1. معرفی
معادلات دیفرانسیل جزئی (PDE) به طور گسترده ای برای مدل سازی و حل بسیاری از مسائل معکوس در پردازش تصویر و بینایی کامپیوتری استفاده می شود. PDE از نوع Laplacian یا p -Laplacian با موفقیت در بسیاری از کاربردها مانند حذف نویز تصویر، بازیابی، تقسیمبندی و نقاشی داخلی استفاده شدهاند. [ 1 ، 2 ، 3 ، 4 ] و ارجاعات موجود در آن را ببینید. PDE ها از نوع Hamilton-Jacobi نقش اصلی را در مورفولوژی ریاضی پیوسته ایفا می کنند. آنها برای مدلسازی بسیاری از عملگرهای مورفولوژیکی پیوسته، مانند اتساع، فرسایش، تسطیح یا تبدیل حوضه [ 5 ، 6 ، 7 ، 8 ، 9 استفاده شده اند.]. با این حال، بسیاری از این مدلها بر روی تصاویر تعریفشده در حوزه اقلیدسی تمرکز میکنند که در آن گسستهسازی، بر اساس تفاوتهای محدود، عناصر محدود، حجمهای محدود و غیره، به خوبی بررسی و بهطور سنتی مورد استفاده قرار میگیرد.
از سوی دیگر، با توسعه فناوری اسکن سه بعدی، اکنون به راحتی می توان مدل های سه بعدی را از اشیاء واقعی به همراه تصاویر استاندارد نقاشی شده روی آنها تولید کرد. اسکنرهای LIDAR (Light Detection and Ranging) به فرد اجازه می دهد تا با تخمین فاصله بین حسگرها و اجرام زمین، ابرهای نقطه ای تولید کند و به علم زمین علاقه پیدا کرده است. [ 10 ، 11 ، 12 ، 13 را ببینید]. این اسکنرها عموماً دادههای خام را به شکل ابرهای نقطهای سازمانیافته (نویزدار) ارائه میکنند که نمونههای سطح را با تصاویر روی ابرهای نقطه نشان میدهند. با افزایش محبوبیت و کاربردهای بسیار گسترده در علوم زمین، هنر، پزشکی و امنیت تولید، علاقه فزاینده ای برای انتقال ابزارهای مبتنی بر PDE برای پردازش سیگنال/تصویر به پردازش تصویر در ابرهای نقطه ای وجود دارد. گسسته سازی عملگرهای دیفرانسیل در مقایسه با رویکردهای ذکر شده قبلی دشوارتر می شود.
روش های مختلفی برای حل عددی PDE ها روی سطوح وجود دارد [ 14 ، 15 ، 16 ]. با این حال، این روشها مستقیماً ابرهای نقطه سه بعدی خام را پردازش نمیکنند و نیاز دارند که ابرهای نقطه در یک نمایش مناسب باشند. می توان چندین روش را نقل کرد که می توان آنها را با توجه به بازنمایی به چهار دسته طبقه بندی کرد:
-
روشهایی با استفاده از نمایش صریح سطوح نشاندادهشده توسط یک تابع پارامتری: این مربوط به پیوست کردن یک دامنه پارامتری دو بعدی است. ( u , v )(�,�)به شی 3 بعدی با تکیه بر پارامترسازی خاص سطح داده شده، عملگرهای دیفرانسیل را می توان به صورت تحلیلی تعریف و محاسبه کرد [ 17 ، 18 ]. با این حال، محاسبه پارامترسازی برای سطوح داده شده دلخواه یک کار دشوار است و تغییرات توپولوژیکی به سختی قابل کنترل است.
-
روشهایی با استفاده از نمایشهای ضمنی سطوح که با یک تابع مجموعه سطح صفر از یک تابع فاصله علامتدار در حوزههای اقلیدسی نشان داده میشوند. سپس عملگرهای دیفرانسیل با ترکیب عملگرهای دیفرانسیل اقلیدسی با پیش بینی در جهت عادی تقریب می شوند [ 1 ، 19 ]. به عنوان مثال، در [ 20 ]، مختصات نزدیکترین نقطه برای هر نقطه از سطح استفاده شده است، و الگوریتم های سریع را می توان در حوزه های اقلیدسی به دست آورد. نمایش های ضمنی می توانند به راحتی با تغییرات توپولوژیکی مقابله کنند، اما همه داده ها باید به دامنه تعریف تابع ضمنی گسترش داده شوند.
-
روشهایی با استفاده از هندسه ذاتی برای مطالعه مسائل تغییرات به طور مستقیم بر روی سطح به عنوان یک شبکه مثلثی نشان داده شده است. لای و چان اخیراً [ 14 ] چارچوبی را برای پردازش تصویر درونی روی سطوح پیشنهاد کرده اند. آنها عملگرهای دیفرانسیل سطحی مانند گرادیان و واگرایی سطح را با تعاریف خاص هندسه دیفرانسیل ذاتی تقریب میکنند. روش های ذاتی به هیچ گونه پیش پردازشی نیاز ندارند، اما به یک طرح گسسته سازی خاص روی مثلث ها نیاز دارند.
-
روشهای حل PDEها مستقیماً روی ابرهای نقطه [ 15 ، 16 ] با استفاده از نمایشهای میانی برای تقریب عملگرهای دیفرانسیل روی ابرهای نقطه. نویسندگان در [ 16 ] از مثلث بندی محلی استفاده می کنند که نیاز به پیش پردازش دارد. این پیش پردازش برای تخمین عملگرهای دیفرانسیل روی مش های مثلثی مورد نیاز است. سپس این روش را می توان بیشتر به عنوان یک روش ذاتی طبقه بندی کرد. نویسندگان [ 15 ] یک تقریب محلی منیفولد را با استفاده از متحرکترین مربعات از k محاسبه میکنند.-نزدیک ترین همسایه ها از این سیستم مختصات محلی، یک تانسور متریک محلی در هر نقطه محاسبه می شود به طوری که تمایز در منیفولد ساده می شود. بنابراین این روش را می توان به عنوان یک روش صریح دسته بندی کرد.
در کارهای قبلی ما [ 21 ، 22]، ما رویکرد متفاوتی را پیشنهاد کردهایم که میتواند هم با مشهای سه بعدی و هم با ابرهای نقطهای از اتصال دلخواه کنار بیاید. برای دستیابی به این هدف، چارچوب معادله اختلاف جزئی (PdE) را پیشنهاد کردیم. این روش رویکرد جدیدی را ارائه می دهد که می توان از آن برای غلبه بر تمام مشکلات و معایب روش های ذکر شده در بالا استفاده کرد. اجازه دهید به طور خلاصه روش را یادآوری کنیم. یک نمودار محلی یا غیر محلی ابتدا از هندسه سطوح یا ابرهای نقطه ای ساخته می شود. سپس رونویسی PDE ها روی گراف انجام شده و با استفاده از چارچوب PdE ها حل می شود. رویکرد ما به فرد اجازه می دهد تا بسیاری از فرآیندها را در پردازش تصویر کلاسیک به سطوح و ابرهای نقطه منتقل و گسترش دهد. بر خلاف سایر رویکردها، روش ما مزایای زیر را ارائه میکند: (1) هیچ پارامتری، پیش پردازش و یا فرضی لازم نیست. و (2) پردازش محلی و غیر محلی یکپارچه شده است. از آنجایی که ابرهای نقطه سه بعدی و مش های مثلثی می توانند توپولوژی های بسیار متفاوتی داشته باشند، ما پیشنهاد کردیم به روش های مبتنی بر نمودار تکیه کنیم که مستقیماً در هر حوزه گسسته کار می کنند.
در این مقاله، ما چارچوب PdE را اتخاذ میکنیم و روی برخی از عملگرهای مورفولوژیکی پیوسته مبتنی بر PDE در حوزه اقلیدسی تمرکز میکنیم: اتساع/فرسایش، جریانهای انحنای متوسط و معادله Eikonal. یکی از مزایای قوی رویکرد ما این است که پردازش هندسه و رنگ مرتبط با ابرهای نقطه سه بعدی خام را امکان پذیر می کند. انگیزه ما گسترش کاربردهای آنها برای پردازش سطوح سه بعدی و ابرهای نقطه سه بعدی است. ما این رویکرد را برای اهداف ژئو انفورماتیک در نمونه هایی مانند بازیابی، حذف نویز، رنگ آمیزی، استخراج شی یا تخمین مسیر حداقل اعمال می کنیم.
مورفولوژی ریاضی (MM) یک رویکرد غیرخطی محبوب برای پردازش تصویر است که کاربردهای متعددی از جمله تجزیه و تحلیل شکل و بافت، پردازش تصویر زیست پزشکی، تشخیص سند یا تکنیکهای چند تفکیکپذیری پیدا کرده است [ 23 ، 24 ]. MM طیف گسترده ای از اپراتورها را برای رسیدگی به مشکلات مختلف پردازش تصویر ارائه می دهد. این عملگرها را می توان بر حسب ابزارهای جبری (گسسته) یا PDE تعریف کرد. ما اکنون به طور خلاصه برخی از این عملگرها را که به عنوان معادلات همیلتون-جاکوبی، مجموعههای سطح تکامل منحنی و جریانهای مورفولوژیکی فرموله شدهاند، مرور میکنیم. برای بررسی دقیق و الگوریتمهای عددی، [ 2 ، 25 ] را ببینید.
معادله همیلتون-ژاکوبی برای اتساع/فرسایش مورفولوژیکی: اکثر عملگرهای پیوسته مورفولوژیکی را می توان با معادله همیلتون-جاکوبی مدل کرد. اجازه دهید یک تصویر را به عنوان تابع پیوسته Lipschitz فرض کنیم f: Ω ⊂آرn→ آر�:Ω⊂��→�. PDE های کلی با مقدار اولیه زیر را در نظر بگیرید:
محلول این هامیلتونی محلول ویسکوزیته [ 26 ] نامیده می شود. برای یک H همیلتونی خاص ، نوعی PDE مورفولوژیکی متعارف فرموله شده است:
محلول های ویسکوزیته مربوطه با اتساع مطابقت دارد δبf( x )���(�)و یک فرسایش ϵبf( x )���(�)از تابع f( x )�(�)که تعریف میشود:
استفاده به عنوان تابع ساختاری B ( x )�(�)به اصطلاح تابع ساختاری درجه دوم (یا سهمی) چند مقیاسی:
به دلیل ویژگی های نیمه گروه بودن آن (تفکیک پذیری ابعاد و تغییر ناپذیری برای تبدیل دامنه [ 27 ])، تابع ساختاری پتی( x )پتی(ایکس)را می توان در مورفولوژی متعارف در نظر گرفت که نقشی مشابه هسته گاوسی برای فیلتر خطی ایفا می کند. اشکال خاص دیگر معادله مدل همیلتون-جاکوبی ( 1 ) مورفولوژی تخت را توسط دیسک ها پوشش می دهد [ 7 ] (یعنی، fتی= ± | | ∇ f| |�تی=±||∇�||و همچنین عملگرهایی با توابع ساختار مقعر P -power عمومی تر (به عنوان مثال، fتی= ±| | ∇ f| |پ�تی=±||∇�||پ). برای کاربرد مدل اخیر در مورفولوژی تطبیقی، [ 25 ] و منابع موجود در آن را ببینید.
این نسخههای اتساع و فرسایش همچنین مبنای سایر عملگرهای مورفولوژیکی پیوسته مانند تسطیح یا حوضه پیوسته با معادله ایکونال هستند [ 28 ]. برای کاربرد در تصاویر، PDE ها گسسته می شوند و از طرح های عددی خاصی استفاده می شود: به عنوان مثال، [ 29 ، 30 ، 31 ] و اخیراً، نوعی از تکنیک انتقال تصحیح شار [ 32 ، 33 ] مورد استفاده برای تصاویر تانسور را ببینید. و پردازش مورفولوژیکی ماتریس [ 34 ]. سایر PDE های مورفولوژیکی، بر اساس تکامل منحنی، مجموعه سطح یا معادله Eikonal، برای تقسیم بندی تصویر، محاسبه فاصله تعمیم یافته یا تجزیه و تحلیل شکل استفاده می شوند.
تکامل منحنی، مجموعه های سطح و جریان های مورفولوژیکی: فرمول مجموعه سطح برای توصیف تکامل منحنی توسط Osher و Sethian [ 2 ] معرفی شده است . مزایای شناخته شده ای مانند برخورد با خود تقاطع ها یا تغییرات توپولوژیکی را فراهم می کند و به راحتی می توان آن را گسترش داد. آردآردبا د≥ 1د≥1. یک منحنی پارامتری داده شده است Γ0: [ 0 , 1 ] → ΩΓ0:[0،1]→Ω، در یک دامنه Ω به دلیل تأثیر یک سرعت تکامل می یابد افاف:
با اف: Ω → Rاف:Ω→آرتابعی روی Ω که به انحنای و نرمال بستگی دارد نن. هدف روش مجموعه سطح یافتن یک تابع است ϕ ( x , y)�(ایکس،�)، به طوری که در هر زمان t ، منحنی در حال تحول ΓتیΓتیرا می توان با مجموعه سطح صفر ϕ ارائه کرد . به عبارت دیگر Γتی= { x | ϕ ( x , y) = 0 }Γتی={ایکس|�(ایکس،�)=0}و تکامل منحنی را می توان با حل کردن زیر پردازش کرد:
جایی که ϕ0( x )�0(ایکس)جاسازی اولیه Γ یا یک تصویر اولیه است. تابع سرعت افافمی تواند به گرادیان یا انحنای متوسط بستگی داشته باشد. برای اف= 1 ±اف=±1، اتساع و فرسایش را دریافت می کنیم:
برای اف= دمن v (∇ ϕ| ∇ϕ |)اف=دمن�∇�|∇�|، جریان انحنای متوسط را دریافت می کنیم:
که در حذف نویز تصویر، تقسیم بندی، بازسازی و مدل های کانتور فعال کاربرد پیدا کرد. در این مقاله، معادله مجموعه سطح کلی زیر را بر روی سطوح یا ابرهای نقطه ای در نظر می گیریم:
برای حل این PDE در سطح S ، عملگرهای دیفرانسیل را با مشابه گسسته آنها که توسط چارچوب PdE بر روی یک گراف تطبیق داده شده است جایگزین می کنیم. G ( V، ای، w )جی(�،�،�). بنابراین، رونویسی معادله PDE ( 10 ) در نمودار به صورت زیر تعریف می شود:
جایی که اچ^اچ^تقریبی است از اچاچعملکرد، و ∇+w،∇–w،کw∇�+،∇�–،ک�شیب خارجی، گرادیان داخلی و میانگین انحنای تعریف شده بر روی یک نمودار وزنی هستند. به ترتیب در قسمت زیر این عملگرها تعریف خواهند شد.
بقیه این مقاله به شرح زیر سازماندهی شده است. در بخش 2 ، عملگرهای تفاوت جزئی را روی نمودارها ارائه می کنیم. ما عملگرهای مورفولوژیکی را روی نمودارها در بخش 3 ارائه می کنیم . در بخش 4 ، ما ساخت یک نمودار وزنی مبتنی بر وصله از یک ابر نقطه و نمونه هایی از فیلتر کردن، رنگ آمیزی و تقسیم بندی تصاویر روی ابرهای نقطه را ارائه می کنیم. بخش آخر به پایان می رسد.
2. عملگرهای تفاوت جزئی در نمودارها
در این بخش تعاریف و عملگرها را بر روی نمودارها یادآوری می کنیم. این اساس چارچوب PdEs [ 35 ] را تشکیل می دهد که انتقال PDE ها را بر روی نمودارها امکان پذیر می کند. همه این تعاریف از [ 6 ، 9 ، 36 ] وام گرفته شده اند.
2.1. نمادها و مقدمات
یک نمودار وزنی G = ( V، ای، w )جی=(�،�،�)از یک مجموعه محدود تشکیل شده است V= {v1, … ,vن}�={�1،…،�ن}از N راس و یک مجموعه محدود E⊂ V× V�⊂�×�از لبه های وزن دار فرض می کنیم G بدون جهت، بدون حلقه های خود و بدون لبه های متعدد باشد. اجازه دهید ( u , v )(تو،�)لبه E باشد که دو راس u و v V را به هم وصل می کند . وزن آن، نشان داده شده با w ( u , v )�(تو،�)، نشان دهنده شباهت بین رئوس آن است. شباهت ها معمولاً با استفاده از یک تابع متقارن مثبت محاسبه می شوند w :V× V→ منآر+�:�×�→منآر+رضایت بخش w ( u ، v ) = 0�(تو،�)=0اگر ( u , v ) ∉ E(تو،�)∉�. نماد u ∼ vتو∼�همچنین برای نشان دادن دو راس مجاور هم استفاده می شود. درجه یک راس u به صورت تعریف می شود δw( u ) =∑v ~ uw ( u , v )��(تو)=∑�∼تو�(تو،�). اجازه دهید اچ( V)اچ(�)فضای هیلبرت از توابع با ارزش واقعی تعریف شده در رئوس یک نمودار باشد. یک تابع f:V→ منآر�:�→منآراز اچ( V)اچ(�)یک مقدار واقعی را اختصاص می دهد f( تو )�(تو)به هر رأس u ∈ Vتو∈�. فضای عملکرد اچ( V)اچ(�)دارای محصول درونی معمولی است ⟨ f، ساعت ⟩اچ( V)=∑v ∈ Vf( v ) h ( v )〈�،ساعت〉اچ(�)=∑�∈��(�)ساعت(�)، جایی که f، h : V→ آر�،ساعت:�→آر.
2.2. تفاوت عملگرها در نمودارهای وزنی
اجازه دهید G = (V،ای، w )جی=(�،�،�)یک نمودار وزنی باشد، f:V→منآر�:�→منآرتابعی از اچ(V)اچ(�)و w : V× V→آر+�:�×�→آر+یک تابع وزن که به عنوان معیار تشابه بین دو راس تعریف می شود.
تعریف 1.
مشتق جهت (یا مشتق لبه) f، در یک راس u ∈ Vتو∈�، در امتداد یک لبه e = ( u , v )ه=(تو،�)، به عنوان … تعریف شده است:
عملگرهای مشتق جزئی جهتی مورفولوژیکی خارجی و داخلی به ترتیب به صورت [ 9 ] تعریف می شوند:
جایی که ( x )+= حداکثر ( x , 0 )(ایکس)+=حداکثر(ایکس،0)و ( x )–= − دقیقه ( x , 0 )(ایکس)–=–دقیقه(ایکس،0).
تعریف 2.
گرادیان های وزنی غیرمحلی گسسته رو به باد به صورت زیر تعریف می شوند:
جایی که w با تابع وزن تعریف شده در نمودارها مطابقت دارد.
این Lپ�پو L∞�∞هنجارهای این گرادیان ها توسط:
تعریف 3.
دو لاپلاسی نرمال شده در نمودار به صورت زیر تعریف می شود:
تعریف 4.
∞-لاپلاسین در نمودار به صورت زیر تعریف می شود:
تعریف 5.
ناهمسانگرد p-لاپلاسین در نمودار یک تابع f: V→ آر�:�→آربرای 1 ≤ p < ∞1≤پ<∞به عنوان … تعریف شده است:
تعریف 6.
انحنای متوسط کwک�تابع f at u ∈ Vتو∈�در یک نمودار به صورت زیر تعریف می شود:
این مربوط به:
با s i gn ( r ) = {1– 1من fr ≥ 0o t h e r w i s e .سمن��(�)=1من��≥0–1�تیساعته��منسه.
3. عملگرهای مورفولوژیکی روی نمودارها
بر اساس گرادیان گسسته در نمودارهای وزندار، اکنون کلاسی از معادلات گسسته را ارائه میکنیم که تعاریف مبتنی بر PDE از فرسایش، اتساع، جریانهای ∞-لاپلاسی و میانگین انحنا، مجموعه سطح زمانی و معادله ایکونال را تقلید میکنند.
3.1. اتساع و فرسایش در نمودارها برای فیلتر کردن
اتساع و فرسایش یک عملکرد اولیه f0: V→ آر�0:�→آربا [ 6 ] تعریف می شود:
برای 1 ≤ p ≤ ∞1≤پ≤∞، با شرایط اولیه f( u ، 0 ) =f0( تو )�(تو،0)=�0(تو). بیان گسسته گرادیان داخلی و خارجی یک طرح عددی طیفی مستقیم را با نماد معمول تشکیل می دهد. fn( u ) = f( u , n Δ t )��(تو)=�(تو،�Δتی). طرح تکرار شونده برای اتساع و فرسایش را می توان به صورت زیر تعریف کرد:
با در نظرگرفتن Lپ�پهنجار، معادله تبدیل می شود:
توجه داشته باشید که در این فرم، ضرایب این معادله جبری می تواند به داده ها بستگی داشته باشد.
برای w = 1�=1(گراف بدون وزن) و برای یک گراف شبکه ای، این با طرح گسسته سازی مرتبه اول اوشر و ستیان مطابقت دارد.
با در نظرگرفتن L∞�∞هنجار، این معادله می شود:
با Δ t = 1Δتی=1و w = 1�=1، معادلات اتساع و فرسایش تبدیل می شوند:
در مورد خاص که Δ t = 1Δتی=1اتساع و فرسایش را می توان به ترتیب به عنوان اتساع غیر موضعی تکراری (NLD) و فرسایش غیر محلی (NLE) تفسیر کرد. این فرآیندها را می توان به صورت زیر بیان کرد:
جایی که:
برای اتساع و:
جایی که:
برای فرسایش
این رویکرد می تواند برای تعریف سایر عملگرهای مورفولوژیکی بر اساس عملگرهای δ فرسایش ε یا اتساع ، مانند دهانه ها استفاده شود.γ= ( δϵ )�=(��)، بسته شدن ϕ = ( ε δ)�=(��)یا شیب های مورفولوژیکی ( δ– ϵ )(�–�). به عنوان مثال، ما فرمول بندی عملیات بسته شدن غیرمحلی (NLC) را پیشنهاد می کنیم که می تواند به صورت زیر تعریف شود:
با t ∈ [ 0 , 2 s [تی∈[0،2س[، s ∈آر+س∈آر+و:
این PdE دارای یک ضریب سوئیچینگ وابسته به زمان است که باعث می شود به عنوان اتساع δ برای عمل کندt ∈ [ 0 , s ]تی∈[0،س]و یک فرسایش ϵ برای t ∈ [ s , 2 s ]تی∈[س،2س]. این فرمول با PDE های کلاسیک یک [ 5 ] متفاوت است و در زمان سوئیچینگ ناپیوستگی ایجاد نمی کند. این را می توان به عنوان فرآیند تکراری غیر محلی زیر تفسیر کرد:
به طور مشابه، می توان گشایش غیر محلی (NLO) را به عنوان یک فرآیند تکراری بیان کرد.
3.2. بی نهایت لاپلاسین و انحنای متوسط جریان روی نمودارها
در این بخش، یک طرح عددی برای ∞-لاپلاسین و جریان انحنای متوسط روی نمودارها ارائه میکنیم. ما نشان خواهیم داد که این جریان ها را می توان با استفاده از اتساع غیر موضعی یا فرسایش غیر موضعی که در بالا تعریف شده است، فرموله کرد. اگر PDE سهموی زیر را روی نموداری که ∞-لاپلاسین را شامل می شود در نظر بگیریم:
با استفاده از علامت گذاری fn( u ) = f( u , n Δ t )��(تو)=�(تو،�Δتی)، می توان ∞-لاپلاسی را با تعریف آن جایگزین کرد ( 19 ):
اگر Δ t = 1Δتی=1، ∞-لاپلاسین را می توان به عنوان یک فیلتر مورفولوژیکی متقارن تفسیر کرد که به اتساع غیر موضعی و فرسایش غیر موضعی بستگی دارد. در واقع، معادله ( 38 ) را می توان به صورت زیر بازنویسی کرد:
جایی که:
برای گسسته سازی معادله جریان انحنای متوسط پیوسته:
ما پیشنهاد می کنیم انحنای پیوسته را با انحنای نمودار جایگزین کنیم و از طرح مورفولوژیکی زیر استفاده کنیم:
گسسته سازی زمان منجر به معادله زیر می شود:
می توان توجه داشت که برای |کw| ≠ 0|ک�|≠0و Δ t <1|کw(fn( u ) ) |Δتی<1|ک�(��(تو))|، معادله قبلی با فیلتر میانگین غیر محلی زیر مطابقت دارد:
جایی که:
می توان گفت که این فیلتر با توجه به علامت انحنا، بین اتساع غیر موضعی تصویر یا فرسایش غیر موضعی تصویر متناوب می شود.
برای |کw(fn( u ) ) | ≠ 0|ک�(��(تو))|≠0و Δ t =1|کw(fn( u ) ) |Δتی=1|ک�(��(تو))|، میانگین جریان انحنای گسسته مربوط به فیلتر میانگین غیر محلی زیر است:
جایی که:
نLآ1ن�آ1یک فیلتر مورفولوژیکی غیر موضعی است که با توجه به علامت انحنای بین اتساع غیر موضعی و فرسایش غیر موضعی متناوب است.
3.3. معادلات مجموعه سطح روی نمودارها
اکنون، رونویسی خود از معادلات مجموعه سطح PDE را بر روی نمودارهای وزنی توپولوژی دلخواه و الگوریتمی برای حل معادله Eikonal روی نمودارها ارائه میکنیم.
تنظیم سطح وابسته به زمان: اجازه دهید G ( V، ای، w )جی(�،�،�)یک نمودار وزنی باشد یک جبهه در حال تکامل در G به عنوان یک زیر مجموعه تعریف می شود Ω0⊂ VΩ0⊂�و به طور ضمنی در زمان اولیه توسط یک تابع مجموعه سطح نشان داده می شود ϕ0=U0=χΩ0– χΩج0�0=�0=�Ω0–�Ω0ج، جایی که χ : V→ { 0 , 1 }�:�→{0،1}تابع نشانگر است و Ωج0Ω0جمکمل است Ω0Ω0. به عبارت دیگر، ϕ0�0برابر با یک در Ω0Ω0و – 1–1در مکمل آن
سپس، از معادله عمومی ( 7 ) که بر روی نمودارها جابجا شده است، انتشار جلویی را می توان به صورت زیر توصیف کرد:
با اف∈ اچ( V)اف∈اچ(�)، و w : V× V→آر+�:�×�→آر+تابع وزن است. بر اساس تعریف قبلی از اتساع و فرسایش گسسته در نمودارها [ 9 ، 37 ]، انتشار جلویی را می توان به عنوان یک فرآیند مورفولوژیکی با مجموع اتساع و فرسایش زیر بیان کرد:
برای حل این فرآیند اتساع و فرسایش، بر خلاف مورد PDEs، به لطف مشتقاتی که مستقیماً در یک فرم گسسته بیان میشوند، نیازی به گسستهسازی فضایی نیست. سپس، طرح کلی تکرار شونده برای محاسبه ϕ در زمان t + 1تی+1برای همه u ∈ Vتو∈�از رابطه زیر بدست می آید:
در هر زمان t + 1تی+1، مقدار جدید در یک راس u فقط به مقدار آن در زمان t و مقادیر موجود در همسایگی آن بستگی دارد. این معادله را می توان بسته به علامت به دو معادله مستقل تقسیم کرد افاف:
مجموعه سطح ثابت: معادله ایکونال: وقتی اف≥ 0اف≥0در Ω، رابطه بین فرمول مجموعه سطح ( 48 ) و معادله ایکونال ( اف( x ) | | ∇ تی( x ) | | = 1 )(اف(ایکس)||∇تی(ایکس)||=1)از تغییر متغیر زیر ناشی می شود: ϕ ( x , y) = t – T( x )�(ایکس،�)=تی–تی(ایکس)(جایی که تی( x )تی(ایکس)زمان رسیدن منحنی به نقطه x است ).
با استفاده از تعاریف قبلی معادلات تکامل مورفولوژیکی، می توان همان رابطه را فرموله کرد و نسخه ای مبتنی بر PdEs از معادله Eikonal را به دست آورد که بر روی نمودارهای وزنی توپولوژی دلخواه تعریف شده است. اجازه دهید G ( V، ای، w )جی(�،�،�)یک نمودار وزنی با توابع T و افافتعریف شده در اچ( V)اچ(�). زیرا اف≥ 0اف≥0فرآیند تکامل توصیف شده توسط معادله ( 48 ) را می توان به عنوان یک فرآیند اتساع مشاهده کرد و معادله تکامل را می توان به صورت زیر بازنویسی کرد:
با تغییر متغیر مشابه ϕ ( u ) = t − T( تو )�(تو)=تی–تی(تو)، یک نفر دارد:
و سپس،
در نهایت، با پ= 1 / Fپ=1/اف، ما یک انطباق گسسته از معادله ایکونال را بر روی نمودار وزنی بدست می آوریم که یک فرآیند فرسایش مورفولوژیکی را توصیف می کند و به صورت زیر تعریف می شود:
از معادله ( 55 ) و با استفاده از هنجارهای تعریف شده در معادلات ( 16 ) و (17) با ویژگی حداقل ( x ، 0 ) = – حداکثر ( -x ، 0 ) _دقیقه(ایکس،0)=–حداکثر(–ایکس،0)، معادلات زیر را برای Lپ�پو L∞�∞هنجارها:
-
چه زمانی p ∈ { 1 , 2 }پ∈{1،2}:
با یک تبدیل ساده از متغیرها و برخی نمادهای مرسوم، معادله ( 56 ) را می توان به صورت زیر بازنویسی کرد:
جایی که x = f( تو ) ،ساعتمن=1 /wu v–––––√، n = کارت ( N( u ) ) ,a= { f(vمن) |vمن∈ ن( تو )باi = 1 ، . . . , n } , C= پ( تو )ایکس=�(تو)،ساعتمن=1/�تو�،�=کارت(ن(تو))،آ={�(�من)|�من∈ن(تو)بامن=1،...،�}،سی=پ(تو).
-
چه زمانی p = ∞پ=∞:
با استفاده از همان تبدیل متغیرها، به دست می آوریم:
راه حل های محلی (یعنی راه حل برای یک راس، با فرض ثابت نگه داشتن بقیه) معادله ( 55 ) روی یک نمودار وزنی توسط معادلات ( 57 ) و ( 59 ) ارائه شده است . هر دو معادله به وضوح مستقل از فرمول بندی گراف هستند و می توانند برای نمودارهای وزن دار توپولوژی دلخواه اعمال شوند.
| الگوریتم 1: ایکس¯ایکس¯محاسبه (راه حل محلی). |
 |
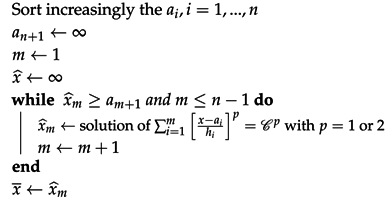
برای مورد p = { 1 , 2 }پ={1،2}راه حل محلی ایکس¯ایکس¯در یک راس خاص می توان به راحتی با یک الگوریتم تکرار شونده همانطور که در الگوریتم 1 توضیح داده شد به دست آورد. این مبتنی بر دانش است که k وجود دارد ( 1 ≤ k ≤ n1≤ک≤�)، به طوری که آک≤ایکس¯≤آk + 1آک≤ایکس¯≤آک+1، و ایکس¯ایکس¯حل منحصر به فرد معادله است. سپس، الگوریتم شامل مرتب سازی فزاینده مقادیر است آمنآمنو محاسبات راه حل موقت ایکسˆمترایکس^مترتا شرط ایکسˆمتر≤آm + 1ایکس^متر≤آمتر+1راضی است. برای محاسبه حل معادله Eikonal در هر راس، از طرح به روز رسانی Fast Marching [ 37 ] استفاده کردیم.
انتشار برچسب: ما یک راه ساده برای انتشار یک مجموعه اولیه از برچسب ها (از مجموعه ای از رئوس دانه ها) پیشنهاد می کنیم. V0�0) از طریق نمودار، به دنبال تکامل جبهه های انتشار. سپس، جبهه در حال انتشار که به یک راس می رسد، لزوماً جلویی است که از نزدیکترین دانه (با توجه به تابع وزن) می آید. بنابراین ، هر بار که فاصله ای روی یک راس u به روز می شود ، همسایه v را پیدا می کنیم که نزدیک ترین هم به u و هم به دانه است.v ∈V0�∈�0، و برچسب v را تا راس فعلی u گسترش دهید . فرآیند برچسب زدن را می توان با فرمول زیر خلاصه کرد: هر بار f( تو )�(تو)به روز شده است، برچسب L ( u )�(تو)از رابطه زیر بدست می آید:
4. ساخت نمودار و نمونه هایی از پردازش تصویر در ابرهای نقطه ای
4.1. ساخت نمودار از تصاویر روی ابرهای نقطه سه بعدی
ما یک سطح یا یک ابر نقطه ای را در نظر می گیریم که توسط مجموعه ای از رئوس S تشکیل شده است ، مانند اس= {ایکس1،ایکس2، . . . }اس={ایکس1،ایکس2،...}، با ایکسمن∈آر3ایکسمن∈آر3. به هر نقطه خام ایکسمن∈ اسایکسمن∈اس، یک راس گراف G را برای تعریف مجموعه ای از رئوس V مرتبط می کند . داده های روی تصویر یا ابر نقطه را می توان به عنوان یک تابع تعریف کرد f: V→ آر�:�→آر. ساخت چنین نموداری شامل مدلسازی روابط همسایگی بین دادهها از طریق تعریف مجموعهای از یالهای E و با استفاده از اندازهگیری شباهت زوجی است.μ : V× V→ منآر+�:�×�→منآر+. در مورد خاص تصاویر، لبههای مبتنی بر همسایگیهای هندسی بهخوبی برای نمایش هندسه تطبیق داده میشوند.
از یک ابر نقطه، یک نمودار k -nn ساخته می شود. k تعداد یال های فرود را در هر راس کنترل می کند و به کاربرد بستگی دارد. به طور کلی، یک مقدار کم (به عنوان مثال، k = 5ک=5) برای یک پردازش محلی و یک مقدار بالاتر برای یک پردازش غیر محلی تنظیم شده است.
از یک مش، مجموعه E از نمودار ضمنی در مش مثلثی استنتاج می شود. شباهت بین دو رئوس با یک معیار تشابه محاسبه می شود س : ای→ منآر+س:�→منآر+، که برآورده می کند:
توابع تشابه رایج به شرح زیر است:
که برای آن پارامتر واریانس σ> 0�>0معمولاً به تغییر تابع μ بستگی دارد .
تابع f که برای توصیف داده ها در یک راس u استفاده می شود به عنوان بردار ویژگی در نظر گرفته می شود. بسته به ماهیت ویژگی هایی که برای پردازش نمودار استفاده می شود، می توان چندین انتخاب برای بیان بردارهای ویژگی در نظر گرفت. در زمینه پردازش تصویر، می توان از مقیاس خاکستری ساده یا بردار ویژگی رنگ استفاده کرد افتوافتویا بردار ویژگی پچ افτتو=⋃v ∈دبلیوτ( تو )افvافتو�=⋃�∈دبلیو�(تو)اف�(یعنی مجموعه مقادیر افvاف�که v در یک پنجره مربع است دبلیوτ( تو )دبلیو�(تو)از اندازه ( 2 τ+ 1 ) × ( 2 τ+ 1 )(2�+1)×(2�+1)در مرکز پیکسل u ). توجه داشته باشید که بردار دوم اجازه می دهد تا ویژگی های غیر محلی را برای τ≥ 1�≥1. اکنون روش خود را برای ساخت لکه ها بر روی سطوح و ابرهای نقطه ای ارائه می کنیم.
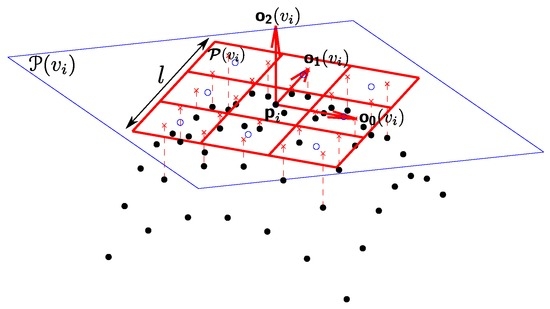
ساخت وصله برای ابرهای نقطه سه بعدی: گسترش مفهوم وصله به داده های ابر نقطه سه بعدی کار آسانی نیست. در [ 21 ]، ما یک تعریف جدید از وصلهها ارائه کردهایم که میتواند برای هر نمایش گراف مرتبط با شبکهها یا ابرهای نقطهای استفاده شود. به طور خاص، در اطراف هر رأس، یک شبکه دو بعدی (پچ) ایجاد می کنیم که همسایگی نزدیک را توصیف می کند. این شبکه بر روی صفحه مماس نقطه (یعنی راس) تعریف شده است. سپس، وصله بر این اساس جهتگیری میشود و در نهایت، پچ با میانگین وزنی مقادیر سیگنال نمودار در همسایگی محلی پر میشود. مرحله اول شامل تخمین جهت هر پچ است. مرحله دوم شامل ساخت وصله واقعی است. مجموعه مقادیر داخل پچ رأسu نشان داده می شود پ–→( تو )پ→(تو). اجازه دهید سیک( تو )سیک(تو)سلول k- امین پچ ساخته شده در اطراف u را نشان دهیدk ∈ { 1 , ⋯ ,n2}ک∈{1،⋯،�2}. با فرآیند ساخت پچ پیشنهادی، می توان مجموعه را تعریف کرد Vک( u ) = { v|پ→“v∈سیک( تو ) }�ک(تو)={�|پ→�“∈سیک(تو)}به عنوان مجموعه ای از رئوس v که به سلول وصله k- امین u اختصاص داده شده است . سپس بردار پچ به صورت تعریف می شود پ–→( u ) =(∑v ∈Vک( تو )w (ج→ک،پ→v) f( v )∑v ∈Vک( تو )w (ج→ک،پ→v))تیk ∈ { 1 , ⋯ ,n2}پ→(تو)=∑�∈�ک(تو)�(ج→ک،پ→�)�(�)∑�∈�ک(تو)�(ج→ک،پ→�)ک∈{1،⋯،�2}تیبا w (ج→ک،پ→تو) = exp ( –| |ج→ک–پ→“تو| |22σ2)�(ج→ک،پ→تو)=انقضا(–||ج→ک–پ→تو“||22�2)، برای کدام جک→جک→بردار مختصات مرکز سلول وصله k -ام است. این وزن دهی ما را قادر می سازد تا توزیع نقطه در سلول های پچ را در نظر بگیریم تا میانگین بردارهای ویژگی آنها را محاسبه کنیم. شکل 1 a روش ساخت پچ ما را خلاصه می کند.
4.2. رنگ آمیزی محلی، غیر محلی و فیلتر کردن تصاویر روی ابرهای نقطه ای
در این بخش، از طریق چند مثال کاربرد عملگرهای مورفولوژیکی بر روی نمودارها را برای نقاشی درونی، فیلتر کردن تصاویر بر روی ابرهای نقطه ای نشان می دهیم. تمام پردازشها در C++ پیادهسازی شدهاند و در لپتاپ فعلی که روی سیستمعامل گنو/لینوکس اجرا میشود تقریباً چند ثانیه طول میکشد.
Inpainting: Inpainting تصویر با استفاده از رویکرد مبتنی بر پچ توسط [ 38 ] پیشنهاد شده است. کارهای اخیر در مورد inpainting تمایل دارند رویکردهای محلی و غیر محلی را تحت یک فرمول بندی متغیر گسسته یا پیوسته متحد کنند (برای جزئیات بیشتر، [ 39 ، 40 ] و منابع موجود در آن را ببینید). در اینجا، ما در نظر می گیریم که تصاویر روی ابرهای نقطه ای در یک دامنه کلی که توسط یک نمودار تطبیقی نشان داده شده است، تعریف می شوند G = ( V، ای، w )جی=(�،�،�). ما هر دو رنگ داخلی و غیر محلی را به عنوان یک مشکل درون یابی در نظر می گیریم. اجازه دهید f0: V→ منآر�0:�→منآرتابع اولیه باشد اجازه دهید A ⊂ Vآ⊂�زیر مجموعه رئوس با مقادیر مجهول و ∂آ�آزیر مجموعه رئوس با مقادیر شناخته شده هدف از inpainting یافتن تابع f در حال گسترش استf0�0در V با حل معادله ∞-لاپلاس:
جواب f بی نهایت-هارمونیک است [ 40 ].
راه حل با این الگوریتم تکراری ساده بر اساس عملگر NLA معرفی شده در معادله ( 40 ) به دست می آید. در هر تکرار، فقط مرز داخلی ∂–A = { u ∈ A | ∃ v ~ u , v ∈ ∂الف }�–آ={تو∈آ|∃�∼تو،�∈�آ}درون یابی شده است:
در پایان هر تکرار، مجموعه ∂آ�آتوسط به روز رسانی می شود ∂آ( n + 1 )= ∂آ( n )∪∂–آ( n )�آ(�+1)=�آ(�)∪�–آ(�)، و ∂–آ( n + 1 )�–آ(�+1)از به روز رسانی می شود ∂آ( n + 1 )�آ(�+1). این الگوریتم زمانی متوقف می شود که مجموعه رئوس به رنگ خالی باشد.
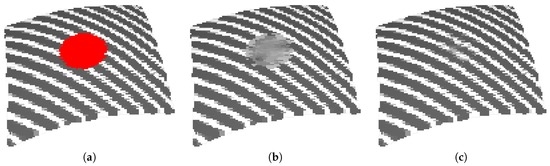
شکل 2 نتایج رنگ آمیزی یک ابر نقطه بافت مصنوعی با ثابت ( w = 1�=1) تابع وزن که به صورت محلی تعریف شده است ( شکل 2 ب) و با یک متریک تشابه مبتنی بر وصله تعریف شده در یک محله غیر محلی ( شکل 2 ج). روش ارائه شده در بخش 4.1 برای ساختن نمودار از ابر نقطه استفاده شده است. نتایج بهتری با پردازش غیر محلی با معیار تشابه مبتنی بر پچ به دست میآید. این طرح وزن دهی اطلاعات بافت را می گیرد و سپس می تواند الگوهای تکراری را درون یابی کند. شکل 3 نتیجه نقاشی یک ابر نقطه رنگی را نشان می دهد که از یک شی واقعی به دست آمده است.
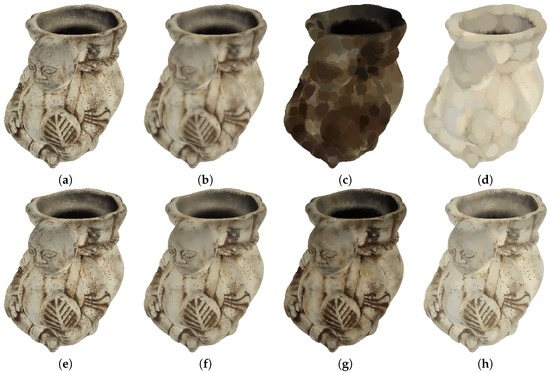
فیلتر کردن: ما چند نمونه از فیلتر کردن توسط عملگرهای مورفولوژیکی محلی و غیر محلی ارائه می دهیم: NLD (اتساع غیرمحلی)، NLE (فرسایش غیر محلی)، NLA (∞-لاپلاسین) و نLآ1ن�آ1(میانگین انحنا).
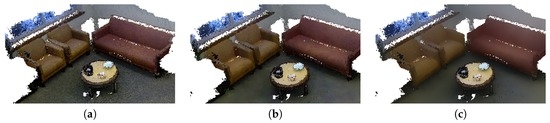
شکل 4 فیلتر کردن یک ابر نقطه رنگی را نشان می دهد نL Dن��، نL Eن��و نL Aن�آاپراتورها توابع وزن w از رنگ های ابر نقطه محاسبه می شود. نتایج با نشان داده شده است w ≠ 1�≠1و w = 1�=1. چه زمانی w ≠ 1�≠1، نتایج حذف نویز بهتر است زیرا لبه ها حفظ می شوند. شکل 5 فیلتر کردن یک ابر نقطه رنگی با چندین عملگر را نشان می دهد. را نLآ1ن�آ1عملگر تعریف شده در معادله ( 47 ) با تغییر فرآیند اتساع غیر موضعی و فرسایش غیر موضعی بر اساس علامت انحنا، با عملگر فیلتر مطابقت دارد. کwک�بر روی نمودار معادله ( 21 ). چه زمانی w = 1�=1، فیلتر قادر به بازیابی رنگ های روی ابرهای نقطه نیست. شکل 6 مقایسه ای از نتیجه به دست آمده با نL Aن�آو نLآ1ن�آ1اپراتورها در یک اتاق اسکن شده [ 41 ]. را نLآ1ن�آ1اپراتور با صاف کردن رنگ ها و حفظ جزئیات و خطوط، نتایج بهتری ایجاد می کند نL Aن�آاپراتور با حذف بسیاری از جزئیات صاف می شود.
4.2.1. فاصله وزنی تعمیم یافته، کوتاه ترین مسیر و معادله ایکونال برای تقسیم بندی تصویر بر روی ابرهای نقطه ای
معادله Eikonal تعریف شده در معادله ( 55 ) بر روی یک نمودار وزنی از توپولوژی دلخواه به فرد اجازه می دهد تا فواصل تعمیم یافته را بر روی نمودارها محاسبه کند. ما از معادله Eikonal با انتشار برچسب برای محاسبه کوتاهترین مسیر و تقسیمبندی روی مشها یا تصاویر نقاشی شده روی ابرهای نقطه استفاده میکنیم.
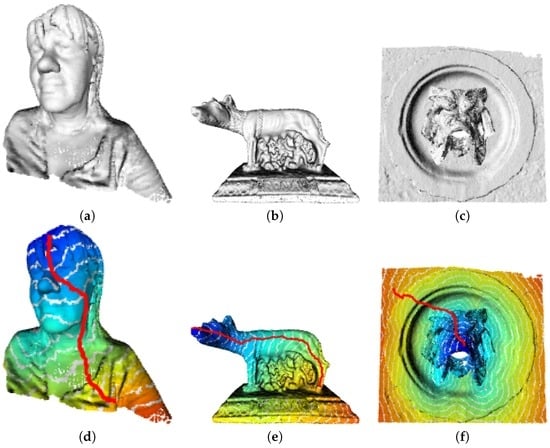
فاصله وزنی تعمیم یافته: با حل معادله ایکونال، فاصله تعمیم یافته را روی چند ابر نقطه محاسبه می کنیم. شکل 7 را ببینید . ما نمودار را به صورت k -nn با k = 5ک=5، در فضای مختصات ابر نقطه. از آنجایی که مرحله گسسته سازی فضایی به اندازه کافی منظم است، از تابع وزن ثابت استفاده می کنیم ( w ( u ، v ) = 1�(تو،�)=1). خط قرمز بر روی شکل کوتاه ترین مسیر بین نقطه مبدا (نقطه ای که فاصله از آن محاسبه می شود) و نقطه دیگری در ابر نقطه است. این مسیر با استفاده از تابع فاصله محاسبه شده تغییر شکل داده شد. شکل 8 تکامل تخمین فاصله را روی یک مش از یک راس، با یا بدون محدودیت های رنگ سنجی نشان می دهد.
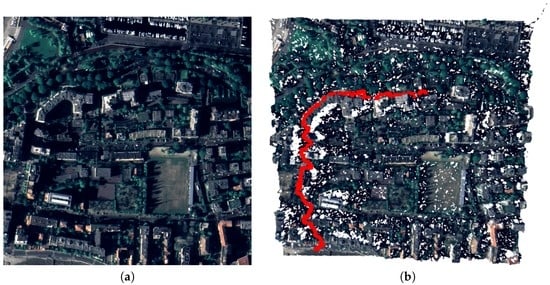
شکل 9 کوتاه ترین مسیر را بین دو نقطه از یک شهر سه بعدی نشان می دهد. این ابر نقطه سه بعدی اخیر از رابط وب آنلاین برای تخمین ابرهای نقطه رنگی به دست آمده از تصاویر ماهواره ای استریو [ 42 ] تولید شده است. کوتاه ترین مسیر با پردازش ابر نقطه خام به دست آمد. توجه داشته باشید که، حتی اگر ابر نقطه تخمین زده شده بسیار پر سر و صدا و یکنواخت نباشد، کوتاه ترین مسیر با اجتناب از ساختمان ها به جاده ها می رسد. نتیجه با به دست آمده است k = 10ک=10.
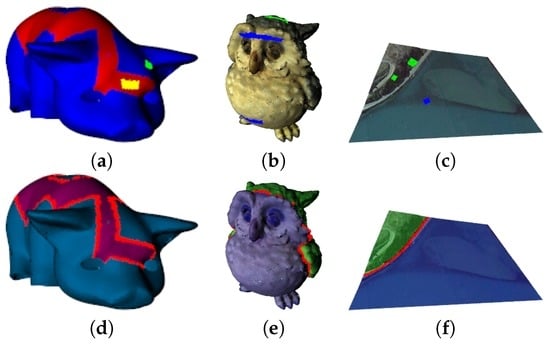
تقسیم بندی: شکل 10 تقسیم بندی یک ابر نقطه ای را از مقادیر رنگ سنجی نشان می دهد. در شکل 8 و شکل 10 ، تابع تشابه w از فاصله رنگ با w ( u ، v ) =ه− | | f( u ) –f( v ) | |2/σ2�(تو،�)=ه–||�(تو)–�(�)||2/�2و f: V→ آر�:�→آرتابع رنگ سنجی شکل 11 تقسیم بندی مش ها را از تخمین انحنای هندسی نشان می دهد. تابع شباهت با آن محاسبه می شود w ( u ، v ) =ه–( ک( u ) – K( v ) )2/σ2�(تو،�)=ه–(ک(تو)–ک(�))2/�2; و ک: V→ آرک:�→آرتابعی که تخمینی از مجذور انحنای اصلی را در هر رأس مرتبط می کند u ∈ Vتو∈�. تخمین انحنای اصلی با محاسبه مقادیر ویژه همانطور که در [ 43 ، 44 ] پیشنهاد شده است، به دست می آید.
5. نتیجه گیری ها
در این مقاله، ما چارچوب PdE را پذیرفتهایم، و بر روی برخی از عملگرهای مورفولوژیکی پیوسته مبتنی بر PDE در حوزههای اقلیدسی تمرکز کردهایم: اتساع/فرسایش، جریانهای انحنای متوسط و معادله Eikonal. ما کاربردهای آنها را برای پردازش ابرهای نقطه رنگی داده های سه بعدی ژئو انفورماتیک گسترش داده ایم. ما به طور خلاصه ساخت یک نمودار را از شبکه مش یا ابر نقطه ای ارائه کردیم و چندین مثال مانند بازیابی، حذف نویز، رنگ آمیزی، استخراج شی یا تخمین مسیر حداقل را نشان دادیم. ما نتایجی را روی دادههای جغرافیایی نشان دادهایم، مانند تخمین کوتاهترین مسیر در یک ابر نقطه خام یک شهر سه بعدی یا تقسیمبندی یک ابر نقطه سه بعدی LIDAR بر اساس مقادیر رنگسنجی. نتایج پتانسیل های زیادی از رویکرد ابر نقطه ای را برای پردازش داده های سه بعدی ژئو انفورماتیک نشان داد.







بدون نظر