1. معرفی
تأخیر تروپوسفر منبع خطای غالب در فناوریهای سامانه ماهوارهای ناوبری جهانی (GNSS) است که میتواند تا حدود 2 متر در جهت اوج سیگنال رادیویی در حال انتشار باشد. این خطا با انحراف جهت انتشار از نقطه اوج به سمت افق بیشتر می شود و در جهت افق می تواند تقریباً به 20 متر برسد [ 1 ]. بنابراین، تأخیر تروپوسفر زمانی که برای ناوبری و موقعیتیابی GNSS در زمان واقعی استفاده میشود، باید بهطور مؤثر اصلاح شود، بهویژه زمانی که در تکنیکهای موقعیتیابی نقطه دقیق GNSS در زمان واقعی اعمال میشود [ 2 ، 3 ]. علاوه بر این، تاخیر تروپوسفر یک پارامتر مهم در توموگرافی تروپوسفر و هواشناسی GNSS است [ 4،5 ،6 ، 7 ]. مدلهای تصحیح تروپوسفر تجربی، مانند مدل هاپفیلد و مدل Saastamoinen، میتوانند برای محاسبه تاخیر تروپوسفر در مکانهای دلخواه بر اساس دادههای هواشناسی ارائه شده استفاده شوند. با این حال، هر دو مدل به پارامترهای هواشناسی بلادرنگ برای محاسبات نیاز دارند زیرا استفاده از پارامترهای استاندارد هواشناسی منجر به دقت ضعیف می شود. بنابراین، بدیهی است که آنها نمی توانند تصحیح تاخیر تروپوسفر در زمان واقعی را برای تکنیک های ژئودتیک فضایی برآورده کنند.
در سالهای اخیر، یک روش موثر برای محاسبه تاخیر تروپوسفر اوج (ZTD) با استفاده از دادههای تحلیل مجدد مرکز ملی پیشبینی محیطی (NCEP) یا دادههای تحلیل مجدد مرکز اروپایی پیشبینیهای هوای متوسط (ECMWF) ایجاد شده است [8، 9 ] . , 10 , 11 ]. تعدادی از مطالعات برای ارزیابی ZTD به دست آمده از مجموعه داده های تحلیل مجدد انجام شده است. به عنوان مثال، چن و همکاران. [ 12 ، 13] امکان سنجی و دقت داده های ECMWF/NCEP را برای اصلاح تاخیر تروپوسفر در چین و آسیا ارزیابی کرد. نتایج تحقیق نشان داد که مجموعه دادههای تحلیل مجدد ECMWF هنگام استفاده برای محاسبه ZTD دقت بالاتری نسبت به مجموعه دادههای تحلیل مجدد NCEP نشان میدهند. به طور مشابه، چندین مدل تروپوسفر با استفاده از مجموعه داده های ECMWF یا NCEP در آمریکای شمالی و اتحادیه اروپا توسعه یافته است. به عنوان مثال، کالینز و همکاران. [ 14 ] مدل UNB3 (دانشگاه نیوبرانزویک) را معرفی کرد که تغییرات عمده در پروفیل بخار آب با عرض جغرافیایی را در نظر می گیرد. این به طور گسترده ای در سیستم تقویت منطقه گسترده (WAAS) در ایالات متحده استفاده شده است. در آمریکای شمالی، بایاس برای ZTD مشتق شده از مدل UNB3 به 20 سانتی متر می رسد و میانگین بایاس تقریباً 2 سانتی متر است. کروگر و همکاران [ 15] یک مدل TropGrid با مجموعه دادههای NCEP ایجاد کرد که تغییرات سالانه و روزانه را برای متغیرهایی مانند دما در نظر میگیرد که منجر به خطای ریشه میانگین مربع (RMS) ZTD 3.8 سانتیمتر میشود. Schuler [ 16 ] نسخه TropGrid2 را با بهبود مدل قبلی TropGrid توسعه داد. با این حال، نسخه جدید فقط کمی (1 میلی متر) دقیق تر از نسخه قدیمی در مقیاس جهانی است. لاگلر و همکاران [ 17 ] یک مدل جدید، GPT2، برای بهبود دمای فشار جهانی (GPT) توسعه داد [ 18 ]. GPT2 مبتنی بر یک ECMWF ERA-Interim دقیق تر است و تغییرات نیمه سالانه را در نظر می گیرد که می تواند فشار، دما و سایر پارامترهای کلیدی تروپوسفر را ارائه دهد. بوهم و همکاران [ 19] یک مدل بهبود یافته به نام GPT2w را پیشنهاد کرد که نرخ افت بخار آب و میانگین وزنی دمای (Tm) را اضافه می کند و وضوح افقی را در مقایسه با GPT2 بهبود می بخشد. علاوه بر این، لی و همکاران. [ 1 ] یک مدل ZTD جهانی (به نام مدل IGGtrop) با استفاده از داده های تحلیل مجدد NCEP ساخت که دقت بالاتری نسبت به مدل های UNB3 و UNB3m نشان می دهد. یائو و همکاران [ 20 ، 21 ] چندین مدل ZTD جهانی را بر اساس ECMWF ERA-Interim پیشنهاد کردند. مدل های جدید دقت بالاتری را در شرایط جهانی ارائه می دهند.
مشابه مدل UNB3، اتحادیه اروپا مدل سرویس همپوشانی ناوبری زمینی اروپا (EGNOS) را توصیه کرد که از مجموعه داده های ECMWF نیز مشتق شده بود [ 22 ]. مدل EGNOS تا حد زیادی در ایالات متحده و اتحادیه اروپا برای WAAS اعمال شده است، و عملکرد آن در آمریکای شمالی و اروپا بررسی شده است، با حداکثر خطای RMS در محدوده 13.2 تا 17.8 سانتی متر [23 ] . این مدلهای تجربی، مانند مدلهای سری EGNOS و UNB، دقت جهانی تصحیح میانگین بالاتری را ارائه میدهند.
تحقیقات گسترده ای برای ارزیابی ZTD به دست آمده از چند تکنیک انجام شده است. به عنوان مثال، Bock و همکاران. [ 24 ] و تکه و همکاران. [ 25 ] نشان داد که ZTD های مشتق شده از GPS و مداری داپلر و موقعیت یابی رادیویی یکپارچه شده توسط ماهواره (DORIS) ضریب همبستگی بالاتری را نشان می دهند. مطالعات مشابه منتشر شده توسط Wei et al. [ 26 ] و نینگ و همکاران. [ 27 ] نشان داد که ZTD های GPS و تداخل سنجی خط پایه بسیار طولانی (VLBI) تطابق قوی را با ضریب همبستگی بالاتر از 0.87 نشان می دهند. علاوه بر این، تکنیکهای ژئودتیک فضایی، مانند GNSS، VLBI، و DORIS، با در نظر گرفتن تفاوتهای ارتفاعی در مکانهای هممکانشده، تحت تأثیر همان تأخیرهای تروپوسفر قرار میگیرند [28] .]. اخیراً، تکنیکهای چندگانه، مانند GNSS، VLBI، و DORIS، تا حد زیادی در تعیین دقیق مدار ماهوارهها یا هواپیماها در زمان واقعی استفاده شدهاند [ 29 ، 30 ]. به عنوان مثال، اجرای موفقیت آمیز هواپیماهای سری Chang’E چین عمدتاً به مدارهای دقیق بستگی دارد [ 31 ]. از آنجایی که مدار دقیق به تصحیح تروپوسفر دقیق در پردازش دادههای تکنیکهای فضایی مربوط میشود، بنابراین بهبود دقت مدلهای تجربی، مانند مدلهای سری EGNOS و UNB، برای اصلاح تروپوسفر بلادرنگ در هر یک از موارد بسیار مهم است. ایستگاه های GNSS، VLBI و DORIS در مقیاس منطقه ای. امروزه حدود 25 سایت VLBI وجود دارد و 13 سایت DORIS در آسیا تاسیس شده است.http://ggosatm.hg.tuwien.ac.at/products.html ); تعداد ایستگاهها در سایتهای خدمات بینالمللی GNSS (IGS) در محل مشترک در حال افزایش است. علاوه بر این، تصحیح دقیق تروپوسفر اوج در پردازش دادههای VLBI، یا ترکیبی از VLBI و GNSS، میتواند منجر به بهبود در تکرارپذیری مختصات ایستگاه [ 32 ، 33 ، 34 ] و به ویژه به بهبود ارتفاع ایستگاه [ 35 ] شود. هدف اصلی این مقاله پالایش مدل EGNOS در یک سایت واحد با استفاده از دادههای IGS ZTD آسیا و ایجاد یک مدل سرویس روکش ناوبری زمین ثابت اروپایی بهبود یافته Single Site (به نام مدل SSIEGNOS) است که میتواند بدون هیچ دادههای هواشناسی عمل کند.
2. تعیین مدل SSIEGNOS
2.1. منابع اطلاعات
مدل تصحیح تروپوسفر EGNOS توسط سرویس همپوشانی ناوبری زمین ثابت اروپا ساخته شد. بدون هیچ گونه پارامتر هواشناسی اندازهگیری شده واقعی برای محاسبه ZTD، فقط به فشار، دما، فشار بخار آب، گرادیان دما و گرادیان فشار بخار آب متکی است. توابع در مدل EGNOS در Penna و همکاران توضیح داده شده است. [ 23 ].
در این مقاله، ما از دادههای ZTD از سال 2008 تا 2012، مشاهده شده از 46 سایت IGS توزیع شده در آسیا ( ftp://cddis.gsfc.nasa.gov/pub/gps/products/ )، با وضوح زمانی 5 دقیقه استفاده میکنیم. و دقت محاسبه ای تقریباً 4 میلی متری ZTD [ 36 ، 37 ]. منطقه مورد مطالعه تقریباً از 10 درجه شمالی تا 63 درجه شمالی در عرض جغرافیایی و 30 درجه شرقی تا 160 درجه شرقی در طول جغرافیایی را پوشش می دهد. مکان های سایت های IGS در شکل 1 نشان داده شده است .
2.2. ایجاد مدل SSIEGNOS
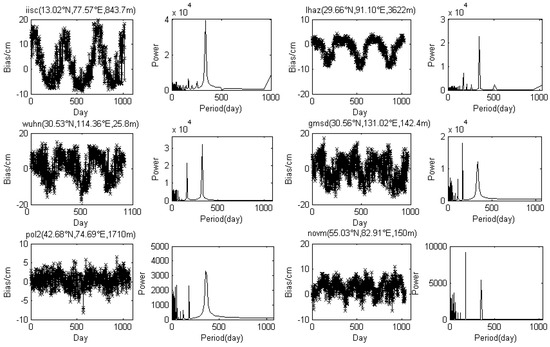
در این مطالعه، داده های ZTD از 2008-2010 مشاهده شده از 46 سایت IGS توزیع شده در آسیا به عنوان مقادیر مرجع در نظر گرفته می شوند. مقادیر میانگین سالانه و مقادیر تغییرات فصلی پنج پارامتر هواشناسی مدل EGNOS را می توان محاسبه کرد، همانطور که در Penna و همکارانش توضیح داده شده است. [ 23]. سه سال سوگیری روزانه ZTD، مشتق شده از مدل EGNOS، با مقایسه با مقادیر ZTD مرجع به دست آمد. یک پدیده آشکار از تجزیه و تحلیل طیفی برای تعصب روزانه ZTD با استفاده از تبدیل فوریه سریع شناسایی شده است. تنوع تعصب روزانه یک چرخه سالانه را در مکانهایی که کمتر از 30 درجه عرض جغرافیایی آسیا قرار دارند نشان میدهد. با این حال، یک چرخه سالانه و یک چرخه نیمه سالانه در مکان های بالاتر از 30 درجه عرض جغرافیایی در آسیا نشان داده شده است. نتایج تجزیه و تحلیل طیفی در بین هر 6 سایت IGS در آسیا در شکل 2 نشان داده شده است . شکل 2 نشان می دهد که بایاس روزانه را می توان تقریباً با تابع کسینوس مطابق فرمول زیر بیان کرد:
که در آن تی و B i a S (φمن،λمن، تی ) بمنآس(�من،�من،تی)روز سال و سوگیری روزانه (که به عنوان پارامترهای شناخته شده در نظر گرفته می شوند) هستند. B i aسm e a n(φمن،λمن)بمنآسمترهآ�(�من،�من)میانگین سوگیری سالانه است. A m p 1 (φمن،λمن)آمترپ1(�من،�من)و A m p 2 (φمن،λمن)آمترپ2(�من،�من)به ترتیب دامنه های مولفه سالانه و نیمه سالانه هستند. د1 (φمن،λمن)د1(�من،�من)و د2 (φمن،λمن)د2(�من،�من)به ترتیب فازهای اجزای سالانه و نیمه سالانه هستند. ψ ( t ) �(تی)و ξ�(t) باقیمانده ها هستند. و φ�عرض جغرافیایی سایت است. پارامترهای ناشناخته ( B i aسm e a n(φمن،λمن)بمنآسمترهآ�(�من،�من)، A m p 1 (φمن،λمن) آمترپ1(�من،�من)، A m p 2 (φمن،λمن) آمترپ2(�من،�من)، د1 (φمن،λمن)د1(�من،�من)، و د2 (φمن،λمن)د2(�من،�من)) در رابطه (1) بر اساس روش حداقل مربعات غیرخطی با استفاده از سه سال داده بایاس روزانه در هر سایت IGS برآورد شده است.
همانطور که در بالا تحلیل شد، فرمول مدل SSIEGNOS را می توان به صورت زیر بیان کرد:
جایی که زتیDEجی نای اسزتی��جین�اسZTD مشتق شده از مدل EGNOS را نشان می دهد. B i a S (φمن،λمن، تی )بمنآس(�من،�من،تی)مقدار تصحیح ZTD مدل EGNOS است که با رابطه (1) قابل محاسبه است. و زتیDاساسمنEجی نای اسزتی�اساسمن�جین�اسZTD مشتق شده از مدل SSIEGNOS است.
3. اعتبارسنجی مدل SSIEGNOS
همانطور که در بخش 2 تحلیل شد، تعصبات ZTD بین IGS، ZTD و ZTD مشتق شده از EGNOS چرخه های سالانه واضح و چرخه های نیمه سالانه را ارائه می دهند. بنابراین، بایاسهای ZTD را میتوان با استفاده از تابع کسینوس یا سینوسی مدلسازی کرد و مدل SSIEGNOS را نیز میتوان توسعه داد. در این بخش، برای اعتبارسنجی مدل SSIEGNOS، داده های ZTD از 2008-2010، به دست آمده از 46 سایت IGS توزیع شده در آسیا، به عنوان مقادیر مرجع در نظر گرفته می شوند. نتایج با نتایج مدل EGNOS مقایسه شده است. دقت و پایداری SSIEGNOS پیشنهادی جدید و دو مدل دیگر با استفاده از دو شاخص ارزیابی میشوند: بایاس، خطای بین مقادیر مدل و مقادیر مرجع. و RMS، دقت و پایداری مدل. بایاس و خطای RMS ویژگیهای توزیع زمانی و مکانی تحلیل میشوند. فرمول های بایاس و RMS به شرح زیر است:
جایی که زتیDمنمترزتی�مترمنمقدار محاسبه شده توسط مدل های EGNOS و SSIEGNOS است، زتیDمنمنجی اس زتی�منجیاسمنمقدار مرجع مشتق شده از محصولات تروپوسفر IGS است و N تعداد محاسبات ZTD است.
3.1. تغییر زمانی خطای بایاس و RMS
3.1.1. تغییر جهت گیری روزانه و خطای RMS
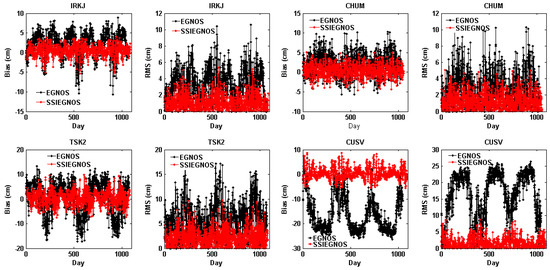
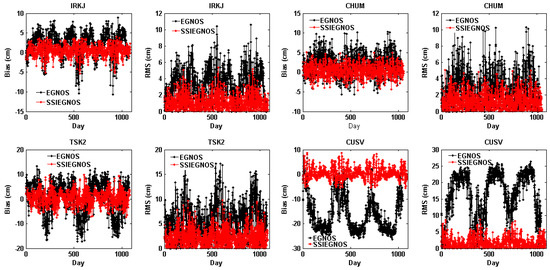
برای تجزیه و تحلیل تنوع بایاس روزانه و خطای RMS مدلهای SSIEGNOS و EGNOS، بایاس و خطای RMS در هر سایت برای هر روز تجزیه و تحلیل شد. شکل 3 تنوع بایاس روزانه و خطای RMS مدل های SSIEGNOS و EGNOS را به ترتیب در سایت های IRKJ (آسیای شمالی)، CHUM (آسیای غربی)، TSK2 (آسیای شرقی)، و CUSV (آسیای جنوبی) نشان می دهد. بایاس و خطای RMS در سایتهای دیگر ویژگیهای مشابهی را نشان میدهند.
شکل 3یک رفتار چرخهای آشکار در بایاس روزانه و خطای RMS در مدل EGNOS نشان میدهد که در تابستان به حداکثر مقادیر میرسد. همچنین دریافتیم که بایاس روزانه و خطای RMS در سایت CHUM (واقع در غرب آسیا) نسبت به سایتهای دیگر دارای تنوع کمتری است. علاوه بر این، سایت TSK2 در مرز اقیانوس و خشکی قرار دارد و بنابراین دامنههای بزرگتری از بایاس و خطای RMS در شرق آسیا به دلیل تأثیر آب و هوای دریایی و تغییرات چشمگیر در بخار آب جوی ارائه میکند. تنوع بیشتری نیز در تابستان در سایت CUSV مشاهده می شود که در مجاورت ناحیه عرض جغرافیایی کم جنوب آسیا است و عمدتاً تحت تأثیر رژیم های آب و هوایی گرمسیری و دریایی قرار دارد. مدل SSIEGNOS تغییرات پایدار و کمی را از نظر بایاس و خطای RMS نشان میدهد. نوسانات کوچکتر در تابستان در شرق و جنوب آسیا مشاهده می شود.
3.1.2. تغییر ماهانه بایاس و خطای RMS
به منظور تجزیه و تحلیل تغییرات ماهانه سوگیری و RMS برای مدلهای SSIEGNOS و EGNOS، سه سال سوگیری و RMS در 46 سایت، از سال 2008 تا 2010، برای آمار ماهانه و فصلی استفاده میشود. نتایج آماری در شکل 4 و جدول 1 نشان داده شده است .
شکل 4 تغییرات فصلی آشکار بایاس و خطای RMS را برای مدل EGNOS نشان می دهد. بایاس و خطای RMS در تابستان مقادیر بیشتری دارند و در سایر فصول تغییرات نسبتاً کمتری دارند. حداکثر سوگیری منفی در ماه آگوست به دلیل تأثیر بخار آب متغیر جو رخ می دهد. مدل SSIEGNOS همچنین نشان میدهد که بایاس ماهانه و خطای RMS در همه ماهها نامنظم است، با تغییرات کلی کمتر. از این رو، مدل SSIEGNOS می تواند به یک نتیجه اصلاحی برجسته در مقایسه با مدل EGNOS دست یابد.
جدول 1 نشان می دهد که در مدل EGNOS حداکثر سوگیری در تابستان و کمترین سوگیری در پاییز رخ می دهد. خطای RMS نیز در تابستان به حداکثر و در زمستان به حداقل می رسد. در مدل SSIEGNOS، حداکثر بایاس در زمستان و کمترین آن در پاییز رخ می دهد، در حالی که خطای RMS در پاییز به حداکثر و در زمستان به حداقل می رسد. علاوه بر این، تنوع پایداری را در تمام فصول ارائه می دهد.
3.1.3. تغییر سوگیری سالانه و خطای RMS
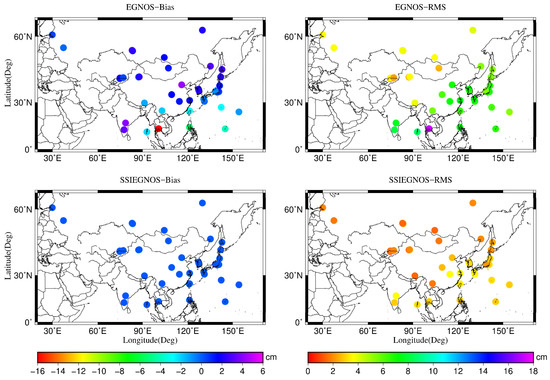
سه سال سوگیری و خطای RMS از سال 2008 تا 2010 در 46 سایت برای تجزیه و تحلیل آمار سالانه مدلهای EGNOS و SSIEGNOS استفاده میشود. توزیع بایاس سالانه و خطای RMS مدل های EGNOS و SSIEGNOS در شکل 5 ارائه شده است . شکل 5نشان میدهد که بایاس سالانه و خطای RMS در مدل EGNOS تغییرات بزرگتری در آسیای شرقی و جنوبی و تغییرات نسبتاً کوچکتری در غرب و شمال آسیا دارند. در مدل SSIEGNOS، بایاس و خطای RMS تغییرات کمتری را در آسیا نشان می دهد، به ویژه در نواحی غربی و با عرض جغرافیایی بالا در شمال آسیا، جایی که خطای RMS کمتر از 2 سانتی متر است، که نشان می دهد مدل SSIEGNOS می تواند برای مطالعه استفاده شود. تاخیر تروپوسفر اوج با دقت بالا در این مناطق. در مقایسه با ZTD مشتق شده از مرکز IGS، دقت ZTD محاسبه شده از مدل SSIEGNOS بهتر از مدل EGNOS در آسیا است. در مدل SSIEGNOS، بایاس و خطای RMS به ترتیب 0.00 سانتی متر و 2.52 سانتی متر هستند، در حالی که خطاهای مدل EGNOS به ترتیب 0.12 سانتی متر و 5.87 سانتی متر هستند. بنابراین، نسبت به مدل EGNOS، بایاس مطلق و خطای RMS مدل SSIEGNOS در مکانهای کمتر از 30 درجه عرض جغرافیایی به ترتیب 99% و 62% کاهش مییابد و در مکانهای بالاتر از 30 درجه عرض جغرافیایی به ترتیب 99% و 54% با کاهش کلی کاهش مییابد. به ترتیب 99% و 57% در آسیا. این نتایج نشان میدهد که مدل SSIEGNOS نسبت به مدل EGNOS در آسیا، بهویژه در مناطق کم عرض جغرافیایی، توانایی اصلاح قابلتوجهی برتری دارد. علاوه بر این، ما همچنین متوجه میشویم که خطای RMS سالانه مدلهای SSIEGNOS و EGNOS با افزایش عرض جغرافیایی کاهش مییابد. این یافته در بخش بعدی بیشتر مورد بررسی قرار خواهد گرفت. به ترتیب با کاهش کلی 99 و 57 درصدی در آسیا. این نتایج نشان میدهد که مدل SSIEGNOS نسبت به مدل EGNOS در آسیا، بهویژه در مناطق کم عرض جغرافیایی، توانایی اصلاح قابلتوجهی برتری دارد. علاوه بر این، ما همچنین متوجه میشویم که خطای RMS سالانه مدلهای SSIEGNOS و EGNOS با افزایش عرض جغرافیایی کاهش مییابد. این یافته در بخش بعدی بیشتر مورد بررسی قرار خواهد گرفت. به ترتیب با کاهش کلی 99 و 57 درصدی در آسیا. این نتایج نشان میدهد که مدل SSIEGNOS نسبت به مدل EGNOS در آسیا، بهویژه در مناطق کم عرض جغرافیایی، توانایی اصلاح قابلتوجهی برتری دارد. علاوه بر این، ما همچنین متوجه میشویم که خطای RMS سالانه مدلهای SSIEGNOS و EGNOS با افزایش عرض جغرافیایی کاهش مییابد. این یافته در بخش بعدی بیشتر مورد بررسی قرار خواهد گرفت.
3.2. ویژگی های فضایی سوگیری سالانه و خطای RMS
3.2.1. روابط بین ارتفاع و ارور سالانه و خطای RMS
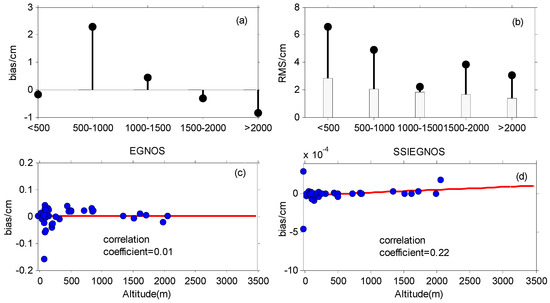
تنوع ZTD به دلیل همبستگی قوی بین ZTD و ارتفاع در نوسان نوسان آسیا پیچیده است. به منظور بررسی رابطه بین تعصب سالانه و خطای RMS با ارتفاع، 46 سایت IGS بر اساس ارتفاع به پنج دسته طبقه بندی شدند. کمتر از 500 متر، 500 تا 1000 متر، 1000 تا 1500 متر، 1500 تا 2000 متر و بالاتر از 2000 متر. تغییرات بایاس سالانه و خطای RMS در هر محدوده ارتفاعی در شکل 6 نشان داده شده است .
شکل 6 نشان می دهد که تعصب سالانه با افزایش ارتفاع در مدل های SSIEGNOS و EGNOS آشکار نیست. با این حال، تعصب سالانه یک همبستگی جزئی با ارتفاع نشان می دهد. به طور کلی، خطای RMS سالانه با افزایش ارتفاع در هر دو مدل SSIEGNOS و EGNOS کاهش مییابد، اما در محدوده ارتفاعی 1000 تا 1500 متر، این اثر در مدل EGNOS کمتر است.
3.2.2. روابط بین Latitude و Annual Bias و RMS Error
تنوع ZTD به دلیل توپوگرافی و آب و هوای پیچیده در توزیع گسترده زمین و آب در آسیا پیچیده است. روابط بین عرض جغرافیایی و بایاس سالانه و خطای RMS در مدلهای SSIEGNOS و EGNOS تجزیه و تحلیل میشوند.
برای تجسم تغییرات بایاس سالانه و خطای RMS، 46 سایت IGS از نظر عرض جغرافیایی در فواصل 10 درجه طبقه بندی شدند، یعنی 10°~20°, 20°~30°, 30°~40°, 40°~50°. درجه و بالاتر از 50 درجه. نتایج در شکل 7 نشان داده شده است .
شکل 7 نشان می دهد که خطای RMS سالانه با افزایش عرض جغرافیایی در هر دو مدل SSIEGNOS و EGNOS کاهش می یابد. با این حال، شکل 7 c,d ظاهراً نشان می دهد که سوگیری سالانه همبستگی کمی با عرض جغرافیایی در هر دو مدل دارد.
3.2.3. روابط بین طول جغرافیایی و بایاس سالانه و خطای RMS
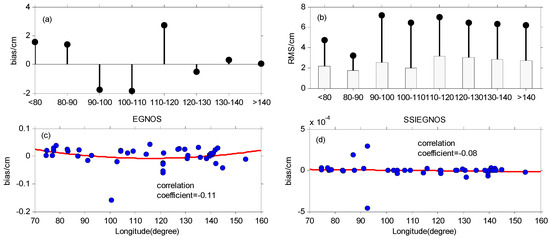
برای مطالعه روابط بین طول جغرافیایی و بایاس سالانه و خطای RMS برای مدلهای SSIEGNOS و EGNOS، 46 سایت IGS بر اساس طول جغرافیایی با استفاده از فواصل 10 درجه طبقهبندی شدند: کمتر از 80 درجه، 80 درجه تا 90 درجه، 90 درجه تا 100 درجه، 100°~110°, 110°~120°, 120°~130°, 130°~140°, و بالاتر از 140°. علاوه بر این، همبستگی بین تعصب سالانه و طول جغرافیایی نیز تحلیل میشود. نتایج در شکل 8 نشان داده شده است .
شکل 8 روابط نامنظم بین طول جغرافیایی و بایاس سالانه و خطای RMS مدل های SSIEGNOS و EGNOS را نشان می دهد. بایاس سالانه یک همبستگی کوچک با طول جغرافیایی با توجه به ضریب همبستگی نشان می دهد.
3.3. ارزیابی ZTD پیش بینی شده برگرفته از مدل SSIEGNOS
3.3.1. عملکرد مدل SSIEGNOS برای پیش بینی ZTD
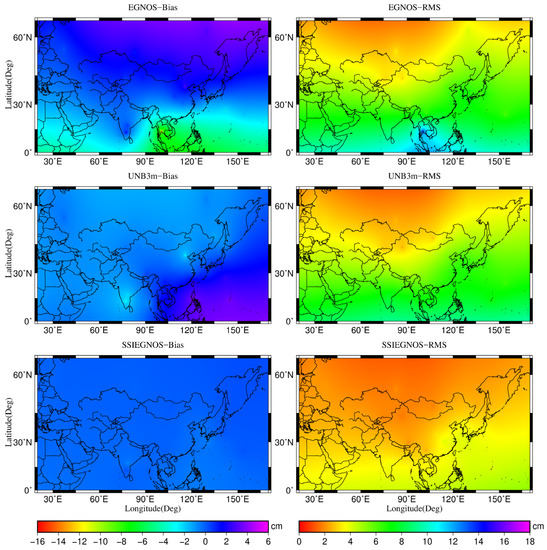
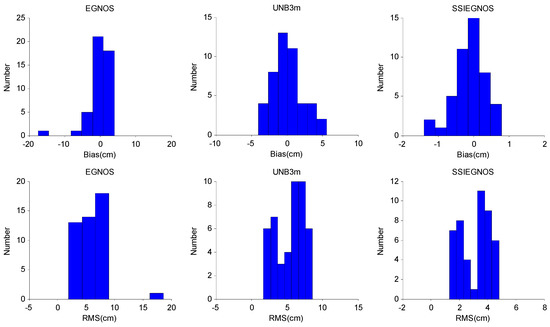
برای اعتبارسنجی دقت ZTD پیشبینیشده با استفاده از مدل SSIEGNOS، یک سال از دادههای ZTD از سال 2011، با دقت بالاتر، از 46 سایت IGS توزیعشده در آسیا استخراج شد و بهعنوان مقادیر مرجع در نظر گرفته شد. دقت پیشبینیشده مدل SSIEGNOS با مدلهای EGNOS و UNB3m مقایسه میشود. ZTDهای پیشبینیشده از مدلهای SSIEGNOS، EGNOS و UNB3m مشتق شدند. جزئیات عملکردها در مدل UNB3m در Leandro و همکاران توضیح داده شده است. [ 38 ]. نتایج با داده های ZTD ارائه شده توسط مرکز IGS مقایسه شده است. توزیع سوگیری پیشبینیشده و خطای RMS مدلهای EGNOS، UNB3m، و SSIEGNOS در آسیا در شکل 9 و نتایج آماری در جدول 2 و شکل 10 نشان داده شده است..
جدول 2 محدوده مقدار و مقادیر میانگین سالانه بایاس و خطای RMS ZTD پیش بینی شده محاسبه شده از مدل های EGNOS، UNB3m و SSIEGNOS در آسیا را نشان می دهد. همانطور که در جدول 2 مشاهده می شود ، ZTD را می توان در سطح سانتی متر توسط مدل SSIEGNOS پیش بینی کرد. میانگین سالانه بایاس و خطای RMS مدل SSIEGNOS به ترتیب -0.1 سانتی متر و 3.1 سانتی متر است که کمتر از مدل های EGNOS و UNB3m است. شکل 9نشان می دهد که سوگیری پیش بینی شده هر دو مدل EGNOS و مدل UNB3m در آسیای مرکزی کمتر و در شرق آسیا و در عرض های جغرافیایی پایین تر است، در حالی که سوگیری پیش بینی شده SSIEGNOS در تمام آسیا کم است. مدل EGNOS و مدل UNB3m نتایج قابل مقایسه ای را نشان می دهند که خطای RMS پیش بینی شده بیشتری در آسیا دارند. RMS تقریباً 4 سانتی متری در ناحیه عرض جغرافیایی بالا در شمال غربی آسیا رخ می دهد. مدل SSIEGNOS دارای RMS پیش بینی شده بهتر از 3 سانتی متر در مکان های بالاتر از 30 درجه عرض جغرافیایی است. نتایج کمی ضعیف تر در عرض های جغرافیایی پایین جنوب و شرق آسیا مشاهده می شود. با این حال، با خطای RMS کمتر از 5 سانتی متر، هنوز هم می توان نتایج اصلاح قابل توجهی را در این مناطق به دست آورد. نسبت به مدل EGNOS، بایاس مطلق و خطای RMS سالانه ZTD پیشبینیشده مدل SSIEGNOS به ترتیب در مکانهای کمتر از 30 درجه عرض جغرافیایی 95% و 54% کاهش یافته و در مکانهای بالاتر از 30 درجه عرض جغرافیایی به ترتیب 94% و 45% کاهش مییابد. . بنابراین، سوگیری مطلق سالانه و RMS پیشبینیشده ZTD به ترتیب 55 درصد و 48 درصد در کل آسیا کاهش مییابد. این نشان می دهد که دقت پیش بینی شده بالاتری را می توان در عرض های جغرافیایی کمتر از 30 درجه در مدل SSIEGNOS به دست آورد.
شکل 10 هیستوگرام های بایاس و خطای RMS سالانه مدل های EGNOS، UNB3m و SSIEGNOS را نشان می دهد. تغییر بایاس سالانه در مدل SSIEGNOS بین -1.4 سانتی متر و 0.8 سانتی متر است و خطای RMS بین 1.3 سانتی متر تا 4.8 سانتی متر است. در شکل 10 ، هیستوگرام های هر دو بایاس و خطای RMS مدل SSIEGNOS بسیار متمرکزتر از مدل های EGNOS و UNB3m هستند. شکل 9 و شکل 10 و جدول 2 ظاهراً نشان میدهند که مدل SSIEGNOS دقت پیشبینیشده بالاتری را نسبت به مدلهای EGNOS و UNB3m در آسیا به دست میدهد، با نتایج قابل مقایسه با محاسبه ZTD با استفاده از دادههای تحلیل مجدد ECMWF [12 ] .
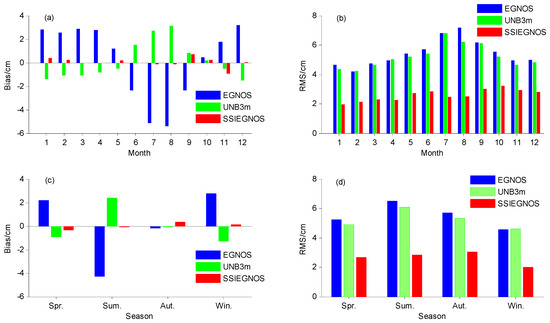
برای بررسی تغییرات ماهانه و فصلی بایاس و خطای RMS پیشبینیشده در مدل SSIEGNOS، یک سال بایاس و خطای RMS از 46 سایت در سال 2011 برای آمار ماهانه و فصلی استفاده شد. نتایج همچنین با مدلهای EGNOS و UNB3m مقایسه میشوند. نتایج آماری در شکل 11 نشان داده شده است .
شکل 11 تغییرات ماهانه و فصلی سوگیری پیش بینی شده را بدون تنظیم آشکار در سه مدل نشان می دهد. خطای RMS پیشبینیشده تغییرات فصلی ظاهری را در هر دو مدل EGNOS و مدل UNB3m نشان میدهد، با مقادیر بزرگتر در تابستان و مقادیر کوچکتر در زمستان. با این حال، در مدل SSIEGNOS، خطای RMS پیشبینیشده تغییرات ماهانه جزئی را نشان میدهد، با مقادیر کمتر در زمستان و مقادیر کمی بزرگتر در پاییز. از این رو، مدل SSIEGNOS تغییرات فصلی نسبتاً کمی دارد.
3.3.2. بررسی سری زمانی بلند مدت ZTD پیش بینی شده
همانطور که در بالا تحلیل شد، تغییرات سالانه خطای RMS پیشبینیشده در مدل SSIEGNOS، ویژگیهای منطقهای آشکار را در آسیا نشان میدهد. بنابراین، ما سایتهای IRKT (آسیای شمالی)، PIMO (آسیای جنوبی)، POL2 (آسیای غربی)، و TSK2 (آسیای شرقی) را به عنوان چهار سایت معمولی IGS برای بررسی امکانسنجی استفاده از مدل SSIEGNOS برای پیشبینی بلندمدت انتخاب کردیم. سری زمانی ZTD. در این بخش، ما از مدل SSIEGNOS برای پیشبینی دو سال ZTD از 2011 تا 2012 برای چهار سایت معمولی IGS استفاده میکنیم. نتایج پیشبینیشده نیز با مدلهای EGNOS و UNB3m مقایسه میشوند. به طور مشابه، دو سال ZTD مشتق شده از مرکز IGS به عنوان مقادیر مرجع در نظر گرفته می شود. در نهایت، تغییرات سوگیری پیش بینی شده روزانه، ماهانه، فصلی و سالانه و خطای RMS به ترتیب برای چهار سایت مورد تجزیه و تحلیل قرار می گیرند.
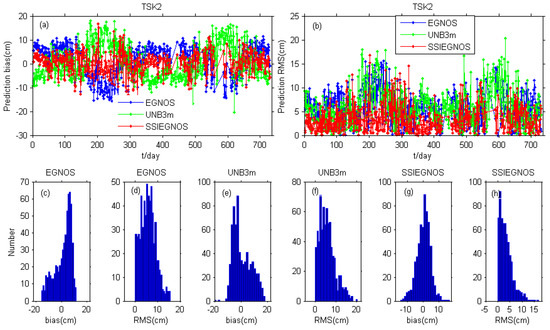
ابتدا، ما سوگیری پیشبینیشده روزانه و خطای RMS را در چهار سایت از سال 2011 تا 2012 تجزیه و تحلیل میکنیم. نتایج آماری در شکل 12 ، شکل 13 ، شکل 14 و شکل 15 نشان داده شده است .
شکل 12 ، شکل 13 ، شکل 14 و شکل 15نشان میدهد که بایاس پیشبینیشده روزانه و خطای RMS در مدل SSIEGNOS تغییرات پایدار و مشابه قابلتوجهی را هر ساله در بین چهار سایت IGS نشان میدهد. علاوه بر این، مدل SSIEGNOS نتایج پالایش قابل توجهی در سایتهای PIMO (آسیای جنوبی) و TSK2 (آسیای شرقی) در مقایسه با مدلهای EGNOS و UNB3m دارد. ما همچنین دریافتیم که مدل EGNOS دارای یک سوگیری منفی میانگین بزرگتر در سایت PIMO و یک سوگیری میانگین مثبت در سایت های IRKT و TSK2 است. با این حال، مدل UNB3m نتایج معکوس را در سایتهای PIMO، IRKT و TSK2 نشان میدهد. با این حال، در مدل SSIEGNOS، دو سال سوگیری پیشبینیشده روزانه در چهار سایت تقریباً به توزیع نرمال منتسب میشود. بنابراین، مدل SSIEGNOS عملکرد دقیقتری نسبت به مدلهای EGNOS و UNB3m از نظر پیشبینی سری زمانی بلندمدت ZTD نشان میدهد. ما به راحتی می توانیم تعیین کنیم که پیش بینی ZTD مدل SSIEGNOS رفتار مشابهی را در سال های 2011-2012 نشان می دهد. به عبارت دیگر، مدل SSIEGNOS هنگام استفاده برای پیشبینی سری زمانی بلندمدت ZTD، پایداری بالایی را نشان میدهد.
شکل 14 نشان می دهد که مدل SSIEGNOS در مقایسه با مدل های EGNOS و UNB3m عملکرد پالایش کمی ضعیف تری در سایت POL2 دارد. سایت POL2 در ناحیه عرض جغرافیایی بالا آسیا واقع شده است، بنابراین هر دو مدل EGNOS و مدل UNB3m عملکرد قوی در محاسبه ZTD در این منطقه از خود نشان می دهند. از این رو، با استفاده از مدل SSIEGNOS، یک نتیجه پالایش کمی ضعیفتر در این منطقه به دست میآید. با این حال، مدل SSIEGNOS همچنان میتواند عملکرد مناسبی را در پیشبینی سری زمانی بلندمدت ZTD در ناحیه عرض جغرافیایی بالا آسیا حفظ کند.
علاوه بر این، میانگین ماهانه و فصلی پیشبینیشده بایاس و خطای RMS برای سه مدل تحلیل میشوند. نتایج در شکل 16 و شکل 17 نشان داده شده است .
شکل 16 و شکل 17 نشان می دهد که مدل SSIEGNOS هیچ گونه تغییرات ثابتی را در میانگین ماهانه و فصلی پیش بینی شده بایاس و خطای RMS نشان نمی دهد، به ویژه از نظر خطای RMS، که مقادیر کم را در تابستان در سایت های PIMO و POL2 نشان می دهد. در مقابل، دو سایت دیگر مقادیر بیشتری را در تابستان نشان می دهند. مدل SSIEGNOS همچنین از نظر بایاس پیشبینی شده ماهانه و فصلی و خطای RMS دقت بالاتری نسبت به مدلهای EGNOS و UNB3m در هر ماه از سال 2011 تا 2012 نشان میدهد.
در نهایت، جدول 3 نشان می دهد که سوگیری پیش بینی شده سالانه و خطای RMS مدل SSIEGNOS بین سال های 2011 و 2012 تغییرات کوچکی را در چهار سایت ارائه می دهد. از این رو، مدل SSIEGNOS هنگامی که برای پیشبینی سریهای زمانی بلندمدت ZTD استفاده میشود، پایداری قابلتوجهی را نشان میدهد.
در نتیجه، مدل SSIEGNOS زمانی که برای پیشبینی سری زمانی بلندمدت ZTD استفاده میشود، پایداری قابلتوجهی و دقت بالاتری را نشان میدهد، که، بدون هیچ گونه دادههای هواشناسی، تنها میتواند به زمان و موقعیت سایت مربوط باشد. در آینده، پارامترهای مدل SSIEGNOS برای هر ایستگاه را می توان با استفاده از آخرین سه سال IGS ZTD مشتق شده از مرکز IGS به روز کرد. بنابراین، ما می توانیم از پارامترهای به روز شده SSIEGNOS برای پیش بینی یک یا دو سال آینده ZTD برای هر ایستگاه استفاده کنیم. بنابراین، ما پیشنهاد میکنیم که مدل SSIEGNOS را میتوان بهعنوان یک مدل تصحیح تروپوسفر تک مکان در زمان واقعی برای تکنیک VLBI یا سایر تکنیکهای ژئودتیک فضایی در آسیا به کار برد.
4. نتیجه گیری
در این مطالعه، پنج سال داده ZTD از سال 2008 تا 2012 از 46 سایت IGS توزیع شده در آسیا برای بررسی عملکرد مدل SSIEGNOS استفاده شد. نتایج به شرح زیر است:
(1) نسبت به ZTD مشاهده شده توسط IGS، بایاس و خطای RMS ZTD محاسبه شده از مدل EGNOS به ترتیب 0.12 سانتی متر و 5.87 سانتی متر است، در حالی که خطاهای مدل SSIEGNOS به ترتیب 0.00 سانتی متر و 2.52 سانتی متر هستند. علاوه بر این، مدل SSIEGNOS دقت پیشبینیشده بالاتری را در عرضهای جغرافیایی کمتر از 30 درجه نشان میدهد.
(2) مدل EGNOS تغییرات فصلی را از نظر بایاس و خطای RMS نشان میدهد. مدل SSIEGNOS تغییرات جزئی را نشان میدهد و عملکرد پالایش بهتری در تابستان در مقایسه با مدل EGNOS دارد. رابطه بین بایاس با ارتفاع، طول و عرض جغرافیایی برای دو مدل مشخص نیست، اما خطای RMS به طور کلی با افزایش ارتفاع و عرض جغرافیایی کاهش مییابد. علاوه بر این، مدل SSIEGNOS اثر تصحیح قابل توجهی در مناطق عرض جغرافیایی پایین دارد.
(3) مدل SSIEGNOS پایداری قابلتوجهی و دقت بالاتری نسبت به مدل EGNOS و مدل UNB3m نشان میدهد که برای پیشبینی سری زمانی بلندمدت ZTD، حتی بدون هیچ دادههای هواشناسی استفاده میشود، در حالی که مدلهای EGNOS و UNB3m نتایج پیشبینیشده قابل مقایسه را نشان میدهند. بنابراین، ما میتوانیم مدل SSIEGNOS را بهعنوان مدل تصحیح تروپوسفر تک سایت در زمان واقعی GNSS، VLBI و DORIS در آسیا در نظر بگیریم.
(4) مدل SSIEGNOS در آسیا به یک شکل است، فقط پارامترها در سایت های مختلف متفاوت است، بنابراین مدل SSIEGNOS را می توان برای سایت هایی که در آسیا قرار دارند در صورت مجهز بودن به گیرنده های GNSS دائمی استفاده کرد. در کارهای آینده، ترکیب دادههای چند منبعی برای پالایش مدل EGNOS در آسیا یا منطقه جهانی باید مورد بررسی قرار گیرد، زیرا احتمالاً دقت را بیشتر میکند.










بدون نظر