک مقیاس و حادثه تلفات جمعی تفاوت ایجاد کنند. دانستن در زمان واقعی اجزای فیزیکی حیاتی که بر گسترش و گستردگی فاجعه تأثیر می گذارد، سازمان های اورژانس را قادر می سازد تا سریعتر عمل کرده و آمادگی بهتری داشته باشند و از تعداد تلفات بدنی و آسیب های مالی کاسته شود. برای ارائه هشدار خطر، در کنار اطلاعاتی در مورد شرایط محیطی که همچنان بر فاجعه تأثیر می گذارد، حسگرهای فیزیکی به عنوان بخشی از شبکه حسگر محیطی (ESN) مستقر می شوند. ESN ها، مستقر در مناطق بزرگ، شامل دستگاههای حاوی حسگرهایی برای جمعآوری دادههای فیزیکی از محیط اطراف با ظرفیت انتقال آنها است. اگرچه ESN ها در ارائه هشدار خطر کارآمد هستند، تجربه گذشته از بلایای بزرگ نشان می دهد که استقرار سنسورهای فیزیکی ثابت معمولی اغلب کافی نیست، و بنابراین ممکن است داده های کافی مورد نیاز را برای ارزیابی موقعیت و تصمیم گیری فراهم نکند – عمدتا به دلیل پوشش محدود و کم سطح استقرار [1 ]. یک راه حل برای مشکل پوشش شبکه ژئوسنسور ناکافی می تواند تکیه بر داده های تولید شده توسط کاربر جمع سپاری، به عنوان مثال، استفاده از اطلاعات جغرافیایی داوطلبانه (VGI)، به عنوان یک منبع داده مکمل برای وظیفه تراکم داده های آب و هوا، یا به عبارت کلی تر، افزایش را پیشنهاد کند. استقرار ESN موجود
جمعسپاری دادههای جغرافیایی تولید شده توسط کاربر، فرآیند جمعآوری و اشتراکگذاری دادهها و اطلاعات مکانی و جغرافیایی است که از افراد، شهروندان و جوامعی که داوطلبانه در یک کار خاص شرکت میکنند، سرچشمه میگیرد ([2 ، 3 ]]). استفاده از دادههای حسی از طریق پارادایمهای کاری VGI روشی مؤثر برای جمعآوری دادهها است که میتواند برای گسترش تنوع منابع داده، و افزایش وضوح فضایی قرائتها و گزارشهای حسگر مورد استفاده قرار گیرد. بنابراین، دستگاههای قابل حمل مدرن، مانند گوشیهای هوشمند و تبلتها، که امروزه به آشکارسازهای حسگر مدرن و برنامههای کاربردی (برنامهها) مجهز هستند، پتانسیل ارائه شکاف دانش مرتبط با ESN را دارند. بنابراین، ایجاد ظرفیت افزایش و غنی سازی اطلاعات، به ویژه زمانی که ماهیت اطلاعات جغرافیایی پویا باشد. از آنجایی که انگیزه شهروندان برای مشارکت و مشارکت، همراه با فناوری پیشرفته و قابلیتهای ارتباطی به رشد خود ادامه میدهد، استفاده از دادههای آب و هوای تولید شده توسط کاربر برای فرآیندهای محیطی عملی و سودمند است.
این مقاله به بررسی استفاده از دادههای آب و هوایی تولید شده توسط کاربر، یعنی دمای محیط و رطوبت نسبی، برای افزایش و متراکمسازی ESN میپردازد. انگیزه تسهیل یک منبع جدید از داده های حسی واقعی و دقیق است که با راه حل های عملی برای غلبه بر محدودیت های فیزیکی مرتبط با ESN ها کمک می کند. دو فرآیند اصلی زمینآماری در اینجا به کار گرفته میشوند که از مسائل مربوط به جمعآوری، ترکیب و انتشار دادههای جمعسپاری تولید شده توسط کاربر ناشی میشوند: (1) تعیین دقت، قابلیت اطمینان و ویژگیهای آماری تکمیلی دادههای آبوهوای ارائهشده. این با انجام تجزیه و تحلیل آماری روی مشاهدات در رابطه با داده های مرجع معتبر خارجی به دست می آید. این امر با توسعه الگوریتمهای بلادرنگ برای شناسایی دادههای تثبیتشده بدون سوگیری همراه است، بنابراین نیاز به استفاده از منابع داده خارجی برای اعتبارسنجی دادهها در سناریوهای بلادرنگ را از بین میبرد. و (2) توسعه یک روش تراکم مشاهدات ESN با داده های آب و هوایی تولید شده توسط کاربر، و به دنبال آن یک ارزیابی کمی زمین آماری از سهم کلی محیطی.
ایده این است که کشورهای قابل توجهی مانند ایالات متحده، با داشتن میانگین مساحت تقریباً 3500 کیلومتر مربع در هر ایستگاه هواشناسی ([ 4 ])، یا کانادا، با تقریباً 10000 کیلومتر مربع در هر ایستگاه هواشناسی، می توانند سود زیادی ببرند. برای نشان دادن روش شناسی خود، نتایج تجربی را در رابطه با پارامترهای آب و هوای آتش سوزی که برای شبیه سازی و ارزیابی شبکه آب و هوای ژئوسنسور اسرائیل استفاده می شود، ارزیابی و اعتبار سنجی خواهیم کرد. ارائه روششناسی و نتایج تجربی ما انجام میشود که اثربخشی الگوریتمهای توسعهیافته و پیادهسازی شده و پتانسیل فرآیند افزایش و تراکم پیشنهادی را اثبات میکند.
2. تحقیقات مرتبط
به طور گسترده ای پذیرفته شده است که داده های مکانی در زمان واقعی بهترین منبع هشدار اولیه اطلاعات در مورد مدیریت خسارت و بلایا را ارائه می دهند ([ 5 ]). مطالعات اخیر قبلاً ثابت کرده است که مردم در به اشتراک گذاری و جمع آوری اطلاعات با یکدیگر همکاری می کنند (به عنوان مثال، [ 6 ، 7 ])، در حالی که در موارد اضطراری و بلایا، انگیزه عمومی برای جمع آوری داده ها حتی بیشتر است (به عنوان مثال، [ 8 ، 9]]). اجرای طرحهای کاری جمعسپاری، با پشتیبانی از حسگرهای فیزیکی مدرن و قابل اعتماد که توسط شهروندان حمل میشوند، دادههای تولید شده توسط کاربر را قادر میسازد تا وابستگی به متخصصان را کاهش دهد و در عین حال از این واقعیت استفاده کند که دادهها را میتوان از طریق منابع مختلف جمعآوری یا تولید کرد. سهم VGI برای موقعیتهای فاجعه به طور خاص تا حدی در برنامههای مختلف اجرا میشود (به عنوان مثال، [ 10 ، 11 ])، جایی که دومی نشان داد که 26٪ از این برنامهها به مدیریت بلایای آتشسوزی مربوط میشوند.
امروزه داده ها و اطلاعات آب و هوا و اندازه شناسی را می توان از منابع مختلف غیرمعتبر که از شهروندان و جوامع سرچشمه می گیرد به دست آورد (به عنوان مثال، [ 12 ، 13 ]). جمعآوری این دادهها از طریق استفاده از تکنیکهای جمعسپاری نقش حیاتی در جمعآوری و ارزیابی دادههای قابل اعتماد در زمان واقعی، به ویژه در مناطق پرجمعیت یا مناطقی که شبکههای هواشناسی پراکنده دارند، ایفا میکند ([14] ) . از آنجایی که پیشبینیها بیان میکنند که انتظار میرود رویدادهای شدید آب و هوایی در فرکانس، مدت و بزرگی افزایش یابد (به عنوان مثال، [ 15 ، 16]])، مشاهدات متراکم، با وضوح بالا و زمان واقعی به طور فزاینده ای برای مشاهده شرایط اندازه شناسی و پدیده های آب و هوایی مورد نیاز برای تشخیص و ارزیابی فوری مورد نیاز خواهند بود.
نمونههای مختلفی که از جمعسپاری عمومی برای جمعآوری دادههای آب و هوا (علم شهروندی) استفاده میکنند، وجود دارد. برای مثال، شبکه اشتراکی باران، تگرگ و برف (CoCoRaHS) به شبکهای از داوطلبان متکی است که بارش را اندازهگیری و نقشهبرداری میکنند تا دادههایی را برای تحقیقات، منابع طبیعی و برنامههای آموزشی فراهم کنند (به عنوان مثال، [17، 18 ] ) . پروژه “شناسایی بارش در نزدیکی زمین” (PING) که توسط اداره ملی اقیانوسی و جوی (NOAA) نگهداری می شود، نمونه دیگری است که در آن داوطلبان گزارش هایی را در مورد نوع بارشی که در زمان واقعی رخ می دهد، صادر می کنند ([19 ]]). با این حال، در اکثر این پروژهها، جمعسپاری عمومی شامل استفاده از حسگرهای کمهزینه و آماتوری است که توسط شهروندان مستقر و مدیریت میشوند، و نه استفاده غیرفعال و فعال از دستگاههای تلفن همراه مجهز به حسگر. از آنجایی که امروزه تعداد حسگرهای تعبیه شده در دستگاههای تلفن همراه در حال افزایش است، دادههای جمعآوریشده میتوانند به عنوان ورودی برای برنامهها و سرویسهای مختلف، به عنوان مثال OpenSignal و PressureNet (به عنوان مثال، [20، 21، 22 ] ) جمعسپاری شوند . با این حال، متغیرهای فیزیکی آب و هوا می توانند در فواصل کوچک و با تغییر توپوگرافی متفاوت باشند، به طوری که قابلیت اطمینان این حسگرها در گرفتن دقیق شرایط محیطی هنوز در حال بررسی است.
با توجه به [ 23 ]، تراکم شبکه ژئوسنسور ایستا را می توان با دو روش به دست آورد: (1) با استفاده از دستگاه های سخت افزاری، در نتیجه استقرار سنسورهای بیشتر (تراکم “سخت”). یا (2) استفاده از راه حل های نرم افزاری بدون سخت افزار اضافی (تراکم “نرم”). می توان تراکم یک ESN را به عنوان تراکم یک شبکه کنترل ژئودتیکی با استفاده از روش های مختلف آماری در نظر گرفت ([ 24 ]). همانطور که در مورد روش های ترکیب داده های چند سنسوری، این روش ها از آمار مشتق شده اند و روش های احتمالی هستند ([ 25]])، مانند همجوشی بیزی، فیلتر کالمن گسترده و بدون عطر، مبتنی بر شبکه، و مبتنی بر مونت کارلو. نقطه ضعف اصلی همجوشی مبتنی بر روشهای احتمالی، ناتوانی در ارزیابی شرایط ناشناخته است، از این رو برای مدیریت بلایا و موقعیتهای ارزیابی مناسبتر است، که میتواند با ناهنجاریهای شرایط محیطی مشخص شود.
ادغام و متراکم کردن دادهها از ژئوسنسورهای فیزیکی با دادههای جمعآوریشده با استفاده از جمعسپاری یک برداشت نوآورانه است (به عنوان مثال، [ 25 ، 26 ]). تحقیقات مرتبط در این زمینه عمدتاً بر بهبود پوشش ژئوسنسورهای فیزیکی – بدون استفاده از دادههای جمعسپاری متمرکز است. مشکل ادغام دادههای حسگرهای فیزیکی ثابت با حسگرهای انسانی (تولید شده توسط کاربر) برای کار بهبود کیفیت داده (به منظور بهبود تصمیمگیری) به عنوان مشکل همجوشی دادهها و پردازش (SDFP) نامیده میشود [1] .]. نویسندگان یک سیستم پشتیبانی جمع سپاری را برای نظارت بر بلایا ایجاد کردند، و روش ترکیب تصمیم متمرکز (CDF) را برای پلت فرم، بر اساس تشخیص تصادفی و تئوری تخمین بیان شده در قالب آزمونهای فرضیه دودویی، با استفاده از ترکیب ارزش و ترکیب تصمیم، پیشنهاد کردند. مثال دیگر Social Fusion ([ 27 ])، پلت فرمی برای ترکیب داده ها از منابع و انواع مختلف (به عنوان مثال، حسگرهای داده تلفن همراه، شبکه های اجتماعی و حسگرهای شبکه های ثابت)، با هدف ایجاد برنامه های کاربردی آگاه از زمینه است. ترکیب با استفاده از مجموعهای از طبقهبندیکنندهها برای استخراج استنتاجهای متنی معنادار از دادهها، در حالی که مکانیسم جمعآوری دادهها را از مرحله طبقهبندی تقسیم میکند، انجام میشود.
3. روش شناسی
3.1. معرفی
از آنجایی که دادههای آب و هوا عامل مهمی برای سیستمهای مختلف مدیریت بلایای طبیعی و طبیعی است، پارامترهای آب و هوای آتشسوزی به عنوان مطالعه موردی انتخاب میشوند. آب و هوای آتش سوزی داده های هواشناسی است که بر آتش سوزی های زمین وحشی تأثیر می گذارد ([ 28 ]). دو مورد از پارامترهای اصلی آب و هوای آتش سوزی عبارتند از: دمای محیط (AT) و رطوبت نسبی (RH) ([ 29 ]). سیستمهای رتبهبندی خطر آتشسوزی رایجترین سیستمهای رتبهبندی خطر آتشسوزی جنگلهای کانادا (CFFDRS) و سیستم رتبهبندی خطر آتشسوزی ملی (NFDRS) هستند که در ایالات متحده استفاده میشوند. الزامات ورودی هر دو سیستم برای AT و RH در جدول 1 نشان داده شده است .
3.2. داده های جمع آوری شده
دادههای آبوهوای جمعآوریشده در آزمایشهای صحرایی، AT و RH هستند، همراه با دادههای کمکی، شرایط محیطی موجود در طول اندازهگیریها را توصیف میکنند، در حالی که برخی ممکن است بر دستگاه جمعآوری و در نتیجه قابلیت اطمینان و دقت دادههای آب و هوای حسی جمعآوریشده تأثیر بگذارند. داده های کمکی عبارتند از: (1) روشنایی، که ممکن است داده های آب و هوا را به دلیل تابش خورشید که سکوی جمع آوری (دستگاه) را گرم می کند، سوگیری کند. (2) نزدیکی، تشخیص اختلالات بیرونی احتمالی در فاصله نزدیک. (3) ویژگیهای باتری، که ممکن است بر خوانشهای حسگر تأثیر بگذارد و به درک استفاده فعلی از دستگاه جمعآوری کمک کند. و (4) GPS، به دست آوردن موقعیت جغرافیایی اندازه گیری.
3.3. پلتفرم جمع آوری داده ها
با توجه به استفاده از روش جمعآوری دادههای تولید شده توسط کاربر جمعسپاری، که متکی بر افراد ناهمگن تصادفی واقع در نزدیکی منطقه مورد علاقه است، لازم است از یک دستگاه قابل حمل که توانایی جمعآوری آب و هوا و دادههای کمکی فوقالذکر را داشته باشد و با آن ارتباط برقرار کند (از طریق اینترنت) به یک سیستم مرکزی. پلتفرمهای رایجتر و گستردهتر جمعآوری دادهها، احتمال مشارکت شهروندان در جمعآوری دادهها، افزایش حجم دادهها و احتمالاً دقت، تراکم و قابلیت اطمینان کلی شبکه را افزایش میدهند. بررسی بازار نشان داد که Samsung Galaxy S4 (SG4) مدل GT-I9500، حاوی تمام سنسورهای لازم برای ارائه داده های فوق، به طور گسترده توسط شهروندان استفاده می شود و سهم بازار سامسونگ 25٪ است ([ 32]). SG4 شامل GPS، موقعیت یابی ژئومغناطیسی، و همچنین ژیرومتر، شتاب سنج، فشارسنج، دماسنج، رطوبت سنج، حسگر نور RGB، حسگر ژست، حسگر مجاورت و میکروفون است ([33] ) .
سنسور AT و RH تعبیه شده در دستگاه SG4 SHTC1 است که توسط “Sensirion” ساخته شده و در یک محیط کنترل شده کالیبره شده است. دقت رسمی سنسور در جدول 2 نشان داده شده است ، که در مقایسه با الزامات NFDRS و CFFDRS ( جدول 1 )، از نظر تئوری قابل قبول و در محدوده مناسب است. از نظر تئوری، در شرایط عادی، حسگر SHTC1 پتانسیل ارائه با قرائت های قابل اعتماد را دارد که هدف مطالعه ما را برآورده می کند ([ 34 ]).
3.4. برنامه جمع آوری داده ها
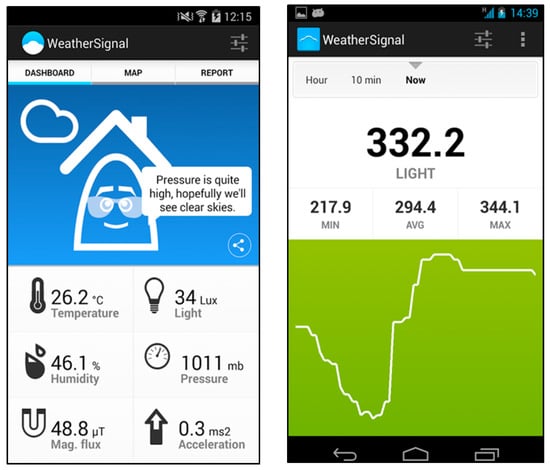
با بررسی برنامههای موجود مناسب برای پلتفرم جمعآوری دادههای آبوهوا (سیستم عامل اندروید)، برنامهای که نیازهای ما (تنوع پارامترهای ثبتشده، اتوماسیون، سادگی رابط کاربری) را برآورده میکند، WeatherSignal بود که در شکل 1 نشان داده شده است . این برنامه یک نقشه آب و هوا مبتنی بر جمع سپاری ایجاد می کند، که در آن کاربران می توانند انواع داده های آب و هوا را از حسگرهای تعبیه شده در دستگاه های تلفن همراه خود جمع آوری کنند.
3.5. داده های مرجع
داده های ایستگاه های هواشناسی ایستگاه هواشناسی اسرائیل (IMS) به عنوان مرجع استفاده می شود که با استانداردهای سازمان جهانی هواشناسی (WMO) مطابقت دارد ([ 36 ]). جدول 3 دقت حسگرهای AT و RH مورد استفاده در ایستگاه های هواشناسی IMS را نشان می دهد. از مارس 2016، 84 ایستگاه بدون سرنشین برای منطقه اسرائیل وجود دارد، در حالی که دادهها و ابردادههای جمعآوریشده در دسترس عموم هستند ( www.data.gov.il ).
3.6. مجموعه داده های میدانی
هدف سناریوهای جمعآوری دادهها، ارائه درک تحلیلی و آماری از دادههای آبوهوای جمعآوریشده از نظر دقت و قابلیت اطمینان است که برای توسعه روشها و الگوریتمهای بهینه و قوی جمعآوری و پردازش لازم است. این کار با جمع آوری داده های آب و هوا و کمکی تولید شده توسط کاربر در سه سناریو مختلف انجام می شود.
3.6.1. سناریو 1: اندازه گیری طولانی مدت
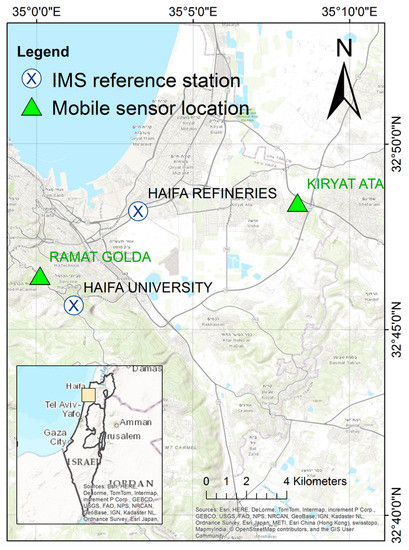
هدف این سناریو بررسی دقت اندازهگیریها در شرایط غیرآزمایشگاهی نسبت به دقت سازنده رسمی است ( جدول 2 ). داده ها به طور مداوم برای مدت زمان طولانی (12 ساعت) جمع آوری شد، در حالی که SG4 به صورت ایستا در یک مکان سایه دار (که به عنوان یک کلبه هواشناسی عمل می کند) قرار گرفت تا گرمایش را از قرار گرفتن در معرض نور مستقیم خورشید حذف کند. SG4 در نزدیکی یک ایستگاه IMS (پالایشگاه هایفا، شمال اسرائیل) برای مقایسه اندازهگیریها قرار داشت که در شکل 2 نشان داده شده است.. نرخ نمونه برداری از اندازه گیری ها هر 10 ثانیه بود. از آنجایی که دقت داده ها در رابطه با IMS تعیین می شود، که در آن اندازه گیری ها برای هر 10 دقیقه میانگین می شود، داده های جمع آوری شده به طور مشابه میانگین گیری شدند. اگرچه فاصله بین مکان ها چندین کیلومتر است، اما فرض بر این است که مقادیر اندازه گیری باید مشابه باشند، عمدتا برای چنین مدت زمان طولانی و میانگین اندازه گیری ها.
3.6.2. سناریو 2: اندازه گیری های کوتاه مدت
هدف این سناریو تقلید از فرآیند جمعسپاری واقعی است. فرآیند جمعآوری به دلیل حجم نمونه کوچک امکان شناسایی و حذف موارد پرت را ندارد، بنابراین پس پردازش عملی نیست. این سناریو از چهار جلسه اندازه گیری مختلف تشکیل شده است که هر جلسه با زمان های اندازه گیری متفاوت مشخص می شود و شرایط محیطی مختلف را در طول روز پوشش می دهد: 01:00-02:00، 08:00-09:00، 13:00-14:00 و 19. :00-20:00. اندازه گیری ها در نزدیکی دو ایستگاه مرجع IMS (پالایشگاه های حیفا و دانشگاه حیفا، نشان داده شده در شکل 2 ) انجام شد .
3.6.3. سناریو 3: شرایط محیطی تأثیر می گذارد
قرائتهای SG4 ممکن است تحت تأثیر شرایط محیطی قرار بگیرند، عمدتاً قرار گرفتن در معرض نور مستقیم خورشید، که بر خوانشهای سنسور تأثیر میگذارد و سوگیری میکند. هدف در اینجا توسعه یک الگوریتم است که بتواند به طور خودکار تشخیص دهد و نشان دهد که چه زمانی اندازهگیریها قابل اعتماد هستند (بدون سوگیری توسط تأثیرات خارجی). این با استفاده از سناریوهای اندازهگیری مختلف به دست میآید، که در آن SG4 در معرض نور مستقیم خورشید، قرائتهای بایاس قرار گرفته و به مکانی سایهدار منتقل میشود. دادههای خام جمعآوریشده در طول این سناریو برای یافتن شاخصها مورد تجزیه و تحلیل قرار میگیرند، که در الگوریتمی استفاده میشود که هدف آن شناسایی زمانی است که قرائتهای حسگر موبایل تثبیت شدهاند، و بنابراین میتوانند در زمان واقعی مورد استفاده قرار گیرند.
3.7. تحلیل داده ها
تجزیه و تحلیل داده ها با هدف تعیین ویژگی های آماری داده های جمع آوری شده است. دقت داده ها با استفاده از RMSE (ریشه میانگین مربعات خطا)، که در معادله (1) نشان داده شده است، محاسبه می شود. این شبیه به ارزیابی دقت بین مجموعههای داده در کاربردهای زمینآماری است: با استفاده از مقادیر دادههای آبوهوای تولید شده توسط کاربر اندازهگیری شده ( L )، و مقادیر مرجع اندازهگیری شده توسط ایستگاههای رسمی IMS (µ). اگر پارامتر تخمین زده شده با استفاده از RMSE بدون سوگیری باشد، آنگاه مقدار RMSE برابر با مقدار انحراف استاندارد (SD) است.
برای تعیین کمیت عدم قطعیت یک تخمین نقطه ای خاص، در این مورد عدم قطعیت میانگین باقیمانده، یک فاصله اطمینان حول تخمین نقطه ای محاسبه می شود. اگر توزیع داده ها نرمال نباشد، فاصله اطمینانی که بر اساس مقدار میانگین است، ممکن است دقیق نباشد. اگر باقیمانده ها به طور معمول توزیع شوند، مقدار RMSE در مقداری ضرب می شود که نشان دهنده خطای ضریب احتمال توزیع نرمال استاندارد از میانگین در سطح اطمینان 95٪، Z = 1.96 است. بنابراین، فاصله اطمینان از میانگین برآوردگر/نمونه به دست می آید ایکس¯¯¯�¯مانند ( ایکس¯¯¯– ز* آر اماسE، ایکس¯¯¯+ Z* آر اماسE)�¯−�*����, �¯+�*����)(به عنوان مثال، [ 38 ]). حذف پرت با استفاده از روش IQR (محدوده بین ربعی) انجام می شود ([ 39 ])، در حالی که داده های پذیرفته شده در بازه زمانی (چرک اول – 1.5 IQR، چارک سوم + 1.5 IQR) در نظر گرفته می شوند. به این ترتیب، نقاط پرت را می توان برای بهبود دقت نتایج شناسایی و فیلتر کرد.
برای ارزیابی توزیع نرمال (مواد باقیمانده)، آزمون فرضیه صفر نرمال بودن Shapiro-Wilk W مطابق با معادله (2) اجرا میشود ([ 40 ، 41 ]). x ( i ) آمار مرتبه i است ،ایکس¯�¯میانگین نمونه است، و a i ثابتهایی هستند که از مقادیر مورد انتظار آمار نظم نمونهبرداری شده از توزیع نرمال استاندارد و ماتریس کوواریانس به دست میآیند. در صورتی که پارامتر معناداری کمتر از سطح آلفای انتخابی باشد (به عنوان مثال 0.05 برای 5%)، فرضیه صفر رد می شود، به این معنی که داده ها به طور معمول توزیع نمی شوند. مزیت این آزمون این است که نتیجه آن عینی است، یعنی توسط ناظر تفسیر نمی شود (شاید ذهنی).
از آنجایی که هر دو اندازه گیری AT و RH ممکن است همبستگی قوی داشته باشند، آزمون همبستگی پیرسون ([ 42 ]) طبق رابطه (3) انجام شد. این کار برای شناسایی سوگیری بودن قرائت سنسور انجام می شود. r�ضریب همبستگی پیرسون است، ایکس¯¯¯�¯و Y¯¯¯�¯میانگین نمونه مجموعه داده های اول و دوم هستند و ایکسمن��و Yمن��مقدار i مجموعه داده اول و دوم هستند.
3.8. اعتبار سنجی داده ها
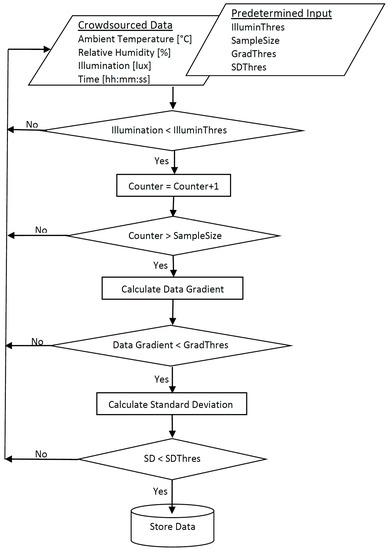
اعتبار سنجی داده ها با هدف توسعه یک الگوریتم برای نشان دادن اینکه آیا داده های جمع آوری شده توسط کاربر برای استفاده قابل اعتماد هستند یا خیر. داده های اندازه گیری شده در سناریوی 3 استفاده می شود. الگوریتم فقط بر اساس داده های جمع آوری شده است و بر هیچ داده خارجی (مرجع) تکیه نمی کند. نتایج بعداً با داده های مرجع IMS برای تجزیه و تحلیل آماری و تأیید مقایسه می شوند. این الگوریتم از شاخص های داده (آستانه) استفاده می کند که نقطه تثبیت را طبقه بندی می کند: شناسایی، در زمان واقعی، زمانی که داده های آب و هوای جمع آوری شده قابل استفاده هستند. از آنجایی که زمان های کالیبراسیون حسگرها (که برای به دست آوردن نتایج قابل اطمینان لازم است) ثابت نیستند و نمی توان آنها را از پیش تعیین کرد، مجموعه ای از چهار پارامتر را طبقه بندی کرده ایم که به صورت پویا (در زمان واقعی) در طول اندازه گیری ها محاسبه می شوند: (1) مقدار گرادیان. (2) مقدار SD; (3) تعداد مشاهدات. و (4) خواندن اشراق. این پارامترها از آنجایی انتخاب می شوند که در صورت ترکیب به عنوان شاخص های قابل اعتماد برای تثبیت و تداوم اندازه گیری داده ها عمل می کنند. گردش کار الگوریتم تثبیت در به تصویر کشیده شده استشکل 3 .
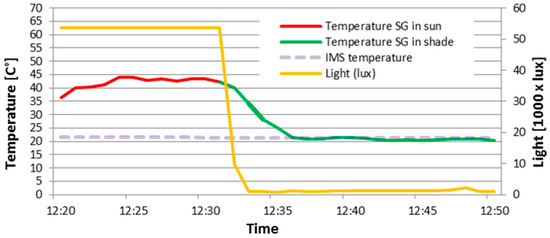
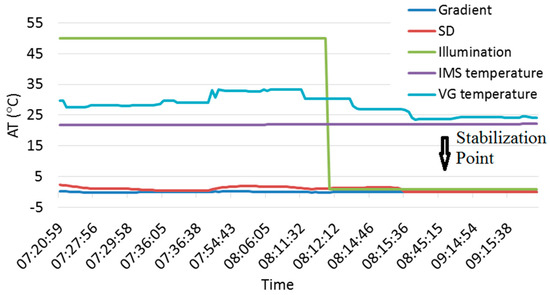
شکل 4 تغییر قرائت AT را به دلیل قرار گرفتن در معرض نور مستقیم خورشید (55000 لوکس) نشان می دهد. هنگامی که دستگاه جمع آوری به سایه منتقل شد، حسگر نور فقط چند صد لوکس را اندازه گیری کرد. تنها چند دقیقه بعد AT به 21 درجه سانتیگراد تثبیت می شود، مشابه داده های مرجع IMS (خوانش های RH اثر مشابهی دارند). این نشان می دهد که اگرچه مقدار روشنایی نشانه خوبی است، تنها ترکیبی از چهار پارامتر ذکر شده در بالا می تواند ثبات داده را تعیین کند. چهار پارامتر، که در جدول 4 نشان داده شده اند ، به صورت تجربی بر اساس یک فرآیند بهینه سازی با استفاده از پنج جلسه مشاهده در سناریوی 3 محاسبه شدند.
3.9. تراکم شبکه
با بررسی پتانسیل استفاده از دادههای آب و هوای تولید شده توسط کاربر در مقیاس بزرگتر، از دادههای آب و هوا از نقشه آبوهوای جمعسپاری WeatherSignal ( www.weathersignal.com ) استفاده میکنیم. WeatherSignal از حسگرهای تعبیهشده تلفن همراه برای اندازهگیری شرایط جوی محلی استفاده میکند که سپس بر روی نقشه آب و هوای آنلاین آنها نمایش داده میشود. WeatherSignal توسط صدها هزار کاربر در سراسر جهان استفاده می شود و میلیون ها داده اندازه گیری آب و هوا تولید شده توسط کاربر را ذخیره می کند. به طوری که با استفاده از داده های ذخیره شده در پایگاه داده WeatherSignal، عملاً از داده های افرادی استفاده می کنیم که به طور فعال مشارکت می کنند و به طور مداوم داده های آب و هوا را جمع آوری می کنند.
دادههای خام دانلود شده دارای میلیونها ورودی داده هستند، بنابراین فیلتر کردن دادهها برای حذف قرائتهای نامربوط یا اشتباه ضروری است. برای این، یک الگوریتم توسعه داده شده است که در ArcMap با استفاده از سازنده مدل، که در شکل 5 نشان داده شده است، پیاده سازی شده است . این الگوریتم از جستارهای مختلف اجرا شده در پایتون، که در جدول 5 نشان داده شده است، تشکیل شده است: مرزهای مکانی محیط مطلوب، دقت مکان کافی، و آستانه های داده های حسی کمکی. هدف الگوریتم فیلتر تشخیص اینکه آیا خوانشها در داخل یا خارج از خانه توسط مجموعهای از جستارهای تکمیلی گرفته شدهاند، و همچنین خوانشهای نامربوط یا اشتباه را فیلتر میکند. AT داخلی ممکن است متفاوت از AT در فضای باز باشد، به طوری که فیلتر کردن مشاهدات داخلی مهم است. این توسط سه پرس و جو انجام شد (نگاه کنید بهجدول 5 : (الف) دستگاه جمع آوری به یک دستگاه خارجی (از جمله پاور بانک های قابل حمل) وصل شده است. (ب) دستگاه در حال شارژ شدن است. و (ج) دستگاه به سرعت حرکت می کند، به عنوان مثال، در یک ماشین. به عنوان مثال، در مجموعه داده ما، تقریباً 30٪ از همه خواندن ها بر اساس استفاده از این پرس و جوها و آستانه ها فیلتر شدند. روش دیگر، استفاده از تطبیق نقشه موقعیت دستگاههای مجموعه با لایههای GIS (به عنوان مثال، ساختمانها، مرزهای شهر و جادهها) یا مدلهای سطح دیجیتال منطقه ممکن است مفید باشد. با این حال، دقت دستگاه ها ممکن است ضعیف باشد (سیگنال GPS بد، چند مسیر در مناطق ساخته شده یا موقعیت مبتنی بر شبکه تلفن همراه)، به طوری که تطبیق ممکن است نتایج اشتباهی ایجاد کند، یا مناطق شهری ممکن است به طور کامل فیلتر شوند. برای حل این مشکل، مجموعهای از آزمونهای فرضیههای آماری تکمیلی را اعمال کردهایم (به بخش 3.10 مراجعه کنید.) برای شناسایی و حذف خطاهای داده و موارد پرت که ممکن است از خوانش های داخل ساختمان ایجاد شود.
3.10. تجزیه و تحلیل جغرافیایی آماری
دو آزمون فرضیه زمینآماری بر روی دادههای WeatherSignal پس از فیلتر انجام میشود، با هدف اثبات اینکه آیا میتوان آن را به عنوان بخشی جدایی ناپذیر از شبکه آب و هوای ژئوسنسور IMS در نظر گرفت. اول، یک آزمون فرضیه صفر همبستگی خودکار مکانی محلی، Anselin Local Moran’s I ([ 43 ])، که همبستگی فضایی همه قرائتها را در مجاورت آنها بررسی میکند. در صورتی که هیچ نقطه پرت شناسایی نشود، داده های WeatherSignal از نظر آماری به عنوان انتگرال شبکه IMS از نظر همبستگی در نظر گرفته می شوند. رد فرضیه صفر به این معنی است که تفاوتهای بین مقادیر تصادفی نیستند، بلکه از دادههای ناسازگار مشتق شدهاند. آمار I Anselin Local Moran ( منمنمنمن) در معادله (4) نشان داده شده است، جایی که ایکسمنایکسمنویژگی ویژگی i است (AT یا RH)، ایکس¯ایکس¯میانگین صفت مربوطه است و wمن ، ج�من،�وزن فضایی (فاصله) بین ویژگی i و j است .
دوم، یک آزمون فرضیه صفر همبستگی خودکار فضایی جهانی، Anselin Global Moran’s I ([ 44 ])، که همبستگی فضایی مکان ویژگی ها را با توجه به ارزش ویژگی خاص بررسی می کند. این آزمون سراسری است، به این معنی که الگوی فضایی کامل همه داده ها (خوشه ای، پراکنده یا تصادفی) را بررسی می کند. اگر فرضیه صفر رد شود، داده ها به طور تصادفی پخش نمی شوند، در حالی که اگر نتیجه به اندازه کافی قابل توجه باشد، می توان بیان کرد که داده ها خوشه ای هستند، به این معنی که داده های WeatherSignal بخشی جدایی ناپذیر از شبکه آب و هوای ژئوسنسور IMS هستند. آماره I Anselin Global Moran ( I ) در معادله (5) نشان داده شده است، جایی که zمن�منانحراف ویژگی i (AT و RH) از میانگین آن است، اس0اس0تجمیع وزن های فضایی است و wمن ، ج�من،�وزن فضایی (فاصله) بین ویژگی i و j است .
4. نتایج تجربی
4.1. سناریو 1
تعداد کل اندازهگیریها به 1600 انباشته میشود، که میانگین نرخ نمونهگیری تقریباً 30 ثانیه را بیان میکند، و تعداد کل 73 جلسه تجزیهوتحلیل شده را ایجاد میکند (اعداد با فاصله 10 ثانیهای برنامهریزیشده این آزمایش متفاوت است، زیرا برخی از دورهها وجود نداشتند یا اندازهگیریهای نامربوطی را نشان دادند).
4.1.1. نتایج دمای محیط
تفاوت میانگین AT بین اندازهگیریهای SG4 و IMS 1.2 درجه سانتیگراد، با SD 2 درجه سانتیگراد و RMSE 2.3 درجه سانتیگراد است. فاصله تخمینی میانگین با احتمال 95% 4.5 ± 1.2 درجه سانتیگراد است، با حداقل و حداکثر تفاوت به ترتیب 1.9- درجه سانتیگراد و 9.2 درجه سانتیگراد. نتایج ممکن است شامل خطاهای فاحشی باشد که بعدا بررسی خواهد شد. هفتاد و دو درصد از باقیمانده های محاسبه شده از مقدار اندازه گیری شده بالاتر از مقدار مرجع هستند، که نشان می دهد که SG4 تمایل دارد AT را بیش از حد تخمین بزند. این نیز مقادیر بالای باقیمانده مثبت را بر خلاف مقادیر باقیمانده منفی کوچک توضیح می دهد.
با توجه به حجم نسبتاً بزرگ نمونه (73 اندازه گیری)، فرض می شود که باقیمانده ها از یک توزیع نرمال به دست آمده اند. برای تأیید این امر، ترکیبی از تجزیه و تحلیل بصری با آزمون آماری انجام می شود. نتیجه آزمون Shapiro-Wilk در جدول 6 نشان داده شده است(بالا). سطح معنی داری 0.01 (<0.05) نشان می دهد که فرضیه صفر رد می شود. بنابراین، جمعیت به طور معمول توزیع نشده است. بررسی هیستوگرام و نمودار احتمال نرمال نشان داد که به جز چند اندازه گیری مشکوک، داده ها را می توان به طور معمول توزیع کرد، بنابراین نتیجه گیری در مورد توزیع داده ها مبهم است. بر این اساس، تشخیص نقاط پرت برای شناسایی مشاهدات با مقادیر اشتباه با استفاده از تصویرسازی باکس پلات که برای مقایسه توزیعها و شناسایی نقاط پرت مفید است، انجام میشود. Boxplot نسبت به مقادیر شدید داده ها حساسیت کمتری دارد زیرا از میانگین یا SD استفاده نمی کند بلکه از چارک ها استفاده نمی کند و به توزیع عادی محدود نمی شود ([ 40]]). در نتیجه، چندین قرائت به عنوان نقاط پرت در خارج از سبیل باکس پلات شناسایی می شوند. با حذف این قرائتهای پرت، AT دوباره تجزیه و تحلیل میشود، با نتایج نشاندهنده کاهش مقادیر آماری: فاصله تخمینی 95% 0.9 ± 3.2 درجه سانتیگراد، RMSE 1.6 درجه سانتیگراد و حداقل و حداکثر مقادیر اختلاف 1.9- و 3.9 است. درجه سانتیگراد به ترتیب اجرای مجدد آزمون نرمال بودن Shapiro-Wilk، که در جدول 6 (پایین) نشان داده شده است، این فرض را تأیید می کند که داده ها از یک جمعیت توزیع شده نرمال مشتق شده اند (Sig. 0.4 > 0.05 Alpha)، همچنین با تصویرسازی باکس پلات از داده ها تأیید شده است.
4.1.2. نتایج رطوبت نسبی
نتایج سناریوی 1 اندازه گیری RH یک تفاوت میانگین بین اندازه گیری SG4 و IMS مرجع 2-٪ با مقادیر SD و RMSE 8٪ ایجاد کرد. با فرض اینکه داده ها به طور معمول توزیع شده اند، فاصله تخمینی 95% 16±2% و به ترتیب مقادیر اختلاف حداقل و حداکثر 21% و 15% است. برخلاف AT، دادهها در اینجا به طور معمول توزیع میشوند، که توسط آزمون نرمال بودن Shapiro-Wilk (Sig. 0.1 > 0.05 آلفا)، نشاندادهشده در جدول 7 ، و همچنین تجسم نمودار جعبه، بدون دادههای پرت، اثبات شده است.
4.1.3. همبستگی بین رطوبت نسبی و دمای محیط
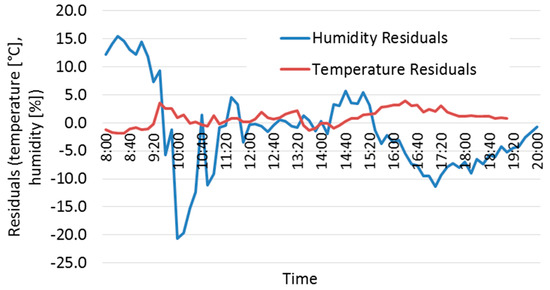
هنگامی که هر دو اندازه گیری SG4 AT و RH با داده های مرجع IMS مقایسه شدند، یک همبستگی قوی بین اندازه گیری ها وجود داشت: هر زمان که اندازه گیری AT بالاتر از مقدار مرجع (“درست”) باشد، اندازه گیری RH کمتر از مقدار مرجع است. شکل 6 هر دو مقدار باقیمانده را مقایسه می کند. نتایج آزمون همبستگی پیرسون در جدول 8 نشان داده شده است، نشان می دهد که وقتی باقیمانده های AT مثبت قوی هستند، باقیمانده های RH منفی قوی خواهند بود و بالعکس، ثابت می کند که یک همبستگی منفی قوی وجود دارد. به گونه ای که هرگاه پارامتری بایاس شود، بر پارامتر دیگر تأثیر می گذارد، به این معنی که سنسور بایاس است. این را می توان با چندین فرض توضیح داد، اصلی ترین آن این است که با توجه به این واقعیت که حسگر یکسان برای اندازه گیری AT و RH به طور همزمان استفاده می شود، بر تمام پارامترهای اندازه گیری شده تأثیر می گذارد (بایاس). فرض دیگر این است که شرایط محیطی موجود بر خوانش حسگرها تأثیر می گذارد، بنابراین آنها را برای هر دو پارامتر سوگیری می کند.
4.1.4. خلاصه و نتیجه گیری
تجزیه و تحلیل ها نشان می دهد که هر دو اندازه گیری AT و RH به طور معمول توزیع می شوند، اگرچه اختلاف بین مقادیر SHTC1 اعلام شده و مقادیر جلسات میدان واقعی نسبتاً بزرگ است. مقایسه الزامات دقت و نتایج دقت جلسات مختلف در جدول 9 ارائه شده است ، که نشان میدهد دادههای آب و هوای تولید شده توسط کاربر در محل هر دو الزامات CFFDRS و NFDRS هستند.
4.2. سناریو 2
مقایسه آمار سناریو 2 و سناریو 1 نشان داده شده در جدول 10، تا حدودی بهبود را نشان می دهد. به عنوان مثال، میانگین باقیمانده، RMSE، SD و حداکثر بازه باقیمانده اندازهگیریهای AT نزدیک به 50٪ کاهش یافت. توضیح احتمالی برای این موارد ممکن است به دلیل شرایط محیطی موجود در محیط اندازهگیری باشد، که باعث شد حسگر متحرک در سناریوی طولانی مدت 1 گرم شود و اندازهگیریها را سوگیری کند. در اندازهگیریهای کوتاه مدت (سناریوی 2)، به دلیل زمان جمعآوری کوتاه ، موقعیت خورشید مشابه باقی ماند ، بنابراین دستگاه جمع آوری در کل مرحله اندازه گیری سایه داشت. توضیح دیگر می تواند به دلیل دریفت شدن سنسور SHTC1 باشد، که اگرچه طبق داده های SHTC1 ناچیز در نظر گرفته می شود، اما بر اندازه گیری ها تأثیر می گذارد (به طور مشابه با دقت ارزیابی شده واقعی که بدتر از رسمی بود).جدول 9 ) به نظر می رسد که دقت AT تولید شده توسط کاربر شبیه به نیاز NFDRS است و نتیجه می گیرد که اندازه گیری ها می توانند به عنوان ورودی برای چنین کاربردهایی در نظر گرفته شوند. دقت RH تولید شده توسط کاربر به نیاز CFFDRS نزدیکتر است، همچنان در 2٪ از میزان مورد نیاز بایاس است. به طور کلی، نتایج آزمایشهای سناریو 1 و سناریو 2 ثابت میکند که روش پیشنهادی استفاده از دادههای آبوهوای تولید شده توسط کاربر برای تقویت شبکه ژئوسنسور آبوهوا، حتی زمانی که هیچ پسپردازش دادهای صورت نگرفته است، قابل بررسی است.
4.3. سناریو 3
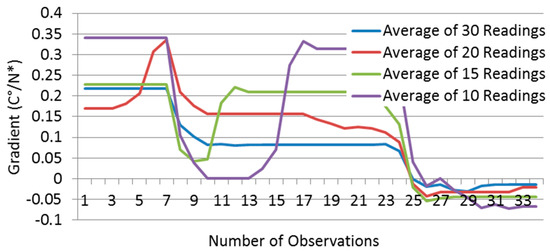
مجموعه ای از پنج جلسه انجام شد که در جدول 11 نشان داده شده است و به عنوان ورودی برای فرآیند تثبیت استفاده می شود. شکل 7پارامتر گرادیان اندازهگیریهای AT را نشان میدهد که برای تعداد قرائتهای مختلف محاسبه میشود تا تعداد قرائتهای لازم برای تشخیص واضح نقطه تثبیت را تعیین کند. می توان استنباط کرد که تنها پس از 30 خواندن تثبیت انجام می شود، گرادیان فیلتر بر روی مقادیر مشابه AT (مقدار گرادیان نزدیک به صفر) محاسبه می شود. بر این اساس، آستانه گرادیان کمتر از 0.05 انتخاب می شود. مقدار SD، که معیار کاهش است، میتواند پیشبینی کند که آیا اندازهگیریها پراکنده یا پایدار هستند، بنابراین زمانی که مقادیر اندازهگیری مشابه و بدون نوسان هستند، تثبیت به دست میآید. به طور مشابه، به گرادیان، 30 قرائت یک مقدار SD با روند داده خوب ارائه کردند.
مشخص شد که اگر روشنایی کمتر از 50000 لوکس باشد، به این معنی نیست که داده ها تثبیت شده اند، فقط دستگاه جمع آوری مستقیماً در معرض نور خورشید قرار نمی گیرد. تنها ترکیبی از آستانه چهار پارامتر می تواند ثبات داده را تعیین کند. چهار پارامتر تثبیت به صورت تجربی محاسبه شدند، در رابطه با پنج جلسه تجزیه و تحلیل شدند، در حالی که مقدار آستانه برای هر یک در جدول 4 تعریف شده است ، با گردش کار الگوریتم تثبیت که در شکل 3 نشان داده شده است .
مقایسه داده های IMS AT (مرجع) با قرائت های تولید شده توسط کاربر همراه با شاخص های الگوریتم تثبیت در شکل 8 نشان داده شده است . نقطه تثبیت به طور خودکار و درست تعیین می شود. شکل 8 اثر مقادیر لوکس را نشان میدهد و ثابت میکند که مدتی طول میکشد تا اندازهگیریها ثابت شوند و خوانشهای دقیق ایجاد شود. قرائت AT (و همچنین RH) از هر دو منبع داده پس از تعیین خودکار نقطه تثبیت (کالیبراسیون) مشابه است.
5. نمایش کاربردی
5.1. مجموعه داده های آب و هوا
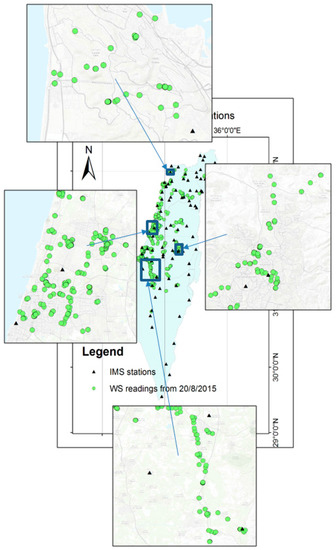
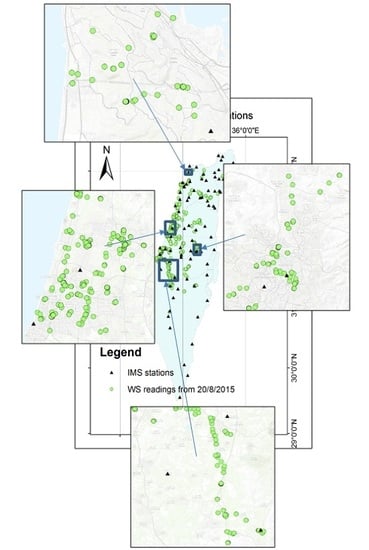
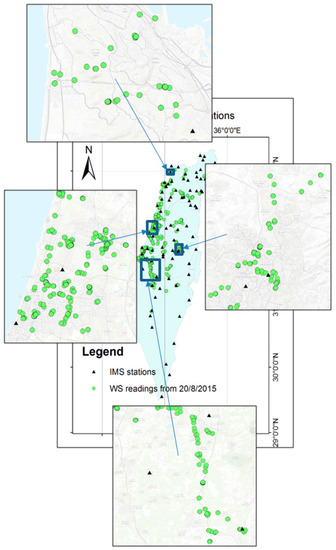
پتانسیل استفاده از داده های آب و هوای جمع سپاری شده با استفاده از نقشه آب و هوای جمع سپاری WeatherSignal نشان داده شده است. مشاهدات از پایگاه داده WeatherSignal برای دوره 1 ژوئن 2015 تا 22 اوت 2015 دانلود شد. بیش از دو میلیون رکورد بازیابی شد که تقریباً 24000 خواندن در روز و 1000 خواندن در ساعت را بیان می کند. در میان سایر موارد، هر خواندن (رکورد) شامل موارد زیر است: اندازه گیری مکان، AT، RH، روشنایی، سرعت، و اندازه گیری مجاورت. با استفاده از یک جستجوی فضایی ساده برای منطقه اسرائیل، در مجموع 7600 قرائت برای دوره 17 اوت 2015 تا 20 اوت 2015 بارگیری شد که تنها در 20 اوت 2015، 3755 قرائت انجام شد. شکل 9مناطقی را به تصویر میکشد که چگالی دادههای آبوهوای WeatherSignal تولید شده توسط کاربر به طور قابلتوجهی به تراکم ایستگاههای هواشناسی IMS موجود کمک میکند. واضح است که خوانشهای مبتنی بر جمعسپاری شکافها را در مناطقی که پوشش ندارند یا ایستگاههای هواشناسی پراکندهاند پر میکنند.
5.2. پیش پردازش داده های آب و هوای تولید شده توسط کاربر
فرآیند فیلتر، که در جدول 5 نشان داده شده است، بر روی داده های آب و هوای تولید شده توسط کاربر در 20 آگوست 2015 پیاده سازی شده است، که در آن موقعیت GPS نادرست (نزدیک به 1200 قرائت)، داده هایی که ناقص هستند، به عنوان مثال، AT، RH موجود نیست (327 قرائت)، یا نامربوط، به عنوان مثال، در داخل ساختمان (بیش از 1000 قرائت)، فیلتر شده و استفاده نمی شود، که منجر به 730 قرائت (از 3755 اولیه) می شود. از آنجایی که آب و هوا دائماً در حال تغییر است، ما بر یک دوره زمانی خاص تمرکز کردهایم که در آن فرآیند متراکمسازی اجرا میشود. دوره 10:00 تا 12:00 انتخاب شد که منجر به 57 خواندن شد.
5.3. تجزیه و تحلیل جغرافیایی آماری
5.3.1. خود همبستگی فضایی محلی
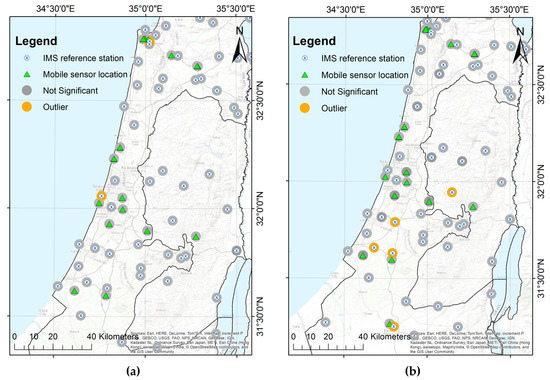
نتایج آزمون فرضیه برای دادههای RH نشان داد که سه نقطه پرت وجود دارد، به این معنی که اندازهگیریها با قرائتهای RH اطراف ناسازگار هستند. همه موارد پرت اندازه گیری IMS هستند و هیچ کدام توسط کاربر تولید نشده است. این نشان میدهد که آزمون فرضیه از لحاظ نظری تأیید میکند که دادههای RH تولید شده توسط کاربر دانلود شده از WeatherSignal را میتوان به عنوان بخشی از شبکه آب و هوای جامع در نظر گرفت. برای AT، این آزمایش پنج نقطه پرت را شناسایی کرد که همگی مقادیر قابل توجهی بالاتر از محیط اطرافشان داشتند، که باز هم از اندازهگیریهای IMS سرچشمه میگرفتند، بدون اینکه هیچ کدام توسط کاربر تولید شده باشد و نتیجهگیری یکسانی نداشته باشد. اگرچه نتایج نشان میدهد که تمام نقاط پرت اندازهگیری IMS هستند، باید بیان کرد که قرائتهای IMS قابل اعتمادتر در نظر گرفته میشوند. نقاط پرت می تواند به دلیل توپوگرافی منطقه ایجاد شود، که در اینجا تنها رابطه فضایی تعریف شده فاصله بود. علاوه بر این، تمام خوانشها (تولید شده توسط کاربر و IMS) بهطور یکسان در نظر گرفته شدند، زیرا هدف این بود که ثابت شود هر دو منبع داده مکمل یکدیگر هستند. بنابراین، این امکان وجود دارد که خوشههایی از خوانشهای هواشناسی تولید شده توسط کاربر مغرضانه باعث شوند که قرائتهای دقیق IMS به عنوان نقاط پرت شناسایی شوند. این موضوع در به تصویر کشیده شده استشکل 10 ، هر دو نتایج آزمون فرضیه را تجسم می کند، و نشان می دهد که در برخی موارد، نزدیک ترین قرائت ها به نقاط پرت IMS شناسایی شده، قرائت های تولید شده توسط کاربر خوشه ای هستند.
5.3.2. همبستگی خودکار فضایی جهانی
نتایج این آزمون فرضیه در جدول 12 به تفصیل آمده است ، که نشان می دهد فرضیه صفر (امتیاز z) برای هر دو اندازه گیری RH و AT رد شده است. مقدار مثبت شاخص موران برای هر دو نشان می دهد که خوشه های فضایی داده های همگن وجود دارد. مقدار z-score خروجی برای هر دو (به ترتیب 6.9 و 10.4) نشان میدهد که کمتر از 1٪ احتمال وجود دارد که الگوهای خوشهای میتوانند نتیجه شانس تصادفی باشند. از آنجایی که داده ها تصادفی نیستند، داده های آب و هوای تولید شده توسط کاربر، همراه با داده های آب و هوای IMS، می توانند به عنوان یک مجموعه داده یکپارچه با همبستگی فضایی در نظر گرفته شوند.
5.4. متراکم شدن
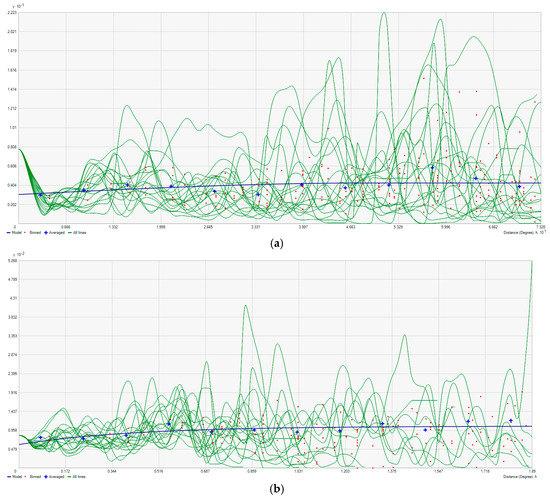
چگالش از طریق درون یابی کریجینگ معمولی، که برای داده های آب و هوا (به عنوان مثال، [ 45 ، 46 ]) مناسب ترین در نظر گرفته می شود ، در هر دو داده آب و هوای تولید شده توسط کاربر و IMS اجرا می شود. کریجینگ معمولی چندین مدل نیمه متغیری (همبستگی فضایی) دارد که می توان از آنها استفاده کرد و بر اساس داده های تجربی ایجاد شد. مدلی که بهترین تناسب با نیمواریوگرام را دارد در اینجا انتخاب میشود (مثلاً منحنی باید از مرکز ابر مقادیر binned و تا حد امکان نزدیک به مقادیر میانگین عبور کند). مدل هایی که به بهترین شکل برای نیم متغیره های AT و RH یافت می شوند، به ترتیب کروی و نمایی هستند که در شکل 11 نشان داده شده اند .
درون یابی قرائتهای AT سه بار اجرا شد: روی دادههای ایجاد شده توسط کاربر WeatherSignal، روی دادههای IMS و روی هر دو. با کم کردن شطرنجی درون یابی IMS از نمونه تولید شده توسط کاربر، نتایج از -2.7 درجه سانتیگراد تا 1.2 درجه سانتیگراد، با مقدار متوسط -1.1 درجه سانتیگراد و SD 1.2 درجه سانتیگراد متفاوت بود. مقادیر حداکثر مطلق تفاوت ها در مناطقی هستند که خوانش های تولید شده توسط کاربر کمیاب است، که دلالت بر درون یابی دارد که مقادیر را با تکیه بر داده های ناقص محاسبه می کند، به عنوان مثال، داده های آب و هوای تولید شده توسط کاربر ناکافی است. مشابه با AT، نقشه درونیابی تولید شده توسط کاربر RH نسبت به IMS پیوسته کمتری دارد، با درونیابی که در مناطقی با داده های پراکنده دقت کمتری دارد و منجر به اختلافات بزرگتر می شود. با کم کردن هر دو نقشه، مقادیر اختلاف در محدوده -3.3٪ و 14.1٪، با مقدار متوسط 6.7٪ و SD 3.5٪ است. تفاوتهای ارزشی قابل توجه عمدتاً در مناطقی با خوانشهای تولید شده توسط کاربر کمتر است. با مقایسه مناطقی که خوانش های تولید شده توسط کاربر بیشتری دارند، تفاوت در مقادیر AT و RH به ترتیب کمتر از -1 درجه سانتیگراد و کمتر از 5٪ بود که نتیجه خوبی است. اگرچه تفاوتهایی وجود دارد، اما نتایج کلی با توجه به اینکه توسط کاربرانی که بهطور داوطلبانه بدون تجهیزات خاص مشارکت میکنند، رضایتبخش است. این در مقایسه با داده های IMS، که یک شبکه آب و هوای رسمی است، نگهداری، نظارت و کنترل کیفیت است. این احتمال وجود دارد که دلیل تفاوت ها عمدتاً به دلیل درون یابی باشد که باعث کاهش دقت داده ها شده است، عمدتاً در مناطقی که چگالی پایین داده های تولید شده توسط کاربر دارند. با مقایسه مناطقی که خوانش های تولید شده توسط کاربر بیشتری دارند، تفاوت در مقادیر AT و RH به ترتیب کمتر از -1 درجه سانتیگراد و کمتر از 5٪ بود که نتیجه خوبی است. اگرچه تفاوتهایی وجود دارد، اما نتایج کلی با توجه به اینکه توسط کاربرانی که بهطور داوطلبانه بدون تجهیزات خاص مشارکت میکنند، رضایتبخش است. این در مقایسه با داده های IMS، که یک شبکه آب و هوای رسمی است، نگهداری، نظارت و کنترل کیفیت است. این احتمال وجود دارد که دلیل تفاوت ها عمدتاً به دلیل درون یابی باشد که باعث کاهش دقت داده ها شده است، عمدتاً در مناطقی که چگالی پایین داده های تولید شده توسط کاربر دارند. با مقایسه مناطقی که خوانش های تولید شده توسط کاربر بیشتری دارند، تفاوت در مقادیر AT و RH به ترتیب کمتر از -1 درجه سانتیگراد و کمتر از 5٪ بود که نتیجه خوبی است. اگرچه تفاوتهایی وجود دارد، اما نتایج کلی با توجه به اینکه توسط کاربرانی که بهطور داوطلبانه بدون تجهیزات خاص مشارکت میکنند، رضایتبخش است. این در مقایسه با داده های IMS، که یک شبکه آب و هوای رسمی است، نگهداری، نظارت و کنترل کیفیت است. این احتمال وجود دارد که دلیل تفاوت ها عمدتاً به دلیل درون یابی باشد که باعث کاهش دقت داده ها شده است، عمدتاً در مناطقی که چگالی پایین داده های تولید شده توسط کاربر دارند. نتایج کلی با توجه به اینکه توسط کاربرانی که داوطلبانه بدون تجهیزات خاص مشارکت می کنند، رضایت بخش است. این در مقایسه با داده های IMS، که یک شبکه آب و هوای رسمی است، نگهداری، نظارت و کنترل کیفیت است. این احتمال وجود دارد که دلیل تفاوت ها عمدتاً به دلیل درون یابی باشد که باعث کاهش دقت داده ها شده است، عمدتاً در مناطقی که چگالی پایین داده های تولید شده توسط کاربر دارند. نتایج کلی با توجه به اینکه توسط کاربرانی که داوطلبانه بدون تجهیزات خاص مشارکت می کنند، رضایت بخش است. این در مقایسه با داده های IMS، که یک شبکه آب و هوای رسمی است، نگهداری، نظارت و کنترل کیفیت است. این احتمال وجود دارد که دلیل تفاوت ها عمدتاً به دلیل درون یابی باشد که باعث کاهش دقت داده ها شده است، عمدتاً در مناطقی که چگالی پایین داده های تولید شده توسط کاربر دارند.
برای متراکم کردن هر دو مجموعه داده، دو نقشه آب و هوای جدید با استفاده از درون یابی کریجینگ معمولی، حاوی دادههای هر دو منبع ایجاد شد. نتایج درونیابی برای AT و RH در شکل 12 نشان داده شده است. با بررسی هر دو نقشه، مشخص است که آنها پیوسته و از نظر ارزش مشابه هستند و هیچ ناهنجاری قابل مشاهده ای در سراسر منطقه مورد تجزیه و تحلیل شناسایی نشده است. این فرضیه را پشتیبانی میکند که اندازهگیریهای تولید شده توسط کاربر صحیح هستند، اندازهگیریهای معتبر را سوگیری نمیکنند، و میتوانند برای تراکم در نظر گرفته شوند. مهمتر از آن، واضح است که برخی از شرایط فیزیکی در سطح محلی (عمدتا در منطقه مرکزی اسرائیل) آشکار و روشن شده است، که شناسایی آنها سخت بود مگر اینکه از داده های تولید شده توسط کاربر استفاده شود. نتیجه جالب دیگر این است که سطوح ارزش موجود برای هر دو درونیابی – تا حدی – با توپوگرافی موجود در اسرائیل و با شرایط هواشناسی توزیع شده از جنوب به شمال مطابقت دارد. اینها نتیجه مستقیم استفاده از مشاهدات جامع هستند،
6. نتیجه گیری و کار آینده
مفهوم استفاده از دادههای حسگر آب و هوای تولید شده توسط کاربر جمعسپاری شده از دستگاههای تلفن همراه برای تقویت شبکههای آب و هوای ژئوسنسور استاتیک، همراه با روششناسی توسعهیافته و عملکردهای متناسب ارائه شد. آزمایشهای انجامشده با گوشی هوشمند SG4 نشان داد که با دقتهای بهدستآمده، دادههای جمعآوریشده را میتوان برای برنامههای مختلف در نظر گرفت. برخی مسائل و رویههای خودکار برای تضمین قابلیت اطمینان کلی، یعنی شناسایی تثبیت و تجزیه و تحلیل آماری زمینشناسی، امکان جمعآوری دادهها در زمان واقعی را بدون نیاز به دادههای مرجع، مورد بررسی قرار دادند. تحقیقات ثابت کرد که با مدیریت صحیح داده ها، داده های تکمیلی جمع سپاری تولید شده توسط کاربر را می توان به منظور افزایش در نظر گرفت.
کار آینده استفاده از حجم بیشتری از دادههای جمعآوریشده در آزمایشهای میدانی و پروتکلهای ارتباطی مشاهدات در زمان واقعی، همراه با ارزیابی سهم دادههای تولید شده توسط کاربر در سیستمهای واقعی را بررسی خواهد کرد. کار بر روی فرآیند تراکم با در نظر گرفتن عوامل اضافی مانند وزن مشاهده، ساختار شبکه و توپوگرافی موجود برنامه ریزی شده است. سایر دادههای حسی فیزیکی، مانند فشار، مورد بررسی قرار خواهند گرفت، در حالی که در اسرائیل تنها 10 ایستگاه IMS مجهز به حسگرهای فشار هستند، به طوری که دادههای تولید شده توسط کاربر تأثیر و سهم بیشتری خواهند داشت.
در نتیجه، نتایج این تحقیق ارزشمند و مثبت است و نشان میدهد که حسگرهای تعبیهشده در دستگاههای تلفن همراه مدرن میتوانند برای جمعآوری دادههای آبوهوا از طریق فرآیند جمعسپاری برای تقویت شبکههای آبوهوای ژئوسنسور ایستا مورد استفاده قرار گیرند و مشاهدات بیشتری از پارامترهای آبوهوای مورد استفاده برای تراکم شبکه ارائه کنند. اعتقاد بر این است که کشورها و مناطق با پراکندگی پراکنده شبکههای ژئوسنسور ساکن میتوانند از این روشهای کاری بهره ببرند، در حالی که در آینده، همراه با پیشرفتهای تکنولوژیکی و ارتباطی، دادههای آب و هوای تولید شده توسط کاربر در زمان واقعی به اندازه ESN معتبر قابل اعتماد در نظر گرفته میشوند.





بدون نظر