

خلاصه
اسکنر لیزری موبایل (MLS) ; ابر نقطه ; تصویر پروجکشن ; نمای ساختمان ; مورفولوژی ; استخراج ویژگی
1. معرفی
2. روش شناسی
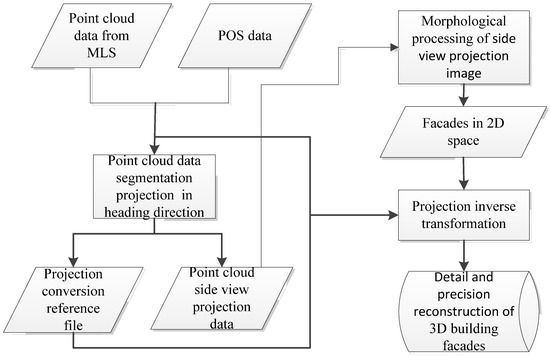
2.1. چارچوب فنی رویکرد پیشنهادی
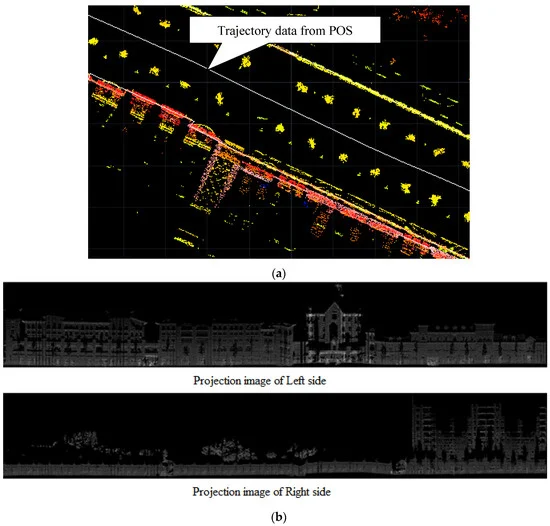
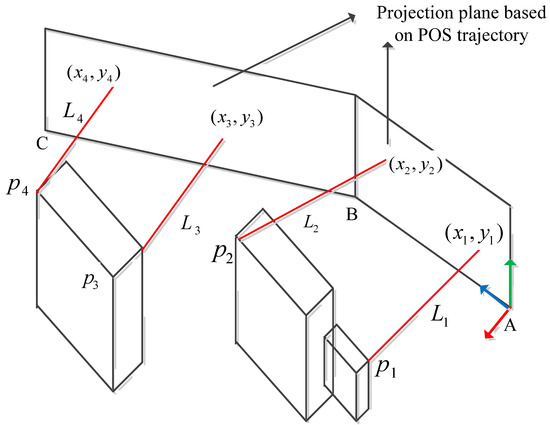
2.2. Project Cloud Point بر اساس POS
جایی که ∣∣Lمن⇀∣∣|��⇀|طول بردار معمولی است Lمن�من، و ∣∣L⇀∣∣حداکثر|�⇀|حداکثرحداکثر طول بردار معمولی تمام نقاط با فاصله مربوط به خط POS است.
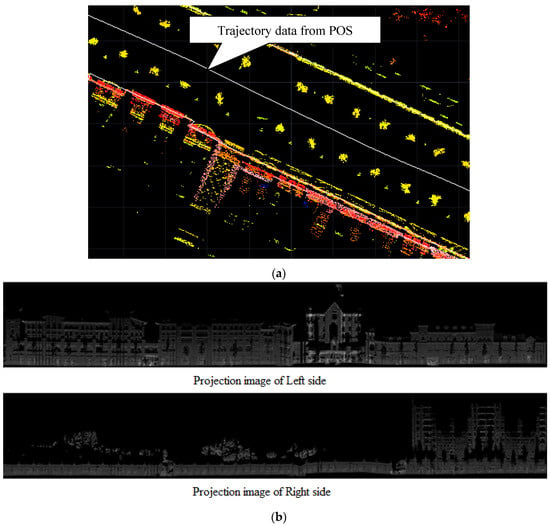
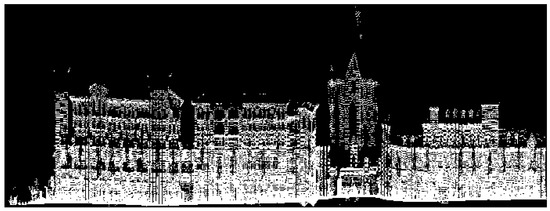
2.3. استخراج نما از تصویر طرح ریزی ابر نقطه ای پس از فیلتر مورفولوژیکی
- ①
-
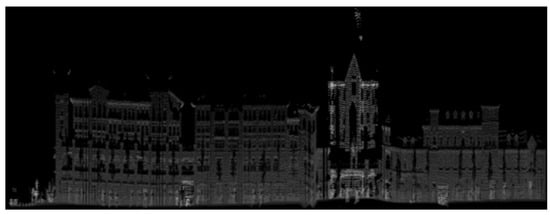
روابط بین هر مقدار خاکستری پیکسل و فاصله LIDAR به صفحه نمایش اشاره می کند. هر چه مقدار خاکستری بزرگتر باشد، از صفحه نمایش دورتر است.
- ②
-
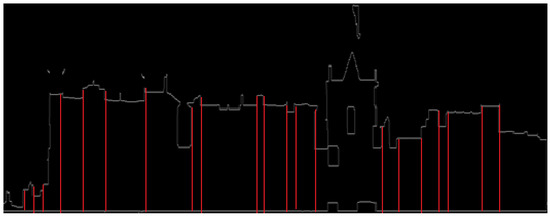
از آنجایی که صفحات پیش بینی انتخاب شده گروهی از نماهای پیوسته ساختمان های مختلف هستند، ممکن است یک تغییر ناگهانی در جهت موقعیت اتصال دو نما ظاهر شود. این در تصاویر به عنوان اطلاعات پیکسلی از دست رفته یک یا چند ستون ظاهر می شود.
جایی که f( x ، y)�(ایکس،�)مقدار خاکستری در صفحه تصویر است ( x ، y)(ایکس،�)، f¯�¯مقدار متوسط خاکستری، N تعداد ابر نقطه و انحراف استاندارد است σ�می توان مانند رابطه (3) محاسبه کرد:
که در آن Row شماره ردیف تصویر طرح ریزی شده و Col شماره ستون تصویر طرح ریزی شده است.
جایی که ⊕⊕نشان دهنده پردازش اتساع، و – نشان دهنده پردازش فرسایش است.
که در آن H ارتفاع تصویر پروجکشن و W عرض تصویر طرح ریزی شده است.
که در آن dF تغییر شکل برآمدگی است. وضوح فضایی را به عنوان حداکثر تغییر شکل طرح ریزی در نظر می گیریم. تغییر شکل طرح ریزی در آزمایش های ما بر اساس وضوح فضایی ابر نقطه کمتر از 0.5 متر بود. dGrid اندازه شبکه نمایش ابر نقطه است.
که در آن l نشان دهنده ستونی با بیشترین گرادیان در پنجره [ j – L ، j + L ] است. سپس آن را ریست می کنیم t ( n )تی(�)معادله (8):
جایی که تی“( n )تی“(�)شیب تنظیم مجدد در پنجره تغییر شکل طرح ریزی L است .
که در آن hW عرض ساختمان است. در مقاله ما hW 5 متر در نظر گرفته شده است. سپس حداکثر گرادیان تیسحداکثرتیحداکثرسدر پنجره S به عنوان موقعیت احتمالی خط تقسیم بندی در نظر گرفته می شود.
که در آن s موقعیت ممکن خط تقسیم بندی را نشان می دهد، همانطور که در رابطه (7) وجود دارد.
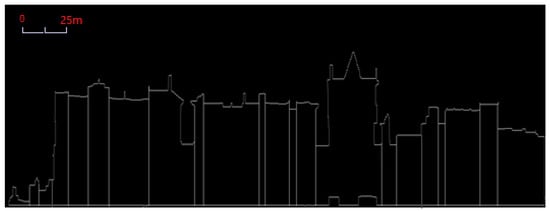
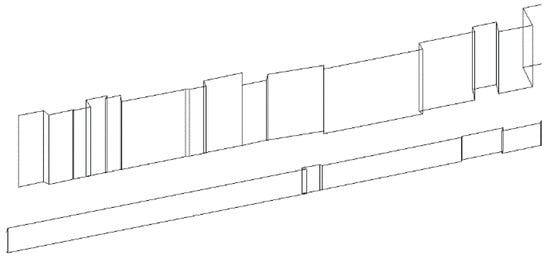
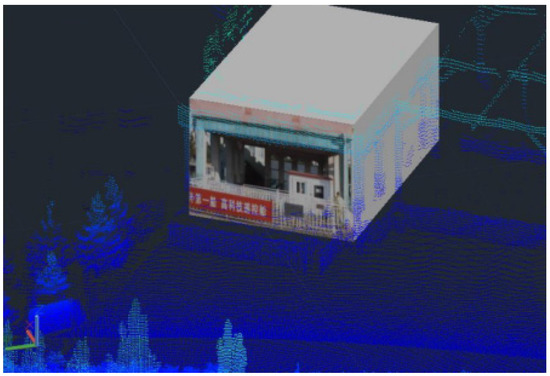
2.4. بازسازی قطعات نمای ساختمان در فضای ابری نقطه سه بعدی
که در آن a ، b ، c ، و d ارجاعات در صفحه هستند، و پ(ایکسمن،yمن،zمن)پ(ایکسمن،�من،�من)می تواند مختصات هر ابر نقطه ای باشد. بدین ترتیب،
3. آزمایش ها و نتایج
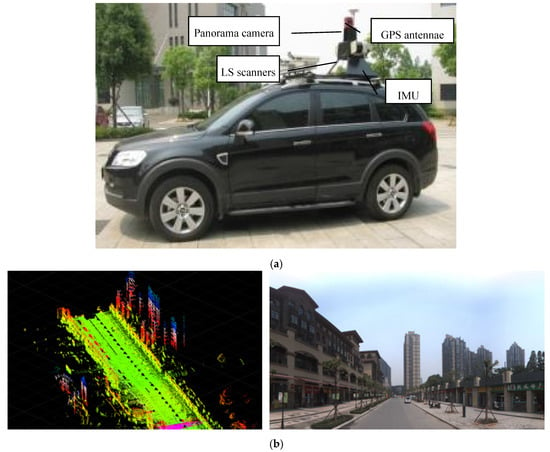
3.1. مجموعه داده ها
3.2. تجزیه و تحلیل نتایج
4. بحث
5. نتیجه گیری ها
منابع
- مجید، ز. چونگ، AK; احمد، ع. ستان، اچ. سامسودین، فتوگرامتری AR و اسکن لیزری سه بعدی به عنوان تکنیک های جمع آوری داده های فضایی برای پایگاه داده ملی جمجمه و صورت. فتوگرام ضبط 2005 ، 20 ، 48-68. [ Google Scholar ] [ CrossRef ]
- Wang, R. مدل سازی ساختمان سه بعدی با استفاده از تصاویر و LIDAR: یک بررسی. بین المللی J. Image Data Fusion 2013 ، 4 ، 273-292. [ Google Scholar ] [ CrossRef ]
- السبرگ، جی. بورمان، دی. Nüchter, A. راه حل های الگوریتمی برای محاسبه دقیق ابرهای نقطه سه بعدی حداکثر احتمال از سیستم عامل های اسکن لیزری سیار. Remote Sens. 2013 , 5 , 5871–5906. [ Google Scholar ] [ CrossRef ]
- پوربا، م. Goulette، F. رویکرد مبتنی بر بخش خط برای ارزیابی دقت ابرهای نقطه MLS در مناطق شهری. در مجموعه مقالات هشتمین سمپوزیوم بین المللی فناوری نقشه برداری موبایل، تاینان، تایوان، 1 تا 3 مه 2013. صص 660-665.
- عجازی، ع.ک. چچین، پ. Trassoudaine, L. تشخیص خودکار و تخمین ویژگی پنجره ها در ابرهای نقطه شهری سه بعدی که از تقارن نما و تناظرهای زمانی بهره می برند. بین المللی J. Remote Sens. 2014 , 35 , 7726–7748. [ Google Scholar ] [ CrossRef ]
- بینگ، LV؛ ژونگ، RF؛ Wang, JN محصولات اسکنر لیزری متحرک با وسیله نقلیه: بررسی. Geomat. تف کردن Inf. تکنولوژی 2012 ، 35 ، 184-187. [ Google Scholar ]
- روتزینگر، ام. هوفل، بی. اود البرینک، اس. Vosselman, G. امکان سنجی استخراج ردپای نما از داده های اسکن لیزری سیار. فتوگرام فرنرکوند. Geoinf. 2011 ، 6952 ، 97-107. [ Google Scholar ] [ CrossRef ]
- روتزینگر، ام. پراتیهاست، AK; البرینک، SJO؛ Vosselman، G. مدلسازی درخت از مجموعه دادههای اسکن لیزری سیار. فتوگرام ضبط 2011 ، 26 ، 361-372. [ Google Scholar ] [ CrossRef ]
- آنگلوف، دی. دولونگ، سی. فیلیپ، دی. کریستین، اف. استفان، ال. Richard, L. نمای خیابان گوگل: ثبت جهان در سطح خیابان. کامپیوتر 2010 ، 43 ، 32-38. [ Google Scholar ] [ CrossRef ]
- هارا، ک. لی، وی. Froehlich، J. ترکیب جمعسپاری و نمای خیابان Google برای شناسایی مشکل دسترسی در سطح خیابان. در مجموعه مقالات کنفرانس SIGCHI در مورد عوامل انسانی در سیستم های محاسباتی، پاریس، فرانسه، 27 آوریل تا 2 مه 2013. صص 631-640.
- توری، ا. هاولنا، م. Pajdla, T. از نمای خیابان گوگل تا مدل های سه بعدی شهر. در مجموعه مقالات کنفرانس بین المللی IEEE در کارگاه های بینایی کامپیوتری، کیوتو، ژاپن، 27 سپتامبر تا 4 اکتبر 2009. ص 2188-2195.
- سمپات، ع. Shan, J. تقسیم بندی و بازسازی سقف های ساختمان های چند وجهی از ابرهای نقطه ای LIDAR هوایی. IEEE Trans. Geosci. Remote Sens. 2010 , 48 , 1554-1567. [ Google Scholar ] [ CrossRef ]
- وانگ، ایکس. Li, P. استخراج ساختمان های فروریخته ناشی از زلزله با استفاده از تصاویر با وضوح بسیار بالا و داده های LIDAR موجود در هوا. بین المللی J. Remote Sens. 2015 ، 36 ، 2163-2183. [ Google Scholar ] [ CrossRef ]
- گیلانی، SAN; اورنجیب، م. Lu, G. یک تکنیک استخراج و تنظیم خودکار ساختمان با استفاده از داده های ابر نقطه LiDAR و orthimage. Remote Sens. 2016 , 8 , 258. [ Google Scholar ] [ CrossRef ]
- هوی، زی؛ هو، YJ; Xu, P. استخراج خودکار ردپای ساختمان از LIDAR با استفاده از روشهای مبتنی بر تصویر ژئو انفورماتیک در مدیریت منابع و اکوسیستم پایدار . Springer: برلین/هایدلبرگ، آلمان، 2015; صص 79-86. [ Google Scholar ]
- سان، اس. Savalggio, C. تشخیص سقف ساختمان پیچیده و توصیف دقیق از دادههای LIDAR و تصاویر هوایی درست شده. در مجموعه مقالات سمپوزیوم علوم زمین و سنجش از دور (IGARSS)، مونیخ، آلمان، 22 تا 27 ژوئیه 2012. جلد 22، ص 5466–5469.
- Arachchige، NH; پررا، SN; Maas, HG پردازش خودکار ابرهای نقطه اسکنر لیزری سیار برای تشخیص نمای ساختمان. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2012 ، XXXIX-B5 ، 187-192. [ Google Scholar ]
- رودریگز-کوئنکا، بی. گارسیا کورتس، اس. اوردونز، سی. آلونسو، MC رویکردی برای شناسایی و ترسیم محدودیتهای خیابان از دادههای ابر نقطه سه بعدی MLS. خودکار ساختن. 2015 ، 51 ، 103-112. [ Google Scholar ] [ CrossRef ]
- یانگ، بی. دونگ، ز. ژائو، جی. Dai, W. استخراج سلسله مراتبی اشیاء شهری از داده های اسکن لیزری سیار. ISPRS J. Photogramm. Remote Sens. 2015 ، 99 ، 45-57. [ Google Scholar ] [ CrossRef ]
- وانگ، جی. جین، FX; لو، های. Lin, ZM استخراج اطلاعات نمای ساختمان بر اساس اسکنر لیزری خودرو. J. شاندونگ دانشگاه. علمی تکنولوژی 2004 ، 23 ، 8-11. [ Google Scholar ]
- هوانگ، ال. لو، XS؛ Chen, CF استخراج اطلاعات نمای ساختمان از داده های اسکن لیزری. علمی Surv. نقشه. 2006 ، 31 ، 141-142. [ Google Scholar ]
- لی، بی جی; لی، QQ; شی، WZ; Wu, FF استخراج و مدلسازی ساختمان شهری از دادههای اسکن لیزری با وسیله نقلیه. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2004 ، 35 ، 934-939. [ Google Scholar ]
- لو، XS؛ روش Huang, L. Grid بر روی اطلاعات ساختمان با استفاده از داده های اسکنر لیزری. Geomat. Inf. دانشگاه ووهان 2007 ، 32 ، 852-855. [ Google Scholar ]
- یانگ، بی. وی، ز. لی، کیو. Li, J. استخراج ردپای نمای ساختمان نیمه خودکار از ابرهای نقطه LIDAR متحرک. IEEE Geosci. سنسور از راه دور Lett. 2013 ، 10 ، 766-770. [ Google Scholar ] [ CrossRef ]
- سینگ، اس. Grewal، SK نقش مورفولوژی ریاضی در پردازش تصویر دیجیتال: بررسی. بین المللی J. Sci. مهندس Res. 2014 ، 2 ، 1-3. [ Google Scholar ]
- وو، اچ. لی، ن. لیو، سی. Shi, B. تقسیمبندی دادههای LIDAR هوابرد بر اساس مورفولوژی ریاضی سه بعدی. J. Remote Sens. 2011 ، 6 ، 1189-1201. [ Google Scholar ]
- هرناندز، جی. Marcotegui, B. تقسیم بندی مورفولوژیکی تصاویر نمای ساختمان. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد پردازش تصویر، قاهره، مصر، 7 تا 10 نوامبر 2009. صفحات 4029–4032.
- رودریگز-کوئنکا، بی. گارسیا کورتس، اس. اوردونز، سی. آلونسو، ام. عملیات مورفولوژیکی برای استخراج محدودیتهای شهری در ابرهای نقطهای سه بعدی MLS. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 93. [ Google Scholar ] [ CrossRef ]
- سرنا، ا. مارکوتگی، بی. هرناندز، جی. تقسیم بندی نماها از ابرهای نقطه سه بعدی شهری با استفاده از اپراتورهای مبتنی بر ویژگی هندسی و مورفولوژیکی. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 6. [ Google Scholar ] [ CrossRef ]
- سرنا، ا. مارکوتگی، ب. تشخیص دسترسی شهری از دادههای اسکن لیزری سیار. ISPRS J. Photogramm. Remote Sens. 2013 ، 84 ، 23-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ک. چن، SC; ویتمن، دی. Shyu, ML یک فیلتر مورفولوژیکی پیشرونده برای حذف اندازهگیریهای غیرزمینی از دادههای LIDAR در هوا. IEEE Trans. Geosci. Remote Sens. 2003 , 41 , 872-882. [ Google Scholar ] [ CrossRef ]
- هوی، ز. هو، ی. Yevenyo، Y.; Yu, X. یک الگوریتم مورفولوژیکی بهبود یافته برای فیلتر کردن ابر نقطه LIDAR موجود در هوا بر اساس درون یابی کریجینگ چند سطحی. Remote Sens. 2016 ، 8 ، 1-16. [ Google Scholar ] [ CrossRef ]
- موکرجی، ک. بانرجی، تی. رویچودری، پی. Yamane، T. زمینی LIDAR بررسی و تجزیه و تحلیل مورفولوژیکی برای شناسایی خواص نفوذ در سنگ آهک تامالا، غرب استرالیا. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2015 , 8 , 4871–4881. [ Google Scholar ]
- کائو، ز. Wu, Y. یک روش جدید فیلتر مورفولوژیکی منطقه سه بعدی چند مقیاسی برای استخراج ساختمان LIDAR در هوا. بین المللی J. Smart Home 2016 ، 10 ، 267–276. [ Google Scholar ]
- شی، WZ; لی، بی. لی، کیو. روشی برای تقسیمبندی تصویر برد گرفتهشده توسط اسکن لیزری خودرو بر اساس چگالی نقاط پیشبینیشده. Acta Geodaetica Cartogr. گناه 2005 ، 34 ، 96-100. [ Google Scholar ]
- گوان، ی. چن، ایکس. شی، جی. روشی قوی برای تطبیق یک هواپیما برای اشاره به ابرها. J. Tongji Univ. (Nat. Sci.) 2008 ، 36 ، 981-984. [ Google Scholar ]
- پاراپ، سی دی; پرماچاندرا، سی. Tamura, M. بهینه سازی عناصر ساختار برای تبدیل مورفولوژیکی ضربه یا از دست دادن برای استخراج ساختمان از تصاویر VHR هوابرد در مناطق خطر طبیعی. بین المللی جی. ماخ. فرا گرفتن. سایبرن. 2015 ، 6 ، 641-650. [ Google Scholar ] [ CrossRef ]
- Wu، XL; یانگ، LL; لیانگ، اف. روش تقسیم بندی Cui، SG دمبرگ بر اساس مورفولوژی عناصر چند ساختاری. Appl. مکانیک. ماتر 2015 ، 734 ، 581-585. [ Google Scholar ] [ CrossRef ]
- مهدی سوزانی، ج. دیگن، جی. آدفری، ن. لارتیگ، سی. مورل، JM استخراج ویژگی از ابرهای نقطه با چگالی بالا: به سمت اتوماسیون یک استراتژی دیجیتالی بدون تماس سه بعدی هوشمند. محاسبه کنید. به دس کمک کرد. Appl. 2010 ، 7 ، 863-874. [ Google Scholar ]
- هاکل، تی. وگنر، دی. شیندلر، ک. تقسیم بندی سریع ابر نقطه سه بعدی با چگالی بسیار متغیر. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. 2016 ، III-3 ، 177-184. [ Google Scholar ]









© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر