

خلاصه
نظارت بر رشد شهری و اندازه گیری پراکندگی شهری برای بهبود برنامه ریزی و توسعه شهری ضروری است. در این مقاله، ما یک رویکرد نظارت شده برای ترسیم مناطق شهری با استفاده از داده های توپوگرافی معمولی و نرم افزار تجاری GIS معرفی می کنیم. این روش از یک رویکرد بهینهسازی پارامتر نظارت شده همراه با روش اندازهگیری کیفیت مبتنی بر بافر استفاده میکند. این رویکرد از نظر کاربرد احتمالی در نظارت بر مناطق ساخته شده در علوم فضایی در سطح بسیار دقیقی توسعه یافته، آزمایش و ارزیابی شد. نتایج نشان می دهد که مرزهای منطقه ساخته شده را می توان به طور خودکار با کیفیت بالاتر در مقایسه با مرزهای سکونتگاهی که واقعاً استفاده می شود ترسیم کرد. این رویکرد برای 166 شهرک سازی در آلمان اعمال شده است. این مطالعه یک روش بسیار کارآمد برای استخراج مرزهای سکونتگاهی از دادههای توپوگرافی و نقشهها را نشان میدهد و به کمیسازی و نظارت بر پراکندگی شهری کمک میکند. علاوه بر این، یافته های این مطالعه به طور بالقوه می تواند سیاست گذاران و برنامه ریزان شهری دیگر کشورها را راهنمایی کند.
کلید واژه ها:
مرز سکونت ; نظارت بر برداشت زمین ; اتوماسیون ؛ GIS _ برنامه ریزی فضایی
1. معرفی
مدیریت پایدار زمین یکی از اصول راهنمای برنامه ریزی فضایی است. زمین یکی از مهم ترین منابع برای تفریح و همچنین تولید غذا و خوراک و همچنین انرژی زیستی یا زیست توده و تعدادی دیگر از خدمات اکوسیستمی است. با این وجود، حومه نشینی منجر به تصرف مداوم زمین و گسترش شهری مرتبط با آن می شود. عوارض جانبی منفی پراکندگی شهری، به عنوان مثال، از بین رفتن خاک های با ارزش، هزینه های زیرساختی بالاتر و افزایش ترافیک است.
بنابراین، کمی سازی، نظارت و ارزیابی تغییرات کاربری زمین از جمله تأثیر آنها به منظور توسعه اهداف سیاست [ 1 ] و ارزیابی تأثیر ابزارهای برنامه ریزی [ 2 ] مهم است. در کشورهای اروپایی، اهداف کمی متفاوت برای کاهش مصرف زمین اجرا می شود [ 3 ]. به عنوان مثال، آلمان قصد دارد میزان مصرف روزانه زمین را به 30 هکتار در روز کاهش دهد، در حالی که بریتانیای کبیر هدف تعیین کرده است که 60 درصد از مسکن های جدید باید در زمین های قهوه ای باشد.
برای تعیین کمیت تصاحب زمین، مرزهای هندسی سکونتگاه ها کاملا ضروری است. با این حال، تعریف مرز شهرک اغلب دشوار است. به خصوص در مناطق روستایی، مرزهای بین منطقه ساخته شده و فضای باز اغلب مبهم است. بنابراین، تعیین مرزهای سکونتگاهی یک چالش رایج در نظارت بر توسعه شهری و اندازه گیری پراکندگی شهری است. مرز، مرز بین منطقه ساخته شده (سکونتگاه های شهری و روستایی) و فضای باز را مشخص می کند. با این حال، این هندسه برای کاربردهای دیگر مانند تجسم، ناوبری، تعمیم، نقشه برداری جمعیت و غیره نیز مهم است.
چندین گروه از محققان بر روی روشی برای تعیین خودکار مرزهای سکونتگاه کار کرده اند. ژو [ 4 ] مروری بر رویکردهای مختلف با دادههای مختلف مورد استفاده (به عنوان مثال، دادههای سرشماری، دادههای سنجش از راه دور، دادههای شهرکسازی و ساختمان، دادههای شبکه جادهای یا اطلاعات جغرافیایی داوطلبانه) ارائه میدهد. رویکردهای مبتنی بر تصاویر سنجش از دور بسیار محبوب هستند زیرا این فناوری روشی کارآمد برای نقشهبرداری از تجمعات شهری با رشد سریع ارائه میدهد. بسیاری از رویکردها بر اساس روش های طبقه بندی با استفاده از اطلاعات طیفی از داده های ماهواره ای [ 5 ، 6 ، 7 ] است. رویکردهای جدیدتر دادههای نور شب را تحلیل میکنند [ 8]. بر خلاف روشهای مبتنی بر شطرنجی، رویکردهایی نیز پیشنهاد شدهاند که هدف آنها تجمیع دادههای برداری است. والتر [ 9 ] تراکم و طرح شبکههای جادهای را برای تعریف مرزهای سکونتگاه تحلیل میکند. ژو [ 4 ] رویکردهای مبتنی بر تراکم، تقاطع محور و مبتنی بر بلوک خیابان را برای ترسیم مناطق ساخته شده بر اساس شبکه های جاده ای ارزیابی می کند. برخی دیگر ساختمان ها را در گروه ها یا بخش هایی از سکونتگاه جمع می کنند. Hangouët [ 10 ] بر گروه بندی ساختمان ها در امتداد جاده ها با استفاده از چند ضلعی های تیسن و داده های ساختاری تمرکز دارد. Regnauld [ 11 ، 12 ] از نمودارهای درخت پوشا و نزدیکی حداقل برای تایپ سازی استفاده می کند. سپس ساختار آنها را مطابق با معیارهای نظریه گشتالت توسط ورتایمر تحلیل می کند [ 13].]. ورتایمر «اصول گروهبندی» را مانند مجاورت، شباهت، بسته بودن، تداوم یا سرنوشت مشترک تعریف میکند. Boffet و Serra [ 14 ] فاصله ها را در شهرک ها از طریق استفاده از بافرهای ساختمان تشخیص می دهند. سپس، آنها از الگوریتم توسعه یافته توسط Regnauld [ 11 ] برای تشکیل گروههایی از ساختمانها و تنظیم آنها در رابطه با فضاهای آزاد شناساییشده استفاده میکنند. با شروع از محورهای جاده، کریستوف و رواس [ 15 ] خطوط عمودی را از طریق مراکز ردپای ساختمان ایجاد می کنند. به دنبال آن، معیارهای ادراکی مانند مجاورت، شکل، اندازه و جهت گیری برای استخراج ترازهای ساختمان استفاده شد. Yan، Weibel و Yang از یک رویکرد چند پارامتری برای ساختمان های گروهی استفاده می کنند [ 16]. تنها کار تحقیقاتی اندکی تعمیم ردپای ساختمان را برای ترسیم کل مرزهای سکونتگاه بررسی کرده است. لی و همکاران [ 17 ] همچنین ساختمانها را گروهبندی میکنند، اما آنها این گروهها را در چند مرحله ادغام و تعمیم میدهند تا زمانی که به یک طرح کلی از سکونتگاه تقلیل پیدا کنند. آنها همچنین از چند ضلعی های تیسن و قواعد نظریه گشتالت استفاده می کنند. Chaudhry و Mackaness [ 18] مرزهای سکونتگاهی را با رویکرد چند مرحله ای مستقیماً از ردپاهای ساختمان ایجاد کنید. آنها از شاخص شهرنشینی برای تعیین میزان بافر یک ساختمان استفاده می کنند. ساختمان ها که اکنون با هم همپوشانی دارند، بسته به اندازه آنها در یک هندسه و شکاف جمع می شوند. سنگدانه های کوچک حذف می شوند. هندسه حاصل برای انتخاب ردپای ساختمان از مجموعه داده های ورودی برای ترسیم سکونتگاه ها استفاده می شود.
ترسیم یک سکونتگاه ممکن است بسته به کاربرد اساسی از نظر شکل بسیار متفاوت باشد. رویکرد پیشنهادی ارائه شده در این مقاله با هدف ویژه حمایت از نظارت بر تصرف زمین و گسترش شهری در آلمان انجام شده است.
2. تعریف مسئله
در سال 2002، دولت فدرال آلمان اولین استراتژی پایداری خود را با عنوان “چشم انداز آلمان” اتخاذ کرد [ 19 ]. یکی از اهداف استراتژیک کاهش نرخ تبدیل کاربریهای غیر شهری به شهری از 130 هکتار در روز در سال 2000 به 30 هکتار در روز در سال 2020 است. هدف خود را برای دستیابی به زمین صفر تا سال 2050 تعیین می کند [ 20]. برای دستیابی به چنین هدف سیاستی، راهبردهایی برای توسعه هدفمند مناطق درونی شهرها و شهرک ها تدوین شده است. توسعهها باید در مناطق داخلی (توسعه پرکننده) بهعنوان اولویت صورت گیرد و نه در منطقه بیرونی (توسعه میدان سبز) که در آن تأمین زیرساختهای عمومی فنی و محلی قبلاً تأمین نشده است. از این رو، دولت فدرال [ 19 ] نسبت 3:1 را برای توسعه infill به توسعه گرین فیلد تعریف کرد. از سوی دیگر، رویکردهای موثر برای تعیین کمیت تصاحب زمین و گسترش شهری مورد نیاز است [ 21 ]. مرزهای سکونتگاهی که به طور خودکار از داده های توپوگرافی ایجاد می شوند، می توانند به چالش اندازه گیری زمین با وضوح بالا کمک کنند.
برخلاف § 35 قانون ساختمان فدرال آلمان (BauGB)، که در آن منطقه بیرونی فراتر از مرزهای شهر یا متعلق به خود تعریف شده است، هیچ تعریف روشنی از منطقه داخلی وجود ندارد. در § 34 BauGB، محدودیتی وجود دارد که بر اساس آن اجازه توسعه پروژه های ساختمانی جدید فراتر از طرح های الزام آور قانونی استفاده از زمین را دارد. این یکی به طور کلی به عنوان منطقه داخلی یا منطقه ساخت یک سکونتگاه با برخی محدودیت های خاص شناخته می شود. بنابراین، برای مثال، یک منطقه باید الگوی توسعه مرتبط را نشان دهد و به عنوان بخشی از یک جامعه قابل تشخیص باشد [ 22 ] (§ 34 Rn 2-6) یا ساختمان ها باید به عنوان محل زندگی طولانی مدت برای مردم مناسب باشند [23 ]] (§ 34 Rn 7) بخشی از ناحیه داخلی باشد. هدف آن رشد ارگانیک سکونتگاه ها و جلوگیری از گسترش شهری است.
با این حال، تعیین دقیق همیشه یک تصمیم فردی در عمل برنامه ریزی است. به منظور ارزیابی عینی اهداف سیاست ملی و اروپایی، یک تعریف مشترک از مناطق داخلی (مناطق ساخته شده) ضروری است. در آلمان، هیچ داده ای در سطح کشور در مورد مناطق داخلی موجود وجود ندارد. در چندین پروژه تحقیقاتی، یک هندسه سکونتگاهی به نام «Ortslage» که ممکن است به عنوان «جسم سکونت» ترجمه شود، از مدل منظر دیجیتالی از سیستم اطلاعات توپوگرافی-کارتوگرافی معتبر (ATKIS® Base DLM) [24] (ص. 35) گرفته شده است . ، [ 25] (ص 9). این هندسه علاوه بر مناطق مسکونی، مناطق صنعتی و تجاری، مناطق با کاربری مختلط و مناطق با ویژگی های عملکردی خاص، همچنین مناطق ترافیکی، بدنه های آبی، مناطق اشغال شده توسط ساختمان ها و سایر امکانات برای تفریح، ورزش و فعالیت های اوقات فراغت را نیز در بر می گیرد. به عنوان مناطق پوشش گیاهی با ارتباط فضایی و عملکردی نزدیک [ 26 ]. با تفسیر بسیار گسترده از سکونتگاه های تحت “Ortslage”، این فقط یک تقریب بسیار تقریبی برای مناطق داخلی است، همانطور که در شیلر و همکاران مورد بحث قرار گرفت. [ 27 ].
از سوی دیگر، در سالهای اخیر، الگوریتمهای متعددی برای تعیین خودکار مناطق ساختهشده در زمینه تعمیم نقشهکشی توسعه داده شده است. ترسیم مناطق ساخته شده در درجه اول در نقشه های توپوگرافی استفاده می شود که به دلیل مقیاس های کوچک، نمایش ساختمان های منفرد دیگر امکان پذیر نیست [ 18 ]. یک مثال ابزار “Delineate Built-Up Areas” است که در ArcGIS برای دسکتاپ (نسخه 10.2 و بالاتر) پیاده سازی شده است [ 28]]. با این حال، کاربرد آن هنوز در چارچوب اهداف نظارت مورد مطالعه قرار نگرفته است. این منجر به این سؤال می شود که آیا چنین ابزارهای تعمیم استاندارد می توانند به طور خودکار مناطق داخلی را با دقت معقول مشخص کنند؟ بنابراین، این مقاله جنبه های مختلف پارامترسازی، دقت های قابل دستیابی و خطاهای مرتبط را بررسی می کند. علاوه بر این، ما سعی میکنیم روشن کنیم که آیا ترسیم نشست خودکار با استفاده از دادههای توپوگرافی معمولی در دسترس بهتر از هندسه «Ortslage» اغلب استفادهشده از ATKIS ® Base DLM است یا خیر.
3. روش
بخش زیر مروری کوتاه بر رویکرد و همچنین توضیحات مفصل در مورد بخش های اصلی ارائه می دهد.
3.1. جریان کار
شکل 1 نشان می دهد که چگونه بخش های فرآیند جداگانه با یکدیگر جفت می شوند. در مرحله اول، پارتیشنهای نقشهکشی منطقه مورد مطالعه بر اساس ردپای ساختمان ایجاد میشوند. این پارتیشنهای توپوگرافی به کاهش حجم دادهها برای پردازش کمک میکنند، اما همچنین برای تقسیم دادههای مرجع به مجموعه دادههای آموزشی و پارتیشنهای دادههای آزمایشی برای اعتبارسنجی متقاطع k-fold (CV) استفاده میشوند. در یادگیری ماشین، اعتبار متقابل برای تخمین خطای تعمیم [ 29 ] استفاده می شود (صفحه 486 ff). در این مورد، داده ها به k=10 پارتیشن تقسیم می شوند. 9 مورد از این ها برای آموزش و یکی برای آزمایش استفاده می شود. آموزش و تست 10 بار تکرار می شود تا هر نمونه فرعی یک بار برای تست استفاده شود.
مؤلفه اصلی فرآیند ترسیم است که در آن انواع فرآیندهای مختلف یک الگوریتم ترسیم در برابر یکدیگر آزمایش می شوند. این مرحله شامل بهینه سازی پارامتر با استفاده از معیار کیفیت از پیش تعریف شده است. به ردپای ساختمان، داده های مرجع و در صورت لزوم، داده های کمکی مانند داده های شبکه جاده نیاز دارد. انواع فرآیند تعریف شده از نظر پیچیدگی متفاوت است و ممکن است شامل مراحل قبل و بعد از پردازش باشد. شرح مفصل تری از انواع آزمایش شده در این مطالعه را می توان در بخش 3.2 یافت .
روش به دست آوردن مرز تسویه بهینه برای هر نوع فرآیند به شرح زیر است: در ابتدا، الگوریتم برای هر بخش CV مجموعه داده های آموزشی با تغییر پارامترهای مدل آنها اعمال می شود. در این فرآیند، بهترین ترکیب پارامتر با استفاده از معیار کیفیت تعریف شده تعیین می شود. علاوه بر این، بهترین ترکیب پارامترهای بهدستآمده در برابر دادههای آزمایش (پارتیشنهای CV) با محاسبه مقادیر اندازهگیری کیفیت آزمایش میشوند. تمام معیارهای کیفیت محاسبه شده از 10 پارتیشن داده آزمایشی در یک پایگاه داده ذخیره می شوند. در نهایت مجموعه پارامترهایی با بالاترین مقدار کیفیت تعیین می شود. مراحل تک پردازش به طور مفصل در زیر ارائه شده است.
3.1.1. ایجاد پارتیشن های کارتوگرافی
این مدل برای ترسیم مناطق ساخته شده برای مناطق یا کل ایالت ها طراحی شده است. داده های ردپای ساختمان به راحتی می تواند حاوی میلیون ها شی باشد. برای الگوریتم های بسیار پیچیده و محاسباتی فشرده، ممکن است لازم باشد داده ها را به بخش های کوچکتر تقسیم کنیم. این، در زمینه مجموعه داده های بزرگ و تلاش محاسباتی مرتبط، یک روش رایج است. علاوه بر این، هندسه حاصل بعداً به عنوان ورودی برای نمونهگیری تصادفی در فرآیند اعتبارسنجی متقابل استفاده میشود. مهم است که اطمینان حاصل شود که پارتیشن بندی با محتوا متناسب است تا از اثرات ثانویه جلوگیری شود (به عنوان مثال، تقسیم ناکافی بدنه های شهرک). مرزهای شهرداری تا حدی بیش از حد درشت هستند یا هندسه ممکن است بدنه های سکونتگاه بزرگتر را به طور نامناسبی تقسیم کند (مثلاً دو روستای متصل در امتداد یک جاده). از این رو،
در مرحله اول، یک نقشه رستری چگالی با تجزیه و تحلیل ردپای ساختمان محاسبه می شود. در این فرآیند، هر سلول به دست آمده یک مقدار چگالی را نشان می دهد. مقدار چگالی d یک سلول با تقسیم مجموع طول تمام خطوط L در یک دایره (شعاع r ) در اطراف مرکز سلول و مساحت این دایره محاسبه می شود (ر.ک. معادله (1)). این تابع چگالی به طور پیش فرض در ArcGIS برای دسکتاپ پیاده سازی شده است [ 30 ]. اندازه سلول شبکه باید با توجه به برنامه تعیین شود. ثابت شده است که فاصله شبکه 100 متر و شعاع 200 متر برای انواع مختلف سکونتگاه ها در منطقه مورد مطالعه ما مفید است ( شکل 2 ب).
د=∑ک = 1��ک�*�2
سپس، نقشه شطرنجی به یک رستر نقطه ای تبدیل می شود، که در آن هر نقطه حاوی یک ویژگی با مقدار چگالی متناظر سلول است. همه نقاط زیر یک مقدار آستانه (مقدار چگالی <0.0009 m/m 2 ) حذف می شوند و فقط خوشه های نقطه ای با مقادیر چگالی بالا باقی می مانند.
آستانه با آزمایش تجربی تعیین شد. متعاقباً، یک شبکه نامنظم مثلثی (TIN) و یک نمودار Voronoi تولید میشود ( شکل 2 a را ببینید)، که یک الگوی منظم را در خوشههای نقطهای باقیمانده تشکیل میدهد. با شروع از نمودار Voronoi، تمام خطوط با طول مساوی به اندازه سلول تعریف شده نقشه چگالی و تمام خطوط دارای بن بست حذف می شوند. خطوط باقیمانده (خطوط آبی تیره در شکل 2 الف) شبکه هایی را تشکیل می دهند که به چند ضلعی تبدیل می شوند ( شکل 2 ب را ببینید). در مطالعه تجربی ما، تنها آن پارتیشنهایی مرتبط هستند که با دادههای مرجع همپوشانی دارند.
3.1.2. بهینه سازی پارامتر
بهینهسازی پارامترهای خودکار و تعریف محدودیتها برای توسعه گردش کار کارآمد در تعمیم خودکار دادههای مکانی مهم هستند. انتخاب پارامترهای مناسب یک الگوریتم ترسیم از طریق «آزمایش و خطا» تنها به میزان محدودی کار خواهد کرد و زمانبر است. با افزایش وسعت منطقه تحت بررسی، این رویکرد به دلیل ناهمگونی گسترده سکونتگاه ها در اندازه و شکل، به محدودیت های خود می رسد.
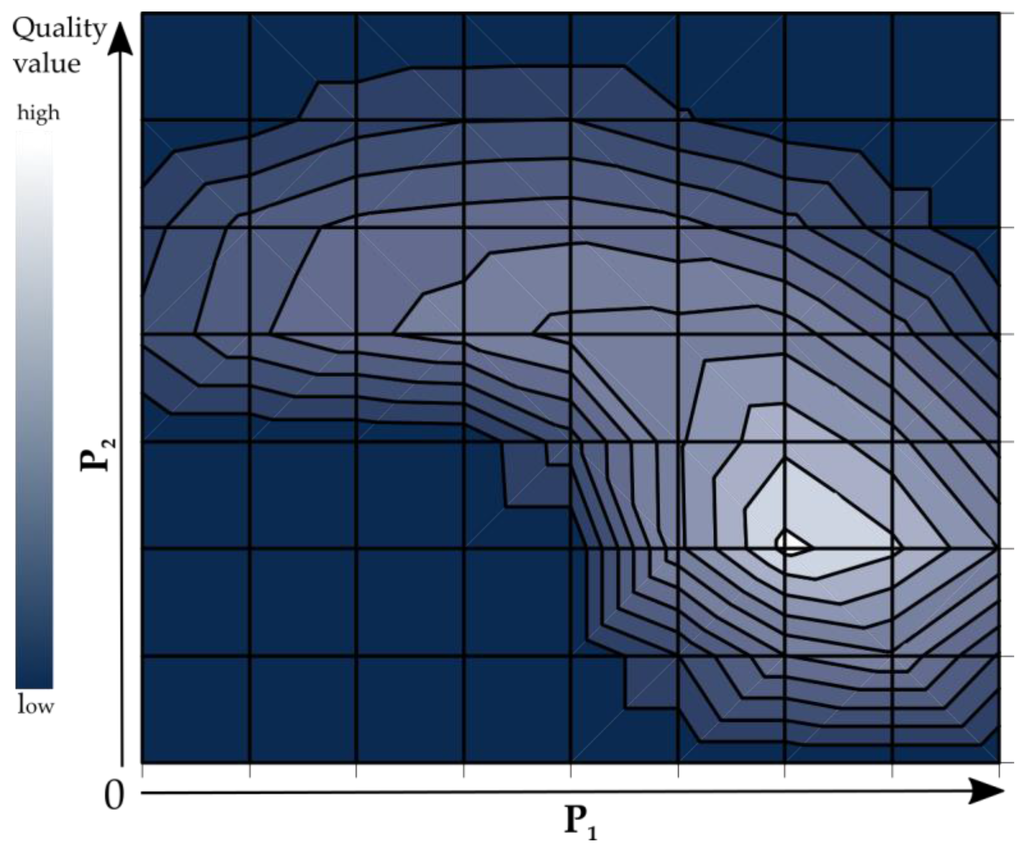
در این مرحله، پارامترهای هر الگوریتم تعیین شده را می توان با کمک داده های مرجع بهینه کرد. شکل 3 به عنوان مثال نشان می دهد که چگونه ترکیبات پارامترهای مختلف یک الگوریتم تعمیم باعث ایجاد خطوط متفاوت از چند ضلعی های بسیار تکه تکه و کوچک ( شکل 3 a) تا چند ضلعی های بسیار تجمیع شده و ساده شده ( شکل 3 ج) می شود. یادگیری ماشین به تعیین بهترین ترکیب پارامتر با استفاده از داده های مرجع موجود کمک می کند. یک راه حل ساده این است که تمام ترکیبات پارامترهای P 1 , P 2 , … , P n را محاسبه کنیم که بهترین نتایج را در مقایسه با یک مرجع داشته باشد ( شکل 4 را ببینید ).
3.1.3. تعریف معیار کیفیت هندسی
معیارهای کیفیت در زمینه تعمیم خودکار می توانند سه وظیفه فرموله شده توسط Mackaness و Ruas [ 31 ] را انجام دهند: ارزیابی برای تنظیم، ارزیابی برای کنترل فرآیند تعمیم در طول تعمیم و ارزیابی برای ارزیابی کیفیت داده های تعمیم یافته پس از تعمیم. ما از آنها برای همه این اهداف استفاده کردیم.
برای اندازه گیری کیفیت، ما از انطباق روش آماری پوشش بافر (BOS) که توسط Tveite و Langaas [ 32 ] معرفی شده است، استفاده می کنیم. برای جلوگیری از سردرگمی، روش اقتباسی مورد استفاده در اینجا به عنوان روش پوشش بافر (BOM) نامیده می شود. اساسا، BOM از تقاطع چند ضلعی های ایجاد شده توسط بافر کردن مرزها استفاده می کند. این برای خطوط مرزی مرجع R و طرح کلی D منطقه ساخته شده ایجاد شده و همچنین خطوطی که با بافر کردن چند ضلعی های حاصل ( مساحت (RB) ، مساحت (DB)) و تقاطع ( مساحت (RB∩DB) ایجاد می شوند کار می کند. ). ارزش کیفیت Q BOMاز نسبت مساحتی که با بافر کردن و همپوشانی دو مرز ( مساحت(RB∩DB ) و مساحت مرز مرجع بافر ( مساحت(RB) ) ایجاد می شود. معادله (2) محاسبه کیفیت را نشان می دهد. مقدار Q BOM :
سب�م=آ�هآ(آرب∩دیب)آ�هآ(آرب)
عرض بافر باید بر اساس برنامه کاربردی و داده های استفاده شده تنظیم شود. در رویکرد ما، از عرض بافر 15 متر استفاده می کنیم. به عنوان مثال، در این مورد، فاصله متوسط بین مرجع و ترسیم 15 متر برابر با مقدار Q BOM 0.5 است، زیرا همپوشانی نیمی از ناحیه بافر بخشی از ناحیه مرجع را تشکیل می دهد.
3.2. انواع پردازش
در مطالعه خود، ما از انواع مختلف پردازشی استفاده میکنیم که همگی بر اساس عملکرد خارج از جعبه “Delineate Built-Up Area” موجود در ArcGIS Esri برای دسکتاپ (نسخه 10.4) هستند. این ابزار استاندارد بخشی از مجموعه ابزار تعمیم است و برای شناسایی ترتیبات استقرار متراکم در زمینه تعمیم نقشه برداری استفاده شده است [ 33 ]. بنابراین، فرض بر این است که این ابزار برای ترسیم مناطق داخلی نیز مناسب است. اگرچه این ابزار یک جعبه سیاه است، با توجه به مستندات [ 28 ]، ابزار ساختمانهای خوشهای متراکم را ترسیم میکند و چند ضلعیهایی ایجاد میکند که مناطق ساختهشده را نشان میدهند. آرایش متراکم ساختمان ها با پارامتر فاصله گروهی ( GPR). طرح کلی چند ضلعی های به دست آمده را می توان به ویژگی های دیگری مانند جاده ها یا راه آهن تغییر داد. با این حال، فقط ویژگی ها در فاصله گروه بندی و در همان جهت چند ضلعی شکسته می شوند. پیچیدگی چند ضلعی های حاصل با پارامتر Minimum Detail Size ( DET ) کنترل می شود. پارامترهای ابزار مربوطه در جدول 1 خلاصه شده است .
در این رویکرد، تنها پارامترهای GRP و DET در طول فرآیند آموزش بهینه خواهند شد. بهینه سازی برای این پارامترها باید به صورت افزایشی و با فاصله زمانی مشخصی که با دقت هدف متناسب است انجام شود. در صورت سناریوی کاربردی برای نظارت بر تصرف زمین، مقیاس هدف 1:10000 تا 1:25000 است. در برنامه ریزی منطقه ای مقیاس های 1:50000 تا 1:100000 معمول است. بنابراین، افزایش 10 متر برای پارامترهای GRP و DET انتخاب می شود. افزایش های کوچکتر امکان پذیر است، اما فقط اطلاعات ظاهراً بیشتری را ارائه می دهد. مقدار شروع 5 انتخاب می شود و به تدریج به مقدار نهایی 75 افزایش می یابد. سومین پارامتر عددی Minimum Count of Buildings (MCB)قرار بود روی یک مقدار ثابت تنظیم شود. با توجه به محدودیت حداقل 10 تا 12 ساختمان برای تشکیل یک منطقه داخلی [ 23 ] (§ 34 Rn 111) مقدار 15 برای MCB انتخاب شد.
در ادامه چهار تنوع پردازشی مختلف به منظور بررسی اثرات استفاده از داده های اضافی، پیش و پس پردازش یا فیلترینگ داده ها مشخص شده است.
3.2.1. ترسیم منطقه ساخته شده با استفاده از چند ضلعی های ساختمانی (DBA-B)
در این نوع، از ابزار Delineate Built-Up Area همانطور که در جعبه ابزار ArcGIS پیاده سازی شده است استفاده می شود. فقط چند ضلعی های ساختمانی به عنوان داده های ورودی استفاده می شوند و هیچ دستکاری داده (پیش یا پس از پردازش) انجام نمی شود.
3.2.2. ترسیم منطقه ساخته شده با استفاده از چند ضلعی های ساختمانی و شبکه جاده (DBA-BR)
در این نوع پردازش، یک مجموعه داده شبکه جاده ای به عنوان داده کمکی اضافه می شود زیرا این نیز یک مرز مشترک برای تعریف مناطق ساخته شده [ 22 ] است (§ 34 Rn 6). ویژگی های این مجموعه داده در فاصله گروه بندی و در همان جهت چند ضلعی برداشته می شود. در نتیجه، شکل چند ضلعی حاصل توسط طرح جاده ها تنظیم می شود. این گزینه ای است که ابزار به طور پیش فرض ارائه می کند. تمام پارامترها همانطور که در بالا توضیح داده شد تنظیم شدند.
3.2.3. ترسیم منطقه ساخته شده با استفاده از چند ضلعی های ساختمانی و شبکه جاده با پیش و پس پردازش اضافی (DBA-BRPP)
در این نوع، مراحل اضافی قبل و بعد از پردازش مانند حذف، بافر، ساده سازی یا حذف فضاهای خالی انجام شد. اینها عملیات رایج در این زمینه هستند [ 34 ].
ساختمانهایی حذف شدند که نمیتوان آنها را با تعریف به منطقه داخلی اختصاص داد. اینها ساختمان هایی هستند که به عنوان محل زندگی طولانی مدت برای افراد مناسب نیستند [ 22 ] (§ 34 Rn 7). این به ویژه به ساختمان های کشاورزی یا انبارها، باغ ها و خانه های آخر هفته یا سوله ها و گاراژها مربوط می شود. ساختمان های کوچک و بی ربط را می توان به دلیل کوچک بودن آنها شناسایی کرد. هچت [ 35] (ص 156) تأیید کرد که ساختمانهای مجزا با متراژ 56 متر مربع و ساختمانهای متصل با 39 متر مربع به احتمال 99 درصد مسکونی نیستند. بنابراین تمامی ساختمان هایی که ردپایی کمتر از 39 متر مربع دارند حذف می شوند. شناسایی ساختمان های کشاورزی بسیار دشوارتر است. تمایز بین این ساختمانها و ساختمانهای تجاری بزرگ، تنها بر اساس ردپای ساختمان، تقریبا غیرممکن است.
علاوه بر این، ردپای باقی مانده ساختمان به حداقل مستطیل های محصور تبدیل می شود و بسته به طول کوچکترین لبه بافر می شود. اگر طول کوچکترین لبه حداقل مستطیل محصور کوچکتر از 35 متر و بزرگتر از 6 متر باشد، اختلاف تا 35 متر محاسبه می شود و هندسه با این مقدار بافر می شود. در تمام موارد دیگر، ردپای ساختمان با 1 متر بافر می شود. این بافر حداقل عرض مرز نشست حاصل را تضمین می کند. این مرحله ترسیم بهتر ساختارهای خطی مانند خانه های ردیفی را تضمین می کند.
بسته به پارامترهای کنترلی فاصله گروهی و حداقل اندازه جزئیات، چند ضلعی های ترسیم شده حاوی فضاهای خالی بزرگتر یا کوچکتر هستند (حفره در چند ضلعی). فرض بر این است که فضاهای خالی کوچکتر از یک هکتار بخشی از سکونتگاه بوده و در نتیجه بسته هستند. تمام فضاهای خالی بزرگتر باقی می مانند. علاوه بر این، شکاف های بین چند ضلعی های مجاور در فاصله 50 متری نیز بسته می شوند.
3.2.4. ترسیم منطقه ساخته شده با استفاده از چند ضلعی های ساختمانی و شبکه جاده با پیش و پس پردازش اضافی و شاخص شهری (DBA-BRPPU)
این نوع شامل یک فرآیند فیلتر اضافی برای تمایز بین ساختمان های کشاورزی و ساختمان های تجاری بزرگ است. در اینجا فرض بر این است که انبارها و اصطبلها ساختمانهایی هستند که عمدتاً در لبه یا خارج از سکونتگاهها واقع شدهاند، معمولاً به تنهایی قرار دارند و معمولاً ردپایی بزرگتر از ساختمانهای مسکونی در مناطق روستایی دارند. برای شناسایی، از شاخص شهری توسط Chaudhry و Mackaness [ 18 ] برای توصیف استفاده شد. شاخص U j برای ساختمان j نزدیکترین n ساختمان را در نظر می گیرد (به معادله (3) مراجعه کنید). متغیر a مساحت ردپا و متغیر d کمترین فاصله از ساختمان تا ساختمان را نشان می دهدمن _ در مدل، تنها ردپای ساختمان با مقدار U j بیشتر از 0.0003297 برای پردازش بیشتر استفاده می شود. آستانه با کمک یک منحنی حاصل از تجزیه و تحلیل ویژگی های عملیاتی گیرنده (ROC) تنظیم شد. به طور کلی، چنین تحلیل ROC روشی برای شناسایی یک نقطه برش بهینه در مسائل طبقهبندی باینری است. در GIS، تجزیه و تحلیل ROC به طور گسترده استفاده می شود، به عنوان مثال، برای پیش بینی تغییر کاربری/پوشش زمین، توزیع گونه ها، بیماری ها و خطرات بلایا [ 36 ].
��=آ�∑من = 1�آمن∑من = 1�دمن2
4. نتایج
در این بخش، تشریحات حاصل از هر یک از انواع به تفصیل بررسی شده است. در ابتدا داده های مورد استفاده در این پژوهش توضیح داده می شود. سپس، انواع مختلف پردازش از نظر دقت های به دست آمده با محاسبه معیارهای کیفیت مختلف مانند مقدار Q BOM معرفی شده ، دقت طبقه بندی و همچنین دقت و یادآوری مقایسه می شوند. علاوه بر این، انواع پردازش از نظر تأثیر بصری مقایسه می شوند. در نهایت، انواع مختلفی از خطاها معرفی می شوند که ممکن است از نقطه نظر برنامه گرا مرتبط باشند.
4.1. داده ها و آماده سازی داده ها
همانطور که در بالا توضیح داده شد، در دسترس بودن داده های مرجع مفید و به روز محدود است. به عنوان مرزهای مرجع، هندسه ناحیه داخلی از منطقه هانوفر می تواند به دست آید. آنها در سال 2005 تحت برنامه برنامه ریزی منطقه ای 2005 (RROP) با کمک کارشناسان بر اساس نقشه نقشه برداری خودکار زمین (ALK) و عکس های ارتو [37] به عنوان فهرست کاملی از تمام شهرهای کوچک با جمعیت کمتر از 2000 ایجاد شدند . بنابراین، مرجع فقط بخش هایی از کل منطقه را پوشش می دهد.
ردپای ساختمان یکی از دادههای ورودی کلیدی برای الگوریتمهای ترسیم سکونتگاهها است. آنها را میتوان از منابع مختلفی مانند پایگاههای اطلاعاتی توپوگرافی، نقشهها، تصاویر سنجش از دور، LiDAR، و غیره بهدست آورد . HU-DE حاوی چند ضلعی های ارجاع شده جغرافیایی است که نشان دهنده ردپای ساختمان است که از کاداستر املاک و مستغلات آلمان به دست آمده است. چند ضلعی ها به استثنای یک کلید رسمی شهرداری (به آلمانی: Amtlicher Gemeindeschlüssel (AGS)) هیچ گونه اطلاعات انتسابی ندارند. این مجموعه داده هر سال به روز می شود.
به عنوان داده های کمکی، داده های خطوط خیابان و جاده از ATKIS ® Base DLM از سال 2011 استفاده می شود. مجموعه داده شامل تمام خیابانها، جادهها، از جمله جادههای آسفالت نشده در سراسر کشور است، اگر اتصالات مهمی بین شهرکها باشد.
مجموعه داده مرجع برای هدف دیگری ایجاد شده است. بنابراین، تنظیمات در یک فرآیند آماده سازی داده ها انجام می شود. این شامل شناسایی و حذف خطاهای توپولوژی و دیجیتال سازی (به عنوان مثال، همپوشانی ها، پوشش های جزئی و غیره) است. پس از آماده سازی داده ها، داده های مرجع شامل 166 چند ضلعی مرجع با وسعت متوسط 28 هکتار می باشد. یک نمای کلی از داده های مورد استفاده در جدول 2 ارائه شده است .
4.2. مقایسه انواع پردازش
مجموعه پارامترهای بهینه شده نتایج آزمایش هستند. بهترین مقادیر برای مرزهایی با طول لبه های کوتاه 5 متر و فاصله گروه بندی 45 یا 25 متر به دست می آید ( شکل 5 را ببینید ).
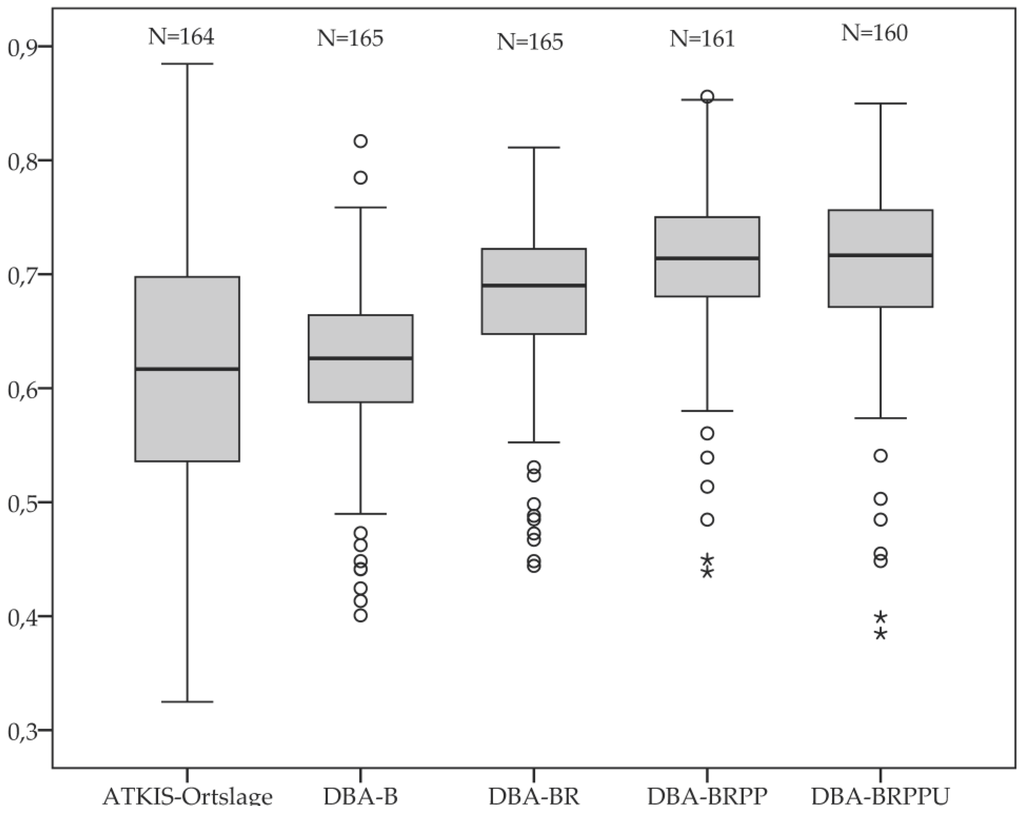
در طول آموزش و آزمون، مراحل ارزیابی همیشه در حد کامل ترسیم انجام می شد. سپس مقدار کیفیت Q BOM برای هر ویژگی منفرد مثبت واقعی محاسبه می شود. بر اساس این مقدار، ویژگی های آماری (میانگین، میانه، حداکثر و حداقل مقدار، محدوده و انحراف معیار) محاسبه می شود. ATKIS ® -Ortslage به دلایل مقایسه گنجانده شده است. نتایج در جدول 3 در زیر نشان داده شده است .
ATKIS ® -Ortslage کمترین مقادیر را به طور کلی نشان می دهد. میانگین Q BOM 0.615 است. یک استثنا حداکثر ( Q BOM ) است. این با مقدار 0.885 در ATKIS ® -Ortslage یافت می شود. کوچکترین محدوده بین بهترین و بدترین ترسیم یک نشست در نوع DBA-BR با 0.367 یافت می شود. بهترین کیفیت متوسط در نوع DBA-BRPP با Q BOM 0.710 بدست می آید. در نوع DBA-BRPPU، مرحله پردازش اضافی کیفیت ترسیم را بهبود نداده است. در اینجا، مقدار Q BOM 0.705 است. نتایج عددی دوباره به صورت نمودارهای جعبه ای در شکل 6 نمایش داده شده اند .
اینکه آیا نتایج به طور قابل توجهی متفاوت است نیز مورد بررسی قرار گرفت. اهمیت برای مقدار p کمتر از سطح معناداری 0.05 = α تأیید می شود. برای ATKIS ® -Ortslage، تشخیص توزیع نرمال با استفاده از آزمون Shapiro-Wilk ممکن نبود. علاوه بر این، واریانس تفاوت زیادی با سایر رویکردها داشت. واریانس ناهمگن و ns نابرابر است. بنابراین برای مقایسه با این رویکرد از آزمون من ویتنی استفاده شد و با توجه به حجم نمونههای مختلف، برای سایر نمونهها از آزمون ولچ استفاده شد. نتایج آزمایشات در جدول 4 در زیر نشان داده شده است. بر این اساس، نتایج از انواع ATKIS ®-Ortslage و DBA-B و همچنین انواع DBA-BRPP و DBA-BRPPU تفاوت قابل توجهی با یکدیگر ندارند. برای بقیه، تفاوت های قابل توجهی تایید شد.
4.3. دقت و یادآوری
در جدول 5، نتایج طبقه بندی با در نظر گرفتن کل شهرک نشان داده شده است. اگر یک خط کشی توسط الگوریتم در مکانی که یک مرز مرجع وجود دارد ایجاد شود، این به عنوان یک طبقه بندی مثبت واقعی (TP) محاسبه می شود. بر این اساس، یک طبقهبندی منفی کاذب (FN) زمانی قابل اعمال است که یک مرز مرجع وجود داشته باشد و هیچ گونه ترسیمی توسط الگوریتم ایجاد نشده باشد. یک طبقه بندی مثبت کاذب (FP) زمانی حاصل می شود که یک خط کشی ایجاد شود، اما مرز مرجع مربوطه وجود ندارد. دقت طبقه بندی را می توان با دقت و یادآوری نشان داد. دقت کسری از مثبت واقعی (TP) و مجموع TP و مثبت کاذب (FP) است، در حالی که یادآوری به معنای کسر TP و مجموع TP و منفی کاذب (FN) است. نوع DBA-BRPP (0.96/0.97) و DBA-PRPPU (0.97/0.جدول 5 ).
در جدول 6 ، مناطق طبقه بندی شده کمی شده اند. مساحت مرجع، مساحت ترسیم، مثبت واقعی (TP)، مثبت کاذب (FP) و منفی کاذب (FN) منطقه طبقه بندی شده و همچنین دقت و یادآوری محاسبه می شود. ATKIS ® -Ortslage دارای بالاترین ارزش TP با 4403 هکتار، اما همچنین بالاترین خطای طبقه بندی با 1570 هکتار (FN+FP) است. نوع DPA-BRPP در منطقه TP با 3823 هکتار دوم است. با این حال، خطای طبقه بندی کلی با 867 هکتار (FN+FP) کوچکترین است.
4.4. تجزیه و تحلیل بصری انواع
شکل 7 یک تصویر بصری از ATKIS ® -Ortslage و همچنین چهار بهترین ترسیم انواع مختلف را ارائه می دهد. بسیاری از مناطق بزرگ با طبقه بندی های مثبت کاذب را می توان در ATKIS ® -Ortslage تشخیص داد. زمانی که سکونتگاهها شامل مناطقی برای اوقات فراغت و تفریح (مثلاً زمینهای ورزشی و پارکها) یا بخشهایی باشد، این نواحی میتوانند نسبتهای بسیار بیشتری را به خود اختصاص دهند. امکانات ورزشی و پارک ها معمولاً ساختمان های بسیار کمی دارند. این مناطق با رویکرد ترسیم بر اساس ساختمان ناپدید می شوند. بنابراین، در نوع DBA-B، تنها چند طبقهبندی مثبت کاذب قابل مشاهده است، اما ترسیم شامل تعداد زیادی از فضاهای خالی است. اینها مقادیر بالای منفی کاذب جدول 6 را منعکس می کنند. تفاوت اصلی بین نوع DBA-B و DBA-BR این است که چیدمان خیابان ها در نظر گرفته شده است. این را نمی توان در تصویر مشاهده کرد، زیرا فقط چند متر تنظیمات وجود دارد. با این حال، در نظر گرفتن مجموع (رجوع کنید به جدول 3 و جدول 6 ) افزایش قابل توجهی در کیفیت تعهدی را نشان می دهد. در انواع DBA-BRPP و DBA-BRPPU، ردپاهای ساختمان همانطور که در بخش 3.2.3 توضیح داده شد، از قبل پردازش شدند و ترسیمها دوباره کار شدند. به دلیل حذف ساختمانهای منفرد در بدنههای سکونتگاهی با ساختمانهای بسیار کم، به حداقل تعداد ساختمانها نرسیده و یا فاصله بین ساختمانهای باقیمانده (MBC) برای تشکیل چندضلعی بسیار زیاد است. در شکل 7d,e، این در طبقه بندی منفی کاذب سکونتگاه 1 قابل مشاهده است. بسته شدن فضاها و شکاف ها باعث کاهش طبقه بندی های منفی کاذب می شود. با این حال، در منطقه حاشیه ای هنوز ساختمان های فردی وجود دارد که منجر به طبقه بندی های مثبت کاذب می شود. بنابراین، در نوع DBA-BRPPU، یک فیلتر اضافی، شاخص شهرنشینی گنجانده شده است. با این حال، یک اثر ثانویه حذف ساختمان های بیشتر این است که طبقه بندی های منفی کاذب بیشتری وجود دارد، همانطور که در شکل 7 e در مقایسه با شکل 7 d و همچنین در جدول 6 مشاهده می شود .
4.5. انواع خطا
پس از اندازه گیری کیفیت هندسی و همچنین دقت طبقه بندی، دو سوال باقی مانده است که باید پاسخ داده شود. خطاها چگونه هستند؟ فراوانی آنها و تأثیر آنها بر دقت ترسیم (وزن دهی) چیست؟ این نوع ارزیابی به محتوای پشت مرز خاص بستگی دارد. بنابراین فقط به کاربرد خاص مربوط می شود، ذهنی است و فقط تا حدی قابل تعمیم است. با این حال، به منظور کامل بودن و شفافیت و همچنین برای نشان دادن محدودیت های اتوماسیون در زمینه ترسیم مناطق ساخته شده، در ادامه به اختصار توضیح داده خواهد شد.
در طول تعمیم خودکار، خطاهای سیستمی و ناشی از داده ممکن است رخ دهد. خطاهای سیستمیک خطاهایی در ترسیم ترسیم هستند که ریشه در خود الگوریتم دارند. طبقه بندی های منفی کاذب عبارتند از شکاف های روی لبه (ر.ک. شکل 8 a,f)، فضاهای خالی در داخل یک مرز (ر.ک. شکل 7 b,c)، یال هایی که ساده نشده اند (ر.ک. شکل 8 g) یا خط مانند سازه های سکونتگاهی که طبقه بندی نشده اند. طبقهبندیهای مثبت کاذب در جایی اتفاق میافتند که ساختمانهای منفرد در داخل مرز قرار میگیرند که به طور رسمی به منطقه داخلی اختصاص داده نشدهاند (به شکل 8 a,c,d,f,g مراجعه کنید). از طرف دیگر، فضاهای خالی در یک مرز وجود دارد که توسط الگوریتم قابل تشخیص نیست.
خطاهای ناشی از داده ها به دلیل خطاهای موجود در مجموعه داده ورودی ایجاد می شوند. در این کار، استفاده از دادهها با برشهای زمانی مختلف (چند ضلعیهای ساختمان رسمی از سال 2011 و دادههای مرجع از سال 2005) به دلیل تغییرات ساختار نشستی که در این بین رخ داده است، باعث ایجاد خطا میشود. اینها در شکل 8 e,h با فلش نشان داده شده اند. مناطق آبی نمونه ای از این گونه توسعه های سکونتگاهی هستند.
نوع دیگری از خطاهای وارد شده توسط داده ها شامل خطاهای دیجیتالی سازی است. به عنوان مثال، در شکل 8 e، یک برجستگی دیجیتالی دیده می شود که نمی توان آن را از نظر محتوا توضیح داد.
جدول 7 یک نمای کلی از فراوانی و وزن خطاها در نوع DBA-BRPP ارائه می دهد. سطح خطا در مقیاس ترتیبی از کم تا متوسط به زیاد ارزیابی شده است.
خطاهای ترکیبی از فرکانس بالا یا متوسط و وزن دهی تأثیر زیادی بر کیفیت کلی ترسیم دارند. در این مورد، شکاف در لبه مرز، از دست رفتن ترسیم سکونتگاه های خط مانند و مناطقی که به طور رسمی به منطقه داخلی تعلق ندارند، خطاهای مشکل ساز هستند.
5. بحث
در ادامه، نتایج در معرض بازتاب انتقادی در پس زمینه یک برنامه کاربردی در یک نظارت و تجزیه و تحلیل سراسری سکونتگاهها قرار میگیرد. در مرحله اول، انواع مختلف پردازش از نظر دقت های به دست آمده و در مقایسه با ATKIS® -Ortslage که قبلا استفاده شده بود، مورد بحث قرار می گیرند . در مرحله دوم، رویکرد به عنوان یک کل، با استفاده از بهترین نوع پردازش، از نقطه نظر عملی مورد بحث قرار می گیرد.
5.1. انواع پردازش
5.1.1. نوع DBA-B
نتایج بر اساس نوع DBA-B با کاربرد ساده منطقه ساخته شده Delineate از نظر معیار کیفیت هندسی تعریف شده Q BOM به طور قابل توجهی بهتر از Ortslage از ATKIS Base DLM نیست . دقت طبقهبندی تعداد بالایی از ویژگیهای مثبت کاذب را بر اساس شمارش نشان میدهد ( جدول 5 را رجوع کنید )، اما نگاهی به مناطق نشان میدهد که این ویژگیها عمدتاً قطعات نشست کوچک در ناحیه بیرونی هستند. مقدار بالای منفی های کاذب بر اساس مساحت (به جدول 6 مراجعه کنید) عمدتاً ناشی از فضاهای خالی ناشی از مناطق توسعه نیافته در منطقه ساخته شده است (مانند پارک ها، زمین های قهوه ای و مناطق پارکینگ بزرگ). این یک مشکل Chaudhry و Mackaness است [34 ] با روش مبتنی بر بافر خود و همچنین Chesnokova و همکاران روبرو هستند. [ 38 ] با الگوریتم “چندضلعی های جمعی” از ArcGIS Esri. هر دو این مشکل را با مراحل اضافی پس از پردازش حل می کنند، زیرا از دیدگاه پزشک این فضاهای خالی باید بسته شوند و به عنوان مناطق ساخته شده (منطقه داخلی) در نظر گرفته شوند.
5.1.2. نوع DBA-BR
کیفیت ترسیم را می توان با استفاده از نوع DBA-BR که جاده ها را به عنوان لبه در فرآیند ترسیم در نظر می گیرد، به طور قابل توجهی افزایش داد. این امر بدیهی است زیرا جاده ها اغلب مرزهای واقعی یک سکونتگاه هستند و معرفی این لبه های سخت به ناحیه منفی کاذب پایین تر منجر می شود، در حالی که ناحیه مثبت کاذب را کمی افزایش می دهد. معرفی جاده ها تقریباً هیچ تأثیری بر میزان دقت و میزان فراخوانی ندارد ( جدول 5 را رجوع کنید ). قابل توجه افزایش نسبتاً بالای مقدار Q BOM به 0.679 است.
5.1.3. نوع DBA-BRPP
با استفاده از نوع DBA-BRPP، که شامل پیش و پس پردازش اضافی است، مقدار کیفیت Q BOM دوباره به طور قابل توجهی در مقایسه با نوع DBA-BR افزایش می یابد. ناحیه منفی کاذب را می توان با حذف و بستن فضاها و شکاف های خالی در پس پردازش کاهش داد، اما این امر گهگاه مناطق مثبت کاذب جدیدی ایجاد می کند ( جدول 6 را ببینید ). کاهش در طبقه بندی منفی کاذب، 204 هکتار (4.36٪)، با افزایش جزئی 20 هکتاری مثبت کاذب (0.43٪) در مقایسه با نوع DBA-BR مخالف است. بهعلاوه، ویژگیهای مثبت کاذب بر حسب عدد نرخگذاری میکنند ( جدول 5 را ببینید) به شدت کاهش یافت و منجر به بهبود قابل توجه نرخ دقت کلی به 0.96 شد. این عمدتا به دلیل پیش پردازش اضافی، به ویژه حذف ساختمان های نامربوط با فیلتر کردن است.
5.1.4. نوع DBA-BRPPU
در نوع DBA-BRPPU، یک معیار شاخص شهری اضافی با هدف کاهش بیشتر ویژگیهای مثبت کاذب (به عنوان مثال، ساختمانهایی برای استفاده کشاورزی) از طریق فیلتر کردن ساختمانها در مناطق روستایی معرفی شده است. نتایج نشان میدهد که در واقع مثبتهای کاذب در مقایسه با نوع DBA-BRPP 51 هکتار کاهش یافته است، اما در عین حال افزایش منفی کاذب به میزان 71 هکتار مشاهده شده است. به نظر می رسد که معرفی شاخص شهری کمک شایانی به تفکیک پهنه های درونی و بیرونی نمی کند. به طور کلی، هیچ افزایش یا کاهش قابل توجهی در مقدار Q BOM در مقایسه با نوع قبلی DBA-BRPP وجود ندارد .
5.1.5. مقایسه انواع پردازش
انواع DBA-BRPP و DBA-BRPPU بهترین نتایج را از نظر کیفیت هندسی نشان داده شده توسط مقدار Q BOM و دقت طبقه بندی (دقت / فراخوان) ارائه می دهند. بنابراین ما استفاده از نوع DBA-BRPP را پیشنهاد میکنیم، زیرا محاسبه شاخص شهری اضافی ارزش اضافه نمیکند. برای بسیاری از مشکلات طبقه بندی، مقادیر متعادل خطای مثبت کاذب و منفی کاذب به دلیل تفاوت در هزینه های خطا نامطلوب هستند [ 39 ]. در مورد درخواست ما، دست کم گرفتن به همان اندازه مضر است که برآوردهای بیش از حد. در این نوع، آنها تقریباً یکسان هستند که می توان آن را جنبه مثبتی در نظر گرفت.
در سناریوی کاربردی نظارت بر برداشت زمین، نوع DBA-BRPP ترسیم بهتری را نسبت به Ortslage از ATKIS ® Base DLM فراهم می کند. استفاده از هندسه از ATKIS ® منجر به تخمین بیش از حد منطقه ساخته شده با مقدار 27.5٪ در مقایسه با مرجع می شود، در حالی که با استفاده از روش ما با استفاده از نوع DBA-BRPP، تخمین بیش از حد فقط 0.15٪ است. با این حال، برای ارزیابی ترسیم، دقت و نرخ فراخوان نیز مرتبط هستند. مقادیر هم برای دقت و هم برای یادآوری بیشتر از 0.9 است.
هنگام تفسیر دقت و یادآوری بر اساس منطقه ( جدول 6 )، لازم به ذکر است که در این مطالعه فقط سکونتگاه های کوچک در نظر گرفته شده است. در این مورد، خطاهای جزئی (مثبت کاذب یا منفی کاذب) تأثیر بیشتری بر دقت و نرخ یادآوری نسبت به خطاهای موجود در سکونتگاههای بزرگتر و فشردهتر دارند. با این حال، مقدار Q BOM معرفی شده ، به عنوان یک معیار کیفیت، مستقل از مقیاس است.
انواع DBA-B و DBA-BR به دلیل تعداد بالای طبقهبندیهای مثبت کاذب، ترسیم قابل استفاده ارائه نمیدهند.
5.2. بحث در مورد رویکرد به عنوان یک کل
الگوریتم پارتیشن بندی پیشنهادی ارائه شده در بخش 3.1.1 از دو طریق در رویکرد کلی مفید است. در مرحله اول، امکان پارتیشن بندی داده های ساختمان را برای پردازش کارآمدتر فراهم می کند. ثانیاً، مبنای تقسیم مجموعه داده ها به داده های آزمایشی و آموزشی برای اعتبارسنجی متقابل 10 برابری است.
رویکرد یادگیری تحت نظارت معرفی شده با استفاده از انواع مختلف پردازش که بر اساس یک الگوریتم ترسیم موجود در ArcGIS برای دسکتاپ Esri است، به طور مثال نشان داده شد. برای دستیابی به بهترین کاربرد، ArcGIS را برای دسکتاپ انتخاب کردیم زیرا اغلب در بسیاری از دفاتر برنامه ریزی و موسسات تحقیقاتی استفاده می شود. در غیر این صورت، یک اشکال استفاده از محصولات نرم افزاری تجاری این است که الگوریتم ترسیم به خوبی مستند نیست. بنابراین، سایر الگوریتمهای ترسیم ممکن است در آینده آزمایش شوند.
الگوریتم برای بهینه سازی پارامترها به طور قابل اعتماد عمل می کند و پیاده سازی آن آسان است. با این حال، زمانی که الگوریتم ترسیم مورد استفاده پیچیده تر شود و بیش از دو پارامتر نیاز به آموزش داشته باشد، ممکن است به محدودیت های آن برسد. به عنوان مثال، استفاده از روش brute-force برای جستجوی بهترین ترکیب پارامتر در یک فضای پارامتر 10 بعدی، در اینجا تعداد محاسبات مورد نیاز را به طور چشمگیری افزایش می دهد. در زمینه یادگیری ماشینی نظارت شده، الگوریتم های زیادی وجود دارد که امکان بهینه سازی محاسبات را فراهم می کند [ 40 ]. نقطه ضعف دیگر این است که جستجو به تعداد از پیش تعریف شده از ترکیبات پارامترها محدود می شود، زیرا نقطه شروع، نقطه پایان و فاصله از پیش تعریف شده است.
انتخاب الگوریتم ارزیابی نقش کلیدی دارد. اول، برای اینکه بتواند نتایج مربوط به تحدید حدود را ارزیابی کند، باید هر دو جنبه هندسی و زمینه را در نظر بگیرد. چالش این است که مقایسه n چند ضلعی تکه تکه شده با n چند ضلعی تکه تکه شده باید نتایج قابل اعتمادی تولید کند. اکثریت قریب به اتفاق روش های مبتنی بر فاصله در اینجا شکست می خورند [ 41]. با این حال، روشهای مبتنی بر منطقه، مانند اختلاف متقارن یا ناحیه همپوشانی، اغلب مشکل مقیاس خودشان را دارند. الگوریتم BOM می تواند هر دو مشکل را مدیریت کند. دوم، الگوریتم ارزیابی خود بر نتیجه ترسیم تأثیر می گذارد. این یک مشکل کلی از همه انواع الگوریتم های ارزیابی است که برای کنترل ارزیابی ها استفاده می شود. در این مثال، فضاهای خالی کوچک در واریانت ها (به حداقل رساندن پارامتر DET) با توجه به روش های ارزیابی که ارائه شده است، تشکیل می شوند. مرزهای بیرونی یک ترسیم با استفاده از ناحیه بافر مرجع ( ناحیه RB ) فقط برای عادی سازی در ارزیابی گنجانده شده است. فضاهای خالی در یک خط کشی را می توان نادیده گرفت. این را می توان با عادی سازی با ناحیه بافر ترسیم کاهش داد ( منطقه DB). با این حال، این همچنین به این معنی است که فاصله گروه بندی و همچنین طول لبه های یک چند ضلعی حاصل افزایش می یابد. این به نوبه خود به این معنی است که طبقه بندی های نادرست بیشتری وجود خواهد داشت. این مطالعه برای بازآفرینی مرز ناحیه داخلی و بسته شدن فضاهای خالی که در یک هندسه ظاهر میشوند بر اساس ویژگیهایی مانند اندازه یا شکل طراحی شده است، که بسیار آسانتر از تحدید حدود بیرونی بر اساس محدودیتها بازسازی میشوند. به همین دلیل، عادی سازی با مرجع بافر ترجیح داده می شود. یک مزیت دیگر در عادی سازی در برابر مرجع این است که متغیرها با یکدیگر قابل مقایسه هستند، زیرا مرجع در مقابل ترسیم ثابت است. در نتیجه این تضاد، استفاده از دو نسخه متفاوت از الگوریتم ارزیابی را برای تحقیقات آینده توصیه می کنیم: یکی برای آموزش استفاده ازناحیه DB برای نرمال سازی و یکی برای اعتبارسنجی با استفاده از ناحیه RB برای عادی سازی.
انتخاب داده های آموزشی نیز مهم است. Mustiere [ 42] دو مشکل عمده مرتبط با داده های مرجع را شناسایی می کند: «[..] نمونه های بالقوه به شکل مناسب در دسترس نیستند. و آنها نمونه های دقیقی از آنچه ما قصد انجام آن را داریم نشان نمی دهند. او این مشکل را با ایجاد داده های آموزشی حل می کند. با این حال، این برای بسیاری دیگر که با رویکردهای نظارت شده کار می کنند، امکان پذیر نیست، زیرا جمع آوری داده اغلب امکان پذیر نیست. در اینجا دیدگاه این است که کار با داده های ناقص یا داده های نادرست به جای استثنا قاعده است و بنابراین باید تلاش کرد تا تحت شرایط به بهترین راه حل ممکن دست یافت. این همچنین به کاربرد و قابلیت انتقال بهتر در آینده کمک می کند. خطای مشاهده شده در اینجا در داده های آموزشی منجر به کاهش ارزش کیفیت ترسیم می شود، اما تأثیر بسیار کمی بر تعیین ترکیب پارامتری بهینه دارد.
آزمایشها با شاخص شهری نشان دادهاند که استفاده از فیلترهای هندسی هنگام تلاش برای استخراج ویژگیهای معنایی به مرزهای خود میرسد. یک راه حل ممکن می تواند معرفی یک رویکرد طبقه بندی ساختمان باشد [ 35 ، 43 ]. غنی سازی معنایی داده ها به حذف ساختمان های مناسب کمک می کند.
قابلیت انتقال باید در سه سطح مورد بحث قرار گیرد: (الف) قابلیت انتقال پارامترهای به دست آمده توسط داده های مرجع برای منطقه دیگری در همان زمینه کاربردی. (ب) قابلیت انتقال الگوریتم با استفاده از داده های مرجع جدید به همان زمینه کاربردی. و (ج) قابلیت انتقال کل رویکرد به حوزه کاربردی متفاوت.
در سطح (الف)، یک پیش شرط وارداتی این است که ساختار سکونتگاهی منطقه مورد نظر مشابه منطقه آموزشی باشد. چالش اصلی در اینجا ضرورت تعریف این است که کدام شهرک ها مشابه هستند. تحقیقات اخیر در زمینه مورفولوژی سکونتگاه ها می تواند برای حل این مشکل مفید باشد. برای سکونتگاه هایی با مورفولوژی بسیار متفاوت، آموزش جدید ضروری است. این سطح (b) است، که در آن محدودیت ها داده های مرجع را ندارند. در سطح (c)، محدودیت این است که، به عنوان مثال، یک الگوریتم تجمیع یا زمینه کاربردی متفاوت، متضمن پارامترسازی جدید کل الگوریتم و نه تنها آموزش جدید است. تحقیقات بیشتر از نظر قابلیت انتقال به مناطق دیگر – از نظر فضایی و موضوعی – برنامه ریزی شده است. آزمایشهای اول امیدوارکننده هستند، اما موضوع این مقاله نیستند.
5.3. برنامه های کاربردی بالقوه
هندسه حاصل عمدتاً برای ارزیابی خودکار پتانسیلهای توسعه داخلی منطقهای یا بین منطقهای به کار گرفته میشود. بنابراین، در ابتدا این هندسه یک داده ورودی برای محاسبات بیشتر است. به عنوان مثال، یک خط کشی می تواند برای بررسی اینکه آیا فعالیت های ساخت و ساز عمدتاً در منطقه داخلی و نه فراتر از مرزهای شهر انجام می شود استفاده شود. همچنین یک تاریخ کلیدی برای محاسبه شاخصهای مرتبط مانند نسبت توسعه منطقه داخلی/خارجی است [ 44 ]. استفاده بالقوه از مناطق داخلی در برنامه ریزی منطقه ای متنوع است. در طرحهای منطقهای هسین، بهعنوان مثال، زمینگیری کنترل و محدود میشود و همچنین از نظر کمی با سهمیهبندی برای زمین ساختمانی و از نظر کیفی با ارائه نقشهبرداری [ 36 ، 45] محدود میشود.]. برای محاسبه سهمیه ها و همچنین برای نقشه ها، مناطق داخلی مورد نیاز است (سطح (الف) تا (ب)، رجوع کنید به 5.2).
با این حال، حتی در زمینه توسعه و آزمایش ابزارهای برنامه ریزی جدید، مانند گواهی های ساختمان، منطقه داخلی نقش مهمی ایفا می کند [ 46 ، 47 ]. به منظور تقویت تقدم توسعه درون پر بر توسعه در حاشیه شهری و ارتقای توسعه مناطق شهری یکپارچه، ضرورت اولیه تعریف هندسه پهنه درونی وجود دارد. در این هندسه، کلیه پروژه ها از الزام گواهی ساختمان (سطح (ب) تا (ج)) معاف هستند.
در نهایت، این رویکرد از نقطه نظر علمی مرتبط است، زیرا فرصتی را برای بازسازی توسعههای سکونتگاه تاریخی کارآمد فراهم میکند. رویکردهایی برای استخراج خودکار ساختمان [ 48 ] و استخراج بلوک ساختمانی [ 49 ] بر اساس نقشه های توپوگرافی از قبل وجود دارد. با ترسیم خودکار مرزهای سکونتگاهی، پویایی شهری مانند تراکم، رشد و پراکندگی یا انقباض را می توان در مقیاس های مختلف بررسی کرد و به عنوان داده ورودی برای شبیه سازی ها (سطح (c)) استفاده کرد.
6. نتیجه گیری
ما یک رویکرد نظارت شده برای ترسیم خودکار مرزهای سکونتگاه که نمایانگر درون شهری است، ارائه کردیم. این رویکرد بر روی دادههای توپوگرافی معتبر، بهویژه ردپای ساختمان و دادههای شبکه جادهای تنظیم شده است. یکی از اجزای اصلی رویکرد بهینه سازی پارامتر است. در اینجا، پارامترهای یک الگوریتم ترسیم تعریف شده در یک فرآیند یادگیری نظارت شده با استفاده از معیار کیفیت مناسب آموزش داده میشوند. برای آموزش و آزمایش، مجموعه ای از 166 مرز رسمی منطقه داخلی در منطقه هانوفر در آلمان استفاده می شود. کارشناسان این مرزها را به صورت دستی ترسیم کرده اند. در طول توسعه فرآیند ترسیم، چهار نوع فرآیند مختلف از نظر دقت های به دست آمده مورد آزمایش و مقایسه قرار می گیرند. همه آنها از توابع geoprocessing استاندارد پیاده سازی شده در ArcGIS برای دسکتاپ استفاده می کنند. نتایج متغیر DBA-B افزایش معنی داری را در مقدار نشان نمی دهدQ BOM ، و در نوع DBA-BR، طبقه بندی های منفی کاذب زیادی وجود دارد. بنابراین هر دو خطوط را نمی توان برای یک برنامه نظارتی استفاده کرد.
نوع پردازش DBA-BRPP به عنوان بهترین نوع شناسایی شد. این رویکرد منجر به دقت متعادل و نرخ فراخوان تقریباً 0.9 و مقدار متوسط معیار کیفیت Q BOM 0.71 می شود. در مقایسه با مرزهای حل و فصل استفاده شده قبلی از ATKIS ® DLM، کیفیت ترسیم با استفاده از روش پیشنهادی به طور قابل توجهی بالاتر است.
بنابراین، نتایج رویکرد پیشنهادی امیدوارکننده است و میتواند چندین فرآیند نظارت بر کاربری اراضی را در زمینه برنامهریزی و سیاستگذاری (مانند نظارت، پشتیبانی تصمیمگیری، مدیریت تصرف زمین و ارزیابی ابزارهای برنامهریزی) پشتیبانی کند. به طور خاص، در بحثهای مربوط به حفظ خاکهای ارزشمند و دستیابی به اهداف سیاست (کاهش توسعه میدان سبز و صفر گرفتن زمین خالص در سال 2050 در اتحادیه اروپا)، رویکردهایی برای تعیین کمیت مورد نیاز است. مرزهای استقرار به طور خودکار از داده های توپوگرافی مشترک می تواند به چالش اندازه گیری توسعه سکونتگاه در وضوح بالا کمک کند.
منابع
- جیگر، ج.ا. برتیلر، آر. شویک، سی. کونز، دی. Kienast، F. نفوذ شهری از مناظر و پراکندگی سرانه: اقدامات جدید گسترش شهری. Ecol. اندیک. 2010 ، 10 ، 427-441. [ Google Scholar ] [ CrossRef ]
- Siedentop، S. Fina، S. نظارت بر گسترش شهری در آلمان: به سوی یک رویکرد اندازه گیری و ارزیابی مبتنی بر GIS. J. کاربری زمین علمی. 2010 ، 5 ، 73-104. [ Google Scholar ] [ CrossRef ]
- دکوویل، ا. اشنایدر، ام. آیا زمین صفر سال 2050 هدف اتحادیه اروپا را می توان به طور قابل اعتمادی رصد کرد؟ مطالعه تطبیقی. J. کاربری زمین علمی. 2016 ، 11 ، 331-349. [ Google Scholar ] [ CrossRef ]
- ژو، Q. مطالعه تطبیقی رویکردها برای تعیین مناطق ساخته شده با استفاده از داده های شبکه راه. ترانس. GIS 2015 ، 19 ، 848-876. [ Google Scholar ] [ CrossRef ]
- لانگلی، پی. Mesev, V. در مورد اندازه گیری و تعمیم فرم شهری. محیط زیست طرح. A 2000 , 32 , 473-488. [ Google Scholar ] [ CrossRef ]
- Mesev، V. بازسازی مورفولوژی شهری: پیوندهای بین تصاویر ماهواره ای و اطلاعات آدرس. در GIS و سیاست گذاری مبتنی بر شواهد ; تیلور و فرانسیس: لندن، بریتانیا، 2010; ص 9-42. [ Google Scholar ]
- هیکیلا، ای جی; شن، تی. مجموعه های شهری فازی یانگ، کی: نظریه و کاربرد در مناطق دساکوتا در چین. محیط زیست طرح. B طرح. دس 2003 ، 30 ، 239-254. [ Google Scholar ] [ CrossRef ]
- ژو، ی. اسمیت، اس جی. الویج، سی دی; ژائو، ک. تامسون، ا. Imhoff، M. روشی مبتنی بر خوشه برای نقشهبرداری مناطق شهری از چراغهای شب DMSP/OLS. سنسور از راه دور محیط. 2014 ، 147 ، 173-185. [ Google Scholar ] [ CrossRef ]
- والتر، وی. تفسیر خودکار پایگاه های داده برداری با الگوریتم مبتنی بر شطرنجی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2008 ، 37 (بخش B2)، 175-181. [ Google Scholar ]
- Hangouët، J.-F. رویکرد و روشهای تولید خودکارسازی عمومی نقشهبرداری; برنامه در Bord de Ville. Ph.D. پایان نامه، Université de Marne-La-Vallée، hamps-sur-Marne، فرانسه، 1998. [ Google Scholar ]
- Regnauld، N. Généralisation du Bâti: Structure Spatiale de Type Graphe et Représentation Cartographique. Ph.D. پایان نامه، دانشگاه پروونس، مارسی، فرانسه، 1998. [ Google Scholar ]
- Regnauld، N. نوع سازی ساختمان متنی در تعمیم خودکار نقشه. الگوریتمیکا 2001 ، 30 ، 312-333. [ Google Scholar ] [ CrossRef ]
- Wertheimer, M. Untersuchungen zur Lehre von der Gestalt. II. روانی Res. 1923 ، 4 ، 301-350. [ Google Scholar ] [ CrossRef ]
- بوفه، ا. Serra, SR شناسایی ساختارهای فضایی در بلوک های شهری برای توصیف شهر. در مجموعه مقالات بیستمین کنفرانس بین المللی کارتوگرافی، پکن، چین، 6 تا 10 اوت 2001. صفحات 1974-1983.
- کریستف، اس. رواس، الف. تشخیص ترازهای ساختمان برای اهداف تعمیم. در پیشرفت در علم اطلاعات جغرافیایی ; Springer: برلین، آلمان، 2002; صص 419-432. [ Google Scholar ]
- یان، اچ. ویبل، آر. یانگ، بی. رویکرد چند پارامتری برای گروهبندی و تعمیم خودکار ساختمان. Geoinformatica 2008 ، 12 ، 73-89. [ Google Scholar ] [ CrossRef ]
- لی، ز. یان، اچ. آی، تی. چن، جی. تعمیم خودکار ساختمان بر اساس مورفولوژی شهری و نظریه گشتالت. بین المللی جی. جئوگر. Inf. علمی 2004 ، 18 ، 513-534. [ Google Scholar ] [ CrossRef ]
- چودری، او. Mackaness، WA شناسایی خودکار مرزهای سکونتگاه شهری برای پایگاههای اطلاعاتی چندگانه. محاسبه کنید. محیط زیست سیستم شهری 2008 ، 32 ، 95-109. [ Google Scholar ] [ CrossRef ]
- دیدگاه های Bundesregierung برای آلمان: استراتژی ما برای توسعه پایدار. در دسترس آنلاین: https://www.nachhaltigkeitsrat.de/fileadmin/user_upload/English/pdf/Perspectives_for_Germany.pdf (در 23 آوریل 2016 دسترسی پیدا کرد).
- کمیسیون اروپایی. نقشه راه اروپای کارآمد از منابع (COM (2011) 571). در دسترس به صورت آنلاین: http://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:52011DC0571&from=EN (در 23 آوریل 2016 قابل دسترسی است).
- سیاست علم برای محیط زیست: تا سال 2050 زمین خالص تصرف نمی شود؟ Future Brief 14. برای DG Environment کمیسیون اروپا توسط واحد ارتباطات علوم، UWE، بریستول تولید شده است. در دسترس آنلاین: http://ec.europa.eu/science-environment-policy (در 3 اوت 2016 قابل دسترسی است).
- باتیس، یو. کراتزبرگر، ام. لوهر، R.-P. Baugesetzbuch/BauGB ; سیچ بک: مونیخ، آلمان، 2009. [ Google Scholar ]
- بروگلمان، اچ. دور، اچ. بانک، WJ; Korbmacher، A. Baugesetzbuch/Commentar ; Kohlhammer: Stuttgart، آلمان، 2011. [ Google Scholar ]
- شیلر، جی. بلوم، ا. هچت، ر. ماینل، جی. اورتل، اچ. فربر، یو. Petermann, E. Innenentwicklungspotenziale در آلمان: Ergebnisse einer bundesweiten Umfrage und Möglichkeiten einer automatisierten Abschätzung ; Bundesinstitut für Bau-, Stadt-und Raumforschung (BBSR) im Bundesamt für Bauwesen und Raumordnung (BBR): بن، آلمان، 2013. [ Google Scholar ]
- الگندی، اچ. Michels, S. Raum+ Rheinland-Pfalz 2010: Die Bewertung von Flächenpotenzialen für eine zukunftsfähige Siedlungsentwicklung ; وزیریوم فور ویرتشافت، انرژی، کلیماسچوتز و زمین پلانونگ: ماینتس، آلمان، 2011. [ Google Scholar ]
- AdV AdV Documentation zur Modellierung der Geoinformationen des amtlichen Vermessungswesens (GeoInfoDok)—Erläuterungen zu ALKIS ® . نسخه 6.0.1; Arbeitsgemeinschaft der Vermessungsverwaltungen der Länder der Bundesrepublik Deutschland: آلمان، 2008.
- شیلر، جی. اورتل، اچ. Blum، A. Innenentwicklungspotenziale در Deutschland-Ergebnisse einer bundesweiten Befragung. در Flächennutzungsmonitoring V – Methodik, Analyseergebnisse, Flächenmanagement ; Rhombos: برلین، آلمان، 2013; صص 51-59. [ Google Scholar ]
- منابع ArcGIS مناطق ساخته شده را مشخص می کند. در دسترس آنلاین: http://resources.arcgis.com/en/help/main/10.1/index.html#//007000000047000000 (در 23 آوریل 2016 قابل دسترسی است).
- Alpaydin, E. Introduction to Machine Learning ; انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- منابع ArcGIS چگونه تراکم خط کار می کند. در دسترس آنلاین: http://resources.arcgis.com/en/help/main/10.1/index.html#/How_Line_Density_works/009z00000012000000/ (در 23 آوریل 2016 دسترسی پیدا کرد).
- Mackaness، WA; رواس، الف. ارزیابی در فرآیند تعمیم نقشه. در تعمیم اطلاعات جغرافیایی: مدلسازی نقشه برداری و کاربردها ; Sarjakoski, LT, Ruas, A., Mackaness, W., Eds.; الزویر: آکسفورد، انگلستان، 2007; صص 89-112. [ Google Scholar ]
- تیویت، اچ. Langaas، S. یک روش ارزیابی دقت برای مجموعه داده های خط جغرافیایی بر اساس بافر. بین المللی جی. جئوگر. Inf. علمی 1999 ، 13 ، 27-47. [ Google Scholar ] [ CrossRef ]
- وتر، ا. ویگلی، ام. کافرله، دی. گارتنر، جی. تعمیم خودکار چند ضلعی های ساختمانی با ابزارهای استاندارد arcGIS بر اساس سری نقشه های ملی سوئیس 1:50000. در مجموعه مقالات هجدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، ریودوژانیرو، برزیل، 21 اوت 2015.
- چودری، او. Mackaness، W. تجسم سکونتگاه ها در طول تغییرات بزرگ در مقیاس. در مجموعه مقالات نهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، لاکرونیا، اسپانیا، 7-8 ژوئیه 2005.
- هچت، ر. ماینل، جی. Buchroithner، MF شناسایی خودکار انواع ساختمان ها بر اساس پایگاه های داده توپوگرافی – مقایسه منابع داده های مختلف. بین المللی جی. کارتوگر. 2015 . [ Google Scholar ] [ CrossRef ]
- ماس، J.-F. سوآرس فیلهو، بی. پونتیوس، آر.جی. فارفان گوتیرز، م. Rodrigues, H. مجموعه ای از ابزارها برای تجزیه و تحلیل ROC مدل های فضایی. ISPRS Int. J. Geo Inf. 2013 ، 2 ، 869-887. [ Google Scholar ] [ CrossRef ]
- بوکیس، ک. مایر، اچ. Rabe, E. Die Ermittlung der praktischen Grundlagen für die Festlegungen im Regionalen Raumordnungsprogramm 2005. In Steuerung der Eigenentwicklung in Ländlichen Siedlungen—Baustein Einer Nachhaltigen Flächenikhaushalts ; Beiträge zur regionalen Entwicklung; 123، منطقه هانوفر: هانوفر، آلمان، 2009; ص 29-43. [ Google Scholar ]
- چسنوکوا، او. بوفات، آر. سیبر، آر. Hurni, L. به تصویر کشیدن روند کار توسعه – استخراج و تجسم شهرک. در مجموعه مقالات بیست و هفتمین کنفرانس بین المللی کارتوگرافی – شانزدهمین مجمع عمومی، ریودوژانیرو، برزیل، 23 تا 28 اوت 2015.
- پروست، اف جی. فاوست، تی. کهوی، ر. موردی در برابر تخمین دقت برای مقایسه الگوریتمهای القایی. در مجموعه مقالات پنجمین کنفرانس بین المللی ICML در مورد یادگیری ماشین، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 24 تا 27 ژوئیه 1998.
- Kotsiantis، SB; زهارکیس، آی. پینتلاس، پی. یادگیری ماشینی نظارت شده: مروری بر تکنیک های طبقه بندی. Informatica 2007 ، 31 ، 249-268. [ Google Scholar ]
- هاگدورن، ام. Veltkamp، RC دولت از هنر در تطبیق شکل. در اصول بازیابی اطلاعات بصری ; پیشرفت در تشخیص الگو؛ Springer: برلین، آلمان، 2001; صص 87-119. [ Google Scholar ]
- Mustière, S. تعمیم نقشه برداری جاده ها در یک رویکرد محلی و تطبیقی: یک مشکل کسب دانش. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 937-955. [ Google Scholar ] [ CrossRef ]
- اشتاینیگر، اس. لانگ، تی. بورگاردت، دی. وایبل، آر. رویکردی برای طبقهبندی سازههای ساختمانی شهری بر اساس تکنیکهای تحلیل متمایز. ترانس. GIS 2008 ، 12 ، 31-59. [ Google Scholar ] [ CrossRef ]
- ماینل، جی. هچت، ر. هرولد، اچ. تجزیه و تحلیل موجودی ساختمان با استفاده از نقشه های توپوگرافی و GIS. ساختن. Res. Inf. 2009 ، 37 ، 468-482. [ Google Scholar ] [ CrossRef ]
- Bovet، J. Handelbare Flächenausweisungsrechte als Steuerungsinstrument zur Reduzierung der Flächeninanspruchnahme. نات. Recht 2006 ، 28 ، 473-479. [ Google Scholar ] [ CrossRef ]
- هنگر، آر. Bizer, K. مجوزهای برنامه ریزی قابل تجارت برای کنترل کاربری زمین در آلمان. سیاست کاربری زمین 2010 ، 27 ، 843-852. [ Google Scholar ] [ CrossRef ]
- اشمیت، تی . Flächenhandel—Informationspapier Nr. 3; Büro für Standortplanung Hamburg: هامبورگ، آلمان، 2014. [ Google Scholar ]
- هرولد، اچ. یک رویکرد تکاملی به تجزیه و تحلیل تصویر تطبیقی برای بازیابی و نظارت بلندمدت استفاده تاریخی از زمین از منابع نقشه ناهمگن فضایی-زمانی. Ph.D. پایان نامه، دانشگاه صنعتی درسدن، درسدن، آلمان، 2015. [ Google Scholar ]
- Muhs، S. هرولد، اچ. ماینل، جی. بورگاردت، دی. کرچمر، او. ترسیم خودکار منطقه ساخته شده در سطح بلوک شهری از نقشه های توپوگرافی. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 58 ، 71-84. [ Google Scholar ] [ CrossRef ]
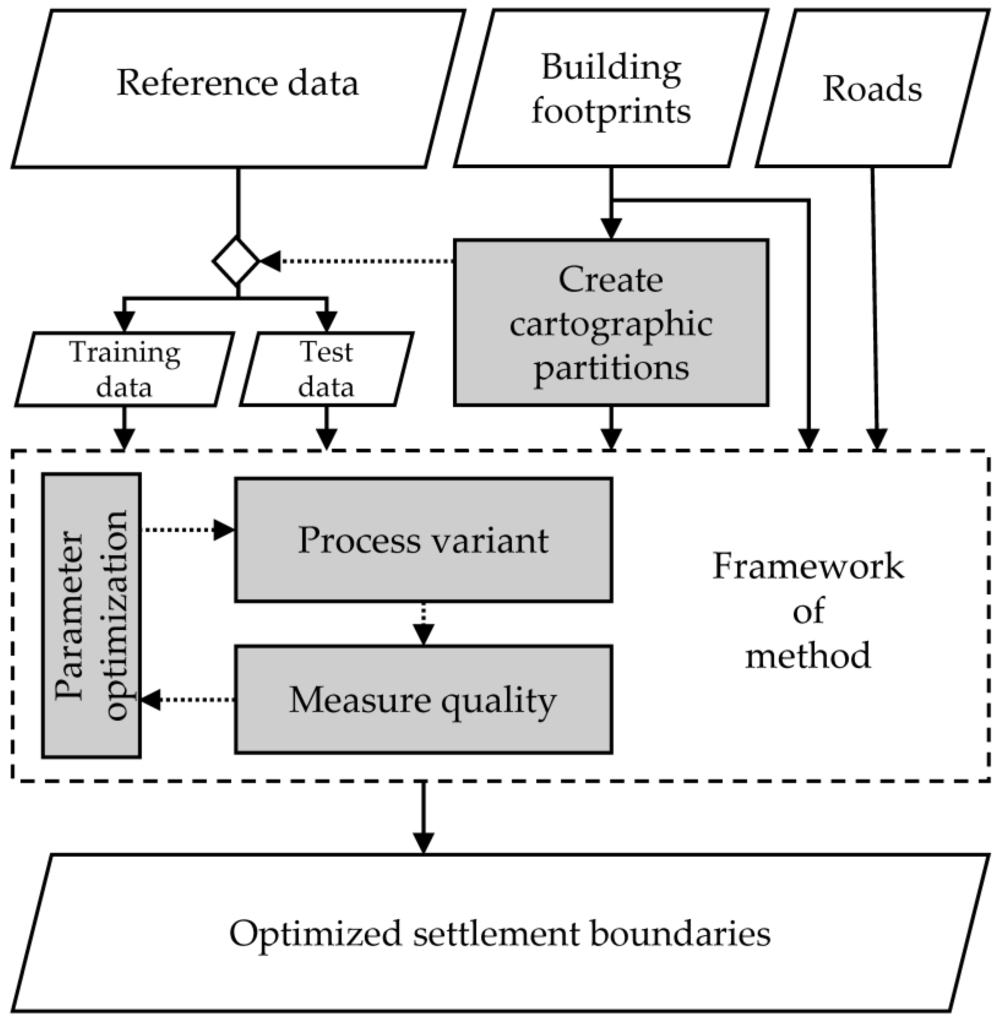
شکل 1. نمودار فرآیند.
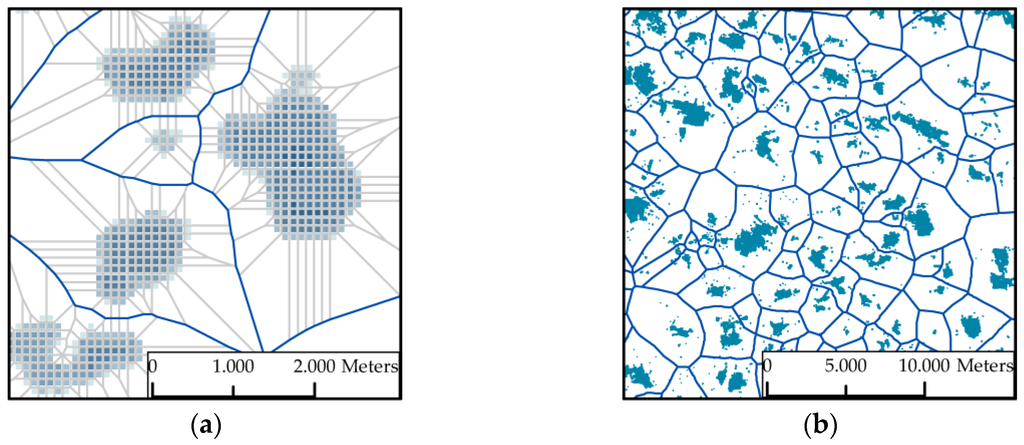
شکل 2. فرآیند پارتیشن بندی کارتوگرافی: ( الف ) نمودار Voronoi (خطوط خاکستری) و مش های باقی مانده (خطوط آبی تیره) در نقشه چگالی. و ( ب ) ساختمان های اصلی (فیروزه ای) و مرزهای پارتیشن های نقشه کشی نهایی (خطوط آبی تیره).

شکل 3. نمونه هایی از سطوح مختلف تجمع با استفاده از ترکیبات پارامترهای مختلف (P 1 و P 2 ). ترسیم خودکار (مناطق آبی) در مقایسه با هندسه مرجع (خطوط سیاه) (چند ضلعی های رسمی ساختمان، ATKIS ® Base-DLM© Geobasis-DE/BKG (2011)): ( a ) P 1 10/P 2 10; ( ب ) P 1 40/P 2 40; و ( ج ) P 1 70/P 2 100.

شکل 4. نمونه ای از نمودار سطحی مقادیر کیفیت حاصل در ترکیبات پارامترهای مختلف.
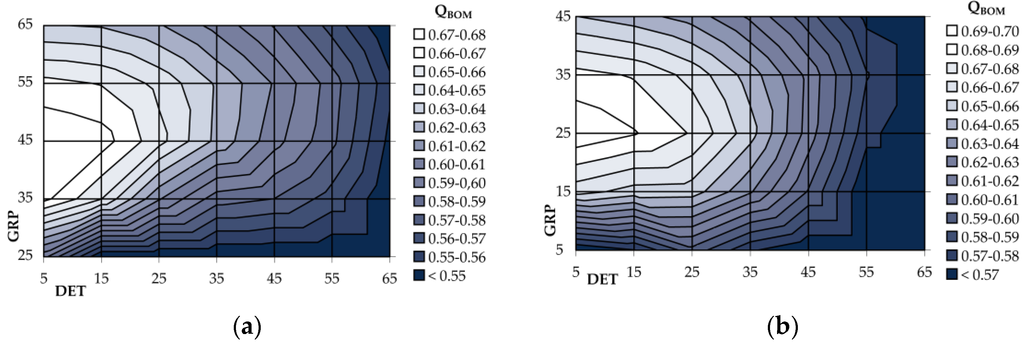
شکل 5. نمودار سطحی مقادیر Q BOM در ترکیبات پارامترهای مختلف از نوع DBA-BR ( a ). و نوع DBA-BRPPU ( b ).
شکل 6. نمودارهای جعبه مقادیر Q BOM برای ارزیابی تک ویژگی.

شکل 7. نمونه هایی از مرزهای بهینه شده: ( الف ) ATKIS ® -Ortslage; ( ب ) نوع DBA-B; ( ج ) نوع DBA-BR; ( د ) نوع DBA-BRPP; و ( ه ) نوع DBA-BRPPU (چند ضلعی های ساختمان رسمی، ATKIS® Base -DLM© Geobasis-DE/BKG (2011)).
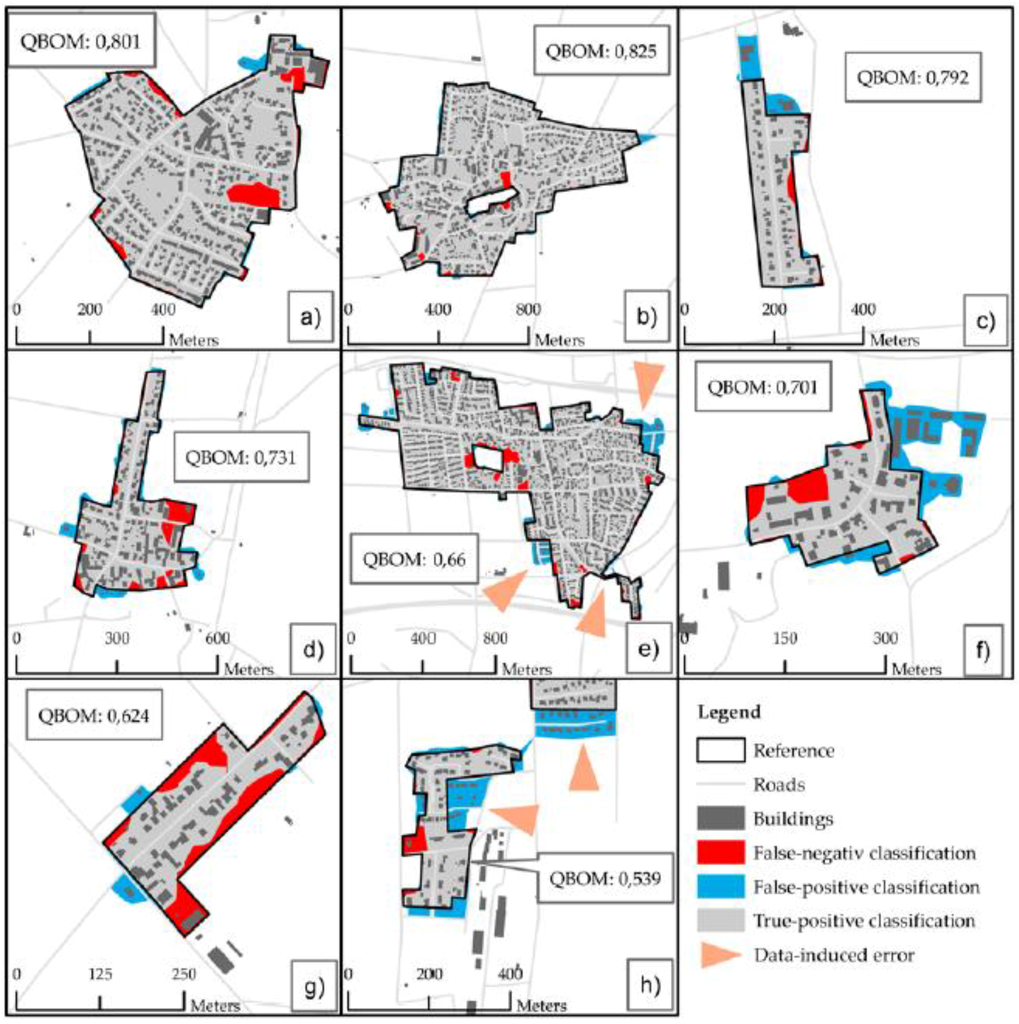
شکل 8. نمونه هایی از مرزهای بهینه شده نسبت به مرجع، ارزش کیفیت Q BOM و نتایج طبقه بندی نوع DPA-BRPP (چند ضلعی های ساختمان رسمی، ATKIS® Base -DLM ©Geobasis-DE/BKG (2011)): بدنه های حل و فصل (a) ) ویلکنبورگ، (ب) جینسن، (ج) گایلهوف ، ( د) رودنسن، (ه ) گودشورن، (و) اکرده، (گ ) کلاین کولشورن و (ه) وهمینگن

جدول 1. شرح پارامترهای ابزار “Delineate Built-Up Area” (برگرفته و اصلاح شده از [ 28 ]).
جدول 2. نمای کلی داده های ورودی.
جدول 3. نتایج ارزیابی تک ویژگی (بهترین مجموعه پارامتر DET/GRP؛ میانگین حسابی Ø، میانه m، محدوده به عنوان اختلاف مقدار حداکثر و حداقل و انحراف استاندارد σ Q BOM ) .
جدول 4. نتایج آزمون اهمیت ( p -value).
جدول 5. تعداد استقرارهای طبقه بندی شده مثبت واقعی (TP)، مثبت کاذب (FP) و منفی کاذب (FN).
جدول 6. منطقه مرجع، ترسیم، مثبت واقعی (RP)، مثبت کاذب (FP) و منفی کاذب (FN) سطح طبقه بندی شده در هکتار.
جدول 7. خطاهای رخ داده و ارزیابی کیفی آنها با استفاده از مثال نوع DBA-BRPP.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر