

خلاصه
نقشه 2.5 بعدی یک رویکرد مناسب و کارآمد برای بهرهبرداری از یک مدل شهر سه بعدی (3 بعدی) عظیم در وب GIS است. با توسعه سریع فتوگرامتری مورب هوا و بازسازی سه بعدی مبتنی بر عکس، مدل های سه بعدی شهر روز به روز در دسترس تر می شوند. سیستم اطلاعات جغرافیایی سهبعدی (GIS) میتواند از تجسم تعاملی مدلهای سهبعدی شهر در پلتفرمها و دستگاههای مختلف پشتیبانی کند. با این حال، ارزش و دسترسی مدل های شهر سه بعدی موجود را می توان با ادغام آنها در برنامه های GIS دو بعدی (2 بعدی) مبتنی بر وب افزایش داد. در این مقاله، ما یک گردش کار گام به گام برای تولید تصاویر مورب (نقشههای 2.5 بعدی) از مدلهای عظیم شهر سه بعدی ارائه میکنیم. چارچوب پیشنهادی میتواند نقشههای 2.5 بعدی را از دیدگاه دلخواه تولید کند، با زاویه ارتفاع و زاویه آزیموت یک دوربین املایی مجازی تعریف می شود. ما نشان میدهیم که چگونه نقشههای 2.5 بعدی میتوانند به تجسم مبتنی بر وب و بهرهبرداری از مدلهای عظیم شهر سه بعدی کمک کنند. نتیجه می گیریم که یک نقشه 2.5 بعدی یک نمایش داده فشرده است که برای جریان داده های وب مدل های شهر سه بعدی بهینه شده است و آنالیز هندسی ساختمان ها را می توان به طور موثر بر روی نقشه های 2.5 بعدی انجام داد.
کلید واژه ها:
مدل شهر سه بعدی عظیم ; GIS دو بعدی ؛ وب GIS ; نقشه 2.5 بعدی ؛ فتوگرامتری مورب هوابرد
1. معرفی
مناظر شهری در هر دو بعد افقی و عمودی [ 1 ] با حضور توده های آبی، گیاهان، ساختمان ها و سایر سازه های مصنوعی بسیار متنوع هستند. ناکافی بودن تصاویر ماهوارهای و مدلهای رقومی ارتفاع (DEMs) برای نمایش بعد عمودی منجر به استفاده گسترده از مدلهای سه بعدی شهر [ 2 ] در GIS شهری شد که معمولاً به شکل یک محیط جغرافیایی مجازی [ 3 ] است.
اگرچه 3D GIS در حال حاضر به طور گسترده برای اکتشاف تعاملی مدل های شهر سه بعدی استفاده می شود، استفاده از آن در زمینه وب با چالش های فنی زیر مواجه است: (1) محدودیت های انتقال داده های اینترنتی. برای مثال، دانلود 1 گیگابایت داده مدل سه بعدی با سرعت انتقال اینترنت 1 مگابایت بر ثانیه، 17 دقیقه طول می کشد. این بدان معناست که کاربران احتمالاً تاخیر داده را تحت پهنای باند محدود تجربه خواهند کرد. (2) سازگاری سخت افزاری و نرم افزاری بین پلتفرم. دستگاهها و پلتفرمهایی که میزبان برنامههای GIS سه بعدی هستند باید حداقل نیازهای سختافزاری و نرمافزاری را برای پشتیبانی از واحد پردازش گرافیکی (GPU) برآورده کنند. دستگاه های تلفن همراه همیشه الزامات محاسباتی یک GIS سه بعدی را برآورده نمی کنند [ 4]. استقرار یک GIS سه بعدی در پلتفرم های مختلف مانند لینوکس، ویندوز، اندروید، iOS و مک، نیازمند هزینه و تلاش بیشتری برای توسعه است، زیرا API های گرافیکی سه بعدی به ندرت از مهاجرت مستقیم بین پلتفرم پشتیبانی می کنند. علاوه بر این، GIS دو بعدی مبتنی بر وب الگوی غالب در برنامههای تجاری عملیاتی است. بسیاری از برنامههای GIS تجاری، مانند وبسایت رزرو هتل Agoda ( http://www.agoda.com/ )، برای عملکرد عملیاتی، تنها بر GIS دو بعدی مبتنی بر وب متکی هستند. نقشه های 2.5 بعدی که به عنوان نقشه های پرسپکتیو یا نقشه های دید چشم پرنده نیز شناخته می شوند، در یک پرسپکتیو مایل نمایش داده می شوند. نقشه برداری 2.5 بعدی به دوران باستان برمی گردد ( شکل 1). کارتوگرافی 2.5 بعدی مدرن، که در برخی زمینه ها به عنوان هنر پیکسل شناخته می شود، رندرهای عکاسی واقعی یا هنری مبتنی بر طراحی به کمک رایانه (CAD) را در نقشه ها ادغام می کند. نقشه های 2.5 بعدی می توانند تجسم و بهره برداری از مدل های شهر سه بعدی را در برنامه های GIS دو بعدی مبتنی بر وب تسهیل کنند. ارائهدهنده نقشههای 2.5 بعدی، Edushi، نقشههای هنری پیکسلی را از مدلهای CAD تولید میکند و این نقشهها را به یک وب GIS مبتنی بر مرورگر تحویل میدهد ( شکل 2 A)، که میتواند بر روی دستگاهها و پلتفرمهای مختلف اجرا شود. این نقشههای مبتنی بر هنر پیکسلی مبتنی بر CAD همچنین به طور گسترده در GIS نقشه دانشگاه استفاده میشوند ( شکل 2 B) ( http://maps.colostate.edu/ , https://www.udayton.edu/map/ , http:/ /map.wfu.edu/ ، https://www.asu.edu/map/interactive/) که صحنه های سه بعدی با کیفیت بالا را در شرایط پهنای باند و قدرت محاسباتی محدود در دسترس کاربران قرار می دهد. اگر مدلهای شهر سهبعدی در مقیاس بزرگ را بتوان در وب GIS همانطور که در آن مثالها نشان داده شده است استفاده کرد ( شکل 2 A,B)، مخاطبان گستردهتری را جذب کرده و از دامنه وسیعتری از کاربردها بهرهمند خواهند شد. بنابراین، نقشه های 2.5 بعدی پتانسیل افزایش ارزش و گسترش استفاده از مدل های شهر سه بعدی موجود را دارند.
مدل های سه بعدی شهر را می توان از منابع مختلفی استخراج کرد. یکی از سادهترین شکلهای یک مدل شهر سه بعدی با اکسترود کردن ردپای ساختمان در چند وجهی به دست میآید [ 5 ]. یک ابر نقطه LiDAR می تواند به طور دقیق هندسه معماری را ثبت کند، اما اطلاعات بافتی باید به طور جداگانه بازیابی شود [ 6 ]. مدلهای ساختمانی فوتورئالیستی را میتوان در یک محیط CAD ساخت، اما کار شدید مورد نیاز برای ایجاد جزئیات هندسی و گرفتن عکسهای نمای سطح خیابان چالش برانگیز است. اخیراً، با توسعه سریع فناوری وسایل نقلیه هوایی بدون سرنشین (UAV) و بازسازی سه بعدی مبتنی بر بینایی کامپیوتری [ 7 ]، مدلهای شهری سهبعدی مبتنی بر فتوگرامتری هوابرد (OAP3Ds) به طور فزایندهای بالغ و مقرون به صرفه میشوند.8 ]. OAP3D ها مزایای LiDAR و عکاسی از فاصله نزدیک را با هم ترکیب می کنند و بنابراین در جزئیات هندسی و بافتی غنی می شوند.
در مراحل اولیه توسعه GIS سه بعدی، استفاده از مدلهای شهر سه بعدی عمدتاً به تجسم و برنامهریزی شهری محدود میشد [ 9 ، 10 ]، اما اخیراً بسیار فراتر از این محدوده گسترش یافته است. یک بررسی کتابسنجی [ 11 ] 29 مورد استفاده متمایز را از حوزههای کاربردی مختلف شناسایی کرد و این موارد استفاده را به دو دسته بزرگ، یعنی تجسم محور و غیر تجسم محور گروهبندی کرد. از 29 مورد استفاده، 24 مورد تجسم محور و تنها پنج مورد غیر تجسم محور هستند ( جدول 1 ). این نشان میدهد که ارزش اصلی مدلهای سهبعدی شهر عمدتاً در تجسم تجسم مییابد، اگرچه اهداف غیر تجسمی مختلفی نیز وجود دارد.
مدلهای شهر سه بعدی عظیم در ساختار سطح جزئیات (LOD) تعبیه شدهاند که برای رندرهای خارج از هسته وابسته به دید بهینه شده است، و بنابراین نمیتوان به راحتی به محیط CAD برای ساختن نقشههای 2.5 بعدی وارد کرد. فرمتهای معمولی برای نمایش مدلهای سه بعدی شهر عظیم شامل CityGML و OAP3D هستند. علاوه بر این، روش ها و کاربردهای کارتوگرافی 2.5 بعدی به طور سیستماتیک در ادبیات مورد توجه قرار نگرفته است.
در این مطالعه، ما یک چارچوب کارآمد ( شکل 3 ) برای تبدیل مدل های عظیم شهر سه بعدی به نقشه های 2.5 بعدی ارائه می کنیم. در چارچوب پیشنهادی ( شکل 3 )، هدف ما دستیابی به اهداف عملکردی زیر است:
-
پشتیبانی از فرمت های مختلف مدل سه بعدی مدل های سه بعدی در قالب های بسیار متنوعی از جمله .3ds، .obj و .dae عرضه می شوند.
-
پشتیبانی از ساختار LOD و پارتیشن بندی فضایی. با توجه به توان محاسباتی محدود، یک طرح تقسیم بندی فضایی و رندر خارج از هسته با طراحی خوب باید برای تولید نقشه های 2.5 بعدی با وضوح فضایی به اندازه کافی بالا استفاده شود. با استفاده از ساختار LOD، یک مدل شهر سه بعدی بزرگ را می توان به شبکه ای از کاشی های نقشه تبدیل کرد، اما این کاشی های نقشه باید به طور دقیق به زمین ارجاع داده شوند تا بتوان آنها را دوباره به هم دوخت تا یک موزاییک 2.5 بعدی بدون درز را تشکیل دهند.
-
پشتیبانی از پرسپکتیوهای نقشه سفارشی پرسپکتیو مایل با زاویه و زاویه ارتفاع دوربین تعریف می شود. مجموعه ای از نقشه های 2.5 بعدی چند منظره به طور بالقوه می تواند نمای کاملی از یک مدل شهر سه بعدی را فراهم کند.
-
پشتیبانی از orthorectification. وجود زمین و استفاده از پرسپکتیو مایل ممکن است مجموعه ای از نقشه های 2.5 بعدی را در معرض اعوجاج و ناهماهنگی قرار دهد. Orthorectification مجموعه ای از نقشه های 2.5 بعدی چند چشم انداز را به یک سیستم مرجع مشترک باز می گرداند.
برای اصلاح یک مجموعه چند منظری از نقشههای 2.5 بعدی، گردش کار معمولی شناسایی و جمعآوری مجموعهای از نقاط کنترل زمینی (GCP) در هر یک از آنها و سپس اعمال یک تبدیل چند جملهای با استفاده از مجموعهای از GCPها برای تاب برداشتن تصویر در تراز است. با تصویر مرجع مشترک این روش اصلاح سنتی نه تنها کار فشرده است، بلکه باعث ایجاد اختلال در یک جریان کار ساده می شود. علاوه بر این، اجرای کارآمد پارتیشن بندی فضایی و رندر خارج از هسته نیز یک کار بی اهمیت نیست.
2. روش ها
2.1. ساخت یک رندر تصویر مایل یکپارچه
به طور خلاصه، انتظار می رود که رندر تصویر مایل فرمت های مختلف مدل سه بعدی، انواع ساختارهای LOD، پارتیشن بندی فضایی و پیکربندی دوربین سفارشی را در خود جای دهد. برای اینکه بفهمیم کدام API گرافیک سهبعدی برای توسعه ارائهدهنده تصویر مایل مناسبتر است، ما یک بررسی مقایسهای از APIهای رندر اصلی بر اساس دستهها انجام دادیم ( جدول 2 ):
1. API گرافیکی سطح پایین
API های گرافیکی سطح پایین پشتیبانی محدودی از فرمت های داده خارجی ارائه می دهند. به عنوان مثال، DirecX3D فقط از فرمت X. بومی خود پشتیبانی داخلی دارد. علاوه بر این، آنها قابلیت های پیشرفته مربوط به مدیریت داده های خارج از هسته، تبادل داده های تصویری و ساخت نمودار صحنه را ارائه نمی دهند.
2. استودیو 3D CAD سطح بالا
استودیوهای 3D CAD مانند Autodesk 3ds Max و Sketchup برای طراحی معماری، ایجاد مدل و رندر آفلاین تصاویر فوتورئالیستی در نظر گرفته شده اند. Autodesk 3ds Max و Sketchup دارای پشتیبانی داخلی برای طیف گسترده ای از فرمت های مدل سه بعدی هستند و می توان از آنها برای ایجاد و رندر کردن مدل های ساختمان های سه بعدی استفاده کرد. مدلهای عظیم شهر سهبعدی، که به عنوان مدلهای شهر سهبعدی در مقیاس بزرگ نیز شناخته میشوند، معمولاً در قالب سلسله مراتبی از مدلهای ساختمانهای سهبعدی به تدریج سادهسازی شده وجود دارند. این استودیوهای 3D CAD به قابلیت داخلی برای مدیریت یک مدل شهری سه بعدی عظیم با ساختار LOD مجهز نیستند [ 8 ].
3. SDK یکپارچه سطح متوسط
OGRE و OpenSceneGraph کتابخانه های گرافیکی سه بعدی منبع باز هستند که در بالای APIهای گرافیکی سطح پایین توسعه یافته اند. آنها عمدتاً توسط توسعه دهندگان برنامه در زمینه هایی مانند شبیه سازی بصری، بازی های رایانه ای، واقعیت مجازی و تجسم و مدل سازی علمی استفاده می شوند. OpenSceneGraph نه تنها پشتیبانی بومی را برای طیف گسترده ای از فرمت های مدل سه بعدی ارائه می دهد، بلکه یک نمودار صحنه به خوبی سازماندهی شده است که مدل های شهر سه بعدی در مقیاس بزرگ با ساختار LOD را در خود جای می دهد. در واقع، OAP3D معمولاً در قالب LOD مبتنی بر OpenSceneGraph نشان داده می شود [ 8 ]. علاوه بر این، OpenSceneGraph همچنین امکان دسترسی به بسیاری از توابع OpenGL مانند رندر به بافت و تغییر فضای دوربین را فراهم می کند که برای تولید تصویر مایل بسیار مهم هستند.
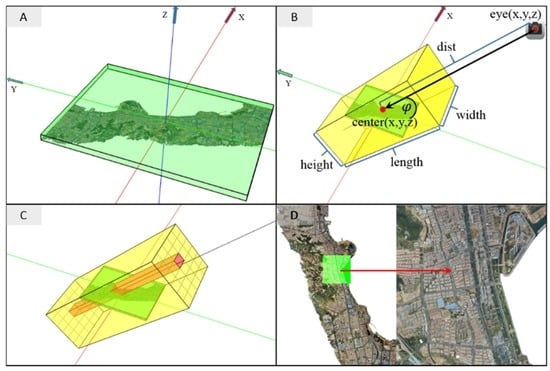
بر اساس مزایا و معایب مورد بحث در بالا، OpenSceneGraph برای توسعه رندر تصویر مایل انتخاب شد، که هدف از تبدیل یک مدل شهر سه بعدی به یک تصویر مایل برای یک چشم انداز معین است. رندر تصویر مایل را می توان به عنوان ماژول رندر یک استودیوی CAD با پشتیبانی گسترده از مدل های عظیم شهر سه بعدی در نظر گرفت. معمولاً دو نوع دوربین در گرافیک کامپیوتری وجود دارد: دوربین پرسپکتیو و دوربین املایی. دوربین پرسپکتیو مانند دوربین دنیای واقعی یا سیستم بینایی انسان عمل می کند. با این حال، تصویری که توسط یک دوربین پرسپکتیو تولید میشود، در معرض اعوجاج پرسپکتیو قرار میگیرد، که میتواند بر دقت هندسی موزاییک کردن کاشی نقشه و تصحیح قاعده در تولید نقشههای 2.5 بعدی تأثیر منفی بگذارد. برای جلوگیری از تحریف دیدگاه، در خط لوله ارائه تصویر اریب پیشنهادی از یک دوربین املایی استفاده می شود. با یک برجستگی املایی، یک شی همیشه به همان اندازه ظاهر می شود، مهم نیست چقدر نزدیک یا دور باشد. دوربین املایی (شکل 4 و شکل 5 ) که برای تولید یک تصویر مایل استفاده می شود، به گونه ای تنظیم شده است که کل حوزه فضایی یک مدل شهر سه بعدی را پوشش می دهد و عمدتاً توسط سه عامل، یعنی زاویه ارتفاع، محدود می شود. φ�، زاویه آزیموت θ�و جعبه مرزی مدل شهر سه بعدی.
کادر محدود ( شکل 5 الف) با { xmin, ymin, zmin, xmax, ymax, zmax } داده میشود و دارای شعاع R است . زاویه آزیموت را به عنوان تعداد درجه در جهت عقربه های ساعت از محور منفی Y تعریف می کنیم. مدل شهر سه بعدی را در جهت عقربه های ساعت حول جهت عمودی (محور Z) به مقداری معادل θ�و سپس کادر محدودکننده فضای جهان را دوباره محاسبه کنید. اگر θ�در صورتی که دوربین در جهت جنوب به شمال باشد، 0 درجه است، چرخش بر جهتگیری مدل و جعبه محدودکننده فضای جهان تأثیر نمیگذارد. با چرخاندن مدل شهر سه بعدی به جای خود دوربین، می توان یک سیستم مرجع دوربین ثابت را حفظ کرد.
دوربین مجازی با تعریف دو تبدیل [ 34 ] ساخته می شود:
Vمن م _ _a t r i x =⎡⎣⎢⎢⎢⎢v R i gساعتتیایکسv R i gساعتتیyv R i gساعتتیz0v Uپایکسv Uپyv Uپz0v Fo r w a rدایکسv Fo r w a rدyv Fo r w a rدz0e yهایکسe yهye yهz1⎤⎦⎥⎥⎥⎥،�منه�مآتی�منایکس=[�آرمن�ساعتتیایکس��پایکس�اف���آ�دایکسه�هایکس�آرمن�ساعتتی���پ��اف���آ�د�ه�ه��آرمن�ساعتتی���پ��اف���آ�د�ه�ه�0001]،
جایی که ViewMatrix سیستم مختصات محلی دوربین را تعریف میکند، چشم ( x,y,z ) موقعیت دوربین است ( شکل 5 B) و vUp (x,y,z) حاصلضرب متقاطع vForward ( x,y,z) است. ) و vRight ( x,y,z ) . محور مثبت X، محور Y و محور Z سیستم مختصات دوربین به ترتیب با vRight ( x,y,z ) ، vUp ( x,y,z ) و vForward ( x,y,z ) تعریف میشوند . چهار بردار درViewMatrix در معادلات (9) – (12) آورده شده است.
پr o j e c t i o n Ma t r i x =⎡⎣⎢⎢⎢⎢⎢⎢⎢2r i gh t − l e fتی00002t o p − b o t t o m0000–2fa r − n e a r0r i gh t + l e fتیr i gh t − l e fتیt o p + b o t t o mt o p − b o t t o m–fa r + n e a rfa r − n e a r1⎤⎦⎥⎥⎥⎥⎥⎥⎥پ���هجتیمن��مآتی�منایکس=[2�من�ساعتتی–له�تی00�من�ساعتتی+له�تی�من�ساعتتی–له�تی02تی�پ–ب�تیتی�متر0تی�پ+ب�تیتی�مترتی�پ–ب�تیتی�متر00–2�آ�–�هآ�–�آ�+�هآ��آ�–�هآ�0001]
ماتریس پیشبینی املایی در معادله (2) با شش پارامتر تعریف میشود که با معادلات (13) – (18) ارائه شدهاند. عرض، ارتفاع، طول و مرکز نما در معادلات (4) – (7) آورده شده است.
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪s h a do w L e n = ( zm a x − zm i n ) ×tanφw i dt h = x m a x − x m i nh e i gh t = ( ym a x − ym i n ) ×گناه φ2+ s h a do w L e nl e n gt ساعت ∈ [ R × 4 ، ∞ ]v Ce n t er( x ، y، z)= {w i dتی ساعت2،( ym a x − yمن ن ) _2+s h a do w L e n2، zمن n } _دi s t ∈ [ l e n gt ساعت ، ∞ ]v R i gساعتتی( x ، y، z)= { 1 , 0 , 0 }v Fo r w a rد( x ، y، z)= { 0 , − cos φ , sin φ }v Uپ( x ، y، z)= v Fo r w a rد( x ، y، z)× v R i gساعتتی( x ، y، z) e yه( x ، y، z)= v Ce n t er( x ، y، z)+ v Fo r w a rد( x ، y، z)× dمن تی _l e ft = − w i dt h / 2r i gh t = w i dt h / 2b o t t o m = − h e i gh t / 2t o p = h e i gh t / 2n e a r = di s t − l e n gt h / 2fa r = di s t + l e n gt h / 2(3)(4)(5)(6)(7)(8)(9)(10)(11)(12)(13)(14)(15)(16)(17)(18){(3)سساعتآد���ه�=(�مترآایکس–�مترمن�)×برنزه�(4)�مندتیساعت=ایکسمترآایکس–ایکسمترمن�(5)ساعتهمن�ساعتتی=(�مترآایکس–�مترمن�)×گناه�2+سساعتآد���ه�(6)له��تیساعت∈[آر×4،∞](7)�سیه�تیه�(ایکس،�،�)={�مندتیساعت2،(�مترآایکس–�مترمن�)2+سساعتآد���ه�2،�مترمن�}(8)دمنستی∈[له��تیساعت،∞](9)�آرمن�ساعتتی(ایکس،�،�)={1،0،0}(10)�اف���آ�د(ایکس،�،�)={0،–cos�،گناه�}(11)��پ(ایکس،�،�)=�اف���آ�د(ایکس،�،�)×�آرمن�ساعتتی(ایکس،�،�) (12)ه�ه(ایکس،�،�)=�سیه�تیه�(ایکس،�،�)+�اف���آ�د(ایکس،�،�)×دمنستی(13)له�تی=–�مندتیساعت/2(14)�من�ساعتتی=�مندتیساعت/2(15)ب�تیتی�متر=–ساعتهمن�ساعتتی/2(16)تی�پ=ساعتهمن�ساعتتی/2(17)�هآ�=دمنستی–له��تیساعت/2(18)�آ�=دمنستی+له��تیساعت/2
در معادلات (3) – (7)، φ�زاویه ارتفاع است و vCenter ( x,y,z ) از مرکز جعبه مرزی به سطح زمین ترجمه شده است و نقطه مرجعی است که دوربین به آن نگاه می کند ( شکل 5 C). سطح زمین را در حداقل ارتفاع، zmin تنظیم می کنیم . در معادله (3)، shadowLen حداکثر طول پیش بینی شده ممکن از یک خط عمودی در صفحه زمین است. ما ارتفاع فروستوم دوربین را با shadowLen گسترش می دهیم و vCenter ( x,y,z ) را به سمت محور مثبت Y توسط shadowLen ترجمه می کنیم./2 به طوری که ساختمان های بلند (در صورت وجود) در لبه شمالی در میدان دید باقی می مانند و صحنه پیش بینی شده در مرکز باقی می ماند. طول فروستوم دید در رابطه (6) می تواند هر مقداری بزرگتر از قطر کره مرزی باشد. در معادله (8)، dist نشان دهنده فاصله vCenter ( x,y,z ) تا دوربین است. می تواند هر مقداری بزرگتر از طول frustum view باشد.
برای غلبه بر محدودیتهای توان محاسباتی، یک صحنه بزرگ باید به صورت فضایی به شبکهای از تعداد مشخصی از ردیفها و ستونها تقسیم شود و هر سلول شبکه به یک کاشی نقشه مرتبط باشد. با دوربین اصلی املایی که در بالا ساخته شده است، فقط باید فروستوم را به آرایه ای از فروستوم های کوچکتر تقسیم کنیم تا هر یک از این زیر فروستوم ها دقیقاً کاشی نقشه مربوطه را بپوشاند ( شکل 5)ج). در تولید یک تصویر مایل از یک مدل شهر سه بعدی برای مجموعهای از پارامترها، گروه زیر فروستومها پیموده میشوند و هر دوربین زیر فروستوم فعال میشود تا صحنه سهبعدی را به یک OpenGL Render Target Texture (RTT) تبدیل کند، که ذخیره میشود. به عنوان یک تصویر کاشی نقشه بلافاصله پس از پایان حلقه رندر. پس از گذر از تمام فروستومهای فرعی، مجموعه کاشیهای نقشه تولید شده در یک شطرنجی بدون درز موزاییک میشوند ( شکل 5 D).
ما استفاده از مجموعه پیشنهادی معادلات (1)-(18) را با پارامترسازی یک رندر تصویر مایل مثال می زنیم ( جدول 3 ). در این مثال، مدل ساختمان مورد استفاده ( شکل 6 الف) دارای یک کادر محدود کننده { xmin = −50، ymin = −50، zmin = −50، xmax = 50، ymax = 50، zmax = 50} است که در مرکز مبدا قرار گرفته است. x = 0، y = 0، z = 0}. دوربین مایل در جهت جنوب به شمال نگاه می کند { x = 0، y = 0.707106781، z = -0.707106781} داده شده θ�= 0 درجه و φ�= 45 درجه ( شکل 6 A,B). مجموعه پارامترهایی که ViewMatrix و ProjectionMatrix را تعریف می کنند در جدول 3 خلاصه شده است .
2.2. خودکارسازی بازیابی مختصات GCP برای Orthorectification
در تصحیح درستی، یک تصویر مایل تاب خورده است به طوری که تمام پیکسل های زمین به فضای املایی مدل شهر سه بعدی نگاشت می شوند. معمولاً در مواردی با زمین ناهموار به تعداد بیشتری از GCP نیاز است. برای اصلاح یک مجموعه چند منظری از نقشه های 2.5 بعدی، مختصات هر GCP باید به طور جداگانه در هر نقشه شناسایی و جمع آوری شود. بازیابی خودکار مختصات GCP می تواند به طور قابل ملاحظه ای کار مورد نیاز برای شناسایی دستی و جمع آوری مختصات GCP را کاهش دهد.
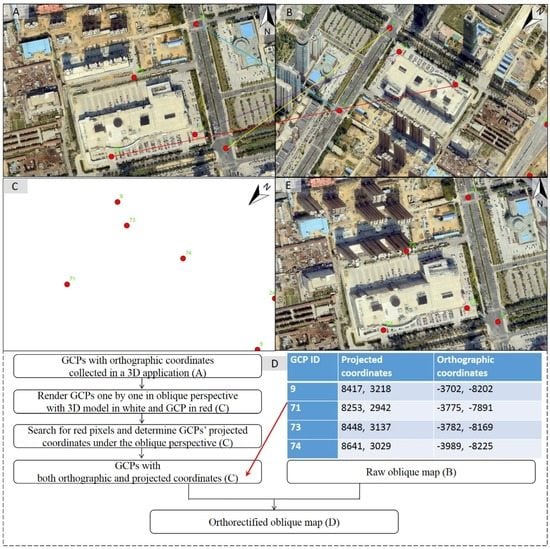
ما یک روش مبتنی بر گرافیک کامپیوتری را برای بازیابی خودکار مختصات GCPها در یک تصویر مورب ارائه میکنیم. قبل از اعمال این روش روی یک تصویر مایل، مجموعه ای از GCPها با مختصات املایی باید از مدل شهر سه بعدی در یک GIS سه بعدی یا از یک تصویر ارتو در یک GIS دو بعدی جمع آوری شود (شکل 7 الف ) . در جمع آوری GCPها، باید اطمینان حاصل شود که هر GCP از زمین در معرض دید ( شکل 7 الف) به جای سایر اشیاء بالای زمین مانند ساختمان ها، درختان و وسایل نقلیه نمونه برداری شده است. یک RTT چهار بایتی به اندازه یک کاشی نقشه در شبکه برای رندر کردن به بافت اختصاص داده شده است. با روش پیشنهادی، مختصات هر GCP در یک تصویر مورب را می توان به صورت زیر به درستی بازیابی کرد ( شکل 7 ):
-
شماره ردیف و ستون کاشی نقشه حاوی GCP را با مختصات املایی این GCP تعیین کنید.
-
یک نقطه اولیه OpenGL با استفاده از مختصات GCP ایجاد کنید و سپس نقطه را همراه با مدل شهر سه بعدی با استفاده از دوربین املایی مرتبط ارائه دهید. در خط لوله سایهزنی GPU، GCP اولیه به رنگ قرمز و مدل شهر سه بعدی به رنگ مشکی خالص با تمام بافتها و مواد غیرفعال شده است ( شکل 7 B). در شکل 6 B، پیکسلهای پسزمینه مرتبط با مدل شهر سهبعدی کنار گذاشته نمیشوند تا نشان دهند که چگونه GCPها در یک نمای مایل در مقابل نمای املایی جابجا شدهاند.
-
پس از تکمیل حلقه رندر، پیکسل ها را در RTT پیمایش کنید. پیکسل های قرمز حفظ می شوند ( شکل 7 C) در حالی که پیکسل های سیاه کنار گذاشته می شوند. مرکز خوشه پیکسل های قرمز مختصات این GCP در فضای مایل فرض می شود.
GCPهای بازیابی شده در یک جدول ( شکل 7 D) برای استفاده در تاب برداشتن تصویر نهایی ( شکل 7 E) ذخیره می شوند. با این GCP ها، یک تبدیل چند جمله ای می تواند برای تاب برداشتن تصویر مورب در تراز با سیستم مرجع املایی اعمال شود. ArcMap معمولاً با یک ابزار تاب برداشتن تصویر ارائه می شود که می تواند از GCPهای ایجاد شده خارجی در تبدیل چند جمله ای استفاده کند. کتابخانه شطرنجی منبع باز GDAL همچنین یک ابزار تاب برداشتن تصویر رایگان ارائه میکند، «ابزار gdalwarp»، که در چارچوب ساده پیشنهادی استفاده میشود، زیرا برنامههای منبع باز میتوانند راحتتر در یک گردش کار خودکار ادغام شوند.
3. کاربرد
دو مجموعه داده OAP3D با استفاده از ترکیبی از فتوگرامتری هوابرد مورب و بازسازی سه بعدی مبتنی بر عکس به دست آمد ( شکل 8 ). نقشه های 2.5 بعدی از دو مدل شهر سه بعدی با استفاده از چارچوب نقشه برداری 2.5 بعدی پیشنهادی تولید می شوند. مقایسه نقشههای 2.5 بعدی و مدل شهر سهبعدی برای نشان دادن پتانسیل نقشههای 2.5 بعدی برای بهبود تجربه کاربر در کاوش مدلهای شهر سهبعدی در یک محیط وب انجام شده است. ما دقت اندازهگیری ارتفاع ساختمان را بر روی نقشههای 2.5 بعدی در برابر مدل شهر سه بعدی ارزیابی میکنیم و سپس چارچوب کلی را برای ادغام نقشههای 2.5 بعدی در وب GIS ارائه میکنیم. دو مثال ساده ارائه شده است تا نشان دهد که چگونه نقشه های 2.5 بعدی را می توان در برنامه های کاربردی دنیای واقعی ادغام کرد.
3.1. ایجاد نقشه های 2.5 بعدی از مدل های سه بعدی شهر
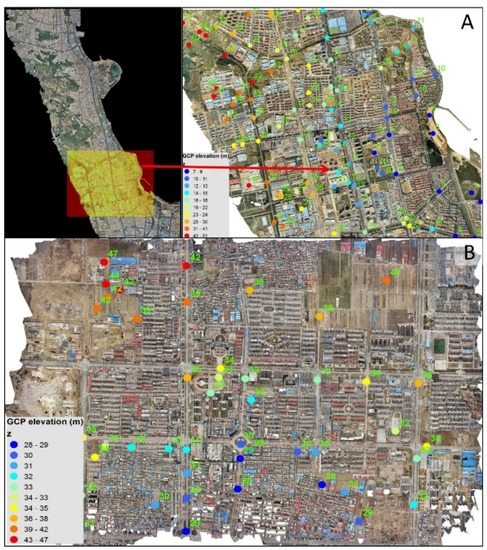
نقشههای 2.5 بعدی با وضوح فضایی 25 سانتیمتر برای هشت منظر، که با ترکیب زاویه ارتفاع 45 درجه و هشت جهت آزیموت، از جمله شمال، جنوب، شرق، غرب، شمال شرق (NE)، جنوب شرق (SE) تعریف شدهاند، تولید شد. ، جنوب غربی (SW) و شمال غربی (NW). مجموعهای از GCPها در یک محیط تعاملی سه بعدی انجام شد که در آن مختصات املایی یک GCP در نقطه تقاطع یک موقعیت کلیک ماوس و صفحه زمین ثبت شد. مجموعه داده 2 ( شکل 8 B) ناحیه ای از توپوگرافی مسطح را پوشش می دهد. در مقابل، مجموعه داده 1 در زمین های ناهموار واقع شده است ( شکل 8آ). در جمعآوری GCP، مناطق اطراف ساختمانها در نظر گرفته نشدهاند، زیرا ممکن است هنگام مشاهده از یک منظر مایل، توسط ساختمانها مسدود شوند. در نتیجه، اکثر GCP ها در بخش های جاده شریانی قرار گرفتند که از موانع ساختمانی پاک بودند.
در تصحیح یک تصویر مورب، مختصات فضای مایل هر GCP با استفاده از تکنیک بازیابی خودکار مختصات GCP بازیابی شد. تصحیح درستی با تبدیل مرتبه سوم برای تاب برداشتن تصاویر مایل به سیستم مرجع املایی استفاده شد. برای نشان دادن عملکرد الگوریتم بازیابی مختصات GCP خودکار، همه GCPها بدون تنظیم یا غربالگری در فرآیند تصحیح قاعده استفاده شدند.
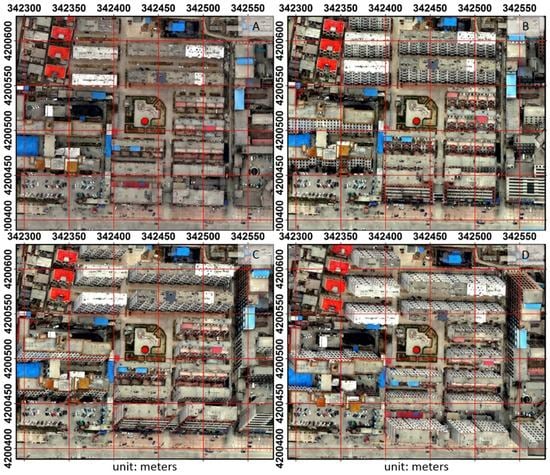
همانطور که انتظار می رفت، نقشه های 2.5 بعدی ایجاد شده از مجموعه داده 1 ( شکل 8 الف) دارای میانگین RMSD 4.5 متر است که به طور قابل توجهی بزرگتر از RMSD (0.8 متر) با مجموعه داده 2 ( شکل 8 B) است. این تفاوت بزرگ در دقت هندسی نقشههای 2.5 بعدی اصلاحشده احتمالاً ناشی از تسکین زمین است. ما یک بازرسی بصری برای ارزیابی کیفیت نقشههای 2.5 بعدی انجام دادیم. یک شبکه تقسیم شده به طور مساوی بر روی نقشه املایی و نقشه های 2.5 بعدی از دیدگاه های مختلف برای مقایسه مکان های مرجع کشیده شد. ما از مکانهای برخی از ویژگیهای بصری برجسته سطح زمین برای ارزیابی جابجایی نسبی بین یک نقشه املایی و یک نقشه مایل استفاده کردیم. در مقیاس نقشه داده شده، جابجایی قابل توجه ( شکل 9) را می توان در نواحی برجسته ناهموار مشاهده کرد ( شکل 8 الف)، اما جابجایی کمی ( شکل 10 ) در مناطق برجسته ملایم ظاهر می شود ( شکل 8 ب).
3.2. مقایسه نمایش های 2.5 بعدی و سه بعدی در تجسم مبتنی بر وب مدل های سه بعدی شهر
اگر حجم زیادی از داده ها درگیر باشد در حالی که پهنای باند اینترنت محدودی در دسترس باشد، انتقال داده می تواند به یک گلوگاه چالش برانگیز برای وب GIS تبدیل شود. یک نمایش داده فشرده برای یک وب GIS که بر تجسم و تجزیه و تحلیل تعاملی تمرکز دارد، کمک می کند. مجموعه داده های 1 و 2 در شکل اصلی خود به ترتیب 81.5 گیگابایت و 4.8 گیگابایت فضای دیسک را اشغال می کنند. در مقابل، مجموعههای هشت منظری از نقشههای 2.5 بعدی در قالب GeoTiff با فشردهسازی LZW به 1.6 گیگابایت و 0.14 گیگابایت کاهش یافتند که به ترتیب نسبت فشردهسازی 51:1 و 34:1 را نشان میدهند.
برای یافتن اینکه چگونه نقشه های 2.5 بعدی می توانند تجربه کاربر را در تجسم مبتنی بر وب مدل های شهر سه بعدی بهبود بخشند، Dataset 2 و نقشه های 2.5 بعدی مرتبط در یک شبکه محلی با حداکثر سرعت انتقال 10 مگابایت بر ثانیه ایجاد شدند. این مجموعه داده یک منطقه 3195 متر در 2292 متر را پوشش می دهد که به شبکه ای 50 متر در 50 متر زیر منطقه با 45 ردیف و 63 ستون تقسیم شده است. در سمت سرویس گیرنده، برای شبیه سازی تعاملی کاربر در حال کاوش در یک مدل شهر سه بعدی با جزئیات کامل، یک کاربر روبات برنامه ریزی شد تا در 2835 زیر منطقه یک به یک زوم کند و تا زمانی که دانلود داده ها تکمیل شود، روی یک منطقه فرعی متمرکز می ماند. و منطقه با جزئیات کامل ظاهر شد. یک منطقه فرعی 50 متر در 50 متر استفاده شد زیرا مدل شهر سه بعدی دارای وضوح فضایی بالاتر از 25 سانتی متر است و می تواند محتوای آن را با جزئیات کامل فقط در صورت بزرگنمایی در یک منطقه تقریباً 50 متر در 50 متر یا کمتر نشان دهد. برنامه کاربر ربات برای پیمایش در 2835 زیر منطقه به طور جداگانه برای تجسم 3 بعدی و 2.5 بعدی ساخته شده است. تحت حالت تجسم سه بعدی، در مجموع 2253 ثانیه برای کاوش در 2835 منطقه فرعی با بازیابی داده و رندر سه بعدی به ترتیب 1648 و 605 ثانیه صرف شد. در حالت تجسم 2.5 بعدی با پرسپکتیو مایل ثابت، به طور متوسط در مجموع 20 ثانیه صرف شد که 5 ثانیه به بازیابی داده ها و 15 ثانیه به رندر تصویر نسبت داده شد. این نشان می دهد که 2.
3.3. اندازه گیری هندسی بر روی نقشه های 2.5 بعدی و ارزیابی دقت
در GIS دوبعدی می توان از نقشه 2.5 بعدی برای اندازه گیری ویژگی های هندسی ساختمان ها استفاده کرد. در تئوری، طول واقعی یک ویژگی خطی که عمود بر سطح زمین است را می توان با تقسیم طول پیش بینی شده بر مماس زاویه ارتفاع دوربین پیدا کرد. هنگامی که زاویه ارتفاع دوربین 45 درجه باشد، طول پیش بینی شده برابر با طول واقعی در نظر گرفته می شود. بنابراین، اندازه گیری مستقیم را می توان بر روی یک نقشه 2.5 بعدی با زاویه ارتفاع 45 درجه انجام داد. برای یک نقشه 2.5 بعدی با زاویه ارتفاع بزرگتر یا کوچکتر، اندازه گیری هنوز با محاسبات مثلثاتی ساده قابل استفاده است. برای ارزیابی دقت اندازهگیری ویژگیهای هندسی روی نقشههای 2.5 بعدی، 20 ساختمان مرجع را از مجموعه داده 2 انتخاب کردیم. ارتفاع هر یک از 20 ساختمان را در یک GIS سه بعدی واقعی و سپس روی نقشههای 2.5 بعدی برای مقایسه اندازهگیری کردیم.شکل 11 ). همانطور که در جدول 4 نشان داده شده است، دو مجموعه از ارتفاعات ساختمان با یک ریشه میانگین مربع انحراف (RMSD) 0.701 متر به خوبی با یکدیگر همخوانی دارند. علاوه بر اندازه گیری ارتفاع، سطح نمای ساختمان را نیز می توان تقریبی کرد ( شکل 12 ).
3.4. گردش کار برای ادغام نقشه های 2.5 بعدی در وب GIS
مجموعه لایه های 2.5 بعدی چند چشم انداز اساساً یک مجموعه داده شطرنجی است که می تواند از طریق خدمات استاندارد نقشه مانند WMS و TMS منتشر شود ( شکل 13).). اکثر سرورهای نقشه منبع باز، از جمله Geoserver، Mapserver و QGIS Server، از سرویس WMS پشتیبانی میکنند و مجموعه دادههای شطرنجی را که در قالب استاندارد شطرنجی جغرافیایی ارائه میشوند، مانند GeoTIFF، در خود جای میدهند. این بدان معنی است که یک نقشه 2.5 بعدی جغرافیایی در قالب استاندارد می تواند به عنوان یک لایه WMS بر روی این سرورها میزبانی شود و بنابراین نقشه های 2.5 بعدی چند دیدگاهی را می توان به عنوان مجموعه ای از لایه های WMS منتشر کرد. گزینه دیگر انتشار نقشه های 2.5 بعدی از طریق سرویس TMS است که نقشه ها را به صورت هرمی از کاشی ها در سطوح زوم متعدد تولید می کند. ابزارهای منبع باز، مانند GDAL2Tiles، می توانند کاشی های TMS را از یک نقشه 2.5 بعدی جغرافیایی تولید کنند. مشاهده نقشههای 2.5 بعدی در مرورگرها در دستگاهها و پلتفرمهای مختلف با در دسترس بودن کتابخانههای نقشهبرداری منبع باز مانند OpenLayers، که میتوانند کاشیهای نقشه، دادههای برداری و نشانگرهای بارگذاری شده از منابع بسیار متنوعی را نمایش دهند، به یک کار آسان تبدیل شده است.
3.5. ادغام تصاویر 2.5 بعدی Orthorectified در نقشه خیابان برای ناوبری پردیس
به طور سنتی، نقشههای پردیس 2.5 بعدی معمولاً از مدلهای سهبعدی شهر ایجاد شده در یک محیط CAD ارائه میشوند. نقشههای 2.5 بعدی چندبعدی تولید شده با استفاده از روش پیشنهادی میتواند به عنوان یک منبع داده جایگزین برای نقشهبرداری 2.5 بعدی پردیس مبتنی بر وب باشد ( شکل 14 ). برخلاف مدلهای CAD که به صورت دستی ایجاد میشوند، OAP3D را میتوان به راحتی در دامنه جغرافیایی بسیار بزرگتر از محوطه دانشگاه بهروزرسانی کرد و بهسرعت بهروزرسانی کرد. بنابراین، نقشه های 2.5 بعدی مبتنی بر OAP3D نه تنها هزینه نقشه برداری 2.5 بعدی پردیس را کاهش نمی دهند، بلکه استفاده از نقشه برداری 2.5 بعدی پردیس را به دامنه وسیع تری از محیط های جغرافیایی، از جمله پارک های صنعتی، دبیرستان ها، بیمارستان ها و شهربازی ها گسترش می دهند.
3.6. تلفیقی از داده های علمی و هنر در کارتوگرافی 2.5 بعدی
نقشه کشی رشته ای است که علم، فناوری و هنر را برای تهیه و مطالعه انواع نقشه ها و نمودارها ترکیب می کند [ 35 ]. نقشه کشی مدرن به مدل های داده های تخصصی در GIS برای ذخیره، مدیریت، نمادسازی و ارائه اطلاعات جغرافیایی دیجیتالی متکی است [ 36 ، 37 ]. از آنجایی که اولین GIS عملیاتی در سال 1960 معرفی شد، کارتوگرافی به تدریج در GIS به عنوان یک مؤلفه ضروری که قابلیت های نقشه برداری اطلاعات نقشه برداری را فراهم می کند، ادغام شد [ 38 ]. گودچایلد [ 39 ] اظهار داشت که «کارتوگرافی با اطلاعات جغرافیایی نیز سر و کار دارد، اما به شیوهای که امر علمی را با امر هنری ترکیب میکند». کرایگر [ 35] ادعا کرد که «هنر» و «علم» از نظر عملکردی نقشی مشابه در نقشهبرداری دارند.
نقشه برداری مبتنی بر هنر پیکسل ( شکل 2 ) مسلماً بیشتر هنری است تا علمی، زیرا محتوای داده از نظر فیزیکی با دنیای واقعی مرتبط نیست. برخلاف نقشه برداری مبتنی بر هنر پیکسلی ( شکل 2 )، یک نقشه 2.5 بعدی از یک OAP3D یک نمایش فتوگرامتری از یک محیط شهری است و به طور منطقی بیشتر علمی است تا هنری. با پیروی از فلسفه نقشهکشی «ادغام هنر و علم»، میتوانیم کیفیت زیباییشناختی را بهبود بخشیده و استفاده از نقشههای 2.5 بعدی مبتنی بر OAP3D را با (1) استفاده از تکنیکهای گرافیک رایانهای برای تولید جلوههای بصری مورد نظر گسترش دهیم [40 ، 41 ] . حتی افکت های سایه ساده می توانند کیفیت زیبایی شناسی نقشه های 2.5 بعدی را افزایش دهند ( شکل 15)) و (2) ترکیب محتوای تولید شده خارجی، به عنوان مثال، طراحی معماری و شهری [ 8 ]، برای دستیابی به دامنه وسیع تری از کاربرد.
4. نتیجه گیری
نقشه برداری 2.5 بعدی یک رویکرد راحت و کارآمد برای ارائه مدل های عظیم شهر سه بعدی به GIS وب دو بعدی است. با کارتوگرافی 2.5 بعدی، مدل های عظیم شهر سه بعدی موجود می توانند توسط مخاطبان گسترده تر و در زمینه های متنوع تری استفاده شوند. یک چارچوب نقشهبرداری 2.5 بعدی سیستماتیک در این مطالعه ارائه شد. ما نشان دادهایم که چگونه چالشهای فنی، از جمله پارتیشن بندی فضایی، ساخت دوربین، و تصحیح راستا، با استفاده از ترکیبی از GIS و تکنیکهای گرافیک کامپیوتری به طور موثر قابل حل هستند. ما یک گردش کار ساده برای تولید نقشه های 2.5 بعدی با کیفیت بالا با استفاده از مدل های عظیم شهر سه بعدی ارائه کرده ایم. دقت هندسی ارتورتفیکاسیون تحت شرایط توپوگرافی مختلف ارزیابی شده است. در تسکین زمین ملایم، ما به RMSD 0.8 متر دست یافتیم، که نشان می دهد که روش بازیابی مختصات GCP خودکار ارائه شده در تصحیح نقشه های 2.5 بعدی چند منظر مؤثر است. اگرچه میانگین RMSD 4.5 متر در توپوگرافی ناهموار یافت شد، اما در صورت استفاده از GCPهای بیشتر، می توان کیفیت تصحیح را بهبود بخشید.
استفاده موثر از مدل های شهر سه بعدی در GIS وب دو بعدی عمدتاً در دو جنبه کاربردی منعکس می شود:
-
تحلیل تعاملی اندازه گیری هندسی نوعی تحلیل تعاملی در مدل های سه بعدی شهر است. ما با مثال نشان دادیم که اندازه گیری هندسی ساختمان ها را می توان به طور موثر بر روی نقشه های 2.5 بعدی انجام داد. ارزیابی دقت نشان داد که اندازهگیری ارتفاع ساختمان بر روی نقشههای 2.5 بعدی در معرض خطاهای جزئی است. اگرچه RMSD به اندازه 0.701 متر کوچک است، اما باید در فعالیت های مهندسی مانند بررسی کاداستر در نظر گرفته شود. عدم قطعیت در اندازه گیری هندسی در نقشه های 2.5 بعدی ممکن است به موقعیت نادرست یک نقطه، تراز نادرست خطوط، یا وضوح ناکافی نقشه مربوط باشد.
-
تجسم تعاملی نتیجه می گیریم که نقشه های 2.5 بعدی یک نمایش داده جمع و جور است که برای پخش و نقشه برداری داده های وب بهینه شده است. مطالعه موردی ما نشان داد که نسبت فشرده سازی 51:1 با تبدیل OAP3D 81.5 گیگابایتی به یک مجموعه هشت منظر از نقشه های 2.5 بعدی 1.6 گیگابایتی قابل دستیابی است. پخش کارآمد نقشه های 2.5 بعدی با وضوح بالا به مشتری می تواند تجربه تجسم با کیفیت بالا را تضمین کند.
منابع
- بروس، م. Fleer, H. شبیه سازی تعاملات سطح-گیاه-هوا در محیط های شهری با مدل عددی سه بعدی. محیط زیست مدل. نرم افزار 1998 ، 13 ، 373-384. [ Google Scholar ] [ CrossRef ]
- هوانگ، بی. جیانگ، بی. لی، اچ. ادغام GIS، واقعیت مجازی و اینترنت برای تجسم، تجزیه و تحلیل و اکتشاف داده های مکانی. بین المللی جی. جئوگر. Inf. علمی 2001 ، 15 ، 439-456. [ Google Scholar ] [ CrossRef ]
- لین، اچ. چن، ام. لو، جی. محیط جغرافیایی مجازی: فضای کاری برای آزمایشهای جغرافیایی به کمک رایانه. ان دانشیار صبح. Geogr. 2013 ، 103 ، 465-482. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. گونگ، جی. آره.؛ دوان، کیو. Zou, Y. یک مدل انگلی مبتنی بر جریان برای پیاده سازی زمین دیجیتال موبایل. بین المللی جی. دیگ. زمین 2014 ، 7 ، 38-52. [ Google Scholar ] [ CrossRef ]
- لدوکس، اچ. Meijers، M. مدل های شهر سه بعدی از نظر توپولوژیکی سازگار به دست آمده توسط اکستروژن. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 557-574. [ Google Scholar ] [ CrossRef ]
- چنگ، ال. گونگ، جی. لی، ام. Liu, Y. بازسازی مدل ساختمان سه بعدی از تصاویر هوایی چند نمای و داده های لیدار. فتوگرام مهندس Remote Sens. 2011 ، 77 ، 125-139. [ Google Scholar ] [ CrossRef ]
- رموندینو، اف. بارازتی، ال. نکس، اف. اسکایونی، م. Sarazzi، D. فتوگرامتری پهپاد برای نقشه برداری و مدل سازی سه بعدی – وضعیت فعلی و چشم اندازهای آینده. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2011 ، 38 ، 22-37. [ Google Scholar ] [ CrossRef ]
- لیانگ، جی. شن، اس. گونگ، جی. لیو، جی. جانگ، جی. جاسازی محتوای تولید شده توسط کاربر در مدل شهر سه بعدی مبتنی بر فتوگرامتری هوابرد. بین المللی جی. جئوگر. Inf. علمی 2016 . [ Google Scholar ] [ CrossRef ]
- رنزینگر، ام. Gleixner, G. مجموعه داده های GIS برای برنامه ریزی شهری سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 1997 ، 21 ، 159-173. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. زو، س. وانگ، جی. مدل های شهر سه بعدی مبتنی بر تحلیل فضایی به طراحی شهری. Geogr. Inf. علمی 2004 ، 10 ، 82-86. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های شهر سه بعدی: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2842-2889. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. Heuvelink، GB; لدوکس، اچ. Stoter, J. انتشار خطای موقعیت در 3D GIS: برآورد تابش خورشیدی سقف های ساختمان. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 2269-2294. [ Google Scholar ] [ CrossRef ]
- لیانگ، جی. گونگ، جی. لی، دبلیو. ابراهیم، AN یک روش سه بعدی تجسم گرا برای محاسبه کارآمد تابش خورشیدی شهری بر اساس نقشه برداری سطح 3D-2D. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 780-798. [ Google Scholar ] [ CrossRef ]
- لیانگ، جی. گونگ، جی. ژو، جی. ابراهیم، ع. لی، ام. یک مدل تابش خورشیدی 3 بعدی منبع باز که با یک سیستم اطلاعات جغرافیایی سه بعدی ادغام شده است. محیط زیست مدل. نرم افزار 2015 ، 64 ، 94-101. [ Google Scholar ] [ CrossRef ]
- لوکاچ، ن. Žalik، B. برآورد پتانسیل خورشیدی سقف های مبتنی بر GPU با استفاده از داده های LiDAR. محاسبه کنید. Geosci. 2013 ، 52 ، 34-41. [ Google Scholar ] [ CrossRef ]
- کاریون، دی. لورنز، ا. Kolbe، TH برآورد وضعیت توانبخشی پر انرژی ساختمان ها برای شهر برلین با استفاده از یک مدل شهر سه بعدی ارائه شده در CityGML. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2010 ، 38 ، 31-35. [ Google Scholar ]
- ساران، س. وات، پی. سریواستاو، SK; کریشنا مورتی، YVN CityGML در سطح معنایی برای استراتژیهای حفاظت از انرژی شهری. ان GIS. 2015 ، 21 ، 27-41. [ Google Scholar ] [ CrossRef ]
- بوترز، آر. آرویو اوهوری، ک. بیلجکی، اف. Zlatanova، S. بهبود خودکار مدلهای CityGML LOD2 با هندسه داخلی مربوطه. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 2248-2268. [ Google Scholar ] [ CrossRef ]
- شیروی، س. ژونگ، ام. بیکایی، س. هانت، جی دی. آبراهام، JE ارزیابی کاربرد داده های LiDAR در استخراج فضای طبقه پایه سال و مقایسه با رویکرد مبتنی بر سرشماری. محیط زیست طرح. B طرح. دس 2015 ، 42 ، 708-729. [ Google Scholar ]
- هن، ا. رومر، سی. گروگر، جی. Plümer, L. طبقه بندی اتوماتیک انواع ساختمان در مدل های سه بعدی شهر. GeoInformatica 2012 ، 16 ، 281-306. [ Google Scholar ] [ CrossRef ]
- رویان، ج. جویا، پی. کاوانیا، آر. بوویل، سی. تجسم مبتنی بر شبکه از مناظر سه بعدی و مدل های شهر. محاسبات IEEE. نمودار. Appl. 2007 ، 27 ، 70-79. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یانگ، PPJ; پوترا، سی. Li, W. Viewsphere: تحلیل دید سه بعدی مبتنی بر GIS برای ارزیابی طراحی شهری. محیط زیست طرح. B طرح. دس 2007 ، 34 ، 971-992. [ Google Scholar ] [ CrossRef ]
- هوفیرکا، جی. Zlocha, M. مدل جدید تابش خورشیدی سه بعدی برای مدل های شهر سه بعدی. ترانس. GIS. 2012 ، 16 ، 681-690. [ Google Scholar ] [ CrossRef ]
- گوا، آر. لی، ال. یینگ، اس. لو، پی. او، بی. جیانگ، آر. توسعه کاداستر سه بعدی برای مدیریت کاربری زمین شهری: مطالعه موردی شنژن، چین. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 40 ، 46-55. [ Google Scholar ] [ CrossRef ]
- دوان، کیو. گونگ، جی. لی، دبلیو. شن، اس. Li, R. بهبود مدل Cubemap برای ناوبری سه بعدی در واقعیت جغرافیایی مجازی. بین المللی جی. دیگ. زمین. 2015 ، 8 ، 877-900. [ Google Scholar ] [ CrossRef ]
- وو، اچ. او، ز. گونگ، جی. تجسم سه بعدی و چارچوب تعاملی مبتنی بر کره مجازی برای مشارکت عمومی در فرآیندهای برنامه ریزی شهری. محاسبه کنید. محیط زیست سیستم شهری 2010 ، 34 ، 291-298. [ Google Scholar ] [ CrossRef ]
- حجازی، آی.ح. اهلرز، ام. زلاتانوا، S. NIBU: رویکردی جدید برای نمایش و تحلیل شبکه های ابزار داخلی در سیستم های اطلاعات جغرافیایی سه بعدی. بین المللی جی. دیگ. زمین. 2012 ، 5 ، 22-42. [ Google Scholar ] [ CrossRef ]
- کوان، نماینده مجلس؛ لی، جی. پاسخ اضطراری پس از 11 سپتامبر: پتانسیل GIS سه بعدی بلادرنگ برای واکنش سریع اضطراری در محیطهای ریز فضایی. محاسبه کنید. محیط زیست سیستم شهری 2005 ، 29 ، 93-113. [ Google Scholar ] [ CrossRef ]
- لو، ز. من، جی. Quackenbush، L. یک رویکرد حجمی برای تخمین جمعیت با استفاده از سنجش از دور LiDAR. فتوگرام مهندس Remote Sens. 2011 ، 77 ، 1145-1156. [ Google Scholar ] [ CrossRef ]
- هیلدبرانت، دی. تیمم، آر. تکنیک ناوبری سه بعدی کمکی و محدود برای مدل های شهر مجازی سه بعدی چند مقیاسی. GeoInformatica 2014 ، 18 ، 537-567. [ Google Scholar ] [ CrossRef ]
- امیرابراهیمی، س. رجبی فرد، ع. مندیس، پ. Ngo، T. چارچوبی برای ارزیابی آسیب سیل در مقیاس میکرو و تجسم برای یک ساختمان با استفاده از ادغام BIM-GIS. بین المللی جی. دیگ. زمین. 2016 ، 9 ، 363-386. [ Google Scholar ] [ CrossRef ]
- لیو، جی. گونگ، جی اچ. لیانگ، جی.ام. لی، ی. کانگ، ال سی؛ آهنگ، LL; Shi، SX یک روش کمی برای ارزیابی آسیبپذیری موج طوفان – مطالعه موردی شهر ویهای. بین المللی جی. دیگ. زمین 2016 . [ Google Scholar ] [ CrossRef ]
- Qin, R. تشخیص تغییر در مدلهای ساختمان LOD 2 با تصاویر استریو با وضوح بسیار بالا. ISPRS J. Photogramm. Remote Sens. 2014 ، 96 ، 179-192. [ Google Scholar ] [ CrossRef ]
- شرلی، پی. آشیخمین، م. مارشنر، اس. مبانی گرافیک کامپیوتری . CRC Press: Boca Raton، FL، USA، 2009. [ Google Scholar ]
- کرایگر، جی بی کارتوگرافی به عنوان هنر و علم؟ کارتوگر. J. 1995 , 32 , 3-10. [ Google Scholar ] [ CrossRef ]
- Peuquet, DJ بررسی تکنیکهایی برای قالببندی مجدد دادههای کارتوگرافی دیجیتال/بخش 1: فرآیند شطرنجی به برداری. کارتوگر. بین المللی جی. جئوگر. Inf. جئوویس. 1981 ، 18 ، 34-48. [ Google Scholar ]
- Peuquet, DJ بررسی تکنیکهایی برای قالببندی مجدد دادههای کارتوگرافی دیجیتال/بخش 2: فرآیند بردار به رستر. کارتوگر. بین المللی جی. جئوگر. Inf. جئوویس. 1981 ، 18 ، 21-33. [ Google Scholar ]
- بری، JK عملیات اساسی در تجزیه و تحلیل نقشه به کمک کامپیوتر. بین المللی جی. جئوگر. Inf. سیستم 1987 ، 1 ، 119-136. [ Google Scholar ] [ CrossRef ]
- Goodchild، M. بیست سال پیشرفت: GIScience در سال 2010. J. Spat. Inf. علمی 2015 ، 1 ، 3-20. [ Google Scholar ] [ CrossRef ]
- لیانگ، جی. گونگ، جی. Li، Y. ارائه واقعی برای شبیه سازی آب کم عمق مبتنی بر فیزیکی در محیط های جغرافیایی مجازی (VGEs). ان GIS 2015 ، 21 ، 301-312. [ Google Scholar ] [ CrossRef ]
- لیو، پی. گونگ، جی. Yu, M. پردازش گرافیکی واحد پردازش حجم پویا برای تایفون ها در یک کره مجازی. بین المللی جی. دیگ. زمین. 2015 ، 8 ، 431-450. [ Google Scholar ] [ CrossRef ]
شکل 1. نقشه چشم انداز دستی توسط Claes Janszoon Visscher ( http://en.wikipedia.org/wiki/Pictorial_maps ).

شکل 2. کاربرد نقشه های 2.5 بعدی در ( A ) یک GIS شهری مبتنی بر وب ( http://sz.edushi.com/ ). ( ب ) یک GIS پردیس آنلاین ( http://maps.colostate.edu/ ) برای پخش کارآمد مدل های سه بعدی شهر.
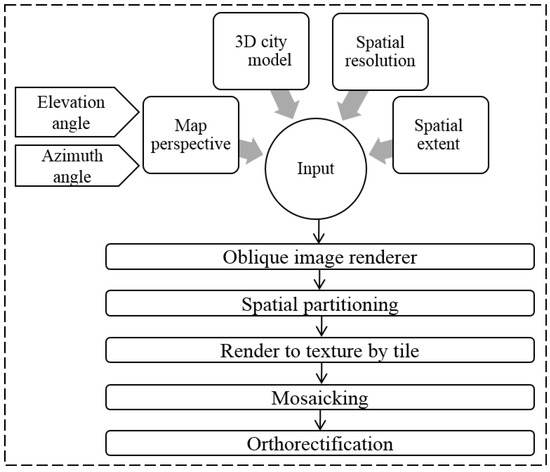
شکل 3. چارچوبی برای تولید نقشه های 2.5 بعدی تصحیح شده از مدل های عظیم شهر سه بعدی.
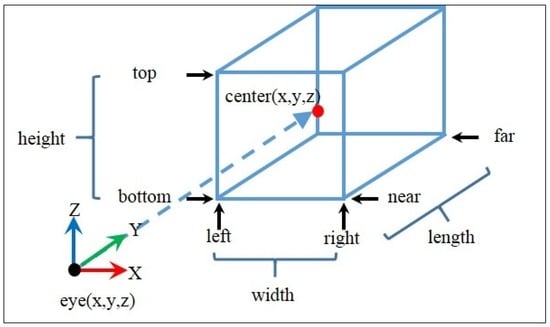
شکل 4. دگرگونی های نمای و طرح یک دوربین املایی.
شکل 5. ساخت یک دوربین مایل ( θ�= 0 درجه، φ�= 45 درجه) برای ارائه نقشه های 2.5 بعدی: ( الف ) جعبه مرزی مدل های شهر سه بعدی. ( ب ) پیکربندی دوربین؛ ( ج ) پارتیشن بندی فضایی. و ( D ) یک کاشی نقشه ارائه شده از یک دوربین فرعی.

شکل 6. ایجاد یک تصویر مورب از جهت جنوب به شمال در زاویه ارتفاع 45 درجه با استفاده از یک رندر تصویر مایل نمونه: ( الف ) مدل ساختمان سه بعدی استفاده شده. ( ب ) تصویر مایل ایجاد شده.
شکل 7. تصویر روش بازیابی خودکار مختصات GCP: ( الف ) GCPها در نمای املایی. ( ب ) GCPها در نمای مایل. ( ج ) GCPهای ارائه شده در نمای مایل بدون پسزمینه برای شناسایی مختصات. ( د ) جدول GCP به دست آمده برای استفاده در orthorectification. ( E ) تصویر مایل با استفاده از مجموعه GCP ها تصحیح شده است.
شکل 8. توزیع GCP ها در دو مجموعه داده OAP3D که برای تولید نقشه های 2.5 بعدی و ارزیابی کیفیت استفاده می شود: ( الف ) مجموعه داده 1 در یک زمین ناهموار. ( ب ) مجموعه داده 2 در یک زمین ملایم.

شکل 9. نقشه های 2.5 بعدی از پرسپکتیوهای مختلف که از مجموعه داده 1 برای ارزیابی دقت هندسی ایجاد شده است (برای مشاهده جابجایی ها از فلش های زرد رنگ پیروی کنید): ( A ) نمای املایی. ( ب ) θ�= 0 درجه، φ�= 45 درجه؛ ( ج ) θ�= 45 درجه، φ�= 45 درجه؛ ( D ) θ�= 135 درجه، φ�= 45 درجه
شکل 10. نقشه های 2.5 بعدی از پرسپکتیوهای مختلف ایجاد شده از مجموعه داده 2 برای ارزیابی دقت هندسی: ( الف ) نمای املایی. ( ب ) θ�= 0 درجه، φ�= 45 درجه؛ ( ج ) θ�= 45 درجه، φ�= 45 درجه؛ ( D ) θ�= 135 درجه، φ�= 45 درجه

شکل 11. اندازه گیری ارتفاع ساختمان ( A ) در یک محیط سه بعدی واقعی. ( B ) روی نقشه 2.5 بعدی با θ�= 315 درجه، φ�= 45 درجه؛ ( C ) روی نقشه 2.5 بعدی با θ�= 0 درجه، φ�= 45 درجه
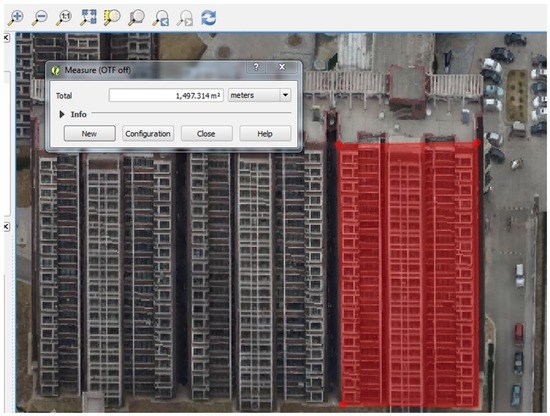
شکل 12. اندازه گیری سطح نمای ساختمان بر روی نقشه 2.5 بعدی در یک GIS دو بعدی.
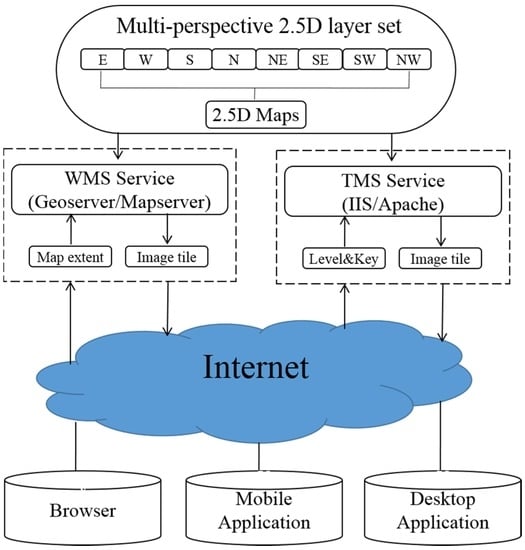
شکل 13. یکپارچه سازی نقشه های 2.5 بعدی در وب GIS از طریق خدمات نقشه.
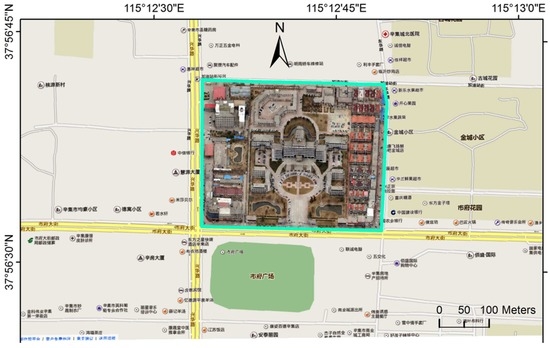
شکل 14. ادغام تصاویر 2.5 بعدی در نقشه خیابان برای ناوبری دانشگاه.
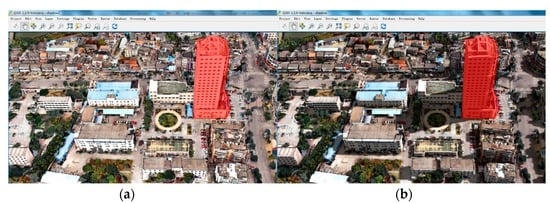
شکل 15. ترکیب جلوه مجازی کامپیوتری در نقشه 2.5 بعدی ( a ) بدون اثر سایه. ( ب ) با اثر سایه.

جدول 1. مروری بر موارد استفاده از مدل های سه بعدی شهر (اقتباس از Biljecki و همکاران [ 11 ]).
جدول 2. بررسی مقایسه ای API های اصلی رندر سه بعدی.
جدول 3. پارامترسازی نمای و ماتریس طرح ریزی یک رندر مایل تصویر.
جدول 4. مقایسه ارتفاع ساختمان اندازه گیری شده بر روی نقشه 2.5 بعدی و در GIS سه بعدی.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر