

چکیده
جنبههای کیفی OpenStreetMap (OSM)، بهعنوان نمایش جهانی نقشهبرداری با منبع جمعیت، همیشه دغدغه اصلی دانشگاهیان بوده است. در حالی که روشهای بررسی کیفیت آن در برابر نقشههای ملی توسط تعدادی از مطالعات پیادهسازی شدهاند، کمترین کار در مورد چگونگی بهبود عملی کیفیت OSM برای تبدیل شدن به یک منبع نقشه معتبر وجود دارد. این مقاله روشی را برای تلفیق ویژگی های جاده، یعنی نام و کد مرجع، OSM با داده های باز ارائه شده توسط Ordnance Survey (آژانس نقشه برداری ملی بریتانیا) ارائه می دهد. ارزشهای افزوده شده در روش پیشنهادی شامل بهروزرسانی روزانه و ارائه نقشههای ترکیبی از طریق خدمات وب باز است. مهمتر از همه، اصلاح OSM crowd با برجسته کردن مکرر و ارائه وب به تفاوت های فردی تسهیل می شود. در حال حاضر بیش از 5800 تفاوت در تطبیق نام جاده ها و مراجع بین دو مجموعه داده وجود دارد. علاوه بر توصیف روش ادغام، الگوهای توزیع جغرافیایی مختلف تفاوت های شناسایی شده مورد بحث قرار می گیرد. اثر منفی تراکم جاده بر نسبت ویژگیهای ناهماهنگ بین دو مجموعه داده قابل مشاهده است که با توزیع جغرافیایی متفاوت آنها بر روی نقشه مشهود است. نشان داده شده است که بهترین تطابق بین ویژگی ها در مناطق بسیار متراکم، به دنبال آن مناطق با تراکم بسیار کم و در نهایت در شهرهای با اندازه متوسط تا بزرگ وجود دارد. الگوهای توزیع جغرافیایی مختلف تفاوت های شناسایی شده مورد بحث قرار می گیرد. اثر منفی تراکم جاده بر نسبت ویژگیهای ناهماهنگ بین دو مجموعه داده قابل مشاهده است که با توزیع جغرافیایی متفاوت آنها بر روی نقشه مشهود است. نشان داده شده است که بهترین تطابق بین ویژگی ها در مناطق بسیار متراکم، به دنبال آن مناطق با تراکم بسیار کم و در نهایت در شهرهای با اندازه متوسط تا بزرگ وجود دارد. الگوهای توزیع جغرافیایی مختلف تفاوت های شناسایی شده مورد بحث قرار می گیرد. اثر منفی تراکم جاده بر نسبت ویژگیهای ناهماهنگ بین دو مجموعه داده قابل مشاهده است که با توزیع جغرافیایی متفاوت آنها بر روی نقشه مشهود است. نشان داده شده است که بهترین تطابق بین ویژگی ها در مناطق بسیار متراکم، به دنبال آن مناطق با تراکم بسیار کم و در نهایت در شهرهای با اندازه متوسط تا بزرگ وجود دارد.
کلید واژه ها:
OpenStreetMap ; نقشه های ملی ; شبکه جاده ای ؛ ادغام
1. مقدمه
اعتماد به مجموعه داده های جغرافیایی مبتنی بر احساس قدرت و اعتقاد به دقیق بودن داده ها است. همانطور که علاقه و استفاده از OpenStreetMap (OSM) گسترش یافته است، بحث در مورد دقت و تناسب OSM برای هدف بیشتر بر دقت هندسی و کامل بودن شبکههای جادهای متمرکز شده است تا کیفیت اسناد. انتشار OpenData سیستم عامل در بریتانیا یک مجموعه داده مرجع باز ارائه کرده است که می توان نسبت OSM را بر اساس آن کالیبره کرد و متعاقباً برای تولید یک مجموعه داده بالقوه کامل تر و دقیق تر افزایش داد. در حالی که محتوای موضوعی منحصربفرد OSM را حفظ می کند، داده ها از محصولات OpenData آژانس ملی نقشه برداری اعتباری به ارث می برند.
این محصول پیشرفته OSM (در دسترس به عنوان داده خام یا به عنوان خدمات وب OGC) یکی از خروجی های پروژه OSM-GB [ 1 ] در موسسه ژئوفضایی ناتینگهام بوده است. یکی از اهداف اصلی این پروژه شناسایی بهبودهای کیفیت برای OSM و تشویق به ادغام آنها در مجموعه داده اصلی OSM است. روش شناسی این تحقیق بخشی جدایی ناپذیر از توسعه پروژه OSM-GB را تشکیل می دهد که هدف آن ارتقای قابلیت استفاده بالقوه OSM در زمینه های معتبر از طریق قابل اعتمادتر کردن OSM برای متخصصان است. معماری OSM-GB برای انجام وظایف زیر طراحی شده است:
- (آ)
-
ساخت آینه محلی OSM که روزانه به روز می شود
- (ب)
-
ارائه محتویات OSM (رستر و برداری) از طریق خدمات وب استاندارد
- (ج)
-
بررسی کیفیت داده ها با شناسایی خطاهای قابل تشخیص خودکار و مبتنی بر مرجع در “موتور مبتنی بر قانون/عمل”
- (د)
-
رفع خطاهای موجود در آینه OSM محلی تا آنجا که ممکن است
- (ه)
-
تجسم و ارائه نتایج بررسی کیفیت فردی از طریق خدمات وب استاندارد به منظور اصلاح خطاهای واقعی توسط جامعه.
در این مقاله تجزیه و تحلیل ما بر اساس ادغام شبکه جاده OpenData سیستم عامل به OSM برای افزایش اعتبار OSM است. با این حال، روش مشابهی را می توان در جهت مخالف به کار برد تا به طور بالقوه یک مجموعه داده معتبر را با برخی از محتوای موضوعی غنی (مسیرها، مسیرهای چرخه، نقاط مورد علاقه، ردپای ساختمان و انتساب دقیق) از OSM برای ایجاد مجموعه داده های جدید ترکیبی از منابع معتبر و جمعی استفاده کرد. داده ها.
2. پس زمینه
در این بخش ویژگی های دو مجموعه داده منبع به اختصار بررسی می شود. این بررسی برای طراحی سناریوی تلفیق و روش شناسی در بخش های بعدی استفاده خواهد شد.
2.1. OpenStreetMap
OpenStreetMap یک پروژه نقشه برداری مشترک جهان است. کاربران می توانند آزادانه هر منطقه از جهان را به روش وب 2.0 نقشه برداری کنند و نقشه های حاصل فوراً برای دسترسی عمومی رایگان در سراسر جهان در دسترس قرار می گیرند. کاربران با استفاده از ردیابی GPS، تصاویر هوایی یا دانش محلی خود، جهان را نقشه برداری می کنند. علاوه بر این، استفاده نامحدود از جفتهای کلید-مقدار برای برچسبگذاری تمام ویژگیها، وسیلهای عالی از حاشیهنویسیهای سفارشیشده را فراهم میکند که رویکردی مناسب برای برنامههای موضوعی است. OSM که در سال 2004 به عنوان یک پروژه و در سال 2006 به عنوان یک بنیاد آغاز شد، تاکنون بیش از یک میلیون کاربر را جذب کرده است [ 2 ]. نرخ رشد سالانه OSM در سراسر جهان (بر اساس تعداد نقطه، خطوط و چند ضلعی) تقریباً 75٪ در سال 2011 بود [ 3 ].
سادگی ساختار داده OSM از رویکرد یکپارچه آن برای مدلسازی ویژگیهای جغرافیایی و همچنین مستقل از وضوح سرچشمه میگیرد. ویژگی ها به گره ها، راه ها و روابط تقسیم می شوند. گره هر ویژگی تک بعدی مانند امکانات عمومی یا راس جاده است. راه ها هر ویژگی دو بعدی هستند مانند مرزهای خطوط (جاده ها، خطوط ساحلی، رودخانه ها و غیره ) یا چند ضلعی (دریاچه ها، مزارع، ساختمان ها و غیره ).). در نهایت یک رابطه گروهی از ویژگی ها از هر نوع مرتبط با یکدیگر در یک رابطه تعریف شده است. هر ویژگی دارای یک شماره شناسایی منحصر به فرد در گروه ویژگی خود است. گره ها تنها ویژگی هایی هستند که هندسه های مستقل دارند (طول و عرض جغرافیایی) در حالی که هندسه راه ها یا روابط از هندسه گره ها ساخته می شوند. برای انتساب، هر ویژگی می تواند به طور پیوسته تعداد نامحدودی از جفت های کلید-مقدار داشته باشد که به آنها برچسب می گویند. برخی از جفتهای کلید-مقدار که توسط جامعه OSM مورد توافق قرار گرفتهاند (مستند شده در OSM Wiki [ 2 ]) معانی خاصی برای ابزارهای رندر معمول OSM دارند (مانند Mapnik [ 4 ]). این برچسبهای مورد توافق جامعه بیشترین استفاده را دارند، البته استفاده از برچسبگذاری غیر استاندارد نیز مجاز است.
با تمرکز بر شبکه جادهای، جادههای OSM و ویژگیهای آنها زیرمجموعهای از «راههای» OSM هستند. کلید “بزرگراه” و مقدار آن مهمترین انتساب جاده هستند، اگرچه نام “بزرگراه” همیشه مرتبط نیست. با توجه به OSM Wiki (در زمان نگارش) بیش از 40 مقدار استاندارد را می توان برای کلید “بزرگراه” تنظیم کرد تا نوع جاده را تعریف کند، که از مسیرها به بزرگراه ها متفاوت است. برخی از مقادیر مثال عبارتند از: “بزرگراه”، “اصلی”، “مسکونی”، “پیاده راه” و “راه دوچرخه”. کلید استاندارد مفید دیگر (بدون مجموعه مقدار استاندارد) “ref” است که شماره مرجع یا کد مورد استفاده در سطح ملی برای شناسایی یک جاده (مثلاً “M1”) را ذخیره می کند. نام جاده نیز در کلید “نام” ذخیره می شود.
در این تحقیق، شبکه جادهای به عنوان ترکیبی از تمام «راههای» OSM با کلید «بزرگراه» غیر تهی تعریف میشود. «بزرگراه»، «مرجع» و «نام» سه ویژگی اصلی مورد استفاده در این تحقیق در کنار هندسه خود جادهها هستند.
2.2. داده های باز سیستم عامل
از آوریل 2010، Ordnance Survey مجموعه ای از نقشه های شطرنجی و برداری به نام OS OpenData را آزادانه برای عموم منتشر کرده است [ 5 ]. این مجموعه محصول در حال حاضر از سه محصول نقشه شطرنجی (MiniScale® ، 1:250000 Scale Raster و OS StreetView® ) و هشت محصول نقشه برداری (OS Locator TM ، 1:50000 Scale Gazetteer، Boundary-Line TM ، Land- Form® PANORA تشکیل شده است. ، Code- Point® Open، Strategi® ، Meridian TM -2 و OS VectorMap® District ) . برای اهداف ترکیبی، نقشه های برداری لازم است زیرا جزئیات ویژگی را حفظ می کنند.
Meridian TM -2 و OS VectorMap ® District (که از این پس VMD نامیده می شود) تنها دو مجموعه از فایل های شکل موضوعی هستند که از نظر جزئیات با OSM نسبتاً قابل مقایسه هستند. به طور کلی، OSM بیشتر با VMD قابل مقایسه است تا با Meridian با توجه به اهداف ترکیبی. بنابراین در این تحقیق، VMD اصلی ترین مجموعه داده مورد استفاده در میان محصولات OpenData سیستم عامل است. پوششی از مجموعه دادههای جاده مریدین و VMD در بالای پسزمینه OSM در شکل 1 دیده میشود .

شکل 1. مقایسه جادههای ناحیه VectorMap (VMD) (آبی) و مریدین (قرمز) در پسزمینه OpenStreetMap (OSM). دو نقشه همپوشانی از نظر کامل بودن و دقت متفاوت هستند.
در VMD، هر جاده با هندسه (در طرح شبکه ملی بریتانیا)، شماره شناسه، طبقه بندی (به عنوان مثال، جاده اصلی یا خیابان محلی)، DFT-Number (یک کد الفبایی تعیین شده توسط وزارت حمل و نقل در صورت لزوم، به عنوان مثال، تعریف می شود. ، M1 یا A6514) و در نهایت نام جاده.
2.3. ویژگی های OSM در مقابل . VMD
جدول 1 خلاصهای از تفاوتهای مشخصه و چالشهای تطبیق بین OSM و VMD است، بهویژه زمانی که شبکههای جادهای از دو مجموعه داده با هم ترکیب میشوند.

جدول 1. مقایسه ویژگی های OSM در مقابل VMD.
3. مطالعات مرتبط
مطالعات مربوطه را می توان به تحقیقات کیفیت OSM و مطالعات مربوط به مجموعه داده های جغرافیایی ترکیبی تقسیم کرد. پس از بررسی مطالعات مرتبط، جایگاه این مقاله در میان آنها تشریح خواهد شد.
3.1. کیفیت OSM
در حالی که داوطلبان OSM انگیزه بالایی برای تولید محتوای جغرافیایی به دلایل اجتماعی دارند [ 6 ] و مشارکت جمعیت می تواند به منبع معتبری با اصل «چشم ها» تبدیل شود، اعتبار VGI به طور کلی یکی از نگرانی های اصلی بوده است. برای موارد استفاده معتبر [ 7 ]. موفقیت، باز بودن و آزادی OSM، آن را به یک زمینه آزمایشی بسیار خوب برای محققان تبدیل کرده است تا ویژگیهای مختلف نقشهبرداری مشارکتی، مانند دقت نسبی و تحلیل کامل را مطالعه کنند. مقایسه آماری یک عکس فوری OSM در زمان با نقشه های رسمی توسط Haklay در [ 8 ] انجام شد. این مطالعه دقت و/یا کامل بودن نسبی OSM را نشان میدهد (همچنین در [ 9 ] پیگیری و گسترش یافت .10 ]). این تحقیق نشان میدهد که تا سال 2010، 29 درصد از انگلستان تحت پوشش OSM بود و 80 درصد از بزرگراهها در مقایسه با مجموعه داده Ordnance Survey با دقت 6 متر نقشهبرداری شدند. یک تحلیل پویا از تغییرات و ارزیابی کیفیت مکانی استاندارد دادههای OSM نیز در [ 11 ] انجام شده است، جایی که دادههای انگلستان در طول سال 2009 بین سه نمونه مختلف مقایسه شده است. در ایرلند، دقت OSM در تعدادی از مکان ها به صورت دستی با نقشه های گوگل و بینگ [ 12 ] مقایسه شده است و نمونه های آشکار بسیاری از تناقضات در سه منبع مورد مطالعه پیدا شد.
طبق ISO-19157 (اطلاعات جغرافیایی-کیفیت داده [ 13 ]) عناصر کیفیت داده های مکانی به عنوان کامل بودن، سازگاری منطقی، دقت موقعیت، قابلیت استفاده، دقت موضوعی و دقت زمانی طبقه بندی می شوند. این مقاله بر توصیف مفهوم کیفیت دادههای مکانی متمرکز نیست، زیرا این موضوع در بسیاری از منابع دیگر مورد بحث قرار گرفته است. نمونههایی از بررسیهای کیفیت دادههای مکانی در [ 14 ، 15 ]، بهویژه تحلیل کیفیت ویژه OSM است که در [ 16 ] ارائه شده است. معیار کیفیت متمرکز در این مقاله، دقت موضوعی (یافتن ویژگیهای گمشده) و کامل بودن (یافتن ویژگیهای ناهماهنگ) در موضوع شبکه جادهای است.
در متن این مقاله از کلمه “اشکال” برای تفاوت بین OS و انتساب جاده OSM استفاده خواهد شد. این کلمه در متن پروژه OSM-GB به عنوان هرگونه انحراف از قوانین تضمین کیفیت تعریف شده تعریف شده است. نویسندگان اذعان دارند که در برخی شرایط ممکن است اینها خطا نباشند. هدف این است که باگها به جامعه OSM بازخورد داده شوند تا انسانها مطابق با اخلاق جامعه OSM بررسی و رفع کنند.
3.2. تطبیق و تطبیق داده های مکانی
ادغام مجموعه داده های جغرافیایی یک کار چالش برانگیز است زیرا داده های مورد استفاده از حوزه ها، استانداردها و طرحواره های مختلف هستند. با این حال، به دلیل افزایش تعداد ارائه دهندگان داده های مکانی، تلفیق به یک کار اجتناب ناپذیر تبدیل شده است. حوزه های کاربردی شامل یکپارچه سازی داده ها، تشخیص تغییر، بهبود و به روز رسانی یک مجموعه داده بر اساس اطلاعات موجود در مجموعه داده های دیگر است [ 17 ]. منابع دادهها میتوانند شطرنجی یا برداری باشند، اما هر کدام میتوانند در قالبها و/یا استانداردهای تحویل متفاوتی باشند ( به عنوان مثال ، Grid یا GeoTiff برای رستر، و Shapefile یا GML برای بردار).
کار در [ 17 ] یک رویکرد ترکیبی سرویسگرا را ارائه میکند که ویژگیهای گمشده از OSM را به نقشه مرجع در آلمان اضافه میکند. کار در [ 18 ] همچنین یک روش تنظیم برداری برای افزایش دقت موقعیتی OSM شبکه جاده با مقایسه آن با تصاویر ماهوارهای مرجع در ایالات متحده ارائه میکند. این روش بهبود 86 درصدی را در دقت موقعیتی بین مجموعه دادههای قبل و بعد از ترکیب نشان داده است.
تطبیق ویژگی یک کار اصلی است که در آن می توان از تکنیک های تطبیق هندسه و اسناد هر دو استفاده کرد. پیچیدگی تطبیق ویژگی نه تنها به دلیل عدم دقت هندسی یا انتساب است، بلکه به این دلیل است که یک شی واحد ممکن است به طور متفاوت در مجموعه داده های مختلف نمایش داده شود [ 19 ]. روشی برای تطبیق شبکه جاده ای OSM با منبع نقشه تجاری در ایالات متحده (NavTeq) در [ 20 ] ارائه شده است که بیشتر برای اهداف تجاری طراحی شده است. یک روش تطبیق مبتنی بر ویژگی بین جاده های OSM و ITN (لایه شبکه حمل و نقل یکپارچه MasterMap از سیستم عامل، به عنوان نمونه ای از مجموعه داده مرجع) نیز در [ 21 ] ارائه شده است.]. از این روش برای ارزیابی آمار کامل بودن شبکه راه در مناطق شهری و روستایی بر اساس طول خطوط منطبق استفاده شده است. علاوه بر تطبیق ویژگیهای هندسی، رویکرد دیگر استفاده از روشهای مبتنی بر هستیشناسی (به عنوان مثال، در [ 22 ]) برای ادغام ویژگیها از حوزههای منبعجمعی و معتبر است.
3.3. جایگاه این مقاله
اکنون جایگاه این مقاله در حوزه تحقیق برجسته خواهد شد. مطالعات مرتبط عمدتاً بر دقت موقعیت یا کامل بودن هندسهها در OSM در مقایسه با مراجع واجد شرایط متمرکز شدهاند. علاوه بر این، نتایج تحقیق در چنین مطالعاتی یا روش های ترکیبی یا نتایج آماری را ارائه کرده است. شکاف تحقیقاتی قابل مشاهده اصلی این است که چگونه روش های توسعه یافته می توانند به طور بالقوه نسبت به یک OSM معتبر عمل کنند. بنابراین سهم اصلی این مقاله ادغام اشتراک گذاری کامل داده ها در روش تلفیقی است.
به عبارت دیگر، در اینجا رویکرد بازتری اتخاذ می شود. برای توضیح بیشتر در مورد باز بودن، مشخص خواهد شد که روش ارائه شده برای به اشتراک گذاشتن آشکار جزئیات کامل عدم تطابق روزانه و همچنین نقشه های ترکیبی در جامعه OSM استفاده می شود. این تا حدی به این دلیل است که هر دو منبع نقشه باز هستند و تا حدودی به این دلیل است که از خدمات وب باز استفاده می شود. در نتیجه، جامعه برای ایجاد یک OSM معتبرتر کمک میشود. به عنوان مثال، یک کاربر OSM می تواند OSM، VMD و ویژگی های ناهماهنگ فردی را در یک برنامه GIS واحد (مثلا QGIS) ببیند و سپس به راحتی تغییرات مورد نظر را در حوزه مورد علاقه خود اعمال کند. از سوی دیگر، خروجی دقیق را می توان برای تسهیل تحقیقات آینده، به عنوان مثال، بررسی و تجزیه و تحلیل الگوهای جغرافیایی کاستی های OSM استفاده کرد. در یک زمینه گسترده تر،23 ]).
علاوه بر سهم اولیه، تعدادی کمک ثانویه نیز ایجاد می شود. اولاً، در حالی که مطالعات مرتبط عمدتاً بر دقت و کامل بودن هندسی متمرکز شده اند، مطالعه ارائه شده در اینجا بر جنبه های اسنادی متمرکز است. ثانیاً، استفاده از یک موتور قانون/عمل قابل برنامه ریزی، روش ادغام را پویا و قابل تنظیم کرده است. در نهایت، نتایج فرآیندهای ادغام برخی از الگوهای جغرافیایی خاص را که در بخش 7 مورد بحث قرار خواهد گرفت، نشان میدهد .
4. در هم آمیختن سناریوها
به طور کلی، هر دو OSM و VMD را می توان با استفاده از یکدیگر غنی کرد. در حالی که VMD به طور بالقوه می تواند با تلفیق با OSM غنی شود، تمرکز این تحقیق بر غنی سازی OSM با VMD است. دلیل این جهت غنیسازی این است که OSM غنیشده میتواند فوراً و آزادانه توسط عموم هضم شود تا ذخیرهگاه دادههای OSM فعلی را تغییر دهد.
تفاوت های کلیدی OSM/VMD و مسائل اختلاط قبلاً در جدول 1 خلاصه شده است . شکل 2 نمونه ای از سطح کامل بودن نسبی شبکه های راه در مناطق شهری و روستایی را نشان می دهد. قابل توجه است که در هر دو مورد، هر منبع داده به طور بالقوه می تواند با استفاده از داده های دیگری بهبود یابد. جادههایی مانند مسیرهای دوچرخهسواری یا مسیرهای پیادهروی که به طور گسترده در OSM نقشهبرداری شدهاند، طبق تعریف محصول در VMD نقشهبرداری نمیشوند. از سوی دیگر، برخی از جاده های VMD وجود دارند که هنوز در OSM نقشه برداری نشده اند. مسئله دیگر در مقایسه دو منبع داده، مسئله به روز رسانی است. نمونه ای از چنین مسائلی در شکل 3 نشان داده شده است .
سناریوهای مختلفی را می توان برای غنی سازی OSM طراحی کرد. چنین سناریوهایی باید طوری طراحی شوند که جزئیات و ظرفیت های OSM و VMD را در نظر داشته باشند. از آنجایی که تمرکز در این مطالعه بر روی ویژگی های جاده بوده است، سناریوهای انتخاب شده به شرح زیر تعریف می شوند:
- (آ)
-
افزودن/تصحیح نام جاده های OSM از نام جاده های VMD.
- (ب)
-
افزودن/تصحیح ارجاعات جاده OSM از VMD DFT-Numbers.
- (ج)
-
پرچم گذاری جاده های بدون نقشه در OSM که در VMD وجود دارد.
در سناریوی (c) بالا، یک برنامه افزودنی می تواند اضافه کردن جاده های نقشه برداری نشده از VMD به OSM باشد، اما این عمل در حال حاضر روی “پرچم گذاری” تنظیم شده است، به عنوان مثال ، به سادگی جاده بدون نقشه را برجسته می کند اما آن را به OSM اضافه نمی کند. این می تواند به ویژه در مناطق روستایی که OSM در مقایسه با مناطق شهری به اندازه کافی غنی نیست مفید باشد. با این حال، اضافه کردن جادههای بدون نقشه به دلیل تعدادی از چالشهای اضافی برای کارهای آینده در نظر گرفته شده است:
- (آ)
-
افزودن یک ویژگی به OSM معمولاً توسط کاربران OSM در زیرساخت داده مرکزی OSM انجام می شود. اگر یک ویژگی جدید به پایگاه داده ترکیبی اضافه شود، برخی از مشکلات همزمانی وجود خواهد داشت زیرا تعدادی از ویژگی ها از جمله شماره شناسایی و اطلاعات کاربر بین دو مجموعه داده مطابقت ندارند.
- (ب)
-
مانند هر ترکیب هندسی دیگری، اعمال این سناریو ممکن است به تنظیمات دیگر در هندسه های موجود (از جمله ویژگی های جاده و غیر جاده) نیاز داشته باشد. یک تنظیم متداول این است که جادههای تازه ایجاد شده را به جادههایی که قبلاً در آن حضور دارند، ببندید. با این حال، هنگامی که این فرآیند در ابتدا تلاش شده است، تنظیمات هندسی تعدادی هندسه نادرست ایجاد کرده است.

شکل 2. مقایسه سطح کامل شبکه جاده در ناحیه VectorMap (قهوه ای) و OpenStreetMap (پس زمینه) در یک منطقه شهری (شهر ناتینگهام، بالا ) و یک منطقه روستایی (در اطراف لینکلن، پایین ).
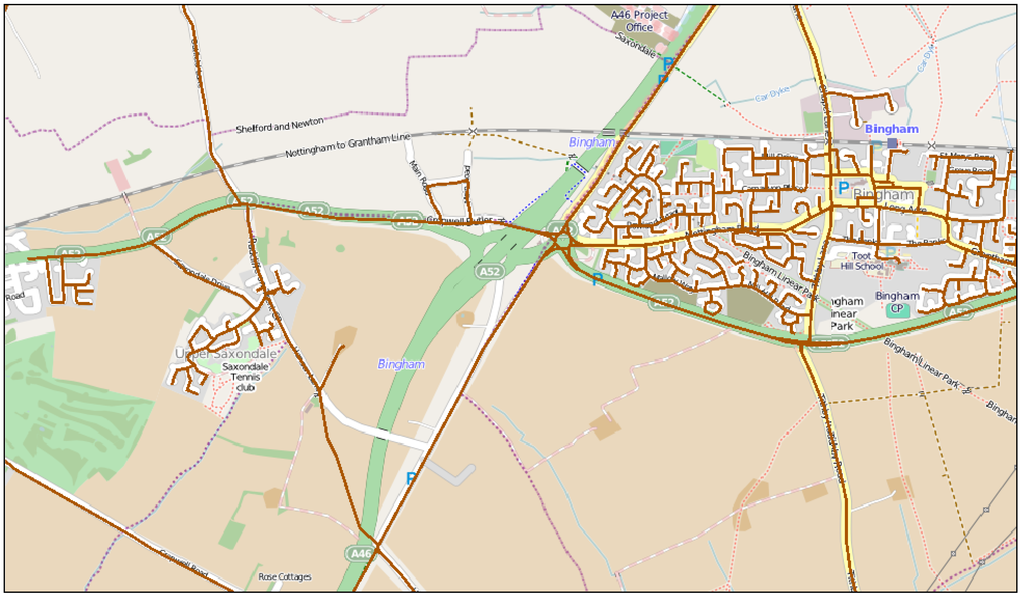
شکل 3. مشکلات مربوط به چرخه به روز رسانی VMD: طرح جاده جدید (A52 توسط Bingham, Nottingham) که به خوبی در OSM (پس زمینه) نقشه برداری شده است هنوز در VMD (قهوه ای) به روز نشده است.
چالش دیگر سطح اعتماد به نقشه های ملی است، زیرا مواردی وجود دارد که مشارکت کنندگان OSM به درستی نقشه های ملی اعتقاد ندارند. در این موارد سوال این خواهد بود که چگونه می توان ترکیب را انجام داد. مکانیسم فعلی به کاربران OSM اجازه میدهد تا یک جاده خاص را علامتگذاری کنند تا در روش ترکیبی نادیده گرفته شود (کلید “OSMGB:isbug” باید روی “نه” برای جاده OSM خاص تنظیم شود). جاده برچسبگذاریشده تغییر نخواهد کرد، اگرچه بهعنوان نامناسب علامتگذاری شده است.
5. روش شناسی
در این بخش، جزئیات روشهای توسعهیافته برای سناریوهای ادغام توضیح داده شده در بخش قبل ارائه میشود. موقعیت این روش در گستره وسیع تری پروژه، تکنیک های مدیریت داده ها و قوانین/اقدامات توسعه یافته برای هر سناریو نیز شرح داده خواهد شد.
5.1. رویکرد یکپارچه
همانطور که قبلاً ذکر شد، روش مورد استفاده در این تحقیق بخشی از یک چارچوب پردازش کیفیت یکپارچه (OSM-GB) است که در آن مجموعهای از قوانین/اقدامات برای بررسی/رفع اشکالات موجود در دادههای OSM ایجاد میشود. قوانین/اقدامات در این مورد خاص برای مقایسه OSM و VMD طراحی شده اند. هنگامی که قوانین و اقدامات تخصصی توسعه یافتند، بقیه اجزای پروژه می توانند قوانین/عملکردها را در آینه OSM محلی اعمال کنند و نتایج را به کاربران ارائه دهند. ویژگی های جغرافیایی ذخیره شده در OSM در برابر هر قانون بررسی می شود. اگر یک ویژگی با قانون مطابقت نداشته باشد، عمل مربوط به ویژگی اعمال می شود. به عنوان مثال، یک قانون ممکن است معیارهایی را برای شناسایی اینکه آیا یک ویژگی بین VMD و OSM مطابقت دارد یا خیر، تعریف کند. سپس عمل مربوطه مشخص میکند که چگونه یک جاده گمشده به OSM اضافه میشود، زمانی که این قانون برآورده نمیشود. نرم افزار مورد استفاده برای این منظور Radius Studio است که توسط 1Spatial [24 ]. قوانین/عملکردها با استفاده از یک رابط کاربری گرافیکی و/یا زبان رسمی خاص طراحی شده برای Radius Studio تعریف می شوند.
5.2. مدیریت دادهها
نرم افزار Radius Studio نیاز دارد که منابع داده در یک پایگاه داده فضایی Oracle قرار داشته باشند. همچنین خروجی را به جداول فضایی Oracle می نویسد. تبدیل داده های OSM به پایگاه داده Oracle Spatial در دو مرحله انجام می شود: ابزار OSM2PGSQL [ 2 ] برای بارگیری پشتیبان های روزانه OSM-XML (ارائه شده توسط Geofabrik [ 25 ]) در پایگاه داده PostGIS استفاده می شود و OGR2OGR [ 26 ] برای تبدیل آن از PostGIS به Oracle Spatial استفاده می شود. دلیل اصلی اجرای چنین فرآیند تبدیل غیرمستقیم این است که بقیه سیستم به طور کلی به پایگاه داده PostGIS متکی است. در حال حاضر رویکرد متفاوتی که به اندازه این راه حل غیرمستقیم کارآمد باشد، شناسایی نشده است.
برای بارگذاری VMD در Oracle Spatial، چندین مرحله اضافی لازم است. Ordnance Survey به کاربران اجازه می دهد تا VMD را دانلود کنند (یا یک نسخه سی دی از آن را سفارش دهند، که یک سری فایل شکل برای هر یک از 56 کاشی Ordnance Survey National Grid (100 × 100 کیلومتر در هر کاشی) است. شبکه جاده در یکی از 22 لایه فرعی هر کاشی کدگذاری شده است، بنابراین می توان با ادغام 56 فایل شکل به یک شبکه جاده کامل دست یافت. SHP2PGSQL (ابزار منبع باز در توزیع بسته کوانتومی GIS [ 27])، می تواند برای ادغام و بارگذاری فایل های شکل در PostGIS استفاده شود. به دلیل ادغام پایگاه داده سیستم، داده های VMD برای ذخیره در PostGIS مورد نیاز است. سپس به همان روشی که برای تبدیل OSM توضیح داده شد به Oracle Spatial تبدیل می شود. هنگامی که هر دو OSM و VMD به Oracle Spatial تبدیل شدند، Radius Studio قوانین/عملکردهای توسعهیافته را اعمال میکند و نتایج را در یک جداول فضایی Oracle ثانویه که حاوی جزئیات عدم تطابق است، خروجی میدهد. این جداول با استفاده از ابزار OGR2OGR دوباره به PostGIS تبدیل می شوند. یک اسکریپت زمانبندیشده، اصلاحات را روی دادههای اصلی در PostGIS اعمال میکند، در حالی که از دادههای تصحیحشده و تصحیحنشده برای مقاصد تحلیلی پشتیبانگیری میکند.
با داشتن مجموعه دادههای تصحیح شده و تصحیح نشده در PostGIS، نقشههای ترکیبی و تفاوتهای فردی سپس از طریق سرویسهای وب استاندارد OGC (مانند WMS و WFS) به عموم ارائه میشوند. GeoServer برای ارائه داده های ذخیره شده در پایگاه داده به عنوان WMS و WFS در سیستم های مرجع مختصات مختلف استفاده می شود. به عنوان مثال، یک WFS برای سرور نقشه های ترکیبی طراحی شده است، در حالی که WFS دیگری برای ارائه جزئیات ویژگی های ناهماهنگ طراحی شده است. علاوه بر این، OSM و VMD اصلی نیز به عنوان WMS و WFS ارائه می شوند. به دلیل یکپارچگی سرویس وب شرح داده شده، همه نقشه های ارائه شده را می توان به طور مداوم در سمت مشتری (به عنوان مثال، با استفاده از یک برنامه GIS دسکتاپ واحد) در دسترس قرار داد، که تصحیح جمعیت را تسهیل می کند. جزئیات بیشتر در مورد راه حل منبع باز مورد استفاده را می توان در [ 28].
چرخه تبدیل داده روزانه مورد بحث هیچ تاثیری بر کیفیت داده های OSM ندارد مگر اینکه اقدامات توسعه یافته فراخوانی شوند. اگر هیچ اقدامی اعمال نشود، چرخه روزانه تمام هندسه ها و ویژگی های اصلی را به طور مداوم حفظ می کند. از سوی دیگر، قاعدهای که هندسه یا ویژگی ناهماهنگ را بازنویسی میکند، هیچ هندسه یا ویژگی دیگری را در مجموعه داده تغییر نخواهد داد.
5.3. قوانین / اقدامات برای افزودن / تصحیح نام / مراجع
قوانین ایجاد شده برای سناریوهای مربوط به تصحیح وجود نام جاده ها و مراجع ابتدا تمام جاده های OSM را که جاده ای معادل در VMD دارند شناسایی می کند. سپس بررسی ها در برابر مقادیر ذخیره شده انجام می شود:
- (آ)
-
اگر جاده VMD یک نام دارد، جاده OSM باید همان نام را داشته باشد.
- (ب)
-
اگر جاده VMD دارای شماره DFT باشد، جاده OSM باید همان مرجع را داشته باشد.
اگر یک جاده OSM یکی از قوانین فوق را رعایت نکند، اقدامات زیر اعمال خواهد شد:
- (آ)
-
اگر طبق قانون (الف) ناموفق باشد، نام جاده OSM با نام جاده VMD جایگزین می شود.
- (ب)
-
اگر طبق قانون (ب) ناموفق باشد، مرجع جاده OSM با شماره DFT جاده VMD جایگزین می شود.
- (ج)
-
در هر دو مورد، خطاهای شناسایی شده و تغییرات در نام یا مقادیر مرجع به ترتیب در دو ویژگی جداگانه به نامهای “اشکال” و “رفع” یادداشت میشوند.
در مجموع، 4 زوج قانون/عمل مورد نیاز است تا امکان تصحیح نام و ارجاعات جادهها فراهم شود. برای مثال، موارد زیر اجرای زبان رسمی قانون برای افزودن نام جادههای گمشده در Radius Studio را نشان میدهد:
| موارد OSM_LINE را بررسی کنید | |
| اگر OSM_LINE.name برابر با null باشد | |
| و OSM_LINE.highway برابر با null نیست | |
| و OSM_LINE.highway برابر با “cycleway” نیست | |
| و OSM_LINE.highway برابر با “مسیر” نیست | |
| و (حداقل 1 شی VMD_ROAD برای آن وجود دارد | |
| (VMD_ROAD.geometry در بافر موجود است (OSM_LINE.geometry,0.0001) | |
| یا OSM_LINE.geometry در بافر قرار دارد (VMD_ROAD.geometry,0.0001)) | |
| و VMD_ROAD.name برابر با null نیست | |
| سپس | |
| به_کوچک (VMD_ROAD.name) برابر با_کوچک (OSM_LINE.name) است | |
این قانون خطوط OSM را شناسایی می کند که (الف) بدون نام و بدون برچسب “بزرگراه = مسیر چرخه” یا “بزرگراه = مسیر”، (ب) دارای یک جاده مطابق هندسی از VMD، و (ج) جاده مطابق با VMD دارای نام است. . مقدار 0.0001 در خط 7 (بر حسب درجه) در نقشه پیش بینی شده تقریباً 7 متر است. این بدان معنی است که اگر جاده VMD در داخل یک بافر 7 متری از جاده OSM باشد، این دو جاده مطابقت دارند. این فاصله یک مقدار اکتشافی است که اثربخشی بهینه قانون را بر اساس ویژگیهای OSM و VMD نشان داده است. با این حال، کار آینده ممکن است برای اصلاح بیشتر این فاصله برای یک الگوریتم بهینه ضروری باشد. مسیرها و مسیرهای دوچرخهسواری از الگوریتم حذف شدهاند، زیرا اولاً این نوع جادهها در VMD وجود ندارند و ثانیاً میتوانند به انواع جادهها خیلی نزدیک باشند، بنابراین میتوان نام آنها را به اشتباه تغییر داد.
کد منبع زیر اجرای عملکرد مرتبط با جاده هایی را که قوانین فوق را رعایت نمی کنند را در Radius Studio نشان می دهد:
| برای اشیاء OSM_LINE | ||
| برای اولین شی VMD_ROAD که برای آن | ||
| (VMD_ROAD.geometry در بافر موجود است (OSM_LINE.geometry,0.0001) | ||
| یا OSM_LINE.geometry در بافر قرار دارد (VMD_ROAD.geometry,0.0001)) | ||
| و VMD_ROAD.name برابر با null نیست | ||
| و to_lowercase (VMD_ROAD.name) برابر با_کوچک نیست (OSM_LINE:A.name) | ||
| یک شی از کلاس OSM_LINE_CORRECTED و | ||
| {اجازه دهید OSM_LINE_CORRECTED.{همه ویژگیهای رایج} = OSM_LINE.{همه ویژگیهای رایج} | ||
| اجازه دهید OSM_LINE_CORRECTED.name = VMD_ROAD.name | ||
| اجازه دهید OSM_LINE_CORRECTED.BUG = “نام جاده خالی” | ||
| اجازه دهید OSM_LINE_CORRECTED.FIX = “نام به ” + VMD_ROAD.name} تغییر کرد | ||
کلاس شی OSM_LINE_CORRECTED (خط 6 در بالا) پسوندی برای کلاس OSM_LINE با دو ویژگی اضافی به نامهای «اشکال» و «رفع» است. سیستم به گونه ای طراحی شده است که خروجی ها در یک جدول پایگاه داده جداگانه به نام OSM_LINE_CORRECTED ذخیره می شوند. خطاهای شناسایی شده را می توان قبل از اعمال تغییرات در داده های اصلی در صورت نیاز، مستقل از داده های اصلی با استفاده از این جدول مدیریت و ارائه کرد.
5.4. برخورد با جاده های نقشه برداری نشده در OSM که در VMD وجود دارد
قانون تشخیص ویژگیهای جادهای که در VMD وجود دارند اما در OSM وجود ندارند، بسیار شبیه به قانون پیادهسازی شده برای شناسایی ویژگیهایی است که نیاز به اصلاح نام یا مراجع دارند. مرحله اول شناسایی جادههایی در VMD است که دارای جادههای همسان هندسی در OSM هستند:
| اشیاء VMD_ROAD را بررسی کنید | ||
| حداقل 1 شی OSM_LINE برای آن وجود دارد | ||
| OSM_LINE.highway برابر با null نیست | ||
| و OSM_LINE.highway برابر با “cycleway” نیست | ||
| و OSM_LINE.highway برابر با “مسیر” نیست | ||
| و (VMD_ROAD.geometry در بافر موجود است (OSM_LINE.geometry,0.0001) | ||
| یا OSM_LINE.geometry در بافر قرار دارد (VMD_ROAD.geometry,0.0001)) | ||
جاده هایی که در VMD وجود دارند اما در OSM وجود ندارند، می توانند به عنوان “مفقود” تلقی شوند. همانطور که در سناریوهای ترکیبی توضیح داده شد، می توان اقدامی را طراحی کرد تا در واقع جاده گمشده را به OSM اضافه کند. مشخص شد که این اقدام چالش برانگیز است زیرا هندسه های نادرستی ایجاد می کند، عمدتاً به دلیل تفاوت های موقعیت غیرقابل پیش بینی بین دو مجموعه داده. با این حال، یک راه حل تعدیل جزئی در اینجا ارائه شده است، اما نیاز به توسعه بیشتر دارد (اقدامی که در حال حاضر اجرا می شود فقط علامت گذاری آن به عنوان جاده گم شده است):
| برای اشیاء VMD_ROAD: | ||||
| اگر (هیچ شی PLANET_OSM_LINE برای آن وجود ندارد | ||||
| OSM_LINE.highway برابر با null نیست | ||||
| و OSM_LINE.highway برابر با “cycleway” نیست | ||||
| و OSM_LINE.highway برابر با “مسیر” نیست | ||||
| و (VMD_ROAD.geometry در بافر موجود است (OSM_LINE.geometry,0.0001) | ||||
| یا OSM_LINE.geometry در بافر قرار دارد (VMD_ROAD.geometry,0.0001)) | ||||
| سپس یک شی از کلاس OSM_LINE_CORRECTED ایجاد کنید و | ||||
| اجازه دهید OSM_LINE_CORRECTED.BUG = “جاده بدون نقشه” | ||||
| اجازه دهید OSM_LINE_CORRECTED.FIX = VMD_ROAD.name | ||||
| اجازه دهید OSM_LINE_CORRECTED.geometry = VMD_ROAD.geometry | ||||
| برای همه اشیاء OSM_LINE که برای آنها | ||||
| (start_of(OSM_LINE_CORRECTED.geometry) در فاصله 0.0001 OSM_LINE.geometry قرار دارد | ||||
| و اینطور نیست که OSM_LINE_CORRECTED.geometry برابر OSM_LINE.geometry باشد) | ||||
| اجازه دهید OSM_LINE_CORRECTED.geometry = move_vertex(OSM_LINE_CORRECTED.geometry,start_of(OSM_LINE_CORRECTED.geometry),nearest_point(start_of(OSM_LINE_CORRECTED.geometry), OSM_LINEtruemetry)، | ||||
| برای همه اشیاء OSM_LINE که برای آنها | ||||
| (end_of(OSM_LINE_CORRECTED.geometry) در فاصله 0.0001 OSM_LINE.geometry قرار دارد | ||||
| و اینطور نیست که (LINE_CORRECTED.geometry برابر OSM_LINE.geometry)) | ||||
| اجازه دهید OSM_LINE_CORRECTED.geometry = move_vertex(OSM_LINE_CORRECTED.geometry,end_of(OSM_LINE_CORRECTED.geometry),nearest_point(end_of(OSM_LINE_CORRECTED.geometry), OSM_LINE.geometry,t)) | ||||
هنگامی که جاده نقشه برداری نشده از VMD اضافه می شود، مسئله اصلی این است که هندسه اضافه شده به شبکه جاده موجود است. اگر این کار انجام نشود، جاده اضافه شده ممکن است از نظر هندسی به بقیه شبکه جاده متصل نباشد. این در عمل فوق پس از افزودن جاده بدون نقشه با استفاده از تعدادی توابع داخلی از جمله move_vertex()، nearest_point()، start_of() و end_of() پیاده سازی می شود.
6. نتایج
6.1. تصحیح نام های نامناسب جاده ها
در حال حاضر 2471 جاده OSM در OSM بریتانیا یافت می شود که نام آنها با VMD مطابقت ندارد. نام جاده های OSM با نام جاده های VMD جایگزین شده است. یک ترکیب نمونه در شکل 4 نشان داده شده است .

شکل 4. نمونه ای از نام جاده های همسان (جاده طولانی باید Canvey Road، نزدیک لندن باشد). ( بالا ): OSM اصلی; ( وسط ): نقشه داده باز سیستم عامل همان منطقه. ( در زیر ): به روز شده در OSM-GB.
6.2. تصحیح مراجع نامتناسب جاده
در حال حاضر 377 مرجع جاده در OSM وجود دارد که با جاده های همسان در VMD متفاوت است. شکل 5 نمونه ای از این عدم تطابق ها را نشان می دهد.

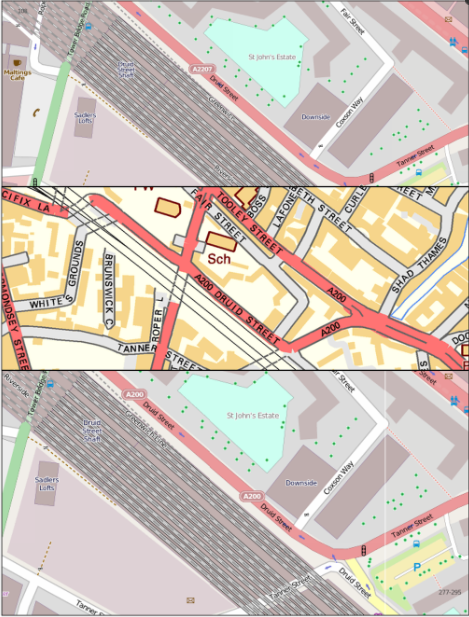
شکل 5. موردی از ارجاعات جاده ای نامتناسب: خیابان دروید (نزدیک پل تاور، لندن) که به عنوان A2207 در OSM ( بالا ) ارجاع شده است، A200 را در VMD ( وسط ) می خواند و در OSM-GB ( زیر ) به روز شده است – اما مشخص نیست چرا یک خیابان موازی بالای این نیز به عنوان A200 در VMD (وسط) ذکر شده است.
6.3. افزودن نام جاده های گمشده
در حال حاضر 2026 نام جاده گمشده در OSM از جاده های VMD منطبق گرفته شده است. تصحیح نمونه در شکل 6 نشان داده شده است .

شکل 6. نمونه ای از نام جاده های اضافه شده (جاده فاورشم، نزدیک اشفورد). ( بالا ): OSM اصلی; ( وسط ): نقشه داده باز سیستم عامل همان منطقه. ( در زیر ): به روز شده در OSM-GB.
6.4. اضافه کردن مراجع گمشده جاده
در حال حاضر 1121 مرجع گمشده جاده در OSM وجود دارد که با استفاده از داده های VMD تکمیل شده است. یک مثال در شکل 7 نشان داده شده است .
شکل 8 توزیع جغرافیایی ویژگی های جاده نامتناسب/فقدان را نشان می دهد.
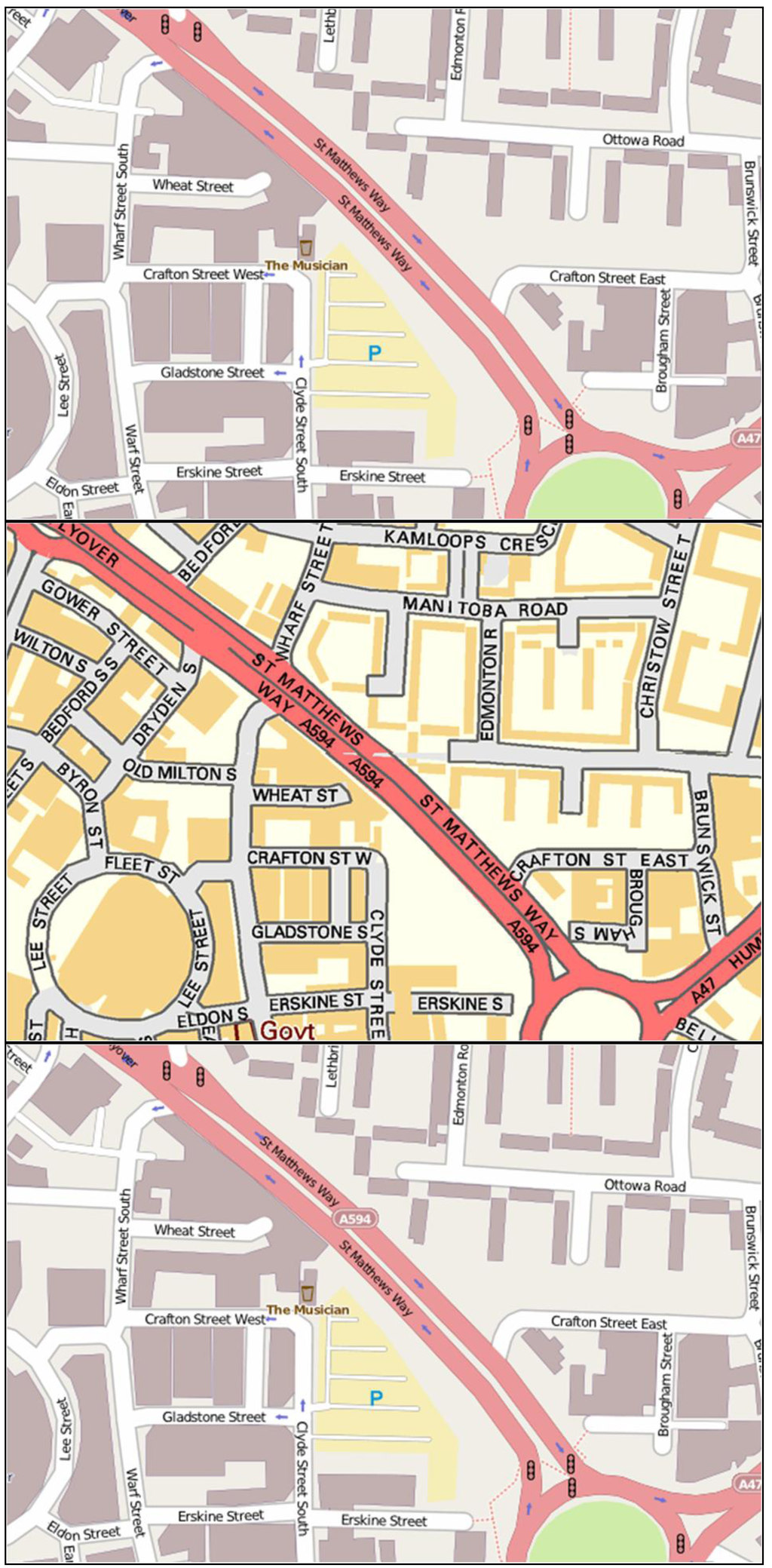
شکل 7. نمونه ای از نام جاده های اضافه شده (A594، در لستر). ( بالا ): OSM اصلی; ( وسط ): نقشه داده باز سیستم عامل همان منطقه. ( در زیر ): به روز شده در OSM-GB.
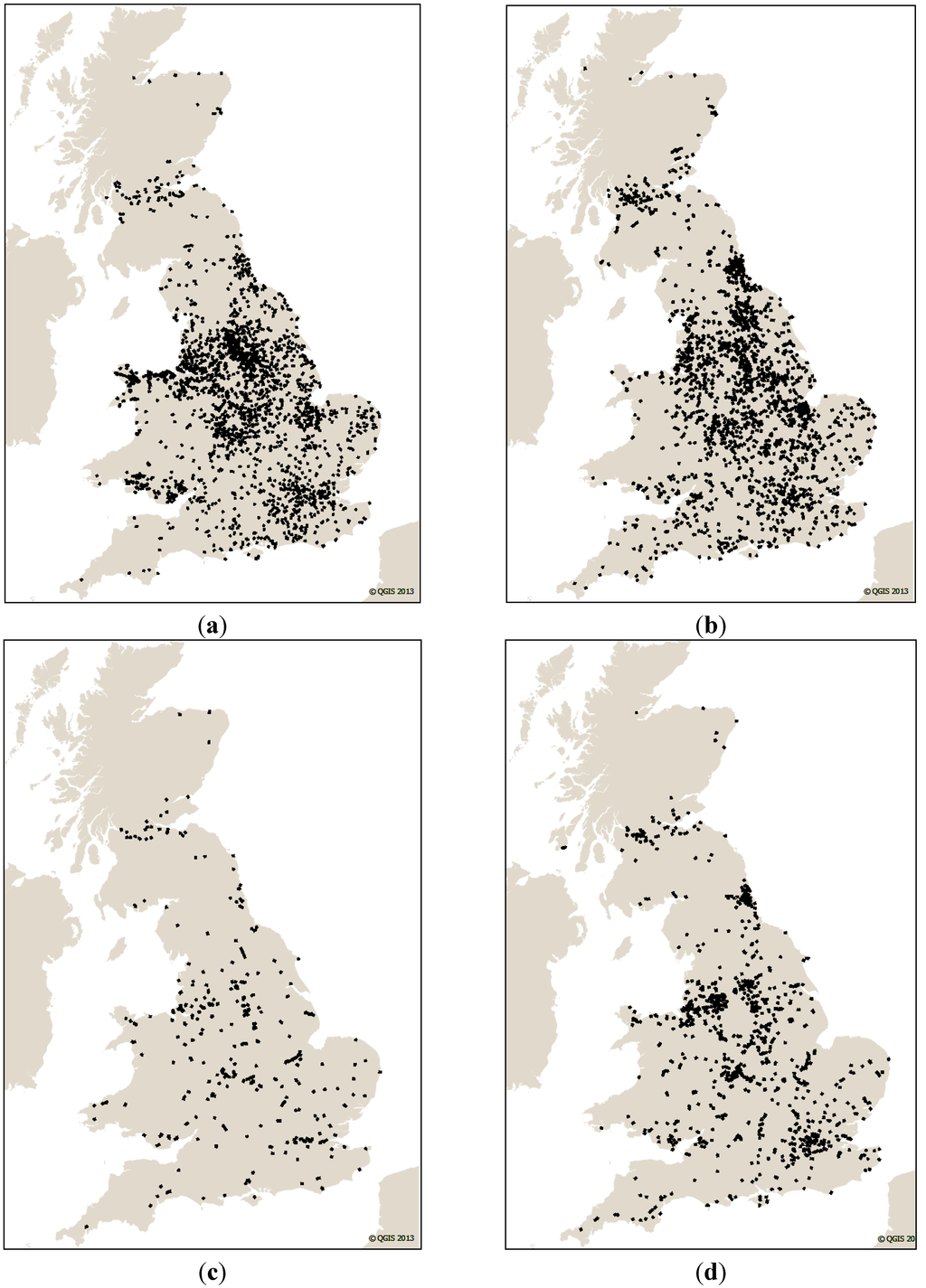
شکل 8. توزیع جغرافیایی ( الف ) نامهای جادهای نامتناسب. ( ب ) نام جاده ها از دست رفته است. ( ج ) ارجاعات جاده ای نامتناسب؛ ( د ) مراجع گمشده جاده.
7. بحث
توزیع نام ها و مراجع نامناسب و گمشده جاده ها (به اصطلاح “اشکالات”) نشان داده شده در شکل 8را می توان برای بررسی کیفیت تخصیص جاده OSM تجزیه و تحلیل کرد. برای انجام چنین اکتشافی، نرخ باگ باید نرمال شود و سپس نسبت جاده های باگ به تعداد کل جاده ها در یک منطقه (که به عنوان نسبت باگ نامیده می شود) بررسی شود. این نسبت باگ به طور معکوس نشان دهنده دقت و کامل بودن OSM در آن ناحیه است. در آن محاسبه، تعداد کل جاده ها از VMD گرفته می شود (زیرا برخلاف OSM، کامل بودن VMD قرار است به طور مساوی در همه مناطق توزیع شود). سپس انتظار می رود که نسبت اشکال ممکن است در مناطق روستایی به دلیل در دسترس بودن کمتر مشارکت کنندگان عمومی در مجموعه داده OSM بالاتر باشد. این فرضیه هم برای انواع اشکال و هم برای انواع ویژگی (عدم تطابق و مقادیر از دست رفته) قابل بررسی است.
برای ارزیابی اعتبار فرضیه فوق، تحلیل ناحیه ای انجام شد. انتخاب اندازه منطقه همچنین ممکن است بر نتیجه تجزیه و تحلیل تأثیر بگذارد. برای تمایز بین مناطق شهری و روستایی، اندازه منطقه انتخاب شده برای پوشش حدود یک شهر متوسط تا بزرگ در هر منطقه انتخاب شد. به همین دلیل، نقشه بریتانیا تقریباً به 1200 مربع تقسیم شده است که هر مربع در ابعاد 20 × 20 کیلومتر است. سپس شبکه ها بر اساس تراکم جاده VMD طبقه بندی می شوند.
شکل 9 نتایج تجزیه و تحلیل نسبت های باگ را نشان می دهد. این نمودار ابتدا نشان میدهد که اوجهای نسبت اشکال عدم تطابق (قرمز) و گمشده (آبی) بیشتر در مناطق با چگالی پایینتر قرار دارند (اثر معکوس تراکم بر نسبت اشکال). ثانیاً نشان می دهد که شهرهای متوسط نسبت باگ بیشتری نسبت به شهرهای بزرگ مانند لندن دارند.

شکل 9. مقایسه الگوهای نسبت اشکالات نام جاده ها و تراکم جاده ها. محور x کاشی ها را نشان می دهد که بر اساس تراکم جاده ها مرتب شده اند. پیکهای کشویی دو نوع نسبت اشکال را نشان میدهند. نمودار بالایی ( a ): نسبت اشکال برای نام جاده. نمودار پایین ( b ): نسبت اشکال برای مراجع جاده. قرمز: صفات نامتناسب؛ آبی: ویژگی های گمشده
به منظور کمی کردن نتایج، محدوده تراکم جاده (0 تا 72 K جاده در هر کاشی) به چهار باند با فاصله مساوی تقسیم شد، یعنی بسیار کم (0-18 K)، کم (18-36 K)، زیاد (36) -54 K) و بسیار زیاد (54-72 K). از آنجایی که هر کاشی یک مربع 20 × 20 کیلومتر است، فواصل آنها به ترتیب معادل تراکم جاده 0-45، 45-90، 90-135 و 135-180 جاده در کیلومتر مربع است . عملا، گروه “بسیار بالا” محدود به منطقه لندن است. برخی از شهرهای بزرگ در باند بالا و شهرهای دیگر در باند پایین قرار دارند. باند “خیلی کم” بیشترین فراوانی را دارد که بیشتر از مناطق روستایی تشکیل شده است. شکل 10 a,b الگوهای نسبت اشکال را مطابق باندهای تراکم جاده فوق نشان می دهد.
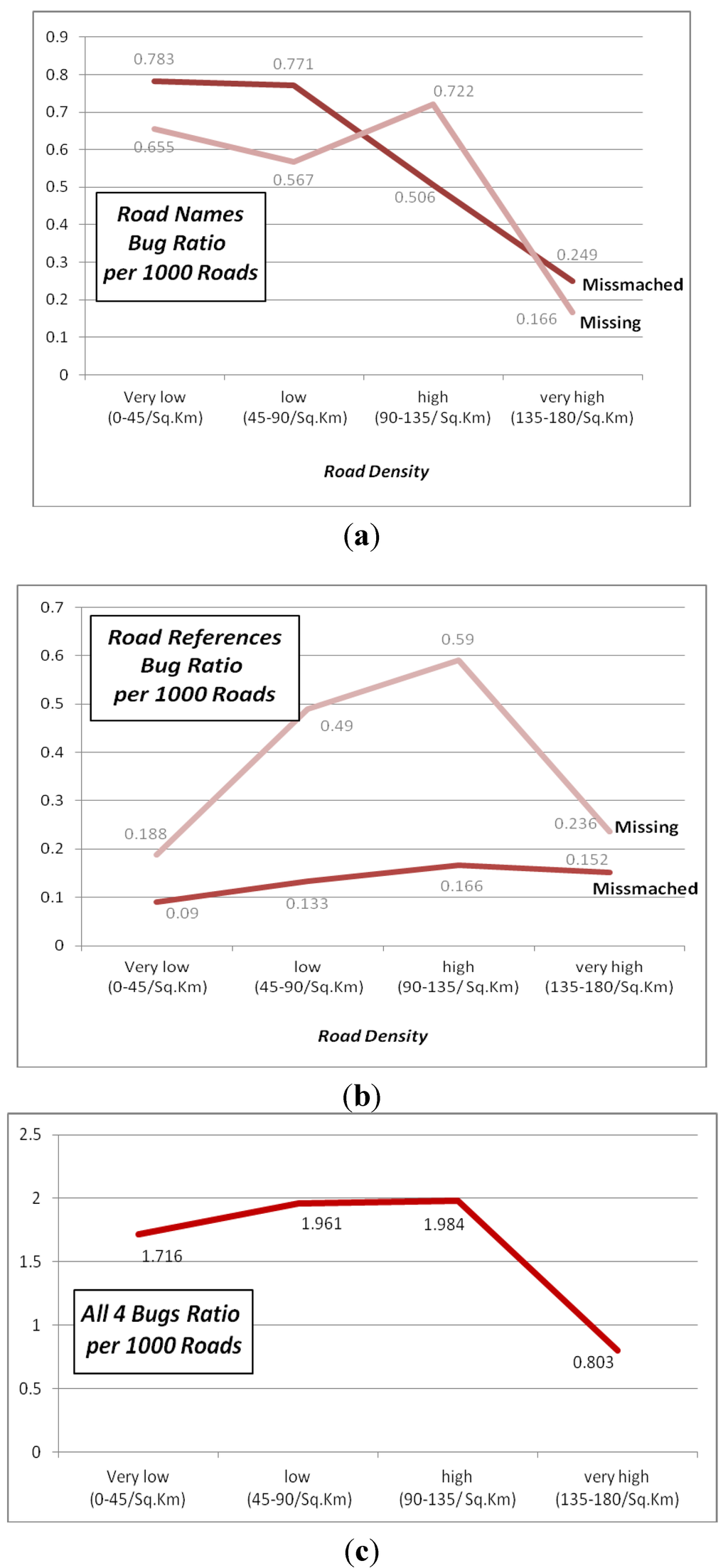
شکل 10. نمودارهای نسبت اشکال در هر 1000 جاده بر اساس چهار باند تراکم. ( الف ) نامهای جادهای نامتناسب و گمشده؛ ( ب ) ارجاعات جاده ای نامتناسب و مفقود؛ و ( ج ) نسبت کل اشکالات.
شکل 10 الف که نسبت اشکال نام جاده را نشان می دهد، دو الگوی مختلف را برای نام های نامناسب و گمشده جاده، به ویژه در باند با تراکم بالا نشان می دهد. این نشاندهنده اوج نسبت نامهای گمشده جادهها در شهرهای نسبتاً بزرگ به استثنای لندن است، در حالی که در غیر این صورت نسبت اشکالات با تراکم کاهش مییابد. شکل 10 ب نشان می دهد که انتظار ما مبنی بر کاهش نسبت اشکال با افزایش تراکم ویژگی فقط برای مراجع جاده در باند چگالی “بسیار بالا” معتبر است. در سه باند پایین تر، نسبت مراجع گم شده و نامتناسب جاده با تراکم جاده افزایش می یابد. خط مرجع گمشده جاده تقریباً 50 درصد افت را از باند بالا به باند بسیار بالا نشان می دهد، با این حال کاهش در میزان عدم تطابق قابل توجه نیست.
در نهایت وقتی همه اشکالات جمع شدند، همانطور که در شکل 10 ج نشان داده شده است، مناطق تراکم را می توان با کیفیت ویژگی عمومی جاده مرتب کرد. بهترین کیفیت در مناطق بسیار متراکم، سپس در مناطق با تراکم بسیار کم، و در نهایت در وسط وجود دارد. شهرهای بزرگ
به منظور توضیح الگوهای نشان داده شده در شکل 10 ، ابتدا باید فرضیات مربوط به کیفیت VMD را یادآوری کرد. اگر میزان نامهای جادهها یا ارجاعات گمشده در VMD به اندازهای که فرض میشود از نظر فضایی یکنواخت نباشد، میتواند بر نسبتهای باگ مربوطه تأثیر بگذارد. ثانیاً، عدم تطابق (در نام جاده ها یا مراجع) به دلیل تفاوت های واقعی بین حقایق زمینی و نقشه های رسمی یا اشتباهات نقشه برداران OSM ایجاد می شود. نامها/مرجعهای گمشده جادهها ممکن است با ردیابی ویژگی در ویرایشگرهای OSM از طریق تصاویر بدون تأیید زمینی یا سایر منابع دادههای ویژگی به وجود بیایند.
از آنجایی که فرآیندهای جمعآوری دادهها متفاوت است، میتوان انتظار داشت که اشکالهای مربوط به نام جادهها توزیعهای متفاوتی را در مقایسه با موارد مربوط به مراجع جاده نشان دهند. مراجع کدهای الفبایی عددی خاصی هستند که نقشهبرداران OSM میتوانند از منابع رسمی یا تابلوهای راهنما پیدا کنند، در حالی که نامها را میتوان از منابع دیگر جمعآوری کرد. نرخ وارد کردن یک مرجع جاده اشتباه (با فرض اعتبار دادههای VMD) کم و نسبتاً ثابت در تمام باندهای چگالی است – اگر مرجعی ارائه شده باشد، احتمالاً صحیح است. این شانس برای مراجعات جاده ای از دست رفته بیشتر است، و نشان داده شده است که این شانس در شهرها در مقایسه با مناطق بسیار کم یا تراکم بسیار زیاد حتی بیشتر است. نمودارها همچنین ممکن است اهمیت نسبی ارجاع جاده را نشان دهنددر مقابل نامگذاری جاده در انواع مختلف منطقه. میتوان گفت که ارجاعات جادهها از ویژگیهای مهمتر جادههای خارج از شهرکها هستند (و در واقع، نام راهها ممکن است در مناطق مشخص نباشد)، در حالی که در شهرها و شهرها، نام جادهها ویژگیهای مهمتری هستند. عدم تقارن بیشتری وجود دارد که در آن مسیرهای اصلی بیشتر دارای ارجاع هستند اما ممکن است نام نداشته باشند در حالی که جاده های فرعی بیشتر احتمال دارد که نام داشته باشند تا مرجع. لندن ممکن است محیطی متفاوت از سایر مناطق کشور باشد نه تنها به دلیل تراکم جاده های مختلف (و نسبت نسبی جاده های کوچک و اصلی) بلکه به دلیل تمرکز بسیار بیشتر کاربران OSM برای ارائه تضمین کیفیت.
8. آثار آینده
پلتفرم OSM-GB طیف وسیعی از تحقیقات تحلیلی را در مورد داده های OSM و کیفیت آن در دسترس قرار داده است که این تحقیق تنها نمونه ای از آن است. با توجه به ترکیب OSM و OS، زمینه های اصلی برای کارهای آینده عبارتند از:
- (1)
-
افزودن جادههای گمشده و تصحیح ویژگیهای جادههای OSM با توجه به انواع منابع نقشه سیستمعامل.
- (2)
-
کار بر روی موضوعات دیگر، به عنوان مثال، ساختمان ها، POI، آبراه ها، و غیره.
- (3)
-
ساختن نسخه های غنی شده از نقشه های سیستم عامل به عنوان مثال، اضافه کردن مسیرهای دوچرخه سواری یا مسیرهای پیاده روی از OSM.
- (4)
-
در نظر گرفتن سایر ویژگی ها و تجزیه و تحلیل اثرات آنها بر کیفیت OSM. یک مثال استفاده از ویژگی version_no OSM (که نشان میدهد چند بار یک ویژگی نقشه توسط کاربران ویرایش میشود) و تجزیه و تحلیل ارتباط آن با نسبتهای باگ مورد بحث در این مقاله است.
- (5)
-
بررسی عمیقتر نسبتهای باگ مورد بحث در این مقاله برای بررسی اینکه چگونه دادههای مرجع، ابزار کار، پوشش دنیای واقعی منابع و نامهای جادهها، انتخاب منطقه و تراکم متغیر مشارکتکنندگان به طور متفاوتی به الگوهای مشاهدهشده در اینجا کمک میکنند.
9. نتیجه گیری
در این مقاله، دو منبع نقشه شبکه جادهای بریتانیا از دو منبع نسبتاً متفاوت مطابقت داده شدهاند: OpenStreetMap (OSM) بهعنوان منبع جمعی و منطقه نقشه برداری Ordnance Survey (VMD) به عنوان مجموعه دادههای منبع رسمی. با تجزیه و تحلیل دو ویژگی اصلی جاده (نام و مرجع) مواردی که نام یا ارجاعات در OSM وجود ندارد یا بین دو نقشه مطابقت ندارد (به نام اشکال) برجسته شده است. نتیجه یک OSM غنی شده با نام ها و مراجع اضافه یا ثابت است که از طریق سرویس های وب استاندارد با جزئیات کامل ارائه می شود. الگوهای مشاهده شده عبارتند از:
- (1)
-
هرچه تراکم جاده بیشتر باشد، نسبت نامهای جادهای ناهمخوان کمتر است.
- (2)
-
نسبت نام جادههای گمشده در شهرهای بزرگ بالا، در شهرها پایین و در پایتخت بسیار کم است.
- (3)
-
نسبتهای مرجع جادهای نامتناسب معمولاً در شهرهای بزرگ بیشتر از مناطق کم تراکم است.
- (4)
-
نسبت مراجع گمشده جاده با تراکم جاده افزایش می یابد اما در پایتخت به طور قابل توجهی کاهش می یابد.
- (5)
-
در مجموع بهترین کیفیت در مناطق بسیار متراکم، سپس در مناطق بسیار کم تراکم و در نهایت در شهرهای متوسط تا بزرگ است.
روش ارائه شده در اینجا می تواند برای مضامین مختلف در مقایسه بین نقشه های رسمی و نقشه های جمعی استفاده شود. تجزیه و تحلیل دادههای تطبیق نقشه میتواند الگوهای مختلف کیفیت را در تولید نقشه بهویژه در سمتی که منبع جمعی است، آشکار کند.
منابع
- OSMGB. صفحه اصلی پروژه OSM-GB — اندازه گیری و بهبود کیفیت OpenStreetMap برای بریتانیای کبیر. موجود آنلاین: http://www.osmgb.org.uk (در 1 ژوئن 2013 قابل دسترسی است).
- OSM-Wiki. ویکی پروژه OpenStreetMap . در دسترس آنلاین: http://wiki.openstreetmap.org/wiki/ (دسترسی در 1 ژوئن 2013).
- BeyoNav. رشد OpenStreetMap شتاب می گیرد. در دسترس آنلاین: http://www.beyonav.com/openstreetmaps-growth-accelerates (در 1 ژوئن 2013 قابل دسترسی است).
- پاولنکو، آ. مپنیک. موجود آنلاین: http://mapnik.org/ (در 1 ژوئن 2013 قابل دسترسی است).
- سیستم عامل Ordnance Survey OpenData . در دسترس آنلاین: http://www.ordnancesurvey.co.uk/oswebsite/products/os-opendata.html (دسترسی در 1 ژوئن 2013).
- Goodchild، MF Citizens به عنوان حسگر: دنیای جغرافیای داوطلبانه. ژئوژورنال 2007 ، 69 ، 211-221. [ Google Scholar ] [ CrossRef ]
- Flanagin، AJ; Metzger, MJ اعتبار اطلاعات جغرافیایی داوطلبانه. جئوژورنال 2008 ، 72 ، 137-148. [ Google Scholar ] [ CrossRef ]
- Haklay, M. اطلاعات جغرافیایی داوطلبانه چقدر خوب است؟ مطالعه تطبیقی مجموعه دادههای OpenStreetMap و Ordnance Survey. محیط زیست طرح. B 2010 , 37 , 682-703. [ Google Scholar ]
- Ather، A. تجزیه و تحلیل کیفیت داده های OpenStreetMap. کارشناسی ارشد پایان نامه، کالج دانشگاه لندن، لندن، انگلستان، 2009. [ Google Scholar ]
- کونادی، او. ارزیابی کیفیت داده های نقشه خیابان باز. کارشناسی ارشد پایان نامه، کالج دانشگاه لندن، گروه مهندسی عمران، محیط زیست و ژئوماتیک، لندن، انگلستان، 2009. [ Google Scholar ]
- آنتونیو، V. محتوای فضایی تولید شده توسط کاربر: تحلیلی از پدیده و چالش های آن برای آژانس های نقشه برداری . دانشگاه کالج لندن (UCL): لندن، بریتانیا، 2011. [ Google Scholar ]
- سیپلوچ، بی. یعقوب، ر. وینستانلی، ا. Mooner, P. مقایسه دقت OpenStreetMap برای ایرلند با Google Maps و Bing Maps. در مجموعه مقالات نهمین سمپوزیوم بین المللی ارزیابی دقت فضایی در منابع طبیعی و علوم محیطی، لستر، بریتانیا، 20 تا 23 ژوئیه 2010.
- ISO, ISO/CD 19157 اطلاعات جغرافیایی—کیفیت داده ; ISO: ژنو، سوئیس، 2010.
- دیویلر، آر. Jeansoulin, R. Fundamentals of Spatial Data Quality ; کتابخانه آنلاین وایلی: لندن، انگلستان، 2006. [ Google Scholar ]
- کیفیت داده های فضایی Oort، PAJ: از توضیحات تا کاربرد. دکتری پایان نامه، دانشگاه Wageningen، Wageningen، هلند، 2006. [ Google Scholar ]
- مونی، پی. کورکوران، پ. Winstanley، AC Towards Quality Metrics for Openstreetmap. در مجموعه مقالات هجدهمین کنفرانس بین المللی SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2 تا 5 نوامبر 2010. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- ویمن، اس. Bernard, L. خدمات ترکیبی در زیرساخت های داده های مکانی. در مجموعه مقالات سیزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، 2010 AGILE، گیماراس، پرتغال، 10-14 مه 2010.
- کاناووسیو-زوزلسکی، آر. آگوریس، پ. Doucette، P. یک رویکرد فتوگرامتری برای ارزیابی دقت موقعیتی جادههای OpenStreetMap©. ISPRS Int. J. Geo-Inf. 2013 ، 2 ، 276-301. [ Google Scholar ] [ CrossRef ]
- استانکوته، اس. Asche, H. بهبود کیفیت داده های مکانی با استفاده از ترکیب داده ها. در علوم محاسباتی و کاربردهای آن-ICCSA 2011 ; Springer: برلین-هایدلبرگ، آلمان، 2011; ص 492-500. [ Google Scholar ]
- لودویگ، آی. ووس، ا. Krause-Traudes، M. مقایسه شبکه های خیابانی Navteq و OSM در آلمان. در پیشرفت علم اطلاعات جغرافیایی برای جهانی در حال تغییر . Springer: برلین-هایدلبرگ، آلمان، 2011; صص 65-84. [ Google Scholar ]
- کوکولتسوس، تی. هاکلی، م. Ellul، C. ارزیابی کامل بودن داده VGI از طریق یک روش تطبیق خودکار برای داده های خطی. ترانس. GIS 2012 ، 16 ، 477-498. [ Google Scholar ] [ CrossRef ]
- دو، اچ. آناند، اس. آلچینا، ن. مورلی، جی. هارت، جی. لیبوویچی، دی. جکسون، ام. Ware, M. ادغام اطلاعات مکانی برای داده های برداری جاده معتبر و منبع جمعیت. ترانس. GIS 2012 ، 16 ، 455-476. [ Google Scholar ] [ CrossRef ]
- پورعبدالله، ع. مورلی، جی. فلدمن، اس. جکسون، ام. مطالعه الگوهای پویا اشکالات نقشه خیابان باز در بریتانیای کبیر. در مجموعه مقالات شانزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی؛ لوون، بلژیک: 14–17 مه 2013.
- 1 فضایی 1 وب سایت فضایی . موجود آنلاین: http://www.1spatial.com (در 1 ژوئن 2013 قابل دسترسی است).
- ژئوفابریک. ژئوفابریک . موجود آنلاین: http://www.geofabrik.de/ (در 1 ژوئن 2013 قابل دسترسی است).
- GDAL. ogr2ogr . در دسترس آنلاین: http://www.gdal.org/ogr2ogr.html (در 1 ژوئن 2013 قابل دسترسی است).
- QuantumGIS. پروژه رومیزی کوانتومی GIS. در دسترس آنلاین: http://www.qgis.org/ (دسترسی در 1 ژوئن 2013).
- پورعبدالله، ع. مورلی، جی. Feldman، S. OSM-GB: استفاده از ابزارهای مکانی منبع باز برای ایجاد خدمات وب OSM برای بریتانیای کبیر. در مجموعه مقالات ششمین کنفرانس نرم افزار رایگان و منبع باز برای زمین فضایی (FOSS4G)، ناتینگهام، انگلستان، 17-21 سپتامبر 2013. در حال چاپ.
© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر