1. معرفی
فرآیندهای فیزیکی در جو یا اقیانوس، مانند تکامل بارش، جریان آب، انتشار ابرهای شیمیایی در اتمسفر و غیره را می توان با معادلات دیفرانسیل، به عنوان مثال، به منظور پیش بینی مدل سازی کرد. این مدل ها معمولاً مدل های فیزیکی نامیده می شوند. با این حال، فرآیند مدلسازی به دلیل تأثیر عوامل متعددی که اغلب فقط میتوانند تقریبی شوند، مانند اثرات ترمودینامیکی، تابش خورشیدی یا اثرات زمین، اغلب بسیار پیچیده است. علاوه بر این، برای پردازش کامپیوتری، حل معادلات دیفرانسیل معمولا پیچیده به صورت عددی ضروری است، به عنوان مثال، با استفاده از مدل های عددی پیش بینی آب و هوا، که نیاز به استفاده از منابع محاسباتی با کارایی بالا دارد. بنابراین، در کاربردهای خاص،1 ]. نمونه ای از این مدل های مبتنی بر داده یا تجربی، مدل مبتنی بر شبکه عصبی مصنوعی برای پیش بینی بارش-رواناب در هیدرولوژی است [ 2 ].
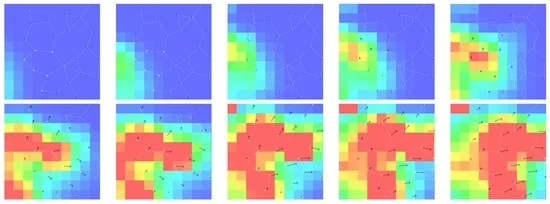
برای میدانهای جوی یا اقیانوسشناسی، روشهای مبتنی بر داده اغلب به جابجایی افقی ویژگیها یا میدانها مربوط میشوند (به نام فرارفت ). این روشها اغلب به میدانهای حرکتی متکی هستند که از دادههای فعلی و گذشته اخیر توسط تکنیکهای بینایی رایانهای، مانند جریان نوری (OF)، و زمانی که پیشبینی هدف است، بر برونیابی بعدی در زمان با استفاده از اطلاعات حرکت، تخمین زده میشوند. شکل 1 یک سری زمانی از تصاویر رادار آب و هوا را نشان می دهد که با 20 دقیقه (از چپ به راست) از هم جدا شده اند و بردارهای حرکت تخمین زده شده با استفاده از الگوریتم OF مبتنی بر تصویر (اجرای OpenCV الگوریتم ارائه شده توسط [3] ) .
گاهی اوقات، بهویژه برای مقیاسهای زمانی کوتاه، روشهای مبتنی بر دادههای مبتنی بر حرکت نه تنها نیازهای محاسباتی را کاهش میدهند، بلکه از مدلهای عددی نیز بهتر عمل میکنند. در [ 4 ]، می توان نشان داد که پخش کنونی بارش مبتنی بر رادار از مدل های پیش بینی عددی برای مقیاس های زمانی کمتر از 6 ساعت بهتر عمل می کند. رویکردهای متعددی وجود دارد که از بردارهای حرکت تخمینی استفاده می کند، نه تنها برای پیش بینی همانطور که در [ 5 ] انجام شده است. به عنوان مثال، در [ 6 ] نشان داده شده است که گنجاندن اطلاعات حرکت تخمین زده شده از رادار آب و هوا در درون یابی اندازه گیری های باران سنج، کیفیت درون یابی را بهبود می بخشد. مثال دیگر تخمین میدان های حرکتی از سنجش از دور است، به عنوان مثال، از تصاویر ماهواره ای اقیانوس شناسی. در [ 7]، رویکردی برای استخراج گردش سطح اقیانوس از اندازهگیریهای دمای سطح دریای مادون قرمز جمعآوریشده از راه دور توسط یک ماهواره معرفی شده است. سپس میدان حرکتی مشتقشده به منظور استخراج نمایشهایی از میدانها بدون نیاز به مدلهای فیزیکی پردازش میشود (مثالی که ذکر شد استخراج نقاط ثابت میدان جریان، مانند نقطه مرکزی یک طوفان است). همه این رویکردها از این نظر مشابه هستند که میدان های بردار حرکتی از تصاویر پدیده های محیطی تخمین زده می شوند. با این حال، تصاویر همیشه در دسترس نیستند، بلکه فقط اندازهگیریهای نقطهای توسط حسگرهای درجا جمعآوری شدهاند. مثالها شامل اندازهگیریهای بارانسنج بارش، تخمینهای بارندگی ارائهشده توسط خودروها ([ 8 ] یا [ 9] است.]) یا اندازه گیری دمای سطح دریا که توسط شناورهای آب و هوا جمع آوری شده است.
در این کار، بررسی میشود که چگونه میتوان حرکت میدانهای دینامیکی مکانی-زمانی را توسط حسگرهای درجا که بهطور نامنظم در فضا توزیع شدهاند، تخمین زد. فرض می شود که حسگرها به امکانات محاسباتی و ارتباطی متصل می شوند و بنابراین به عنوان گره های ارتباطی یک شبکه ژئوسنسور (GSN) در نظر گرفته می شوند. یک الگوریتم جریان نوری شناخته شده بهعنوان پایه استفاده میشود و با ویژگیهای GSN و میدانهای مکانی-زمانی، مانند بینظمی بودن نمونهها، محدودیتهای قوی در ارتباط و محاسبات و ثبات حرکت مفروض در دورههای نمونهبرداری، تنظیم میشود. به این ترتیب، پیکسل ها در تصاویر به نمونه های میدانی جمع آوری شده توسط یک گره، و همسایگی پیکسل به همسایگی گره در GSN ترجمه می شود.
-
دانش پیشینی از خواص حرکت: برای حرکت پدیده های محیطی، می توان دانش پیشینی از خواص حرکت میدان را فرض کرد. به عنوان مثال، آمار سرعت باد یا اطلاعاتی در مورد فرارفت ابرهای باران وجود دارد. این دانش دامنه را می توان برای تعیین پارامترهای مورد نیاز الگوریتم پیشنهادی استفاده کرد.
-
تداوم زمانی و یکنواختی فضایی حرکت: در تصاویر دلخواه، اجسام متحرک مانند اتومبیلها میتوانند اتفاق بیفتند که جهت خود را تغییر میدهند، توقف میکنند یا شتاب میگیرند، مثلاً در چند فریم. بنابراین، تداوم زمانی معمولاً فقط برای دوره های زمانی بسیار کوتاه باقی می ماند [ 10]. برای میدانهای جوی یا اقیانوسشناسی، این احتمال وجود دارد که حرکت در دورههای طولانی نمونهبرداری ثابت باشد، و بنابراین، ادغام اطلاعات حرکت در طول زمان اهمیت پیدا میکند. علاوه بر این، حرکت در تصاویر اغلب ناپیوستگی های حرکتی واضحی را نشان می دهد، به عنوان مثال، در مرزهای اجسام متحرک مانند اتومبیل هایی با حرکت مخالف که از کنار یکدیگر عبور می کنند. برای میدانهای جوی یا اقیانوسشناسی، ناپیوستگیهای حرکتی تند را میتوان بعید در نظر گرفت: آنها ممکن است فقط در مرزهای میدان، به عنوان مثال، در مرزهای ابرهای بارانی ایجاد شوند. با این حال، پس از آن، آنها در واقعیت وجود ندارند (یعنی جو اطراف ابر بارانی نیز حرکت می کند)، اما بر الگوریتم تخمین حرکت که بر اساس اندازه گیری های میدانی است، تأثیر می گذارد. به عنوان مثال، در حالی که اتمسفر همچنان در زمانی که باران وجود ندارد حرکت می کند،
-
استقرار کنترل شده گره، سرعت نمونه برداری و داده های نامنظم: در جریان نوری مبتنی بر تصویر، پیکسل ها مکان های نمونه برداری را تعیین می کنند و سرعت و جهت حرکت تحت تأثیر عوامل متعددی مانند وضوح مکانی و جهت گیری تصویر، سرعت نمونه برداری، فاصله فضایی دوربین تا جسم متحرک و همچنین سرعت و جهت حرکت جسم متحرک. هنگامی که قرار است حرکت با یک GSN مستقر در داخل (یعنی در محل) و سنجش میدان تخمین زده شود، استقرار گره و نرخ نمونهبرداری را میتوان تا حد معینی کنترل کرد، به عنوان مثال، فاصله گره نسبت به حرکت میدان فرضی. با این حال، در حالی که رویکردهای جریان نوری مبتنی بر تصویر معمولاً به شبکههای معمولی (یعنی تصاویر) متکی هستند، استقرار شبکهمانند گرهها ممکن است امکانپذیر نباشد.
-
تخمین غیرمتمرکز: OF مبتنی بر تصویر معمولاً به یک رایانه تکیه میکند که میدان حرکت را از روی تصاویر تخمین میزند. با یک GSN، تخمین غیرمتمرکز حرکت توسط هر گره ممکن است و به طور بالقوه مطلوب به دلایل متعددی است که در بخش بعدی توضیح داده شده است.
2. سهم این اثر و تفاوت با کار قبلی
الگوریتم پیشنهادی مبتنی بر روش OF مبتنی بر گرادیان است، اما تفاوت های ذکر شده را با OF مبتنی بر تصویر در نظر می گیرد. مشابه تخمین حرکت در تصاویر، تخمین را می توان توسط یک گره مرکزی که تمام داده ها را جمع آوری می کند، انجام داد. در اینجا، یک الگوریتم غیرمتمرکز هدفی است که در آن هیچ گره مرکزی برای جمعآوری و پردازش دادهها وجود ندارد، اما هر گره تخمین حرکت فعلی را دارد و به صورت محلی با همسایگان ارتباط برقرار میکند. اگرچه یک راه حل متمرکز که همه داده ها را یکپارچه می کند همیشه از نظر دقت از راه حل های غیرمتمرکز بهتر عمل می کند، دومی مزایای خاصی دارد (مقیاس پذیری، تأخیر، محدودیت های انرژی، حریم خصوصی، شبکه های حسگر/محرک، اضافه بار اطلاعات [11] ) . در اصل، تمام مزایا برای کار ما صدق می کند. مهمترین آنها در نظر گرفته شده استمقیاسپذیری ، فرآیند را مستقل از تعداد گرهها میکند و امکان افزودن و حذف گرهها را در لحظه فراهم میکند. علاوه بر این، تأخیر ارتباط را می توان با تمرکززدایی کاهش داد، به خصوص اگر اطلاعات در تنظیمات حسگر/محرک نزدیک به مکان مکانی جایی که تولید می شود استفاده شود. نمونه ای از این تخمین حرکت میدان بارش توسط VANET ها است، که در آن اطلاعات حرکت بارندگی شدید برای خودروهای منطقه مهم است، به عنوان مثال، برای شروع پیام های هشدار در مورد نزدیک شدن به بارش شدید.
این حالت غیرمتمرکز شبیه به روش OF مبتنی بر تصویر ارائه شده در [ 12 ] است که اطلاعات در همسایگی یک گره ادغام شده است (به عبارت دیگر پیکسل در [ 12 ]). بنابراین، فرض حرکت انتقالی محلی در همسایگی گره اعمال میشود (افزودنهای احتمالی برای این فرض شناخته شدهاند و به عنوان مثال، در [ 10 ] توضیح داده شدهاند). بی نظمی مکانی داده ها توسط یک مدل خطای احتمالی محاسبه می شود. به منظور محاسبه انسجام حرکت در دورههای نمونهبرداری، تخمین حرکت به عنوان یک رگرسیون بازگشتی در قالب یک فیلتر کالمن [ 13 ] فرموله میشود. این الگوریتم قبلاً در [ 14] معرفی شده است] و اکنون در راستای خطوط زیر توسعه یافته است:
-
کار قبلی شامل یک مدل خطای موقتی برای مشاهدات فردی بود. در اینجا، یک مدل خطای پیچیدهتر و احتمالاتی معرفی میشود و ارزیابیهای گسترده سودمندی مدل را نشان میدهد.
-
یک رسمی سازی عمومی تر از الگوریتم جریان نوری ارائه شده است که تغییرات احتمالی در حرکت در طول زمان را توضیح می دهد.
-
الگوریتم در امتداد معیارهای خطای تفاوت در سرعت حرکت و جهت حرکت بین حرکت واقعی و تخمینی ارزیابی میشود. تفاوت زاویه ای یک معیار خطای رایج برای رویکردهای جریان نوری است [ 15 ]. سرعت حرکت از دیگر ویژگی های مهم حرکت در نظر گرفته می شود.
-
شبیه سازی های جامع تر عملکرد الگوریتم را در شرایط مختلف نشان می دهد. علاوه بر این، الگوریتم برای دادههای نمونهبرداری GSN شبیهسازی شده از تصاویر رادار آبوهوا جمعآوریشده در طول یک رویداد بارش اعمال میشود و عملکرد تخمین حرکت GSN با الگوریتم جریان نوری مبتنی بر تصویر پیشرفته مقایسه میشود. رادار هواشناسی به طور مستقیم، که یک رویکرد رایج از Nowcasting است [ 5 ]. به این ترتیب می توان کامل ترین اطلاعات از تصاویر رادار را با اطلاعات پراکنده از گره ها مقایسه کرد.
این مقاله به شرح زیر سازماندهی شده است: در بخش 3 ، دانش پس زمینه لازم در مورد روش های جریان نوری مبتنی بر گرادیان، و همچنین مجموعه ای از کارهای مرتبط ارائه شده است. بخش 4 شرحی از روش برای تخمین حرکت با GSN ارائه می دهد. در بخش 5 ، الگوریتم با استفاده از میدان های شبیه سازی شده و همچنین میدان های برآورد شده از رادار هواشناسی ارزیابی می شود. بخش 6 یک بحث پایانی در مورد نتایج و محدودیتهای بالقوه الگوریتم ارائه میکند، یافتههای اصلی را خلاصه میکند و چشماندازی برای توسعههای آینده ارائه میدهد.
3. پیشینه و کارهای مرتبط
3.1. کار مرتبط
مقدار قابل توجهی کار بر روی تخمین ویژگیهای میدانهای مکانی-زمانی پویا با GSN وجود دارد. مشکلات شامل برآورد مرزهای میدان [ 16 ]، شناسایی یک نقطه بحرانی، مانند قله ها و گودال ها [ 17 ]، یا حتی درون یابی فضایی در شبکه [ 18 ] است. کتاب داکهام [ 11 ] نمای کلی کاملی از این موضوع و همچنین شرحی از مزایای محاسبات غیرمتمرکز در شبکه ارائه میکند، که برای کار ارائه شده در این مقاله نیز کاربرد دارد. یکی دیگر از خطوط تحقیقاتی مرتبط با کار ما، ردیابی (دنبال کردن) ویژگیهای مکانی-زمانی منتقلشده توسط گرههای متحرک است [ 19 ، 20]]. در حالی که در این آثار، گرههای متحرک فرض میشوند که میتوانند خود به خود حرکت کنند یا با میدان حرکت کنند (مثلاً شناورهایی که توسط جریانهای اقیانوسی حرکت میکنند)، کار ما شبکهای از گرههای ثابت را فرض میکند (یا اتومبیلهایی که حرکت آنها توسط شبکه جادهای از پیش تعیین شده است). و هدف آن تخمین حرکت از سری زمانی اندازهگیریهای حسگر جمعآوریشده توسط گرهها است. علاوه بر این، مقدار قابل توجهی کار روی ردیابی شی با GSN ها وجود دارد، به عنوان مثال، تولید اطلاعات در مسیر یک شی متحرک بدون اینکه لزوماً آن را دنبال کند، مانند [ 21 ]. با این حال، تا جایی که میدانیم، مشکل تخمین حرکت میدان (نه شی) با یک GSN تاکنون حل نشده است.
3.2. مدل شبکه و میدان
یک GSN به عنوان یک نمودار مدلسازی میشود جی=(V،E)که در آن V مجموعه ای از گره های توزیع شده در صفحه و E مجموعه ای از پیوندهای ارتباطی بین گره ها است. پیوندهای ارتباطی دوسویه مجاز تنها با حداکثر فاصله ارتباطی اقلیدسی r (فاصله واحد) در صفحه تعیین میشوند و از این رو، G یک نمودار دیسک واحد است (UDG، [ 11 ]). یک گره nمن∈Vموقعیت خود را می داند سمن=(ایکسمن،yمن)در هواپیما، به عنوان مثال، با استفاده از سیستم موقعیت یاب جهانی (GPS). علاوه بر این، گره ها می توانند یک میدان مکانی-زمانی اسکالر با ارزش واقعی را حس کنند. ز(تو):آر2×آر→آرجایی که تو=[ایکس،y،تی]تیمکانی در مکعب فضا-زمان (و []تیانتقال ماتریس را نشان می دهد). یک سنسور خاص اندازه گیری گره nمندر زمان گام t با نشان داده می شود z(تومن،تی)جایی که تومن،تی=[ایکسمن،yمن،تی]تی. مشتقات جزئی میدان در امتداد محورهای فضایی X و Y و محور زمانی T در یک مکان مکانی-زمانی خاص u به صورت نوشته میشوند .زایکس“(تو)، زY“(تو)و زتی“(تو). برآورد آنها توسط یک گره ارائه شده است nمندر زمان t با نشان داده می شوند z^ایکس“(تومن،تی)، z^Y“(تومن،تی)و z^تی“(تومن،تی). سپس بردار ستونی مشتقات جزئی تخمین زده شده به صورت نوشته می شود z^“(تومن،تی)=[z^ایکس“(تومن،تی)،z^Y“(تومن،تی)،z^تی“(تومن،تی)]تی.
3.3. جریان نوری: مبانی
روشهای جریان نوری، مانند [ 12 ] یا [ 22 ]، معمولاً برای تخمین جابجایی پیکسل (حرکت) بین دو تصویر استفاده میشوند. فرض اساسی بیشتر رویکردهای جریان نوری این است که شدت (مقادیر پیکسل / میدان) بین دورههای نمونهبرداری ثابت میماند و تغییر در مقادیر برای یک مکان خاص صرفاً از حرکت میدان ناشی میشود. به طور رسمی، این بدان معنی است که یک بردار در مکعب فضا-زمان وجود دارد ساعت=[Δایکس،Δy،Δتی]تیبه طوری که معادله ( 1 ) برقرار است.
روشهای جریان نوری را میتوان به دو دسته طبقهبندی کرد: روشهایی که از مشتقات جزئی در فضا و زمان برای تخمین استفاده میکنند و روشهایی که از تطبیق بخشهای تصویر (همچنین به عنوان تطبیق بلوک نیز شناخته میشوند) [10 ] . بکارگیری روشهای تطبیق بلوک برای دادههای نامنظم نیاز به درونیابی دادههای نامنظم در شبکههای معمولی دارد، که مفروضات بیشتری را در مورد ساختار میدان ارائه میکند. در عوض، یک رویکرد مبتنی بر گرادیان انتخاب میشود که در آن مشتقات جزئی از دادههای نامنظم با استفاده از تعدیل حداقل مربعات تخمین زده میشوند. آن روش های مبتنی بر گرادیان بر این فرض استوارند که بسط مقادیر مرتبه اول سری تیلور، همانطور که در معادله ( 2 ) نشان داده شده است، کافی است.
جایی که زایکس“، زY“و زتی“مشتقات جزئی در مکعب فضا-زمان هستند. معادله ( 2 ) فرض خطی بودن جریان نوری نامیده می شود، زیرا اصطلاحات مرتبه بالاتر نادیده گرفته می شوند. ترکیب ( 1 ) و ( 2 ) و تقسیم بر Δتیسپس به معادله ( 3 ) محدودیت گرادیان (GC) منجر می شود.
معادله نمونه ( 3 ) به برآورد مشتقات جزئی نیاز دارد. معمولاً آنها با تمایز عددی با استفاده از مقادیر پیکسل همسایه (در مکان و زمان) برآورد می شوند. تخمین جریان نوری vایکس=Δایکس/Δتیو vY=Δy/Δتیسپس حداقل به دو محدودیت گرادیان نیاز دارد تا یکپارچه شود. فرض خطی بودن معادله ( 2 ) نشان می دهد که طول جابجایی h بر دقت تخمین حرکت تأثیر دارد: هر چه جابجایی کوتاهتر باشد، بسط رابطه ( 2 ) معتبرتر است و بنابراین، تخمین حرکت دقیق تر است. . همچنین بین درجه خطی بودن میدان و دقت تخمین حرکت یک تداخل وجود دارد: برای یک میدان خطی، معادله ( 2 ) دقیقاً برقرار است (≅ را می توان با = جایگزین کرد).
4. روش شناسی
الگوریتم غیرمتمرکز پیشنهادی برای تخمین حرکت از دو بخش تشکیل شده است:
-
برآورد محدودیت گرادیان : تخمین یک محدودیت گرادیان در یک گره nمندر زمان tz^ایکس“(تومن،تی)، z^Y“(تومن،تی)و z^تی“(تومن،تی)، از اندازه گیری های حسگر گره های همسایه محاسبه می شوند. خطای یک GC از پیکربندی فضایی همسایگی گره مشتق شده است. جزئیات در بخش 4.1 آورده شده است .
-
تخمین حرکت : مجموعه ای از تخمین ها از محدودیت های گرادیان در هر مرحله زمانی t توسط هر گره ادغام می شود.nمندر همسایگی 1-hop مستقیم آن برای حل اجزای حرکت. جزئیات بیشتر در بخش 4.2 ارائه شده است .
در پیوست A ، پروتکل الگوریتم ارائه شده است. جزئیات بیشتر در مورد معادلات درگیر، به عنوان مثال، معادلات عادی برای حل یک مسئله حداقل مربعات، در انتشار قبلی در مورد موضوع [ 14 ] ارائه شده است.
4.1. برآورد محدودیت گرادیان
روش برای تخمین حرکت غیرمتمرکز مبتنی بر گرادیان با یک GSN ثابت به تفصیل در [ 14 ] توضیح داده شده است. به طور خلاصه، نمونه برداری نامنظم از داده ها نیاز به تخمین غیرمستقیم دارد زایکس“(تو)، زY“(تو)و زتی“(تو)توسط تخمین های عددی مشتقات جهتی محاسبه شده از نمونه های حسگر که به طور نامنظم در فضا و زمان توزیع شده اند (معادله ( 4 )).
جایی که دمنj،تیrبردار فاصله زمانی – مکانی بین مکانهای گره مکانی – زمانی است تومن،تیو توj،r(محل گره i در زمان t و گره j در زمان r )، و z(تومن،تی)و z(توj،r)نمونه های میدانی در این مکان ها هستند که توسط گره ها جمع آوری شده اند. رابطه عملکردی بین برآورد چنین مشتق جهتی و مشتقات جزئی در امتداد محورهای مختصات مکعب فضا-زمان در معادله ( 5 ) نمایش داده شده است (برای سهولت خوانایی، شاخص مکان مکانی – زمانی تومن،تیدر معادله زیر حذف شده است).
جایی که تو^ایکس،د، تو^Y،دو تو^تی،دمولفه های بردار واحد در جهت مکانی-زمانی خاص d هستند ، z^د“تخمین خاصی از یک مشتق جهتی است که با معادله ( 4 ) محاسبه می شود و z^ایکس“، z^Y“و z^تی“تخمینی از مشتقات جزئی مورد نیاز برای جریان نوری است. مجموعه ای از چنین معادلات خطی موجود در یک موقعیت گره مکانی-زمانی خاص تومن،تیسپس یک سیستم خطی از شکل معادله ( 6 ) را تشکیل می دهد.
جایی که آ(تومن،تی)ماتریسی است که بردارهای واحد را به صورت ردیف در بر می گیرد، z^“(تومن،تی)=[z^ایکس“(تومن،تی)،z^Y“(تومن،تی)،z^تی“(تومن،تی)]تیبردار ستونی مشتقات جزئی است که باید تخمین زده شود، به عنوان مثال، z^“(تومن،تی)تخمینی از محدودیت گرادیان معادله ( 3 ) است. ب^(تومن،تی)بردار ستونی برآورد مشتقات جهتی است. سپس سیستم اجازه می دهد تا برای z^“(تومن،تی)به عنوان مثال، با تنظیم حداقل مربعات معمولی (OLS) یا تنظیم حداقل مربعات وزنی (WLS) با ماتریس وزن مشخص W برای مشاهدات (جزئیات بیشتر در مورد رویکرد، به عنوان مثال، معادلات عادی برای حل مسئله حداقل مربعات، در [ 14 ]).
4.1.1. ثابت بودن گره ها
به عنوان بردار فاصله دمنj،تیrیک بردار در فضا و زمان، محاسبه طول است |دمنj،تیr|نیاز به مشخصات پیشینی یک عامل ناهمسانگردی مکانی-زمانی، مانند تصمیم گیری در مورد واحد اندازه گیری دارد. اگر این دانش به صورت پیشینی در دسترس باشد، گره ها مجاز هستند که به صورت ناهمزمان، یعنی در مراحل زمانی مختلف، از فیلد حرکت کرده و نمونه برداری کنند. در این کار، فرض بر این است که عامل ناهمسانگردی شناخته شده نیست، و مفروضات ایستایی گره و همزمانی زمانی ضروری هستند ( برای توضیح کامل تر در مورد این موضوع به [ 14 ] مراجعه کنید). در این مورد، فضا را می توان جدا از زمان در نظر گرفت: سیستم خطی فقط مشتقات مکانی را شامل می شود، در حالی که تغییر زمانی را می توان توسط هر گره به طور جداگانه از تفاوت نمونه میدان فعلی و قبلی اندازه گیری شده توسط آن گره تخمین زد: z^تی“(تومن،تی)=z(تومن،تی)–z(تومن،تی–1). با این پیکربندی فضایی ثابت، ماتریس آ(تومن،تی)در سیستم خطی معادله ( 6 ) مستقل از زمان و برای هر گره ثابت است nمن( نشان داده شده است آمندر زیر) و معادلات عادی برای حل سیستم را می توان در مرحله اولیه الگوریتم از قبل محاسبه کرد ( پیوست A ). واضح است که این فرض برای گره های غیر ثابت و متحرک، به عنوان مثال، اتومبیل ها صادق نیست. با این وجود، در بخش 5 ، الگوریتم در یک محیط غیر ثابت با اتومبیل های شبیه سازی شده، با تغییرات جزئی که در ضمیمه A شرح داده شده است، اعمال می شود .
4.1.2. خطا در محاسبه مشتق
از آنجایی که، به دلیل ایستایی گره، تغییر در امتداد محور زمان را می توان به طور مستقیم توسط هر گره با تفاضل معکوس تخمین زد، بدون خطا برای مشتق زمانی تخمین زده شده z^تی“(تومن،تی)فرض بر این است. برای تخمین خطا (و بنابراین، وزنها در تنظیم WLS) مرتبط با تخمین یک مشتق جهتی خاص در فضا، از اکتشافی نمایش داده شده در معادله ( 7 ) استفاده میشود:
که r حداکثر محدوده ارتباطی ممکن بین گره ها و دمنjفاصله فضایی بین دو گره است nمنو nj. ماتریس وزن دبلیومندر تنظیم WLS سپس حاوی معکوس است ϵمنjبه عنوان وزن مورب و صفر در جاهای دیگر، زیرا هیچ وابستگی بین مشاهدات فرض نمی شود. به دلیل ثابت بودن گره ها، دبلیومنبرای هر گره ثابت است و می توان آن را از پیش محاسبه کرد. از تعریف مشتقات جهتی ارائه شده در [ 14 ]، واضح است که هر چه دو اندازه گیری نزدیکتر باشند، تمایز عددی معادله ( 4 ) مشتق جهتی واقعی را تقریب می کند. این وزن خاص با اندازهگیریهای کاهش وزن همراه با افزایش فاصله فضایی از گره برآورد، این امر را نشان میدهد. تقسیم فاصله بر دامنه ارتباط تضمین می کند که وزن پایین قابل توجه و مستقل از واحد اندازه گیری فاصله مکانی است. سودمندی این وزن دهی در مقایسه با وزن دهی یکنواخت در ارزیابی ارائه شده در بخش 5.4.3 نشان داده شده است.. سپس خطای مرتبط با مشتقات جزئی مشتق شده را می توان از روی خطاهای مشتق جهتی منفرد با استفاده از قانون انتشار خطا تخمین زد (به عنوان مثال، [23، 24 ] یا هر کتاب درسی ژئودتیک را ببینید):
جایی که سیجیسیمنهست 2×2به اصطلاح ماتریس کوفاکتور از 2×1بردار مشتقات جزئی فضایی تخمین زده شده z^“(تومن،تی)=[z^ایکس“(تومن،تی)،z^Y“(تومن،تی)]تی. از آنجایی که گره ها ثابت فرض می شوند، ماتریس می شوند آمنو ماتریس وزن دبلیومنثابت هستند و از این رو سیجیسیمنبرای یک گره خاص ثابت است nمنو همچنین می تواند از قبل محاسبه شود ( پیوست A ). از آنجایی که ویژگی های میدان در معادله ( 8 ) نادیده گرفته شده است ،سیجیسیمنیک ماتریس کوواریانس مناسب نیست و ورودی های مورب سیجیسیمنمطلق نیستند، بلکه فقط نمایش نسبی خطاهای مشتقات جزئی برآورد شده هستند z^ایکس“(تومن،تی)و z^Y“(تومن،تی)توسط آن گره برآورد شده است ([ 24 ]). بنابراین، به منظور استخراج یک ماتریس کوواریانس معتبر برای هر یک z^“(تومن،تی)توسط گره ارائه شده است nمن، مدخل های سیجیسیمنباید به سطح خطای مناسب برای میدان خاص مورد نظر و برای مرحله زمانی خاص t تبدیل شود . یک رویکرد رایج در تعدیل حداقل مربعات این است که یک به اصطلاح ضریب واریانس را از تعدیل حداقل مربعات بدست آوریم و آن را ضرب کنیم سیجیسیمنبرای استخراج ماتریس کوواریانس تجربی برای مشتقات جزئی برآورد شده z^“(تومن،تی)در گره nمندر زمان t :
فاکتور واریانس مورد نیاز σ^2(تومن،تی)قابل محاسبه با:
جایی که v(تومن،تی)بردار ستونی انحرافات تنظیم حداقل مربعات برای گره است nمندر زمان t (یعنی شامل نتیجه از z^ایکس“تو^ایکس،د+z^Y“تو^Y،د–z^د“به عنوان ورودی ردیف برای هر مشتق جهتی/گره همسایه در زمان t ). f=متر–پدرجه آزادی است که m تعداد همسایگان یک گره و p تعداد پارامترها است ( پ=2برای مورد ثابت). محاسبه ضریب واریانس یک رویکرد رایج در تنظیم حداقل مربعات است، به عنوان مثال، برای موقعیت یابی GPS [ 23 ]، به منظور کمی سازی خطای پارامترها/ضرایب مشتق شده. در این حالت خطای حداقل مربعات حاصل می شود z^“(تومن،تی). با این حال، محاسبه یک پایدار σ^2(تومن،تی)در هر مرحله زمانی t معمولاً به درجات آزادی کافی به ترتیب p تا نیاز دارد2پ[ 24 ]. بنابراین، برای یک f به اندازه کافی بزرگ ، یک گره باید 4 تا 6 همسایه داشته باشد (یعنی 6 تا 9). بنابراین، یک عامل واریانس پیشینی در زیر استفاده می شود که برابر با تمام گره ها است و با نشان داده می شود σ^2، که با این حال از مقادیر مشاهده شده برای σ^2(تومن،تی). مزیت خاص استفاده از ضریب واریانس از پیش محاسبه شده این است که در یک محیط ثابت، ضریب واریانس σ^2(تومن،تی)برای یک گره nمنثابت است و بنابراین، ماتریس کوواریانس مشتق جزئی توسط گره محاسبه می شود Σz^“(تومن،تی)ثابت است و همچنین (نوشته شده به عنوان Σz^“،مندر ادامه) و می تواند از قبل محاسبه شود ( برای جزئیات بیشتر به پیوست A یا [ 14 ] مراجعه کنید).
4.1.3. برآورد خطای محدودیت گرادیان
روش تخمین حرکت شرح داده شده در بخش 4.2 مستلزم تخمینی از خطای مرتبط با تخمین خاصی از GC است. z^“(تومن،تی)، به صورت واریانس خطای اسکالر. به منظور استخراج چنین اندازه گیری برای GC، از رویکرد احتمالی [ 25 ] استفاده می شود که توزیع احتمال را برای اجزای حرکت از محدودیت گرادیان به دست می آورد. محدودیت گرادیان معادله ( 3 ) به چند دلیل یک ایده آل سازی است [ 25]: مشتقات مکانی و زمانی واقعی در دسترس نیست، اما برآورد آنها موجود است. علاوه بر این، محدودیت گرادیان محدودیتی بر جریان (اپتیکال) است و نه بر حرکت واقعی میدان. به عنوان مثال، هنگام استفاده از محدودیت های گرادیان برای تخمین حرکت یک میدان بارش، حرکت را می توان تنها در مکان هایی که مقداری بارش وجود دارد تعیین کرد. در مناطقی که بارندگی وجود ندارد، تخمین حرکت صفر خواهد بود، زیرا مشتقات مکانی و زمانی صفر هستند، اگرچه ممکن است همچنان حرکت در جو وجود داشته باشد. از آنجایی که محدودیتهای گرادیان جریان نوری معمولاً در فضا ادغام میشوند، یک همسایگی فضایی که شامل بارندگی و بدون بارندگی است، «حرکات نوری» متفاوتی را نشان میدهد و بنابراین، یک تخمین حرکت میانگین ارائه میکند (همچنین به بخش 1.2 از [. .]، جایی که به این مشکل «دیوار خالی» می گویند). بنابراین، [ 26 ] یک مدل احتمالی برای محدودیت گرادیان معرفی کرد (جزئیات بیشتر را می توان در پایان نامه دکترا [ 25 ] یافت) شامل سه منبع احتمالی خطا، که هر کدام با متغیرهای نویز تصادفی گاوس مشخص می شوند. در اینجا، مدل [ 25 ]) استفاده می شود، اما فرض بر این است که برآورد مشتقات جزئی در فضا منبع غالب خطا است و هیچ خطایی در مشتق زمانی برآورد شده وجود ندارد. علاوه بر این، خطای مربوط به تفاوت بین “جریان نوری” و حرکت واقعی با نادیده گرفتن GCها در فرآیند تخمین در نظر گرفته می شود، زمانی که حداقل یکی از شرایط زیر اعمال می شود:
-
مقادیر میدان صفر: زمانی که مقادیر فیلد مورد استفاده برای محاسبه مشتق صفر باشد و از این رو، همه مشتقات صفر باشند، GC اصلا تخمین زده نمی شود. معمولاً اندازهگیریهای میدانهای مکانی-زمانی صفر هستند، به این معنی که اکثر نمونهها صفر هستند. در چنین حالتی، هیچ حرکتی را نمی توان تخمین زد و انرژی گره را می توان ذخیره کرد.
-
مرز میدان گسترش همسایگی گره: زمانی که تنها یکی از نمونههای حسگر برای تخمین GC صفر باشد، GC به هیچ وجه تخمین زده نمیشود، زیرا همسایگی گره بر روی مرزهای میدان گسترش مییابد. در حالی که هنوز هم میتوان GC را با استفاده از نمونههای حسگر باقیمانده تخمین زد، این کار انجام نمیشود، زیرا ماتریسهای حداقل مربعات برای تخمین مشتقات جزئی از قبل محاسبه شدهاند ( برای جزئیات به [ 14 ] مراجعه کنید).
-
مقادیر میدان غیر صفر، اما برابر: وقتی میدان کاملاً مسطح است، مطابق با مشکل “دیوار خالی” که قبلا توضیح داده شد، GC اصلاً تخمین زده نمی شود. این حالت زمانی قابل تشخیص است که تمام نمونههای حسگر مجاور یک گام زمانی t بزرگتر از صفر، اما برابر باشند. سپس، مشتقات صفر هستند و GC به تخمین حرکت کمکی نمی کند.
برای استخراج یک اندازه گیری خطای محدودیت گرادیان زمانی که هیچ یک از موارد فوق اعمال نمی شود، از رویکرد [ 25 ] استفاده می شود: فرض می شود که مشتقات مکانی واقعی با مشتقات فضایی تخمین زده شده از طریق برخی از متغیرهای نویز تصادفی مرتبط هستند. nzایکسو nzY(دوباره، پارامتر مکان مکانی-زمانی تومن،تیبرای سهولت خوانایی از قلم افتاده است).
جایی که z^ایکس“و z^Y“مشتقات جزئی تخمین زده شده در جهت X و Y هستند،زایکس“و زY“مشتقات واقعی هستند و nzایکس“و nzY“متغیرهای نویز هستند. از آنجایی که هیچ خطایی برای برآورد مشتق زمانی فرض نمی شود، یک GC (معادله ( 3 )) را می توان به صورت زیر فرموله کرد:
از این، رابطه احتمالی بین برآورد مشتقات جزئی و حرکت واقعی که قرار است تخمین زده شود را می توان استخراج کرد [ 25 ]:
با فرض صفر میانگین صداهای مستقل گاوسی، عبارت سمت راست معادله ( 11 ) یک متغیر تصادفی میانگین صفر با واریانس است:
جایی که σzایکس“2و σzY“2واریانس های هستند nzایکس“و nzY“، به عبارت دیگر، و vایکسو vYحرکات میدانی هستند. استقلال آماری nzایکس“و nzY“نمی توان انتظار داشت که در واقعیت وجود داشته باشد، اما از آنجایی که هیچ اطلاعاتی در مورد وابستگی (یعنی کوواریانس) نمی توان ایجاد کرد، این یک ساده سازی ضروری است. رابطه معادله ( 12 ) منطقی است، زیرا یک محدودیت گرادیان را می توان به عنوان یک معادله رگرسیون بدون قطع، ضرایب درک کرد. vایکسو vY، متغیرهای مستقل –زایکس“و –زY“و متغیر وابسته زتی“(این نیز رسمی سازی فیلتر کالمن است که در بخش بعدی توضیح داده شده است). تاپل ها (z^ایکس“،z^Y“،z^تی“)برای کالیبراسیون ضرایب استفاده می شود. سپس مشخص می شود که هر چه ضرایب رگرسیون کوچکتر باشد vایکسو vY، نفوذ کوچکتر از σzایکس“2و σzY“2، به طور کامل برای یک صفحه رگرسیون مسطح ناپدید می شود، به عنوان مثال، vایکس=vY=0. شرایط σzایکس“2و σzY“2در رابطه ( 12 ) می توان از ماتریس کوواریانس بردار مشتقات جزئی (مدخل های مورب Σز^“معادله ( 9 )). شرایط vایکسو vYناشناخته هستند و باید از قبل تعریف شوند و بنابراین پارامتری از الگوریتم هستند. در این مورد، خطای فرضی یک محدودیت گرادیان ارائه شده توسط یک گره nمنثابت است و صرفاً توسط پیکربندی فضایی تعیین می شود. بنابراین، می توان آن را در مرحله اولیه سازی الگوریتم ( پیوست A ) از قبل محاسبه کرد و با σجیسیمن2در ادامه مطلب در صورت منفی بودن nzایکس“و nzY“، مشتقات فضایی تخمین زده شده از مشتقات فضایی واقعی دست کم گرفته شده است. سپس، تخمین های حرکت، سرعت واقعی حرکت را بیش از حد تخمین می زنند. این را می توان با یک مثال ساده توضیح داد: با یک مشتق مطلق زمانی ثابت و مشتقات فضایی مطلق کم، میدان باید فاصله بیشتری را در فضا جابجا کند تا معادله GC معتبر شود، یعنی مقادیر مطلق vایکسو vYباید بزرگتر باشد برعکس، مشتقات فضایی مطلق بزرگتر منجر به سرعت کمتر می شود.
4.2. انسجام زمانی: فیلتر کالمن برای تخمین حرکت
مسئله تخمین حرکت از مجموعه ای از GCها را می توان به عنوان یک مدل رگرسیون خطی چند متغیره و بدون وقفه با اجزای حرکت در هر دو جهت به عنوان پارامترها/ضرایب مدل، مشتقات جزئی فضایی به عنوان رگرسیون (یعنی متغیرهای مستقل) در نظر گرفت. و مشتق جزئی در زمان به عنوان متغیر پاسخ (یعنی وابسته) (معادله ( 13 )):
با این حال، مدل با مسائل رگرسیون چند متغیره کلاسیک متفاوت است، زیرا متغیر پاسخ بدون خطا فرض می شود، در حالی که رگرسیون ها در معرض خطا هستند (به بخش 4.1.3 مراجعه کنید ). بنابراین، روشهای برآورد برای حسابداری این خطاها در دادهها مورد نیاز است (به عنوان مثال، مدلهای رگرسیون خطا در متغیرها، مانند حداقل مجذورات کل). با این حال، بررسی چنین روشهای تخمینی را به کارهای آینده واگذار میکنیم و از حداقل مربعات معمولی استاندارد (OLS) برای حل مدل استفاده میکنیم. برای کالیبراسیون با GC های جمع آوری شده در مکان و زمان، تصمیم گیری لازم است که GC ها برای تخمین حرکت در یک گره خاص یکپارچه شوند. nمنو گام زمان t . در اینجا، فرض بر این است که در همسایگی گره تک هاپ، حرکت یکنواخت است. بنابراین، یک گره GC های ارائه شده توسط همسایگان مستقیم خود را یکپارچه می کند. برای ادغام GCها در زمان، یک روش تخمین حداقل مربعات بازگشتی در قالب یک فیلتر کالمن [ 13 ] استفاده می شود (همچنین به [ 27] مراجعه کنید.] برای کاربرد فیلتر کالمن برای مشکلات رگرسیون). فیلتر کالمن چندین مزیت نسبت به روشهای حداقل مربعات برای دادههای سری زمانی دارد، زیرا نیازی به ذخیرهسازی مقادیر زیادی از دادههای گذشته ندارد، هزینههای محاسباتی را هنگام بهروزرسانی ضرایب رگرسیون کاهش میدهد و به صورت رسمیسازی پیشبینی و بهروزرسانی ارائه میشود. به خوبی با مشکل مطابقت دارد فیلتر کالمن نیاز به تصمیم اولیه در مورد متغیرهای حالت دارد. ساده ترین شکل برای مسئله در دست، حالت کالمن با تنها دو جزء حرکت است که در [ 14 ] استفاده شده است. در این حالت، حرکت ثابت در نظر گرفته میشود و تغییر حرکت صرفاً با تنظیم واریانس خطای پیشبینی Q مدلسازی میشود. بزرگتر از صفر استفاده شده است . گنجاندن متغیرهای تغییر حرکت (یعنی اولین مشتقات حرکت با توجه به زمان) در حالت کالمن با فرض ثبات تغییر حرکت کمی واقعیتر است. ایالت کالمن vمن(ک)شامل مشتقات حرکت در گره i و گام زمانی k است:
جایی که vایکسو vYمولفه های بردار حرکت در جهات X و Y هستند . v˙ایکسو v˙Yمشتقات حرکت هستند، یعنی شتاب. ماتریس پیش بینی F به صورت زیر است:
جایی که Δتی=ک–(ک–1)یعنی تفاوت بین مراحل فیلتر. به منظور استفاده از معادله اندازهگیری کالمن برای بهروزرسانی حالت حرکت با یک نمونه محدودیت گرادیان جدید، محدودیت گرادیان معادله (3) به شکل رگرسیون خطی معادله (13) بازگردانده میشود (به [27] یا [ 28 ] مراجعه کنید . نظریه فیلتر کالمن برای مسائل رگرسیون خطی با داده های سری زمانی). سپس، مشتق زمانی زمن،تی“(ک)تابع خطی اجزای حرکت و مشتقات جزئی در فضا در نظر گرفته می شود. ماتریس اندازه گیری فیلتر کالمن وابسته به زمان و گره است و مشتقات جزئی فعلی را شامل می شود (معادله ( 16 )).
به این ترتیب، وضعیت حرکت یک گره منفرد nمنبا GC های جدید به روز می شود. از زمان اندازه گیری زمن،تی“(ک)اسکالر است، واریانس خطای اندازه گیری R اسکالر است، و بنابراین، حل معادلات به روز رسانی کالمن نیازی به وارونگی ماتریس [ 27 ] ندارد، که برای مقدار پردازش مورد نیاز سودمند است. مشخص کردن یک حالت پیشینی مورد نیاز است که فقط می تواند بر روی صفر تنظیم شود. عدم قطعیت پیشینی، P اولیه ، باید حاوی مقادیر زیادی در مورب باشد، که نشان دهنده اطمینان کم در حالت اولیه است. عدم قطعیت مرتبط با پیش بینی Qبه نرخ نمونه برداری زمانی، یعنی تفاوت زمانی بین مراحل فیلتر کالمن، و همچنین ثبات فرضی حرکت و تغییر حرکت میدان مکانی-زمانی بستگی دارد. بنابراین، دانش دامنه می تواند برای تنظیم واریانس های مورد نیاز استفاده شود. به عنوان مثال، هنگام نمونهبرداری از یک میدان جوی، مانند بارش با نرخ نمونهبرداری 1 دقیقه، میتوان انتظار داشت که تفاوت حرکت بین مراحل زمانی 1 دقیقهای مجاور در محدوده کیلومتر در ساعت بسیار پایین باشد. واریانس نویز اندازه گیری اسکالر R12 تابع مستقیم دقت GC است. علاوه بر این، این بستگی به فاصله فضایی بین گره برآورد کننده حرکت و گره برآورد کننده GC دارد. فرض این است: هر چه دو گره به هم نزدیکتر باشند، حرکت شبیهتر است. علاوه بر این، همانطور که در کار بر روی جریان نوری مبتنی بر تصویر، مانند [ ]، دقت GC به ویژگی های میدان در محلی که در آن ساخته شده است بستگی دارد . با این حال، در این کار، منبع اصلی خطا، خطای مشتق جزئی در نظر گرفته شده است و بنابراین، واریانس نویز اندازه گیری R با استفاده از معادله (12 ) با ضریب واریانس از پیش محاسبه شده. مدل فیلتر کالمن ارائه شده به اندازه کافی عمومی برای ثبت رفتارهای حرکت میدانی که رخ میدهند در نظر گرفته میشود و با تنظیم متغیرهای تغییر حرکت اولیه و واریانس خطای تغییر حرکت اولیه روی صفر، مدل حرکت ثابت [ 14 ] را در بر میگیرد.
5. ارزیابی تجربی
در این بخش، عملکرد الگوریتم به صورت تجربی برای یک میدان شبیه سازی شده ( بخش 5.4 ) و یک میدان بارش مشتق شده از رادار هواشناسی ( بخش 5.5 ) ارزیابی می شود.
5.1. منطقه مطالعه، شبکه حسگر و استراتژی استقرار
یک منطقه 10 کیلومتر × 10 کیلومتر در مرکز شهر هانوفر به عنوان منطقه مورد مطالعه برای ارزیابی الگوریتم تخمین حرکت پیشنهادی انتخاب شده است ( شکل 2 ).
این منطقه مطالعه خاص به دلیل در دسترس بودن داده های رادار آب و هوا انتخاب شده است. رادار هواشناسی منطقه بسیار بزرگتری را پوشش می دهد، اما فناوری فعلی GSN معمولاً فواصل ارتباطی را به محدوده ده ها تا صدها متر محدود می کند تا تقاضای انرژی را کاهش دهد. بنابراین، به منظور در نظر گرفتن محدوده های ارتباطی کم، یک زیر منطقه کوچک شهری از منطقه تحت پوشش رادار انتخاب می شود. هنگامی که از خودروها به عنوان GSN استفاده می شود، می توان انتظار داشت که دقت برای مناطق با تراکم جاده کمتر، به عنوان مثال، مناطق روستایی کاهش یابد.
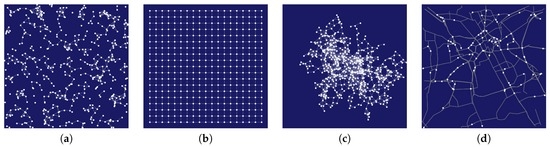
یک GSN با یک مدل ارتباطی UDG شبیه سازی شده و استراتژی های مختلف استقرار آزمایش می شوند ( شکل 3 ). ابتدا، گره ها در منطقه مورد مطالعه به صورت کاملاً تصادفی توزیع می شوند ( شکل 3 a)، که معمولاً منجر به یک نمودار قطع ارتباط می شود که در آن تنها زیر مجموعه ای از گره ها قادر به تخمین حرکت هستند. دوم، یک استقرار منظم مبتنی بر شبکه آزمایش می شود ( شکل 3 ب). سپس، به عنوان دو مورد واقعی تر، یک استقرار مبتنی بر انتشار بر اساس یک گره منبع در مرکز منطقه مورد مطالعه شبیه سازی می شود، به عنوان مثال یک ایستگاه پایه یا گره که نتایج را جمع آوری می کند (به نام سینک [11])، که در آن چگالی برابر است . توسط دو پارامتر، حداکثر و حداقل فاصله تا گره های همسایه کنترل می شود ( شکل 3ج). علاوه بر این، خودروها در یک شبکه جادهای که از نقشه خیابان باز (OSM) مشتق شده است، تولید میشوند. ماشین ها بر اساس یک مدل پیاده روی تصادفی در شبکه جاده ها با سرعت مشخصی حرکت می کنند که در طول آزمایش ها متفاوت است.
در طول آزمایشها، دو چگالی گره و محدوده ارتباطی مختلف شبیهسازی شدهاند: (1) استقرار ارتباط با چگالی کم و مسافت زیاد با n=25گره ها و یک محدوده ارتباطی از r=2000متر و (2) استقرار ارتباطی با چگالی بالا و فاصله کوتاه با n=400و r=500متر
5.2. اقدامات خطا
در ادامه [ 15 ]، خطای الگوریتمهای تخمین حرکت با استفاده از اختلاف زاویهای بین حرکت واقعی V و حرکت تخمین زده شده کمیسازی میشود.V^:
که در آن ‖‖ هنجار برداری است، · محصول نقطه ای است، V(تومن،تی)=(vایکس،vY)تیحرکت واقعی در محل گره مکانی-زمانی است تومن،تیو V^(تومن،تی)=(v^ایکس،v^Y)تیحرکت تخمینی است، یعنی حالت فیلتر کالمن گره i در زمان t (به استثنای متغیرهای شتاب). علاوه بر این، تفاوت در سرعت حرکت (که در زیر “تغییر سرعت” نامیده می شود) محاسبه می شود:
در مورد یک میدان شبیه سازی شده، حرکت میدان واقعی شناخته می شود، زیرا پارامتری از شبیه سازی است. برای میدان های رادار آب و هوا، حرکت تخمین زده شده توسط الگوریتم [ 3 ] به عنوان حرکت واقعی استفاده می شود که از تصاویر رادار آب و هوا تخمین زده می شود.
5.3. تنظیم پارامترهای فیلتر
فیلتر کالمن به دو پارامتر نیاز دارد: نویز پیش بینی و نویز اندازه گیری. مانند هر مشکل فیلتر کالمن، اگر نویز اندازه گیری در مقایسه با نویز پیش بینی زیاد باشد، فیلتر فقط به آرامی اندازه گیری ها را دنبال می کند و بیشتر به پیش بینی ها اعتماد می کند. در اینجا، اندازه گیری های فردی (محدودیت های گرادیان) نسبتاً نادرست در نظر گرفته می شوند. بنابراین، نویز اندازهگیری کالمن بهطور قابلتوجهی بزرگتر از نویز پیشبینی است، بهویژه زمانی که چندین بهروزرسانی فیلتر در هر مرحله زمانی رخ میدهد و فرض میشود که حرکت در دورههای نمونهگیری نسبتاً ثابت است. بنابراین و از آنجایی که در ارزیابیهای زیر فقط حرکت ثابت شبیهسازی میشود، نویز پیشبینی Q در ارزیابیهای زیر روی ماتریس صفر تنظیم میشود. س=04،4. اگر در غیر این صورت مشخص نشده باشد، نویز اندازه گیری اسکالر فیلتر کالمن با معادله ( 12 ) محاسبه می شود. ضریب واریانس مورد نیاز با اجرای پیش از فیلتر و مشاهده مقدار محاسبه شده توسط معادله ( 10 ) برای هر گره برآورد می شود. سپس ضریب واریانس متوسط در شبیه سازی ها استفاده می شود. پارامتر سرعت حرکت مورد نیاز در معادله ( 12 ) روی حداکثر حرکت ممکن تنظیم شده است، پارامتری که فرض میشود از دانش حوزه مشتق شده است، به عنوان مثال، دانش در مورد حداکثر سرعت ممکن باد یا جریانهای اقیانوسی. حالت اولیه فیلتر روی بردار صفر تنظیم شده است. کوواریانس حالت اولیه P روی مقادیر بزرگ تنظیم می شود که نشان دهنده عدم قطعیت در حالت اولیه است.
5.4. نتایج: میدان شبیه سازی شده
شبیه سازی میدان های جوی یا اقیانوس شناسی واقعی یک کار پیچیده است. بنابراین، رویکردی که در اینجا اتخاذ میشود، شبیهسازی یک میدان متحرک مکانی-زمانی نسبتاً سادهسازی شده است تا ویژگیهای اساسی الگوریتم پیشنهادی، مانند رفتار تحت سرعتهای مختلف حرکت را نشان دهد. میدان شبیه سازی شده یک مدل مخلوط گاوسی است که بر روی مربعی هشت برابر اندازه منطقه مورد مطالعه اولیه شبیه سازی شده است (معادله ( 19 )).
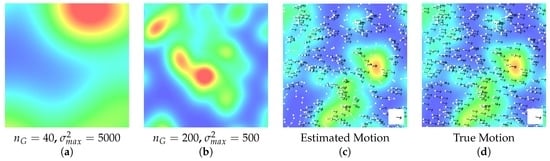
جایی که nجیتعداد گاوسیان است، μمن،ایکسمختصات x است، μمن،yمختصات y مرکز گاوسی i است که به طور تصادفی از فضای مختصات منطقه مورد مطالعه ترسیم شده است. σمن2واریانس است که به طور تصادفی از بازه استخراج می شود [0،σمترآایکس2]برای هر گاوسی در واقع، میتوان انتظار داشت که مزارع بخشهای زیادی از مقادیر میدان صفر را نشان دهند، به عنوان مثال، دورههای بدون بارندگی در بین ابرهای بارانی. به منظور انعکاس این موضوع در شبیهسازیها، حداقل مقدار میدان ممکن در نظر گرفته میشود و اگر مقادیر شبیهسازی شده زیر این آستانه قرار گیرند، فیلد روی صفر تنظیم میشود. با توجه به فرض خطی بودن جریان نوری معادله ( 2) و روش تخمین مشتق، تخمین حرکت زمانی به خوبی کار میکند که میدان در مکانهایی که محدودیتهای گرادیان ساخته شدهاند تقریباً خطی باشد و دقت قابل دسترسی تا حد زیادی به درجه خطی بودن میدان بستگی دارد. بنابراین، دو میدان مختلف شبیهسازی شدهاند که در درجه خطی بودنشان متفاوت است: میدان خطیتر با استفاده از تعداد کم گاوسی با حداکثر واریانس زیاد شبیهسازی میشود. σمترآایکس2. یک میدان متنوع تر و غیر همگن با استفاده از تعداد زیادی گاوسی با حداکثر واریانس کوچک شبیه سازی شده است. σمترآایکس2. نمونه هایی از فیلدهای حاصل در شکل 4 a,b نمایش داده شده است.
رفتارهای حرکتی مختلف میدان را می توان با حرکت دادن مختصات مرکزی گاوسی ها شبیه سازی کرد. μمن،ایکسو μمن،y) از طریق منطقه مورد مطالعه. برای اینکه بتوان تعداد نامحدودی از مراحل زمانی را شبیهسازی کرد، یک گاوسی که منطقه را به سمت غرب ترک میکند دوباره در سمت راست ظاهر میشود و غیره. رفتار حرکتی در فضا (یکنواختی). همانطور که رویکرد حرکت انتقالی محلی را در همسایگی گره فرض میکند، دقت تخمین حرکت قطعاً به درجه یکنواختی فضایی حرکت بستگی دارد. در اینجا، فرض بر این است که حرکت در سراسر محله گره نسبتاً همگن است، به عنوان مثال حرکت میدان باران در یک محله 2000 متری، و هیچ ارزیابی در مورد عدم یکنواختی فضایی ارائه نشده است. دقت تخمین حرکت قطعاً به انسجام زمانی حرکت نیز بستگی دارد. باز هم، اگرچه مدل ها امکان تغییر حرکت را می دهند، فرض بر این است که حرکت در طول دوره مورد نظر نسبتاً ثابت است. برای بررسی عملکرد الگوریتم، 100 مرحله زمانی یک میدان متحرک دائمی و یکنواخت شبیه سازی شده و خطاها برای هر مرحله زمانی جمع می شوند. تجسم نمایش داده شده درشکل 4 یک عکس فوری از شبیه سازی ها را نشان می دهد.
5.4.1. تأثیر خطی بودن میدان، سرعت میدان و تراکم گره
در آزمایش اول، تأثیر میدان، سرعت حرکت و چگالی گره بررسی میشود. در شکل 5 ، خطای تخمین حرکت به عنوان تابعی از زمان برای دو میدان مکانی-زمانی مختلف و دو سرعت حرکت مختلف نمایش داده شده است: حرکت سریع ( vایکس=–1000m/min و vy=1000m/min) و حرکت آهسته ( vایکس=–100m/min و vy=100m/min)، و همچنین تراکم شبکه دو گره در یک استقرار تصادفی گره و محدوده های ارتباطی مختلف UDG r .
با گذشت زمان، خطای تخمین حرکت برای زاویه و سرعت کاهش می یابد. هرچه میدان همگن تر (و بنابراین خطی تر) باشد، خطای زاویه ای کمتر است. علاوه بر این، سرعت حرکت مهم است: هرچه سرعت بزرگتر باشد، فرض خطی بودن معادله ( 2 ) کمتر معتبر است. هر دو تأثیر، خطی بودن میدان و سرعت حرکت، به شدت مرتبط هستند: هر چه میدان همگن تر و خطی تر باشد، سرعت حرکت بر دقت تخمین تأثیر کمتری دارد. با یک غیر خطی قوی در مقادیر میدان و حرکت زیاد، خطاهای مربوط به زاویه و سرعت زیاد می شوند. دست کم گرفتن سرعت برای حرکات بزرگ به دلیل افزایش بی اعتباری بسط تیلور معادله است ( 2) برای بردارهای حرکتی بزرگ. سپس، به نظر می رسد مشتقات فضایی تخمین زده شده تغییر در مقادیر میدان را برای طول جابجایی بیش از حد برآورد می کنند (همچنین به آخرین پاراگراف بخش 4.1.3 برای توضیح بیشتر در مورد این موضوع مراجعه کنید). علاوه بر این، هرچه استقرار پراکنده تر باشد، خطاها بزرگتر می شود. بنابراین، استقرار متراکم با گرههایی که از میدان نمونهبرداری میکنند با نرخ نمونهبرداری بالا برای تخمین حرکت سودمند است.
5.4.2. تأثیر استراتژی استقرار
برای ارزیابی تأثیر استقرار گره بر نتایج تخمین حرکت، یک میدان همگن شبیهسازی میشود که به آرامی در منطقه مورد مطالعه و یک استقرار گره متراکم حرکت میکند. عملکرد استراتژیهای استقرار مختلف که قبلاً معرفی شدهاند آزمایش شده است ( شکل 6 ).
نتایج نشان میدهد که این رویکرد نسبت به استقرار گرههای ثابت نسبتاً آگنوستیک است. اگرچه، همانطور که انتظار می رود، استقرار مبتنی بر شبکه اندکی سودمند است، تفاوت قابل توجهی در نظر گرفته نمی شود، حداقل برای تعداد بالای گره ها. تخمین حرکت با VANET منجر به خطاهای قابل توجهی بزرگتر می شود که احتمالاً به دلیل افزایش بی اعتباری برآورد مشتق موقت است. با کمال تعجب، خودروهای ساکن خطاهای بزرگی نیز ارائه میکنند، اگرچه شبیه به استقرار تصادفی گرههای ثابت هستند. این را می توان با پیکربندی فضایی و نمونه برداری در شبکه جاده توضیح داد: به دلیل گستره ارتباطی r=500متر، اتومبیل ها معمولاً فقط هنگام رانندگی در همان جاده ارتباط برقرار می کنند. بنابراین، نمونه ها برای تخمین مشتق اغلب به صورت خطی در امتداد جاده تراز می شوند، که برای تخمین حرکت مضر است. این مشکلی است که احتمال وقوع آن در واقعیت نیز بسیار زیاد است.
5.4.3. تأثیر نویز اندازه گیری کالمن
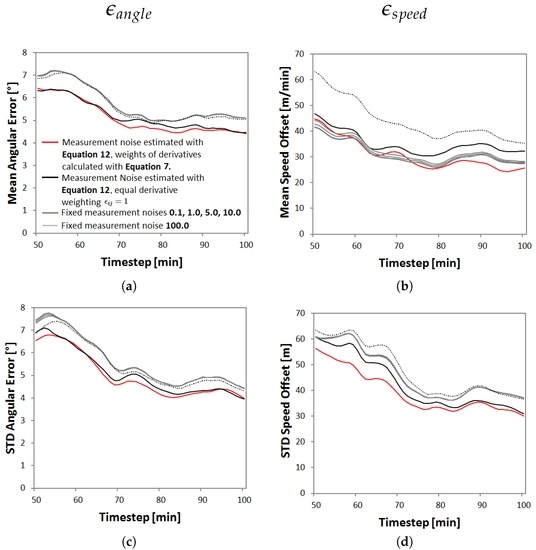
برای بررسی پارامتر نویز اندازه گیری کالمن، یک GSN از n=25گره هایی با فاصله ارتباطی UDG از r=2000m شبیه سازی شده است. گره ها بر اساس یک استقرار مبتنی بر انتشار با حداقل فاصله گره مجاز 1000 متر و حداکثر فاصله گره برابر با محدوده ارتباطی UDG توزیع می شوند. r=2000متر رفتار حرکت میدان به طور تصادفی از بازه کوچک انتخاب می شود vایکس∈[–500متر/تی،500متر/تی]و vY∈[–500متر/تی،500متر/تی]. نویزهای مختلف اندازه گیری کالمن ثابت، با وزن مساوی مشتقات جهت (به عنوان مثال، ϵمنj=1در معادله ( 7 ) برای همه جفت گره ها). علاوه بر این، نویز اندازه گیری کالمن با روش توصیف شده در بخش 4.1.3 مورد آزمایش قرار می گیرد. به منظور کمی کردن شرایط معادله ( 12 )، حداکثر حرکات میدان ممکن است vایکس=1000و vY=1000فرض می شوند. همانطور که قبلاً توضیح داده شد، ضریب واریانس مورد نیاز با پیش اجرای شبیه سازی ها و محاسبه ضریب واریانس متوسط با استفاده از رابطه ( 10 ) برآورد می شود. نتایج ارائه شده در شکل 7 میانگین 10 اجرای شبیه سازی با میدان مکانی-زمانی متفاوت، حرکت متفاوت و شبکه متفاوت در هر بار است.
به نظر می رسد استخراج خطاهای محدودیت گرادیان از پیکربندی فضایی برای تخمین حرکت سودمند باشد. علاوه بر این، فرمول ارائه شده برای استخراج خطای محدودیت گرادیان (معادله ( 12 )) روشی مستقیم برای محاسبه پارامتر نویز اندازهگیری کالمن مورد نیاز ارائه میدهد. بدون آن، مشخصات نویز اندازه گیری باید بر ملاحظات نسبتاً دلخواه تکیه کند. مشاهده می شود که دقت تخمین نسبت به نویز اندازه گیری کالمن ثابت نسبتاً آگنوستیک است، به جز نویزهای بسیار بزرگ. به نظر می رسد وزن دهی مشتقات جهت دار مزیت کمی نسبت به وزن دهی یکنواخت دارد. به دلیل دست کم گرفتن کلی مشتقات، سرعت به طور متوسط بیش از حد تخمین زده می شود (همچنین به بخش 4.1.3 مراجعه کنید.برای توضیح بیشتر در مورد این موضوع).
5.5. نتایج: میدان رادار
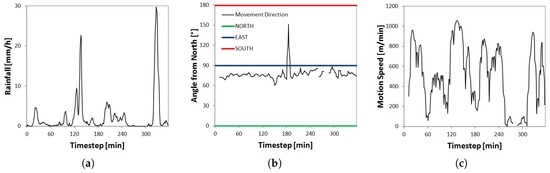
در آزمایش دوم، الگوریتم بر روی یک میدان بارش به دست آمده از رادار هواشناسی هانوفر ارزیابی می شود. شش ساعت از یک دوره بارندگی نسبتاً شدید (19 ژوئیه 2012، 4 صبح تا 10 صبح) انتخاب شده است. دادههای خام راداری (یعنی بازتابپذیریها) با استفاده از روششناسی شرحدادهشده در [ 29 ] پیش پردازش شدند، که منجر به مقادیر بارندگی در واحد میلیمتر در ساعت در یک شبکه معمولی با وضوح 1 شد. کیلومتر2×1 کیلومتر2( 10×10پیکسل در منطقه مورد مطالعه) با نرخ نمونه برداری 5 دقیقه. دادههای رادار با استفاده از یک الگوریتم جریان نوری به عکسهای فوری ۱ دقیقهای تبدیل میشوند (اجرای OpenCV الگوریتم ارائه شده توسط [ 3 ]). علاوه بر این، شبکه های به دست آمده توسط a صاف می شوند 3×3فیلتر میانگین حسابی به عنوان حرکت حقیقت زمین، میدان جریان حاصل از الگوریتم جریان نوری مبتنی بر تصویر استفاده می شود که بر روی کل تصویر رادار اجرا می شود. سپس یک بردار حرکت متوسط در هر مرحله زمانی با میانگین گیری بردارها در تمام 10 × 10 پیکسل منطقه مورد مطالعه در هر مرحله زمانی 1 دقیقه ای به دست می آید. مشخصات رویداد و اطلاعات حرکت مشتق شده در شکل 8 نمایش داده شده است .
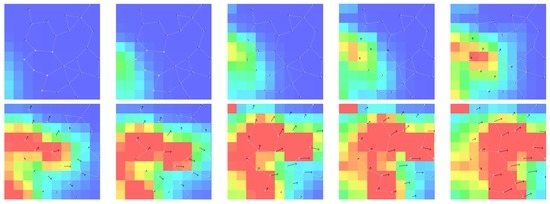
شکل 8 الف نشان می دهد که تعدادی ابر بارانی با دو دوره بارندگی بسیار شدید در مدت شش ساعت از منطقه مورد مطالعه عبور می کنند. میدان با یک حرکت نسبتاً ثابت از غرب به (کمی شمال) شرق حرکت می کند (تغییر جهت ناگهانی در اواسط دوره رخ می دهد که به طور بالقوه به دلیل درهم ریختگی رادار است). سرعت حرکت در حدود 1000 متر در دقیقه است، اما برای دورههای کم بارش کاهش مییابد، که مصنوع الگوریتم جریان نوری است. در شکل 9 ، سری زمانی عکس های فوری رادار 1 دقیقه ای و بردارهای حرکت تخمین زده شده با الگوریتم پیشنهادی نمایش داده شده است.
قبل از رسیدن اولین ابر به منطقه مورد مطالعه، هیچ تخمین حرکتی امکان پذیر نیست. با گذشت زمان، بردارهای حرکت گره ها به جهت حرکت ابر شرق-شمال-شرق نزدیک می شوند. برای ارزیابی عملکرد الگوریتم، دو چگالی شبکه در استقرار مبتنی بر انتشار شبیهسازی شدهاند. نویز اندازه گیری فیلتر کالمن با استفاده از روش پیشنهادی محاسبه می شود. نویز پیشبینی کالمن به مقادیر کوچک کمی بزرگتر از صفر تنظیم میشود تا به فیلتر اجازه دهد تا با دادههای تازه وارد تنظیم شود و به یک راهحل پایدار که حتی در صورت تغییر حرکت تغییر نمیکند همگرا نشود.
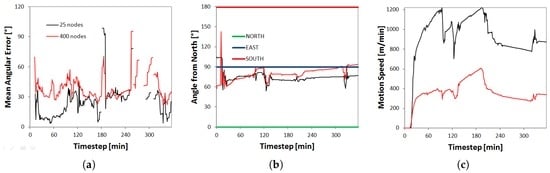
شکل 10 a سری زمانی میانگین خطای زاویه ای (OF مبتنی بر تصویر در مقابل رویکرد پیشنهادی) را برای دو چگالی شبکه مختلف نشان می دهد. با کمال تعجب، استقرار پراکنده نتایج بهتری ارائه می دهد. دلیل اصلی این امر به احتمال زیاد میدان رادار است: حداکثر فاصله گره 500 متری نیمی از اندازه پیکسل رادار است که خطای واقعی را نشان می دهد. استقرار پراکنده نتایج خوبی را نشان می دهد. خطای زاویه ای در اکثر موارد زیر 30 است. جهت حرکت متوسط نمایش داده شده در شکل 8 ب به خوبی با نتایج الگوریتم جریان نوری مبتنی بر تصویر در شکل 8 ب مطابقت دارد. سرعت حرکت برای شبکه پراکنده در شکل 8 c را می توان دقیق تر از سرعت حرکت فرضی “واقعیت زمین” در شکل 8 در نظر گرفت.ج این تنظیم را می توان مشابه میدان ناهمگن با تنظیم شبیه سازی حرکت سریع شکل 5 در نظر گرفت . با استقرار متراکم گره ها و محدوده ارتباطی کوچک، سرعت حرکت هم برای میدان شبیه سازی شده و هم برای میدان راداری دست کم گرفته می شود. بنابراین، یا افزایش نرخ نمونه برداری برای شبکه متراکم یا کاهش فاصله گره توصیه می شود.
6. بحث و نتیجه گیری
مقاله حاضر الگوریتمی را برای تخمین حرکت میدانهای متحرک مکانی-زمانی توسط گرههای یک GSN معرفی میکند. یک الگوریتم جریان نوری شناخته شده به عنوان پایه مورد استفاده قرار گرفت و با ویژگی های GSN تنظیم شده است، به عنوان مثال، توزیع نامنظم گره ها و محدودیت های منابع قوی (تحلیلی از پیچیدگی محاسباتی و ارتباطی الگوریتم ارائه شده در [ 14 ]). الگوریتم پیشنهادی به شکل غیرمتمرکز رسمی شده است و شبه کد گره در قالب یک پروتکل الگوریتم غیرمتمرکز ارائه شده است ( پیوست A ). به دلیل ماهیت دو بخشی آن ( بخش 4، همچنین می توان آن را طوری تنظیم کرد که تمام اطلاعات به یک گره مرکزی که مسئول تخمین حرکت است هدایت شود. عملکرد الگوریتم با استفاده از میدان های شبیه سازی شده و همچنین میدان های بارش به دست آمده از رادار هواشناسی ارزیابی شده است. برای دو معیار خطای زاویه حرکت و سرعت حرکت، شبیهسازیهای گسترده نشان دادهاند که تخمین حرکت میدان غیرمتمرکز توسط گرههای توزیع نامنظم یک GSN در واقع ممکن است. مطمئناً، عملکرد الگوریتم زمانی محدود میشود که: (الف) میدان ساختار یا تغییرات شدت کافی را نشان نمیدهد (یعنی مشکل “دیوار خالی” که قبلاً توضیح داده شد). (ب) تغییر شدت یا حرکت خیلی سریع را نشان می دهد که نمی توان آن را به صورت خطی در طول جابجایی با معادله ( 2) تخمین زد.) (ج) ساختار خود را به سرعت در بین دورههای نمونهبرداری متوالی تغییر میدهد، بهعنوان مثال، انحراف بیش از حد از محدودیت اصلی پایستگی شدت معادله OF ( 1 ). یا (د) اندازه گیری های حسگر به دلیل نویز زیاد خراب شده است.
یافته های اصلی ارزیابی های الگوریتم را می توان به صورت زیر خلاصه کرد:
-
ویژگی های میدان و چگالی استقرار: شبیه سازی ها نشان داده اند که درجه خطی بودن میدان در ارتباط با سرعت حرکت یک عامل مهم است و با افزایش غیرخطی بودن و سرعت حرکت، دقت قابل دستیابی کاهش می یابد (شکل 5 ) . این واقعیتی است که از کار بر روی جریان نوری مبتنی بر تصویر شناخته شده است، اما پیامدهای مستقیمی در یک تنظیمات GSN دارد که در آن میزان استقرار و نمونهبرداری گرهها تا حدی قابل کنترل است. از آنجایی که حرکت کوچک در فضا به دلیل بسط تیلور معادله سودمند است ( 2) مهم است که از میدان با نرخ نمونه برداری بالا نمونه برداری شود. علاوه بر این، همچنین مهم است که گره ها نسبتاً متراکم و نزدیک به یکدیگر مستقر شوند (که در مورد مصرف برق نیز مفید است) زیرا دقت تخمین مشتقات جزئی با افزایش فاصله گره کاهش می یابد.
-
استقرار و ایستایی گره ها: وقتی تعداد گره ها و فاصله ارتباطی ثابت نگه داشته می شوند، استراتژی استقرار گره های ثابت تأثیر زیادی بر نتایج تخمین حرکت ندارد ( شکل 6 ). با این حال، با کاهش تراکم گره، عملکرد یک استقرار تصادفی قطعا کاهش می یابد، زیرا گره های قطع شده وجود خواهد داشت. علاوه بر این، الگوریتم برای گره های ثابت توسعه داده شده است. با این وجود، میتوان آن را در یک محیط غیر ثابت، به عنوان مثال، برای خودروها نیز اعمال کرد. با این حال، سپس دقت تخمین حرکت کاهش مییابد ( شکل 6 ) به دلیل افزایش خطا در برآورد مشتق زمانی و همترازی خطی خودروها در امتداد جادهها.
کار آینده شامل تجزیه و تحلیل خطای حالت حرکت فیلتر کالمن است که در عمل یک معیار مهم است. علاوه بر این، مدلهای خطا در متغیرها میتوانند برای جایگزینی فیلتر کالمن برای تخمین حرکت بررسی شوند، به عنوان مثال، روش حداقل مجذورات مجموع که خطاها در برآورد مشتقات فضایی را مستقیماً محاسبه میکند. علاوه بر این، شبیهسازی برای دورههای زمانی طولانیتر، مانند روزها یا هفتهها، برای ارزیابی رفتار الگوریتم در شرایط متغیر حرکت ضروری است. شبیهسازیهای VANET نشان دادهاند که برای دستیابی به نتایج رضایتبخش و قابل اعتماد در یک محیط غیر ثابت، کار بیشتری روی الگوریتم مورد نیاز است. مثلا، ادغام تخمین مشتق موقت در تعدیل حداقل مربعات برای تخمین مشتقات جزئی یا شامل یک عبارت خطا برای برآورد مشتق زمانی. در نهایت، هدف نهایی جایگزینی شبکه شبیه سازی شده با استقرار واقعی یک GSN و اندازه گیری های واقعی یک میدان جوی یا اقیانوس شناسی متحرک است.






بدون نظر