

خلاصه
مدلهای سطح دیجیتال مبتنی بر تصویر استریو (DSM) با وضوح فضایی بسیار بالا (VHSR) میتوانند برای تولید مدلهای ارتفاعی دیجیتال (DEM) استفاده شوند. الگوریتم های فیلتر کردن و تراکم شبکه های نامنظم مثلثی (TIN) رایج ترین رویکردها هستند. بیشتر تکنیک های مبتنی بر فیلتر بر صاف کردن تصویر تمرکز می کنند. ما یک رویکرد جدید را پیشنهاد می کنیم که از تکنیک های تجزیه و تحلیل تصویر مبتنی بر شی یکپارچه (OBIA) استفاده می کند. طبقهبندی اولیه پوشش زمین توسط تشخیص نمونه نقطه زمین پوشش طبقهبندی شده، با استفاده از ویژگیهای خاص شی برای افزایش کیفیت نمونهبرداری دنبال میشود. نمونه های نقطه زمین شناسایی شده به عنوان پایه ای برای درونیابی DEM عمل می کنند. یک شاخص عدم قطعیت منطقه ای (RUI) برای بیان کیفیت DEM تولید شده با توجه به DSM، بر اساس تعداد نمونه در هر شی پوشش زمین محاسبه می شود. نتایج رویکرد ما با تشخیص نور با وضوح بالا و محدوده (LiDAR) -DEM مقایسه میشود، و سطح بالایی از توافق مشاهده میشود – بهویژه برای مناطق بدون پوشش گیاهی و با پوشش گیاهی کم. نتایج نشان میدهد که دقت DEM به شدت به کیفیت DSM اولیه بستگی دارد و – مطابق با RUI – بین کلاسهای مختلف پوشش زمین متفاوت است.
کلید واژه ها:
تجزیه و تحلیل تصویر مبتنی بر شی ; مدل سطح دیجیتال ; مدل دیجیتال ارتفاع ; تصویربرداری استریو ؛ تحول ؛ اتوماسیون ؛ شهری ; ساخته شده
1. معرفی
تصاویر استریو با وضوح فضایی بسیار بالا (VHSR) از سیستمهای حسگر هوابرد (رزولیشن چند سانتیمتر) و فضایی (رزولیشن چند متر تا زیر متر) امکان تولید مدلهای سطح دیجیتال (DSM) را با استفاده از روشهای فتوگرامتری دیجیتال فراهم میکنند. [ 1 ، 2 ، 3]. برای برخی از کاربردها و برای مراحل تجزیه و تحلیل بیشتر، یک مدل ارتفاعی دیجیتالی مشتق از DSM (DEM) و یک DSM نرمال شده متعاقبا (nDSM؛ مربوط به سطح زمین) ایجاد شده مطلوب است. هر دو DSM و DEM مدل های دیجیتال مجزای سطح زمین با تمایز اصلی زیر هستند: یک DSM نشان دهنده سطح زمین با اشیاء سطحی (به عنوان مثال، ساختمان ها، پوشش گیاهی) است، در حالی که یک DEM نشان دهنده سطح زمین لخت است. به عنوان مثال، nDSM ها برای شناسایی ارتفاعات ساختمان یا پوشش گیاهی مفید هستند. به ویژه برای تجزیه و تحلیل ویژگی ها و فرآیندهای طبیعی مانند زمین لغزش [ 4 ، 5 ]، شکل زمین [ 6]]، یا سازه های دست ساز (مانند معادن روباز)، DEM ها بر DSM ها ترجیح داده می شوند، زیرا مدل های مبتنی بر فیزیکی نیاز به کار با داده های زمین خالی دارند [ 7 ]. nDSM ها به ویژه در مناطق شهری برای خدمت به اهدافی مانند استخراج ویژگی های سه بعدی ساختمان های شهری که نشان دهنده ماهیت سه بعدی فضاهای زندگی است و در تخمین جمعیت یا برنامه ریزی شهری مورد نیاز هستند، اهمیت دارند [8 ، 9 ، 10 ] . برای پاسخگویی به تقاضای فزاینده برای چنین DEM های دقیق، الگوریتم های تولید DEM قوی و خودکار مورد نیاز است [ 11 ].
برای تولید DEM از مجموعه دادههای DSM، روشهایی هم برای تشخیص نور و محدوده (LiDAR) و هم برای حوزه تصویر استریو [ 12 ، 13 ] در دسترس هستند. در حوزه LiDAR، تکنیکها از فیلتر کردن مورفولوژیکی و مبتنی بر کانتور تا تکنیکهای تراکم، طراحی شده برای حذف سیگنال بالای زمین در ابرهای نقطهای هستند. یک بررسی جامع توسط منگ و همکاران ارائه شده است. [ 14 ]. تنها چند رویکرد استاندارد شده را می توان برای فیلتر DSMهای تولید شده از تصاویر استریو ماهواره ای شناسایی کرد. اینها فیلتر مبتنی بر شیب یا مورفولوژیکی و تراکم TIN هستند [ 14 ، 15]]. بهینهسازی و بهبود مستمر رویکردهای فوق از طریق روشهای یادگیری آماری مانند شبکههای عصبی مصنوعی یا الگوریتمهای ژنتیک [ 16 ]، روشهای فیلتر تطبیقی [ 17 ]، سطوح برازش محلی در دادهها [ 18 ]، روشهای فیلتر مبتنی بر حجم [ 19] به دست میآیند. ]، فیلتر وابسته به شیب [ 20 ]، و فیلتر وابسته به شیب چند جهته [ 21 ] یا منطقه سازی مبتنی بر شیب و درون یابی بعدی [ 22 ، 23 ]. همه این تکنیک ها نیاز به تنظیم حداکثر اندازه فیلتر، مقدار آستانه مشخص یا حداقل درجه بالایی از آگاهی از هدف برنامه DEM دارند.24 ]. در مجموع، این رویکردها به میزان بالایی از تعامل کاربر-الگوریتم نیاز دارند و کاربر باید در تولید DEM با تجربه باشد.
در مقایسه با DSM های LiDAR، DSM های تصویری استریو ماهواره ای دارای معایبی نسبت به تولید DEM هستند: (1) وضوح فضایی DSM های مشتق شده از LiDAR از چند سانتی متر تا چند متر متغیر است. برای تصاویر استریو ماهواره ای تجاری، وضوح فضایی درشت تری در حدود 1 تا 10 متر برای DSM های مشتق شده بدست می آید [ 11]]؛ (2) به دلیل استراتژیهای مختلف اکتساب، فقط مدلهای سطح و زمین را میتوان مستقیماً از جفتهای استریو ماهوارهای استخراج کرد، در حالی که با LiDAR بازگشتهای چندگانه از سطوح مختلف ارتفاع (به عنوان مثال، بالای درخت، شاخههای درخت، سطح زمین) اسکن شده به دست میآیند. سطح، امکان محاسبه نه تنها سطح و سطح زمین، بلکه سطوح میانی را نیز فراهم می کند. مقادیر شدت پرتو LiDAR می تواند اطلاعات بیشتری در مورد ویژگی های سطح ارائه دهد [ 25 ، 26 ].
از سوی دیگر، DSMهای تصویری استریو این مزیت را دارند که اطلاعات طیفی اضافی در دسترس است، معمولاً قرمز-سبز-آبی (مرئی) و مادون قرمز نزدیک (NIR) در ترکیب (NIR). =^=^VNIR)، معمولی برای اکثر ماهواره های تجاری VHSR. چنین اطلاعات طیفی می تواند برای طبقه بندی منطقه مورد مطالعه به منظور طبقه بندی و به طور بالقوه بهبود نمونه برداری از نقطه زمین استفاده شود. یک مزیت اضافی DSMهای تصویری استریو این است که می توان آنها را برای اکثر مناطق جهان، از جمله مناطق دورافتاده و غیرقابل دسترس، به دلیل پوشش ماهواره ای تقریباً جهانی بدست آورد [27 ] .
ما یک نمونهبرداری از لایههای پوشش زمین نیمه خودکار را برای استخراج DEM از DSMهای تصویری استریو با استفاده از تکنیکهای تحلیل تصویر مبتنی بر شی خاص (OBIA) پیشنهاد میکنیم. OBIA (برای بررسی دقیق، به Blaschke [ 28 ] و Blaschke و همکاران [ 29 ] مراجعه کنید) روش هایی را برای تجزیه و تحلیل تصاویر با وضوح فضایی بسیار بالا با توصیف واقعیت تصویر شده با استفاده از ویژگی های طیفی، بافتی، فضایی و توپولوژیکی ارائه می دهد. استفاده از مدل داده های شطرنجی-بردار ترکیبی و روش های تحلیل شی گرا (ر.ک. [ 30])، روش های سنتی فیلتر DEM را با تمرکز بر روی اشیاء تصویر به عنوان واحدهای طبقه بندی برای رویکرد استخراج DEM جایگزین می کنیم. مزیت این است که از تأثیرات «نمک و فلفل» در طبقهبندی اولیه پوشش زمین با کار با اشیاء تصویر بخشبندیشده و پرداختن صریحتر به اطلاعات متنی و چیدمان اشیاء برای نمونهبرداری طبقهبندیشده بهبودیافته، جلوگیری شود. با توجه به محدودیت های ذکر شده DSM های تصویری استریو در مقایسه با روش های LiDAR برای مناطق پوشش گیاهی (به ویژه جنگل ها)، ما عمدتاً بر مناطق شهری در مناظر مسطح تا مواج تمرکز می کنیم. برای اطمینان از سطح بالایی از قابلیت انتقال و درجه پایین پارامترسازی مورد نیاز، رویکرد پیشنهادی در ابتدا داده های ورودی را در طبقات عمومی پوشش زمین طبقه بندی می کند (ر.ک. [ 31]]). جداسازی اشیاء پوشش زمین از سطح زمین و شناسایی نمونه های خاص پوشش زمین با استفاده از ویژگی های سلسله مراتبی و هندسی انجام می شود. برای شناسایی نمونههای نقطه زمین، ما رویکردی را پیشنهاد میکنیم که توسط اندازه فیلتر تعریفشده توسط کاربر محدود نمیشود و تنظیمات کاربر محور را کاهش میدهد. شاخص عدم قطعیت منطقه ای (RUI) برای ارائه یک نشانه قابلیت اطمینان از DEM تولید شده پیشنهاد شده است.
2. منطقه مطالعه و داده ها
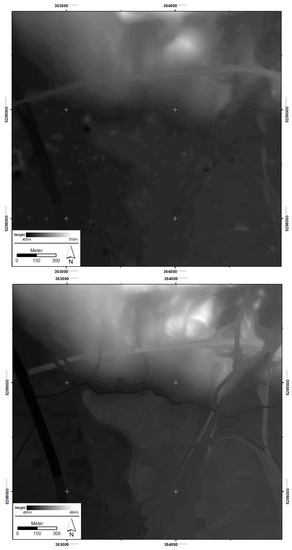
منطقه مورد مطالعه برای این تحقیق قسمت شمالی شهر سالزبورگ اتریش بود که در سمت چپ شکل 1 نشان داده شده است . وسعت حدود 2.5 کیلومتر در 2.5 کیلومتر بود. این منطقه عمدتاً با ویژگی های منطقه ساخته شده مشخص می شود، اما همچنین شامل برخی از پوشش گیاهی شهری، زمین کشاورزی و جنگل است. زمین منطقه مسطح با شیب تپه ای در شمال است (به قسمت سمت راست شکل 1 مراجعه کنید ).
یک تصویر استریو در 28 مه 2013 توسط ماهواره Pléiades گرفته شد. ماهواره داده های تصویری با کیفیت بالا را ارائه می دهد که برای تولید DSM مناسب است [ 32 ]. DSM (ر.ک. سمت راست شکل 1 ) در مرکز هوافضای آلمان (DLR) با استفاده از زنجیره پردازش چند استریوی سیستم پیش پردازش کاملاً خودکار «Catena» [ 33] محاسبه شد.]. تصاویر ماهواره ای پانشارپن شده به ترتیب دارای وضوح فضایی 0.7 متر و DSM 1 متر هستند. مجموعه دادههای DSM و DEM مشتق شده از LiDAR از سال 2006 به عنوان مرجع زمینی برای اعتبارسنجی نتیجه عمل کرد. هر دو مجموعه داده مشتق شده از LiDAR دارای وضوح فضایی 1 متر، برابر با DSM استریو Pléiades هستند. در مناظر شهری اروپای مرکزی، سطح زمین به طور قابل توجهی تغییر نمی کند. از این رو، فاصله زمانی بین دو منبع داده، اعتبار سنجی را مختل نمی کند.
3. روش شناسی
مقایسه اولیه DSM مبتنی بر LiDAR و DSM مبتنی بر تصویر استریو انجام شد و بر دو جنبه متمرکز شد: (1) برای تأیید اینکه مجموعه دادههای مبتنی بر LiDAR برای اعتبار سنجی رویکرد جدید برای استخراج DEM واجد شرایط هستند. و (2) برای ارزیابی کیفیت خود DSM تصویر استریو.
گردش کار پیشنهادی برای تولید DEM مبتنی بر شی در شکل 2 نشان داده شده است . مراحل پردازش – از جمله تجزیه و تحلیل لایه شطرنجی، تولید بردار – شی، و طبقه بندی بر اساس قوانین تعریف شده – در CNL (زبان شبکه شناخت) در محیط توسعه نرم افزار eCognition (Trimble Geospatial) [34] برنامه ریزی شدند . گردش کار شامل دو مرحله عمده بود: (1) طبقه بندی پوشش زمین بر اساس مقادیر طیفی و DSM. و (2) نمونه برداری از نقاط زمین طبقه بندی شده توسط طبقه بندی پوشش زمین [ 35 ]. همراه با تصاویر VNIR، DSM به عنوان ورودی برای بخشبندی چند رزولوشن عمل کرد [ 36] برای تعریف مناطقی با اطلاعات طیفی مشابه و ارتفاع مشابه. با توجه به ویژگیهای عمومی طبقات پوشش زمین اعمال شده، یک خط کشی درشت از اجسام همگن کافی بود.
یک لایه شیب برای تقسیم منطقه به مناطق مسطح و شیب دار بر اساس آستانه پنج درجه استخراج شد. از منظر ساخت و ساز، مناطقی با شیب مساوی یا کمتر از پنج درجه مسطح در نظر گرفته شدند. تمام مناطق باقی مانده به عنوان شیب دار در نظر گرفته شد. این طبقهبندی زمین بهعنوان ورودی طبقهبندی پوشش زمین زیر برای بهبود ترسیم ویژگیهای سطح، بهویژه در مناطق شیبدار که (به عنوان مثال) ساختمانها میتوانستند بهجای انتقال شدید به سطح شیبدار مجاور تار شده باشند، استفاده میشود.
لایه دیگر یک شاخص ژئومورفومتریک سفارشی به نام “زبری سطح” [ 37 ] بود که از هسته های محلی برای استخراج شاخص های زبری سفارشی استفاده می کند که جنبه های مختلف زبری سطح را ترسیم می کند [ 38 ، 39 ]. ما بر جداسازی پوشش گیاهی مسطح و مرتفع تمرکز می کنیم. برای این منظور یک فیلتر میانه با a 15 × 1515×15ثابت شده است که پنجره پیکسل اعمال شده در DSM اصلی نتایج خوبی را ایجاد می کند. از این رو، اندازه پنجره برای همه موارد کاربردی رویکرد ثابت شد. DSM صاف شده از DSM اصلی کم شد و در نتیجه یک لایه توپوگرافی باقیمانده یا لایه زبری سطح ایجاد شد. از آنجایی که یک DSM صاف شده از DSM اصلی کم میشود، زبری سطح تولید شده عمدتاً تحت تأثیر ویژگیهای شیبدار زمین است. با اجرای یک هسته کوچک توانستیم خواص زبری تاج درخت را حفظ کنیم. طبقهبندی اولیه پوشش زمین زیر بر مقادیر طیفی و ارتفاعی و دو لایه زمین فوقالذکر تکیه داشت.
مشابه رویکرد مورد استفاده توسط Lohmann [ 31 ]، طبقات پوشش زمین مورد استفاده در این رویکرد (نگاه کنید به جدول 1 ) عمومی نگه داشته شدند تا نمونهگیری در اکثر مجموعههای داده DSM بهبود یابد، و از قابلیت انتقال رویکرد به یک اطمینان حاصل شود. طیف وسیعی از محیط ها مفروضات زیر مطرح شد: برای طبقات پوشش زمین غیر مرتفع، DSM نمایانگر زمین خالی است و بنابراین معادل DEM است. برای کلاس های پوشش زمین مرتفع، تنها مکان های انتخاب شده DSM نشان دهنده زمین خالی است و باید با استراتژی های نمونه گیری پیشرفته شناسایی شوند. شش طبقه پوشش زمین متمایز شد:
-
“مزارع/مرتع”: حاصل از یک مقدار زبری کم و یک شاخص گیاهی تفاوت نرمال شده (NDVI) بالای صفر.
-
“گیاهی مرتفع”: NDVI بالای صفر و انحراف استاندارد لایه زبری بیشتر از 0.5.
-
اجسام آبی: تاریک ترین و عمدتاً بدون شیب اشیاء طیفی. اختلاط با سایه که توسط ویژگی های زمینه ای اجتناب می شود (بدون اشیاء مرتفع همسایه).
-
“خاک برهنه”: طبقه بندی شده با مقدار شاخص بازتاب قهوه ای (BRI) نزدیک به صفر [ 40 ].
-
“Built-up elevated” (ساختمان ها و عناصر زیربنایی مرتفع بزرگ): اشیاء با شیب زیاد، NDVI کم و مقادیر طیفی بالا به این کلاس اختصاص داده شدند. مقایسه مقادیر میانگین ارتفاع DSM با اجسام مجاور فضایی انجام شد تا اطمینان حاصل شود که اشیاء ساخته شده شناسایی شده بالاتر از آستانه ارتفاع نسبی معین (در مقایسه با اطراف) هستند.
-
“Built-up non-Elevated”: اشیایی که هیچ تفاوتی از نظر ارتفاع DSM نسبت به اشیاء مجاور (ویژگی متنی) از خود نشان نمی دهند در حالی که دارای ویژگی های طیفی مشابه با کلاس “Built-up elevated” هستند.
بر اساس اشیاء طبقهبندیشده، یک نمونهبرداری از نقطه زمین خاص حوزه پوشش زمین برای هر شی پوشش زمین انجام شد. سه نوع مختلف از استراتژیهای نمونهگیری نقطه زمین در این مطالعه اجرا شد ( جدول 1 را ببینید): (1) اگر فرض شود که کلاس مقادیر واقعی زمین را نشان می دهد، شی (گروه پیکسل ها) به عنوان یک کل برای تولید DEM در نظر گرفته می شود. (2) برای کلاس “Built-up Elevated”، نمونه برداری از نقطه زمین بر اساس تشخیص حداقل محلی با استفاده از شعاع/مناطق جستجوی انعطاف پذیر تعریف شده توسط مرزهای دقیق اندازه شیء پوشش زمین مربوطه به جای اندازه پنجره ثابت یا تعریف شده توسط کاربر بود. . حداقل پیکسل ارتفاع در شی مربوطه به عنوان نقطه اولیه زمین در نظر گرفته شد. چندین تکرار برای اعتبارسنجی خودکار نقطه زمین شناسایی شده با مقایسه ارتفاع آن با توجه به انحراف از میانگین ارتفاع نقطه زمین اطراف اجرا شد. بدین ترتیب، تنها کمترین مقادیر در بین ویژگیهای مرتفع (به عنوان مثال، شکاف بین ساختمانها یا حیاطها در ساختمانها) برای تولید DEM در نظر گرفته شد. (3) کلاس “Vegetation elevated” دشوارترین کلاس برای استخراج نمونه های نقطه زمین است، زیرا یک DSM استریو هیچ اطلاعاتی در مورد ارتفاع سطح زمین در بین درختان یا بوته های متراکم ارائه نمی دهد (برخلاف داده های ابر نقطه LiDAR). یک روش نمونهبرداری از نقطه زمین برای تشخیص اجسام با اختلاف ارتفاع منفی ≥ 10 متر (آستانه خشن و سازگار، بر اساس تفسیر بصری میانگین ارتفاع پوشش گیاهی در این منطقه) اجرا شد. این اشیاء به عنوان محله هایی با حداقل پوشش گیاهی کم در نظر گرفته می شدند. سپس، یک روش نمونهبرداری از نقطه زمین مشابه نمونهبرداری در “بالا ساخته شده” اعمال شد. با این حال، یک پاکسازی همچنین می تواند نشان دهنده یک درختچه در جنگل یا یک درخت نسبتاً کوچک باشد. بنابراین، نمونه برداری از نقطه زمین در این کلاس مستعد خطا است. با این وجود، داشتن این نقاط زمینی مفید تلقی می شود،
نقاط زمین نمونه برداری به طور منظم فاصله ندارند، و هر چه مقادیر چگالی نمونه برداری کمتر باشد، تأثیر تکنیک درون یابی بیشتر است [ 41 ]. درون یابی همسایگان طبیعی (NaN) مورد استفاده قرار گرفت که قادر است نقاط زمینی با فاصله نامنظم را مدیریت کند و سطوح پیوسته صاف را با نرخ عملکرد خوب درون یابی کند.
یک محاسبه ریشه میانگین مربعات خطا (RMSE) در هر کلاس و انحراف استاندارد (STD) ارتفاع بر حسب متر در هر کلاس به منظور دریافت اظهارات صریح در مورد اعتبار مناطق DEM تولید شده در رابطه با مجموعه داده مرجع LiDAR-DEM انجام شد. .
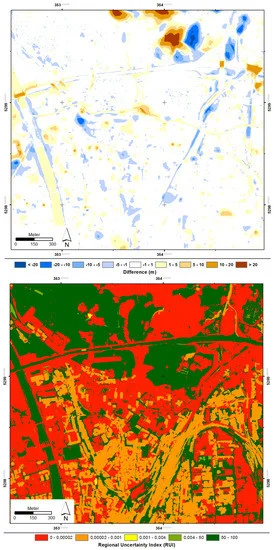
علاوه بر این، ما یک شاخص عدم قطعیت منطقهای را پیشنهاد میکنیم تا اطلاعاتی در مورد تعداد نقاط زمین در دسترس برای هر شیء پوشش زمین ارائه کنیم، و بنابراین کیفیت بالقوه (در مقایسه با DSM) و تغییرات مکانی در کیفیت DEM را نشان میدهیم. RUI نسبت نقاط زمین شناسایی شده است ( =^=^پیکسل) به ازای هر شی پوشش زمین در مقابل تعداد کل پیکسل هایی که شی پوشش زمین مربوطه را تشکیل می دهند. این یک معیار کیفیت بدون بعد با مقادیر 0 تا 100 است. RUI باید به عنوان یک معیار قابلیت اطمینان برای استفاده کننده از DEM عمل کند، به طوری که ناهمگونی نمونه برداری از نقطه زمین (طبقه بندی شده توسط طبقات پوشش زمین) از نظر فضایی واضح باشد.
R Uمنl a n dc o v e ro b j e c t= (∑ ( گرمد _ _ _ _p o i n ts a m p l e sp e rl a n dc o v e ro b j e c t )∑ ( صمن x e l sp e rl a n dc o v e ro b j e c t )) * 100آر�منلآ�دج��ه��ب�هجتی=(∑(���تو�دپ�من�تیسآمترپلهسپه�لآ�دج��ه��ب�هجتی)∑(پمنایکسهلسپه�لآ�دج��ه��ب�هجتی))*100
4. نتایج
همانطور که در روش توضیح داده شد، مقایسه اولیه LiDAR DSM و DSM استریو انجام شد. سمت چپ شکل 3 تغییرات ارتفاع DSM تصویر استریو را در مقایسه با LiDAR DSM نشان می دهد. از آنجایی که DSM استریو مبتنی بر روشهای فتوگرامتری است، لبههای اجسام مرتفع صافتر هستند و هنگام کم کردن LiDAR DSM از DSM استریو قابل مشاهده هستند [ 27 ].
خطاهای ارتفاعی متقارن ممکن است دو دلیل متفاوت داشته باشند: اول، شیب پرتو LiDAR، و دوم، روش فتوگرامتری دو تصویر ماهوارهای غیر نادر. هر دو ممکن است منجر به زوایای متفاوتی شوند که در صورت تفریق قابل مشاهده هستند (به شکل 3 نمای نزدیک a ) مراجعه کنید. همچنین هفت سال اختلاف زمانی بین جمع آوری داده ها وجود دارد. بنابراین تفاوت های مثبت با رشد پوشش گیاهی (بخش شمالی و غربی منطقه مورد مطالعه (ر.ک. شکل 3 نمای نزدیک د ) و کار ساخت و ساز (ر.ک. شکل 3 نمای نزدیک ب ) نیز مرتبط است. (ر.ک. شکل 3 نمای نزدیک ج) و پوشش گیاهی (به عنوان مثال، بریدگی های کوچک شفاف). با توجه به مقایسه DEM های حذف شده از شی سطح، عدم وجود خطاهای بزرگ برای سطوح زمین خالی ثابت می کند که LiDAR-DEM منبع معتبری برای بررسی کیفیت رویکرد است. علاوه بر این، یک محاسبه RMSE در پایان انجام شد.
DEM تولید شده در شکل 4 همراه با مرجع LiDAR-DEM ارائه شده است. شکل 5 یک لایه متمایز (LiDAR-DEM کسر شده از DEM تولید شده) و مقادیر RUI مربوطه را برای تمام طبقات پوشش زمین نشان می دهد، در حالی که شکل 6 nDSM (DSM استریو کسر شده از DEM تولید شده) و طبقه بندی پوشش زمین را نشان می دهد. طبقه بندی شکل 7 ارزیابی کمی را با مقادیر RMSE و انحراف استاندارد ارائه می دهد که هر دو در هر کلاس محاسبه شده اند. بررسی بصری نتایج موارد زیر را نشان داد:
-
نسل DEM برای مناطق مسطح به خوبی کار می کند. تفاوت بین DEM مرجع و DEM تولید شده که در بالای شکل 5 نشان داده شده است، عمدتاً در محدوده ± 1 متر است، که در محدوده خطای دقت ذاتی سنسور ماهواره و روش تطبیق استریو است [42 ] .
-
سطح آب رودخانه سالزاچ به دلیل بارش در روزهای قبل از جمعآوری دادهها بالاتر بود و همچنین ممکن است تحت تأثیر یک نیروگاه برق آبی تازه ساخته (ساخته شده پس از جمعآوری دادههای LiDAR) باشد.
-
اجسام کوچک (به عنوان مثال، عبور رودخانه کوچک از شرق به غرب در پایین شکل 4 ) به سختی در DSM مشتق شده از ماهواره شناسایی می شوند و بنابراین در لایه تفاوت قابل مشاهده هستند.
-
در LiDAR-DEM، پل های ساخته شده توسط انسان حذف شده اند (نگاه کنید به بالا در مقابل پایین شکل 4 ). از آنجایی که رویکرد در این مقاله مبتنی بر مفهوم شکلهای زمین است که توسط [ 43 ] بحث شد، پلها یا خاکریزها از DEM استریو حذف نشدند و بنابراین باعث ایجاد خطاهای مثبت اضافی در لایه تفاوت میشوند که در بالای شکل 5 قابل مشاهده است .
-
طبقه بندی RUI در پایین شکل 5 ، مناطق پوشش زمین را نشان می دهد که در آن تنها چند نقطه زمین شناسایی شده است. این مناطق احتمالاً کمتر قابل اعتماد و دقت کمتری هستند.
-
مناطق با پوشش گیاهی متراکم به دلیل مسائل مربوط به تطابق فتوگرامتری در DSM استریو و نمونههای نقطه زمین بسیار پراکنده یا گم شده، مستعد خطا هستند و بنابراین منجر به خطاهای بزرگ در DEM استریو میشود. این امر به ویژه برای پوشش گیاهی متراکم در سطوح شیب دار [ 44 ] صادق است. اگر ناحیه پوشش گیاهی گنبدها یا سازه های امدادی مشابه (مناطق تپه ای) را بپوشاند، نمونه های نقطه زمین کافی برای تخمین دقیق سطح زیرین را نمی توان یافت.
آخرین واقعیت جالب توجه است، زیرا رویکرد ارائه شده با داده های با فاصله نامنظم برای درونیابی سروکار دارد. کیفیت مجموعه داده های درون یابی تا حد زیادی به ساختار ارتفاع و چگالی داده ها بستگی دارد: (1) در صورتی که چگالی داده های نمونه برداری زیاد باشد، تنوع کمی در داده های درونیابی وجود دارد. (2) اگر چگالی داده های نمونه برداری کم باشد یا اختلاف ارتفاع در ساختار سطح مجموعه داده قوی باشد، ممکن است یک تغییر بزرگ رخ دهد [ 41 ].
نتایج نشان میدهد که این رویکرد قادر به تولید یک DEM از مجموعه دادههای DSM استریو برای مناطق شهری و مناطق مسطح با پوشش گیاهی کم است. ارزیابی کمی DEM تولید شده، یافته های بررسی بصری را تایید می کند. شکل 7 انحراف ارتفاع را به صورت هیستوگرام برای هر کلاس نشان میدهد (رمپ رنگی مشابه بالای شکل 5 ). اکثر مقادیر در محدوده 1± متر هستند. انحراف در “ساخت و ساز بالا” را می توان تا حدی با اختلاف زمانی هفت سال توضیح داد (کار ساخت و ساز، حذف ساختمان). تغییر در “پوشش گیاهی” تنها به دلیل تعداد بسیار کمی از نقاط زمین ایجاد می شود – که با مقادیر کم اندازه گیری RUI نشان داده شده است – که منجر به کیفیت نسبتاً ضعیف DEM، به ویژه در زمین های تپه ای شده است (به شکل 4 مراجعه کنید) .، منطقه شمالی). تغییر مثبت در “آب” به دلیل سطح آب متفاوت است و به عنوان خطا در نظر گرفته نمی شود.
هیستوگرام RMSE برای هر کلاس به طور جداگانه محاسبه شد ( شکل 7 را ببینید ) [ 45 ]. کمترین مقادیر RMSE برای «مزارع/ مرتع»، «خاک غیر مرتفع ساخته شده» و «خاک برهنه» مشاهده شد. آنها کیفیت DSM استریو را در مقایسه با LiDAR DSM نشان می دهند، زیرا DSM استریو اصلی برای این کلاس ها گرفته شده است. این زیربنای کیفیت طبقه بندی پوشش زمین برای این مناطق است.
5. بحث و نتیجه گیری
مسائل مربوط به پوشش گیاهی مرتفع و مناطق شیب دار را می توان به عنوان یک مشکل ذاتی داده DEM ها که از تصاویر استریو مشتق شده است، مشاهده کرد. در زمین های شیب دار، کاربرد روش پیشنهادی محدود است، زیرا اجسام مرتفع اغلب ارتفاعات مشابهی با سطح زمین مجاور نشان می دهند (به عنوان مثال، طرف های رو به شیب ساختمان ها). ما سعی کردیم با استفاده از اطلاعات طیفی موجود به این موضوع بپردازیم. به عنوان مثال، با حذف اشیاء مرتفع و جداسازی زمین های شیب دار بدون پوشش گیاهی از زمین های شیب دار پوشش گیاهی. بدین وسیله، ما تا حدی نقاط زمینی معنیداری را در مناطق شیبدار بازیابی کردیم.
همانطور که برای سایر تکنیک های فیلتر کردن، بسیاری از خطوط شکست یا ناپیوستگی در چشم انداز در طول درونیابی DEM نهایی [ 46 ] هموار شدند. این مورد در مورد عبور رودخانه کوچک ذکر شده از شرق به غرب است.
در مقایسه با سایر کاربردها برای استخراج DEM، رویکرد ارائه شده در این مقاله به هیچ تعریفی از اندازه پنجره فیلتر یا آستانه کاربر محور مشابه بستگی ندارد. اندازه اشیاء پوشش زمین از پیش تعریف نشده است، اما انعطاف پذیر است و فقط به ویژگی ها و ساختار منظره نمایش داده شده در تصاویر بستگی دارد. این می تواند به عنوان یک مزیت قابل توجه در مقایسه با تکنیک های مبتنی بر فیلتر در نظر گرفته شود. در این مقاله، ما یک رویکرد جدید را معرفی کردیم که از مفهوم تحلیل تصویر مبتنی بر شی برای تولید یک DEM از مجموعه دادههای DSM مشتقشده از تصویر استریو استفاده میکند. نمونهبرداری طبقهای شی خاص از نقاط زمین بر اساس کلاسهای پوشش اولیه زمین انجام میشود.
نتایج پتانسیل بالایی از رویکرد را برای مناطقی که با زمین نسبتاً مسطح مشخص میشوند نشان میدهد. برای زمین های شیب دار – به خصوص اگر پوشش گیاهی متراکم داشته باشد – دقت DEM تولید شده محدود است. مقابله با این محدودیت ها باید یکی از اهداف آینده برای بهبود رویکرد باشد. DEM تولید شده به شدت به کیفیت DSM تولید شده از جفت استریو-تصویر و طبقات پایه پوشش زمین وابسته است. این را می توان در توده جنگلی در شمال منطقه مورد مطالعه مشاهده کرد. در اینجا، مقایسه دو مجموعه داده DSM قبلاً تفاوت ها را نشان داد. از این رو، DEM ایجاد شده توسط رویکرد ما نیز مستعد خطا است. با این حال، با یک طبقه بندی مناسب پوشش زمین، می توان سطح درون یابی مربوطه را به حداقل کاهش داد.
برای تجسم این وابستگی ها، ما RUI را پیشنهاد کردیم. RUI یک مقدار عددی اما بدون بعد در محدوده 0 تا 100 است و نقاط نمونه برداری در هر دامنه کلاس پوشش زمین را برای تولید DEM به عنوان یک معیار قابلیت اطمینان منعکس می کند.
تحقیقات بیشتر و بهبود رویکرد با توجه به دو جنبه انجام خواهد شد: (1) در جریان تجزیه و تحلیل، آشکار شد که یک بررسی پیچیده تر از توزیع فضایی نقاط زمین با تجزیه و تحلیل الگوی نقطه ای (به عنوان مثال، میانگین نزدیکترین همسایگان (ANN)، K Ripley میتوانند RUI پیشنهادی را تکمیل کنند. از این رو، یک نشانه عدم قطعیت اضافی می تواند ارائه شود. (2) این رویکرد قبلاً تلاش میکند تا پارامترسازی (تعامل الگوریتم کاربر-کاربر) طبقهبندی اولیه پوشش زمین را به حداقل برساند، زیرا فقط به یک طبقهبندی ناهموار پوشش زمین نیاز است. این می تواند بیشتر مورد بررسی قرار گیرد. برای افزایش قابلیت انتقال بالقوه رویکرد، روشهای پیش طبقهبندی کاملاً خودکار بدون پارامتر باید در نظر گرفته شوند (به عنوان مثال، بارالدی و همکاران [ 47]]).
منابع
- فلورینسکی، IV تجزیه و تحلیل دیجیتالی زمین در علوم خاک و زمین شناسی ، ویرایش دوم. انتشارات آکادمیک: نیویورک، نیویورک، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- لی، ز. زو، سی. Gold, C. مدلسازی دیجیتالی زمین: اصول و روش شناسی ; CRC Press: Boca Raton، FL، USA، 2010. [ Google Scholar ]
- نلسون، ا. رویتر، اچ. Gessler, P. DEM تولید و روش ها. توسعه دهنده علم خاک 2009 ، 33 ، 65-85. [ Google Scholar ]
- دیویت، او. Jasselette, JC; کورنت، ی. ون دم ایکهات، ام. کولینیون، آ. پوسن، جی. دمولین، الف. ردیابی جابجایی های زمین لغزش توسط DTM های چند زمانی: یک رویکرد ترکیبی استریوفتوگرامتری هوایی و LIDAR در غرب بلژیک. مهندس جئول 2008 ، 99 ، 11-22. [ Google Scholar ] [ CrossRef ]
- رازک، کالیفرنیا؛ سانتانجلو، ام. ون وستن، سی جی; Straatsma، MW; de Jong, SM تولید یک DTM بهینه از دادههای اسکن لیزری هوابرد برای نقشهبرداری زمین لغزش در محیط جنگلهای استوایی. ژئومورفولوژی 2013 ، 190 ، 112-125. [ Google Scholar ] [ CrossRef ]
- اندرس، NS; Seijmonsbergen، AC; Bouten، W. بهینه سازی بخش بندی و تجزیه و تحلیل مبتنی بر شی طبقه بندی شده برای نقشه برداری ژئومورفولوژیکی نیمه خودکار. سنسور از راه دور محیط. 2011 ، 115 ، 2976-2985. [ Google Scholar ] [ CrossRef ]
- آیسانک، سی. اسمیت، ام. هیلیر، جی. ارزیابی تقسیمبندی چند تفکیکپذیری برای تعیین حدود طبلها در مدلهای ارتفاعی دیجیتال. ژئومورفولوژی 2014 ، 214 ، 452-464. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- بیلجکی، اف. آرویو اوهوری، ک. لدوکس، اچ. پیترز، آر. Stoter، J. برآورد جمعیت با استفاده از یک مدل شهر سه بعدی: یک مطالعه چند مقیاسی در سطح کشور در هلند. PLoS ONE 2016 , 11 , e0156808. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- توماس، ال. فونسکا، ال. آلمیدا، سی. لئوناردی، اف. Pereira, M. برآورد جمعیت شهری بر اساس حجم ساختمان های مسکونی با استفاده از تصاویر IKONOS-2 و داده های لیدار. بین المللی J. Remote Sens. 2016 ، 37 ، 1-28. [ Google Scholar ] [ CrossRef ]
- وو، اس. کیو، ایکس. وانگ، L. روش های برآورد جمعیت در GIS و سنجش از دور: یک بررسی. GISci. Remote Sens. 2005 ، 42 ، 80-96. [ Google Scholar ] [ CrossRef ]
- دیلمی، ک. هاشم، ام. ماهواره های نوری با وضوح بسیار بالا برای تولید DEM: بررسی. یورو J. Sci. Res. 2011 ، 49 ، 542-554. [ Google Scholar ]
- لی، جی. Heap، AD مروری بر مطالعات تطبیقی روشهای درونیابی فضایی در علوم محیطی: عوامل عملکرد و تأثیر. Ecol. آگاه کردن. 2011 ، 6 ، 228-241. [ Google Scholar ] [ CrossRef ]
- لی، جی. Heap، AD روشهای درونیابی فضایی بکار رفته در علوم محیطی: مروری. محیط زیست مدل. 2014 ، 53 ، 173-189. [ Google Scholar ] [ CrossRef ]
- منگ، ایکس. کریت، ن. ژائو، ک. الگوریتم های فیلتر زمینی برای داده های هوابرد LiDAR: مروری بر مسائل حیاتی. Remote Sens. 2010 , 2 , 833-860. [ Google Scholar ] [ CrossRef ]
- اسماعیل، ز. Jaafar, J. DEM از DSM تولید شده توسط فتوگرامتری با استفاده از فیلتر مورفولوژیکی به دست آمد. در مجموعه مقالات چهارمین کنفرانس تحقیقاتی کارشناسی ارشد کنترل و سیستم IEEE 2013 (ICSGRC)، شاه عالم، مالزی، 19 تا 20 اوت 2013. صص 103-106.
- باقری، ح. صادقیان، س. سجادی، سی ارزیابی استفاده از الگوریتم هوشمند برای درونیابی ارتفاع در نسل DTM. فتوگرام فرنرکوند. اطلاعات جغرافیایی 2014 ، 3 ، 197-208. [ Google Scholar ]
- لو، جی. Wong، DW یک تکنیک درونیابی فضایی وزن دهی با فاصله معکوس تطبیقی. Comput Geosci. 2008 ، 34 ، 1044-1055. [ Google Scholar ] [ CrossRef ]
- مونگوس، دی. لوکاچ، ن. Žalik، B. استخراج زمین و ساختمان از داده های LiDAR بر اساس پروفایل های مورفولوژیکی متفاوت و سطوح برازش محلی. ISPRS J. Photogramm. Remote Sens. 2014 ، 93 ، 145-156. [ Google Scholar ] [ CrossRef ]
- پیلتز، بی. بایر، اس. Poznanska، AM تولید DTM مبتنی بر حجم از DSMهای فتوگرامتری با وضوح بسیار بالا. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2016 ، 41 ، 83-90. [ Google Scholar ] [ CrossRef ]
- گریوی، ا. گرکه، ر. اسپرکلز، وی. Schlienkamp، A. Ableitung eines Geländemodells (Haldenkörper) aus multispektralen UAS-Bilddaten. در DGPF Jahrestagung 2014 (Publikationen der DGPF Band 23) ; سیفرت، ای.، ویرایش. Deutsche Gesellschaft für Photogrammetrie، Fernerkundung und Geoinformation (DGPF) eV: München، آلمان، 2014; صص 1-10. [ Google Scholar ]
- پرکو، آر. راگام، اچ. گوجهر، خ. Schardt, M. نسل پیشرفته DTM از تصاویر استریو ماهواره ای با وضوح بسیار بالا. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2015 ، 2 ، 165-172. [ Google Scholar ] [ CrossRef ]
- بومیر، سی. ادریسا، ام. استخراج DTM از DSM بر اساس مناطق و زمینه یکنواخت. EARsel Proc. 2015 ، 14 ، 16-24. [ Google Scholar ] [ CrossRef ]
- بومیر، سی. مدلهای رقومی زمین برگرفته از مناطق یکنواخت مدل سطح دیجیتال در مناطق شهری. بین المللی J. Remote Sens. 2016 , 37 , 3477–3493. [ Google Scholar ] [ CrossRef ]
- کورزنیوفسکا، ک. فایفر، ن. ماندلبرگر، جی. Lugmayr، A. ارزیابی تجربی ابزارهای استخراج زمین ابر نقطه ای ALS بر روی انواع شیب زمین و انواع پوشش زمین. بین المللی J. Remote Sens. 2014 ، 35 ، 4673-4697. [ Google Scholar ] [ CrossRef ]
- مرسی، س. شاکر، ا. الربانی، ع. دادههای لیدار چندطیفی LaRocque، PE Airborne برای طبقهبندی پوشش زمین و نقشهبرداری زمین/آب با استفاده از شاخصهای طیفی مختلف. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2016 ، 3 ، 217-224. [ Google Scholar ] [ CrossRef ]
- گارسیا، ام. ریانو، دی. چویکو، ای. Danson، FM تخمین ذخایر کربن زیست توده برای یک جنگل مدیترانه ای در مرکز اسپانیا با استفاده از داده های ارتفاع و شدت LiDAR. سنسور از راه دور محیط. 2010 ، 114 ، 816-830. [ Google Scholar ] [ CrossRef ]
- آگیلار، M.Á. دل مار سالدانا، م. Aguilar، FJ تولید و ارزیابی کیفیت DSM استخراج شده استریو از GeoEye-1 و WorldView-2 Imagery. IEEE Trans. Geosci. Remote Sens. 2014 ، 52 ، 1259-1271. [ Google Scholar ] [ CrossRef ]
- Blaschke, T. تجزیه و تحلیل تصویر مبتنی بر شی برای سنجش از راه دور. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 2-16. [ Google Scholar ] [ CrossRef ]
- بلاشکه، تی. هی، جی. کلی، م. لانگ، اس. هافمن، پی. آدینک، ای. فیتوسا، ر. ون در میر، اف. وادر ورف، اچ. ون کویلی، اف. و همکاران تجزیه و تحلیل تصویر مبتنی بر شی جغرافیایی: به سوی یک پارادایم جدید ISPRS J. Photogramm. Remote Sens. 2014 ، 87 ، 180-191. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Tiede, D. یک روش پوشش جغرافیایی جدید برای تجزیه و تحلیل و تجسم الگوهای تغییر فضایی با استفاده از مفاهیم مدلسازی دادههای شی گرا. کارتوگر. Geogr. آگاه کردن. علمی 2014 ، 41 ، 227-234. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Lohmann, P. بخش بندی و فیلتر کردن مدل های سطح دیجیتال اسکنر لیزری. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2002 ، 34 ، 311-316. [ Google Scholar ]
- توپان، ح. کم، ا. اوزندی، م. اوروچ، م. یاکوبسن، ک. پروژه Taşkanat، T. Pléiades: ارزیابی دقت georeferencing، کیفیت تصویر، عملکرد pansharpening و کیفیت DSM/DTM. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2016 ، 41 ، 503-510. [ Google Scholar ] [ CrossRef ]
- کراوس، تی. d’Angelo، P. اشنایدر، ام. Gstaiger, V. سیستم پردازش نوری کاملاً خودکار CATENA در DLR. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2013 ، XL-1/W1 ، 177-181. [ Google Scholar ] [ CrossRef ]
- تاید، دی. لانگ، اس. آلبرشت، اف. Hölbling، D. مدلسازی کلاس مبتنی بر شی برای تعیین محدودیتهای کاداستری ژئواشیاء. فتوگرام مهندس Remote Sens. 2010 ، 76 ، 193-202. [ Google Scholar ] [ CrossRef ]
- لوتجه، اف. تاید، دی. Eisank، C. تولید DTM مبتنی بر شی از مجموعه دادههای DSM برگرفته از تصاویر استریو VHR. جنوب شرقی. یورو J. Earth Observ. Geomat. 2014 ، 3 ، 109-114. [ Google Scholar ]
- بااتز، ام. Schäpe، A. بخشبندی چند رزولوشن: یک رویکرد بهینهسازی برای تقسیمبندی تصویر در مقیاس چندگانه با کیفیت بالا. در مجموعه مقالات 2000 XII Angewandte Geographische Informationsverarbeitung، سالزبورگ، اتریش، 5-7 ژوئیه 2000.
- ترویسانی، س. Rocca، M. MAD: تحلیل بافت تصویر قوی برای کاربردها در ژئومورفومتری با وضوح بالا. محاسبه کنید. Geosci. 2015 ، 81 ، 78-92. [ Google Scholar ] [ CrossRef ]
- Grohmann، CH; اسمیت، ام جی. ریکومینی، سی. تجزیه و تحلیل چند مقیاسی زبری سطح توپوگرافی در دره میدلند، اسکاتلند. IEEE Trans. Geosci. Remote Sens. 2011 ، 49 ، 1200-1213. [ Google Scholar ] [ CrossRef ]
- اسمیت، MW ناهمواری در علوم زمین. علوم زمین Rev. 2014 , 136 , 202-225. [ Google Scholar ] [ CrossRef ]
- مرزلیاک، MN; Gitelson، AA; Chivkunova، OB; سولوچنکو، AE; پوگوسیان، SI کاربرد طیفسنجی بازتابی برای تجزیه و تحلیل رنگدانههای گیاهی بالاتر. راس J. گیاه فیزیول. 2003 ، 50 ، 704-710. [ Google Scholar ] [ CrossRef ]
- چاپلوت، وی. داربوکس، اف. بورنان، اچ. لگوئدویس، اس. سیلورا، ن. Phachomphon، K. دقت تکنیک های درونیابی برای استخراج مدل های ارتفاعی دیجیتال در رابطه با انواع شکل زمین و چگالی داده ها. ژئومورفولوژی 2006 ، 77 ، 126-141. [ Google Scholar ] [ CrossRef ]
- پولی، دی. رموندینو، اف. آنجیولی، ای. Agugiaro، G. ارزیابی رادیومتری و هندسی تصاویر استریو GeoEye-1، WorldView-2 و Pléiades-1A برای استخراج اطلاعات سه بعدی. ISPRS J. Photogramm. Remote Sens. 2015 ، 100 ، 35-47. [ Google Scholar ] [ CrossRef ]
- ایوانز، ژئومورفومتری IS و نقشه برداری لندفرم: شکل زمین چیست؟ ژئومورفولوژی 2012 ، 137 ، 94-106. [ Google Scholar ] [ CrossRef ]
- سیتول، جی. Vosselman, G. مقایسه تجربی الگوریتمهای فیلتر برای استخراج زمین برهنه از ابرهای نقطه اسکن لیزری هوابرد. ISPRS J. Photogramm. Remote Sens. 2004 ، 59 ، 85-101. [ Google Scholar ] [ CrossRef ]
- هوله، جی. Höhle, M. ارزیابی دقت مدلهای ارتفاعی دیجیتال با استفاده از روشهای آماری قوی. ISPRS J. Photogramm. Remote Sens. 2009 , 64 , 398-406. [ Google Scholar ] [ CrossRef ]
- سیتول، جی. ووسلمن، جی. فیلتر کردن داده های اسکنر لیزری هوابرد بر اساس ابرهای نقطه تقسیم شده. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2005 ، 36 ، 66-71. [ Google Scholar ]
- بارالدی، ع. دوریو، ال. سیمونتی، دی. کونچدا، جی. هولکز، اف. Blonda، P. طبقهبندی اولیه مبتنی بر قواعد طیفی خودکار تصاویر SPOT-4/-5/IRS، AVHRR/MSG، AATSR، IKONOS/QuickBird/OrbView/GeoEye و DMC/SPOT-1/-2 کالیبرهشده از نظر پرتوسنجی، بخش I: طراحی و پیاده سازی سیستم. IEEE Trans. Geosci. Remote Sens. 2010 , 48 , 1299-1325. [ Google Scholar ] [ CrossRef ]
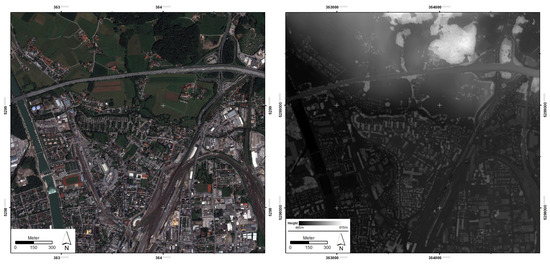
شکل 1. سمت چپ : تصویر ماهوارهای Pléiades-1B، که در 28 مه 2013 به دست آمد، رنگ واقعی با وضوح 0.7 متر تیز شد. سمت راست : دادههای مدل سطح دیجیتال استریو تصویری (DSM)، در مقیاس خاکستری نمایش داده میشود.
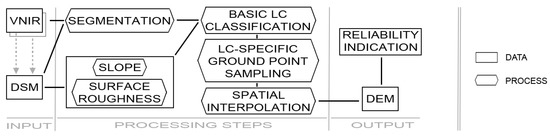
شکل 2. نمای کلی گرافیکی گردش کار بر اساس طبقه بندی پوشش زمین (LC) و نمونه برداری از نقطه زمین (GP) انجام شده در رویکرد پیشنهادی. DSM: مدل سطح دیجیتال; DEM: مدل ارتفاعی دیجیتال; VNIR: نوارهای طیفی قرمز-سبز-آبی و نزدیک مادون قرمز قابل مشاهده است.
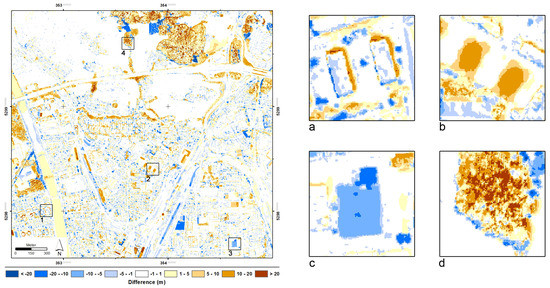
شکل 3. سمت چپ : نقشه تفاوت که تغییرات ارتفاع DSM تصویر استریو را در مقایسه با DSM تشخیص نور و محدوده (LiDAR) نشان میدهد: رنگهای آبی مناطقی را نشان میدهند که DSM تصویر استریو پایینتر از LiDAR DSM است، رنگهای قهوهای نشاندهنده مناطق هستند. که در آن DSM تصویر استریو بالاتر از LiDAR DSM است و نواحی سفید در محدوده [-1/+1 متر] اختلاف هستند. سمت راست : نمای نزدیک از نقشه خطا که ( الف ) باقیماندههای عمودی DSM استریو در اطراف ساختمانها، ( ب ) ساختمانهای جدید، ( ج ) ساختمانهای حذفشده، و ( د ) اختلاف ارتفاع در یک توده جنگلی کوچک را نشان میدهد.
شکل 4. بالا : DEM حاصل از DSM تصویری استریو با استفاده از رویکرد ارائه شده تولید شده است. پایین : DEM مرجع که از داده های LiDAR مشتق شده است.
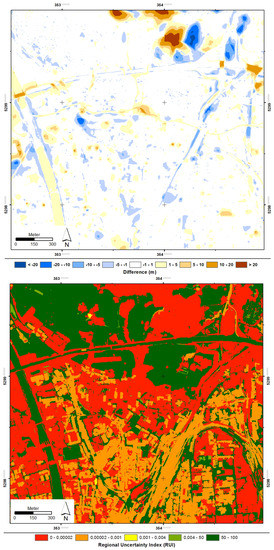
شکل 5. بالا : نقشه خطا که تغییرات ارتفاع DEM تولید شده و مرجع LiDAR-DEM را نشان می دهد. پایین : طبقه بندی RUI برای منطقه مورد مطالعه. مقادیر سبز نرخ نمونه برداری بسیار بالا را نشان می دهد، مقادیر قرمز نشان دهنده نرخ نمونه برداری پایین برای هر شی است.
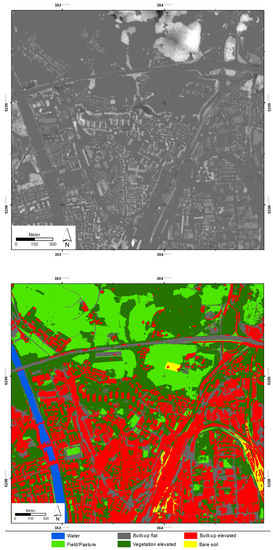
شکل 6. بالا : DSM نرمال شده (nDSM) تولید شده از DSM استریو و DEM تولید شده. پایین : طبقه بندی پوشش اراضی منطقه مورد مطالعه.
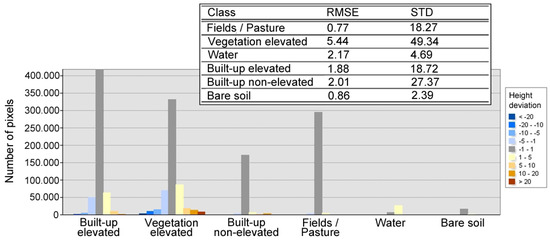
شکل 7. انحراف ارتفاع استریو DEM محاسبه شده در رابطه با مرجع LiDAR-DEM، محاسبه شده برای هر کلاس به طور جداگانه. RMSE: ریشه میانگین مربعات خطا. STD: انحراف استاندارد.

جدول 1. نام کلاس ها برگرفته از لومان [ 31 ]، ویژگی های استخراج به کار رفته در رویکرد، روش های مربوطه برای نمونه برداری DEM و محاسبه مقدار شاخص عدم قطعیت منطقه ای.
© 2017 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر