


خلاصه
محل اسکار زمین لغزش برای فرآیند مدیریت ریسک اساسی است، به عنوان مثال، امکان کاهش این مناطق را فراهم می کند و خطرات مرتبط را برای جمعیت کاهش می دهد. استفاده از داده های سنجش از دور ابزاری ضروری برای شناسایی، نقشه برداری و پایش زمین لغزش است. علیرغم استفاده بالقوه آن برای مدیریت خطر زمین لغزش، استفاده از سنجش از دور دارای چند اشکال است. رویدادهای فوق معمولاً در مناطق شیبدار زیاد رخ میدهند که اغلب با وقوع سایه در تصاویر ماهوارهای همراه است که فرآیند شناسایی را مختل میکند و منجر به طبقهبندی با دقت پایین میشود. از این نظر، هدف این مقاله ارزیابی دقت مجموعههای مختلف سیستمهای طبقهبندی کننده چندگانه (MCS) برای شناسایی اسکار زمین لغزش است. یک رویداد زمین لغزش شدید در یک شیب تند با یک منطقه میزان بارندگی بالا در منطقه جنوب شرقی برزیل انتخاب شد. ده طبقهبندیکننده نظارتشده برای شناسایی این رویداد شدید و سایر ویژگیهای احتمالی برای نگاشت موضوعی LANDSAT (TM) از ژوئن سال 2000 استفاده شد. نتایج ارزیابی شدند و 9 MCS بر اساس دقت طبقهبندیکنندهها ساخته شد. رای گیری از طریق روش گروهی، همراه با روش های تحلیل زمینه ای و انتخاب تصادفی به کار گرفته شد. دقت برای هر گروه طبقهبندی مورد ارزیابی قرار گرفت، و افزایش تدریجی در دقت گروه مشاهده شد زیرا کمترین دقیقترین طبقهبندیکننده حذف شد. بهترین دقت برای شناسایی زمین لغزش از مجموعه سه نتایج طبقهبندی دقیقتر پدید آمد. به طور خلاصه، کاربرد MCS عموماً کیفیت طبقهبندی را بهبود بخشید و منجر به خطاهای حذف کمتر، همراه با درصد طبقهبندی بهتر برای کلاس «لغزش زمین» شد. با این حال، انتخاب الگوریتم گروه MCS باید برای هدف طبقهبندی سفارشی شود. ارزیابی شاخصهای دقت تکی هر الگوریتم برای تعیین آنهایی که بیشترین عملکرد را در رابطه با نتایج نهایی دارند، بسیار مهم است.
کلید واژه ها:
سیستم طبقه بندی چندگانه ; زخم زمین لغزش ; ارزیابی دقت
1. معرفی
چندین منطقه در جهان تحت تأثیر میزان بارندگی بالا در دوره های زمانی کوتاه قرار می گیرند که منجر به بلایای طبیعی می شود [ 1 ]. در مناطق کوهستانی، این رویدادها به نفع وقوع زمین لغزش [ 2 ، 3 ] است و خطراتی را برای جمعیتی که در این مناطق زندگی می کنند یا از طریق آن سفر می کنند، ایجاد می کند. در نتیجه ساخت و ساز و تغییرات در ساختار خاک، لبه های جاده به نفع این نوع رویدادها هستند [ 4 ، 5 ]. مطالعه قبلی [ 6] فراوانی و پراکندگی زمین لغزش ها را در سه حوضه هیدروگرافی مورد تجزیه و تحلیل قرار داد و دریافت که جاده سازی شایع ترین علت زمین لغزش است. نظارت و شناسایی مکان هایی که مستعد زمین لغزش هستند بسیار پیچیده است زیرا تیم هایی که مسئول نظارت بر بلایای طبیعی هستند معمولا کوچک هستند، در حالی که مناطقی که نیاز به نظارت دارند بزرگ هستند [7 ] . با وجود این مشکلات، نقشه برداری و کاهش خسارات ناشی از زمین لغزش برای اطمینان از ایمنی جمعیت مهم است [ 8 ].
استفاده از داده های سنجش از دور پتانسیل زیادی برای نظارت و مدیریت زمین لغزش ها ارائه می دهد. سنجش از دور جایگزین خوبی برای نقشه برداری اسکارهای زمین لغزش است زیرا می تواند مناطق بزرگی را پوشش دهد و امکان تجزیه و تحلیل سریع را فراهم می کند [ 9 ]. با این حال، زمین لغزش معمولا در مناطق کوهستانی رخ می دهد، جایی که اثرات توپوگرافی، همراه با سایه های برجسته و پوشش گیاهی، می تواند زخم های زمین لغزش را پنهان کند [ 10 ]. بنابراین، تکنیک های سنجش از دور باید برای رفع این مشکلات توسعه یابد.
برای به دست آوردن اطلاعات تصاویر ماهواره ای می توان از منابع متعددی استفاده کرد. تکنیکهای بهبود میتوانند شناسایی شی [ 11 ] را تسهیل کنند، در حالی که الگوریتمهای طبقهبندی از اطلاعات آماری تصاویر برای جداسازی کلاسهای مورد علاقه استفاده میکنند [ 12 ]. با این حال، معیارها باید به خوبی تعریف شده و مناسب برای کلاس / شی مورد علاقه، برای به حداقل رساندن احتمال نتایج نادرست [ 13 ]. علاوه بر این، همه الگوریتم ها به تنظیمات پارامتر بر اساس هدف اصلی طبقه بندی برای دستیابی به بهترین عملکرد نیاز دارند [ 14 ]. با این حال، علی رغم تمام اقدامات پیشگیرانه، واگرایی بین نتایج الگوریتم های مختلف ممکن است بسیار زیاد باشد.
به همین دلیل، جستوجوی جایگزینهایی که طبقهبندیها را برای دستیابی به یک نتیجه نهایی واقعبینانه ترکیب میکنند، وجود دارد که در ادبیات مورد بحث قرار گرفته است [ 15 ، 16 ، 17 ، 18 ، 19 ، 20 ، 21 ]. طبقه بندی های ترکیبی که در ادبیات به عنوان سیستم های طبقه بندی کننده چندگانه (MCSs) [ 22 ] یا مجموعه های طبقه بندی کننده [ 23 ] شناخته می شوند، می توانند با استفاده از چندین رویکرد استفاده شوند. حداقل سه دسته از گروههای طبقهبندی وجود دارد: الگوریتمهایی که مبتنی بر دستکاری نمونههای آموزشی [ 24 ] هستند، ترکیبهای الحاقی [ 25]]، و ترکیبات موازی [ 26 ].
در بررسی ادبیات استفاده از MCSها، نشان داده شد [ 27 ] که کارایی گروه های طبقه بندی بر اساس بهبود مستمر دقت نتایج است. نویسندگان تأکید میکنند که انتخاب مناسبترین استراتژی گروه برای هدف طبقهبندی برای استفاده از MCSها اساسی است. با توجه به [ 28 ]، مجموعه الگوریتم ها باید با احتیاط توسعه یابد. مهم ترین مرحله برای به دست آوردن نتایج خوب، انتخاب مناسب ترین الگوریتم ها برای حل مسئله است.
ارزیابیهای قبلی از طبقهبندیکنندههای مورد استفاده برای درک عملکرد آنها در حین به دست آوردن نتیجه مطلوب بسیار مهم است. با توجه به [ 29 ، 30 ]، تجزیه و تحلیل یکپارچه از شاخص های مختلف دقت به منظور درک بهتر نتایج یک طبقه بندی مهم است.
این مطالعه با هدف شناسایی بهترین مجموعه طبقهبندی کننده برای ترسیم اسکارهای زمین لغزش در مناطق کوهستانی در تصاویر ماهوارهای با وضوح فضایی متوسط (30 متر) انجام شده است. علاوه بر این، این مقاله سهم معیارهای تنوع طبقهبندیها را در نتیجه نهایی دقت ترکیبی الگوریتمها ارزیابی میکند.
برای رسیدن به هدف پیشنهادی، این مقاله مقدمهای بر MCSs و شناسایی زمین لغزش ارائه میکند. در بخش مواد و روشها، ویژگیهای منطقه مورد مطالعه و سپس رویههای مورد استفاده ارائه شده است. بخش نتایج، نتایج طبقهبندی را برای هر الگوریتم و ارزیابی دقت آنها، و همچنین بهترین طبقهبندی MCS و تجزیه و تحلیل دقت برای هر MCS را ارائه میکند. نتایج با بحث و سپس نتیجه گیری دنبال می شود.
2. مواد و روش ها
2.1. منطقه مطالعه
منطقه مورد مطالعه در رشته کوه Serra do Mar در ایالت سائوپائولو، برزیل واقع شده است. مربعی به مساحت 144 کیلومتر مربع شامل یک زمین لغزش شدید که در دسامبر 1999 در حوضه هیدروگرافی رودخانه پیلوس رخ داد، تعریف شد. این رانش زمین پس از چهار روز بارندگی شدید با 230 میلی متر بارندگی رخ داد. جابجایی زمین لغزش 700 متر از بزرگراه آنچیتا را در حدود کیلومتر 42 بزرگراه تحت تاثیر قرار داد [ 31 ]. شکل 1موقعیت منطقه مورد مطالعه (میدان سیاه) و محل لغزش رودخانه پیلوس را نشان می دهد. میدان انتخاب شده شامل دو جاده مهم است که شهر سائوپائولو را به بزرگترین بندر آمریکای لاتین متصل می کند. این منطقه همچنین به دلیل دشواری نقشه برداری اسکار زمین لغزش انتخاب شد، زیرا یک چشم انداز پیچیده با سایه های زیادی را ارائه می دهد.
این منطقه سالانه بیش از 3000 میلی متر بارندگی دارد. شدیدترین بارندگی بین نوامبر و مارس رخ می دهد. بارانی ترین ماه ها مجموع بارندگی های بیش از 1000 میلی متر را تجربه کرده اند [ 33 ]. بنابراین، این رویداد به عنوان نمونه ای برای ارزیابی قابلیت روش شناسی و شناسایی سایر اسکارهای زمین لغزش در منطقه مورد مطالعه استفاده شد.
2.2. رویه ها
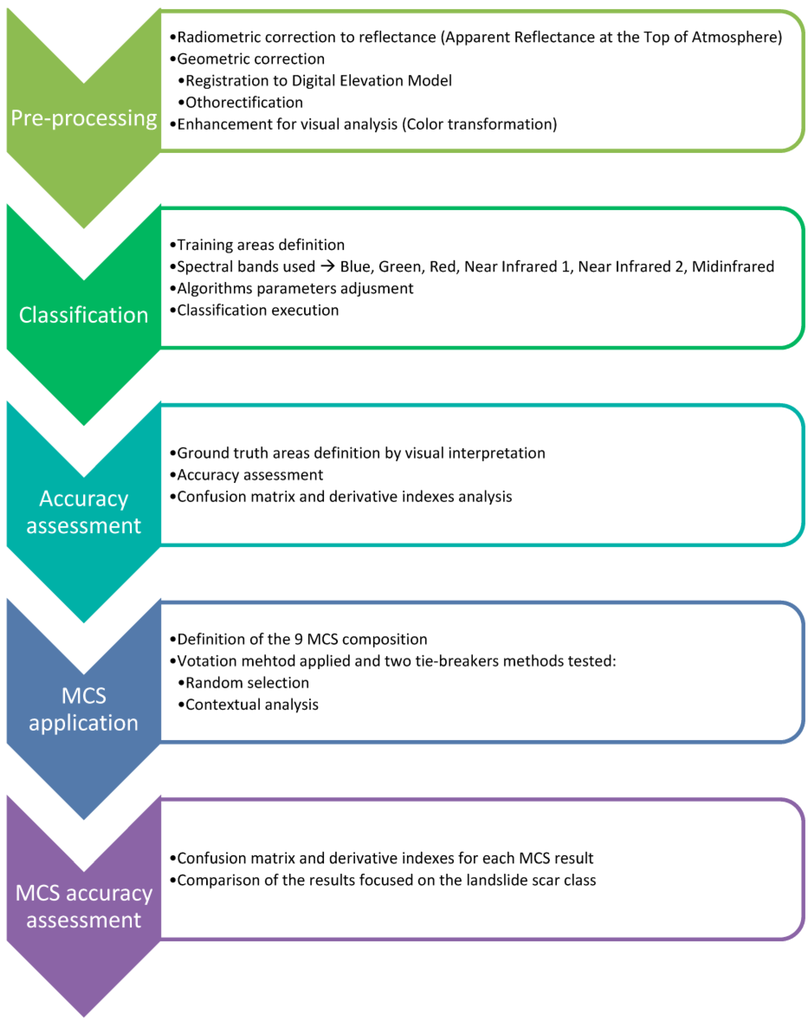
شکل 2 روش مورد استفاده در این مطالعه را در فلوچارتی که مراحل پردازش تصویر دیجیتال را فهرست می کند، خلاصه می کند.
ابتدا، مربع منطقه مورد مطالعه از صحنه LANDSAT TM 5 که در 25 ژوئن 2000 گرفته شد، استخراج شد و برای بهبود ویژگی های آن از قبل پردازش شد. تصویر به بازتاب تصحیح شد، در مدل ارتفاعی دیجیتال ثبت شد و با استفاده از الگوریتم ضرایب چند جملهای گویا تصحیح شد. برای تسهیل شناسایی بصری اسکارهای زمین لغزش، که کیفیت مناطق آموزشی را افزایش میدهد، از تکنیکهای تقویتی برای برجسته کردن منطقه لغزش استفاده شد. تبدیل رنگ از قرمز، سبز و آبی (RGB) به رنگ، اشباع و مقدار (HSV) اتخاذ شد و از باندهای 3 (قرمز)، 4 (نزدیک مادون قرمز)، و 5 (مادون قرمز میانی) استفاده شد. با توجه به [ 34]، انتخاب گروه باعث افزایش تفاوت بین خاک و پوشش گیاهی می شود. تبدیل به فضای رنگی HSV برای نرم کردن اثرات سایه توپوگرافی [ 35 ] استفاده شد. شکل 3 صحنه نمونه را در فضای رنگی HSV نشان می دهد و ناحیه لغزش را برجسته می کند.
برای ادامه طبقه بندی، مناطق آموزشی بر اساس دانش قبلی کاربر در مورد منطقه، به ویژه منطقه لغزش شناخته شده در حوضه آبخیز Pilões، با استفاده از تصویر رنگی HSV تعریف شد. منطقه مورد مطالعه توسط 10 الگوریتم طبقه بندی مختلف طبقه بندی شد. شش باند ماهواره LANDSAT TM 5 برای جلوگیری از حذف هرگونه اطلاعات موجود استفاده شد.
این مطالعه از 10 الگوریتم طبقهبندی نظارت شده رایج در ادبیات [ 21 ، 36 ، 37 ، 38 ، 39 ، 40 ] برای طبقهبندی صحنههای LANDSAT استفاده کرد. علاوه بر این، تعداد زیادی الگوریتم برای دستیابی به نتایج طبقه بندی متنوع به کار گرفته شد. با توجه به پیشینه نظری سیستم های طبقه بندی کننده، معیارهای تنوع نقش مهمی در نتیجه نهایی دارند [ 27 ، 41 ].
همه الگوریتم ها برای دستیابی به حداکثر عملکرد به تنظیمات پارامتر نیاز دارند [ 42 ]. بنابراین بهترین تنظیمات برای جداسازی طبقات اسکارهای زمین لغزش در نظر گرفته شد. این پارامترها بر اساس ویژگی های هر الگوریتم و همچنین ویژگی های کلاسی که باید شناسایی شود، تعریف شدند. کلاس “لغزش زمین” ویژگی های بسیار خاصی دارد. با این حال، با کلاس های دیگر در برخی از باندهای LANDSAT 5 اشتباه می شود. بنابراین، پارامترهای این کلاس بسیار محدود بودند. به عنوان مثال، آنها برای حداقل تغییرات در کلاس اجازه می دهند.
پارامترهای الگوریتمهای طبقهبندی نظارتشده بر اساس پاسخهای آنها به طبقهبندی منطقه لغزش در امتداد رودخانه Pilões تنظیم شدند. الگوریتم درخت تصمیم بر اساس قوانینی که توسط طبقهبندیکننده J48 در نرمافزار دادهکاوی WEKA 3.6 ایجاد شده است، اعمال شد. J48 یک طبقه بندی قدرتمند است که در سنجش از دور استفاده می شود [ 43 ، 44 ، 45 ]. الگوریتم های مورد استفاده در زیر توضیح داده شده است:
-
تحت نظارت
- ○
-
ماشین بردار پشتیبان (SVM) – نوع هسته = تابع بایاس شعاع، گاما در تابع هسته = 0.167، پارامتر جریمه = 500، آستانه احتمال طبقه بندی = 0
- ○
-
شبکه عصبی (NN)—فعال سازی = لجستیک، مشارکت آستانه آموزشی = 0.9، نرخ آموزش = 0.5، شتاب آموزش = 0، معیار خروج RMS آموزش = 0.1
- ○
-
رمزگذاری باینری (BE) – حداقل آستانه رمزگذاری برای کلاس لغزش = 3
- ○
-
واگرایی اطلاعات طیفی (SID) – حداکثر آستانه واگرایی برای کلاس زمین لغزش = 0.005
- ○
-
نگاشت زاویه طیفی (SAM) – حداکثر زاویه برای کلاس لغزش = 0.047
- ○
-
طبقه بندی حداکثر احتمال (MLC) – آستانه احتمال برای کلاس زمین لغزش = 0.05
- ○
-
فاصله ماهالانوبیس (MHD) – خطای حداکثر فاصله = 1.5
- ○
-
حداقل فاصله (MD) – حداکثر انحراف استاندارد از میانگین برای کلاس زمین لغزش = 1.1، خطای حداکثر فاصله = 10
- ○
-
موازی پایه (PAR) – حداکثر انحراف استاندارد از میانگین برای کلاس زمین لغزش = 0.72
-
درخت تصمیم (DT)
- ○
-
داده کاوی J-48
نتایج طبقه بندی برای هر الگوریتم بر اساس دقت آنها ارزیابی شد و 9 گروه از 10 طبقه بندی کننده با استفاده از الگوریتم های کمتر با دقت بیشتر تعریف شدند. گروه های طبقه بندی با استفاده از اصل رای اکثریت ایجاد شدند. در مورد تساوی، از تحلیل زمینه مبتنی بر پیکسل یا روش انتخاب تصادفی استفاده شد. دقت هر یک از گروه ها مورد ارزیابی قرار گرفت و تجزیه و تحلیل تکامل دقت انجام شد.
عملکرد همه نتایج طبقهبندی بر اساس حوزههای حقیقت زمینی تعریف شده توسط تفسیر بصری ارزیابی شد. شاخصهای دقت زیر مورد استفاده قرار گرفت: شاخص کاپا، دقت کلی، احتمال طبقهبندی صحیح برای کلاس «لغزش»، و خطاهای کمیسیون و خطاهای حذف برای کلاس «لغزش» [46 ، 47 ] .
بر اساس ارزیابی دقت نتایج طبقهبندی، امکان تعریف طبقهبندیکنندههایی با بهترین عملکرد و همچنین تعریف تدریجی مجموعههای الگوریتم وجود داشت که بدترین نتایج را از مجموعه حذف کرد. نه گروه طبقهبندیکننده تعریف شد: یکی شامل 10 الگوریتم بود، و بقیه به تدریج الگوریتمهایی را با بدترین عملکرد بر اساس شاخصهای دقت حذف کردند. جدول 1 الگوریتم هایی را نشان می دهد که در هر یک از مجموعه ها استفاده شده است.
گروه ها بر اساس بهترین سطوح دقت طبقه بندی کننده ها انتخاب شدند. با توجه به [ 28 ]، انتخاب الگوریتم برای بهبود دقت در یک سیستم چند طبقهبندی بسیار مهم است. بنابراین، گروه از بزرگترین منابع خطا استفاده نمی کند و پتانسیل بیشتری برای بهبود نتایج نهایی دارد.
برای طراحی این مجموعهها، همه طبقهبندیها به قالب جدول صادر شدند و ماتریسها به یک ستون منفرد از 159201 ردیف با یک ردیف برای هر پیکسل تبدیل شدند. تجزیه و تحلیل رأی گیری برای محاسبه طبقه بندی هر الگوریتم i انجام شد و تکرارشونده ترین کلاس k به پیکسل j نسبت داده شد [ 19 ، 25 ]. اگر یک تساوی بین دو یا چند کلاس k رخ داد ، دو استراتژی اتخاذ شد: روش انتخاب تصادفی [ 48 ] و تحلیل نزدیکترین همسایه [ 49 ]. بنابراین، مقدار Fijبه عنوان نتیجه نهایی برای هر یک از استراتژی های شکست تساوی محاسبه شد.
دقت گروه های طبقه بندی کننده و الگوریتم های طبقه بندی مورد ارزیابی قرار گرفت. در نهایت، نتایج شاخصهای دقت برای طبقهبندیکنندههای جدا شده و برای 18 گروه توسعهیافته (9 با استفاده از روش انتخاب تصادفی و 9 با استفاده از روش تحلیل زمینه برای شکست کراوات) مقایسه شد.
3. نتایج
شکل 4 نتایج طبقه بندی های هر یک از 10 الگوریتم را نشان می دهد. نتایج طبقه بندی به طور گسترده ای متفاوت است، به ویژه نتایج مربوط به کلاس “لغزش زمین”. نتایج برخی از طبقهبندیکنندهها برای کلاسهای دیگر به دلیل اولویتی که در تنظیم پارامترهای الگوریتم به کلاس «لغزش زمین» داده شد، مخلوط شد.
جدول 2 به طور خلاصه ارزیابی دقت طبقه بندی کننده را نشان می دهد. خطاهای اشتباه و حذف و همچنین احتمال طبقه بندی صحیح فقط برای کلاس “لغزش زمین” ارائه شده است. طبقهبندیکنندههای SVM، NN و MLC از سایرین برتری داشتند.
نتایج بهدستآمده توسط الگوریتمهای MLC، NN و SVM برای ارزیابی ضریب کاپا و دقت کلی مهم هستند. ارزیابی خطاهای کمسیون و حذف نشان می دهد که خطاهای کمیسیون همیشه زیاد بوده (بیشتر از 0.6) و کمترین خطاهای حذف توسط الگوریتم های MLC و NN به دست آمده است. این نتایج به دلیل شباهت طیفی بالا بین کلاس “لغزش زمین” و کلاس “گیاهی” و “آب” (به ویژه به دلیل سایه های توپوگرافی) است. بهترین احتمال طبقهبندی صحیح همراه با کمترین خطاهای کمیسیون در کلاس لغزش توسط الگوریتمهای NN، SVM و MLC بهدست آمد. سایر الگوریتمها، مانند رمزگذاری باینری، احتمالات خوبی برای طبقهبندی صحیح برای کلاس “لغزش زمین” به دست آوردند. با این حال، خطاهای بزرگ کمیسیون مشاهده شد. الگوریتمهایی مانند SAM ضرایب کاپا پایینی داشتند، اما احتمال طبقهبندی صحیح و خطاهای کمیسیون برای کلاس «لغزش» بهتر بود.
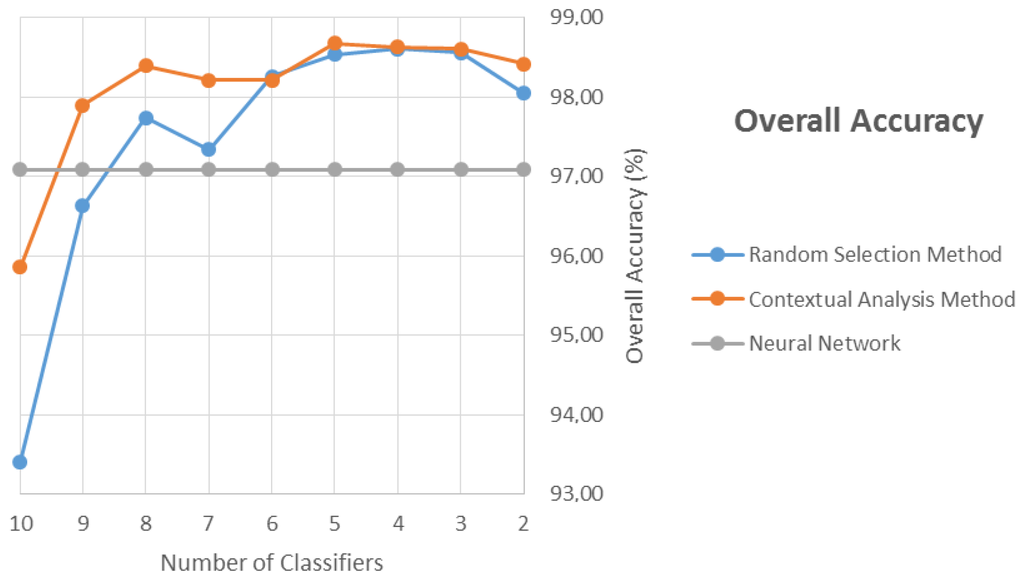
جدول 3 ارزیابی نتایج ترکیب های مختلف طبقه بندی کننده را نشان می دهد. شکل 5 ، شکل 6 ، شکل 7 ، شکل 8 و شکل 9 تکامل شاخص های دقت را برای گروه های طبقه بندی کننده و مقایسه با نتایج بهترین طبقه بندی کننده (ضریب کاپا، دقت کلی، خطاهای کمیسیون، خطاهای حذف و احتمال را نشان می دهد. طبقه بندی صحیح برای کلاس ‘لغزش’، به ترتیب).
بهترین نتایج برای کلاس “لغزش زمین” توسط مجموعه ای از سه طبقه بندی کننده (SVM، NN، و MLC) به دست آمد. با این حال، برای طبقه بندی کلی، بهترین نتایج توسط گروه پنج طبقه بندی به دست آمد. علاوه بر این، برای همه گروهها، روش تحلیل زمینهای نتایج بهتری نسبت به روش انتخاب تصادفی برای شکست کراوات ارائه کرد.
شکل 5 که تکامل ضریب کاپا را در رابطه با گروههای طبقهبندی نشان میدهد، نشان میدهد که با حذف سه الگوریتم اول، عملکرد گروه به طور قابلتوجهی بهبود مییابد، با مجموعه پنج الگوریتم به حداکثر عملکرد خود میرسد و اندکی کاهش مییابد. مجموعه ای از دو الگوریتم علاوه بر این، نتایج مجموعهها تنها بالاتر از بالاترین ضریب کاپا طبقهبندیکنندههای جدا شده (در این مورد، NN) پس از گروه نهگانه طبقهبندیکننده است. همین تکامل برای دقت کلی در شکل 6 مشاهده شده است .
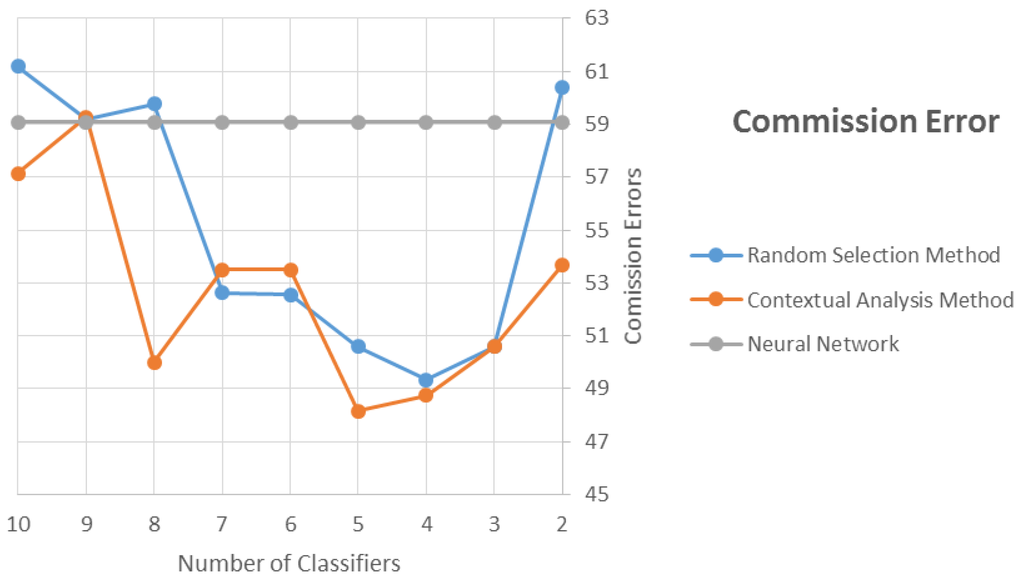
تجزیه و تحلیل خطاهای کمیسیون برای کلاس “لغزش زمین” ( شکل 7 ) نشان می دهد که بهترین نتیجه از طریق رویکرد تحلیل زمینه ای حاصل می شود که از پنج الگوریتم تشکیل شده است. کاهش در خطاهای کمیسیون تا زمانی که از پنج الگوریتم برتر استفاده شود مشاهده می شود و سپس مقادیر افزایش می یابد (الگوریتم های چهار، سه و دو). مقایسه بهترین نتایج الگوریتم ها به صورت مجزا نشان داد که SVM بهتر از بقیه عمل می کند. با این حال، تنها طبقهبندیهایی که شامل ده و دو الگوریتم در رویکرد انتخاب تصادفی بودند، نتایج بدتری داشتند.
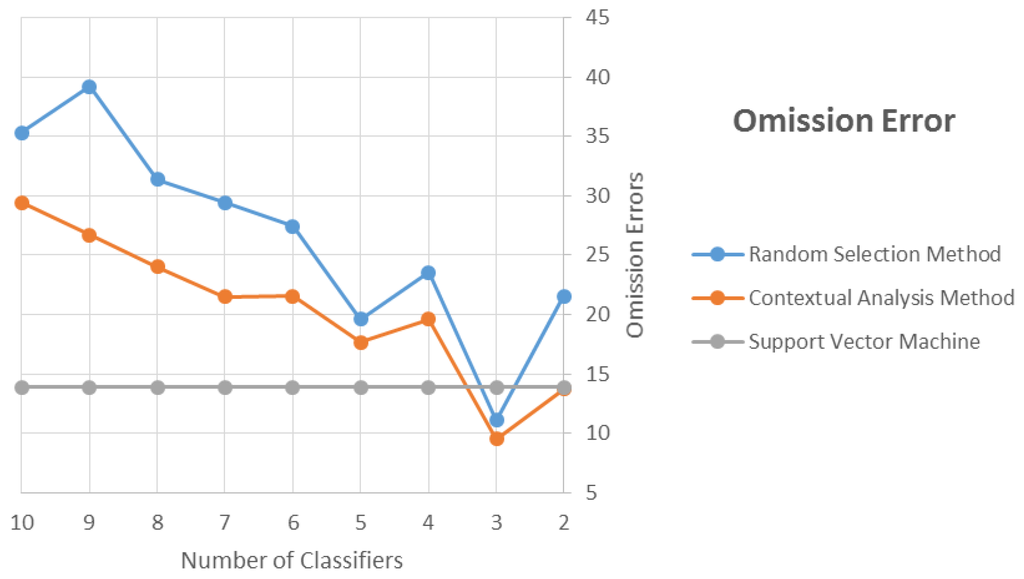
در تجزیه و تحلیل خطاهای حذف برای کلاس “لغزش زمین” ( شکل 8 )، الگوریتم SVM از بقیه بهتر عمل کرد و تنها توسط گروه هایی با سه الگوریتم پیشی گرفت. با این حال، مجموعه ای از 10 الگوریتم بدترین نتایج را ارائه نکردند. هنگامی که از رویکرد انتخاب تصادفی برای شکست کراوات استفاده شد، نتیجه این مجموعه تنها پس از استفاده از هفت الگوریتم پیشی گرفت. این ممکن است به دلیل استفاده از الگوریتم رمزگذاری باینری باشد که منجر به خطاهای کارمزد زیاد اما خطاهای حذف کم می شود. این نتیجه تنها زمانی جبران می شود که برخی از طبقه بندی کننده ها حذف شوند. اگرچه این طبقهبندیکنندهها خطاهای کمیسیون کمتری دارند، خطاهای حذف بیشتر است. بنابراین، سایر طبقات با آنهایی که مربوط به مناطق زمین لغزش هستند همراه هستند.
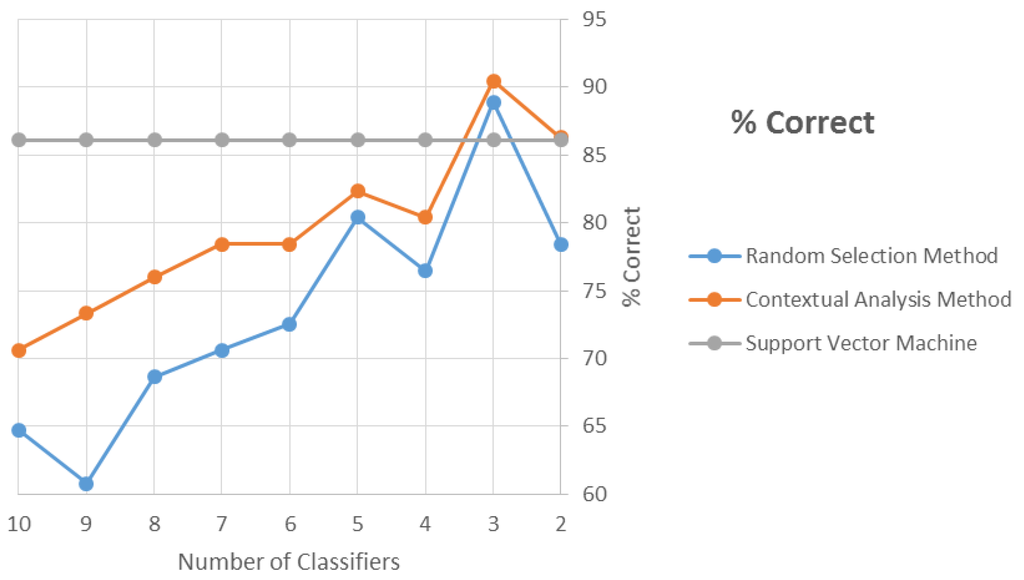
تجزیه و تحلیل احتمال طبقه بندی صحیح برای کلاس “لغزش زمین” تمایل واضحی به سمت بهبود دقت را نشان می دهد زیرا الگوریتم های ضعیف حذف می شوند. مجموعه ای از سه الگوریتم زمانی بهترین نتیجه را به دست می دهد که از رویکرد تحلیل زمینه ای برای شکست کراوات استفاده شود. علاوه بر این، مجموعهای از سه الگوریتم (SVM، NN، و MLC) تنها الگوریتمهایی هستند که نتایج بهتری نسبت به الگوریتمهای SVM بهصورت مجزا تولید میکنند.
جدول 4 ماتریس سردرگمی را نشان می دهد که با 10 طبقه بندی کننده طراحی شده است و نتیجه رای گیری نهایی “درست” در نظر گرفته می شود. سردرگمی قابل توجهی بین طبقات “لغزش زمین”، “آب” و “گیاهی” مشاهده می شود.
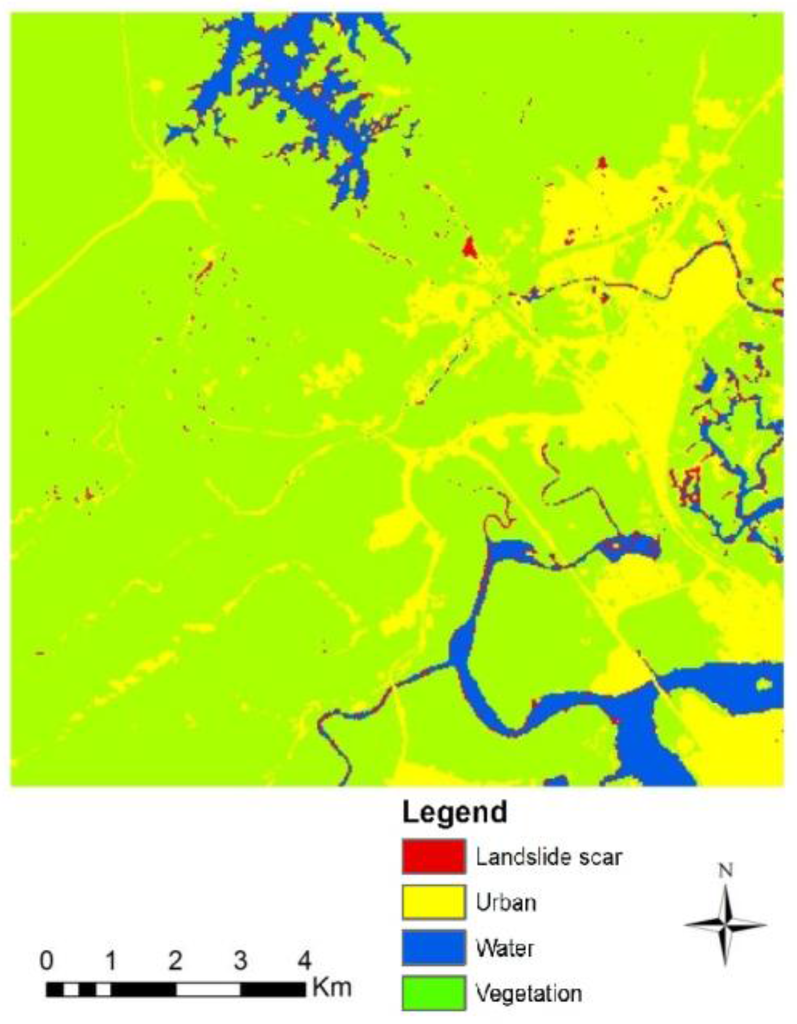
بنابراین، گروه با سه طبقهبندیکننده (SVM، NN و MLC) که از رویکرد تحلیل زمینهای برای شکست کراوات استفاده میکردند، بهترین شاخصهای دقت را ارائه کردند. شکل 10 نقشه را با طبقه بندی نهایی نشان می دهد و به وضوح مناطقی را که به عنوان زمین لغزش طبقه بندی می شوند نشان می دهد.
علاوه بر زخم زمین لغزش شناخته شده، سایر ویژگیها و اسکارهای مرتبط با روش شناسایی شدند: یک اسکار زمین لغزش مرتبط با یک جاده (A)، یک زخم زمین لغزش بزرگ دیگر در نزدیکی یک منطقه شهری (B) و یک شیب تند خاک در معرض رخ داده است. نزدیک یک پالایشگاه نفت (C) در شکل 11 ارائه شده است . علاوه بر وقایع بالا، سایر ویژگیهای زمین لغزش نیز شناسایی شد، مانند زخمهای جدا شده در کوه و مناطق فرسایشی شدید مرتبط با رودخانهها و مرزهای مخزن و با خط لوله نفت در امتداد کوه.
4. بحث
استفاده از تکنیکهای ترکیب طبقهبندیکننده با ارزیابی مشترک دقت کلی، ضریب کاپا، خطاهای حذف و کارمزد، و احتمال طبقهبندی صحیح برای کلاس لغزش، نتایج با کیفیت بالاتری را به همراه داشت. طبقه بندی با دقت بالا در مناطق توپوگرافی ناهموار یک موضوع مهم در سنجش از دور نوری است [ 50 ]، به ویژه زمانی که هدف مورد نظر ممکن است در سایه های برجسته قرار گیرد. جایگزین هایی مانند استفاده از تکنیک های تقویت با تبدیل رنگ یا استفاده از شاخص های پوشش گیاهی [ 51] شناسایی بصری این مناطق را تسهیل می کند. با این حال، آنها ممکن است نتایج رضایت بخشی برای کل صحنه به همراه نداشته باشند. استفاده از ترکیبهای طبقهبندی کننده شاخصهای دقت بهتری را ارائه کرد، خطاهای حذف و اشتباه کمتری را معرفی کرد و در مقایسه با نتایج [ 52 ] پتانسیل بیشتری را برای شناسایی سایر اسکارها در صحنه مورد مطالعه نشان داد.
ارزیابی نتایج طبقهبندی جدا شده هر یک از الگوریتمها نشان داد که برخی از آنها در پرداختن به مشکل شناسایی زمین لغزش عملکرد خوبی داشتند. سایر الگوریتمها دقت بسیار پایینی داشتند و برای شناسایی زمین لغزش ناکارآمد بودند. الگوریتمهای DT، SVM، NN و MLC ضرایب کاپا بزرگتر از 0.8 را برای نتایج کلی طبقهبندیها تولید کردند. طبقهبندیکنندههای دیگر دارای ضرایب کاپا متوسط یا پایین و دقت کلی بودند، اگرچه این نتایج برای کلاس “لغزش زمین” منطقی هستند، مانند موارد الگوریتمهای SAM و MDC.
ماتریس سردرگمی برای 10 طبقه بندی ( جدول 4 ) سردرگمی بین طبقه بندی کننده ها برای هر یک از کلاس ها را نشان می دهد. کلاس “لغزش زمین” به ویژه با کلاس های “طبقه بندی نشده”، “آب” و “گیاهی” اشتباه گرفته می شود. سردرگمی بین طبقهبندیکنندهها نشان میدهد که کلاس «لغزش» دارای ویژگیهایی است که با این کلاسهای دیگر همپوشانی دارند، که به استراتژیهای طبقهبندی دقیقتری نیاز دارد. با توجه به ادبیات [ 27 ، 53 ]، استفاده از معیار تنوع بیشتر بین طبقهبندیکنندهها، عملکرد گروه را بهبود میبخشد. با این حال، برخی از الگوریتم ها با افزایش منابع خطا برای طبقه بندی نهایی، نقش منفی دارند.
ارزیابی نتایج حاصل از ترکیبها نشان میدهد که وقتی الگوریتم با بدترین عملکرد حذف شود، کارآمدتر میشوند. این نتایج مشابه نتایج گزارش های قبلی است [ 54 ، 55] که بیان می کرد مهم ترین مرحله در استفاده از طبقه بندی های ترکیبی، انتخاب الگوریتم است. خطای حذف برای کلاس “لغزش زمین” تنها شاخص دقتی بود که در آن همه ترکیب ها از طبقه بندی کننده ایزوله با بهترین عملکرد، که الگوریتم SVM بود، بهتر عمل کردند. این نتیجه به گنجاندن بالای پیکسلها در کلاس «لغزش» توسط الگوریتمهای مختلف مربوط میشود و منجر به خطاهای کمیسیون بالا میشود. علاوه بر این، احتمال طبقه بندی صحیح در کلاس “لغزش زمین” برای ترکیب 10 طبقه بندی کننده کمتر از عملکرد جدا شده الگوریتم SVM است.
به طور کلی، استفاده از برخی از الگوریتمهای طبقهبندی بر نتایج بهویژه برای کلاس «لغزش زمین» تأثیر منفی گذاشت. برای طبقه بندی کلی صحنه نمونه LANDSAT، بهترین نتایج با ترکیب الگوریتم های پنج، چهار و سه به دست آمد. اگرچه انتخاب الگوریتم بر بهبود عملکرد کلاس “لغزش زمین” متمرکز بود، اما دقت کل طبقه بندی با حذف برخی از الگوریتم ها افزایش می یابد.
طبق مطالعات قبلی [ 27 ، 41 ]، تنوع طبقهبندیکنندهها برای نتیجه طبقهبندی مهم است و ترکیب طبقهبندیهای مشابه نتایج را بهبود نمیبخشد. با این حال، این نتیجه در این مطالعه برای شاخص های دقت، به ویژه برای کلاس “لغزش زمین” مشاهده نشد. استفاده از برخی الگوریتم ها خطاها را در ترکیبات طبقه بندی وارد می کند و دقت کلاس مورد نظر را کاهش می دهد [ 56]]. در این مورد، ارزیابی عملکرد فردی هر طبقه بندی کننده برای کلاس مورد نظر مهم است زیرا هدف افزایش دقت کلاس خاص است. برای اهداف این مطالعه، طبقهبندیکنندههای SVM، NN، و MLC عملکرد مناسبی داشتند و خطاهای کمیسیون و حذف کمتر و درصد طبقهبندی بالایی برای کلاس «لغزش زمین» داشتند. بر اساس نتایج این سه الگوریتم، امکان توسعه ترکیب طبقه بندی کننده برای دستیابی به نتایج دقیق برای نقشه برداری زمین لغزش وجود داشت.
با این حال، برای ترکیب دو الگوریتم، همه شاخصهای دقت نتایجی پایینتر از ترکیب سه الگوریتم تولید کردند. این نتیجه بسیار مهم است زیرا به وضوح نشان می دهد که انتخاب طبقه بندی کننده ها و افزودن معیارهای تنوع برای بهبود نتایج طبقه بندی نهایی مهم است. با این حال، اطلاعاتی که برای طبقه بندی استفاده می شود باید از دقت مناسبی برخوردار باشد تا تأثیر منفی بر نتیجه نهایی ترکیب نداشته باشد.
بنابراین، طبقه بندی باید بر اساس چندین شاخص دقت و نه تنها بر اساس ضریب کاپا یا دقت کلی ارزیابی شود [ 57 ]. این امر به ویژه برای این مطالعه که بر دستیابی به بهترین عملکرد برای یک کلاس خاص متمرکز بود، صادق است. برای این مطالعه، تجزیه و تحلیل خطاهای کمیسیون و حذف از اهمیت فوق العاده ای برخوردار است، زیرا هدف، شناسایی دقیق مناطق لغزش و عدم تخمین بیش از حد نقشه برداری از این مناطق است. نتایج این شاخصهای دقت برای گروههای طبقهبندی بهترین از همه طبقهبندیکنندهها بود، به ویژه برای MCS که از سه بهترین الگوریتم (SVM، NN، و MLC) تشکیل شده است.
استفاده از روش انتخاب تصادفی به عنوان مکانیزم تصمیم گیری در مورد تساوی مناسب است. با این حال، ابزارهای آماری کارآمدتر از اطلاعات مکانی مکمل برای شکستن کراوات نیستند. استفاده از روش تحلیل جغرافیایی – زمینه ای منجر به طبقه بندی های دقیق تری از جمله طبقه بندی های مناسب برای حل مشکل مورد نظر شد. این نتیجه مورد انتظار بود زیرا استفاده از اطلاعات مکانی بر تصمیم گیری تأثیر می گذارد و از تصادفی بودن جلوگیری می کند.
مقایسه نتایجی که با ترکیب سه الگوریتم با الگوریتمهایی که قبلاً گزارش شدهاند [ 52 ] بهدست آمدهاند، تفاوتهای زیادی را نشان میدهد، به ویژه در خطای حذف و احتمال طبقهبندی صحیح برای کلاس «لغزش زمین». استفاده ترکیبی از سه الگوریتم با شاخص های دقت خوب منجر به عملکرد خوب برای طبقه بندی کلاس “لغزش زمین” شد. بر خلاف نتایجی که در ادبیات گزارش شده است [ 58 ، 59 ، 60 ، 61 ، 62 ]، گنجاندن معیارهای تنوع تأثیر منفی بر نتایج طبقه بندی، از جمله طبقه بندی کل صحنه و طبقه بندی برای کلاس “لغزش زمین” داشت. مطابق با [63 ]، هر طبقه بندی کننده برای موارد خاص عملکرد بهتری دارد. بنابراین، ترکیب سه طبقهبندیکننده برتر برای کلاس «لغزش زمین» نتیجه بهتری را برای این کلاس به همراه داشت.
همانطور که توسط چندین نویسنده [ 64 ، 65 ، 66 ] ذکر شده است ، استفاده از یک MCS به طور کلی کیفیت طبقه بندی را بهبود بخشید و منجر به خطاهای حذف کمتر و همچنین درصد طبقه بندی بهتر برای کلاس “لغزش زمین” شد. با این حال، استراتژی استفاده از الگوریتمها برای گروه MCS باید تحلیل و با هدف طبقهبندی تطبیق داده شود. مهم است که شاخصهای دقت هر الگوریتم را بهصورت جداگانه ارزیابی کنید تا آنهایی را که عملکردی مطابق با نتایج نهایی دارند، شناسایی کنید.
5. نتیجه گیری ها
به طور خلاصه، این مقاله ارزیابی MCS ها را ارائه می دهد که بر دقت طبقه بندی یک کلاس متمرکز است. از این نظر، روش کاربردی نشان میدهد که گنجاندن معیارهای تنوع در مجموعه طبقهبندیکننده برای بهبود طبقهبندی مهم است. با این حال، طبقهبندیکنندههایی که استفاده میشوند باید ارزیابی شوند تا از ورود منابع خطا به ترکیب جلوگیری شود.
منطقه مورد مطالعه یک اسکار زمین لغزش شدید شناخته شده را ارائه می دهد و به کارگیری روش شناسی سایر ویژگی های مورد علاقه را با در نظر گرفتن دیدگاه های فرسایشی و زمین لغزش شناسایی کرد که همه آنها با نتایج جدا شده از الگوریتم ها شناسایی نشدند. این نتیجه نشان می دهد که MCS نتیجه طبقه بندی را افزایش داده و شناسایی زمین لغزش ها را از طریق داده های LANDSAT بهبود بخشیده است.
علاوه بر این، استفاده از تجزیه و تحلیل زمینهای بهعنوان یک عامل تساوی منجر به طبقهبندی دقت بهتری شد و نشان داد که تحلیل فضایی دانش بیشتری نسبت به رویکردهای آماری اضافه میکند.
روش ارائه شده برای یک منطقه خاص اعمال شد و برخی از ویژگی ها باید قبل از تکرار مستقیم آن در نظر گرفته شود. منطقه مورد مطالعه پویایی را ارائه می دهد که وقوع رویدادهای شدید زمین لغزش را تسهیل می کند، که امکان استفاده از تصاویر Landsat را فراهم می کند. سایر ماهواره ها بسته به مشخصات منطقه مورد مطالعه می توانند نتایج بهتری ارائه دهند. با این حال، استفاده صحیح از MCS نتیجه طبقه بندی را افزایش می دهد و شناسایی اسکارهای زمین لغزش را تسهیل می کند.
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| TM | نقشهبردار موضوعی |
| MCS | سیستم طبقه بندی چندگانه |
| SVM | ماشین بردار پشتیبانی |
| سام | نقشه برداری زاویه طیفی |
| NN | شبکه عصبی |
| بودن | رمزگذاری باینری |
| SID | واگرایی اطلاعات طیفی |
| MLC | طبقه بندی حداکثر احتمال |
| MD | حداقل فاصله |
| MHD | فاصله ماهالانوبیس |
| PAR | متوازیالسطوح |
| DT | درخت تصمیم |
منابع
- بورگا، م. استوفل، ام. مارا، اف. Jakob، M. پاسخ هیدروژئومورفیک به بارش شدید در سیستمهای سرآب: سیلهای ناگهانی و جریان زباله. جی هیدرول. 2014 ، 518 ، 194-206. [ Google Scholar ] [ CrossRef ]
- پتلی، دی. الگوی جهانی تلفات جانی ناشی از رانش زمین. زمین شناسی 2012 ، 40 ، 927-930. [ Google Scholar ] [ CrossRef ]
- وانگ، اچ. ژانگ، ی. Hu, H. مطالعه ای در مورد رابطه بین وقوع زمین لغزش و بارندگی. در مجموعه مقالات دومین کنفرانس بین المللی فناوری برق و مهندسی عمران، Yichang، چین، 8-20 مه 2012; ص 200-203.
- دی مارتینو، ال. ماسیوکو، ال. ریکا، جی. توجا، م. روابط بین پدیده لغزش و شبکه جاده: نمونه ای از منطقه تپه ای استان آستی (شمال غربی ایتالیا). مهندس جئول Soc. تریت 2014 ، 2 ، 1049-1053. [ Google Scholar ]
- کومار، ک. جانگپانگی، ال. Gangopadhyay، S. بزرگراه در مقابل رانش زمین و پیامدهای آن در هیمالیا. زمین لغزش. Geoenvironment ایمن 2014 ، 1 ، 389-395. [ Google Scholar ]
- Guthrie, RH اثرات ورود به سیستم بر فراوانی و توزیع زمین لغزش در سه حوزه آبخیز در جزیره ونکوور، بریتیش کلمبیا. ژئومورفولوژی 2002 ، 43 ، 273-292. [ Google Scholar ] [ CrossRef ]
- گوزتی، اف. موندینی، AC; کاردینالی، م. فیوروچی، اف. سانتانجلو، ام. نقشههای موجودی چانگ، KT لغزش: ابزارهای جدید برای یک مشکل قدیمی. علوم زمین Rev. 2012 , 112 , 42-66. [ Google Scholar ] [ CrossRef ]
- مانکونی، آ. کاسو، اف. آردیزون، اف. بونانو، م. کاردینالی، م. دی لوکا، سی. گوگوئن، ای. مارکسینی، آی. پاریس، م. وناری، سی. و همکاران ارتباط مختصر: نقشه برداری سریع رویدادهای زمین لغزش: زمین لغزش 3 دسامبر 2013 Montescaglioso، ایتالیا. نات. سیستم خطرات زمین. علمی 2014 ، 14 ، 1835-1841. [ Google Scholar ] [ CrossRef ]
- طوفانی، وی. هونگ، ی. Singhroy، V. مقدمه: تکنیک های سنجش از دور برای نقشه برداری و پایش زمین لغزش. زمین لغزش. ژئومحیط ایمن 2014 ، 1 ، 301-303. [ Google Scholar ]
- نیکول، جی. Wong، سنجش از راه دور MS Satellite برای فهرست دقیق زمین لغزش با استفاده از تشخیص تغییر و ادغام تصویر. بین المللی J. Remote Sens. 2005 ، 26 ، 1913-1926. [ Google Scholar ] [ CrossRef ]
- لیو، جی جی. Mason, P. پردازش تصویر ضروری و GIS برای سنجش از دور . Wiley-Blackwell: New York, NY, USA, 2009; پ. 450. [ Google Scholar ]
- لو، دی. ونگ، کیو. موران، ای. لی، جی. هتریک، اس. طبقه بندی تصاویر سنجش از دور. در پیشرفتها در سنجش از دور محیطی: حسگرها، الگوریتمها و کاربردها، بخش دوم . CRC Press/Taylor & Francis Group ناشران: Boca Raton، FL، USA، 2011; صص 219-240. [ Google Scholar ]
- ریچاردز، JA تجزیه و تحلیل تصویر دیجیتال سنجش از دور . Springer: برلین، آلمان، 1999. [ Google Scholar ]
- Schott, JR Remote Sensing ; انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، 2007; پ. 513. [ Google Scholar ]
- Steele، BM ترکیب طبقهبندیکنندههای متعدد: برنامهای با استفاده از اطلاعات مکانی و سنجش از دور برای نقشهبرداری از نوع پوشش زمین. سنسور از راه دور محیط. 2000 ، 74 ، 545-556. [ Google Scholar ] [ CrossRef ]
- بریم، جی. بندیکتسون، جی. Sveinsson, J. طبقهبندیکنندههای چندگانه به دادههای سنجش از راه دور چند منبعی اعمال میشوند. IEEE Trans. Geosci. Remote Sens. 2002 , 40 , 2291-2299. [ Google Scholar ] [ CrossRef ]
- بندیکتسون، جی. چانوسوت، جی. Fauvel، M. سیستم های طبقه بندی کننده چندگانه در سنجش از دور: از اصول اولیه تا پیشرفت های اخیر. در سیستم های طبقه بندی کننده چندگانه ؛ Springer: برلین آلمان، 2007; ص 501-512. [ Google Scholar ]
- Doan، HTX; Foody, GM افزایش دقت طبقه بندی نرم از طریق استفاده از مجموعه ای از طبقه بندی کننده ها. بین المللی J. Remote Sens. 2007 ، 28 ، 4609-4623. [ Google Scholar ] [ CrossRef ]
- فودی، جنرال موتورز; بوید، دی اس؛ سانچز-هرناندز، سی. نقشه برداری یک کلاس خاص با مجموعه ای از طبقه بندی کننده ها. بین المللی J. Remote Sens. 2007 ، 28 ، 1733-1746. [ Google Scholar ] [ CrossRef ]
- واسکه، بی. ون در لیندن، اس. بندیکتسون، جی. رابه، ا. Hostert, P. حساسیت ماشینهای بردار پشتیبان به انتخاب ویژگی تصادفی در طبقهبندی دادههای ابرطیفی. IEEE Trans. Geosci. Remote Sens. 2010 , 48 , 2880-2889. [ Google Scholar ] [ CrossRef ]
- اسمیت، کامپیوتر; دلپیان، اس جی. شوونگرت، RA ارزیابی کیفیت الگوریتمهای طبقهبندی تصویر برای نقشهبرداری پوشش زمین: یک بررسی و یک پیشنهاد برای یک رویکرد مبتنی بر هزینه. بین المللی J. Remote Sens. 1999 ، 20 ، 1461-1486. [ Google Scholar ] [ CrossRef ]
- Giacinto, G. رویکردی به طراحی خودکار سیستم های طبقه بندی کننده چندگانه. تشخیص الگو Lett. 2001 ، 22 ، 25-33. [ Google Scholar ] [ CrossRef ]
- کونچوا، LI; Whitaker, CJ اندازهگیری تنوع در گروههای طبقهبندی کننده و رابطه آنها با دقت گروه. ماخ فرا گرفتن. 2003 ، 51 ، 181-207. [ Google Scholar ] [ CrossRef ]
- بریمن، ال. پیش بینی کننده های بگینگ. ماخ فرا گرفتن. 1996 ، 24 ، 123-140. [ Google Scholar ] [ CrossRef ]
- خو، ال. کریزاک، ا. Suen, CY روشهای ترکیب طبقهبندیکنندههای چندگانه و کاربردهای آنها در تشخیص دستنویس. IEEE Trans. سیستم مرد سایبرن. 1992 ، 22 ، 418-435. [ Google Scholar ] [ CrossRef ]
- رحمان، AFR; Fairhurst، MC مجموعه ای از متخصصان متعدد: ارزیابی یکپارچه. الگوی مقعدی Appl. 1999 ، 2 ، 292-311. [ Google Scholar ] [ CrossRef ]
- دو، پ. شیا، جی. ژانگ، دبلیو. تان، ک. لیو، ی. لیو، اس. سیستم طبقه بندی کننده چندگانه برای طبقه بندی تصاویر سنجش از دور: یک بررسی. Sensors 2012 , 12 , 4764-4792. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- آبه، بی تی؛ Olugbara, OO; مروالا، T. معاملات IAENG در مورد فن آوری های مهندسی. در طبقه بندی تصاویر فراطیفی با استفاده از روش های یادگیری ماشین ; Springer Netherlands: Dordrecht, The Netherlands, 2014; صص 555-569. [ Google Scholar ]
- پونتیوس جونیور، آر جی. میلونز، ام. مرگ بر کاپا: تولد اختلاف کمیت و اختلاف تخصیص برای ارزیابی دقت. بین المللی J. Remote Sens. 2011 ، 32 ، 4407-4429. [ Google Scholar ] [ CrossRef ]
- Iiames، JS; Congalton، RG; تغییرات Lunetta، تحلیلگر RS مرتبط با طبقهبندی تصویر پوشش زمین دادههای Landsat ETM+ برای ارزیابی محصولات پوشش زمین منطقهای/جهانی وضوح فضایی درشت. GIScience Remote Sens. 2013 ، 50 ، 604-622. [ Google Scholar ]
- Ogura, AT Relação e Previsibilidade de Eventos Meteorológicos Extremos Deflagadores de Acidentes de Movimentos de Massa na Serra do Mar ; IPT (Instituto de Pesquisa e Tecnologia): سائوپائولو، برزیل، 2006. [ Google Scholar ]
- Manfre, LA Identificação e Mapeamento de Áreas de Deslizamento Associadas a Rodovias Utilizando Imagens de Sensoriamento Remoto. Ph.D. پایان نامه، Escola Politécnica da Universidade de São Paulo, São Paulo, Brazil, 2015. [ Google Scholar ]
- Wolle, CM Análise dos Escorregamentos Translacionais Numa Região da Serra do Mar no Contexto de Uma Classificação de Mecanismos de Instabilização de Encostas. Ph.D. پایان نامه، Escola Politécnica da Universidade de São Paulo, São Paulo, Brazil, 1988. [ Google Scholar ]
- تولدو، JMA Crop Discrimination با استفاده از تحلیل هارمونیک داده های سری زمانی EVI Modis. پایان نامه کارشناسی ارشد، Instituto Nacional de Pesquisas Espaciais، São José dos Campos، برزیل، 2008. [ Google Scholar ]
- ما، اچ. Qin، Q. Shen, X. تقسیم بندی سایه و جبران در تصاویر ماهواره ای با وضوح بالا. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور، بوستون، MA، ایالات متحده آمریکا، 7-11 ژوئیه 2008; جلد 2، ص 1036–1039.
- کانونگو، تی. کوه، DM; نتانیاهو، NS; پیاتکو، سی دی; سیلورمن، آر. Wu، AY یک الگوریتم خوشه بندی k-means کارآمد: تجزیه و تحلیل و پیاده سازی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2002 ، 24 ، 881-892. [ Google Scholar ] [ CrossRef ]
- Lo, CP; Choi, J. یک رویکرد ترکیبی برای نقشه برداری کاربری زمین شهری/پوشش با استفاده از تصاویر لندست 7 پیشرفته تماتیک Mapper Plus (ETM+). بین المللی J. Remote Sens. 2004 ، 25 ، 2687-2700. [ Google Scholar ] [ CrossRef ]
- نمور، اچ. چیبانی، ی. ماشینهای بردار پشتیبان چندگانه برای تشخیص تغییر پوشش زمین: برنامهای برای نقشهبرداری پسوندهای شهری. ISPRS J. Photogramm. Remote Sens. 2006 , 61 , 125-133. [ Google Scholar ] [ CrossRef ]
- Otukei، JR; Blaschke، T. ارزیابی تغییر پوشش زمین با استفاده از درخت های تصمیم، ماشین های بردار پشتیبان و الگوریتم های طبقه بندی حداکثر احتمال. بین المللی J. Appl. زمین Obs. Geoinf. 2010 ، 12 ، S27–S31. [ Google Scholar ] [ CrossRef ]
- پتروپولوس، GP; Vadrevu، KP; زانتوپولوس، جی. کارانتونیاس، جی. Scholze، M. مقایسه نگاشت زاویه طیفی و طبقهبندیکنندههای شبکه عصبی مصنوعی همراه با تحلیل تصاویر Landsat TM برای به دست آوردن نقشهبرداری ناحیه سوخته. Sensors 2010 ، 10 ، 1967-1985. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- رعناوانا، ر. Palade، V. سیستم های چند طبقه بندی: بررسی و نقشه راه برای توسعه دهندگان. بین المللی J. Hybrid Intel. سیستم 2006 ، 3 ، 1-41. [ Google Scholar ] [ CrossRef ]
- تستود، ج. اوری، اس. سیاه، RA; آماینک، پ. Dou, X. مفهوم توزیع “نرمال” برای توصیف طیف قطرات باران: ابزاری برای فیزیک ابر و سنجش از دور ابر. J. Appl. هواشناسی 2001 ، 40 ، 1118-1140. [ Google Scholar ] [ CrossRef ]
- Tso، GKF؛ Yau، KKW پیش بینی مصرف انرژی برق: مقایسه تحلیل رگرسیون، درخت تصمیم و شبکه های عصبی. انرژی 2007 ، 32 ، 1761-1768. [ Google Scholar ] [ CrossRef ]
- Ghose، MK; پرادان، ر. Ghose، SS Decision درختی طبقه بندی داده های ماهواره ای سنجش از دور با استفاده از ماتریس تفکیک پذیری طیفی. بین المللی J. Adv. محاسبه کنید. علمی Appl. 2010 ، 1 ، 93-101. [ Google Scholar ]
- وو، اف. ژان، جی. یان، اچ. شی، سی. هوانگ، جی. نقشه برداری پوشش زمین بر اساس رویکرد داده کاوی فضایی چندمنبعی برای شبیه سازی آب و هوا: مطالعه موردی در اکوتون کشاورزی-شمالی شمال چین. Adv. هواشناسی 2013 , 2013 . [ Google Scholar ] [ CrossRef ]
- Blaschke, T. تجزیه و تحلیل تصویر مبتنی بر شی برای سنجش از راه دور. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 2-16. [ Google Scholar ] [ CrossRef ]
- Congalton، RG مروری بر ارزیابی دقت طبقهبندی دادههای سنجش از دور. سنسور از راه دور محیط. 1999 ، 37 ، 35-46. [ Google Scholar ] [ CrossRef ]
- هو، TK; هال، جی جی. Srihari، SN در مورد سیستم های طبقه بندی کننده چندگانه برای تشخیص الگو. در مجموعه مقالات یازدهمین کنفرانس بین المللی IEEE در مورد شناسایی الگوها، لاهه، هلند، 30 اوت تا 3 سپتامبر 1992. پ. 84.
- بن عبدالله، AC; فریگی، اچ. Gader, P. همجوشی محلی تطبیقی با انتگرال های فازی. IEEE Trans. سیستم فازی 2012 ، 20 ، 849-864. [ Google Scholar ] [ CrossRef ]
- تیان، جی. لیو، جی. زی، ی. یانگ، ز. ژوانگ، دی. Niu, Z. تحلیل الگوی دینامیکی مکانی-زمانی و نیروهای محرک زمین شهری در چین در دهه 1990 با استفاده از تصاویر TM و GIS. شهرها 2005 ، 22 ، 400-410. [ Google Scholar ] [ CrossRef ]
- لورنزی، ال. ملگانی، ف. Mercier, G. یک زنجیره پردازش کامل برای تشخیص و بازسازی سایه در تصاویر VHR. IEEE Trans. Geosci. Remote Sens. 2012 , 50 , 3440–3452. [ Google Scholar ] [ CrossRef ]
- مانفره، لس آنجلس؛ شینوهارا، ای جی. سیلوا، جی بی. Siqueira، RNP; Giannotti، MA; روش Quintanilha، JA برای شناسایی زمین لغزش در سواحل ایالت سائوپائولو، برزیل. Geociências 2014 ، 33 ، 172-180. [ Google Scholar ]
- ووزنیاک، م. گرانیا، ام. Corchado، E. بررسی سیستم های طبقه بندی کننده چندگانه به عنوان سیستم های ترکیبی. Inf. فیوژن 2014 ، 16 ، 3-17. [ Google Scholar ] [ CrossRef ]
- کیتلر، جی. هاتف، م. دوین، آر. Matas, J. در مورد ترکیب طبقه بندی کننده ها. IEEE Trans. الگوی مقعدی ماخ هوشمند 2006 ، 20 ، 226-239. [ Google Scholar ] [ CrossRef ]
- لیسیاک، ر. کورزینسکی، م. Woloszynski، T. انتخاب بهینه طبقهبندیکنندههای گروهی با استفاده از معیارهای شایستگی و تنوع طبقهبندیکنندههای پایه. محاسبات عصبی 2014 ، 126 ، 29-35. [ Google Scholar ] [ CrossRef ]
- مورنو-سیکو، اف. اینستا، جی. دی لئون، پی. Mico, L. مقایسه روش های همجوشی طبقه بندی کننده برای طبقه بندی در وظایف تشخیص الگو. در شناخت الگوی ساختاری، نحوی و آماری ؛ Springer: برلین، آلمان، 2006; ص 705-713. [ Google Scholar ]
- Foody، GM وضعیت ارزیابی صحت طبقه بندی پوشش زمین. سنسور از راه دور محیط. 2002 ، 80 ، 185-201. [ Google Scholar ] [ CrossRef ]
- کروگ، ا. Vedelsby، J. مجموعه های شبکه عصبی، اعتبار سنجی متقابل، و یادگیری فعال. Adv. عصبی Inf. روند. سیستم 1995 ، 7 ، 231-238. [ Google Scholar ]
- براون، جی. وایات، جی. هریس، آر. یائو، ایکس. روشهای ایجاد تنوع: بررسی و طبقهبندی. Inf. فیوژن 2005 ، 6 ، 5-20. [ Google Scholar ] [ CrossRef ]
- مایکل، پ. بندیکتسون، جی. Ioannis، K. اثر توافق طبقهبندیکننده بر دقت طبقهبندیکننده ترکیبی در همجوشی سطح تصمیم. IEEE Trans. Geosci. Remote Sens. 2005 , 39 , 2539–2546. [ Google Scholar ]
- چاندرا، ا. Yao, X. مجموعههای ترکیبی در حال تکامل ماشینهای یادگیری برای تعمیم بهتر. محاسبات عصبی 2006 ، 69 ، 686-700. [ Google Scholar ] [ CrossRef ]
- مقایسه دقت طبقه بندی فودی، GM: آزمون های فرضیه و استفاده از فواصل اطمینان در ارزیابی تفاوت، هم ارزی و عدم حقارت. سنسور از راه دور محیط. 2009 ، 113 ، 1658-1663. [ Google Scholar ] [ CrossRef ]
- جاسینتو، جی. رولی، اف. Fumera, G. انتخاب طبقه بندی کننده های تصویر. الکترون. Lett. 2000 ، 36 ، 420-422. [ Google Scholar ] [ CrossRef ]
- Koc-San, D. ارزیابی تکنیک های مختلف طبقه بندی برای تشخیص گلخانه های شیشه ای و پلاستیکی از تصاویر ماهواره ای WorldView-2. J. Appl. Remote Sens. 2013 ، 7 . [ Google Scholar ] [ CrossRef ]
- واسکه، بی. ون در لیندن، اس. اولدنبورگ، سی. جاکیمو، بی. رابه، ا. Hostert، P. imager – یک پیاده سازی کاربر محور برای تجزیه و تحلیل تصویر سنجش از دور با جنگل های تصادفی. محیط زیست مدل. نرم افزار 2012 ، 35 ، 192-193. [ Google Scholar ] [ CrossRef ]
- لیو، جی. پان، ی. زو، ایکس. Zhu, W. استفاده از معیارهای فنولوژیکی و روش همجوشی طبقهبندیکننده چندگانه برای نقشهبرداری انواع پوشش زمین. J. Appl. Remote Sens. 2014 , 8 , 083691. [ Google Scholar ] [ CrossRef ]

شکل 1. موقعیت منطقه مورد مطالعه (میدان سیاه) و تصویری از زخم زمین لغزش در حوضه آبخیز پیلوس. منبع: تصویر زمین لغزش از [ 32 ].
شکل 2. نمودار جریان روش مورد استفاده در این مطالعه.
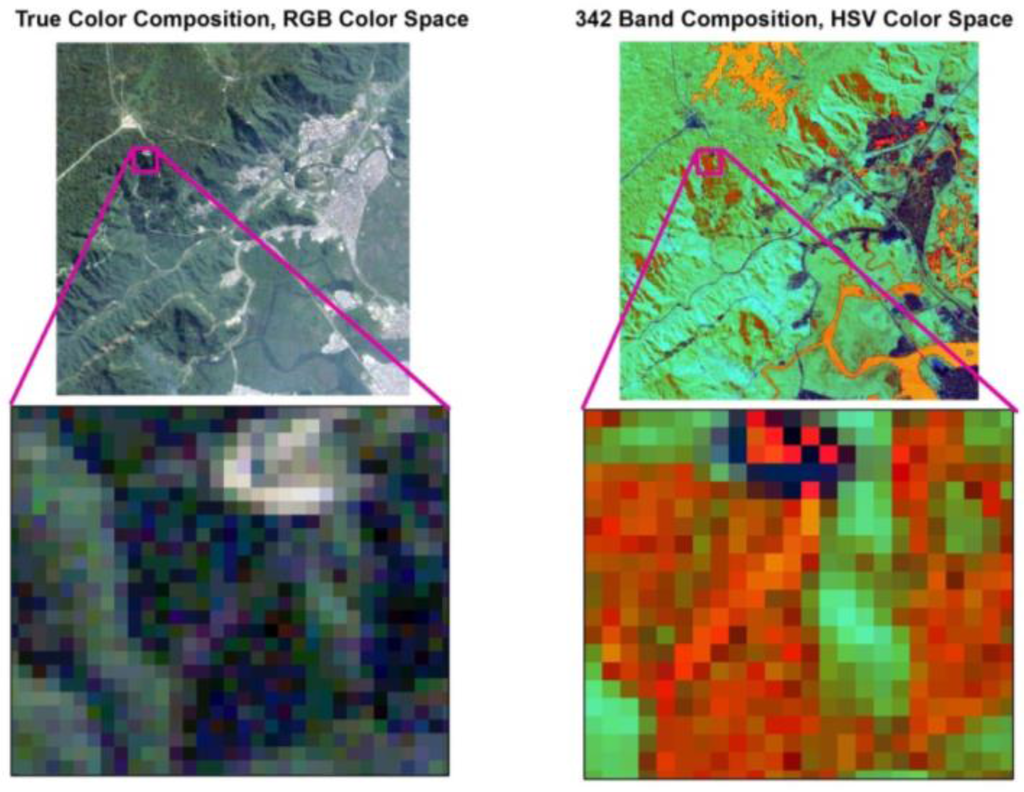
شکل 3. نمونه صحنه LANDSAT 219-077 (25 ژوئن 2000) که در فضای رنگی RGB و HSV نمایش داده شده است.
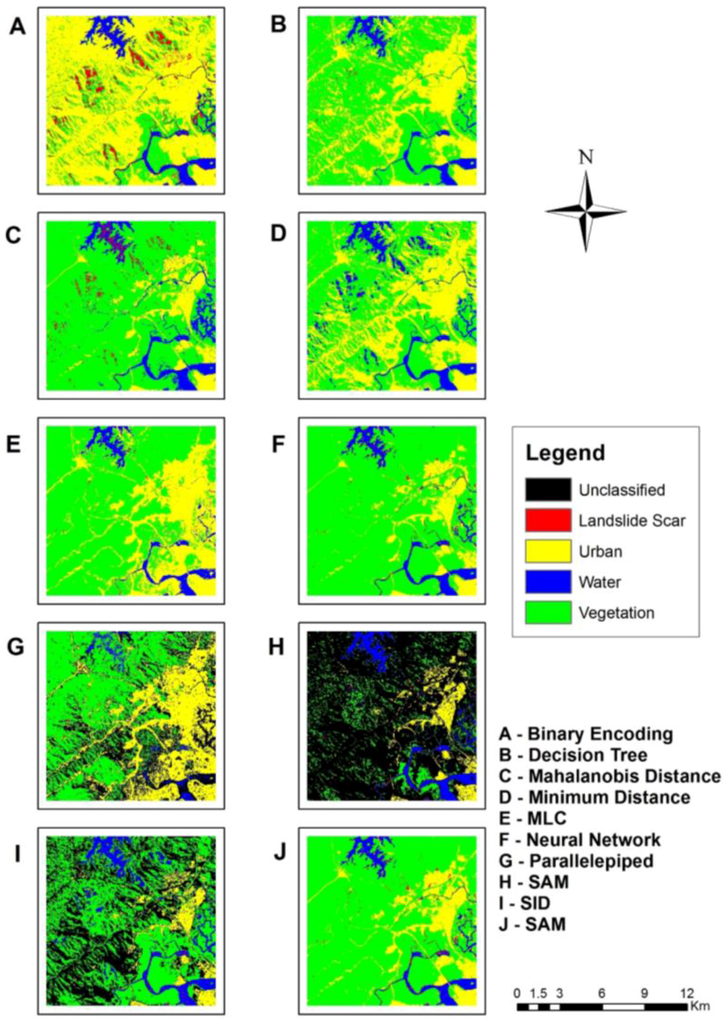
شکل 4. نقشه های طبقه بندی برای هر الگوریتم. ( الف ) رمزگذاری باینری. ( ب ) درخت تصمیم. ( ج ) فاصله ماهالانوبیس; ( د ) حداقل فاصله؛ ( E ) طبقه بندی حداکثر احتمال. ( F ) شبکه های عصبی; ( ز ) موازی ؛ ( H ) SAM; ( I ) SID; ( J ) SVM.
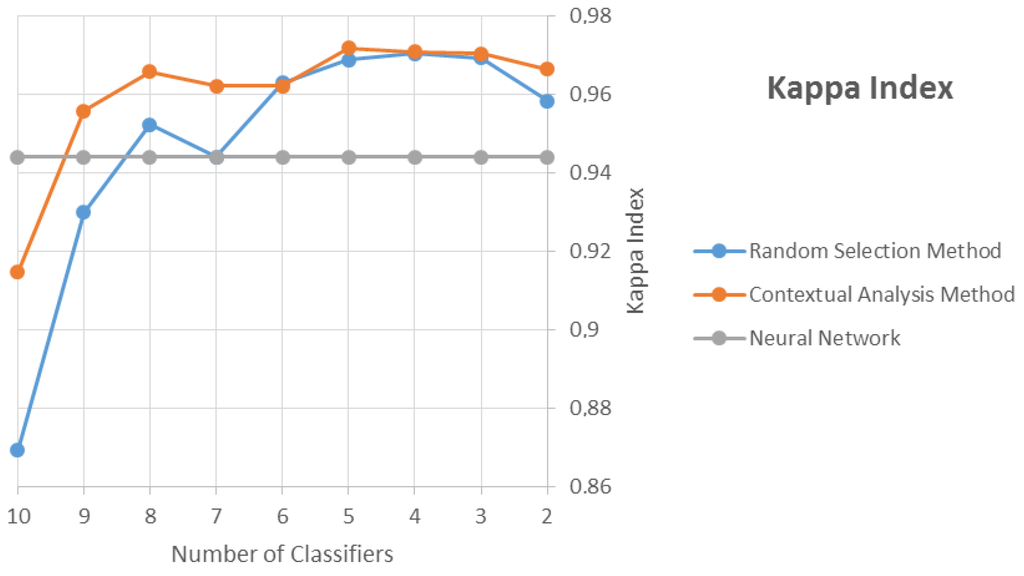
شکل 5. تکامل ضریب کاپا برای نتایج مجموعه های طبقه بندی کننده.
شکل 6. تکامل دقت کلی برای گروه های طبقه بندی کننده.
شکل 7. تکامل خطاهای کمیسیون برای گروه های طبقه بندی کننده.
شکل 8. تکامل خطاهای حذف برای گروه های طبقه بندی کننده.
شکل 9. تکامل احتمال طبقه بندی صحیح برای گروه های طبقه بندی کننده.
شکل 10. طبقه بندی نهایی شامل سه الگوریتم (SVM، NN و MLC) و رویکرد تحلیل زمینه ای برای شکست کراوات.
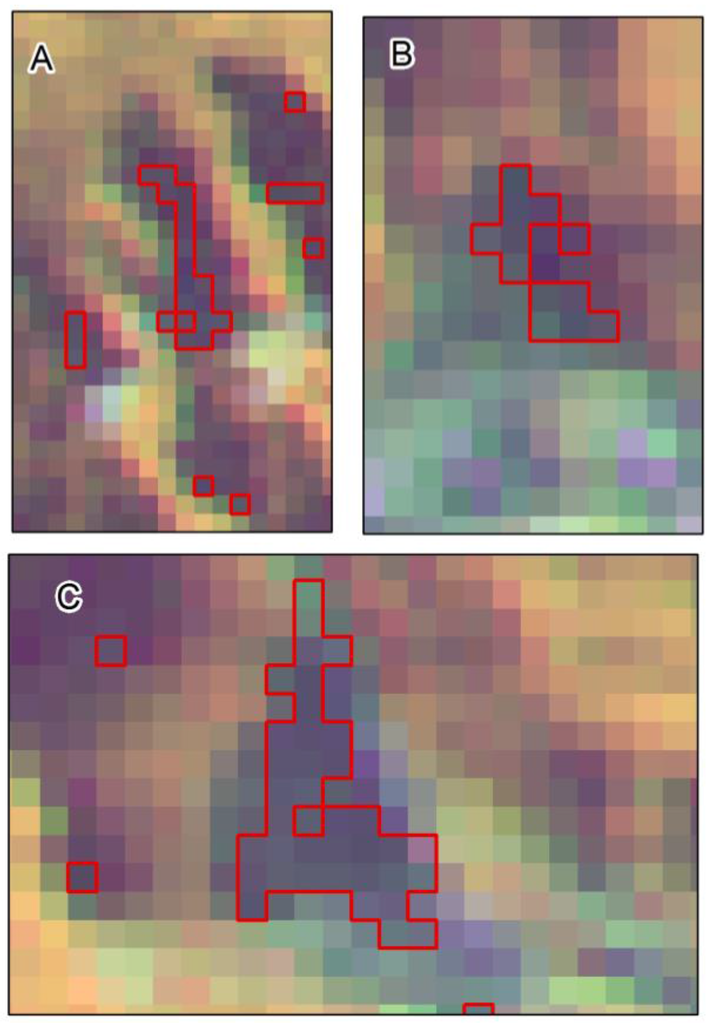
شکل 11. ویژگی های اضافی زمین لغزش شناسایی شده در منطقه مورد مطالعه. ( الف ) رویدادهای رانش زمین در نزدیکی یک بخش جاده رخ داده است. ( ب ) رانش زمین در نزدیکی یک منطقه شهری شناسایی شده است. ( ج ) یک شیب تند از خاک در معرض دید نزدیک یک پالایشگاه نفت.

جدول 1. طبقه بندی کننده های مورد استفاده در هر گروه.
جدول 2. ارزیابی دقت برای هر یک از 10 طبقه بندی کننده.
جدول 3. ارزیابی دقت گروه های طبقه بندی کننده.
جدول 4. مجموعه ای از 10 طبقه بندی کننده ماتریس سردرگمی. ارزیابی طبقهبندی اشتباه در میان طبقهبندیکنندههای مختلف مورد استفاده در این تحلیل.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر