1. معرفی
در علوم ژئومورفولوژی، نقشه برداری ناپیوستگی های سطحی که به دلیل زمین لغزش ها ظاهر شده اند برای تجزیه و تحلیل توسعه جابجایی به طور مناسب بسیار مهم است. ناپیوستگی های سطحی ذکر شده به عنوان شکاف های سطحی نیز گفته می شود که ترک ها و شکستگی های باز در زمین را توصیف می کنند. سازندهای مختلفی از حرکات روی سطح زمین لغزش پدید می آیند، مانند دهانه ها و لغزش ها، که می توانند باعث تغییرات ناگهانی ارتفاع در سراسر و در امتداد خطوط گسل شوند. برای بررسی شکاف های زمین لغزش می توان از روش های مختلف اندازه گیری استفاده کرد. به عنوان مثال، بررسی های میدانی فشرده کار، دقت زیر سانتی متری را ارائه می دهد که دقیق ترین روش برای استخراج جزئیات با جزئیات است. با این حال، بررسی میدانی برای وسعت وسیع زمین با توجه به زمان طولانی جمع آوری داده ها کافی نیست. ارزیابی فتوگرامتری تصاویر موجود در هوا یک گزینه نقشه برداری جایگزین است که بسته به قابلیت دوربین و ارتفاعات پروازی متوسط، می تواند ویژگی های توپوگرافی مناطق وسیع زمین لغزش در اطراف دقت زیر دسی متر را به دست آورد. محصولات فتوگرامتری هوایی، مانند مدل رقومی ارتفاع (DEM) و عکسهای ارتوفوتو، منابع داده ضروری برای تعیین سینماتیک حرکات در مناطق زمین لغزش با پایش زمانی، به جای بررسی میدانی گسترده هستند.1 ، 2 ].
در پنج سال گذشته، توسعه سیستمهای هوایی بدون سرنشین (UAS) شاهد بهبود تکنیکهای نقشهبرداری ذکر شده در بالا بوده است، زیرا نتایج بسیار دقیقی تولید میکنند، اما به زمان نسبتاً کوتاهی برای جمعآوری دادهها نیاز دارند. فتوگرامتری مبتنی بر UAS یا سنجش از راه دور قادر است دادههای با دقت بالا را با استفاده از انواع حسگرهای مختلف مانند دوربینهای دیجیتال، دوربینهای حرارتی، دوربینهای چند طیفی و اسکنرهای لیزری به سرعت ارائه دهد. کاربردهای کنونی UAS در ژئوماتیک را می توان به طور خلاصه به شرح زیر دسته بندی کرد: کاربردهای کشاورزی و محیطی، نظارت، پایش هوایی در مهندسی، میراث فرهنگی، نقشه برداری و کاربردهای کاداستر [3] .]. به ویژه، در پایش زمینی به عنوان زیرشاخه پایش هوایی در مهندسی، فتوگرامتری مبتنی بر UAS شروع به ایفای نقش مهمی در پایش و تشخیص زمین لغزش کرده است [ 4 ، 5 ].
استفاده روزافزون از تکنیکهای فتوگرامتری مبتنی بر UAS مزایای قابلتوجهی در پایش زمینی در مقایسه با سایر تکنیکهای زمینی و هوابرد دارد. دوربینهای دیجیتال کمهزینه و کمهزینه با وضوح بالا و حدود ۱۸ تا ۲۴ مگاپیکسل را میتوان به راحتی بر روی پهپادها نصب کرد و تصاویر هوایی با کیفیت بالا از ارتفاعات پروازی مناسب تولید میکنند. سپس، تصاویر به دست آمده برای به دست آوردن داده های سه بعدی با چگالی بالا با نرم افزار فتوگرامتری کم هزینه، به عنوان مثال، Photomodeler Scanner [ 6 ]، Pix4D Mapper [ 7 ]، Agisoft PhotoScan [ 8 ]، یا با نرم افزار فتوگرامتری منبع باز، به عنوان مثال، ارزیابی می شوند. ، بازسازی سطح از تصاویر (SURE) [ 9 ]، یا استریو چند نمای مبتنی بر پچ (PMVS) [ 10] نرم افزار فتوگرامتری [ 11 ].
مزیت دیگر تصاویر با وضوح بالا، اطلاعاتی است که از استخراج خودکار ویژگی ها با استفاده از الگوریتم های تشخیص سطح پایین و سطح بالا مانند تشخیص گوشه، تشخیص لبه و تشخیص حرکت به دست می آید. الگوریتمهای تشخیص برای تصاویر انواع حسگرها در بسیاری از رشتهها اعمال میشوند. تصاویر دیجیتالی از طیف مرئی، تصاویر حرارتی، تصاویر تصویربرداری تشدید مغناطیسی (MRI) و تصاویر چند طیفی با وضوح بالا می توانند به عنوان منبع داده تشخیص خودکار در تحقیقات پزشکی، کشاورزی و باستان شناسی استفاده شوند [12 ، 13 ، 14 ]]. روشهای پردازش تصویر برای استخراج شکاف نیز نقش حیاتی به منظور بهبود تشخیص خودکار شکافهای زمین لغزش دارند. مشاركت جزئي كارهاي مربوطه با توجه به استخراج شكاف در اين بخش تشريح خواهد شد.
شکاف های سطحی شاخص های حیاتی برای درک و پیش بینی حرکات شیب هستند [ 15 ، 16 ]. بسیاری از محققین سعی کرده اند شکاف های زمین لغزش را توصیف و شناسایی کنند تا اطلاعاتی در مورد ارزیابی زمین لغزش ها ارائه کنند [ 17 ، 18 ]. در پنج سال گذشته، تکنیکهای فتوگرامتری مبتنی بر UAS برای مدلسازی مناسب زمین لغزشها اهمیت پیدا کردهاند. نیتامر و همکاران [ 19] شکاف ها و جابجایی ها را در سطح زمین لغزش با استفاده از تصاویر هوایی شناسایی کرد. با استفاده از مزایای ارتوفوتو می توان ساختارهای شکاف و بردارهای حرکتی را تعریف کرد. با این حال، تکنیکهای پردازش تصویر که استخراج و ارزیابی خودکار دادهها را فراهم میکنند، به اندازه کافی در تحقیق مورد استفاده قرار نگرفتند. وستوبی و همکاران [ 20 ] یک روش فتوگرامتری کم هزینه برای تولید یک مدل سطح دیجیتال بافتدار برای تجزیه و تحلیل اشکال مختلف زمین برای کاربردهای علوم زمین پیشنهاد کرد. هوگنهولتز و همکاران [ 21] همچنین استفاده از یک فرآیند فتوگرامتری مبتنی بر UAS را برای یک مدل زمین دیجیتال و برخی استخراجهای اولیه ویژگیهای شکل زمین، با استفاده از طبقهبندی نظارت شده حداکثر احتمال توضیح داد. استخراج ویژگیهای ژئومورفیک مبتنی بر سلول یا شطرنجی، نه تنها در شکلهای زمین، بلکه در زمین لغزشها برای کشف اشکال سطح قابل توجهی اعمال شد [ 22 ، 23 ].
تحقیقات علمی در مورد تجزیه و تحلیل زمین لغزش را می توان با استفاده از دو مقیاس مختلف مورد بحث قرار داد. آثار در مقیاس کوچک، مناطق وسیعی از زمین را پوشش میدهند و بیشتر بر تولید نقشههای حساسیت تمرکز دارند، در حالی که تحقیقات در مقیاس بزرگ از دادههای با وضوح بالا، مانند تصاویر UAS و دادههای LIDAR برای استخراج شکافهای ناشی از زمین لغزش استفاده میکنند. مطالعات برای مناطق وسیع، بر خلاف روشهای پیمایشی با دقت بالا، با استفاده از روشهای رگرسیونی و فازی با پیشبینیکنندههای بسیاری، مانند ارتفاع، شیب، جنبه، سنگشناسی، پوشش زمین، فاصله تا گسل، فاصله، کمی خطرات زمین لغزش را بهبود بخشیده است. به نهر و فاصله تا جاده [ 24 ، 25 ، 26 ، 27 ].
با این حال، این مطالعات محدود به یک مدل کلی بود که توضیحات محلی را با جزئیات برای مناطق در نظر نمی گرفت. با افزایش دسترسی به دادههای با وضوح بالا، با آخرین نسل UAS که تصاویر هوایی تقریباً 0.01 متر GSD ارائه میکند، نقشهبرداری خودکار ویژگیهای شکاف باریک امکانپذیر شده است. Stumpf و همکاران در مطالعات 2011 و 2013 [ 28 ، 29 ] استفاده از تکنیک عمدتاً خودکار برای نقشه برداری شکاف های سطح زمین لغزش از تصاویر هوایی با وضوح بسیار بالا را توضیح داد. در این تحقیق، الگوریتم های فیلتر و پس پردازش تصاویر فیلتر شده با داده های LIDAR موجود در هوا اجرا شد. در مطالعه 2012 Stumpf et al. [ 30]، یک رویکرد تشخیص خط چند مقیاسی با استفاده از عکسهای UAS به عنوان تنها ورودی، که در آن فیلتر همسان گاوسی (GMF) در ترکیب با اولین مشتق از یک گاوسی (FDOG) در نظر گرفته شد، توسعه یافت.
علاوه بر تحقیقات ذکر شده در بالا، که بر فتوگرامتری متمرکز شده است، LIDAR نیز به عنوان فناوری کلیدی برای نقشه برداری زمین لغزش در نظر گرفته می شود. Van den Eeckhaut و همکاران. [ 31 ] یک طبقهبندی مبتنی بر شی برای زمین لغزشهای مشتقات LIDAR برای درک فرآیندهای ژئومورفیک از امضاهای توپوگرافی پیشنهاد کرد. باروخ و فیلین [ 32 ] یک مدل مبتنی بر بهینه سازی مستقل برای استخراج و مشخصه یابی شکاف با استفاده از یک رویکرد چند مقیاسی ارائه کردند. رویکرد دیگری که توسط هوفل و همکاران معرفی شد. [ 33] روشی را برای ترسیم خودکار و توصیف ژئومورفومتریک شکاف ها در زمین های ذغال سنگ نارس تشریح کرد. این رویکرد یک گردش کار چند مرحلهای بود که بر اساس استخراج لبه شکاف و الگوریتم پر کردن سینک اعمال شده بر روی یک مدل زمین دیجیتالی شرطی شده بود. اگرچه LIDAR یک روش میدانی مناسب برای استخراج DTMها در تحقیقات شکاف است، اما اکتساب هوابرد به دلیل ارتفاع پرواز یا هزینه بالا دارای اشکالاتی است. علاوه بر این، تصاویر UAS اغلب به عنوان یک مجموعه داده مرجع با کیفیت بالا برای ارزیابی شکاف ها برای تعیین کمیت زمین لغزش استفاده می شود.
علیرغم وضوح کمتر در مقایسه با تصاویر UAS، تصاویر ماهواره ای و هوایی به عنوان منابع داده نیز برای استخراج شکاف توسط محققان مختلف مورد مطالعه قرار گرفته است [ 23 ، 34 ، 35 ، 36 ، 37 ، 38 ]. یوسف و همکاران [ 34 ] استفاده از تصاویر ماهواره ای با وضوح بالا را با استفاده از تصاویر QuickBird، که در 2 ژوئن 2007 به دست آمد (0.61 متر وضوح فضایی)، برای نقشه برداری دقیق از تحولات اخیر و مناطق خطر ناپایداری شیب نشان داد. شروتی و همکاران [ 35] مدل جنگلهای تصادفی را از یک تحلیل شی گرا با استفاده از تصاویر ASTER با وضوح متوسط به عنوان منبع اطلاعات تصویری، همراه با اطلاعات توپوگرافی استخراجشده از DEM ایجاد کرد. در سال 2015، شروتی و همکاران. [ 36 ] از تجزیه و تحلیل شی گرا نیمه خودکار برای تعیین کمیت تغییرات در مناطق فرسایش خندقی در طی یک دوره هشت ساله (2001 تا 2009) استفاده کرد. شروتی و همکاران [ 37 ] همچنین استفاده از تجزیه و تحلیل تصویر شی گرا را برای استخراج ویژگی های فرسایش، با استفاده از ترکیبی از اطلاعات توپوگرافی، طیفی، شکل (هندسی) و زمینه ای به دست آمده از تصاویر ماهواره ای بررسی کرد. Conoscenti و همکاران [ 38] توصیفی از شرایط حساسیت با استفاده از DEM و تصاویر هوایی برای فرسایش خندقی با استفاده از GIS و تجزیه و تحلیل آماری چند متغیره ارائه کرد. جدول 1 مقیاس ها، دقت ها و منابع داده برخی از تحلیل های علمی ذکر شده را خلاصه می کند.
جدول 1. محدوده برخی از آثار مرتبط.
هنگامی که آثار مرتبط در نظر گرفته می شود، برای استدلال هر گونه اطلاعات در مورد یک زمین لغزش از تجزیه و تحلیل مبتنی بر تصویر، به وضوح مشاهده می شود که استخراج ویژگی ها با دقت خاصی بر روی تصاویر اعمال می شود. فقدان یک رویکرد مدلسازی دادههای مناسب، دقت و قابلیت استدلال در مورد میدان لغزش را کاهش میدهد.
با توجه به حجم زیادی از داده های با وضوح بالا ارائه شده توسط UAS، این مطالعه بر توسعه یک تکنیک تجزیه و تحلیل تصویر خودکار برای حمایت از محققان زمین لغزش در تشخیص، نقشه برداری و شناسایی شکاف های سطح زمین لغزش از تصاویر UAS متمرکز شد. این مقاله دو روش شامل یکپارچهسازی و مدلسازی مجموعههای داده مبتنی بر سلول را برای نقشهبرداری شکافهای سطحی در طول بررسی دینامیک زمین لغزش ارائه و مقایسه میکند. در این مقاله، یک سیستم استنتاج فازی عصبی تطبیقی (ANFIS)، که هم شبکههای عصبی و هم اصول منطق فازی را ادغام میکند و یک رگرسیون منطقی (LR) که از روشهای آماری استفاده میکند، به منظور برآورد و اعتبار سنجی رابطه بین ویژگی های توپوگرافی وضوح، بر اساس ابرهای متراکم نقطه سه بعدی سطح زمین لغزش، و داده های تصویر. مدلهای پیشنهادی، با بهرهگیری از تصاویر UAS، بسیاری از پیشبینیکنندهها را حذف میکنند، برخلاف کار قبلی در زمینه لغزش حساسیت که در طیف وسیعی از زمینهها اجرا شده است. ضریب تعیین (R2 )، ریشه میانگین مربعات خطا (RMSE)، خطای استاندارد برآوردها (SEE) و منحنی عملیات گیرنده (ROC) به عنوان معیارهای ارزیابی برای ارزیابی و مقایسه نتایج تجربی ANFIS و LR با استفاده از مجموعه دادههای آموزشی و آزمون استفاده شد. این مقاله جریان کار را از ابتدا تا انتها با توجه به استخراج شکاف، که در نتیجه جابجایی زمین لغزش رخ داده است، پوشش می دهد. پس از اعتبارسنجی مدل، کافی بودن مجموعه دادههای تولید شده مبتنی بر UAS با وضوح بالا، مانند ابرهای نقطه سه بعدی، مشتقات مبتنی بر سلول آن، و عکسهای ارتو، برای مشخص کردن شکافهای زمین لغزش مورد بحث قرار میگیرند.
2. منطقه مطالعه
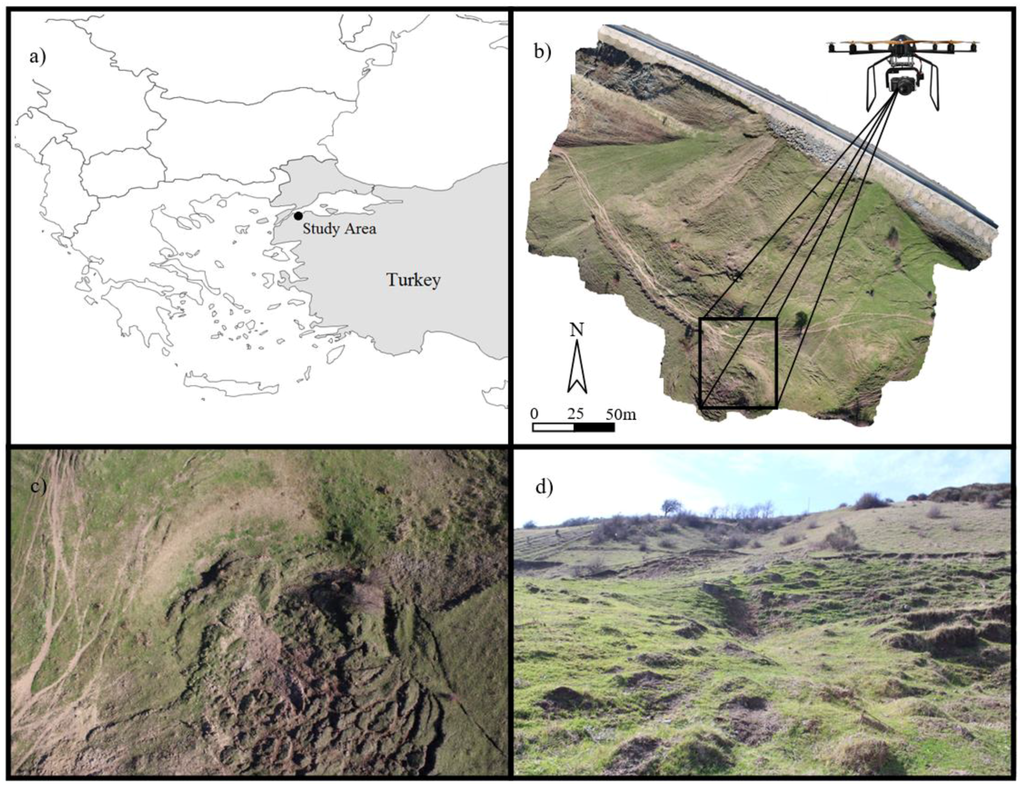
رویکرد پردازش در منطقه واقع در کنار روستای Sevketiye، استان Canakkale در ساحل جنوب غربی مرمره، ترکیه توسعه و آزمایش شد ( شکل 1 ). کل مساحت فعال زمین لغزش تقریباً 10 هکتار است. مختصات WGS84 UTM سمت چپ پایین منطقه 488,390 متر شرقی و 4,471,630 متر شمالی و سمت چپ WGS84 مختصات UTM بالای منطقه 488,590 متر شرقی و 4,471,830 متر شمالی است. بزرگراه بین شهری چاناک قلعه – بورسا از شمال با منطقه همسایه است و میانگین فاصله منطقه مورد مطالعه تا دریا حدود 150 متر است.
شکل 1. ( الف ) مکان محل مطالعه. ( ب ) عکس ارتوپتوی منطقه لغزش زمین و UAS با دوربین EOS M. ( ج ) یک تصویر هوایی از سطح زمین لغزش از UAS. و ( د ) یک تصویر زمینی از سطح زمین لغزش.
واحدهای زمین شناسی در زمین لغزش Sevketiye و نواحی اطراف آن از سنگ های رسوبی دگرگونی سن کرتاسه و ائوسن تشکیل شده است که در شکل 2 نشان داده شده است [ 39 ]. سنگ های زیرزمینی به طور نامتجانس با واحدهای رسوبی پوشیده شده اند. در منطقه، جنبشهای تودهای با توجه به واحدهای ماسهسنگ قهوهای مایل به زرد و کنگلومرا که به سازند فیچیتپه تعلق دارند، رخ داده است [ 40 ]. ماسهسنگهای سازند فیچی تپه عظیم و بهشدت سیمانی شدهاند. کنگلومرا در مقایسه با ماسهسنگها بهعنوان خاکستری-بژ تقویتکننده و غیرقابل توجه دیده میشود. واحدهای ماسه سنگ و کنگلومرا به صورت بین لایه ای مشاهده می شوند ( شکل 3 الف). ابعاد کنگلومراها بین 1 تا 15 سانتی متر است.شکل 3 ب). نمونههای بزرگی از برخی کنگلومراها شناسایی شدهاند زیرا بیشتر از قطعات کوارتز و سنگریزههای آتشفشانی تشکیل شدهاند.
شکل 2. نقشه زمین شناسی منطقه Sevketiye (اصلاح شده [ 39 ]).
شکل 3. ( الف ) ماسه سنگ و کنگلومرا سازند Fıçıtepe. و ( ب ) کنگلومرا با سیمان سبک (UTM 488541 متر شرق، 4471678 متر شمال).
این منطقه عمدتاً برای مقاصد کشاورزی توسط ساکنان مورد استفاده قرار می گیرد. با این حال، بر خلاف مناطق پایدار اطراف، سطح زمین لغزش تا حد زیادی توسط برخی از گیاهان بی ارزش پوشیده شده است که به طور وحشی و فراوان رشد می کنند. منطقه مورد مطالعه دارای آب و هوای انتقالی بین آب و هوای معتدل مدیترانه ای و آب و هوای معتدل اقیانوسی، با تابستان های گرم تا گرم، نسبتاً خشک و زمستان های خنک تا سرد و مرطوب است. با توجه به سرویس هواشناسی دولتی ترکیه (TSMS) [ 41 ]، دمای شدید در منطقه مورد مطالعه از 39.0 درجه سانتیگراد در جولای 2007 تا 11.2- درجه سانتیگراد در فوریه 2004 متغیر است. میانگین بارندگی سالانه منطقه مورد مطالعه 618 میلی متر بیشتر بود. دوره 1981 – 2014.
رانش زمین که اغلب در کنار بزرگراه در این منطقه رخ داده است، تا حدی باعث تغییر شکل در جاده شده است. علیرغم اینکه گزارش رسمی در مورد زمین لغزش هایی که طبق مشاهدات میدانی طی دو سال اخیر رخ داده است، وجود نداشته است، می توان این رانش زمین را کند حرکت دانست. از نظر دامنه پروژه تحقیقاتی که در بخش قدردانی نشان داده شده است، Erenoglu و همکاران. [ 42 ] تغییرات الکتریکی جانبی و عمودی سطح زیرین را به عنوان مشخصه لغزش شوکتیه تعریف کرد. آنها از روش مقاومت الکتریکی (ER) استفاده کردند که به عنوان یک روش رایج و اولیه برای بررسی زمین لغزش ها استفاده می شود [ 43 ]. در کار فوق الذکر [42 ]، 9 اندازه گیری توموگرافی پروفایل با حداقل فواصل الکترود 5 متر و طول پروفیل حداکثر 75 متر انجام شد. بر اساس بررسی های ژئوفیزیکی، منطقه نسبتاً کم عمق، با سطح آب زیرزمینی بالا و منطقه اشباع از آب، به ویژه در قسمت شمالی منطقه است. علاوه بر این، در حالی که تورم ها و ریزش ها از مکانی به مکان دیگر وجود دارد، امکان مشاهده ترک های سطحی با اندازه های مختلف وجود دارد که در مرزهای شیب باز می شوند. با توجه به اینکه وجود آب عامل مهمی است که باعث حرکت مناطق لغزش می شود، باید به منظور پایش فصلی واحدهای میدانی اشباع، که نشان دهنده رسانایی بالای منطقه و تغییرات مورفولوژیکی آن است، در نظر گرفته شود [42 ] . .
منطقه Sevketiye، که در شمال غربی منطقه مرمره، چاناکقلعه، ترکیه واقع شده است، بسیار نزدیک به گسترش ساروس ناحیه گسلی آناتولی شمالی (NAFZ) است که بهخوبی به عنوان برجستهترین سیستم گسلی فعال شناخته میشود. زلزله ازمیت در 17 آگوست 1999 تلفات جانی و خسارات قابل توجهی را در این منطقه به همراه داشت. NAFZ یک گسل عمودی راستلغز بزرگ است که حدود 1200 کیلومتر از تقاطع سهگانه کارلیوا (KTJ) در شرق ترکیه تا شمال دریای اژه امتداد مییابد و با حرکت به سمت غرب صفحه آناتولی نسبت به اوراسیا [ 42 ] 44 ، 45 ، 46 ].
3. فرآیند فتوگرامتری
فرآیند مورد استفاده برای این تحقیق UAS با استفاده از میکروکامپیوتر TurkUAV Octo XL بود ( شکل 1 ب). این وسیله نقلیه دارای هشت موتور و ملخ های آنها بود و می توانست دو کیلوگرم بار را حمل کند. باتری LiPo 14.8 ولتی 11000 میلی آمپر ساعتی، مدت زمان پرواز تا 18 دقیقه را ارائه می دهد. تصاویر هوایی توسط سیستم دوربین کامپکت Canon EOS M 18.0 MP گرفته شده است. از آنجایی که دوربینهای تک لنز رفلکس (SLR) دارای آینههایی بودند که نسبت به ارتعاشات حساستر بودند، سیستم فشرده EOS M برای پروژه انتخاب شد.
بیست و یک نقطه کنترل زمینی (GCPs) به طور دائم در اطراف سطح زمین لغزش ایجاد شد و مختصات GCPها با استفاده از دو گیرنده سیستم جهانی ناوبری ماهواره ای (GNSS) با استفاده از تکنیک Real Time Kinematic (RTK) اندازه گیری شد. مکانهای GCPها عمداً برای اطمینان از توزیع هرچه بهتر در سراسر منطقه مورد مطالعه انتخاب شدند، برای پایش زمانی زمین لغزش با استفاده از روشهای فتوگرامتری و ژئودتیکی در کمپینهای بررسی آینده. در شکل 4 ، تصاویر سمت چپ و بالا سمت راست گیرنده GNSS را در ایستگاه پایه نشان می دهند، در حالی که تصویر پایین سمت راست گیرنده مریخ نورد را در زمین لغزش Sevketiye نشان می دهد.
فتوگرامتری رابطه بین تصویر و جسم را با استفاده از هندسه تصویری برقرار می کند. فرآیند کالیبراسیون دوربین دیجیتال و فرآیند فتوگرامتری با استفاده از نرم افزار Photomodeler [ 6 ] انجام شد. برای تعیین موقعیت مکانی و جهت گیری دوربین در سیستم مختصات ژئودتیکی، جهت بیرونی توسط ایکس0،Y0،ز0ایکس0،�0،ز0به عنوان مختصات مراکز پرسپکتیو در سیستم مختصات ژئودزی و ω ، φ ، K�،�،Κسه زاویه تعریف شده مناسب است که چرخش سیستم مختصات تصویر را با توجه به سیستم مختصات ژئودتیکی بیان می کند. جهت بیرونی تصاویر که با نشان داده می شد ایکس0،Y0،ز0, ω , φ , Kایکس0،�0،ز0،�،�،Κ، در نرم افزار Photo Modeler با استفاده از ویژگی SmartMatch (SM) آن محاسبه شدند. قابلیت های SM Photo Modeler شامل یافتن نقاط مورد علاقه منحصر به فرد در تصاویر صحنه و تطبیق قوی آنها با نقاط متناظر در تصاویر از دیدگاه های مختلف است [ 47 ]. الگوریتم فرآیند فتوگرامتری اصلی با استفاده از تنظیم بسته نرم افزاری [ 48 ، 49 ، 50 ] محاسبه شد که پس از 85456 ویژگی که به طور خودکار در پروژه شناسایی شدند، تنظیم دقیق نامیده می شود. در نتیجه تنظیم بسته، موقعیت های دوربین در مرکز قرار می گیرند ایکس0،Y0،ز0ایکس0،�0،ز0، زوایای چرخش ω ، φ ، K�،�،Κ، و پارامترهای دوربین تصفیه شده به دست آمد [ 51 ].
شکل 4. ( الف ) گیرنده سیستم ماهواره ناوبری جهانی (GNSS) ایستگاه پایه. ( ب ) گیرنده GNSS ایستگاه پایه از زاویه دید متفاوت. ( ج ) گیرنده GNSS سیار در سطح زمین لغزش.
سپس مختصات تصویر GCP ها بر روی مدل فتوگرامتری اندازه گیری شد. در شکل 5 ، یک GCP با خطوط اپی قطبی نشان داده شده است که به بررسی دقت علامت گذاری GCP کمک می کند. شکل همچنین نشان می دهد که ریشه بالقوه میانگین مربع برای علامت گذاری در طول اندازه گیری 0.30 پیکسل بوده است. حداقل مقدار RMS 0.001 پیکسل و حداکثر مقدار RMS 2.921 پیکسل برای نقاط به طور خودکار شناسایی و مطابقت شده بود. علاوه بر این، مقادیر RMS مختصات تصویر GCPها از 0.086 تا 2.293 پیکسل در پروژه فتوگرامتری متفاوت است، همانطور که در جدول 2 مشاهده می شود.. مختصات GCPها، که دارای دقت ± 1 سانتی متر بودند، برای تعریف تبدیل مختصات هلمرت هفت پارامتری از سیستم مختصات مدل به سیستم مختصات ژئودتیکی استفاده شدند.
در جدول 2 ، نتایج نشان می دهد که بزرگی برداری تفاوت بین مختصات GPS و مختصات فتوگرامتری از 15 میلی متر تا 122 میلی متر متغیر است.
پس از تنظیم باندل بلوک و تبدیل مختصات، مختصات ژئودتیکی مراکز نمایش دوربین ها به دست آمد. میانگین مقدار مختصات Z مراکز پروجکشن حاکی از میانگین ارتفاع پرواز پهپاد است که در پروژه میانگین ارتفاع پرواز 132 عکس 58 متر از سطح دریا تعیین شد.
ابرهای نقطه سه بعدی با استفاده از تکنیک Multi-View Stereo (MVS) [ 52 ] تولید شدند. این تکنیک خروجی را از تنظیم بسته می گیرد و یک تطابق را برای استخراج ابرهای نقطه متراکم سه بعدی انجام می دهد [ 53 ]. پس از حل هندسه سه بعدی شکل سطح و پارامترهای جهت گیری عکس ها، عکس ارتوفتو با وضوح فضایی 3 سانتی متر بر پیکسل تولید شد. این یک طرح راستنویسی از عکسها با حذف اعوجاج پرسپکتیو است که برای منطقه لغزش بهدست آمد ( شکل 1 ب) [ 54 ].
شکل 5. خطوط اپی قطبی موقعیت احتمالی یک نقطه کنترل زمینی (GCP) را در طول علامت گذاری پیش بینی می کند.
جدول 2. دقت فتوگرامتری GCP ها و تفاوت های اندازه گیری بین GPS و فتوگرامتری.
4. گردش کار برای یادگیری ماشین
نگاشت حساسیت به زمین لغزش خطر فضایی را پیش بینی می کند که شامل مکان، حجم یا مساحت، طبقه بندی و سرعت زمین لغزش بالقوه، و هر گونه ماده جدا شده در نتیجه، و احتمال وقوع آنها در یک دوره زمانی معین [55] با ارزیابی داده های مربوطه می شود . از پارامترهای کمی یا کیفی مانند شیب، انحنا، سنگشناسی، نوع خاک، کاربری زمین، فاصله تا گسلها، فاصله تا جادهها، بارندگی و غیره انتخاب میشود .این پارامترها معمولاً به عنوان عوامل مرتبط با زمین لغزش برای تحقیقات در مقیاس کوچک تا متوسط در نظر گرفته می شوند. از آنجایی که سیستمهای هوایی بدون سرنشین (UAS) قادر به جمعآوری دادههای تصویری با وضوح بالا هستند، اکنون میتوان زمین لغزشها را با جزئیات برای مقیاسهای بزرگتر کاوش کرد. در این تحقیق، ویژگی های توپوگرافی به عنوان پارامترهای اصلی مربوط به زمین لغزش در نظر گرفته شد، در حالی که سایر متغیرها مانند سنگ شناسی، نوع خاک، کاربری اراضی، فاصله تا گسل ها، فاصله تا جاده ها و بارندگی برای مزارع حدود 1 کیلومتر مربع منسوخ شدند. تغییرات قابل توجهی در چنین مناطق باریکی انتظار نمی رود. در مدلسازی دادههای پیشنهادی، سه مجموعه داده، یعنی شیب، جهت، و مناطق یکنواخت بصری برای بررسی کفایت نماینده سازههای شکاف خطی، که در سطح زمین لغزش رخ داده بود، مورد مطالعه قرار گرفتند.شکل 6 کل گردش کار را از اکتساب داده تا مدل سازی داده، از جمله فرآیند فتوگرامتری و محصولات آن، و تناسب مدل را نشان می دهد.
در این مقاله، هم رگرسیون لجستیک دارای متغیرهای توضیحی چندگانه [ 56 ] و هم سیستم استنتاج فازی عصبی تاکاگی-سوگنو مرتبه اول [ 57 ] اجرا شد. سازندگان مدل یادگیری ماشین معرفی شده ارائه شده در این مقاله دارای سه پیش بینی هستند، ایکسمن n p u t= {ایکس1،ایکس2،ایکس3}ایکسمن�پتوتی={ایکس1،ایکس2،ایکس3}همانطور که در شکل 6 نشان داده شده است . مجموعه داده های مبتنی بر سلول نشان دهنده ویژگی های توپوگرافی، شطرنجی جنبه است ایکس1ایکس1، شطرنجی شیب ایکس2ایکس2، و شطرنجی نشان دهنده تغییر شکل های منطقه ای است ایکس3ایکس3، که لایه ورودی (لایه 1) برای ANFIS نامیده می شوند، در حالی که آنها را متغیرهای مستقل برای LR می نامند. متغیر وابسته ساختارهای شکاف خطی بود که از فتوگرامتری UAS تولید شد.
سه مجموعه داده که در پاراگراف های قبل ذکر شد به عنوان پیش بینی کننده ANFIS و LR پیشنهادی پذیرفته می شوند. نقشه جنبه و نقشه شیب به عنوان دو متغیر ورودی اتصالات مدل، به عنوان مجموعه داده های ارزیاب از ابر نقطه سه بعدی منطقه لغزش با استفاده از ابزار تحلیل فضایی نرم افزار ARCGIS به دست آمد. ویژگی های نقطه ابر نقطه فتوگرامتری به سلول های شطرنجی تبدیل شد که مقادیر آنها اطلاعات ارتفاع (Z) را نشان می دهد. میانگین حسابی مقادیر Z تمام نقاط متناظر در داخل هر سلول به عنوان ارتفاع به آن سلول اختصاص داده شد ( شکل 7 a). پس از آن، شیب به عنوان نرخ تغییر ارتفاع برای هر سلول ارتفاعی تعیین شد ( شکل 7ب). سپس، شطرنجی جنبه، جهت پایین شیب حداکثر نرخ تغییر در مقدار را از هر سلول به همسایگان آن شناسایی کرد ( شکل 7 ج).
سومین متغیر ورودی، تغییر شکلهای ناحیهای، بهطور خودکار با استفاده از الگوریتم مناطق خارجی پایدار حداکثر (MSER) برآورد شد [ 58 ]. مناطق صرفاً با ویژگی خارجی تابع شدت در منطقه و در مرز بیرونی آن تعریف شدهاند. شکستگی هایی که در سطح زمین لغزش رخ داده است باعث ایجاد آثار طبیعی منطقه ای روی ارتوفوتوهایی شده است که تولید شده است. از آنجایی که ردهای منطقه ای روی ارتوفوتوها عمدتاً به دلیل کسری رخ می دهد، MSER به طور قابل توجهی وجود شکاف را نشان می دهد. درصد مناطق MSER، از جمله یک پیکسل متعلق به یک شکاف و همسایگی هشتگانه آن، شصت و یک درصد بود که یک مقایسه مبتنی بر سلول بین تصویر MSER و ویژگیهای شکاف دیجیتالی تصاویر استریو انجام شد (شکل 7) .د).
شکل 6. جریان پردازش داده ها.
ویژگیهای شکاف که نشاندهنده متغیر وابسته LR است که متغیر خروجی ANFIS نیز نامیده میشود، از تصاویر استریو سطح زمین لغزش بهدست آمد. بیست و هشت پروفیل مختلف که عمداً ساختارهای شکاف آشکار را قطع میکردند به طور تصادفی در اطراف منطقه لغزش تعیین شدند. تنها 10 نمایه از 28 نمایه برای سادگی در شکل 8 نشان داده شده است. مقادیر پایینتر عکسهای ارتوفوتو در مقیاس خاکستری با ساختار شکاف مطابقت دارد و به شدت با همسایگیهای روشنتر آنها تضاد دارد، همانطور که در تمام پروفایلها دیده میشود.
در این بخش، رابطه بین متغیرهای ورودی مورد بحث قرار می گیرد. مقادیر مبتنی بر سلول شیب، جنبه، مناطق MSER و عکسهای ارتوفتو در امتداد نمایه 6، در شکل 9 نشان داده شدهاند . تمام گرافیک ها با مقیاس بندی بین 0 و 1 برای ارتباط صحیح متغیرهای مختلف نرمال سازی شدند. کمترین مقدار ارتوفوتوهای یک پروفیل به صورت خط قرمز بریده بریده همانطور که در شکل 9 مشاهده می شود نشان داده شده است ، زیرا مقادیر خاکستری پایین ارتوفوتوها عمیقاً بر ساختارهای شکاف دلالت دارند. در ردیف اول شکل 9 ، سلول های شیب به وضوح پروفیل هایی را نشان می دهند که در زاویه درجات بالا در سراسر شکاف به آن رسیده اند.
ردیف دوم شکل 9 نشان میدهد که مقادیر ابعاد پروفیلها عمدتاً در حدود 0 یا 1 قرار دارند. مقادیر حداقل و حداکثر، 0 و 1، که از شطرنجی با دامنه 0-360 درجه نرمال شدهاند، جهت شمال را نشان میدهند. از آنجایی که جهت حرکت اصلی زمین لغزش شمال شرقی بود، پروفیل ها در ساختار شکاف حدود 0 هستند. از سوی دیگر، نواحی MSER به عنوان سومین متغیر ورودی در نظر گرفته شد تا نواحی دارای شکاف را از میدان های دست نخورده تشخیص دهد. ارقام MSER ظاهراً نشان میدهند که مقادیر خاکستری تیرهتر با مناطق MSER مرتبط است.
شکل 7. ( الف ) شطرنجی ارتفاعی. ( ب ) شطرنجی شیب; ( ج ) شطرنجی جنبه. و ( د ) مناطق خارجی با حداکثر پایداری (MSER).
علاوه بر بازرسی پروفیل ها، هیستوگرام های ناحیه مربعی که نمایه 6 را در شکل 9 احاطه کرده است نیز برای هر ورودی در نظر گرفته شد. در شکل 9هیستوگرام شیب که دارای پنج گروه رخداد مجزا بود، مقادیر شیب زیاد را در گروه پنجم در حدود 0.75 نشان می دهد. هیستوگرام جنبه در حدود مقادیر 0.2 و 0.3 تشدید شد. مخصوصاً شکافهایی که در حالت شطرنجی بهعنوان نواحی مرتبط با شکاف با مقادیر ابعادی حدود 0.2 قابل تشخیص هستند. نواحی MSER که به صورت مقادیر تیرهتر نشان داده میشوند، حول مقدار 0 جمع میشوند. در ارتوفوتو، ناحیه شکاف تصویر به صورت یک ناحیه سیاه ظاهر میشود، بنابراین، هیستوگرام عکسهای ارتوفوتو تجمع کوچکی را بین مقادیر 0 و 0.2 نشان میدهد. با وجود این، هیچ تصادف دقیقی بین عکسهای ارتوفتو و رسترهای ورودی مشاهده نشد. وجود برخی تمایزات در شطرنج های ورودی در اطراف ناحیه شکاف مشاهده می شود.
شکل 8. نشان دادن چند پروفیل که شکستگی های اطراف سطح زمین لغزش را قطع کرده اند.
جدول 3 کلاس های هر لایه داده ورودی، تعداد پیکسل های کلاس ها و تعداد رخدادهای شکاف متعلق به کلاس ها را نشان می دهد. از کلاس ها برای پیاده سازی مدل های ANFIS و LR استفاده شد. هر دو ورودی جنبه و ورودی MSER به دو کلاس به عنوان ویژگی های 1 و 2 خوشه بندی شدند، در حالی که شیب ها به عنوان داده های پیوسته بین فواصل 0-1.00 در نظر گرفته شدند. با وجود این، وجه دارای نه وجه (مسطح، شمال شرقی، شرقی، جنوب شرقی، جنوب، جنوب غربی، غرب و شمال غربی) بود.
مقدار میانگین دادههای جنبه مجموعه داده آموزشی که در آن شکافها رخ داده است، 26/48 درجه محاسبه شد که نشان میدهد شمال شرقی تقریباً جهت حرکت اصلی زمین لغزش بوده است. علاوه بر این، مقادیر پیکسلی که با ساختار شکافی مواجه نشدند، در یک توزیع همگن در همه جهات به جز شمال شرق مشاهده شدند. بنابراین، دسته اول جنبه بین 0 تا 90 درجه و سایر جهت ها (بین 90 تا 360 درجه) به عنوان دسته دوم پذیرفته شدند. از سوی دیگر، دادههای MSER در مجموعه داده آموزشی در دو مرکز متضاد انباشته شدند که مرکز اول صفر و مرکز دوم یک بود. به همین دلیل، تمام پیکسل هایی که کمتر از مقدار 0.5 بودند به عنوان یک منطقه از شطرنجی منطقه MSER تعریف شدند، در حالی که سایر پیکسل ها (>
4.1. مدل سازی فازی عصبی تطبیقی: تحلیل ANFIS
با استفاده از یک مجموعه داده ورودی/خروجی داده شده، ANFIS یک سیستم استنتاج فازی (FIS) ساخت که پارامترهای تابع عضویت آن با استفاده از یک الگوریتم انتشار معکوس، در ترکیب با روش حداقل مربعات تنظیم شدند. همانطور که در شکل 10 نشان داده شده استویژگیهای سیستم استنتاج فازی عصبی تطبیقی که برای ورودیها و خروجیهای مذکور اعمال شد، در قسمت قبل به تفصیل توضیح داده شده است. یک ساختار استنتاج فازی اولیه در لایه فازی سازی (لایه 2) ANFIS تعیین شد. به منظور نمایش تمام دادهها در تعداد متوسطی از قوانین، دو تابع عضویت زنگشکل تعمیمیافته (همچنین به عنوان تابع عضویت کوشی شناخته میشود) با استفاده از معادله (1)، به مجموعه دادههای ورودی جنبه و MSER و پنج زنگ تعمیمیافته اختصاص داده شد. همانطور که در جدول 4 مشاهده می شود، توابع عضویت شکل به مجموعه داده ورودی شیب اختصاص داده شده است . در حالی که یک تابع عضویت خطی با استفاده از روش پارتیشن شبکه به داده های خروجی اختصاص داده شده بود. در معادله (1)، μ ( x) تابع عضویت زنگی شکل تعمیم یافته را نشان می دهد، در حالی که پارامتر c مرکز منحنی و پارامترهای a و b عرض منحنی را مشخص می کند.
شکل 9. نمایش پروفیل هایی که شکستگی ها را در اطراف سطح زمین لغزش قطع کرده اند.
جدول 3. خلاصه لایه های داده ورودی.
شکل 10. شبکه سیستم استنتاج فازی عصبی تطبیقی (ANFIS) پیشنهادی.
جدول 4. توابع عضویت برای لایه های داده ورودی.
جدول 5. خلاصه ANFIS پیشنهادی.
بخش مقدماتی قوانین، که به عنوان ترکیبات فازی نیز شناخته میشود، در لایه 3 با استفاده از هنجار t-ضابطه (هنجار مثلثی) محاسبه شد (معادلات (2) – (4)). بیست گره خروجی، که نشان دهنده قدرت شلیک قوانین فازی مربوطه است، به دست آمد. در لایه 4، هر گره نسبت قدرت شلیک قانون i-ام را به مجموع قدرت شلیک تمام قوانین محاسبه می کند که به آن نرمال سازی قدرت قانون نیز گفته می شود، همانطور که در رابطه (5) توضیح داده شده است. لایه 5، به عنوان لایه قانون بعدی، هر گره خروجی لایه 4 را با تابع گره نشان می دهد و p، q، r و s پارامترهای تابع گره هستند همانطور که در رابطه (6) نشان داده شده است. هشتاد پارامتر خطی قاعده نتیجه را می توان با استفاده از الگوریتم حداقل مربع تعیین کرد. در لایه استنتاج قانون (لایه 6)، همانطور که در رابطه (7) نوشته شده است،جدول 5 .
سه زیر گروه در نواحی شکاف به طور جداگانه در قالب مجموعه داده های آموزشی، آزمایشی و بررسی از سلول های مربوط به تصاویر ورودی و خروجی به دست آمد. هر مجموعه داده آموزشی برای ANFIS شامل یک ترکیب ورودی-خروجی 914 بود که چندین برابر بیشتر از تعداد کل پارامترها بود (107 عدد تخمین زده شده است). یادگیری ANFIS پارامترهای تابع عضویت را با روش الگوریتم ترکیبی بهروزرسانی میکند که شامل انتشار برگشتی برای پارامترهای تابع عضویت ورودی و تنظیم حداقل مربع برای پارامترهای تابع خطی است. در گذر رو به جلو، پارامترهای غیر خطی ثابت و پارامترهای تابع خطی با استفاده از حداقل مربع محاسبه شدند، در گذر رو به عقب، پارامترهای تابع خطی ثابت و پارامترهای غیر خطی با استفاده از انتشار برگشتی محاسبه شدند.جدول 6 نتایج RMSE (معادله (8)) و ضریب تعیین را توضیح می دهد. این در پایان 35 دوره آموزشی یادگیری ANFIS به عنوان R-squared (معادله (9)) نیز شناخته شد. در این تحقیق تحلیل های ANFIS با استفاده از نرم افزار برنامه نویسی متلب انجام شد.
جدول 6. خلاصه معیارهای آماری RMSE و R 2 مدل ANFIS.
4.2. مدل آماری: تحلیل رگرسیون لجستیک
رگرسیون لجستیک که مدل لاجیت نیز نامیده میشود، برای مدلسازی متغیرهای نتیجه دوگانه استفاده شد. در مدل لاجیت، شانس ورود به سیستم به صورت ترکیبی خطی از متغیرهای پیشبین مدلسازی شد (معادله (10)). در معادله (10) β0�0نشان دهنده رهگیری، در حالی که β1،β2،β3�1،�2،�3سه ضریب متغیرهای پیش بینی کننده را نشان می دهد. متغیرهای پیش بینی کننده ایکس1،ایکس2،ایکس3ایکس1،ایکس2،ایکس3استفاده شد، همانطور که در همان ترتیب تعریف شده است، که در جدول 3 آورده شده است . حداکثر احتمال (ML) راهی برای یافتن کوچکترین انحراف ممکن بین مقادیر مشاهده شده و پیش بینی شده، به ویژه با استفاده از مشتقات y است. در این تحقیق، وقوع رویداد با وجود شکاف در یک پیکسل نشان داده شد و از رگرسیون لجستیک برای پیشبینی یک متغیر باینری که میتواند برابر با 1 (وجود شکاف) یا 0 (عدم شکاف) باشد، استفاده شد. در این مطالعه، تحلیلهای رگرسیون لجستیک با نرمافزار آماری R [ 59 ] انجام شد که امکان تعریف متغیر توضیحی طبقهای را فراهم کرد.
برازش مدل رگرسیون با داده های مشاهده شده از مجموعه داده های آموزشی پروفایل ها به صورت کمی با انحراف صفر ارزیابی شد. Dn u l l��تولل، انحراف مدل Dچند روز _e l�متر�دهل، مربع کای χ2�2و آمار شبه R 2 . انحراف صفر Dn u l l��توللبا مقایسه مدل صفر با مدل نظری (که به عنوان مدل اشباع نیز شناخته می شود)، انحراف مدل، 630.20 محاسبه شد. Dچند روز _e l�متر�دهلبا مقایسه مدل کامل، شامل همه پیش بینی کننده ها با مدل نظری، در حالی که کای اسکوئر 340.57 محاسبه شد. χ2�2با استفاده از رابطه (11) 289.63 تعیین شد. مجموعه پیشبینیکنندهها بهطور قابلتوجهی برازش مدل را بهبود بخشیدند که میتوان از نتایج رگرسیون نتیجهگیری کرد، زیرا انحراف مدل به طور قابلتوجهی کوچکتر از انحراف صفر است. مدلهای متناسب با دادههای مشاهدهشده را نیز میتوان با سه متغیر محاسباتی شبه R2 مختلف ، به جای مربعهای R تنظیمشده در مورد مدل رگرسیون خطی چندگانه، علاوه بر آمار ارزیابی کرد.– 2 لیتر لیتر–2��. نتایج شبه R 2 مک فادن، کاکس و اسنل، و ناگلکرکه به ترتیب 0.4596، 0.4694 و 0.6274 به دست آمد. مقادیر حدود 0.5 از این پارامترهای Pseudo-R 2 نشان دهنده تناسب معنی دار آماری مدل لاجیت با داده های آموزشی است.
جدول 7 ضرایب به دست آمده، نتایج آزمون والد و مقادیر p را برای پیش بینی کننده ها پس از اجرای رگرسیون لجستیک توضیح می دهد. مطابق جدول 7 ، ضریب شیب نشان می دهد که به ازای هر 1 واحد افزایش در مقدار شیب، logit احتمال وقوع شکاف 6.1726 افزایش می یابد. از آنجایی که تمام مقادیر p بسیار کوچک هستند، متغیرهای پیش بینی مقدار قابل توجهی از انحراف را توضیح می دهند.
جدول 7. β�ضرایب، آزمون والد و مقادیر p برای پیش بینی کننده ها.
5. نتایج
5.1. اثر ابر نقطه ای فتوگرامتری
از آنجایی که استفاده از اطلاعات توپوگرافی با وضوح بالا برای استخراج ویژگیهای زمین لغزش با استفاده از مدلهای پیشنهادی بسیار مهم است، نتایج ابر نقطهای در این بخش توضیح داده شد. نتایج این تحقیق نشان می دهد که با استفاده از 132 عکس هوایی بیش از 12 میلیون نقطه سه بعدی تولید شده است. شکل 11چگالی محلی ابرهای نقطه را با نمایشگر از 0 تا 5500 نقطه نشان می دهد. چگالی ابر نقطه ای، نمایش دقیق تفاوت ارتفاع سطح زمین را با میانگین 14.87 نقطه در محله نقطه برای استفاده در تجسم و تجزیه و تحلیل، امکان پذیر کرد. چگالی با شمارش، برای هر نقطه، تعداد همسایگان در داخل کره ای به شعاع 0.5 متر تخمین زده می شود. تراکم نقطه بالاتر تمایل به افزایش همپوشانی بین تصاویر دارد. علاوه بر همپوشانی، دومین عامل مهم وجود مکانهایی است که ویژگیهای آنها (مثلاً شکل، رنگ، بافت) به گونهای است که میتوان آنها را در تضاد شناسایی کرد و امکان ایجاد تطابق یا مطابقت را فراهم کرد.
همانطور که در شکل 11 نشان داده شده است، چهار منطقه (از منطقه یک تا منطقه چهار) که در نقاط کم تراکم قرار دارند، و چهار منطقه (از منطقه پنج تا منطقه هشت) که در نقاط با تراکم بالا قرار دارند، انتخاب شدند. نقشههای وقوع شکاف مدلهای ANFIS و LR در هشت منطقه به منظور تعیین شباهتهای بین تصاویر با استفاده از شاخص تشابه ساختاری (SSIM) [ 60 ] با یکدیگر مقایسه شدند . این بر اساس محاسبه سه عبارت است – عبارت روشنایی، ترم کنتراست و اصطلاح ساختاری. شاخص کل به صورت ترکیبی ضربی از سه عبارت محاسبه می شود (معادله (12)).
جایی که μایکس�ایکس، μy��، σایکس�ایکس، σy ��، و σx y�ایکس�به ترتیب میانگین محلی، انحراف استاندارد و کوواریانس متقاطع برای تصاویر نقشه هستند. ج1ج1و ج2ج2مقادیری هستند که با استفاده از محدوده دینامیکی تصاویر محاسبه می شوند. نتیجه شباهت بین دو مدل پیشنهادی با توجه به هشت منطقه در جدول 8 مورد بررسی قرار گرفت . نتایج به وضوح نشان میدهد که مقادیر شاخص شباهت بهدستآمده در مناطقی که چگالی نقطهای بیشتر دارند، بالاتر بود. با توجه به افزایش شاخص تشابه در مکانهای تراکم نقطه بالا بین مدلهای پیشنهادی، چگالی نقطه یک عامل حیاتی از نظر ارائه محصولات سازگار است. فتوگرامتری UAS یک روش ضروری کم هزینه برای به دست آوردن ابرهای نقطه ای با چگالی بالا برای اهداف بررسی زمین لغزش است.
شکل 11. هشت منطقه بر روی نقشه چگالی ابر نقطه ای در یک کره شعاع 0.5 متری.
جدول 8. شاخص های تراکم نقطه ای و شباهت بین نقشه های شکاف ANFIS و رگرسیون لجستیک (LR) در هشت منطقه.
5.2. نتایج آزمون های معناداری برای پارامترهای مدل
علاوه بر سه پارامتر شیب، جنبه و MSER مورد استفاده در مدل پیشنهادی، چندین عامل محرک زمین لغزش با توجه به شرایط محیطی در طول فرآیند نقشه وقوع شکاف زمین لغزش مورد تجزیه و تحلیل قرار گرفت. آزمون مک نمار [ 61 ] ارزیابی را بر اساس توزیع کای دو استوار می کند
که در آن fمن ج�من�نشان دهنده فراوانی سایت هایی است که در عنصر ماتریس سردرگمی قرار دارند من ، جمن،�(معادله (13)). در معادله (13)، زمانی که دو الگوریتم یادگیری ماشین مدل میشوند منمنو j�مقایسه می شوند، منمنمدل LR -ام تعداد طبقه بندی پیکسل های نادرست را نشان می دهد در حالی که j�مدل LR -ام تعداد طبقه بندی پیکسل های واقعی را برای هر کدام نشان می دهد fمن ج�من�. مقادیر به دست آمده با مقادیر مجذور کای جدول بندی شده برای نشان دادن اهمیت آماری آن مقایسه می شوند [ 62 ]. پنج عملکرد مدل LR که دارای تعداد پارامترهای متفاوتی هستند با آزمون مک نمار در جدول 9 مقایسه شد . مطابق جدول، مدل یک تنها با شیب و جنبه به عنوان پارامتر اجرا شد، در حالی که مدل 5 با شیب، جهت، MSER، شاخص توان جریان (SPI)، شاخص رطوبت توپوگرافی (TWI) و انحنا انجام شد. مقادیری که زیر مقدار بحرانی 3.84 برای فاصله اطمینان 95% هستند در جدول 9 به صورت پررنگ نشان داده شده است.. این نشان می دهد که بیش از سه پارامتر تغییرات ناچیز را در بین مدل ها نشان می دهد. به عبارت دیگر، دقت نقشههای وقوع شکاف با چهار، پنج یا شش پارامتر، نتایج آماری بسیار مشابهی را نشان میدهد. نتایج آزمون مکنمار نشان میدهد که افزایش ابعاد مجموعه دادهها از نظر آماری غیرمعنیدار است و SPI، TWI و مشخصات انحنای بهویژه با در نظر گرفتن همه ترکیبهای آزمایششده در مطالعه، کمتاثیرترینها هستند. این رفتار را می توان با پدیده هیوز یا نفرین ابعادی در ادبیات [ 63 ] توضیح داد. عملکردهای مدل ANFIS، که دارای تعداد پارامترهای متفاوتی هستند، با نتایج آزمون LR McNemar منسجم بودند.
علیرغم بسیاری از پارامترهای دیگر مانند انحنا، شاخص توان جریان و شاخص رطوبت توپوگرافی که در برخی از مطالعات علمی به منظور تهیه نقشه های حساسیت زمین لغزش استفاده شده است، استفاده از تمام پارامترهای موجود به احتمال زیاد به عنوان اطلاعات همبسته و اضافی در نظر گرفته می شود. که ممکن است دقت نقشه حاصل را کاهش دهد. نتایج روش رگرسیون لجستیک و سایر الگوریتمهای یادگیری ماشین نشان میدهد که افزایش تعداد عوامل محرک، دقت نقشههای حساسیت زمین لغزش را تا حد معینی بهبود میبخشد. اما پس از یک سطح بحرانی، دقت روند نزولی را نشان می دهد.
جدول 9. نتایج آزمون های مک نمار محاسبه شده با نقشه های وقوع شکاف LR.
5.3. اعتبار سنجی نقشه های وقوع شکاف
منحنیهای مشخصه عملکرد گیرنده (ROC) که دقت دادههای آموزشی و آزمایشی مدلهای وقوع شکاف را نشان میدهد، برای هر دو مدل ANFIS و مدل LR، همانطور که در شکل 12 نشان داده شده است [64] ارائه شده است .]. نمودارهای شکل، مختصات X و Y منحنی های ROC را با رسم حساسیت، که به عنوان نرخ مثبت واقعی (TPR) در برابر ویژگی نیز شناخته می شود، که به عنوان نرخ مثبت کاذب (FPR) نیز شناخته می شود، برمی گرداند. بهترین روش پیشبینی ممکن نقطهای را در گوشه بالا سمت چپ یا مختصات (0،1) فضای ROC به دست میدهد که نشاندهنده 100٪ حساسیت (بدون منفی کاذب) و 100٪ ویژگی (بدون مثبت کاذب) است. سطح زیر منحنی (AUC) بین 0 و 1 متغیر بود که 1 کامل بود و 0.5 یک تقریب تصادفی را تعریف می کرد. مقادیر AUC متعلق به مجموعه داده های آموزشی و آزمایشی برای مدل ANFIS بود و به ترتیب 9292/0 و 8835/0 محاسبه شد که در شکل 12 نشان داده شده است.a، در حالی که مقادیر AUC مجموعه داده های آموزشی و آزمایشی، که در مدل پیشنهادی LR پیاده سازی شدند، به ترتیب 9153/0 و 8795/0 تعیین شدند. مقادیر AUC ROCها نشان داد که هر دو مدل نتایج تولید شده از نظر میانگین دقت به یکدیگر نزدیک هستند.
شکل 12. ( الف ) منحنی های مشخصه عملکرد گیرنده (ROC) ANFIS و ( ب ) منحنی های ROC LR.
5.4. مقایسه نقشه های وقوع شکاف
شکل 13 نقشههای وقوع شکاف حاصل از هر دو مدل ANFIS و LR را توضیح میدهد. تصویر نقشه شکاف 13d از میدان تحقیق با استفاده از مدل ANFIS استنباط شد، در حالی که تصویر نقشه شکاف 13e با استفاده از مدل LR محاسبه شد. دو ناحیه مربع در میدان بزرگنمایی شدند تا تصاویر UAS فتوگرامتری، شکل 13 b,g، میدان با وقوع شکاف مقایسه شوند. دو ناحیه نمونه عمداً در مکانهایی که دارای شقاق نادر بودند برای تشخیص تفاوتهای بصری خاص انتخاب شدند. هنگامی که شکل 13a-c مورد بررسی قرار گرفت، استخراج شکاف خطی، که 4.91 متر طول داشت، شناسایی شد، همانطور که در نقشه های ANFIS و LR بزرگنمایی شده مشاهده می شود. دومین ساختار شکاف متمرکز، که 5.66 متر بود، و دو شکاف مفصلی به طول 9.24 به صورت فتوگرامتری در شکل 13 g نشان داده شده است، در مدل های پیشنهادی، همانطور که در شکل 13 f,h نشان داده شده است، شناسایی شدند.
شکل 13. ( الف ) منطقه مربع 1 در نتیجه ANFIS بزرگنمایی شد. ( ب ) اندازه گیری فتوگرامتری مساحت مربع 1 در تصویر UAS. ( ج ) ناحیه مربع 1 در نتیجه LR بزرگنمایی شد. ( د ) نقشه شکاف ANFIS. ( ه ) نقشه شکاف LR LR. ( f ) ناحیه مربع 2 در نتیجه ANFIS بزرگنمایی شد. ( g ) اندازهگیریهای فتوگرامتری مساحت مربع 2 روی تصویر UAS. ( h ) ناحیه مربع 2 در نتیجه LR بزرگنمایی شد.
6. نتیجه گیری نکات
در جریان کاری پیشنهادی، UAS برای جمعآوری دادههای با وضوح بالا بسیار مهم است، در حالی که یک دوربین هوایی در هواپیما مأموریتها را گران میکند. علاوه بر این، یک دوربین هوایی فتوگرامتری تجاری با توجه به ارتفاع پرواز خود، حداکثر تصاویر 5 سانتی متری GSD را ارائه می دهد. UAS که مزیت پرواز در ارتفاع کم را دارد، در مقایسه با مانیتورینگ هوایی با هواپیما، یک فناوری ارزان قیمت است و تصاویر زیر 1 سانتی متر GSD را ارائه می دهد. همانطور که در جدول 2 مشاهده می شود، دقت XYZ تمام GCPهای اندازه گیری شده بر روی تصاویر UAS کمتر از 1 سانتی متر بود.. مقایسه بین اندازهگیریهای GPS و اندازهگیریهای فتوگرامتری نیز نتایج رضایتبخشی را نشان میدهد. میانگین مقادیر اختلاف مطلق بین دو اندازه گیری 26 میلی متر در جهت X، 38 میلی متر در جهت Y و 28 میلی متر در جهت Z بود. تفاوت مختصات ممکن است با تجمع بسیاری از منابع خطا، مانند خطاهای اندازه گیری RTK، خطاهای اندازه گیری فتوگرامتری، خطاها در هنگام قرار دادن هدف GCP روی زمین و خطاهای تبدیل مختصات رخ داده باشد. نتایج به وضوح نشان می دهد که فتوگرامتری UAS یک تکنیک مناسب برای پایش زمین لغزش ها و تغییرات دوره ای مورد انتظار آنها بیش از 5 سانتی متر است.
مجموعه داده های جغرافیایی مرجع مبتنی بر سلول با وضوح بالا، پتانسیل قابل توجهی برای مدل سازی زمین لغزش دارند. این به ویژه در مورد فتوگرامتری صدق می کند، که قادر است مجموعه داده های سریع و دقیقی را ایجاد کند که نشان می دهد در کجا شکاف هایی در سطح زمین لغزش رخ داده است، که به شدت به ارتفاع، جنبه و شیب مرتبط هستند. وزن ویژگی های توپوگرافی در مدل سازی شکاف ناحیه زمین لغزش در این تحقیق در نظر گرفته شده است. با این حال، ویژگی های توپوگرافی متغیرهای ورودی کافی برای تشخیص شکاف نیستند. یک محدودیت بصری، یا یک متغیر حامی بصری مانند الگوریتم منطقه MSER، همانطور که در این کار استفاده میشود، کمکی به مدل دادهها میکند. مناطق MSER به عنوان یک الگوریتم استخراج منطقه نیز به ورودی های ANFIS و LR اضافه شده است.
با این حال، در طول مدلسازی ANFIS و LR، چالش اصلی تعیین یک مجموعه داده خروجی آموزشی و آزمایشی مناسب بود که شکافها را نشان دهد. برای ارائه اتوماسیون کامل، میتوان از عکسهای ارتوفوتو با وضوح بالا به عنوان جایگزینی برای استخراج شکاف برای دادههای آموزشی و آزمایشی استفاده کرد. مزیت فرآیند تمام اتوماتیک استخراج شکاف که به دلیل تغییر مقدار خاکستری نشان دهنده ساختار شکاف بود، می تواند به عنوان یک ابزار مفید در بین روش های مدل سازی شکاف در نظر گرفته شود. نتایج تمام مجموعههای داده، دادههای آموزشی، دادههای بررسی و دادههای آزمایشی، علیرغم مجموعههای داده، خطاهای متوسطی را نشان میدهند، که ممکن است شامل برخی از خطاهای اشتباه در هنگام بررسی پروفایلهای تولید شده بهطور تصادفی از مجموعه دادههای شطرنجی باشد.
از آنجایی که ارتفتو یک مجموعه داده کلیدی است که برای تولید داده های MSER ضروری است، وضوح آن به طور مستقیم با عملکرد آموزشی ANFIS و LR درگیر است. هر چه رزولوشن ارتوفتو بالاتر باشد به این معنی است که مجموعه داده های مبتنی بر سلول برای استفاده در ANFIS به عنوان متغیر دقیق تر است. با این حال، هر چه وضوح تصویر ارتوفتو بالاتر باشد، به این معنی است که وظایف محاسباتی به دلیل دادههای فشرده پیچیدهتر میشوند، که ممکن است در طول پیادهسازی در مدلهای ANFIS و LR مشکلاتی ایجاد کند. در کار آینده، بسته به رزولوشن های مختلف، عملکرد و نتایج ANFIS باید به طور عمدی مورد بحث قرار گیرد.
مدلسازی دادههای ANFIS و LR جدید، که گسترهای از مدل پیشنهادی است، با فرآیند بعدی جمعآوری دادههای فتوگرامتری به منظور تفسیر تغییرات زمین لغزش نیز اعمال خواهد شد. رابطه بین تشخیص خودکار تغییرات در سطح زمین لغزش و دادههای DEM و مشتقات آن احتمالاً با مدلسازی دادههای منطقی توضیح داده میشود. در این تحقیق، تصاویر در مقیاس خاکستری ترجیح داده شدند زیرا شدت داده ها برای پردازش در برنامه مبتنی بر سلول بسیار زیاد بود. پتانسیل تصاویر رنگی RGB احتمالاً نتایج بهتری نسبت به تصاویر در مقیاس خاکستری ایجاد می کند.
در طول استخراج رخدادهای شکاف با استفاده از مدل های ANFIS یا LR، حساسیت الگوریتم منطقه MSER در مورد اثرات سایه بر استنتاج ها تأثیر منفی گذاشت. از آنجایی که اشیاء طبیعی و مصنوعی مانند درختان و ساختمانها ممکن است باعث افزایش سلولهای خروجی نادرست شوند، مدلهای پیشنهادی برای استفاده در مزارع برهنه یا مکانهایی که دارای پوشش گیاهی و سکونتگاههای کمیاب هستند، برای اجرای موفقیتآمیز خودکار توصیه میشوند تا به دست آوردن موارد بیشتر نتایج دقیق
















بدون نظر