1. معرفی
برآورد سرفصل یکی از مشکلات کلیدی در الگوریتم محاسبه مردگان عابر پیاده است و دقت تخمین جهت گیری تأثیر مستقیمی بر نتایج محاسبه موقعیت دارد. به دست آوردن اطلاعات دقیق از حسگرهای IMU با هزینه کم و دقت کم به عنوان یک مشکل دشوار در موقعیت یابی داخلی در نظر گرفته می شود [ 1 ، 2 ].
اساساً، انباشت خطای عنوان نقص ذاتی هر الگوریتم محاسبه مرده عابر پیاده (PDR) مبتنی بر MEMS IMU است که میتواند با IMU با دقت بالا کاهش یابد. با این حال، MEMS اغلب تنها انتخاب از منظر مصرف انرژی، قیمت، وزن و غیره است. راه حل های مختلفی توسط محققان برای کاهش خطای انباشته شده MEMS در طول موقعیت یابی ارائه شد. افضل و همکاران [ 3 ] از پلتفرم مغناطیسسنج چندگانه (MMP) برای حذف ناهنجاریهای مغناطیسی ناشی از دستگاههای الکترونیکی و مواد آهنی استفاده کرد و در نتیجه دادههای سرفصل قابل اعتمادی را به دست آورد. وانگ و همکاران [ 4 ] از فیلتر ذرات و روش کمک به نقشه استفاده کرد، در نتیجه دقت موقعیت یابی سطح متر را به دست آورد. ژانگو همکاران [ 5 ] دادههای بصری و اینرسی را یکپارچه کرد تا محلیسازی شود، دادههای بصری از دوربین تلفن همراه گرفته شد و از تطبیق تصویر برای دستیابی به موقعیتیابی استفاده شد. گوزنباوئر و همکاران [ 6 ] دادههای حرکت عابر پیاده را برای یادگیری ماشین جمعآوری کرد، به طوری که برای تجزیه و تحلیل راه رفتن و طول گام مربوطه، آزمایشها نشان داد که خطای انباشته تنها 2.76٪ پس از راه رفتن 233 متر بود. رابرتسون و همکاران [ 7] مدل حرکت عابر پیاده را از طریق بستن IMU به پای عابر پیاده برای تشخیص وضعیت حرکت IMU ایجاد کرد و برآورد و جبران خطای پارامترهای ناوبری و دستگاه را بر اساس EKF انجام داد تا دقت و ثبات موقعیتیابی را بهبود بخشد. الگوریتم
اگرچه اکثر روش های موجود ممکن است نتایج موقعیت یابی خوبی داشته باشند، اما به اطلاعات اضافی مانند میدان مغناطیسی و تصویر نیاز دارند که نه تنها می تواند به راحتی تحت تأثیر محیط خارجی قرار گیرد، بلکه مصرف برق و حجم سیستم را نیز افزایش می دهد. به عنوان مثال، اطلاعات اثر انگشت زمین مغناطیسی باید توسط یک تلفن همراه در شرایط موقعیت یابی از قبل جمع آوری شود و سپس برای موقعیت یابی استفاده شود. در همین حال، اکثر الگوریتم های موقعیت یابی نیاز به محاسبه داده های بزرگ دارند که فقط برای تجزیه و تحلیل پس از پردازش مناسب است، به عنوان مثال، الگوریتم های پردازش پس از تطبیق نقشه توسط فیلتر ذرات و غیره انجام می شود.
جهت گیری یک پیوند کلیدی در سیستم موقعیت یابی را تشکیل می دهد. تعدادی از روش های تخمین جهت گیری همجوشی بر اساس شتاب سنج، ژیروسکوپ و مغناطیس سنج توسعه یافته اند [ 8 ، 9 ، 10]]. این روش ها می توانند تا حدودی دقت جهت راه رفتن را بهبود بخشند، اما با انباشت زمان خطای جهت بیشتر می شود. در این مقاله، یک الگوریتم تصحیح جهت گیری بلادرنگ پیشنهاد شده است. جهت گیری پس از هر چرخش بر اساس فیلتر کالمن در محیط عادی ساختمان تجدید نظر خواهد شد. نقشه از قبل اندازه گیری می شود، نه اینکه بوسیله محلی سازی و نقشه برداری همزمان (SLAM) تولید شود. الگوریتم ما باید با این فرض استفاده شود که قبلاً یک نقشه داخلی دقیق به دست آمده است. مقایسه با برخی روشهای دیگر مبتنی بر محدودیت نقشه خالص [ 11]، این روش می تواند تغییرات جزئی در جهت راه رفتن عابر پیاده را با دقت بیشتری منعکس کند و در نتیجه به دقت موقعیت یابی بهتر در کاربرد الگوریتم PDR دست یابد. تجزیه و تحلیل دقیق و تحقیق در مورد این روش در زیر انجام شده است. اول از همه، یک مدل خطای عنوان یکپارچه برای خطاهای مختلف قطب نما مغناطیسی در کاربرد ناوبری عابر پیاده ایجاد شده است. از داده های ژیروسکوپ برای قضاوت در مورد حرکت خط مستقیم یا چرخش استفاده می شود. پنج پارامتر مدل خطای عنوان با ساخت اطلاعات هندسی به روش فیلتر کالمن محاسبه می شود. سپس، پنج پارامتر در مدل جایگزین میشوند تا خطای عنوان قابل پیشبینی قطبنما مغناطیسی را محاسبه کند، در نتیجه اطلاعات عنوان بلادرنگ پس از جبران خطا محاسبه میشود. آزمایشها نشان میدهد که روش پیشنهادی محاسبه جبران زمان واقعی میتواند به آموزش پارامترهای مدل خطای دقیق در محیط داخلی با ساختار منظم دست یابد، در اینجا ساختار منظم به تعدادی راهرو مستقیم در ساختار داخلی اشاره دارد. جهت حرکت در راهرو اساساً ثابت می ماند، به طوری که جهت راه رفتن می تواند با استفاده از جهت شناخته شده یک راهرو در معرض محدودیت فیلتر قرار گیرد. این روش به طور موثر اطلاعات عنوان اصلی را بهبود می بخشد، از اثر تجمع خطای موقعیت یابی جلوگیری می کند و نیازهای ناوبری عابر پیاده را در زمان واقعی برآورده می کند. جهت حرکت در راهرو اساساً ثابت می ماند، به طوری که جهت راه رفتن می تواند با استفاده از جهت شناخته شده یک راهرو در معرض محدودیت فیلتر قرار گیرد. این روش به طور موثر اطلاعات عنوان اصلی را بهبود می بخشد، از اثر تجمع خطای موقعیت یابی جلوگیری می کند و نیازهای ناوبری عابر پیاده را در زمان واقعی برآورده می کند. جهت حرکت در راهرو اساساً ثابت می ماند، به طوری که جهت راه رفتن می تواند با استفاده از جهت شناخته شده یک راهرو در معرض محدودیت فیلتر قرار گیرد. این روش به طور موثر اطلاعات عنوان اصلی را بهبود می بخشد، از اثر تجمع خطای موقعیت یابی جلوگیری می کند و نیازهای ناوبری عابر پیاده را در زمان واقعی برآورده می کند.
این مقاله به شرح زیر سازماندهی شده است: در بخش 2 ، فرآیند ساخت مدل خطای عنوان توضیح داده شده است. در بخش 3 ، یک الگوریتم جبران سرفصل بلادرنگ بر اساس فیلتر کالمن پیشنهاد شده است. در همین حال، الگوریتمهای تصحیح سرفصل بلادرنگ مبتنی بر کمک به اطلاعات هندسه ساختمان و حداقل مربعات، به منظور تسهیل تحلیل مقایسهای ارائه شدهاند. متعاقباً، چندین آزمایش در بخش 4 مورد تجزیه و تحلیل قرار می گیرد و بخش 5 مقاله را به پایان می رساند.
2. تجزیه و تحلیل خطا داده های سنجش جهت گیری
داده های قطب نما مغناطیسی احتمالاً تحت تأثیر عوامل زیادی مانند فعالیت های انسانی، مواد فضای داخلی و تجهیزات الکترونیکی محیطی قرار می گیرند. در حالت ایستا، قطب نمای مغناطیسی احتمال 90% دارد که خطای 15 درجه را ایجاد می کند [ 12].]. نقطه ضعف قطب نما مغناطیسی در این است که محور القای مغناطیسی هر میدان مغناطیسی تداخلی را که روی میدان ژئومغناطیسی قرار می گیرد، تشخیص می دهد. چنین تداخلی از خود محیط و پلتفرم ناشی می شود که می تواند خطاهای مختلفی ایجاد کند. این خطاها را می توان به دو دسته عمده خطای قابل پیش بینی و خطای غیر قابل پیش بینی تقسیم کرد. خطای قابل پیشبینی عمدتاً از رفتارهای حمل سکو و عابران پیاده مانند جلوه آهنی نرم یا سخت، شیب سکو، ناهماهنگی نصب و لرزش هنگام راه رفتن کاربر ناشی میشود. خطای غیرقابل پیش بینی عمدتاً از تداخل مغناطیسی در محیط به ویژه در محیط داخلی ناشی می شود. بسیاری از خطاهای قابل پیش بینی را می توان با فرآیند کالیبراسیون استاتیک و الگوریتم جبران پویا بلادرنگ حذف کرد. با این حال،
Literature [ 13 ] تجزیه و تحلیل دقیقی از تعریف، مدلسازی و ویژگیهای ضربه بر روی قرائتهای قطبنما مغناطیسی خطاهای مختلف قابل پیشبینی انجام داد، از جمله هفت نوع خطا مانند انحراف مغناطیسی، اثر آهن سخت و نرم، ضریب مقیاس، بایاس ثابت، شیب پلت فرم، نصب. ناهماهنگی و لرزش هنگام راه رفتن کاربر. در همین حال، روشهای مربوط به کاهش خطا برای هر خطای قابل پیشبینی ارائه شد.
انحراف مغناطیسی به معنای زاویه بین شمال مغناطیسی و قطب شمال جغرافیایی است که برای نزول به سمت شرق مثبت و برای نزول به سمت غرب منفی است. انحراف مغناطیسی مربوطه در مکان های مختلف یا زمان های مختلف در یک مکان متفاوت است. در بیشتر نقاط چین، انحراف مغناطیسی بین [-10، +2] درجه است. در کاربرد موقعیت یابی داخلی، انحراف ژئومغناطیسی با توجه به منطقه واقع شده، یک λ ثابت تنظیم شد ، که با آن انحراف ژئومغناطیسی Xuzhou در سال 2015 4 درجه و 35 دقیقه محاسبه شد.
اثر آهن سخت توسط آهنرباهای دائمی و اجسام مغناطیسی در مجاورت قطب نما مغناطیسی ایجاد می شود. به دلیل تغییر آهسته آن می توان آن را به عنوان یک جزء ثابت در یک زمان معین تقریب زد. این معادل آن است که یک جزء ثابت بر روی شار مغناطیسی در جهت قطب نما مغناطیسی قرار می گیرد. این نوع خطا معمولاً به عنوان یک سوگیری ثابت در نظر گرفته می شود سیب=(سیb x،سیb y, 0 )تی��=(���,���,0)�. به طور کلی، اثر آهن سخت باید با روش کالیبراسیون داخلی قطب نما از بین برود و اثر باقی مانده کمی پس از کالیبراسیون حفظ می شود.
اثر آهن نرم از تعامل بین میدان ژئومغناطیسی و مواد فرومغناطیسی اطراف قطب نما حاصل می شود. تفاوت با اثر آهن سخت در این است که میدان مغناطیسی ایجاد شده توسط اثر آهن نرم در جهات مختلف متفاوت است، که معادل آن است که یک میدان مغناطیسی متغیر بر میدان مغناطیسی قرار می گیرد. چنین خطای را می توان در ترکیب ضریب مقیاس و زاویه چرخش مدل کرد که به صورت زیر بیان می شود:
را آمن ج���اصطلاح به ضرایب موثر آهن نرم اشاره دارد. آنها ثابت تناسب بین میدان مغناطیسی اعمال شده به آهن نرم و میدان مغناطیسی ناشی از آن هستند.
خطاهای ضریب مقیاس و بایاس ثابت متعلق به خطای ابزار سنسور است که به دلیل ویژگی های مشابه به ترتیب به عنوان اثر آهن نرم و آهن سخت طبقه بندی شدند [ 14 ].
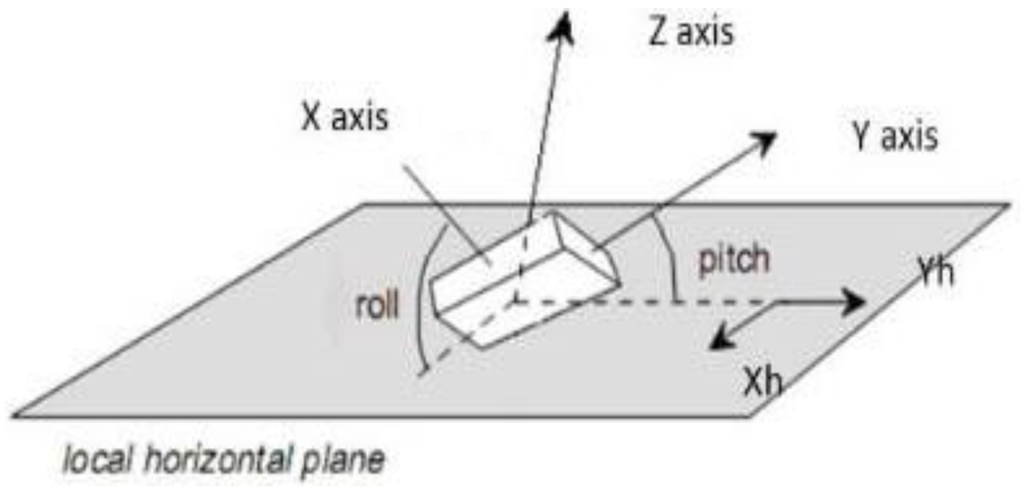
عنوان توسط قطب نما مغناطیسی از طریق اندازه گیری مولفه افقی میدان ژئومغناطیسی محاسبه می شود. هنگامی که سکو کج می شود، جزء عمودی میدان ژئومغناطیسی به محور القایی قطب نما پیش بینی می شود که باعث خطای انحراف بزرگ می شود. بنابراین، مدلسازی خطای شیب پلتفرم با هدف دستیابی به چرخش از سیستم مختصات افقی به سیستم مختصات پلت فرم است:
جایی که، φ�به زاویه گام پلت فرم اشاره دارد. θ�همانطور که در شکل 1 نشان داده شده است به زاویه رول پلت فرم اشاره دارد .
خطای عدم تراز نصب به انحراف در جهت رو به جلو سیستم مختصات وسیله نقلیه و جهت پیاده روی واقعی عابر پیاده در فرآیند نصب سیستم ناوبری اشاره دارد. چنین خطایی به عنوان یک ثابت مدلسازی میشود β�.
در نهایت، اجتناب و پیش بینی خطای لرزش عابر پیاده در حال حرکت دشوار است. در فرآیند حرکت، دستگاه به ناچار لرزش خاصی را همراه با لرزش بدن کاربر ارائه می دهد. با توجه به تصادفی بودن خطا، معمولاً به صورت مدلسازی میشود ω ~ ن( 0 ,σ2)�~�(0,�2)، که اندازه آن از σ2�2به سرعت حرکت عابر پیاده، عادات حرکتی و سایر خصوصیات مربوط می شود.
مدل سازی ترکیبی برای مدل های خطای فوق انجام شد. مقدار واقعی مشاهده شده مب=(مb x،مb y،مb z)تی ��=(���,���,���)�قطب نما مغناطیسی در سیستم مختصات خودرو را می توان به صورت [ 15 ] بیان کرد:
جایی که، مساعت �ℎبه بردار میدان ژئومغناطیسی محلی اشاره دارد. سیس ��به ضریب خطای اثر آهن نرم اشاره دارد. سیب ��به ضریب خطای اثر آهن سخت اشاره دارد. آربL���به ماتریس خطای شیب از سیستم مختصات افقی به سیستم مختصات خودرو اشاره دارد.
مدل های خطا به فرمول (3) جایگزین می شوند، در نتیجه بیان قرائت محور القایی قطب نما مغناطیسی به دست می آید. یک مدل یکپارچه حاوی تمام خطاهای قابل پیش بینی را می توان از طریق تبدیل فرمول به دست آورد. ادبیات [ 15 ] روش کالیبراسیون خطای پیچیده را بر اساس حوزه میدان مغناطیسی به عنوان حل پنج پارامتر بر اساس دامنه عنوان ساده کرد تا پیچیدگی الگوریتم را ساده کند. عبارت ساده شده زیر برای تعیین تقریبی خطای عنوان مشتق شده است که به صورت زیر تعریف می شود:
جایی که، δ�به انحراف در جهت اشاره دارد، ω�به نویز گاوس جهت راه رفتن اشاره دارد، ξ‘�′به مقدار عنوان خروجی از قطب نما مغناطیسی اشاره دارد. A ~ E نشان دهنده ضرایب مدلی است که باید کالیبره شود.
3. الگوریتم تصحیح سرفصل بلادرنگ
به منظور بررسی عملکرد الگوریتم جبران سرفصل بلادرنگ بر اساس فیلتر کالمن، الگوریتم های جبران سرفصل بلادرنگ بر اساس کمک با اطلاعات هندسه ساختمان و حداقل مربع برای تسهیل تحلیل مقایسه ای ارائه شده است.
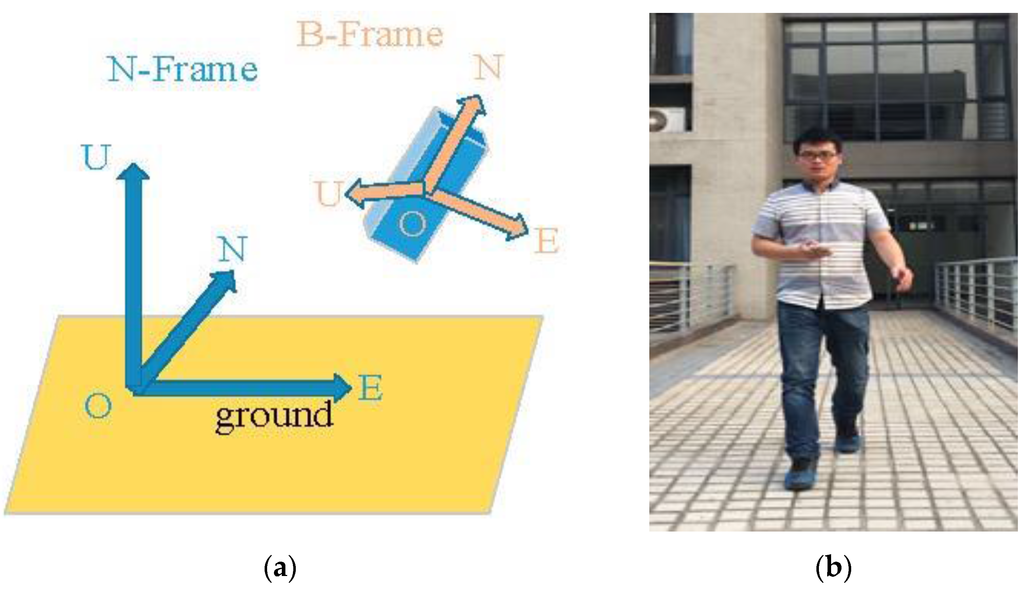
الگوریتم PDR عمدتاً از سه مرحله زیر تشکیل شده است: تشخیص راه رفتن، ارزیابی طول گام، محاسبه جهت. فرآیند به شرح زیر است: شتابهایی که از تلفن گرفته شده است، با استفاده از ماتریس چرخش، از کادر بدنه (B) به قاب ناوبری (N) تبدیل میشوند: یک ججنمن=آرB → N⋅ یک سیجبمن�����=��→�·����بهمانطور که در شکل 2 نشان داده شده است، سیستم مختصات تلفن همراه عابر پیاده B-frame و سیستم مختصات هواپیمای پیاده روی عابر پیاده، چارچوب ناوبری است. سپس، قدر شتاب سنج را محاسبه می کنیم: a c c _ m a g=a c cایکس2+ a c cY2+ a c cز2–––––––––––––––––––√آجج_مترآ�=آججایکس2+آجج�2+آججز2، که در آن accX ، accY و accZ شتاب سه محوره در قاب ناوبری پس از حذف تأثیر گرانش هستند. و سپس ارزش a c c _ m a gآجج_مترآ�به عنوان تشخیص راه رفتن استفاده می شود. الگوریتم فیلتر FIR [ 16 ] برای پیاده سازی روش تشخیص راه رفتن مبتنی بر فیلتر پایین گذر با توجه به قله ها و دره ها استفاده می شود. فرمول محاسبه طول مرحله است Lک= ک⋅یک ججm a x– یک ججm i n–––––––––––––√4�ک=ک·آججمترآایکس–آججمترمن�4[ 17 ]، جایی که Lک�کاست کتی ساعتکتیساعتطول گام ضریب K را می توان برای سبک های مختلف راه رفتن کالیبره کرد. یک ججm a xآججمترآایکسو یک ججm i nآججمترمن�حداقل و حداکثر دامنه شتاب هستند. جهت راه رفتن را می توان از طریق ترکیب مغناطیسی متر، شتاب سنج و ژیروسکوپ محاسبه کرد. در نهایت، عابران پیاده را می توان با فرمول (5) قرار داد،
در جایی که α زاویه سمت را نشان می دهد، SL به طول گام و ( X ، Y ) مختصات موقعیت را نشان می دهد.
3.1. تصحیح سرفصل به کمک نقشه
جهت راه رفتن عابر پیاده ممکن است از طریق ژیروسکوپ یا مغناطیس سنج در تلفن های همراه ما شناخته شود. با این حال، زاویه به دست آمده توسط ژیروسکوپ دارای خطای انباشته زیادی است و زاویه به دست آمده توسط مغناطیس سنج مستعد تداخل میدان های مغناطیسی خارجی است. با توجه به این موضوع، کانگ و همکاران. [ 8 ] یک روش موقعیت یابی در همجوشی وزنی ژیروسکوپ و مغناطیس سنج را به شرح زیر در فرمول (6) ارائه کرد:
در این فرمول، ساعتکساعتکو ساعتk − 1ساعتک–1مقدار جهت را در محاسبه همجوشی لحظه جاری و لحظه قبلی نشان می دهد. W وزن را نشان می دهد. دبلیوکدبلیوکنشان دهنده سرعت زاویه ای به دست آمده توسط ژیروسکوپ در لحظه فعلی است. ساعتm a g، کساعتمترآ�،کنشان دهنده مقدار جهت به دست آمده توسط مغناطیس سنج در لحظه جاری است. اگرچه محاسبه همجوشی دقت جهت را تا حدودی بهبود می بخشد، افزایش خطای جهت همچنان با گذشت زمان اجتناب ناپذیر است. از آنجایی که اطلاعات نقشه از قبل در هنگام انجام موقعیتیابی شناخته شده است، طبیعی است که عنوان را با استفاده از اطلاعات هندسه نقشه محدود کنیم.
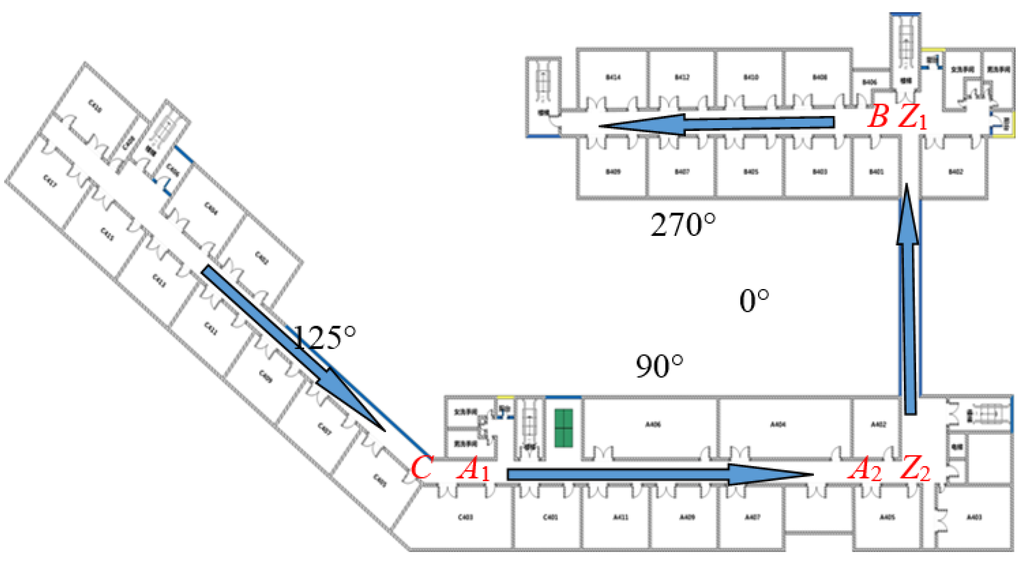
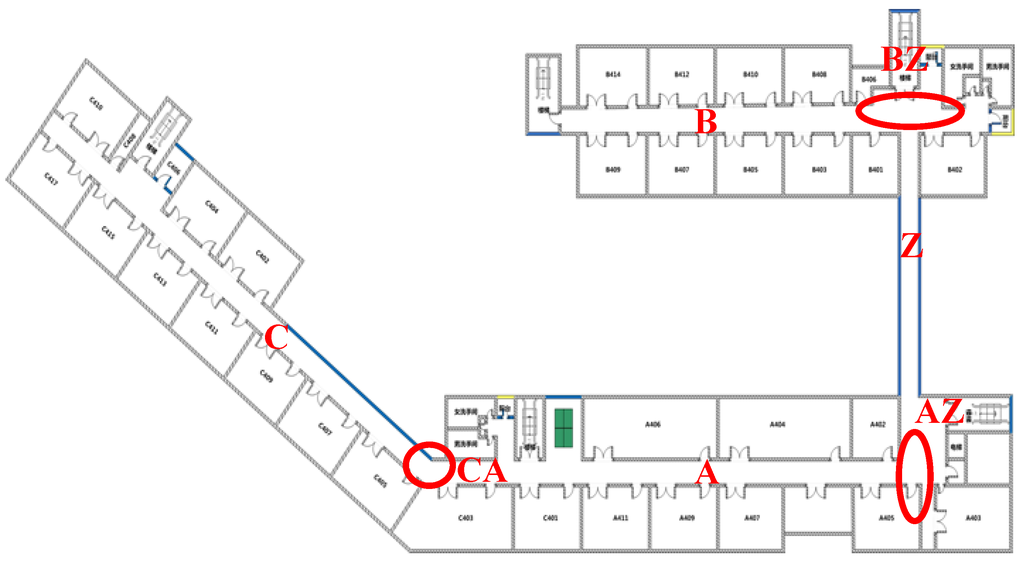
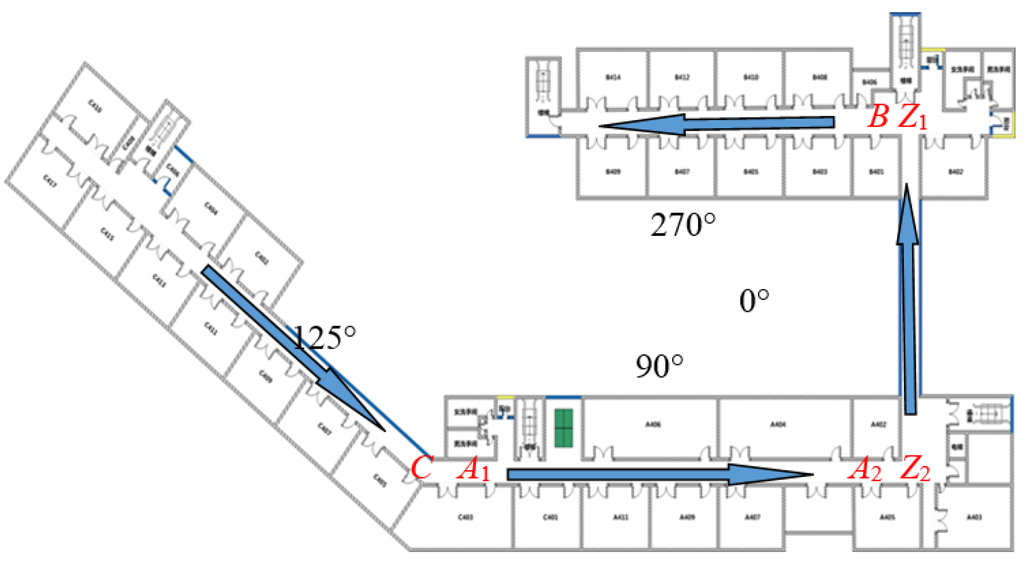
همانطور که در شکل 3 نشان داده شده است ، سه ناحیه مشخص شده با دایره های قرمز، مناطق غیر خطی، یعنی BZ، AZ و CA هستند. در چنین مناطقی، کاربران معمولاً به راه رفتن یا حرکت روی می آورند. در سه منطقه خطی با برچسب C، B و A در راهرو، کاربران معمولا در یک خط مستقیم راه می روند.
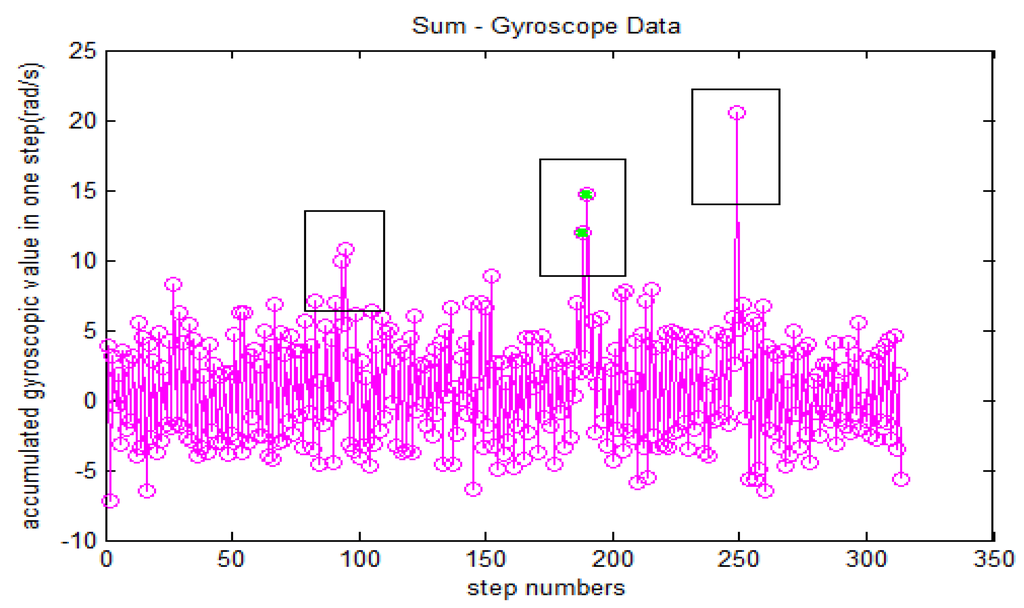
مقدار انباشته شده اسG yrاسجی��دادههای ژیروسکوپ برای قضاوت در مورد ویژگیهای حرکتی کاربرانی که در حال حرکت هستند، از جمله پیچیدن یک گوشه و راه رفتن در یک خط مستقیم استفاده میشود. شرط قضاوت برای پیچیدن یک گوشه این است:
اسG yrکاسجی��کو اسG yrk − 1اسجی��ک–1به مقادیر تجمعی ژیروسکوپ برای مرحله فعلی و مرحله قبلی به ترتیب مراجعه کنید. شکل 4 مقدار تجمعی ژیروسکوپ مربوط به هر مرحله در طول حرکت را نشان می دهد. همانطور که در شکل 5 نشان داده شده است، سه نقطه انتهایی درون جعبه های مستطیلی، سه حرکت چرخشی را نشان می دهند . بنابراین، زمانی که مقدار انباشته ژیروسکوپ با فرمول (7) مطابقت نداشته باشد، کاربر اساساً می تواند به عنوان راه رفتن در یک خط مستقیم شناسایی شود.
معمولاً سه مقدار شتاب شدید در راه رفتن وجود دارد که شامل دو فرورفتگی و یک قله است. مقدار جهت چنین راه رفتنی، مقدار جهت میانگین چنین سه مقدار شتاب شدید است. در حین تشخیص راه رفتن، مقدار افزودنی متغیرهای زاویه ژیروسکوپ میتواند برای تعیین ویژگیهای حرکتی کاربر (چرخش یا مستقیم) استفاده شود. اگر کاربر در ناحیه خطی (مانند C، A، B و Z) باشد، زاویه جهت ناحیه را می توان با توجه به خود انطباق داده های جهت تلفن همراه (مانند 125 درجه، 90 درجه، 0) تعیین کرد. درجه و 270 درجه)، و زاویه جهت هندسی به عنوان عنوان استفاده می شود. در غیر این صورت نشان می دهد که کاربر در منطقه غیر خطی (مانند CA، AZ و BZ) قرار دارد، میانگین جهت در راه رفتن کامل مستقیماً به عنوان زاویه سمت استفاده می شود.
3.2. تصحیح خطای عنوان بر اساس حداقل مربع
Literature [ 15 ] از داده های GPS در فضای باز برای حل پارامترهای مدل خطای عنوان به موجب حالت آموزش آنلاین استفاده کرد. با این حال، این روش مستلزم حضور کاربر در فضای باز است و سیستم ناوبری باید در منطقه باز راه اندازی شود تا مقدار مشاهده شده GPS خوب به دست آید، در غیر این صورت نمی توان پارامترهای مدل خطای نسبتاً دقیق را به دست آورد. با توجه به تصادفی بودن پذیرش سیستم ناوبری توسط کاربر، سیستم ناوبری داخلی را می توان آزادانه در محیط داخلی راه اندازی کرد. از آنجایی که اطلاعات هندسی ساختمان داخلی شناخته شده است، این مقاله روش جدیدی برای جبران سرفصل بلادرنگ بر اساس حداقل مربعات به موجب چنین اطلاعاتی ارائه میکند.
پنج پارامتر کالیبراسیون در فرمول (4) را می توان پس از به دست آوردن عنوان مرجع از اطلاعات هندسه نقشه و همچنین به دست آوردن داده های عنوان اصلی از قطب نمای مغناطیسی حل کرد. از نظر تئوری، پنج پارامتر کالیبراسیون در فرمول (4) تا زمانی که بیش از 5 مجموعه داده سرفصل به دست آمده باشد قابل حل هستند. در این مقاله، از 10 مجموعه داده سرفصل راه رفتن برای جستجوی پارامترهای مدل خطا در هر راه رفتن در یک خط مستقیم استفاده میشود و سپس پارامترهای مدل برای هر پیچیدن دوباره جستجو میشوند. روند حل به شرح زیر است:
فرض کنید که در فرآیند کالیبراسیون، عنوان اصلی قطب نما مغناطیسی این است: کجا ξمن‘�من“به مقدار جهت به دست آمده از سنسور برای هر بار اشاره دارد. مخصوص PDR، به مقدار جهت هر مرحله به دست آمده از سنسور اشاره دارد.
عنوان مرجع مربوطه عبارت است از:
مخصوص PDR، ξمن�منبه مقدار جهت مرجع هر پله اشاره دارد و به مقدار جهت راهرو مربوطه واقعی در این آزمایش اشاره دارد.
این پارامترها را می توان با فرمول زیر تعیین کرد:
جایی که
پس از اتمام کالیبراسیون، خطای عنوان بلادرنگ را می توان تخمین زد و حذف کرد. با این حال، باقیمانده های تخمین زده شده بیشتر از صدای گاوس ناشی از لرزش عابر پیاده به دست می آیند، که می تواند با فیلتر کالمن و غیره کاهش یابد، یعنی روش پیشنهاد شده در بخش 3.3 .
3.3. جبران زمان واقعی سرفصل بر اساس فیلتر کالمن
مشابه اصل جبران سرفصل شرح داده شده در بخش 3.2 ، این بخش نوعی روش تخمین سرفصل را بر اساس جبران زمان واقعی فیلتر کالمن پیشنهاد می کند. این روش فیلتر کالمن را با در نظر گرفتن ضرایب ( A , B , C , D , E ) در مدل خطای عنوان (4) به عنوان متغیرهای حالت سیستم و در نظر گرفتن مقدار خطای عنوان به عنوان بردار اندازه گیری شده سیستم و هدایت واقعی طراحی می کند. -تخمین زمانی خطای عنوان بر اساس تجزیه و تحلیل فوق، دوره کامل جبران خطای سرفصل بلادرنگ بر اساس الگوریتم فیلتر کالمن در پیوست آورده شده است .
چندین متغیر کلیدی فیلتر کالمن به شرح زیر طراحی شده است، بردار حالت به عنوان پنج ضریب کالیبراسیون در فرمول (4) تعریف شده است:
معادله حالت به صورت زیر تعریف می شود:
بردار اندازه گیری به صورت زیر تعریف می شود:
FPH نشان دهنده عنوان واقعی به دست آمده از جهت هندسی ساختمان است و OriH مقدار عنوان اصلی است که از خواندن تلفن همراه بدست می آید . ضریب بردار حالت به صورت زیر تعریف می شود:
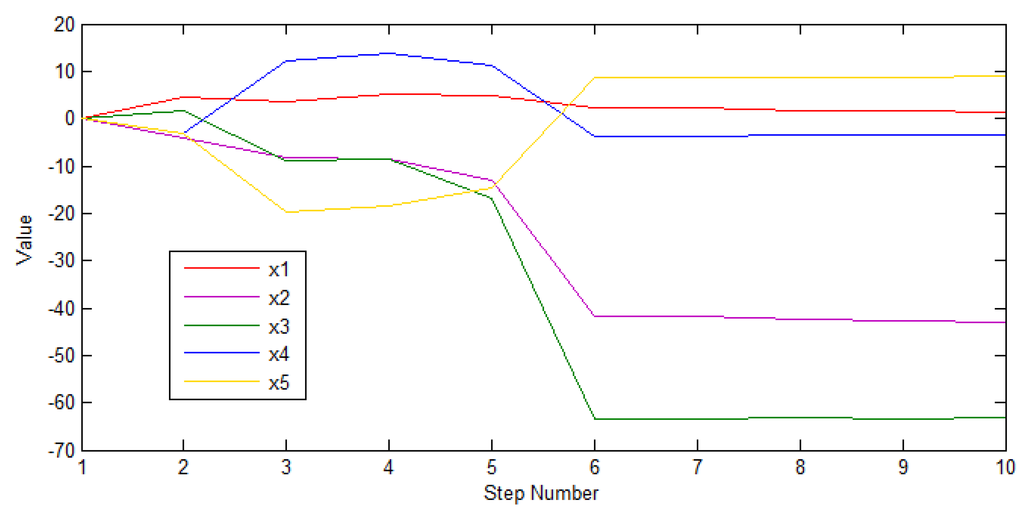
در واقع، H ماتریس استخراج است. انتخاب بردار حالت اولیه: ایکس0=[ 0 , 0 , 0 , 0 , 0 ]تیایکس0=[0،0،0،0،0]تی; ماتریس واریانس تخمین بردار حالت P به عنوان ماتریس مورب با مقدار عناصر قطری 1000 تنظیم شده است. ماتریس نویز پویا Q به عنوان ماتریس مورب با مقدار عناصر مورب 0.0001 تنظیم شده است. ماتریس نویز اندازه گیری R به عنوان ماتریس مورب با مقدار عناصر قطری 0.0001 تنظیم شده است. اساساً، آموزش داده های 10 تا 15 راه رفتن اول برای حرکت خط مستقیم، الزامات همگرایی را برآورده می کند.
P بر اساس تجربه تنظیم می شود. به طور کلی مقدار زیادی تنظیم می شود تا همگرایی الگوریتم را تضمین کند. در این مقاله، ماتریسی با مقدار اولیه 1000 برای عناصر قطری 5×5 تنظیم شده است. همانطور که از شکل 6 مشاهده می شود ، مقدار عنصر مورب P به سرعت کاهش می یابد و سپس برای 5 مرحله اول تمایل به پایداری دارد. مطابق با عناصر بردار حالت X در شکل 7 است ، یعنی تغییر بین دو حالت مجاور پس از 5 مرحله نسبتاً کم است.
4. آزمایش کنید
یک میدان آزمایشی در طبقه چهارم ساختمان دانشکده علوم محیطی و انفورماتیک فضایی (SESSI) در دانشگاه معدن و فناوری چین (CUMT) با انتخاب Samsung Galaxy Note3 به عنوان دستگاه تست تلفن همراه ساخته شده است. IMU داخلی این گوشی MPU 6050 است که شامل شتاب سنج 3 محوره، ژیروسکوپ و مغناطیس سنج است. فرکانس نمونه برداری آن 100 هرتز است. در آزمایش، یک عابر پیاده از غربی ترین منطقه C به منطقه B با عبور از منطقه A با سرعت ثابت راه می رود. در فرآیند راه رفتن، عابر پیاده تلفن همراه خود را به طور پیوسته در سطح نگه می دارد و در مجموع 314 پله را طی می کند.
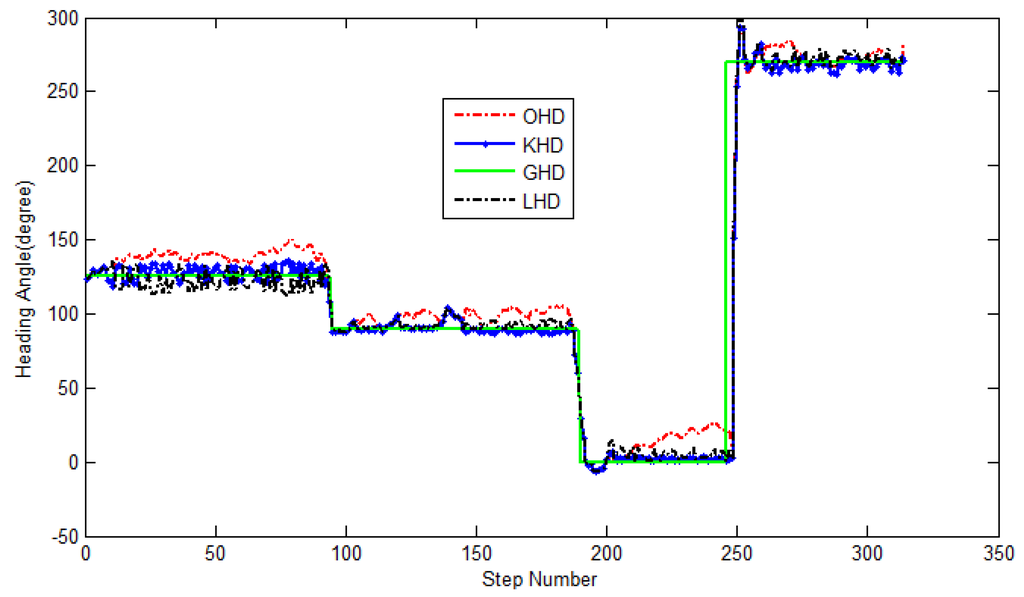
چهار روش محاسبه جهت مقایسه می شوند: در روش اول، مقدار جهت توسط حسگر جهت اصلی تلفن همراه به دست می آید که به عنوان OHD نشان داده می شود. در روش دوم، خطای جهت با تطبیق نقشه محدود می شود که به عنوان GHD نشان داده می شود. در روش سوم، جبران زمان واقعی برای خطای جهت بر اساس الگوریتم حداقل مربعات، که به عنوان LHD نشان داده می شود، ساخته می شود. در روش چهارم، جبران بلادرنگ خطای جهت بر اساس الگوریتم فیلتر کالمن که با KHD نشان داده می شود، انجام می شود.
4.1. تجزیه و تحلیل خطای عنوان
عابر پیاده در امتداد راهرو مشخص شده با فلش در شکل 5 از غربی ترین منطقه C در طبقه چهارم ساختمان SESSI قدم می زند. با توجه به جهت جغرافیایی، زاویه سمت از 125 درجه به 90 درجه و سپس از 90 درجه به 0 درجه و سپس از 0 درجه به 270 درجه می چرخد.
شکل 8 نتایج محاسبه سرفصل الگوریتم های مختلف را نشان می دهد. جدول 1 بیشتر اطلاعات خطای عنوان الگوریتم های مختلف را فهرست می کند. تجزیه و تحلیل مستقل برای عنوان چهار خط مستقیم انجام شده است و جدول 1 نشان می دهد که: میانگین خطای الگوریتم KHD به ترتیب 36.3، 15.7، 16.9 درصد و 57.8 درصد خطای OHD است. حداکثر خطای عنوان به ترتیب 30.7٪، 23.7٪، 20.8٪ و 88.9٪ خطای OHD است و حداقل خطای مطلق در 0.3 درجه است. خطای زاویه الگوریتم LHD بین خطای KHD و OHD است.
4.2. تجزیه و تحلیل مسیر موقعیت یابی مبتنی بر PDR
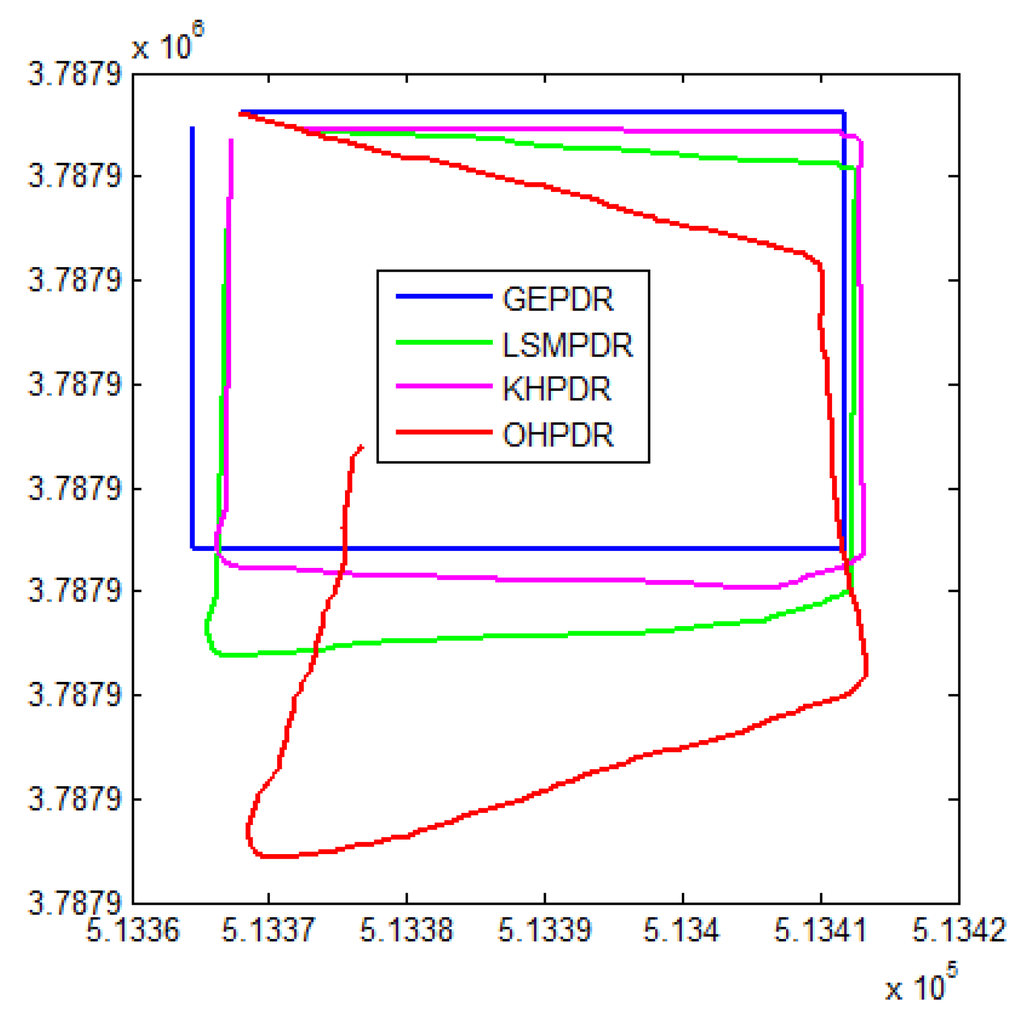
چهار الگوریتم PDR، یعنی OHPDR، LSMPDR، KHPDR و GEPDR به ترتیب با توجه به چهار جهت پیشنهادی OHD، LHD، KHD و GHD تعریف شدند.
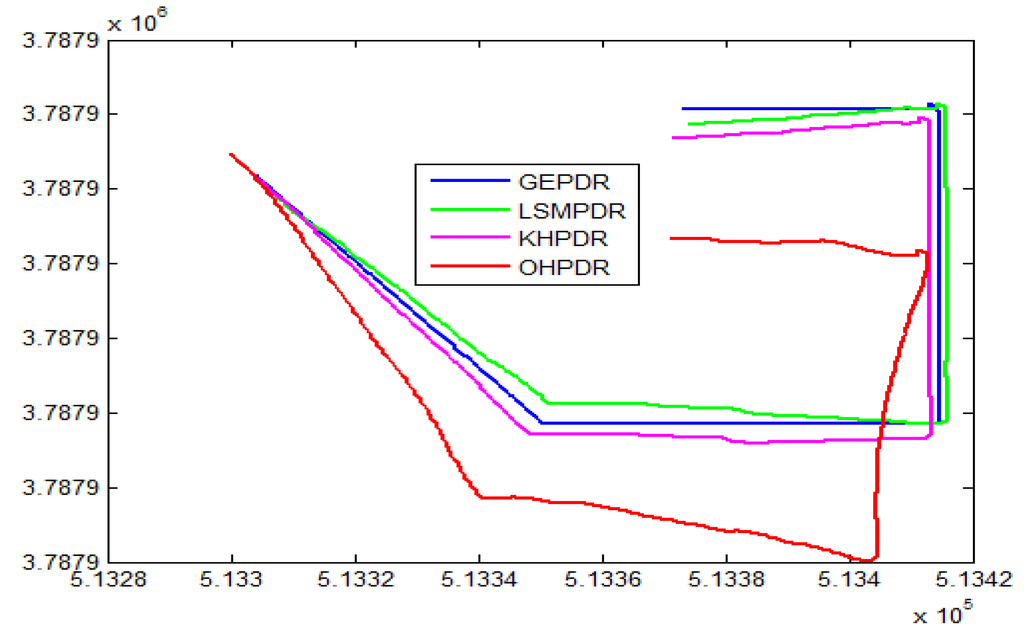
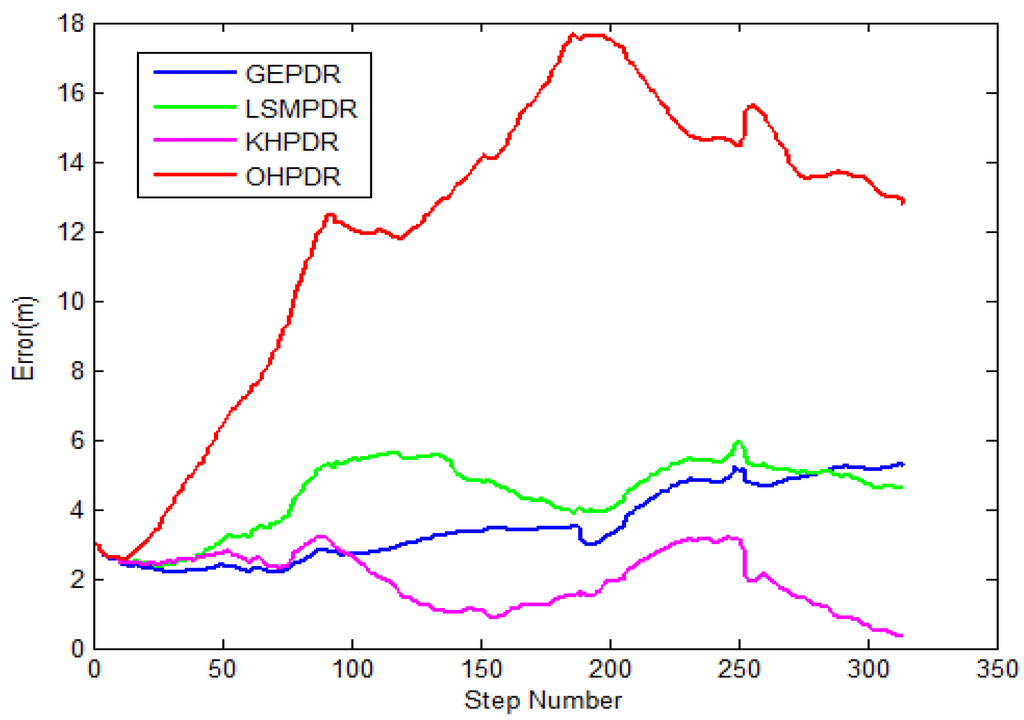
مسیر راه رفتن از پیش تعیین شده به عنوان Ground True مشخص می شود، و موقعیت شروع با خطای حدود 2 متر تنظیم می شود که با نتایج موقعیت WIFI از موقعیت واقعی تعیین می شود. شکل 9 مسیر محاسباتی چهار راه حل را نشان می دهد. شکل 10 و جدول 2 خطاهای موقعیت یابی ناشی از چهار راه حل فوق را نشان می دهد.
همانطور که در شکل 9 نشان داده شده است، مسیر OHPDR به رنگ قرمز است . در محدوده 200 قدم اول یا بیشتر، خطا از 2.56 متر اولیه تا 22.67 متر انباشته شده است. پس از آن، خطا کمی کاهش می یابد، اما میانگین خطا به 12.03 متر می رسد. به دلیل خطای عنوان، این راه حل به طور کامل از مسیر واقعی منحرف می شود.
مسیر GEPDR به رنگ آبی است. مقدار جهت راه رفتن با چهار جهت شناخته شده به طور خودکار مطابق با روش کوچکترین تفاوت مطابقت داده می شود، درست مانند این آزمایش (مانند 125 درجه، 90 درجه، 80 درجه و 270 درجه). مسیر بهدستآمده از این رویکرد تقریباً با هندسه راهرو مطابقت دارد، اما محدودیتهای جهت اجباری ممکن است مسیر راه رفتن را در یک کل یا حتی “از طریق دیوار” متفاوت کند. در این آزمایش، میانگین خطای موقعیت یابی روش 3.52 متر است.
مسیر LSMPDR به رنگ سبز است. این روش ده مرحله اول در هر راه رفتن مستقیم را به عنوان داده های آموزش جهت اتخاذ می کند و از الگوریتم حداقل مربعات برای حل خطا و جبران بلادرنگ استفاده می کند. در آزمایش، میانگین خطای موقعیت یابی این روش 4 متر و حداکثر خطای آن تنها 97/5 متر است که نشان می دهد این روش تا حدودی خطای تجمعی را کاهش می دهد.
مسیر KHPDR به رنگ صورتی است. نتیجه موقعیت یابی این روش بهترین نتیجه در بین چهار روش است. میانگین خطای موقعیت یابی در حدود 2 متر کنترل می شود و با افزایش زمان موقعیت یابی به شدت تغییر نمی کند. در مقایسه با سه روش دیگر، این روش به طور قابل توجهی خطا در مقدار میانگین، مقدار حداقل و مقدار حداکثر را کاهش می دهد که 80.7٪، 34.5٪ و 47.8٪ کاهش می یابد. 87.5%، 85.1% و 86.3%; 83.1 درصد، 27.3 درصد و 35.6 درصد.
4.3. تجزیه و تحلیل جامع خطا بر اساس چهار الگوریتم PDR.
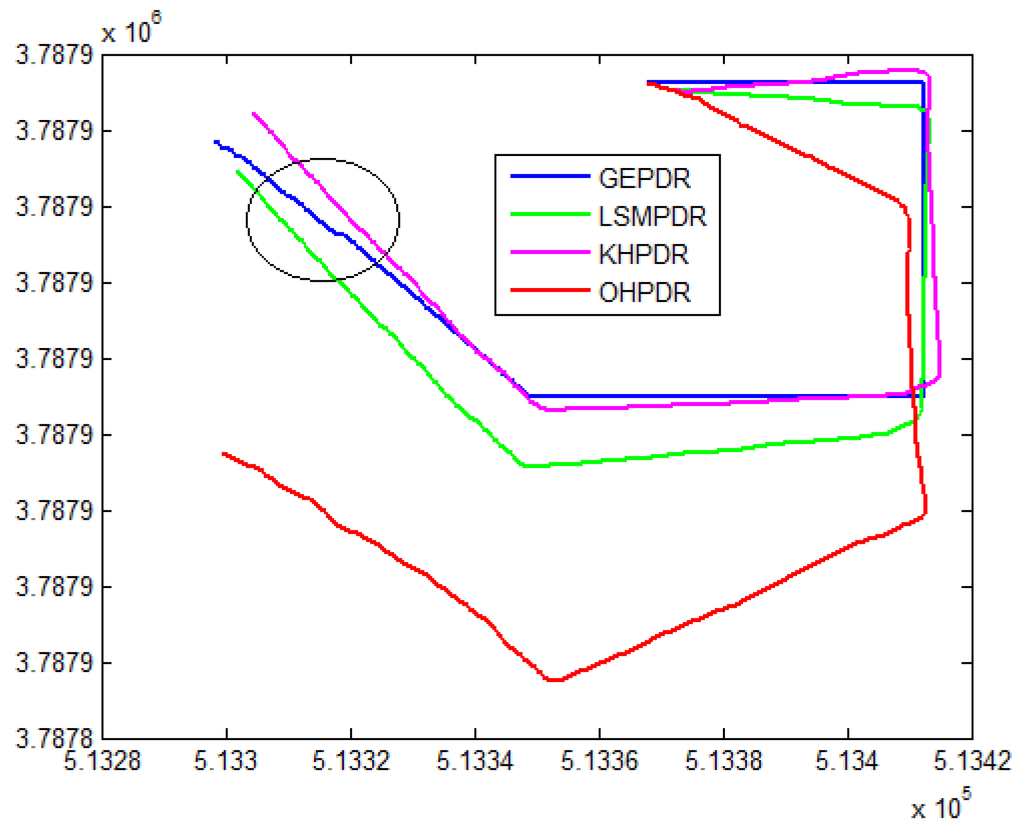
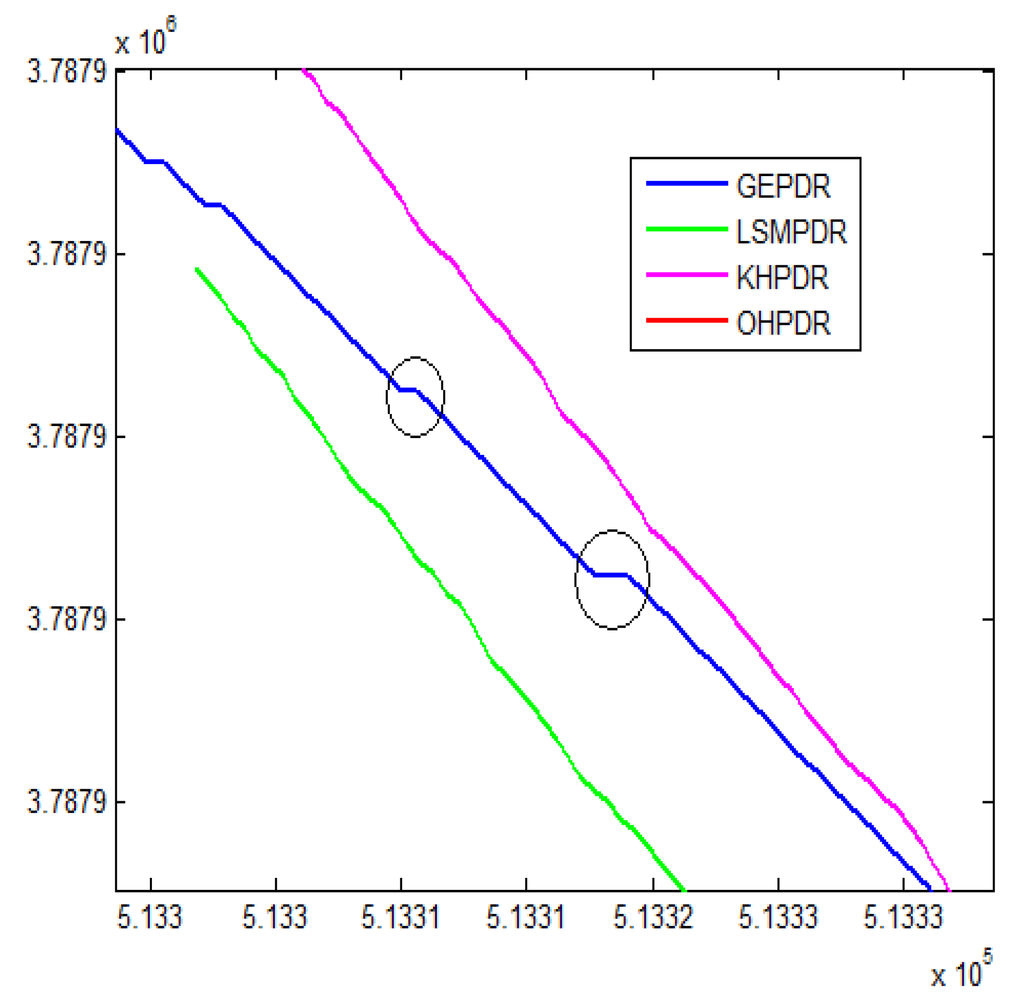
تجزیه و تحلیل خطای جامع در منطقه C-B، منطقه BC در طبقه 5 و یک منطقه راهرو مستطیلی در طبقه 3 انجام شد. 4 پسر و 2 زن در این آزمایش شرکت کردند. میانگین سنی 23 سال است. دو نر قد حدود 1.80 متر و برای دو نر دیگر حدود 1.75 متر دارند. یک ماده قد 1.62 متر و دیگری 1.58 متر قد دارد. در هر منطقه آزمایشی، هر فرد به طور متوسط دو بار پیاده روی کرد. همه افراد تلفن همراه را به صورت افقی در دست داشتند و با راه رفتن عادی راه می رفتند. سه پیچ به راست آشکار از منطقه B به C، سه پیچ آشکار به چپ از منطقه C به B، و سه پیچ به راست با زوایای راست در مسیر در طبقه سوم وجود داشت. انحراف استاندارد خطای موقعیتیابی و ریشه میانگین انحراف مربع نتایج موقعیتیابی ثبت شد.شکل 11 ، شکل 12 و شکل 13 یک مسیر راه رفتن را نشان می دهد.
از جدول 3 ، جدول 4 و جدول 5 ، می بینیم که روش KFPDR به طور کلی بالاترین دقت را دارد. در مورد روش GHPDR که با دقت KFPDR دنبال می شود، دو نکته قابل توجه است:
(1) هنگامی که جهت به جهت هندسی ثابت می شود، خود خطای خاصی را به همراه خواهد داشت، زیرا جهت واقعی راه رفتن فقط به جهت هندسی نزدیک است، به طوری که این خطا پس از تجمع برای مدت طولانی تقویت می شود.
(2) هنگامی که خطای جهت راه رفتن اصلی خیلی بزرگ است (دایره های شکل 11 را ببینید )، محدودیت هندسی مستقیماً جهت گام را به سمت چپ افقی محدود می کند (برای جزئیات به دایره های شکل 12 مراجعه کنید )، که منجر به انحراف در کل می شود. مسیر و افزایش خطای موقعیت.
برای روش LSMPDR، این یک نوع بهینه سازی جهانی است، بدون در نظر گرفتن همبستگی بین داده های مجاور. این دقیقاً مزایای روش فیلتر کالمن است. بنابراین، دقت موقعیت یابی تنها بالاتر از الگوریتم OHPDR است.
علاوه بر این، آزمایش جدیدی به منظور بررسی اثربخشی الگوریتم انجام شد، یعنی چرخاندن دایره ای در گوشه با زاویه قائمه در ناحیه آزمایشی مستطیلی در طبقه سوم و سپس ادامه حرکت به جلو. نتایج تجربی در شکل 14 نشان داده شده است :
همانطور که در شکل 14 نشان داده شده است، مسیر الگوریتم OHPDR دارای حداکثر انحراف از مقدار واقعی است زیرا هیچ بهینه سازی در جهت انجام نشده است. الگوریتم GEPDR مسیر نسبتاً همواری داشت، اما انحراف کل زیادی داشت. به خصوص در گوشه، دایره واقعی به یک مستطیل کوچک بسته شده بود. الگوریتم KHPDR نزدیکترین الگوریتم به مسیر واقعی و الگوریتم LSMPDR در الگوریتم KHPDR کمی پایینتر بود.
5. نتیجه گیری ها
روش پیشنهادی در این مقاله دادههای عنوان راه رفتن را تحت راه رفتن در یک خط مستقیم به عنوان دادههای اساسی مورد استفاده برای آموزش پارامترهای مدل خطا میگیرد. برای هر چرخش، هنگام شروع مجدد راه رفتن در یک خط مستقیم، پارامترها مجدداً آموزش داده می شوند تا دقت تخمین سرفصل را بهبود بخشند و همچنین خطای عنوان را به خوبی کنترل کنند. به دلیل عملکرد یادگیری مداوم آن، دقت تخمین عنوان را می توان بهبود بخشید و اثر تجمع خطای موقعیت یابی PDR را می توان به طور موثر مهار کرد. روش پیشنهادی در این مقاله برای فضای باز نیز قابل استفاده است. در مورد نقشه شناخته شده می توان از مسیرهای مستقیمی که جهت آنها در نقشه مشخص شده است برای محدود کردن جهت استفاده کرد. اگر کاربر مانند زیگزاگ راه می رود، این الگوریتم نمی تواند محدودیت ها را با استفاده از جهت هندسی ساختمان درک کند. پارامترهای مدل خطا را می توان با استفاده از الگوریتم فیلتر کالمن فقط در صورتی محاسبه کرد که 10 گام متوالی جهت راه رفتن ثابت نگه داشته شود که می توان از آن برای محاسبه خطای عنوان و انجام جبران در زمان واقعی برای عنوان استفاده کرد. پارامترهای مدل خطا را می توان دوباره محاسبه کرد تا زمانی که چرخش بعدی و مقادیر جهت پایدار ده مرحله یک بار دیگر بدست آید. جهت گیری های تحقیقاتی آینده را می توان از سه جنبه زیر انجام داد: که می تواند برای محاسبه خطای عنوان و انجام جبران زمان واقعی برای عنوان استفاده شود. پارامترهای مدل خطا را می توان دوباره محاسبه کرد تا زمانی که چرخش بعدی و مقادیر جهت پایدار ده مرحله یک بار دیگر بدست آید. جهت گیری های تحقیقاتی آینده را می توان از سه جنبه زیر انجام داد: که می تواند برای محاسبه خطای عنوان و انجام جبران زمان واقعی برای عنوان استفاده شود. پارامترهای مدل خطا را می توان دوباره محاسبه کرد تا زمانی که چرخش بعدی و مقادیر جهت پایدار ده مرحله یک بار دیگر بدست آید. جهت گیری های تحقیقاتی آینده را می توان از سه جنبه زیر انجام داد:
(1) قرار گرفتن در جیب یا کیسه یکی از علایق تحقیقاتی ما در آینده است که به روش پیچیده تر تبدیل جهت و طول قدم و روش شناسایی راه رفتن پایدارتر نیاز دارد. در حال حاضر، ثبات افقی باید در اسرع وقت حفظ شود.
(2) فیلتر جهت فعلی فرض می کند که کاربران پس از چرخش در امتداد خط مستقیم به جلو حرکت می کنند و محدودیت ها توسط جهت هندسی شناخته شده ساختمان هدایت می شوند. کار بیشتر باید حرکت تصادفی کاربران را در نظر بگیرد و وضعیت حرکت را از طریق الگوریتم تشخیص دهد که محدودیت جهت آن انجام نمی شود. محاسبه فیلتر جهت باید دوباره زمانی انجام شود که جهت راه رفتن مجدداً با جهت هندسی ساختمان مطابقت داشته باشد.
(3) محدودیتها را میتوان با استفاده از راهروهای مستقیم انجام داد، بنابراین محدودیتهای طرفهای منحنی را نیز میتوان مورد مطالعه قرار داد، مانند تونل منحنی و جاده منحنی، که نیاز به انجام مطالعات بیشتر در مورد فناوری برداری نقشه دارد.





بدون نظر