1. معرفی
شهرهای مدرن اغلب متراکم با ساختمان های بسیار بلندی هستند که جاده ها و مکان های دیدنی همسایه را مسدود می کنند. سفر در چنین مناطق شهری ناآشنا کار دشواری است. با کمک سیستم های ناوبری خودرو یا نقشه ها، کاربران می توانند مسیرهای خود را برنامه ریزی کرده و به مقصد خود برسند. در حال حاضر اکثر این سیستم ها مجهز به نقشه های دیجیتال هستند. اگرچه نقشههای دوبعدی میتوانند یک نمای کلی از ویژگیهای مورد علاقه (FOI) ارائه دهند، اما ناتوانی آنها در حفظ یک نمای خودمحور واقعگرایانه منجر به شهودی کمتر و کاهش خوانایی چنین نقشههای شهری به دلایل زیر میشود: اول، تفسیر یک نقشه میتواند نیاز داشته باشد. تلاش ذهنی قابل توجه کاربر باید موقعیت خود را پیدا کند و نقشه را به درستی جهت دهد [ 1 ]. دوم، یک تناظر بین نقشه و محیط باید ایجاد شود [2 ، 3 ]. انسان ها این کار را با شناسایی و تطبیق نشانه ها در یک صحنه با نمایش نقشه خود انجام می دهند [ 4 ]. سوم، واقع گرایی محیط سه بعدی از بین می رود. نقشه دو بعدی نمی تواند اطلاعات عمقی را ارائه دهد. بنابراین، نمی تواند مطابقت بصری با مناظر واقعی مردم در زندگی روزمره خود داشته باشد [ 5 ].
با توسعه سریع فتوگرامتری، بینایی کامپیوتر، اسکنرها و فناوریهای مدلسازی سهبعدی، در حال حاضر امکان ساخت مدلهای سهبعدی دقیق و آسان به روشی مقرونبهصرفه وجود دارد [ 6 ، 7 ]. در مقایسه با نقشههای دوبعدی، نمایش سهبعدی محیطهای شهری اطلاعات عمقی را ارائه میدهد. بنابراین، بازنمایی بصری بهتری را ارائه می دهد و واقع گرایی محیط شهری را حفظ می کند. با این حال، انسداد توسط اشیاء شهری بسیار رایج است، به ویژه برای شهرهایی که مملو از آسمان خراش ها هستند. هنگامی که از پرسپکتیو استفاده می شود، اشیای دور به ناچار توسط آنهایی که به نقطه دید نزدیکتر هستند مسدود می شوند [ 8]]. در مورد برنامه های ناوبری اتومبیل، مسیری که باید طی شود احتمالاً توسط ساختمان های مرتفع اطراف مسدود می شود. بنابراین، کاربران نمی توانند اطلاعات مکانی مربوط به مسیر را به دست آورند و در نتیجه نمی توانند مقدمات خوبی را برای پیچ ها یا تقاطع های آینده انجام دهند. از بین بردن انسداد ویژگی های مهم جغرافیایی در حالی که به طور همزمان طرح کلی یک نقشه سه بعدی را حفظ می کند، چالش برانگیز است [ 9 ]. هیرونو و همکاران [ 5 ]. علاوه بر این، ارائه چنین نمای بدون انسداد منابع محاسباتی قابل توجهی را مصرف می کند.
برای رسیدگی به این مشکلات، یک روش بهینهسازی برای حذف خودکار انسداد FOI در مناطق شهری ارائه شده است و در عین حال اعوجاجها را تا حد امکان کوچک میکند ( شکل 1 را ببینید ). مسئله بدون انسداد به عنوان یک مسئله برنامه ریزی درجه دوم فرموله شده است. گسترش مسیر، جابجایی ساختمان، و مقیاس بندی ساختمان در چارچوب بهینه سازی ادغام شده اند. ما فرض میکنیم که نشانههای مرتبط با مسیر مورد علاقه از قبل در دسترس هستند و برای تجسم در کنار مسیر در چارچوب بهینهسازی یکسانی ادغام شدهاند. روش ما میتواند دید FOIهای مسدود شده را در حالی که تغییر شکلهای چشمانداز را به حداقل میرساند، به حداکثر برساند.
آثار اصلی این مقاله را می توان به شرح زیر خلاصه کرد:
- (1)
-
یک چارچوب تجسم تعاملی جدید ارائه کنید که سه عملگر را ادغام می کند تا از اعوجاج های بزرگ در حین انکار جلوگیری کند.
- (2)
-
یک رویکرد بهینهسازی پیشنهاد کنید که شامل معیارهای مناسب شباهت و انسداد FOI باشد.
- (3)
-
اجرای یک مدل تغییر شکل پذیر برای مناطق شهری که ساختمان ها و خیابان ها را در نظر می گیرد.
2. کارهای مرتبط
2.1. تجسم FOI
کارپندل و همکاران [ 10 ] و موسر و همکاران. [ 11 ] تکنیکهای تغییر شکل را در محیطهای سهبعدی برای بزرگنمایی منطقه مورد نظر معرفی کرد. یک ابزار تجسم بدون انسداد می تواند برای ناوبری، در بازی ها و در عملیات نظارت مفید باشد. در اینجا، اصطلاح ناوبری شامل ناوبری مبتنی بر ماشین، ناوبری موبایل و سیستم های ناوبری رایانه ای می شود. کاربران مکان، محیط اطراف و اطلاعات اطلاعاتی خود را سریع و راحت درک خواهند کرد. تکنیک های بدون انسداد نیز در نقشه های بازی سه بعدی مفید هستند. علاوه بر این، با استفاده از مانیتورها و تجسم بدون انسداد، میتوانیم برخی از FOI را برای مکان یابی و دستگیری سریع مجرمان انتخاب کنیم. با این حال، اعوجاج های معرفی شده توسط روش های حذف انسداد همیشه یک نگرانی عمده است. تاکاهاشی و همکاران [ 12] سیستمی برای ایجاد نقشه های پانوراما ایجاد کرد که دید جاده ها و مکان های مهم را افزایش می دهد. بعداً، آنها یک انیمیشن مسیر بدون انسداد را برای ناوبری اتومبیل در مناطق کوهستانی پیشنهاد کردند [ 9 ]. در سیستم آنها انسدادها با تنظیم مجدد نشانه های روی صفحه حذف می شوند. این رویکرد همچنین مستلزم این است که نشانههای جغرافیایی از دیدگاههای مختلف در نیمکرهای که زمین را پوشش میدهد، نمونهبرداری شود تا همه موقعیتهای انسداد در نظر گرفته شود. بنابراین، تعداد نشانهها معمولاً زیاد است و کوچکتر کردن دادهها بدون معرفی مصنوعات دشوار است. اگر تعداد نشانهها زیاد باشد، ممکن است ایجاد نماهای بدون انسداد در نرخهای فریم تعاملی خستهکننده باشد.
در این مقاله، ما به طور عمده بر حذف FIOs در محیط های شهری تمرکز می کنیم. یک برنامه نویسی درجه دوم قطعی مثبت برای حذف انسداد FOI فرموله شده است. یک رندر چند منظری، آنچه را که از چندین دیدگاه مشاهده می شود در یک تصویر واحد ترکیب می کند. علیرغم ناهماهنگی این دیدگاه ها، تصاویر چند منظری موثر هنوز هم می توانند انسجام فضایی را حفظ کنند. گرابلر و همکاران با ترکیب تکنیکهای رندر چند منظر و تعمیم کارتوگرافی. [ 13] سیستمی را برای تولید خودکار نقشه های توریستی ایجاد کرد که برجسته ترین اشیاء مانند خیابان ها و مکان های دیدنی را برجسته می کند. این سیستم ساختمان ها را در نماهای چند منظره نمایش می دهد تا دید مسیرهای مناسب و نشانه های مرتبط را افزایش دهد. این تکنیک رندر چند منظره میتواند دید FOI و نشانهها را افزایش دهد، اما این یک فرآیند زمانبر است و باعث ایجاد اعوجاجهای زیادی در سایر اشیاء در محیطهای شهری سهبعدی میشود. دژنر و همکاران [ 2] یک مدل دوربین مبتنی بر تغییر شکل فضا را معرفی کرد که برای نمایش مسیرهای کوتاه با نشان دادن کل مسیر به طور پیوسته، همانطور که از یک چشم انداز خود محور در یک تصویر مشاهده می شود، طراحی شده است. با این حال، اعوجاج بزرگ مسیرهای زیگزاگی و پیچ خورده ناشی از آن اغلب باعث ناوبری گمراه کننده برای کاربران می شود. بعدها Degener و Klein [ 14 ] یک رویکرد متغیر برای تولید نقشه های پانوراما در مناطق کوهستانی ارائه کردند. این رویکرد میتواند نمای کلی خوبی ارائه دهد و از پوشاندن ویژگیهای مهم جغرافیایی جلوگیری کند. با این حال، به محاسبات قابل توجهی نیز نیاز دارد. گلاندر و دولنر [ 15 ، 16] بلوک های سلولی بدون بافت را برای جایگزینی مدل های اصلی ساختمان سه بعدی ایجاد کرد تا برجسته سازی نقطه عطفی پویا با توجه به فاصله دوربین مجازی انجام شود. آنها به یک جلوه بصری صاف دست یافتند، اما این رویکرد جزئیات مهم تصاویر شهر را ضعیف می کند. کوی و همکاران [ 17 ] یک رویکرد خودکار برای محاسبه یک دوربین پرتو منحنی ایجاد کرد که مسیرها را به گونهای نشان میدهد که هنگام اتصال دوربینهای محاسبهشده، میتوان نماهای بدون انسداد را به دست آورد. با این حال، آشفتگی روابط فضایی ناشی از این رویکرد دوربین محور یک نگرانی عمده است. هیرونو و همکاران [ 5] روشی را برای افزایش خوانایی نقشه ارائه کرد که می تواند معیارهای طراحی رایج را که اغلب در نقشه های مصور دستی ایجاد شده توسط هنرمندان نقشه کشی به کار می رود، شناسایی کند. این روش جهت گیری ثابت، موقعیت نسبی و محدودیت های مقیاس را برای حفظ ثبات در چیدمان ویژگی های جغرافیایی به کار می برد و آنها را به عنوان محدودیت های سخت فرموله می کند، در حالی که حداقل جابجایی و اجتناب از انسداد را به عنوان یک رویکرد ظریف برای افزایش واقعیت و خوانایی نقشه های شهری سه بعدی معرفی می کند. به ترتیب. چالش در اینجا یافتن تغییر شکل هندسه نقشه سه بعدی است که پنج معیار طراحی را برآورده کند. آنها این مشکل را به عنوان یک مسئله بهینه سازی محدود با استفاده از تکنیک های برنامه ریزی خطی فرموله کردند، اما روش آنها فقط می تواند نقشه های بدون انسداد استاتیک ایجاد کند.
2.2. تفاوت بین روش پیشنهادی و روش های مرتبط
اخیراً روش های تغییر شکل [ 5 ، 18 ، 19 ] برای کاهش انسداد در مناطق شهری پیشنهاد شده است. روش های تغییر شکل با تغییر شکل اجسام مسدود شده و محیط اطراف، خط دید را پاک می کنند. دنگ و همکاران [ 18 ] یک روش خودکار ارائه کرد که یک تجسم تعاملی آگاه از بافت از ویژگی های شهری مربوطه را امکان پذیر می کرد. هیرونو و همکاران [ 5 ] یک روش بهینهسازی را بر اساس معیارهای زیباییشناختی رایج برای از بین بردن نشانهها برای محیطهای شهری پیشنهاد کرد. با این حال، این بهینه سازی تعامل مورد نیاز برای وظایف مختلف را پشتیبانی نمی کند. کو و همکاران [ 19] یک روش تمرکز+زمینه ارائه کرد که دارای نماهای چشم پرنده با مسیرهای گسترده و نقاط دیدنی بزرگ شده است. در این مقاله، ما یک روش تجسم برای تولید نماهای بدون انسداد برای FOI به طور خودکار ارائه می کنیم. این روش از سه اپراتور عدم انسداد استفاده می کند: تعریض جاده، کاهش مقیاس ساختمان، و جابجایی ساختمان. روش ما یک مصالحه بهینه را در میان اپراتورهای انسداد فراهم میکند که اعوجاج را به حداقل میرساند و در عین حال دید FOI را افزایش میدهد. نماهای سهبعدی ایجاد شده، نمای کلی خوبی از FOI ارائه میکند و در عین حال شباهت زیادی بین منظر شهری از هم گسیخته و ظاهر اصلی آن حفظ میکند. کارهای قبلی که بیشتر مرتبط با رویکرد ما هستند، آثار کو و همکاران هستند. [ 19 ]، هیرونو و همکاران. [ 5 ] و دنگ و همکاران. [ 18]. در اینجا، ما تفاوت های بین روش پیشنهادی خود و این روش های موجود را مورد بحث قرار خواهیم داد:
- (1)
-
تفاوت بین روش پیشنهادی و روش دنگ و همکاران. [ 18 ].
دنگ و همکاران [ 18روش ] از چهار اپراتور عدم انسداد – ارتفاع دیدگاه، جابجایی جاده، مقیاس بندی ساختمان، و جابجایی ساختمان – برای تجسم FOI های شهری استفاده کرد. استفاده از عملگر عدم انسداد ارتفاع دید بسیار بحث برانگیز است، زیرا این راه حل هم بی اهمیت است و هم چندان مطلوب نیست. در یک محیط تعاملی، تغییر دیدگاه یک نگرانی است و چنین تغییراتی محدودیت عمده روش دنگ را تشکیل می دهد. کاربران باید بتوانند کنترل دیدگاه را در یک برنامه تعاملی حفظ کنند. بنابراین، در این مقاله ما فقط اپراتورهای گسترش مسیر، جابجایی ساختمان، و مقیاسبندی ساختمان را ادغام میکنیم و از آنها در چارچوب بهینهسازی برای حذف انسدادهای FOI استفاده میکنیم. علاوه بر این، محدودیتهای مکانی و زمانی به کار گرفته میشوند تا دیدگاههای عدم انسداد را هم از نظر مکانی و هم از لحاظ زمانی سازگار نگه دارند.18 ] برنامهریزی درجه دوم متوالی را برای حل مسئله بهینهسازی با استفاده از یک رویکرد تکراری به کار برد که در آن هر مرحله تکرار به گرادیان و هسین تابع لاگرانژ نیاز دارد. در نتیجه، زمانی که تعداد توابع دید زیاد باشد، این روش به مقدار زیادی محاسبات نیاز دارد. در مقابل، در این مقاله، یک روش برنامهریزی درجه دوم قطعی مثبت برای حذف انسدادهای FOI فرموله میکنیم.
- (2)
-
تفاوت بین روش پیشنهادی و روش هیرونو و همکاران. [ 5 ].
- (من)
-
ما از یک نمای مبتنی بر شی برای محدود کردن تغییر شکل شکل شهری به جای حفظ جهتگیریهای خطوط موازی جفتی استفاده میکنیم، زیرا حفظ خطوط زمان محاسبه را افزایش میدهد. علاوه بر این، روش ما جادهها و ساختمانهای مربوطه را بهعنوان اشیاء واحد در نظر میگیرد تا موقعیتهای آنها را محدود کند، که هزینههای زمانی را کاهش میدهد. این رویکرد کاملاً با رویکرد هیرونو و همکاران متفاوت است. [ 5 ].
- (II)
-
ما مسئله انیمیشن بدون انسداد را به عنوان یک مسئله برنامهنویسی درجه دوم فرموله میکنیم و ماتریس را در طول پیشپردازش تجزیه میکنیم، و امکان تولید نماهای بدون انسداد را از فریم به فریم با نرخ فریم تعاملی فراهم میکنیم. روش بهینهسازی مورد استفاده در [ 5 ] شباهت را حفظ میکند، اما تعامل بالای سیستم مورد نیاز در وظایف مختلف را به دلیل بار محاسباتی بالا در بهینهسازی ارائه نمیکند.
- (3)
-
تفاوت بین روش پیشنهادی و روش کو و همکاران. [ 19 ].
ما گسترش مسیر، جابجایی ساختمان، و مقیاس بندی ساختمان را در یک چارچوب بهینه سازی ادغام می کنیم و یک سری انرژی های اعوجاج را برای حفظ شباهت شهری طراحی می کنیم. نتیجه این چارچوب بهینهسازی میتواند دید FOIهای مسدود شده را به حداکثر برساند، در حالی که شباهت زیادی به نماهای اصلی دارد. کو و همکاران [ 19] سه مرحله را برای ایجاد دیدگاه های آگاه از زمینه اتخاذ کرد. آنها ابتدا جاده ها را با تکنیک درز کنده کاری بزرگ کردند و سپس از تکنیک زوم مبتنی بر شبکه برای گسترش بلوک ها و مکان های دیدنی استفاده کردند. در نهایت، برای ساختمانهایی که هنوز مسیر را مسدود کردهاند، ساختمانها را کوچکنمایی میکنند تا مسیر را آشکار کنند. اگرچه آنها از روش بهینه برای هر مرحله استفاده می کنند، روش آنها شامل بهینه سازی سراسری نمی شود. علاوه بر این، آنها یک مسیر و نشانههای مرتبط با آن را تنها از یک نمای چشم پرنده 45 درجه حذف میکنند، در حالی که روش ما چنین محدودیتی ندارد.
3. تجسم سه بعدی بدون انسداد تعاملی
نقشهسازان از انواع تکنیکهای تعمیم نقشهکشی از جمله سادهسازی، جابجایی، تغییر شکل و انتخاب برای بهبود وضوح نقشهها و تأکید بر مهمترین اطلاعات مکانی استفاده میکنند، در حالی که روابط فضایی بین اشیاء نقشه را حفظ میکنند [4 ، 19 ، 20 ] . در این کار، ما مجموعهای از تکنیکهای تعمیم، از جمله گسترش مسیر، جابجایی ساختمان، و مقیاسبندی ساختمان را از طریق یک چارچوب بهینهسازی برای حذف انسداد از اشیاء شهری اطراف اعمال میکنیم.
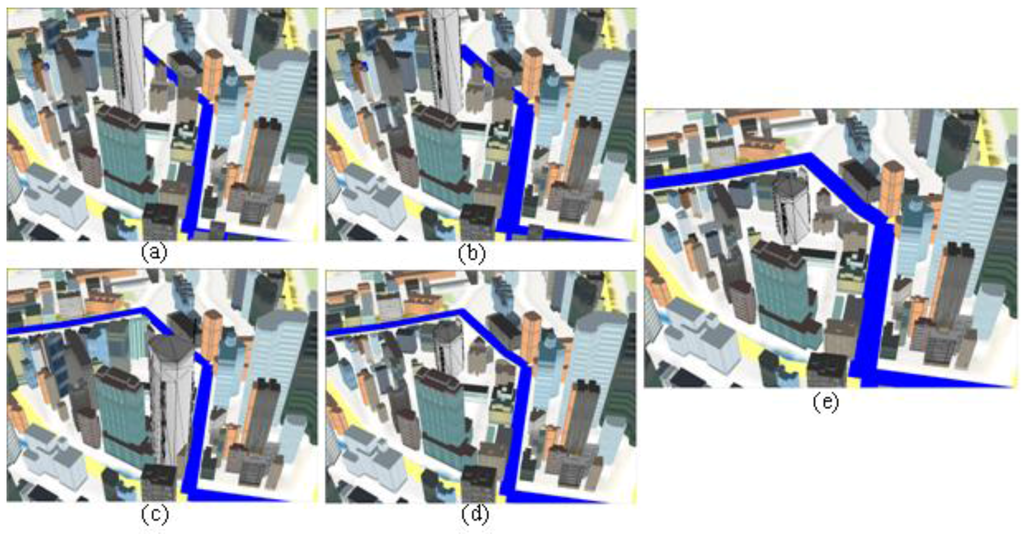
گسترش مسیر: نقشه نگاران معمولاً با هدف تأکید بر مسیرهای مربوطه و بهبود وضوح آنها، جاده را وسعت می دهند. بنابراین، ما مسیر مربوطه را برای تاکید بر آن و تقویت جلوه زیبایی شناختی گسترش می دهیم ( شکل 2 ب).
جابجایی ساختمان: ما اشیاء زمینه FOI را برای حذف انسدادها جابجا می کنیم. الگوی فضایی و مجاورت ساختمان ها باید در طول عملیات جابجایی حفظ شود ( شکل 2 ج). برای حفظ الگوهای توزیع، یک نمودار مجاورت برای نمایش خوشههای ساختمانی در هر بلوک شهری ساخته میشود. این نمودار تمام ساختمان ها را در یک بلوک در طول فرآیند جابجایی ساختمان به هم متصل می کند.
مقیاس بندی ساختمان: مانند جابجایی ساختمان، مقیاس بندی اشیاء زمینه FOI همچنین به حذف انسداد FOI ناشی از اشیاء در پیش زمینه کمک می کند ( شکل 2 د).
هنگامی که تنها یکی از این تکنیک ها به کار گرفته شود، تغییر شکل حاصل از صحنه شهری سه بعدی بزرگ است. در این مقاله، ما یک رویکرد بهینهسازی را پیشنهاد میکنیم که هر سه تکنیک فوق را با استفاده از توابع انرژی ادغام میکند ( شکل 2 e).
3.1. بیان مسأله
مشکل مورد مطالعه در اینجا را می توان به شرح زیر توصیف کرد:
با توجه به یک دیدگاه، تمام اشیاء I 0 در محیط شهری سه بعدی و FOIs F 0 ∈ I 0 ، هدف بدست آوردن اجسام تغییر شکل داده شده I از I 0 و ویژگی های مورد علاقه F از F 0 است که مسئله بهینه سازی محدود را به حداقل می رساند:
که در آن E d ( I , F ) به ترتیب انحراف از I و F به I 0 و F 0 است و E o ( I , F ) انسداد F است .
با توجه به محدودیت های زیر:
اگر E d (I، F) = 0، I = I 0 و اگر E o (I، F) = 0، آنگاه F قابل مشاهده است. بنابراین، راه حل معادله (1) باید نمای بهینه برای به حداقل رساندن اعوجاج ها در عین حفظ دید F باشد.
نماهای بدون انسداد در مختصات دکارتی اجرا می شوند که در آن محور X و Y در صفحه زمین قرار دارند در حالی که محور Z عمود بر صفحه افقی است. علاوه بر این، ساختمان ها را می توان به عنوان ترکیبی از تعدادی جعبه مستطیلی تقریب زد، جاده ها به عنوان نوارهای مستطیلی در نظر گرفته می شوند و مرزهای آنها از چند خط تشکیل شده است. در فرمولبندی ما، فرض میکنیم که همه ویژگیها در یک ارتفاع قرار دارند و زمین جادهها و نقاط دیدنی را مسدود نمیکند. اگر شهری در یک منطقه کوهستانی واقع شده باشد، روش دنگ و همکاران. [ 21] ابتدا برای از بین بردن انسداد FOI های ناشی از زمین به کار می رود. سپس روش ارائه شده در این مقاله برای حذف انسداد FOI ناشی از اشیاء مجاور مانند ساختمان ها اعمال می شود. ما فرمول E d ( I, F ) و E o ( I, F ) را در بخشهای بعدی توضیح میدهیم.
3.2. اپراتورهای انکار
همانطور که در شکل 3 نشان داده شده است ، برای یک نقطه مسیر PR که توسط ساختمان B از دیدگاه V مسدود شده است ، انسداد PR را می توان با جابجایی ساختمان B به B0 و تعریض جاده از بین برد .{PR, PR¯¯¯}{��, ��¯}به موقعیت جدید {P′R, P′R¯¯¯}{�′�, �′�¯}در جهت افقی از آنجایی که به سادگی استفاده از یک یا دو عملگر انسداد برای آشکار کردن هدف مسدود شده باعث ایجاد اعوجاج بزرگتر میشود، برای عدم انسداد هر سه عملگر (یعنی گسترش مسیر، جابجایی ساختمان و مقیاسبندی ساختمان) را ترکیب میکنیم تا اعوجاج را به حداقل برسانیم. جابجایی ساختمان و کاهش مقیاس، که در [ 19 ] وجود ندارد ، برای از بین بردن گرفتگی ها در جهت افقی و عمودی موثر است. رابطه بین حداکثر جابجایی ساختمان ∆ p B و حداکثر جابجایی نقطه جاده برای گشاد شدن ∆ PR¯¯¯��¯و همچنین رابطه بین حداکثر مقداری که ساختمان نیاز به کاهش دارد ( Δh ) و حداکثر تغییر ارتفاع دیدگاه ∆H را می توان از روابط ساده مثلثی مشابه در دو شکل زیر به ترتیب استنتاج کرد:
3.3. اندازه گیری انسداد
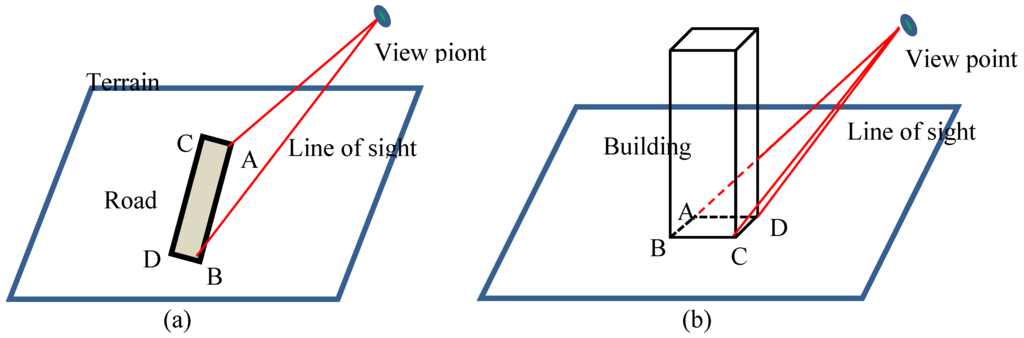
اکثر اشیاء شهری را جاده ها و ساختمان ها تشکیل می دهند. بر اساس انتزاع هندسی فوق، جاده ها را می توان به صورت چندین نوار مستطیل شکل در نظر گرفت. همانطور که در شکل 4 الف نشان داده شده است، دید یک جاده با دید نزدیک ترین بخش به نقطه دید تعیین می شود، یعنی تا زمانی که آن بخش قابل مشاهده است، جاده مربوطه قابل مشاهده است. به طور مشابه، دید ساختمان به دید بخشهای روی ردپای نزدیکترین نقطه به دیدگاه مربوط میشود ( شکل 4 ب). بنابراین، دید هم جاده ها و هم ساختمان ها را می توان به دید بخش ها نسبت داد. در مرحله بعد، ما روی روش اندازه گیری دید یک قطعه در صفحه زمین تمرکز می کنیم.
همانطور که در شکل 5 نشان داده شده است ، قطعه AB روی زمین و نقطه دید V یک مثلث به نام ABV را تشکیل می دهند که یک صفحه بی نهایت نیست. بدیهی است که تمام خطوط دید از V تا قطعه AB متعلق به مثلث ABV است که صفحه دید نامیده می شود. شکل 4 بیشتر وضعیتی را نشان می دهد که در آن قطعه AB توسط یک ساختمان مسدود شده است. ظاهراً تنها در صورتی که صفحه دید و مرز ساختمان دارای تقاطع باشند، جاده باید توسط ساختمان مسدود شود. علاوه بر این، هرچه بخش در لبه بالای صفحه دید طولانی تر باشد، جاده به طور جدی تر توسط ساختمان مسدود می شود. لبه KK “جاده ای که قسمت بالای صفحه دید آن K’T است را به طور جدی مسدود می کند. از این رو. میتوانیم از طول K’T برای اندازهگیری دید قطعه استفاده کنیم. هنگامی که طول K′T = 0، جاده قابل مشاهده است.
ما بردار جابجایی را به صورت T = ( Tx , Ty ) و بردار مقیاس را به صورت S = ( Sx , Sy , Sz ) تعریف می کنیم . از آنجایی که عملیات مقیاس بندی نسبت به مرکز ساختمان است، یعنی S x , S y , S z ∈ [0,1]. پس از جابجایی و بزرگنمایی یک ساختمان، رئوس جدید K’ روی ساختمان را می توان با معادله (4) محاسبه کرد:
جایی که O ( xo , y o , z o ) مرکز ساختمان است، K (xk, y k , z k ) نشان دهنده رئوس روی ردپای ساختمان نزدیکترین به جاده است و KO ( xk 0 ) , y k 0 , z k 0 ) بردار مرکز ساختمان تا رئوس K است .
معادله پارامتری پاره خط K′K به صورت زیر است:
که در آن H i ارتفاع ساختمان i است .
با توجه به دو نقطه انتهایی مسیر مربوطه و دیدگاه V، به راحتی می توان معادله صفحه دید را به دست آورد:
با ترکیب معادلات (5) و (6) به دست می آید:
بنابراین، اصطلاح انسداد را از ساختمان به جاده مربوطه، یعنی طول K′T بدست می آوریم:
سپس محدودیت موجود در رابطه (1) را می توان به صورت زیر بازنویسی کرد:
که در آن n تعداد ساختمان های بلوک شهر است.
برای کاهش تعداد محدودیتها و سادهسازی آنها، مجموعه ساختمان B occ را جستجو میکنیم که FOI را در هر فریم مسدود میکند و این عبارات انسداد را به صفر محدود میکنیم. بنابراین، معادله (9) را می توان به صورت زیر بازنویسی کرد:
3.4. اندازه گیری انحراف
در پایه الگوی فضایی شهری، ما اعوجاج ها را کمی می کنیم تا شباهت بلوک قبل و بعد از بهینه سازی حفظ شود.
3.4.1. استخراج الگوی شهری
روش ژانگ و همکاران [ 12 ] برای استخراج الگوی شهری اتخاذ شده است. برای استخراج الگوی فضایی شهری، طیفی از مقیاسها را از جنبه جهانی تا ویژگیهای محلی در نظر میگیریم. در سطح جهانی، شهر را می توان بر اساس مورفولوژی شهر به مناطق سلسله مراتبی تقسیم کرد [ 22 ]. الگوی توزیع ساختمان ها و همچنین گروه های هم ترازی محلی را در الگو استخراج می کنیم. برای الگوی توزیع، ما یک نمودار مجاورت می سازیم تا خوشه ها و روابط بین ساختمان ها را در هر بلوک نشان دهیم [ 12 ]. برای تراز محلی، گروه های هم ترازی را بر اساس قوانین گشتالت [ 12 ، 23 ] استخراج می کنیم و گروه ها را با نمودار مرتبط می کنیم.
3.4.2. جابجایی و انحراف مقیاس
برای حفظ شباهت فضایی محیط شهری سه بعدی قبل و بعد از بهینهسازی، انحرافات را در نظر گرفته و آنها را به حداقل محدود میکنیم.
- (1)
-
محدودیت جهانی برای موقعیت های نسبی در بین ساختمان های مجاور
موقعیت های فضایی نسبی در میان ساختمان های مجاور باید حفظ شود. اندازههای همه ساختمانها تا حد امکان به طور ثابت کوچکنمایی میشوند. بنابراین، این عبارت انرژی را برای اندازه گیری انحراف نسبی و مقیاس اندازه از بهینه سازی جهانی به دست می آوریم:
که در آن B مجموعه تمام ساختمان ها است و T i و T j به ترتیب بردارهای جابجایی ساختمان های i و j را نشان می دهند . S i و Sj به ترتیب بردارهای مقیاس بندی i و j هستند ، ωt وزن جابجایی ساختمان است و ω s = (ωsx ، ω sy ، ωsz ) وزن های مقیاس را در امتداد محور X نشان می دهد. محور Y و محور Z. در آزمایش خود، ω t = 0.01 و ω s را تنظیم کردیم= (1.2، 1.2، 2.4). ω ij به عنوان وزن در انحراف نسبی از ساختمان های i و j تعریف می شود . به طور کلی، هر چه فاصله بین دو ساختمان بیشتر باشد، مقدار ω ij کمتر است. بنابراین، ما از تابع گرما هسته ای برای نشان دادن وزن متغیر با فاصله استفاده می کنیم:
در جایی که d ij مربع فاصله اقلیدسی بین مراکز ردپای ساختمانهای i و j است ، t ضریب حساسیت برای تنظیم ω ij است که با d ij تغییر میکند و t = 1.0 × 10 6 .
- (2)
-
محدودیت های ساختمان ها در همان بلوک
بر اساس نظریه مورفولوژی شهری [ 24 ] و روانشناسی گشتالت [ 25 ]، مردم اغلب تمایل دارند ساختمان های واقع در یک بلوک را به عنوان یک کل در نظر بگیرند. بنابراین، انحراف نسبی بین ساختمانها در همان بلوک باید محدود شود تا تا حد امکان سازگار باشد:
که در آن K مجموعه همه بلوک ها است و سایر پارامترها همان معنای معادله (11) را دارند.
- (3)
-
محدودیت انحراف ساختمان ها
انحراف ساختمان های تغییر شکل داده شده توسط جابجایی و اندازه پوسته شدن آنها تعیین می شود:
که در آن I =(1.0، 1.0، 1.0) یک بردار واحد است و سایر پارامترها همان معنای معادله (11) را دارند.
- (4)
-
محدودیت جاده
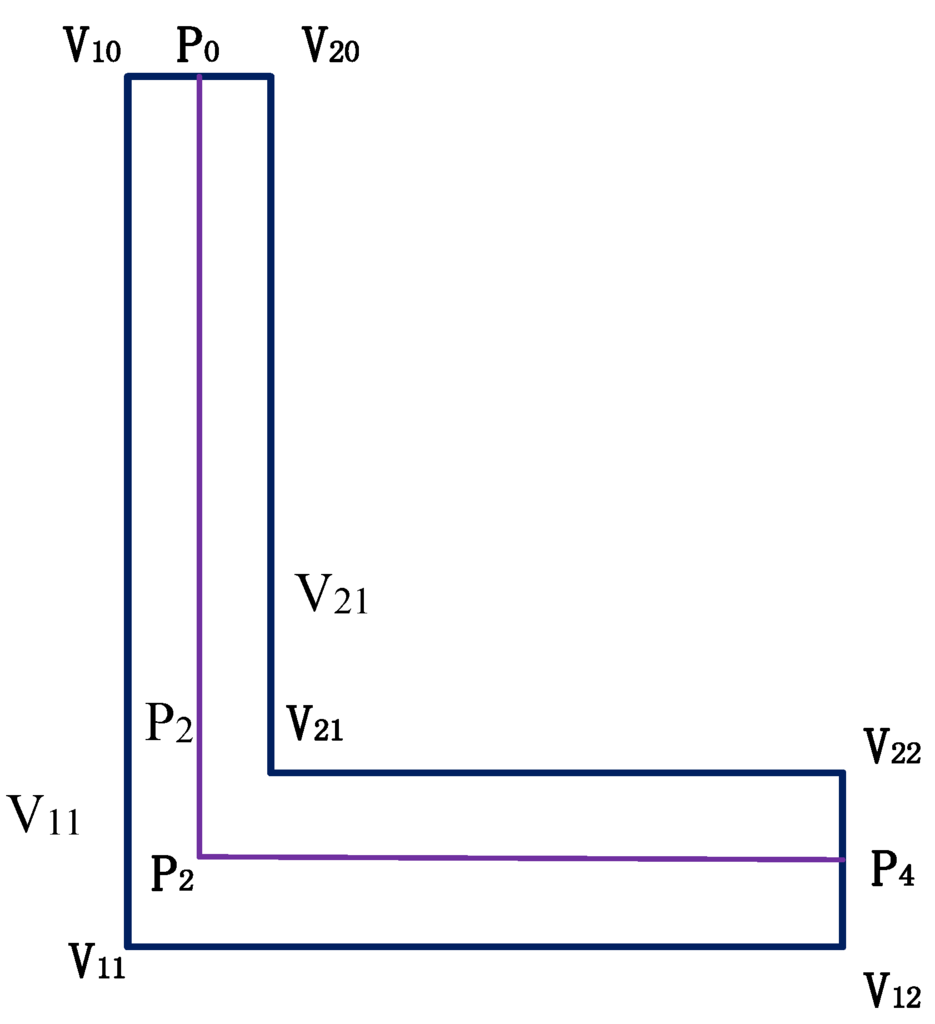
یک جاده را می توان به نوارهای مستطیلی متشکل از رئوس V = { v 10 , v 11 , v 20 , v 21 , …, v n 0 , v n 1 } تقسیم کرد که در دو طرف جاده و همچنین در امتداد محور مرکزی توزیع شده اند. ( شکل 6 ). در زیرنویس راس، بیت اول نشان دهنده شماره سریال جاده است و بیت دوم نشان می دهد که راس در سمت چپ یا راست است. در نتیجه ما داریم:
اگر یکی از بخش های در امتداد محور مرکزی جاده v i v i + 1 باشد ، خطوط موازی با v i v i + 1 معادله (16) را برآورده می کند:
که در آن n i بردار نرمال شده عمود بر v i v i +1 است و c ثابت مربوط به فاصله c تا محور مرکزی است. بدیهی است که بخش های دو طرف این محور مرکزی معادله (17) را برآورده می کند:
انحراف جاده با موقعیت و شکل آن اندازه گیری می شود. انحراف مکان را می توان با مربع فاصله بین مرکز جاده تغییر شکل یافته و جاده اصلی نشان داد:
انحراف شکل شامل درجه عدم تعادل بین بخش جاده و محور مرکزی است:
انحراف شکل شامل تغییر در عرض جاده نیز می شود:
که در آن ω rd ضریب مقیاس عملیات تعریض جاده است. برای جاده های مربوطه، ω rd =1.5 را تعیین می کنیم. در غیر این صورت، ω rd = 1.0.
از معادلات (18) – (20)، عبارت انحراف جاده را به دست می آوریم (معادله (21)):
که در آن E shp وزن دارد ηshp��ℎ�، که برای اطمینان از عدم تغییر شکل جاده روی 10.0 تنظیم شده است.
- (5)
-
محدودیت موقعیت های نسبی بین جاده و ساختمان های اطراف
برای اندازه گیری انحراف از جاده به ساختمان های مجاور، مجموعه را جستجو می کنیم Φ={vi, (vi∙ v(j+1)∙)}�={��, (��• �(�+1)•)}از جمله جاده و ساختمانهای مجاور آن. در اینجا، v i مرکز ردپای ساختمان i است ، و Φ={vi, (vi∙ v(j+1)∙)}�={��, (��• �(�+1)•)}جاده نزدیک i است بنابراین، ما می توانیم انحراف نسبی از جاده و ساختمان های مجاور آن را با رابطه (22) بدست آوریم:
جایی که RJ(vj∙, v(j+1)∙)=(1−t)vj∙+tv(j+1)∙., t∈[0,1]��(��•, �(�+1)•)=(1−�)��•+��(�+1)•., �∈[0,1]نزدیکترین رئوس جاده به ساختمان i هستند .
- (6)
-
انحراف محدودیت های انسجام مکانی و زمانی
انحراف از سازگاری مکانی و زمانی را می توان با انحراف نسبی مکان و اندازه ساختمان بین قاب فعلی و قاب قبلی تعیین کرد. بنابراین، به دست می آوریم:
که در آن T i و S i به ترتیب بردار تغییر مکان و مقیاس ساختمان i هستند . تعاریف ω t و ω s همان است که در رابطه (11) آمده است.
3.5. پیاده سازی
از ساخت اصطلاحات انحراف می توان مشاهده کرد که هر انحراف به صورت درجه دوم قطعی مثبت است. بنابراین، معادله (1) را می توان به صورت زیر بازنویسی کرد:
که در آن G و r به ترتیب ماتریس و بردار انحرافات بلوک شهر هستند که می توانند در طول پیش پردازش ساخته و فاکتور شوند.
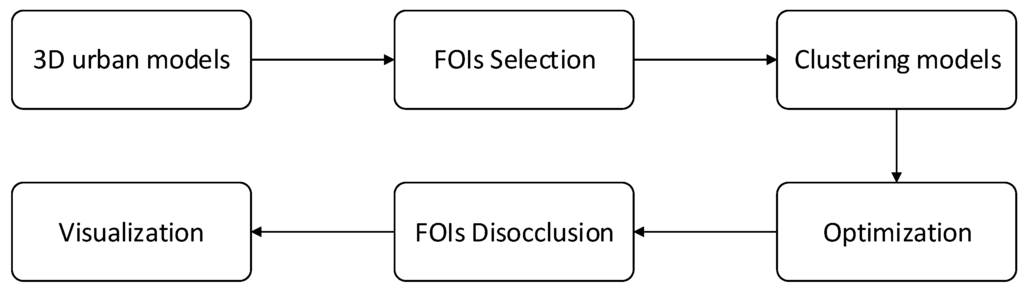
شکل 7 خط لوله طرح تجسم FOI تعاملی ما را نشان می دهد. برای آشکار کردن FOI ها، سیستم الگوی شهری را در طول پیش پردازش استخراج می کند و ماتریس انحراف G را در معادله (24) می سازد. سپس، تجزیه Cholesky [ 26 ] را اجرا می کند. در اولین فریم در حین رندر کردن محیط، سیستم برای بهینه سازی تمام مسیرها و ساختمان های مربوطه، مسئله برنامه ریزی درجه دوم شرح داده شده در معادله (24) را حل می کند. هنگام پیمایش در یک محیط شهری، تعریض پویا جاده مربوطه ممکن است کاربران را گمراه کند. بنابراین، جاده ها بعد از اولین فریم بزرگتر نمی شوند. وقتی رئوس جاده ثابت باشد، متوجه می شویم که Eo خطی است. بنابراین، معادله (24) را می توان به صورت زیر بازنویسی کرد:
اصطلاح انحراف عبارت است از:
راه حل مسئله برنامه نویسی درجه دوم در معادله (25)، که فقط شامل محدودیت های خطی است، به اندازه کافی سریع است که نماهای بدون انسداد در نرخ فریم های تعاملی ایجاد کند.
4. نتایج تجربی
4.1. داده های مطالعه
برای اعتبارسنجی روش پیشنهادی، آن را روی لپتاپی با پردازنده Core i3 با فرکانس 2.30 گیگاهرتز با 2 گیگابایت رم اجرا کردیم. سپس این روش بر روی دو مجموعه داده واقعی شهری آزمایش شد. یکی منطقه ای از جزیره هنگ کنگ و دیگری کل شبه جزیره مرکز شهر ونکوور است. در کل، 1017 ساختمان در داده های شهر هنگ کنگ وجود دارد. هنگ کنگ با ساختمان های بلند در کنار جاده ها پرجمعیت است. کوتاه ترین ساختمان 48.3 متر ارتفاع دارد و بلندترین آن 374 متر است. ساختمان های مرکز شهر ونکوور با ارتفاع متوسط 28.8 متر پایین تر هستند. بلندترین ساختمان در ونکوور 170 متر است، اما مقیاس صحنه شهری بسیار بزرگتر از صحنه هنگ کنگ است. شامل 1643 ساختمان است. در دو صحنه شهری که در بالا توضیح داده شد، مسیرها و نشانه های مربوطه اغلب مسدود می شوند. از دید چشم پرنده، برخی از مکان های دیدنی کوچک هستند،
4.2. نتیجه
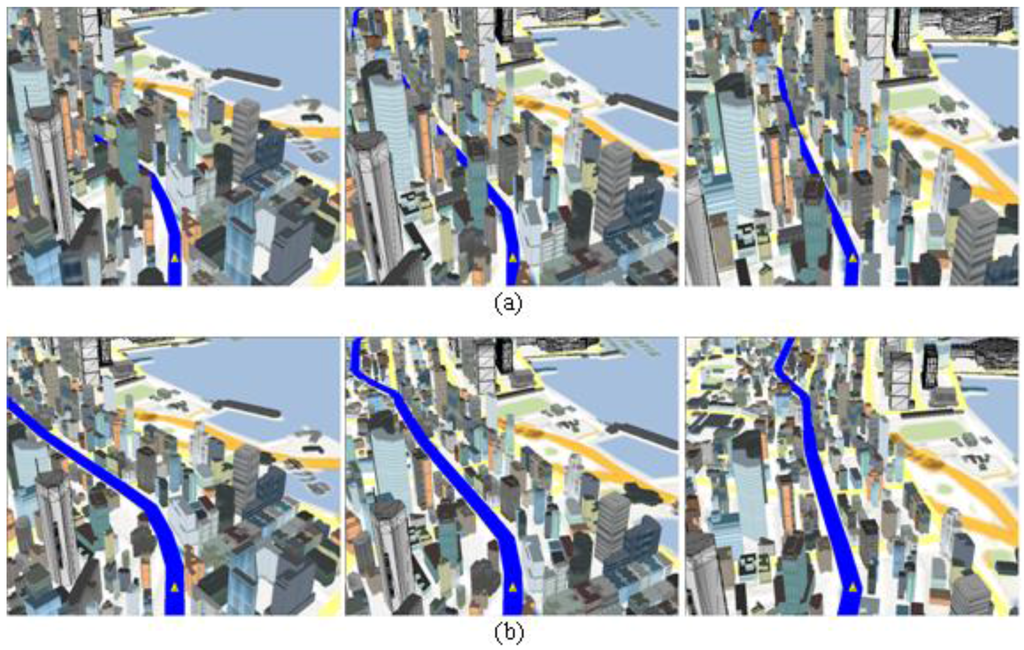
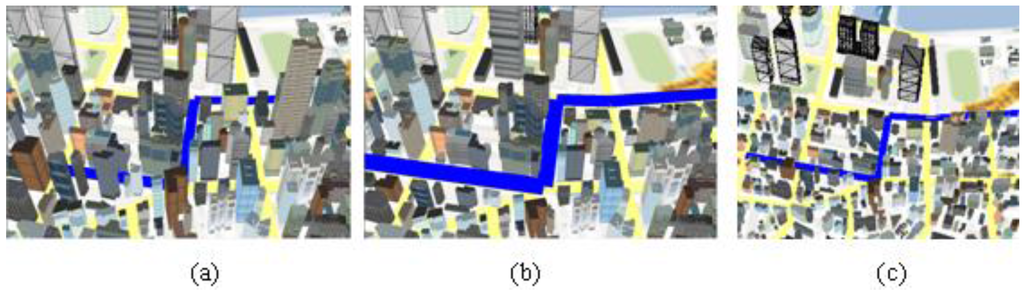
در نماهای سه بعدی سنتی، زمانی که کاربران مسیر مربوطه خود را مسدود میبینند، میتوانند زاویه دید را به زاویه دیگری تنظیم کنند یا برای پاک کردن انسداد، زاویه دید را بالا ببرند. شکل 8 a یک مسیر z شکل در صحنه هنگ کنگ را نشان می دهد که توسط ساختمان های اطراف مسدود شده است. شکل 8 ج یک منظره سه بعدی را نشان می دهد که از منظر بسیار بالا مشاهده می شود. کنترل این نما نه تنها دشوار است بلکه باعث تضعیف اثر پرسپکتیو و از دست دادن بافت فضایی محیط شهری می شود. بدون تغییر دیدگاه، روش ما با ادغام جابجایی ساختمان و مقیاسبندی با گسترش مسیر مربوطه از طریق چارچوب بهینهسازی، انسداد را از بین میبرد. همانطور که در شکل 8 نشان داده شده استب، به نظر می رسد که روش ما انسداد را از ساختمان ها به طور موثر حذف می کند و در عین حال شباهت فضایی خوبی را با نمای اصلی حفظ می کند.
انسدادهای جدی اغلب در برخی از تقاطع ها ظاهر می شوند. شکل 9 a یک جاده افقی را نشان می دهد که با بسیاری از جاده های عمودی در تعامل است. بخش های تقاطع جاده ها به طور جدی مسدود شده است. در نمای بدون انسداد ما ( شکل 9 ب)، تقاطع ها کاملاً قابل مشاهده هستند. هنگام پیمایش در یک شهر، کاربران می توانند اطلاعات فضایی بیشتری را در مورد چهارراه درک کنند و بنابراین، سفر خود را از قبل برنامه ریزی کنند.
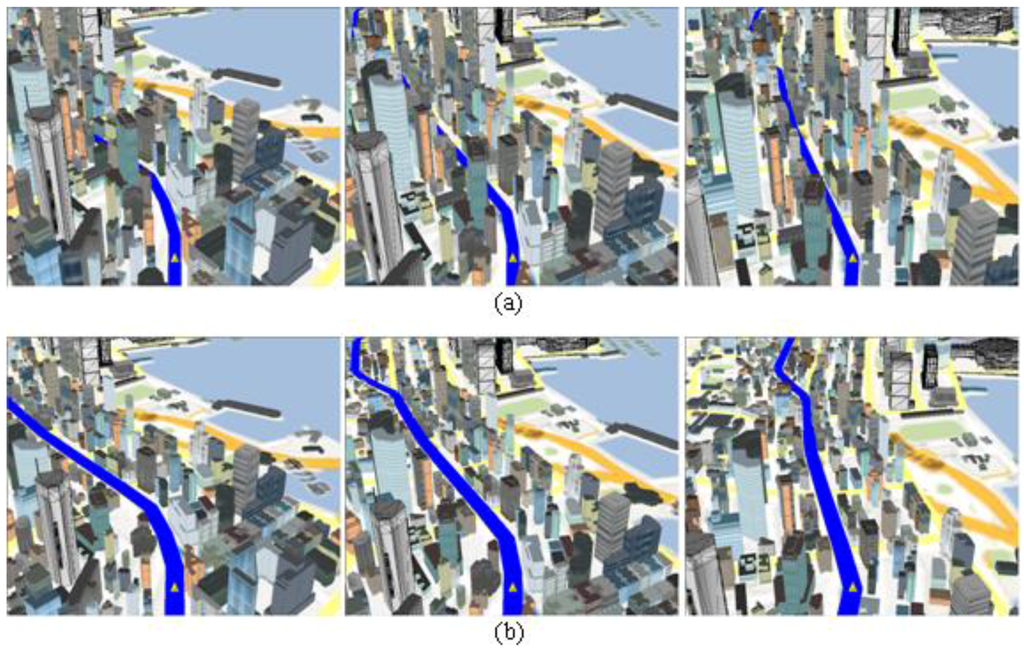
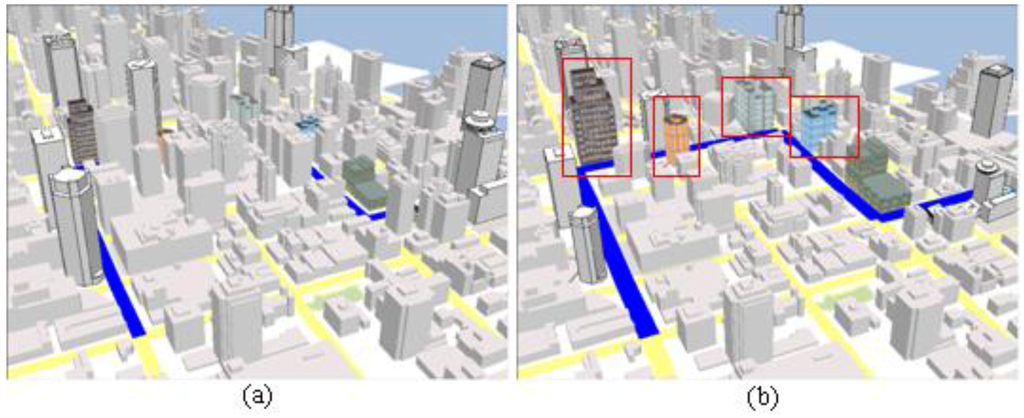
یک نمای ناوبری سهبعدی مؤثر باید نمایشهای بصری غنی از FOI ارائه دهد تا به کاربران کمک کند مکانهای خود را سریع شناسایی کرده و مرتبطترین مسیر را به مقصد خود تعیین کنند. در شکل 10 a، مسیر مربوطه (به رنگ آبی) و نشانه های مرتبط (با بافت) توسط ساختمان های اطراف مسدود شده اند، در حالی که شکل 10b نمای بدون انسداد ایجاد شده را نشان می دهد. مسیر مربوطه و نشانههای مرتبط با آن بدون انسداد قابل مشاهده هستند در حالی که روابط فضایی قبل و بعد از تغییر شکل حفظ میشوند. نماهای سه بعدی ایجاد شده توسط روش ما به کاربران دید کلی خوبی از شهر می دهد. در همین حال، کل مسیر و همچنین نشانه های مرتبط با آن قابل مشاهده هستند. بنابراین، روش ما خوانایی نقشههای شهری سهبعدی را افزایش میدهد و بر FOI در صحنه تأکید میکند و در عین حال تغییر شکلهای سایر قسمتها را به حداقل میرساند.
موضوع مهم دیگری که باید تایید شود این است که رویکرد باید انسجام مکانی-زمانی صحنه شهری سه بعدی را در طول انیمیشن حفظ کند. در دو ویدیوی تکمیلی، هیچ “پرش” بین فریم ها وجود ندارد. آنها در طول زمان صاف هستند. در مورد انسجام فضایی، نمای تحریف شده اغلب توهمات طبیعی اشکال سه بعدی را ایجاد می کند زیرا روابط موازی بین یک جفت ویژگی خط به طور کامل حفظ می شود. در مورد انسجام زمانی، رویکرد پیشنهادی میتواند به طور کامل اثرات ارتعاش محلی را در طول ناوبری حذف کند. با این حال، در برخی شرایط شدید (به عنوان مثال، یک ساختمان بسیار بلند بسیار نزدیک به جاده مربوطه است یا یک ساختمان بسیار بلند توسط مسیر مربوطه احاطه شده است)، ساختمان ممکن است بیش از حد مقیاس شود و در نتیجه خیلی کوچک به نظر برسد.شکل 11a تعدادی ساختمان (مستطیل قرمز) را نشان می دهد که توسط شبکه جاده ای مربوطه احاطه شده اند. برای آشکار ساختن جاده های اطراف، این ساختمان ها بیش از حد مقیاس بندی شده اند ( شکل 11 ب).
این آزمایش نتایج کمی را برای فرآیندهای تجسم ارائه کرد. با رابطه (25) نشان می دهد که حداکثر فاصله جابجایی کمتر از 20 متر است. ما توجه می کنیم که حداکثر مقیاس بندی در امتداد محور Z معمولاً بزرگتر از مقیاس در امتداد محورهای X و Y است. این به این دلیل رخ می دهد که پوسته پوسته شدن در امتداد محور Z یک راه کارآمد برای کاهش انسداد است. در این مثال ها، از مقادیر پارامترهای از پیش تعریف شده معرفی شده در بخش 3 استفاده می کنیم . با این حال، کاربران می توانند آنها را برای به دست آوردن نتایج ارجح تر تنظیم کنند. این تنظیم در بخش 5 معرفی خواهد شد .
برای انعکاس بهتر تأثیر کلی روش ارائه شده، ما نتایج کمی سه عملگر انسداد ( جدول 1 ) و نتایج آماری اندازهگیری انسداد و اندازهگیری انحراف اعمال شده بر روی صحنههای سه بعدی مختلف را ارائه میکنیم ( جدول 2 ).
4.3. کارایی
کارایی رویکرد ما به اندازه شهر و تعداد ساختمانهایی که FOI را مسدود میکنند بستگی دارد. اندازه شهر ابعاد مسئله برنامه ریزی درجه دوم را تعیین می کند، در حالی که تعداد ساختمان های مسدود شده تعداد محدودیت ها را تعیین می کند. در دو صحنه شهری نشان داده شده در بالا، نماها در ارتفاع 500 متری با زاویه دید 30 درجه نگه داشته شدند و تعداد ساختمان های ارائه شده در منطقه هنگ کنگ و ونکوور به ترتیب 1017 و 1643 است. جدول 3 نتایج آماری را نشان می دهد.
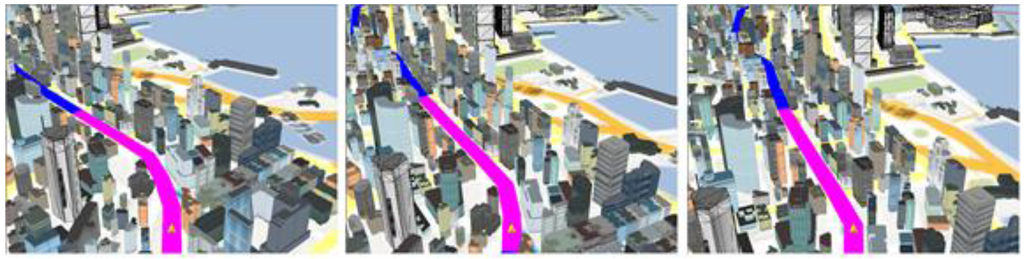
از جانب جدول 2، می توان اشاره کرد که وقتی FOI های بیشتری انتخاب می شوند، عملکرد به طور طبیعی کاهش می یابد – در درجه اول به دلیل محدودیت های اضافی وارد شده به بهینه سازی. با این حال، سیستم ما همچنان میتواند بین 10.1 تا 5.4 فریم در ثانیه (fps) در هنگکنگ دست یابد و در عین حال جادههای پیچیده مربوطه را مسدود کند. برای تسریع سرعت رندر محیط شهری سه بعدی بدون انسداد، مسیرهای مرتبط طولانیتر به چندین بخش تقسیم میشوند (مثلاً برای یک برنامه ناوبری خودرو). ما فقط انسداد را در بخش فعلی که خودرو در حال حرکت است و چندین بخش بعدی حذف می کنیم، اما انسداد را در بقیه بخش ها نادیده می گیریم. آزمایشها نشان میدهند که با تقسیم مسیرهای طولانی، تکنیک ما میتواند به نرخ فریم در محیط هنگکنگ 9.3-15.6 فریم در ثانیه دست یابد، در حالی که در محیط بزرگتر ونکوور، میتواند به 6.8-14.8 فریم در ثانیه دست یابد.شکل 12 نتیجه به دست آمده با استفاده از این تکنیک تجزیه را برای پردازش مسیر مربوطه نشان داده شده در شکل 1 ب نشان می دهد. در مقایسه با شکل 1 ب، دید کل مسیر در شکل 11 کاهش یافته است، اما بخش های مسیر (که با رنگ صورتی مشخص شده اند) که ماشین به سمت آنها حرکت می کند (نشان داده شده در نقطه) از هم جدا شده است (و در عین حال، نرخ فریم افزایش می یابد).
4.4. تنظیم وزن
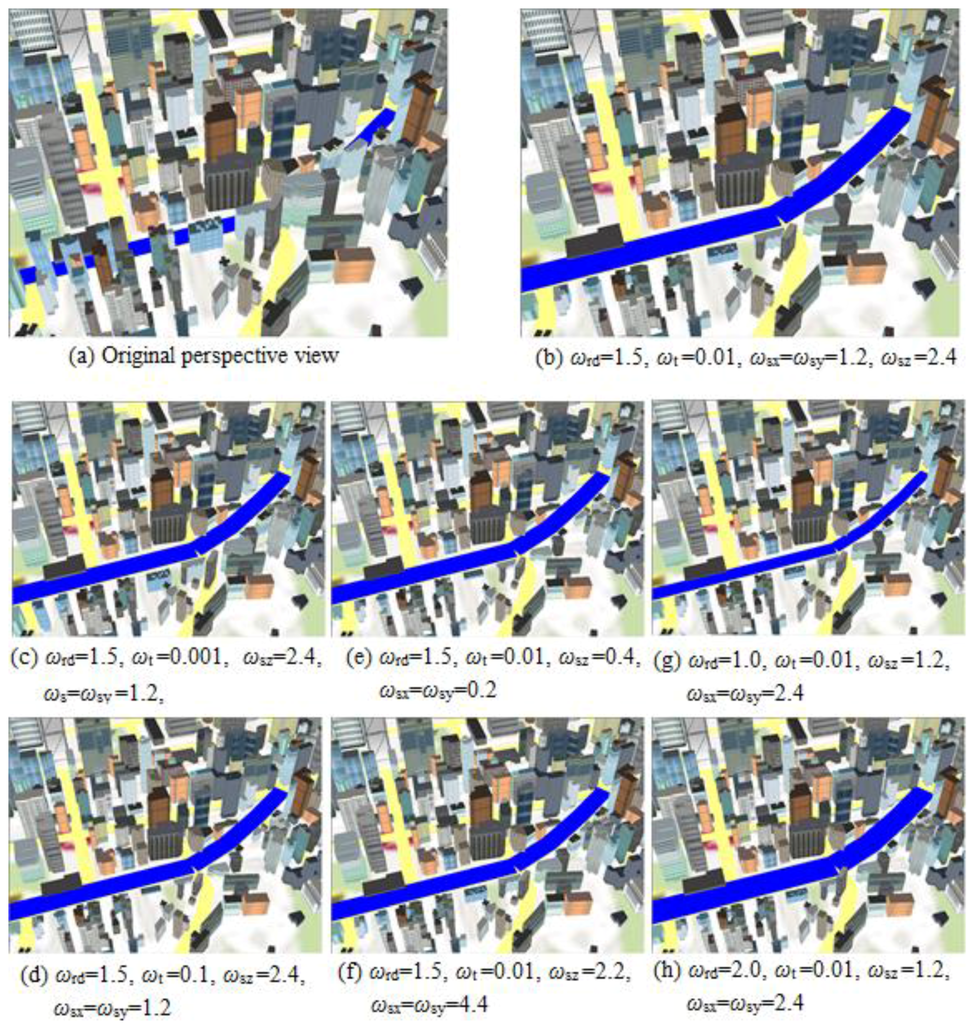
در روش ما، سه پارامتر وزنی وجود دارد که ارتباط نزدیکی با تغییر شکل دارند، یعنی ضریب مقیاس جاده ω rd ، وزن جابجایی ساختمان ω t و وزن مقیاس ω s = (ω sx , ω sy , ω sz ). اگرچه ما مقادیر توصیه شده را ارائه کرده ایم، کاربران ممکن است بخواهند خودشان این پارامترها را تغییر دهند. در اکثر محیط های شهری سه بعدی، ω را تنظیم می کنیم sx = ω sy = ω، ω sz = 2ω را تنظیم می کنیم، در حالی که ω rd ، ω t و ω می توانند توسط کاربران تنظیم شوند. روش ما به آنها اجازه می دهد ω rd را قبل از ناوبری تنظیم کنند و ω t را تنظیم کنندو ω در طول ناوبری. شکل 13 نماهایی را با مقادیر مختلف ω rd , ω t و ω s نشان می دهد. تنظیم وزنها میتواند مسیر و نشانههای مرتبط با آن را با اعوجاج کم نشان دهد و در عین حال اشیاء اطراف را حفظ کند تا یک نمای کلی خوب ارائه دهد.
5. مطالعه کاربر
ما روش خود را با انجام یک مطالعه کاربر با 27 آزمودنی با سنین مختلف (از 19 تا 31)، جنسیت (9 زن) و پیشینه (از تخصصهای علوم کامپیوتر و ژئوانفورماتیک) ارزیابی کردیم. وظیفه آزمودنی ها تطبیق یک مسیر با یک نقشه دو بعدی با استفاده از نماهای پرسپکتیو معمولی (CP)، نماهای سه بعدی بدون انسداد (OF) ما، یا نماهای فوکوس + زمینه (FC) است که مشابه ارزیابی است. وظیفه ارائه شده توسط روزن و پوپسکو [ 8]. قبل از آزمون، به آزمودنی ها سه نوع نما بدون هیچ دستورالعمل یا پیشنهاد فنی خاصی نشان داده شد و ده دقیقه فرصت داده شد تا با سیستم ما آشنا شوند. یک مسیر با چرخش های متعدد به عنوان FOI تنظیم می شود و دیدگاه در موقعیتی تنظیم می شود که FOI تا حدی مسدود شده است. در آزمون، آزمودنی باید دوربین را برای جهت یابی و ردیابی مسیر حرکت دهد. سپس، آنها باید آن را بر روی نقشه دو بعدی که به طور همزمان در صفحه دیگر نمایش داده می شود، علامت گذاری کنند. برای هر موضوع، شش نمونه مختلف در مجموعه داده های هنگ کنگ و ونکوور (سه مثال برای هر کدام) مورد آزمایش قرار گرفتند که در آن هر نوع دیدگاه در دو نمونه به طور تصادفی ظاهر شد. برای هر مثال، کل زمان صرف شده سوژه و دقت علامتی که کاربر ایجاد کرده بود را ثبت کردیم. در مجموع، 27 × 6 = 162 رکورد به دست آوردیم.
جدول 4 میانگین زمان بندی به دست آمده را خلاصه می کند. به طور متوسط، نماهای OF ما باعث بهبود سرعت 96.8 درصدی در مقایسه با نماهای CP و 29.9 درصد بهبود سرعت در مقایسه با نماهای FC شده است. با توجه به صحت 27 × 2 = 54 مورد برای هر نوع نمایش، آزمودنی ها به درستی FOI ها را در نقشه های دو بعدی در 88.9٪ (48/54) موارد با استفاده از نماهای OF علامت گذاری کردند، در حالی که 83.3٪ (45/54) ) برای بازدیدهای FC و 79.6٪ (43/54) برای بازدیدهای CP.
پس از تکمیل تکالیف، آزمودنیها با ارائه رتبهبندی در مقیاس 1 (اصلا مفید نیست) تا 5 (بسیار مفید) در مورد اینکه کدام نوع دیدگاهها برای این کار مناسبتر هستند، بررسی شدند. میانگین امتیازات برای بازدیدهای OF 4.6، برای نماهای FC 3.7 و برای بازدیدهای CP 2.8 بود. علاوه بر این، از آزمودنیها پرسیده شد که آیا اعوجاج در نماهای OF و FC کاربران را گمراه میکند، همچنین در مقیاس 1 (بسیار گمراهکننده) تا 5 (اصلاً نه) رتبهبندی شدهاند. در نتایج، دیدگاههای OF (به طور متوسط 4.3) در مقایسه با نماهای FC (به طور متوسط 4.8) کمی گمراهکنندهتر بودند. به طور کلی، نتایج و بازخورد ترجیح واضح بیننده را برای روش ما نشان می دهد.
6. نتیجه گیری
این مقاله یک ناوبری تعاملی بدون انسداد از FOIs در محیطهای پیچیده شهری سه بعدی را پیشنهاد میکند. یک برنامه درجه دوم قطعی مثبت برای بهینهسازی تابع انرژی استفاده میشود که تعریض مسیر را با تکنیکهای جابجایی ساختمان و مقیاسبندی ساختمان ترکیب میکند تا FOI قابل مشاهده باشد. با توجه به توزیع فضایی شهری، روش ما شباهت فضایی محیط شهری را قبل و بعد از تغییر شکل حفظ میکند. مجموعه ای از اصطلاحات انرژی طراحی شده، سازگاری الگوهای فضایی در بلوک های شهری را در طول حذف انسداد حفظ می کند و برنامه درجه دوم قطعی مثبت، با تجزیه و محاسبه ماتریس انحراف الگوی فضایی بلوک از قبل، مسائل بهینه سازی را به سرعت حل می کند. نماهای بدون انسداد ایجاد شده برای FOI ها را می توان با نرخ فریم تعاملی تجسم کرد. بنابراین، آنها برای برنامه های کاربردی در سیستم های ناوبری خودرو و برنامه های خدمات مبتنی بر مکان مناسب هستند.
در برخی موارد شدید ( برای مثال به شکل 10 مراجعه کنید) که در آن مسیر بسیار پیچیده است، ساختمان ها گاهی اوقات بیش از حد مقیاس می شوند که باعث تغییر شکل بزرگ می شود. با توجه به محدودیتهای فوق، تحقیقات آینده بر افزایش سرعت فریمها تمرکز خواهند کرد. ما با استفاده از سادهسازیهای شهری، مانند روشهای Glander و همکاران، به این امر دست خواهیم یافت. [ 15 ] و ژانگ و همکاران. [ 8 ]. در کار آینده، ما فرآیند تبدیل را مستقیماً در GPU [ 27 ] برای بهبود نرخ فریم سیستم خود اجرا خواهیم کرد.







بدون نظر