1. معرفی
درک رفتار سفر هسته اصلی برنامه ریزی حمل و نقل و خدمات مختلف تحرک آگاه از زمینه است. این مقاله بر روی تشخیص حالتهای سفر در تحرک شهری در زمان واقعی متمرکز است، جایی که زمینه به فعالیتهای مبتنی بر تحرک شهری مربوط میشود [ 1 ، 2 ]. به طور سنتی، اطلاعات رفتار سفر با نظرسنجی های کاغذی یا تلفنی از حافظه جمع آوری می شود. از آنجایی که فاصله زمانی بین سفر واقعی و زمان گزارش وجود دارد، چنین اطلاعاتی در معرض گزارش نادرست یا گزارشدهی ناقص هستند [ 3 ]. سایر روشهای مبتنی بر حسگر، مانند شمارش ترافیک [ 4 ] یا استفاده از کارت هوشمند، [ 5] منزوی، ناقص و غیرقطعی هستند. با این حال، با ظهور حسگرهای موقعیتیابی و واحدهای اندازهگیری اینرسی (IMU) روی گوشیهای هوشمند، ثبت فعالیتهای مبتنی بر تحرک کاربر تلفن هوشمند (مانند حالتهای حملونقل) با استفاده از آن حسگرهای موبایل در حال حاضر در حال تحقیق است [6 ، 7 ] . اطلاعات حالت حمل و نقل یک جزء مهم برآورد تقاضای سفر و تحلیل رفتار حرکتی در سطح فردی و جمعی است [ 8]]. علاوه بر این، تشخیص حالتهای حملونقل در زمان واقعی میتواند خدمات مختلفی را فعال کند، مانند اعلانهای تلفن همراه مخصوص حالت و پاسخدهی خودکار آگاه به زمینه. به عنوان مثال، هنگام رانندگی، می توان به طور خودکار پاسخ خودکار را در هنگام دریافت تماس فعال کرد تا از هرگونه حواس پرتی در جاده جلوگیری شود. تشخیص حالت تقریباً واقعی همچنین میتواند در شرایط اضطراری، تخمین حمایت در زمان واقعی در طول یک مسیر معین و اجرای سیاست موقت کمک کند.
یک مسیر خام، همانطور که توسط GPS ثبت شده است، تنها ویژگی هندسی حرکت را نشان می دهد و نمی تواند اطلاعات رفتاری اساسی را آشکار کند. از این رو، یک شکاف معنایی بین یک مسیر خام و رفتار حرکتی یک فرد وجود دارد. تحقیقات در پایگاه داده های شی متحرک و تجزیه و تحلیل مسیر شروع به استخراج اطلاعات مختلف با غنی سازی یک مسیر خام توسط دانش دامنه و اطلاعات زیرساخت و در نتیجه پر کردن شکاف به اندازه کافی کرد [ 9 ، 10 ].
اکثر تحقیقات تشخیص حالت حمل و نقل در مورد استنتاج آفلاین بر اساس مسیرهای تکمیل شده است. در مقابل، تشخیص حالت حمل و نقل در زمان واقعی یک مفهوم نسبتاً جدید است. تشخیص حالت انتقال، که یک مشکل طبقهبندی است، تاکنون توسط شبکههای عصبی مصنوعی (ANN)، ماشینهای بردار پشتیبان (SVM)، درختهای تصمیمگیری (DT) و چندین تکنیک یادگیری ماشین دیگر مورد توجه قرار گرفته است [11 ، 12 ، 13 ، 14 ، 15 . ، 16 ، 17 ]، و کمتر توسط مدل های دانش محور [ 18 ، 19 ].
با این حال، توانایی پیشبینی و در نتیجه عملکرد روشهای یادگیری ماشین سنتی در درجه اول به بردارهای ویژگی (با نگاشت ورودی-خروجی) مورد استفاده در مرحله آموزش بستگی دارد. در یک مسئله طبقه بندی، یک رویکرد یادگیری ماشین به طور کلی یک کلاس معین را برای یک بردار ویژگی تست ورودی بدون مفهوم عدم قطعیت یا اطمینان در پیش بینی آن پیش بینی می کند، و بنابراین، نمی تواند پیش بینی های جایگزین ارائه دهد. همچنین مواردی وجود دارد که کمبود داده های آموزشی کافی یا جهان ناقصی از گفتمان وجود دارد.
ثبت عدم قطعیت در تشخیص حالت نیز مهم است، زیرا مشاهدات سینماتیکی (پروفایل سرعت، رفتار مجاورت) ممکن است اغلب مبهم و نامشخص باشند (با توجه به یک مسیر ریز و متراکم GPS)، با احتمال کلاسهای مختلف با درجههای مختلف حقیقت. (قطعیت)، که یک تکنیک یادگیری ماشینی نمی تواند به آن رسیدگی کند. چنین عدم قطعیتی را می توان از طریق یک رویکرد سیستم خبره مبتنی بر دانش مدل کرد. در این مقاله، عدم قطعیت را از طریق یک مدل استدلال متخصص ترکیبی مدل میکنیم. استدلال مبتنی بر دانش دانش تخصصی را در بر می گیرد (و بنابراین، مدل انعطاف پذیر است و تعامل با تعدادی از متخصصان حوزه را فراهم می کند) از نظر قوانین ساده IF-THEN. قوانین را می توان تمدید یا کاهش داد. هر قانون همچنین می تواند هر تعداد از اطلاعات را از طریق مختلف ترکیب کندعملگرهای t -norm، و بنابراین، توسعه یک مدل رفتاری عمومی برای یک حوزه مشکل آسان است. استدلال متخصص انعطافپذیر، گویاتر و شهودی است، در حالی که یک مدل یادگیری ماشینی قدرت بیان محدودی را ارائه میدهد و باید هر بار با یک نمونه آموزشی جدید آموزش داده شود، زمانی که نیاز به ارتقای مدل وجود دارد. از آنجایی که یک مدل دانش محور (سیستم خبره) می تواند طرح استدلال خود را توضیح دهد، بنابراین مدل می تواند هر گونه ناهنجاری را در الگوی حرکت کاربر یا رفتار رانندگی وی بر اساس مجموعه قوانینی که برای مجموعه مشخصی از ویژگی های ورودی اجرا می شود منعکس کند. ، که توسط یک مدل یادگیری ماشینی خیلی برجسته نیست.
سیستم های خبره فازی مدل های سیستم خبره قدرتمندی هستند زیرا می توانند عدم قطعیت و ابهام را در قالبی قابل درک برای انسان مدیریت کنند. موفقیت یک سیستم خبره فازی در انتخاب مناسب توابع عضویت و پارامترهای آن است که عموماً به صورت دستی انجام می شود. بنابراین، مدلهای مبتنی بر منطق فازی ظرفیت محدودی را تحت شرایط مختلف فراهم میکنند، به ویژه زمانی که تعداد زیادی متغیر فازی وجود دارد [ 20]]. برای تفسیر مسیر، مدلهای فازی ممکن است کیفیت سازگاری با مجموعه قوانین داده شده خود همراه با تابع(های) عضویت در یک سفر معین نداشته باشند، به دلیل چند مسیر GPS و از دست دادن سیگنال، به ویژه در بخشهای کوتاهتر در زمینه زمان تقریباً واقعی. تشخیص حالت بنابراین، یک مدل استنتاج فازی به یک اتوماسیون نیاز دارد تا پارامترهای تابع عضویت خود را به طور خودکار با یادگیری از یک نگاشت ورودی-خروجی داده شده انتخاب کند. این امر با ادغام یادگیری ماشین با یک سیستم فازی انجام می شود: فقط یک سیستم عصبی-فازی قادر است یک سیستم خبره فازی را به طور خودکار با ارائه تغییرات توسط متخصصان در مراحل بعدی بدون داشتن داده های آموزشی مناسب ایجاد کند.
بنابراین، این مقاله یک چارچوب چند لایه ترکیبی عصبی فازی یکپارچه برای تشخیص حالت حمل و نقل به نفع زیرساخت حملونقل عمومی پیشنهاد میکند. این چارچوب یک شبکه عصبی مصنوعی (ANN) را با یک منطق فازی نوع Sugeno ترکیب میکند (به بخش 3.3 مراجعه کنید) تا سیستم استنتاج فازی (FIS) را قادر سازد تا پارامترهای خود را از طریق یک فرآیند یادگیری تکراری تنظیم کند. در عین حال، این مدل با بیان پایگاه دانش فازی و طرح استدلال، ANN را شفافتر میکند. هدف این مقاله توسعه یک مدل جدید مبتنی بر عصبی-فازی مبتنی بر چند لایه مبتنی بر دانش مبتنی بر دانش هوشمند است که میتواند بهتر از مدلهای فازی نوع ممدانی عمل کند (به بخش 3.3 مراجعه کنید) .) و با برخی از پیشرفته ترین مدل های یادگیری ماشین کار می کند، اما توانایی توضیح طرح استدلال برای تشخیص حالت زمان واقعی را دارد. بنابراین، این مقاله فرض میکند که یک رویکرد عصبی فازی ترکیبی، شکاف توانایی ارائه دانش و ظرفیت یادگیری را در شرایط نامشخص پل میکند و مبادله بین رویکرد مبتنی بر یادگیری ماشین و یک سیستم خبره منطق فازی را جبران میکند و میتواند توسعه دهد. یک طبقه بندی قوی تر و شفاف تر از همتایان خود در تشخیص حالت حمل و نقل در زمان واقعی.
مشارکت های این مقاله به شرح زیر است: (الف) با توجه به بهترین دانش نویسندگان، این اولین کار در زمینه تشخیص حالت حمل و نقل است که در آن یک مدل هوشمند ترکیبی با استفاده از رویکرد یادگیری ماشین و یک سیستم خبره فازی توسعه یافته است. . (ب) این کار عملکرد یک مدل ترکیبی مبتنی بر دانش را در مقایسه با یک مدل صرفاً مبتنی بر دانش و مدلهای یادگیری ماشین بررسی میکند. (ج) این مقاله همچنین یک رویکرد جدید برای مقابله با مشکلات چند طبقه، با استفاده از یک مدل عصبی فازی چند لایه ارائه میکند. بیشتر مدلهای ترکیبی مورد استفاده در سایر حوزههای تحقیقات حملونقل با مشکلات رگرسیونی مانند تخمین زمان سفر، تخمین تقاضا یا رفتار جریان سروکار دارند. با این حال،
در این مقاله، ما اصطلاح “زمان نزدیک به واقعی” را برای اولین بار در تحقیقات تشخیص حالت حمل و نقل معرفی کرده ایم. تشخیص حالتهای حمل و نقل در زمان تقریباً واقعی شبیه به تشخیص فعالیت بر اساس ثانیه به ثانیه در محاسبات فراگیر و سیار است [ 21 ، 22]. با این حال، به دلایل عملی، تشخیص فعالیت (در زمینه حرکت اعضای بدن و تشخیص ژست) با دانهبندی دقیقتر بر اساس دادههای حسگر اینرسی میتواند نسبتاً در یک پنجره زمانی کوتاهتر (معمولاً به ترتیب ۱ تا ۱۰ ثانیه) انجام شود. طول مورد نیاز برای تشخیص حالت حمل و نقل با استفاده از GPS (معمولاً در حدود 60 تا 120 ثانیه). این تفاوت زمانی به دلیل تاخیر زمانی در بهروزرسانی سیگنال GPS معمولی در تلفنهای هوشمند تجاری است. بنابراین، به جای استفاده از اصطلاح “زمان واقعی”، از “زمان نزدیک” برای نشان دادن جزئیات پنجره پرس و جو به روشی کیفی استفاده می کنیم. مدل ارائه شده در این مقاله با یک سیستم استنتاج فازی ممدانی (MFIS) چند ورودی (MIMO) و برخی از مدلهای یادگیری ماشین مقایسه شده است.
ادامه مقاله به شرح زیر تدوین شده است. بخش 2 شامل مرور ادبیات و سپس بخش 3 شامل یک نظریه مختصر از مدل فازی و عصبی فازی است. در بخش 4 ، یک معماری تشخیص حالت زمان واقعی ارائه شده است، به دنبال آن یک پیاده سازی و ارزیابی در بخش 5 ارائه شده است . یک بحث در بخش 6 ارائه شده است . در بخش 7 ، نتیجه گیری و جهت گیری های احتمالی تحقیقات آینده ارائه شده است.
2. بررسی ادبیات
سفر یک مفهوم اصلی در رفتار انسانی، جغرافیای حمل و نقل، مدلسازی تقاضای سفر، تحقیقات بهداشت عمومی، خدمات مبتنی بر مکان (LBS) و محاسبات سیار است. هر یک از این رشته ها به اطلاعات متنوعی در رابطه با سفر، با جزئیات مختلف نیاز دارند. در بافت های شهری، انواع مختلف اطلاعات مربوط به سفر (مانند زمان حرکت، زمان ورود، مسیرهای سفر، مدت زمان، روش، شرکت و اهداف سفر) برای مدیریت ترافیک، درک تقاضای سفر و ترجیحات مردم و همچنین سیاست گذاری مورد توجه است. . چنین اطلاعات مربوط به سفر، از جمله اطلاعات در مورد روش حمل و نقل، به طور سنتی توسط نظرسنجی های کاغذی یا تلفنی جمع آوری می شود [ 23]]. با این حال، نظرسنجی های سنتی وابسته به حافظه هستند و بنابراین، از مشکلات کیفیت داده رنج می برند. نظرسنجی های سنتی سفر نیز محدود به نرخ مشارکت پایین است. به منظور غلبه بر چنین مشکلاتی، اخیراً نظرسنجی های سفر مبتنی بر تلفن هوشمند انجام شده است [ 8 ، 24]] که در آن شرکت کنندگان نیازی به حفظ جزئیات سفر خود ندارند. در عوض، حرکات آنها بهعنوان مسیرهای خام توسط GPS و سایر حسگرهای روی گوشیهای هوشمندشان ثبت میشود. برنامه ای که به این حسگرها دسترسی دارد می تواند به طور خودکار داده های سفر را در پس زمینه بدون دخالت کاربر جمع آوری کند. این دادههای خام باید از نظر معنایی توسط الگوریتمهایی که قادر به تفسیر چنین دادههایی هستند غنی شوند. تنها در این صورت، سیستم های مدیریت پایگاه داده فضایی می توانند اطلاعات مربوط به سفرهای مختلف را از داده های خام استخراج کنند تا به پرسش های مربوطه پاسخ دهند [ 10 ]. تشخیص حالت سفر یک وظیفه مهم در این فرآیند استنتاج مسیر است.
ادبیات موجود مسیرهای تاریخی را بررسی میکند (یعنی تفسیر دادههای خام را پس از تکمیل سفر حل میکند) تا روشهایی را که در طول سفر استفاده شده است، بر اساس ویژگیهای مختلف استنتاج کند. چنین چارچوب های تشخیصی را مدل های تشخیص حالت آفلاین می نامند. از آنجایی که یک سفر می تواند با بیش از یک حالت انجام شود، نیاز به شکستن کل مسیر به بخش های مسیری وجود دارد که در همان حالت طی شده اند. با فرض اینکه راه رفتن در بین هر دو حالت دیگر ضروری است، ژنگ و همکارانش یک تقسیمبندی مبتنی بر راه رفتن را پیشنهاد کردند و سپس اطلاعات حالت را در مسیر استنتاج کردند [ 17]]. آنها چهار مدل مختلف یادگیری ماشین، درخت تصمیم (DT)، شبکه بیزی (BN)، میدان تصادفی شرطی (CRF) و ماشینهای بردار پشتیبان (SVM) را آزمایش کردند و با استفاده از DT حداکثر دقت 75 درصد را به دست آوردند. آنها چهار حالت را با پنج ویژگی سینماتیکی با استفاده از سیگنال های GPS طبقه بندی کردند. لیائو و همکارانش همچنین از اطلاعات GPS برای توسعه یک مدل مبتنی بر CRF برای استنتاج حالتها در طول مسیر استفاده کردند [ 25 ]. دوج و همکارانش از مسیرهای GPS استفاده کردند و یک مدل مبتنی بر SVM با دقت 82 درصد برای چهار حالت با استفاده از سه ویژگی سینماتیکی توسعه دادند [ 26]]. دوج و همکارانش مفهوم ویژگی های جهانی و ویژگی های محلی محاسبه شده از یک مسیر را معرفی کرده اند. آنها در درجه اول از تغییر در سینوسیته و انحراف ویژگی های سینماتیکی مختلف، مانند سرعت و شتاب، از خط میانه استفاده کرده اند [ 26 ]. از آنجایی که GPS به دلیل عوامل محیطی مختلف و کمبود سیگنال با دقت موقعیتی متفاوتی ارائه میشود، اخیراً گرایشی برای ادغام سنسورهای ناوبری اینرسی مختلف، مانند شتابسنجها، با GPS وجود دارد که در [14] بررسی شده است .
استنث و همکارانش از اطلاعات زیرساخت و اطلاعات سرعت برای تشخیص پنج روش با استفاده از پنج ویژگی استفاده کردند. آنها یک مدل تشخیص حالت مبتنی بر درخت تصمیم را توسعه دادند که دقت 93.5٪ را ارائه می دهد [ 15 ]. اوهاشی و همکارانش یک مدل تشخیص حالت مبتنی بر ارتعاش را با استفاده از شبکه بیزی با دقت 80 درصد با تمرکز بر تمایز دقیق بین خودرو و موتور ایجاد کردند، که به نظر میرسد مشکلی چالش برانگیز است، زیرا هر دوی آنها مسیر یکسانی دارند. شبکه و نمایه سرعت و شتاب تقریبا مشابهی را نشان می دهد. آنها سیگنال سنسور ارتعاش را روی گوشی هوشمند جمع آوری کرده اند تا مشخصات ارتعاش حالت های مختلف را ثبت کنند. با این حال، آنها سعی نمیکنند مسیر را تقسیم کنند و به موضوع حالتهای ترکیبی نپرداختهاند [ 27]]. گونزالس و همکارانش یک مدل تشخیص حالت مبتنی بر شبکه عصبی را با استفاده از حسگرهای GPS توسعه دادند. آنها سه روش را با استفاده از هشت ویژگی با دقت 91 درصد تشخیص می دهند [ 13 ]. هممینکی و همکارانش از شتاب سنج برای تشخیص مدالیته استفاده کردند. آنها از یک مدل مخفی مارکوف گسسته (DHMM) و AdaBoost استفاده کرده اند که با آن دقت 84.2% را به دست آورده اند [ 28 ].
در مقایسه با تحقیقات غنی تشخیص حالت آفلاین، تنها چند تلاش برای تشخیص حالت تقریباً واقعی تا کنون انجام شده است. در یکی از آنها، بایون و همکارانش یک مدل تشخیص حالت مبتنی بر شبکه عصبی را با استفاده از سه ویژگی سینماتیکی در زمان تقریباً واقعی در چهار روش توسعه دادند. آنها ادعا می کنند که این مدل در پنجره های پرس و جوی ده دقیقه ای بهترین عملکرد را دارد، که برای آن دقت 82٪ را به دست آوردند. با این حال، پنجرههای زمانی ده دقیقهای ممکن است برای برنامههای خاص، مانند خدمات اضطراری یا سرویسهای مبتنی بر مکان حساس به زمینه [ 11 ، 12 ] بسیار طولانی باشد و ممکن است با تغییر مکرر حالتها از بین بروند.
با در نظر گرفتن این موضوع، چارچوب تشخیص حالت ردی و همکارانش که بر اساس ثانیه به ثانیه با دقت 74 درصد کار می کند [ 14 ] در سناریوهای بلادرنگ مرتبط تر است. از آنجایی که حسگرهای GPS در گوشیهای هوشمند تجاری به دلیل محدودیتهای سختافزاری و نرمافزاری نمیتوانند با جزئیات دقیقتر نمونهبرداری کنند، ادبیات نشان میدهد که چنین پنجرههای پرس و جوی زمانی کوچکی به حسگرهای اضافی (حداقل یک سنسور ناوبری اینرسی) نیاز دارند که میتوانند در فرکانسهای بالاتر نمونهبرداری کنند. ردی و همکارانش از شتابسنج روی گوشی هوشمند برای محاسبه ویژگیهای مبتنی بر شتاب استفاده کردند. آنها همچنین از سنسورهای GPS برای دریافت مقدار سرعت در بازه های زمانی یک ثانیه استفاده کردند.
با این حال، مدلهای تشخیص حالت مبتنی بر یادگیری ماشین به دادههای آموزشی قابل توجهی برای آموزش مدلها نیاز دارند و همچنین فاقد قدرت توضیحی هستند. از سوی دیگر، مدلهای تشخیص حالت مبتنی بر منطق فازی نیازی به آموزش ندارند. در اینجا، این مدل بر اساس دانش تخصصی توسعه یافته است. مدلهای مبتنی بر منطق فازی پایگاه دانش را در قوانین ساده IF-THEN بیان میکنند. مدل ها همچنین می توانند عدم قطعیت، ابهام و عدم دقت را کنترل کنند. Schussler و Axhausen یک مدل تشخیص حالت مبتنی بر منطق فازی را در پنج روش با استفاده از سه ویژگی فقط سرعت توسعه دادند [ 29 ]. Xu و همکارانش یک مدل مبتنی بر منطق فازی ایجاد کردند که می تواند چهار روش را با دقت 93.7٪ تشخیص دهد [ 30]]، و Biljecki و همکارانش یک چارچوب تشخیص حالت مبتنی بر منطق فازی از نوع Sugeno ایجاد کردند که می تواند ده روش را با دقت 91.6% طبقه بندی کند [ 18 ].
موفقیت هر مدل مبتنی بر منطق فازی به دانش تخصصی وارد شده و سازگاری بین یک مشاهده خاص و جهان گفتمان برای هر برچسب زبانی فازی بستگی دارد. از آنجایی که مدلهای مبتنی بر منطق فازی سنتی ممدانی یا سوگنو نمیتوانند پارامترهای عضویت خود را تنظیم کنند، در صورت کمبود دانش تخصصی، زمانی که بر روی دادههای مشاهدات پر سر و صدا اعمال میشوند یا زمانی که روی مشاهدات دیگری اعمال میشوند، از عملکرد پایین رنج میبرند. بافت فضایی از سوی دیگر، مدلهای مبتنی بر شبکه عصبی که توسط [ 12 ، 13] توسعه یافتهاند] و دیگران می توانند در شرایط مختلف به خوبی تنظیم شوند. از این رو، برای غلبه بر محدودیتهای فردی هر دو مدل منطق فازی و یادگیری ماشین (شبکه عصبی)، این مقاله یک چارچوب ترکیبی جدید و قویتر و گویاتر را با ادغام رویکردهای فازی و مبتنی بر شبکه عصبی در یک شبکه عصبی ارائه میکند. سیستم فازی . رویکرد ترکیبی قبلاً با موفقیت در زمینههای دیگری مانند مدلسازی ترافیک، سیستمهای کنترل حمل و نقل مختلف و رفتار انتخاب حالت افراد استفاده شده است.
به عنوان مثال، پانلا و همکارانش یک مدل فازی عصبی برای رسیدگی به جریان ترافیک وسایل نقلیه در یک محیط شهری ایجاد کردند. آنها یک سیستم متمرکز ایجاد کردند که در آن داده های حرکت خودرو منتقل می شود و بر اساس سینماتیک، یک حالت جریان خاص تعیین می شود. آنها از تکنیک خوشهبندی فراصفحه در مرحله آموزش استفاده کردند [ 31 ]. سیستم های فازی عصبی نیز در کنترل ترافیک در انواع مختلف تقاطع ها استفاده شده است. هنری و همکارانش یک مدل فازی عصبی را نشان میدهند که به طور رضایتبخشی در تقاطعهایی با پیچیدگی ساده و متوسط کار میکند. در تقاطع های پیچیده تر، یک مدل عصبی فازی نیاز به ادغام با یک کنترل بهینه دارد [ 32]. Wannige و همکارانش در مطالعه شبیه سازی شده خود یک سیستم کنترل ترافیک مبتنی بر فازی عصبی را توسعه دادند. آنها از دو تقاطع ترافیکی چهار طرفه و جاده ای استفاده کردند که هر دو تقاطع را به هم وصل می کرد. آنها بررسی کرده اند که چگونه رفتار ترافیکی در آن بخش جاده خاص بین دو تقاطع تغییر می کند و چگونه سیستم ترافیک با شرایط مختلف سازگار می شود. مطالعه آنها نشان می دهد که یک سیستم کنترل ترافیک مبتنی بر منطق فازی عصبی بهتر از یک سیستم کنترل سیگنال زمان ثابت کار می کند. این مدل همچنین زمان تاخیر را به طور قابل توجهی در طول مراحل نور قرمز در هر اتصال به حداقل می رساند. Wannige و همکارانش همچنین نشان دادند که چگونه چراغهای راهنمایی در هر دو تقاطع زمانی که حجم ترافیک در یکی از دو تقاطع به طور قابلتوجهی افزایش مییابد، به طور تطبیقی همگام میشوند [ 33] .]. در یک کار کمی متفاوت، Dell’Orco و همکارانش یک مدل عصبی فازی برای پیش بینی تصمیمات کاربران در انتخاب حالت حمل و نقل [ 34 ] توسعه دادند. فرض آنها بر اساس عدم قطعیت و عدم دقت در داده ها در یک محیط شهری است. آنها با استفاده از قوانین فازی ساده نشان داده اند که چگونه می توان ادراک کاربران را در ویژگی های زبانی رمزگذاری کرد. این مدل در پیشبینی رفتار انتخاب حالت کاربران بهتر از مدل مبتنی بر ابزار تصادفی عمل میکند.
با این حال، مدل های عصبی فازی هنوز برای تشخیص حالت سفر استفاده نشده اند. با توجه به ویژگی های حالت های سفر، مدل ارائه شده دارای برخی ویژگی های متمایز خواهد بود که در بخش های بعدی مورد بحث قرار می گیرد.
3. نظریه
در این بخش، تعاریف و مفاهیم اولیه مربوط به مسیرها و معماری مدل ارائه شده است. مسیرها در این مقاله با فرض اینکه نقاط فضا-زمان با استفاده از حسگر موقعیتیابی گرفته شدهاند، تعریف میشوند.
3.1. مسیرها
یک مسیر ( تیrتی�) دنباله ای از نقاط مکانی-زمانی مرتب شده زمانی است ( پمنپمن) که رفتار حرکتی فرد را در یک مکان و زمان معین از نظر مختصات نشان می دهد ( ایکسمن،yمن،zمنایکسمن،�من،�من) در یک فضای اقلیدسی سه بعدی در یک زمان معین ( تیمنتیمن). با این حال، برای مطالعه حالت های سفر، مقدار z را می توان نادیده گرفت. مسیرها را میتوان توسط منابع مختلفی مانند پستهای بازرسی یا محاصره [ 35 ]، ثبتکنندههای داده GPS قابل حمل [ 36 ]، حسگرهای GPS روی گوشیهای هوشمند [ 8 ]، دوربین مدار بسته [ 37 ]، یا کارتهای هوشمند [ 38 ] ثبت کرد. تعداد کمی. یک مسیر را می توان به صورت ریاضی به صورت زیر بیان کرد:
یک مسیر (خام) با ترکیب اطلاعات زیرساخت و دانش دامنه در یک زمینه معین به یک مسیر معنایی تبدیل می شود.
3.2. تشخیص حالت نزدیک به زمان واقعی
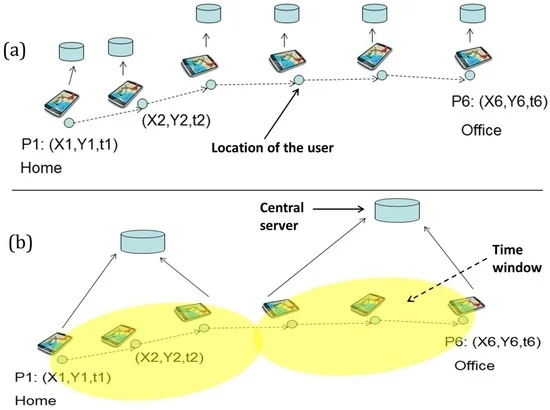
بر خلاف تشخیص حالت زمان واقعی، این تحقیق با تشخیص حالت زمان واقعی می پردازد. تفاوت بین این دو مفهوم در تاخیر در زمان پاسخ است (Vis-à-Vis در استراتژی استنتاج). برای تشخیص بلادرنگ، اطلاعات مکان به صورت ثانیه به ثانیه یا با دانه بندی بسیار خوب پینگ می شود. با این حال، تلفن های هوشمند تجاری مبتنی بر اندروید از تخلیه باتری در استفاده زیاد از GPS رنج می برند. علاوه بر آن، در یک محیط شهری، مسیر GPS شامل شکاف های سیگنال مکرر و اثرات چند مسیری است که یک نمونه ریز دانه را برای تشخیص حالت ها غیرقابل اعتماد می کند. از سوی دیگر، برخلاف حرکت اعضای بدن در زمینه تشخیص فعالیت در محاسبات فراگیر و متحرک [ 21]]، حالت حمل و نقل بهطور مکرر در عرض چند ثانیه تغییر نمیکند، و بنابراین، یک پنجره زمانی نسبتاً درشتتر که حاوی بیش از یک قطعه اطلاعات موقعیت مکانی GPS است، برای تشخیص حالتهای نزدیک به واقعی مفید تلقی میشود. بازیابی اطلاعات زمانی برای مفاد خدمات مختلف مبتنی بر تحرک. شکل 1 a یک مفهوم تشخیص حالت بلادرنگ را نشان می دهد که در آن تلفن هوشمند به طور مداوم اطلاعات موقعیت مکانی خود را به صورت ثانیه به ثانیه (یا در فاصله زمانی تعیین شده توسط فرکانس نمونه برداری) به یک سرور مرکزی پینگ می کند، در حالی که شکل 1 b، فواره های نزدیک را نشان می دهد . -سناریوی زمان واقعی دنباله کوتاهتری از نقاط GPS که در یک پنجره زمانی معین حاوی اطلاعات سینماتیک غنیتر برای تشخیص حالت به سرور مرکزی ارسال میشوند.
3.3. سیستم خبره فازی
یک سیستم خبره فازی بر اساس نظریه مجموعه های فازی [ 39 ] است. برخلاف نظریه مجموعه واضح که در آن یک عنصر در یک مجموعه مشخص وجود دارد یا وجود ندارد، نظریه مجموعه فازی یک مقدار عضویت را به یک عنصر اختصاص میدهد و بنابراین، مفهوم عضویت جزئی آن عنصر را در تعدادی مجموعه (های مختلف) معرفی میکند. ). اگر A یک مجموعه فازی است که بر روی جهانی از گفتمان U تعریف شده است ، عضویت یک عنصر y در A را می توان با یک تابع عضویت (MF) تعریف کرد. μآ( y)�آ(�)در بازه زمانی [0، 1]. این را می توان به صورت ریاضی به صورت زیر بیان کرد.
یک متغیر فازی از طریق یک مجموعه فازی بیان می شود که با مجموعه ای از مقادیر فازی نسبت داده می شود. بنابراین، یک متغیر فازی A را می توان با مجموعه ای از مقادیر فازی، که به عنوان مجموعه اصطلاحی { T } شناخته می شود، و مجموعه ای از توابع عضویت { M }، که در آن:
دو نوع مدل فازی استفاده می شود. اینها مدل فازی ممدانی و مدل فازی تاکاگی-سوگنو-کانگ (TSK) هستند که بیشتر به عنوان مدل فازی سوگنو شناخته می شود. در یک مدل فازی ممدانی، هم مقدم ( IF ) و هم نتیجه ( THN ) هر دو فازی هستند. قسمت IF حاوی واقعیت و سپسبخش شامل نتیجه گیری است. در مورد رویکرد فازی ممدانی، هم واقعیت و هم نتیجه هر دو قطعی نیستند، که در اکثر موقعیت های واقعی به دلیل محدودیت در معماری سیستم، اکتساب داده ها، سطح متفاوت ادراک کاربر، کیفیت داده ها و نتیجه پیش بینی شده در یک زمینه معین. یک قاعده فازی ممدانی تک خروجی چند ورودی (MISO) را می توان به صورت زیر نمایش داد.
آرمتر 1آرمتر1: اگر avg_speed زیاد و avg_acceleration یکنواخت باشد، Delay_time کم است.
در مقابل، یک مدل فازی Sugeno شامل یک مقدم فازی و یک بخش نتیجه واضح است که به طور کلی بر حسب تابع چند جملهای مرتبه ‘n’ بیان میشود. یک قانون فازی Sugeno را می توان به صورت زیر نشان داد.
آرs 1آرس1: اگر avg_speed زیاد و avg_acceleration یکنواخت باشد، Delay_time 10 ثانیه است.
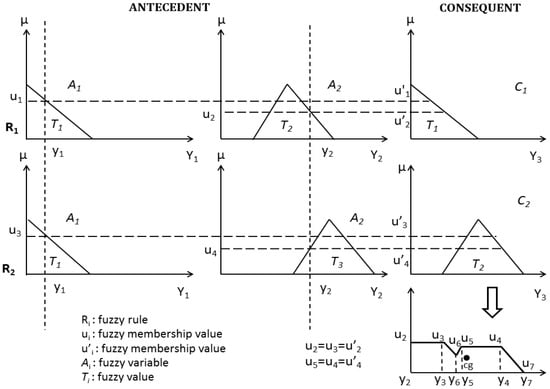
در هنگام توسعه پایه قاعده، هر قانون شامل تعدادی واقعیت است که با استفاده از یک t -norm یا t -conorm یا یک عملگر نفی ترکیب می شوند. در این تحقیق، پایههای قوانین توسعهیافته همگی بر اساس یک عملگر t -norm هستند. در اجرای یک قانون معین، از یک عملگر MIN برای انتخاب حداقل مقدار عضویت از تعدادی متغیر پیشین فازی استفاده می شود. آمنآمن) برای به دست آوردن نتیجه مربوطه ( سیمنسیمن) لایه در عملکرد متعاقب. هنگامی که همه قوانین اجرا می شوند، همه لایه های بعدی انتخاب شده جمع می شوند. به منظور تولید مقدار خروجی نهایی (ترد) از لایه متعاقب ترکیبی، که مربوط به مرکز ثقل (cg) لایه متعاقب ترکیبی است. شکل 2 نشان می دهد که چگونه هر قانون شلیک می شود، و لایه های بعدی پس از اجرا شدن همه قوانین ترکیب می شوند. در این شکل ( شکل 2 )، دو قانون نشان داده شده است که در آن قوانین،
آر1آر1: اگر آ1آ1است تی1تی1و آ2آ2است تی2تی2، سپس سی1سی1است تی1تی1.
آر2آر2: اگر آ1آ1است تی1تی1و آ2�2است تی3�3، سپس سی2�2است تی2�2.
برای ورودی های داده شده زمانی که متغیر فازی است آ1�1= y1�1و آ2�2= y2�2، هر قانون اجرا می شود و نتیجه فازی مربوطه استنباط می شود. به منظور عدم فازی سازی قسمت بعدی و به دست آوردن خروجی نهایی ( افo��) روش “مرکز ثقل” به شرح زیر استفاده می شود.
برخلاف مدل فازی ممدانی، در مورد مدل فازی مرتبه اول Sugeno، هنگام شلیک هر یک، قاعده قسمت بعدی بر حسب تعدادی ضرایب مقدار واضحی به خود میگیرد. p , q، ر�,�,�) بر اساس یک تابع داده شده است. به عنوان مثال، در مثال قبلی، در قانون 1، زمانی که آ1�1= y1�1و آ2آ2= y2�2، خروجی سی1سی1= f(y1،y2)�(�1،�2)، جایی که:
هر قانون ( آرمنآرمن) خروجی خود را با قدرت شلیک وزن می کند wمن�من. هنگامی که همه قوانین اجرا می شوند، یک میانگین وزنی برای تولید استفاده می شود افoاف�برای یک مدل Sugeno مشخص.
در مورد مدل Sugeno مرتبه صفر، p و q اساساً صفر می شوند. هر دو مدل فازی مرسوم ممدانی و سوگنو به پایه قانون مناسب و توابع عضویت وابسته هستند. اغلب، انتخاب یک تابع عضویت مناسب همراه با پارامترهای مشخصه آن برای یک مجموعه فازی معین دشوار است. سیستم های خبره فازی نیز نمی توانند در شرایط مختلف یاد بگیرند و برای اصلاح نیاز به مداخله متخصص انسانی دارند. به منظور انتخاب پارامترهای تابع عضویت به طور خودکار و به نوبه خود ساختن پایه قانون، یک تکنیک ترکیبی مبتنی بر دانش، مانند یک سیستم استنتاج عصبی فازی تطبیقی (ANFIS)، مورد نیاز است.
3.4. سیستم استنتاج عصبی فازی تطبیقی
یک سیستم استنتاج عصبی-فازی تطبیقی (ANFIS) یک مدل ترکیبی مبتنی بر عصبی-فازی است که با عملکرد و فرآیند استدلال خود معادل یک مدل فازی Sugeno است، در حالی که با توجه به آن معادل یک شبکه عصبی (با ساختار پیوندگرا) است. معماری و توانایی یادگیری [ 40 ]. ANFIS به یک مرحله آموزشی نیاز دارد که پایگاه دانش را با مجموعه ای از قوانین و توابع عضویت با پارامترهای تابعی که به طور خودکار انتخاب می شوند، اولیه می کند. آموزش از طریق تعدادی تکرار انجام می شود. یک مدل ANFIS استاندارد از یک یادگیری ترکیبی با استفاده از پاس رو به جلو و عقب پیروی می کند [ 41 ]. یک مدل ANFIS از پنج لایه تشکیل شده است.
لایه 1 یک لایه فازی سازی است. ورودی ها در این لایه بر اساس توابع عضویت مربوطه فازی می شوند. در شکل 3 ، گره ها آمنآمنو بمنبمنبه ترتیب مقادیر زبانی ورودی x و y هستند . پارامترهای درگیر در تابع عضویت داده شده، پارامترهای پیشین نامیده می شوند. گره ها در لایه 1 گره های تطبیقی هستند به این معنا که گره ها به تغییر پارامترهای پیشین در مرحله آموزش برای دستیابی به حداقل خطا ادامه می دهند. لایه 2 شامل پایه قانون با عملگر t -norm است که به طور کلی معادل MIN یا عملگر محصول در نظر گرفته می شود [ 42 ]. گره های لایه 2 همگی گره های ثابت هستند. هر گره در لایه 2 قدرت شلیک ( wمن _�لمن) از قانون مربوطه، که در آن ( wمن _�لمن) را می توان به صورت زیر بیان کرد:
جایی که μآ(ایکسمن)�آ(ایکسمن)تابع عضویت مجموعه فازی A برای یک متغیر زبانی i برای یک قانون معین r است ، با فرض اینکه تعداد کل متغیرهای زبانی V باشد . سپس قدرت شلیک توسط گره های لایه 3 به صورت زیر نرمال می شود:
که در آن l شماره لایه، و r تعداد گره در یک لایه معین و n تعداد کل گره ها در لایه l است.
لایه 4 قسمت بعدی هر قانون را بر اساس قدرت شلیک محاسبه می کند. یک مدل ANFIS بر اساس معماری Sugeno برای محاسبه بخش بعدی آن است. یک مدل Sugeno مرتبه اول یک بخش نتیجه را به صورت زیر محاسبه می کند:
جایی که Or��خروجی یک بخش بعدی برای قانون r است ، سrس�قدرت شلیک نرمال شده است و آrآ�، بrب�و p پارامترهای بعدی هستند. لایه 5 تمام بخشهای بعدی را از قوانین مربوطه جمعآوری میکند و برای تولید خروجی کلی از حالت فازی خارج میشود. Of��):
در مورد یک مدل Sugeno مرتبه صفر، بخش بعدی به p ساده می شود . پارامترهای بعدی در یک گذر رو به جلو با استفاده از تخمین حداقل مربع تنظیم می شوند که در آن عبارت خطا ( E ) می تواند به صورت زیر بیان شود:
جایی که Eک( الف ، ب )�ک(آ،ب)عبارت خطا برای است k − t hک–تیساعتورود در داده های آموزشی، تیکتیکخروجی هدف برای k − t hک–تیساعتورودی، و N تعداد کل تکرارها است. بنابراین، خطای کلی این است:
هدف به حداقل رساندن است Eک( الف ، ب )�ک(آ،ب)و از این رو، توابع هدف را می توان به صورت ریاضی بیان کرد
به منظور تعیین پارامترهای پیشین و متعاقب آن از روش انتشار برگشتی ترکیبی استفاده می شود. پارامترهای بعدی از طریق تخمین حداقل مربعات در گذر رو به جلو تعیین می شوند، در حالی که پارامترهای پیشین با استفاده از تکنیک نزول گرادیان در گذر به عقب تعیین می شوند. قوانین را می توان به یکی از سه روش ایجاد کرد: پارتیشن بندی شبکه، خوشه بندی تفریقی یا خوشه بندی c -means فازی (FCM). در این مقاله، از تکنیک پارتیشن بندی شبکه ای برای جستجوی کل فضای ورودی و تولید تمامی قوانین ممکن استفاده شده است. بنابراین، اگر V تعداد متغیرهای زبانی و m تعداد مقادیر زبانی برای هر متغیر باشد، تعداد کل قوانین n است.است:
4. چارچوب های دانش محور برای تشخیص حالت حمل و نقل در زمان واقعی
در این بخش، دو مدل دانش محور مبتنی بر منطق فازی توسعه داده شده است. در چارچوب اول، یک سیستم استنتاج فازی MIMO Mamdani (MFIS) توسعه یافته است که مبتنی بر دانش کارشناسی پیشینی (بدون هیچ آموزشی) است. در چارچوب دوم، یک مدل ترکیبی مبتنی بر دانش با استفاده از رویکرد عصبی فازی توسعه مییابد.
4.1. چارچوب 1: مدل فازی ممدانی چند خروجی چند ورودی
MIMO MFIS ارائه شده در این مقاله از یک موتور استنتاج فازی متشکل از 76 مجموعه قانون فازی (پایه قوانین) تشکیل شده است. بخش مقدم شامل پنج متغیر فازی با سه مقدار فازی برای هر یک از متغیرها است ( جدول 1 ). بخش بعدی شامل چهار راهحل جایگزین ( اتوبوس، قطار، تراموا، پیادهروی ) با فاکتورهای قطعیت متناظر آنها (CF) از 0 تا 100 است. قوانین به گونهای تدوین شدهاند که میتوانند کیفیتهای مختلف (سطح عدم دقت) را مدیریت کنند. اطلاعات موقعیتی و رفتار سینماتیکی متفاوت نشان داده شده توسط یک حالت انتقال داده شده. به منظور ترکیب حقایق مختلف در قسمت مقدم و متعاقب، یک تعملگر -norm (AND) استفاده می شود. متغیرهای فازی در بخش بعدی مستقل از یکدیگر هستند. با این حال، مقدار قطعیت آنها (CF) به شلیک قانون و بردار ویژگی ورودی داده شده بستگی دارد. به منظور عدم فازی سازی خروجی های بعدی، یک روش مرکز ثقل اجرا شده است. توابع عضویت همه به صورت دستی انتخاب می شوند. شکل 4 یک مدل MIMO MFIS را نشان می دهد که در این مقاله توسعه یافته است. برخی از قوانین فازی (از 76 مورد) به شرح زیر است.
R1: اگر میانگین سرعت کم است و حداکثر سرعت کم است و avgBusProx دور است و avgTrainProx دور است و avgTramProx متوسط است، سپس CF برای پیاده روی زیاد است و CF برای اتوبوس کم است و CF برای قطار کم است و CF برای تراموا کم است.
R2: اگر میانگین سرعت متوسط است و حداکثر سرعت متوسط است و avgBusProx نزدیک است و avgTrainProx دور است و avgTramProx دور است، سپس CF برای پیاده روی کم است و CF برای اتوبوس زیاد است و CF برای قطار کم است و CF برای تراموا کم است.
R3: اگر میانگین سرعت متوسط و حداکثر سرعت متوسط است و avgBusProx متوسط است و avgTrainProx دور است و avgTramProx متوسط است، سپس CF برای پیاده روی کم است و CF برای اتوبوس متوسط است و CF برای قطار کم است و CF برای تراموا زیاد است.
R4: اگر میانگین سرعت زیاد است و حداکثر سرعت زیاد است و avgBusProx دور است و avgTrainProx نزدیک است و avgTramProx دور است، سپس CF برای پیاده روی کم است و CF برای اتوبوس متوسط است و CF برای قطار زیاد است و CF برای تراموا متوسط است.
R5: اگر میانگین سرعت متوسط است و حداکثر سرعت زیاد است و avgBusProx دور است و avgTrainProx دور است و avgTramProx دور است، CF برای پیاده روی کم است و CF برای اتوبوس زیاد است و CF برای قطار کم است و CF برای تراموا کم است.
4.2. چارچوب 2: مدل عصبی فازی تطبیقی چند لایه (MLANFIS)
در تحقیقات حمل و نقل موجود و سیستم های کنترل ترافیک، مدل های ANFIS با مشکلات نوع رگرسیون سروکار دارند. در مقابل، در این مقاله، یک مشکل چند کلاسه مطرح شده است که نیازمند توسعه یک مدل ANFIS چند لایه (MLANFIS) به منظور ارائه یک چارچوب تشخیص حالت حمل و نقل در زمان واقعی است (شکل 5 ) . هسته چارچوب یک لایه پردازشی است که شامل تعدادی بلوک مودال ANFIS به صورت موازی است که در آن هر بلوک مودال ANFIS مربوط به یک کلاس مشخص است. اگر K تعداد کلاس ها وجود داشته باشد ، K اعداد بلوک های مدال ANFIS وجود خواهد داشت . از این رو، کاردینالیته چارچوب K است. از آنجایی که هر بلوک مودال ANFIS به صورت موازی و بدون هیچ گونه ارتباط مستقیمی بین آنها آموزش داده می شود، هر بلوک مودال ANFIS دارای پایه قوانین خاص خود است.
در این مقاله، حالتهای حمل و نقل در یک مسئله طبقهبندی طبقهبندی میشوند، که به دلیل ماهیت آن در تولید مقادیر واقعی پیوسته، پرداختن به آن در یک رویکرد عصبی فازی استاندارد ممکن نیست. از این رو، مسئله طبقه بندی ابتدا به یک مسئله رگرسیون تبدیل می شود، جایی که هر بلوک مودال ANFIS با ارزیابی باینری یک کلاس مودال معین سروکار دارد. یک بلوک مودال ANFIS توسط یک کلاس مودال خاص (مقدار طبقهبندی) که با آن سروکار دارد و سطح قطعیت (مقدار واقعی) یک کلاس معین معین نسبت داده میشود. برای هر کلاس مدال، مجموعه ای جداگانه از نمونه های آموزشی (نمونه های آموزشی) و یک مدل ANFIS توسعه می یابد. در هر مجموعه آموزشی، هر بردار ویژگی یک عامل قطعیت است ( سیافسیاف) صفر یا یک، که تعلق آن بردار مشخصه را به یک کلاس مشخص می کند. از این رو اگر K اعداد کلاسهای مدال وجود داشته باشد ، K تعداد مجموعههای آموزشی وجود دارد ، که در آن هر مجموعه از نمونههای آموزشی دارای مجموعهای از بردارهای ویژگی است، اما الگوهای خروجی متفاوتی دارد. برای مثال، گذرگاه کلاس مدال شامل نمونههایی در بردار ویژگی داده شده است که بخشهایی از یک مسیر هستند که یک اتوبوس را نشان میدهند، سپس خروجی بر حسب یک کمیت میشود. سیافسیافاز یک (به بخش 3.3 مراجعه کنید ). اگر بردار ویژگی مربوط به اتوبوس نباشد، خروجی سیافسیافبه صورت صفر محاسبه می شود. این فرآیند برای همه نمونههای هر مجموعه آموزشی برای کلاسهای مدال K تکرار میشود . منطق پشت چنین کمی سازی قطعیت این است که هر بلوک ANFIS (مرتبط با یک کلاس معین معین) به گونه ای آموزش داده می شود که اگر ( A Nافمناستی)(آنافمناستی)با نمونه آزمایشی تغذیه می شود ( فvتی: t e s t fe a t u r e v e c t o r )(��تی:تیهستی�هآتیتو�ه�هجتی��)، برخی را اختصاص خواهد داد سیافسیافبه عنوان یک خروجی از طریق فرآیند استدلال آن بسته به بردار ویژگی ورودی. اگر نمونه یک مدالیته معین را نشان دهد، حداکثر را به دست خواهد آورد سیافسیافمربوط به آن بلوک مدال ANFIS.
چارچوب از چهار لایه تشکیل شده است ( شکل 5 ). لایه 1 لایه ورودی است که حاوی بردار ویژگی ورودی است. لایه 2 لایه پردازشی است که از بلوک های مدال ANFIS آموزش دیده (ANFIS) تشکیل شده است تیتی) برای هر کلاس یکی. لایه 3 لایه خروجی برای هر بلوک مودال ANFIS است. لایه 4 لایه ارزیابی است که در آن همه موارد سیافسیافخروجی ها با استفاده از عملگر argmax برای انتخاب حداکثر مقدار جمع شده و ارزیابی می شوند . کلاس پیشبینیشده برای آن بردار ویژگی ورودی داده شده بر اساس حداکثر تعیین میشود سیافسیافتولید شده توسط بلوک مدال ANFIS آموزش دیده مربوطه. بنابراین، در زمان تقریباً واقعی، هر پرس و جو به صورت موازی در بلوک های مدال ANFIS مختلف ارزیابی می شود و یک کلاس مودال بر اساس حداکثر پیش بینی می شود. سیافسیافارزش.
5. ارزیابی
5.1. مجموعه داده ها
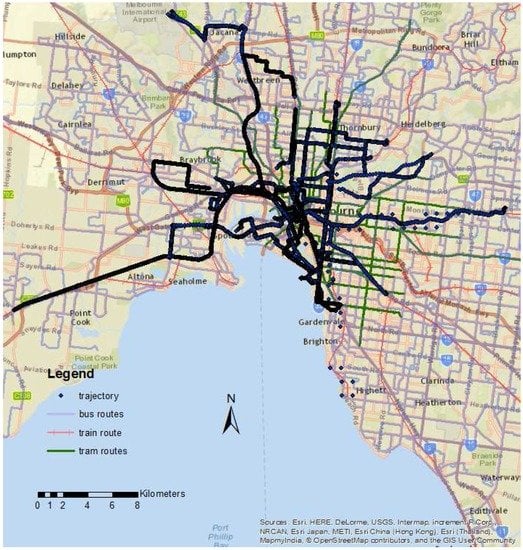
به منظور ارزیابی فرضیه و آزمایش مدل، یک مجموعه داده GPS در ملبورن بزرگ استرالیا به مدت 85 ساعت جمعآوری شد که طی سه ماه با استفاده از یک برنامه کاربردی در تلفن هوشمند مبتنی بر اندروید جمعآوری شد. مجموعه داده شامل 106 مسیر در مجموع 612375 نقطه GPS است. مجموعه داده شامل چهار روش اتوبوس ، قطار ، تراموا و پیاده روی است که چهار روش عمومی رایج در یک محیط شهری هستند ( شکل 6 ). برخلاف بررسیهای فراخوانی فوری [ 43 ، 44 ]، حقیقت زمینی در پرواز ثبت شد، و از این رو، اطلاعات حقیقت زمینی سازگار و بسیار دقیق است.
مجموعه دادهها مدالیتههای ویژگیهای مشابه در مسیرهای مختلف، و همچنین روشهای مختلف در مسیرهای همپوشانی را پوشش میدهد (بخشی از شبکه اتوبوس با شبکه تراموا همپوشانی دارد). از آنجایی که در این مقاله، یک تشخیص حالت زمان واقعی انجام می شود، یعنی هیچ بخش بندی قبلی را نمی توان تولید کرد، این احتمال وجود دارد که در هر پنجره زمانی معین، دو حالت ممکن است با هم وجود داشته باشد. در این حالت، فرض بر این است که همیشه یکی از آنها در حال راه رفتن است، زیرا تنها یک پیاده روی بین دو روش مختلف غیر پیاده روی ارتباط برقرار می کند. برای اینکه این همیشه درست باشد، وسعت پنجره زمانی باید کوچکتر از هر بخش پیاده روی فردی انتخاب شود. حالتهای موجود در یک پنجره زمانی معین به عنوان یک ترکیب نامیده میشودحالت با این حال، از مشاهده در یک پنجره زمانی کوتاهتر (مثلاً 60 ثانیه تا 120 ثانیه) حداکثر دو حالت وجود دارد که یکی از آنها باید پیاده روی باشد . از این رو، تمام حالتهای ترکیبی در این تحقیق با عنوان راهپیمایی مشخص شدهاند .
5.2. پیش پردازش و آماده سازی ویژگی
قبل از تولید بردارهای ویژگی، هر مسیر پیش پردازش شده است. مرحله پیش پردازش شامل فیلتر کردن یک مسیر بر اساس دقت موقعیتی است که در آن هر نقطه GPS با دقت موقعیتی کمتر از 40 متر (یعنی محور اصلی بیضی اطمینان بیش از 40 متر است) به عنوان نویز در نظر گرفته می شود و از مسیر حذف می شود. داده های خام GPS در مختصات WGS84 جمع آوری شد. به منظور انجام تحلیل فضایی، مجموعه داده بر روی سیستم مختصات GDA94 و سپس محاسبه ویژگی پیش بینی شد.
در این چارچوب پنج ویژگی محاسبه میشود: سرعت متوسط ، حداکثر سرعت (که در واقع صدک 95 حداکثر سرعت است )، میانگین نزدیکی به شبکه اتوبوس ، میانگین نزدیکی به شبکه تراموا و میانگین نزدیکی به شبکه قطار.. از آنجایی که پیادهروی میتواند در هر جایی انجام شود (مثلاً نزدیک به مسیر اتوبوس یا خیابان یا شبکه قطار در حین انتقال)، نزدیکی به شبکه خیابان در این تحقیق استفاده نشده است. مقادیر مجاورت با استفاده از یک بافر فضایی 40 متری (با فرض دقت موقعیتی استاندارد GPS در این تحقیق) از هر نقطه GPS به نزدیکترین شبکه اتوبوس، شبکه قطار و شبکه تراموا محاسبه می شود. در صورتی که شبکه ای در شعاع 40 متری وجود نداشته باشد، مقدار مجاورت با آن شبکه از یک نقطه GPS معین به عنوان 100 متر تعیین می شود تا از مقدار صفر یا نزدیکی صفر جلوگیری شود. مجموعه داده به مجموعه داده های آموزش، بررسی و آزمایش تقسیم می شود. مسیرهایی که به عنوان مجموعه داده های آموزشی انتخاب شده اند، مدت زمان سفر بیشتری نسبت به مسیرهای مورد استفاده برای تولید مجموعه داده های بررسی و آزمایش دارند.جدول 2 ). پس از آموزش چهار بلوک مدال ANFIS، هر یک از آنها 243 قانون فازی مجزا تولید می کند.
5.3. آزمایش کنید
پنج مجموعه از تنظیمات آزمایشی بر اساس اندازه پنجره زمانی در حال رشد طراحی شده اند که از 30 ثانیه، 40 ثانیه، 50 ثانیه، 60 ثانیه و 120 ثانیه شروع می شود. به منظور مقایسه عملکرد چارچوب پیشنهادی (MLANFIS) تعدادی از مدلهای یادگیری ماشین نیز بر اساس یک شبکه عصبی پرسپترون چندلایه (MLP)، یک شبکه عصبی مبتنی بر تابع پایه شعاعی (RBF)، یک درخت تصمیم توسعه داده شدهاند. (DT)، نزدیکترین همسایه K (KNN) و یک بیز ساده لوح (NB). نتیجه در یک پنجره زمانی 60 و 120 ثانیهای نشان میدهد که MLANFIS دقت قابلتوجهی برای تشخیص حالتهای مختلف حملونقل در زمان تقریباً واقعی دارد.
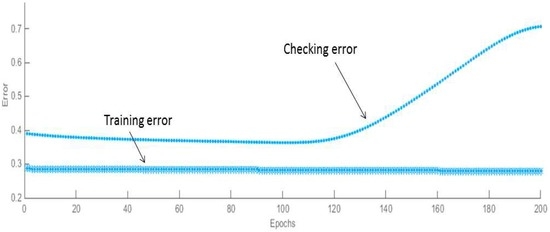
به منظور ارزیابی، داده های آموزشی و آزمایشی یکسان برای مدل MLANFIS و همه مدل های یادگیری ماشین استفاده شده است. از آنجایی که MFIS نیازی به آموزش ندارد، بنابراین یک مدل MFIS تنها با استفاده از مجموعه داده آزمایشی مورد ارزیابی قرار گرفت که برای آزمایش توانایی پیشبینی MLANFIS و مدلهای یادگیری ماشین استفاده شده است. هنگام ساخت مدل MLANFIS از یک مجموعه داده بررسی استفاده می شود تا مطمئن شود مدل بیش از حد برازش نمی کند. جدول 2 تعداد ویژگی های مورد استفاده به عنوان آموزش، بررسی و آزمایش مجموعه داده ها را برای مدل های مختلف نشان می دهد. شکل 7نشان می دهد که چگونه خطای بررسی و خطای آموزش با تعداد تکرارها (دوران) متفاوت است. در مجموع 200 تکرار برای هر ساختمان بلوک مودال MLANFIS انجام می شود. یک خطای آموزشی کاهش تدریجی بزرگی بیش از 200 تکرار را نشان می دهد. از سوی دیگر، خطای بررسی کاهش تدریجی بزرگی را تا یک دوره خاص و به دنبال آن افزایش ناگهانی بزرگی نشان میدهد. آن نقطه بحرانی لحظه ای را نشان می دهد که مدل شروع به بیش از حد برازش می کند. پارامترهای تابع عضویت در آن دوره خاص قبل از افزایش خطای بررسی انتخاب می شوند.
برای اندازهگیری دقت مدلها از دقت دقیق و دقت فراخوان استفاده میشود که بر اساس مثبتهای واقعی است. t pتیپ، مثبت کاذب ( fپ�پ، منفی های واقعی ( t nتی�و منفی کاذب ( fn��). فرمول دقت و دقت فراخوانی به شرح زیر ارائه می شود:
جدول 3 و جدول 4 یادآوری و دقت دقیق هفت مدل مختلف پیش بینی، از جمله MLANFIS و MFIS را در پنجره زمانی 60 ثانیه نشان می دهد. از نظر دقت فراخوانی، MLANFIS بهتر از مدل MFIS عمل می کند و عملکردی برابر با مدل های یادگیری ماشین برای حالت پیاده روی، قطار و تراموا دارد . با این حال، MLANFIS در مقایسه با مدلهای یادگیری ماشینی، از نظر دقت یادآوری برای گذرگاه ضعیف عمل میکند. از سوی دیگر، مدل MFIS از نظر دقت دقیق، به ویژه برای قطار (96.86٪) و تراموا (87.91٪) بهتر از MLANFIS و سایر مدل های یادگیری ماشین عمل می کند. MLANFIS بهترین عملکرد را دارد و از نظر دقت دقیق برای اتوبوس بسیار نزدیک به مدل RBF است(92.19%). این نشان میدهد که قوانین تولید شده برای بلوک ANFIS اتوبوس در مدل MLANFIS به درستی تنظیم شدهاند و بنابراین هنگام ارزیابی توسط MLANFIS، خطای نوع I کمتری برای گذرگاه ایجاد میشود. با این حال، قوانین موجود در بلوک ANFIS اتوبوس به اندازه کافی برای ثبت تمام رفتارهای سینماتیکی و کیفیت سیگنال در حین سواری اتوبوس کافی نیست، و از این رو، اگرچه MLANFIS خطای نوع I کمتری ایجاد می کند، اما خطای نوع II بالاتر برای اتوبوس، که منجر به پایین آمدن می شود . دقت به یاد آوردن برای حالت اتوبوس ، در مقایسه با مدل های یادگیری ماشین. از آنجایی که مدل های مختلف پیش بینی برای حالت های مختلف از نظر دقت و یادآوری عملکرد متفاوتی دارند، بنابراین برای ارزیابی عملکرد کلی مدل ها، یک امتیاز F1 ( F) در نظر گرفته می شود که دقت و فراخوان را با هم ترکیب می کند.
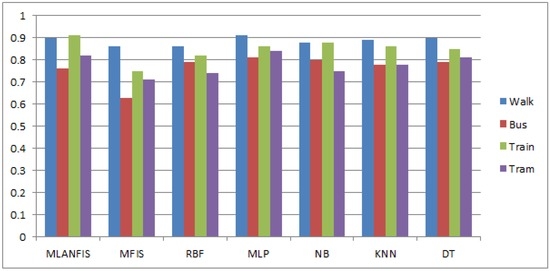
از نظر امتیاز F1، MLANFIS مانند MLP و DT برای تشخیص حالت راه رفتن عمل می کند و از MFIS و سایر مدل های یادگیری ماشین بهتر است ( شکل 8 ). MLANFIS از تمام مدل های دیگر برای تشخیص حالت قطار بهتر عمل می کند. برای تشخیص حالت قطار، MLANFIS 0.91 امتیاز F1 به دنبال آن 0.88 توسط MLP می دهد که بالاترین امتیاز F1 تولید شده توسط هر مدل یادگیری ماشینی است. برای حالت ترام، MLANFIS بازدهی 0.82 دارد که بسیار نزدیک به MLP است که 0.84 بازده دارد و یک مدل DT که یک امتیاز F1 0.81 ایجاد می کند. با این حال، برای تشخیص حالت اتوبوس، MLANFIS 0.76 امتیاز F1 ایجاد میکند که کمتر از مدلهای یادگیری ماشینی است، اما بالاتر از مدل MFIS است ( شکل 8 ).
هنگامی که در یک پنجره زمانی 120 ثانیه ارزیابی می شود، MLANFIS همان الگو را از نظر فراخوانی و دقت دقیق و همچنین امتیاز F1 نشان می دهد. MLANFIS بالاترین دقت فراخوانی را برای حالت راه رفتن دارد که 92.87 درصد است که توسط MFIS و DT که تقریباً 91.4 درصد هستند ثانویه شده است. برای تشخیص حالت قطار ، RBF بالاترین دقت فراخوانی را دارد که 99.10٪ است، در حالی که MLANFIS 94.31٪ دقت ایجاد می کند. با این حال، یک MFIS دقت 74.40٪ را برای تشخیص حالت قطار ایجاد می کند که عملکرد بدتری نسبت به MLANFIS و مدل های یادگیری ماشین نشان می دهد. MFIS همچنین در مقایسه با MLANFIS و مدل های یادگیری ماشینی از نظر دقت فراخوان برای اتوبوس و تراموا ضعیف عمل می کند.تشخیص حالت از نظر دقت دقیق برای قطار ، MFIS بهترین عملکرد را دارد و دقت 94.57٪ را ایجاد می کند، پس از MLANFIS که 89.23٪ دقت ایجاد می کند، در حالی که بالاترین دقت توسط مدل یادگیری ماشین (NB در این مورد) ایجاد شده است که 87.70٪ است. ( جدول 5 ). با این حال، از نظر امتیاز F1، MLANFIS از همه مدلهای پیشبینیکننده برای تشخیص حالت قطار بهتر عمل میکند، در حالی که با مدلهای یادگیری ماشین (و عملکرد بهتر از MFIS) برای حالت پیادهروی ، تشخیص کار میکند ( شکل 9 ). برای حالت ترام MLANFIS بازدهی 0.84 دارد که بسیار نزدیک به MLP (0.86) و DT (0.83) است و عملکرد بهتری از MFIS (0.74)، RBF (0.78)، NB (0.76) و KNN (0.80) دارد.
هنگامی که مقایسه ای فقط بین دو نوع مختلف از مدل های دانش محور (مثلا MLANFIS و MFIS) انجام می شود، نتایج نشان می دهد که MLANFIS بهتر از MFIS عمل می کند ( شکل 8 و شکل 9 ). برای یک پنجره زمانی 60 ثانیه، MFIS خطای نوع II بالایی را برای حالت اتوبوس، قطار و تراموا در مقایسه با MLANFIS ایجاد می کند. بنابراین یک MFIS کاهش دقت یادآوری را برای حالت های مختلف حمل و نقل عمومی به جز پیاده روی نشان می دهد ( جدول 3 ). با این حال، یک مدل MFIS دقت بالاتری را برای حالت قطار و تراموا ( جدول 4 ) نسبت به مدل MLANFIS به دست میدهد، در حالی که MFIS در مقایسه با MLANFIS از نظر عملکرد بدتر عمل میکند.تشخیص حالت اتوبوس و پیاده روی این را میتوان به دلیل ویژگیهای پایه قوانین برای ثبت رفتارهای سینماتیکی متفاوت در مدل MFIS در شرایط سرعت کم، و نزدیکی متوسط به شبکه تراموا یا شبکه قطار، بخشی از تراموا یا قطار واقعی توجیه کرد . سفر به عنوان پیاده روی تشخیص داده می شود . با این حال، بیشتر نمونه های تراموا و قطار بازیابی شده به دلیل دقت بالا در قطار و تراموا به درستی شناسایی می شوند.تشخیص حالت قانون MFIS همچنین زمانی که بین شبکه تراموا و شبکه اتوبوس همپوشانی وجود دارد، به خوبی کار نمی کند. یک MLANFIS معمولاً می تواند بهتر از مدل MFIS در چنین موقعیت های مبهم کار کند و عملکرد کلی بهتری نسبت به مدل MFIS نشان می دهد ( شکل 8 ). برخی از قوانین فازی (از 243) تولید شده توسط بلوک مدال گذرگاه MLANFIS به شرح زیر است:
R1: اگر avgSpeed کم است و maxSpeed کم است و avgBusProx کم است و avgTrainProx کم است و avgTramProx کم است، سپس CF برای Bus out1mf1 است.
R2: اگر avgSpeed کم است و maxSpeed کم است و avgBusProx کم است و avgTrainProx کم است و avgTramProx متوسط است، CF برای Bus out1mf2 است.
جایی که مقدار CF برای منتی ساعتمنتیساعتبخش نتیجه برای j t h�تیساعتقانون فازی
جدول 6 یک ماتریس سردرگمی را برای MLANFIS در یک پنجره زمانی 60 ثانیه نشان می دهد. ماتریس سردرگمی نشان میدهد که بیشتر خطاهای نوع II برای حالتهای غیر پیادهروی به اشتباه به عنوان راه رفتن طبقهبندی میشوند و این در هنگام از دست دادن سیگنال یا معمولاً در شرایط سرعت پایین رخ میدهد. این نشاندهنده تشکیل قانون دقیقتر با ترکیب اطلاعات بیشتر حسگر، مانند شتابسنج است.
چارچوب MLANFIS توسعهیافته در این مقاله همچنین میتواند راهحلهای جایگزین با درجات مختلف اطمینان تولید کند. برای یک بردار ویژگی مشخص که در آن سرعت متوسط 64.6 کیلومتر در ساعت، حداکثر سرعت 73.9 کیلومتر در ساعت، میانگین نزدیکی به شبکه اتوبوسرانی 88.4 متر، میانگین نزدیکی به شبکه قطار 7.15 متر و میانگین نزدیکی به تراموا است. شبکه 88.4 متر است، MLANFIS یک ضریب اطمینان را برای قطار بودن 0.782 ( شکل 10 الف) و برای اتوبوس بودن 0.106 ( شکل 10 ب) تولید کرد. با توجه به محدودیت فضا، شکل 10 تنها 29 قانون از 243 قانون را برای هر قطار و اتوبوس نشان می دهد.بلوک مودال ANFIS. این همچنین قدرت توضیحی و امکان خروجی چندگانه از چارچوب پیشنهادی MLANFIS را توضیح میدهد که در مدلهای یادگیری ماشین وجود ندارد.
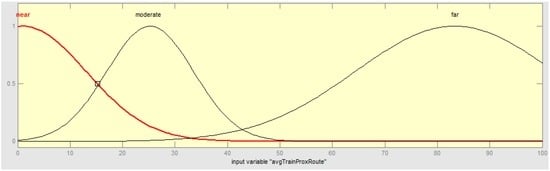
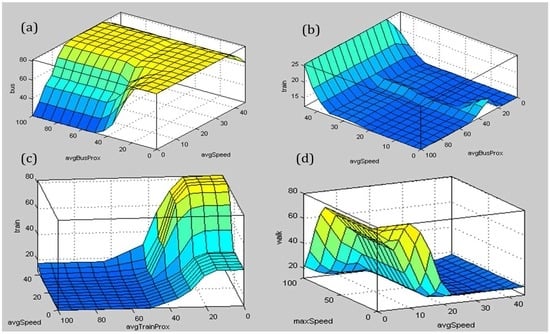
از آنجایی که انتخاب تابع عضویت مناسب هنگام توسعه یک مدل مبتنی بر دانش مهم است، بنابراین دو تابع عضویت فازی مختلف مانند یک تابع ذوزنقهای و یک تابع گاوسی هنگام توسعه مدلهای MLANFIS و MFIS آزمایش میشوند. با این حال، به دلیل ماهیت هندسی واضح تابع ذوزنقه، مواردی وجود دارد که یک ویژگی ورودی ممکن است خارج از محدوده معینی از تابع عضویت فازی قرار گیرد و بنابراین ممکن است به دلیل عملکرد پایین در فرآیند پیشبینی آن، مقدار عضویت صفر را داشته باشد. از سوی دیگر، از آنجایی که تابع گاوسی ماهیت مجانبی دارد، تضمین می کند که مقدار عضویت معینی را همیشه در محدوده [ m , 1] تولید کند.لیمm → 0لیممتر→0. یک تابع عضویت ذوزنقه ای با چهار نقطه مشخصه مشخص می شود (بالا سمت چپ، بالا راست، چپ پایین و پایین راست)، در حالی که یک تابع عضویت گاوسی تنها با دو پارامتر مشخصه مانند مرکز (c) و عرض (σ) مشخص می شود . جدول 7 پارامترهای مختلفی را برای MLANFIS نشان میدهد که به طور خودکار بر اساس یادگیری ترکیبی شامل نزول گرادیان و برآورد حداقل مربعات انتخاب میشوند، در حالی که پارامترهای MFIS به صورت دستی انتخاب میشوند که منجر به ابهام بالاتر و عملکرد پایین در سناریوی زمان واقعی میشود. شکل 11 و شکل 12 دو مجموعه از سه تابع عضویت گاوسی مختلف را برای میانگین نزدیکی به شبکه قطار در MLANFIS و MFIS به ترتیب نشان میدهند.شکل 13 نشان می دهد که چگونه عامل قطعیت با دو متغیر فازی متفاوت تغییر می کند. شکل یک تضاد برجسته بین تغییر CF برای اتوبوس و قطار را با در نظر گرفتن همان متغیرهای فازی مانند میانگین نزدیکی به شبکه اتوبوس و سرعت متوسط نشان میدهد ( شکل 13 a,b). از آنجایی که پیادهروی میتواند در هر جایی انجام شود، در این تحقیق از نزدیکی به شبکه خیابان استفاده نمیشود، زیرا خیابانهای ملبورن همپوشانی قابلتوجهی با شبکه تراموا و اتوبوس نشان میدهند. بنابراین برای تشخیص راه رفتن عمدتاً یک رفتار با سرعت کم در نظر گرفته می شود ( شکل 13 د).
برای تابع عضویت ذوزنقه ای، دقت فراخوان در پنجره زمانی 60 ثانیه برای MLANFIS و MFIS به طور قابل توجهی کاهش می یابد. برای MLANFIS، برای پیاده روی ، دقت یادآوری از 92.58٪ به 89.31٪ کاهش می یابد، برای دقت اتوبوس ، از 65.21٪ به 57.52٪ کاهش می یابد. برای قطار، از 93.33٪ به 88٪. برای دقت تراموا؛ کاهش از 88.94٪ به 85.42٪. برای MFIS، کاهش چشمگیرتر است. برای MFIS، دقت یادآوری برای اتوبوس از 61.20٪ به 51.67٪ کاهش می یابد. برای قطار ، از 61.77٪ به 40.22٪ کاهش می یابد و برای تراموادقت از 60.06% به 35.74% کاهش می یابد. بنابراین، نتیجه نشان میدهد که یک تابع گاوسی بهتر از یک تابع عضویت ذوزنقهای برای تشخیص حالت زمان واقعی با استفاده از مدلهای دانش محور مبتنی بر منطق فازی است. نتایج همچنین نشان میدهد که یک ترکیب عصبی-فازی (MLANFIS) بهتر از یک مدل MFIS مبتنی بر منطق فازی مبتنی بر دانش صرفاً کار میکند و با برخی از مدلهای یادگیری ماشینی پیشرفته عمل میکند و حتی گاهی اوقات برای بسیاری از مکانها از آنها بهتر عمل میکند. ( شکل 8 ).
6. بحث
طبقه بندی حالت حمل و نقل یک مشکل تحقیقاتی نوظهور است که توسط جوامع تحقیقاتی مختلف مورد بررسی قرار می گیرد. در این مقاله مفهوم تشخیص حالت حمل و نقل در زمان واقعی را معرفی کرده ایم. ما یک مدل مبتنی بر عصبی فازی چند لایه (MLANFIS) ایجاد کردهایم. به منظور انتخاب پنجره زمانی بهینه در زمان نزدیک، پنج مجموعه آزمایش انجام شد. بر اساس نتایج یک پنجره زمانی 60 ثانیه ای به عنوان پنجره بهینه انتخاب می شود که می تواند دقت رضایت بخشی ایجاد کند. با این حال تصمیم گیری برای یک پنجره زمانی بهینه ذهنی است و ممکن است از یک دامنه خدماتی به حوزه دیگر متفاوت باشد. به عنوان مثال، یک سازمان مدیریت ترافیک ممکن است یک پنجره زمانی طولانی تر (بیش از 120 ثانیه) را بپذیرد اگر هدف اصلی درک ترجیح حالت و حمایت از یک نوع مسیر معین (مثلاً مسیر قطار) باشد، با این فرض که
از سوی دیگر، برای یک ارائهدهنده خدمات اضطراری یا سازمان بازاریابی الکترونیکی مبتنی بر مکان، یک بازه زمانی کوتاهتر (≤120 ثانیه) مورد نیاز است، زیرا تمرکز اصلی برقراری ارتباط با کاربر در آگاهی از حالت سفر فعلی (مثلاً یک گاز) است. ایستگاه می خواهد چند کوپن بنزین با تخفیف را برای همه خودروهای شخصی در فاصله 1 کیلومتری تبلیغ کند). پنجره زمانی کوتاهتر برای همه سیستمهای آگاه از زمینه لازم است که به شیوه سفر فعلی مربوط میشوند (مثلاً پاسخگویی خودکار به تماس تلفنی دریافتی در حالی که شخص تماسگیری شده در حال رانندگی است). در مقایسه با مدل ANN توسط بایون و همکارانش که از پنجرههای طولانیتر (به ترتیب 5 دقیقه و 10 دقیقه) استفاده کردند [ 12 ]، این مقاله پیشرفتی است که اجازه میدهد پنجرههای زمان کوتاهتر 1 دقیقه یا 2 دقیقه با استفاده از نمونهها و زیرساختهای GPS فقط استفاده شود. اطلاعات
با این حال، تنها با استفاده از نمونههای GPS، به دلیل محدودیتهای سختافزاری و نرمافزاری سیستم سنجش (و همچنین حفظ باتری) نمیتوان یک پنجره زمانی کوتاهتر از شناسایی فعالیتهای داخلی را دریافت کرد. جدول 6 دقت افت MLANFIS را عمدتاً به دلیل این واقعیت نشان می دهد که همه حالت های غیر پیاده روی اغلب به اشتباه به عنوان حالت راه رفتن در هنگام از دست دادن سیگنال یا در شرایط سرعت پایین طبقه بندی می شوند که می توان در آینده با ادغام اینرسی های مختلف برطرف شود. حسگرهایی که می توانند با نرخ نمونه برداری بسیار بالاتری نسبت به حسگر GPS روی گوشی های هوشمند حس کنند.
MLANFIS بهبود عملکرد را برای برخی از حالت ها در افزایش پنجره زمانی به ویژه برای پیاده روی و تراموا نشان می دهد . این مدل همچنین دقت متفاوتی را هنگام انتخاب توابع مختلف عضویت نشان میدهد. این تحقیق همچنین نشان میدهد که چگونه دانش محور (MFIS) و مدل دانش محور ترکیبی (MLANFIS) میتوانند طرح استدلال خود را برخلاف مدلهای یادگیری ماشین معمولی توضیح دهند.
با این حال موفقیت MFIS به تعداد قوانین فازی و ارتباط آنها بستگی دارد. موفقیت MFIS همچنین در عملکردهای عضویت مناسب و شکل آنها نهفته است که می تواند به طور خودکار توسط MLANFIS مدیریت شود. با این حال، مدل MLANFIS توسعه یافته در این مقاله بر اساس پارتیشن بندی شبکه است که به طور جامع کل فضای ورودی را جستجو می کند. بنابراین افزایش تعداد ویژگیها (متغیرهای فازی) همراه با مجموعه اصطلاحات آنها، تعداد قوانین را نیز افزایش میدهد که بر “نفرین ابعاد” تأثیر میگذارد [ 41 ]. اگرچه در این مقاله به پیچیدگی مرتبط با مدل ها پرداخته نشده است، به طور کلی یک پارتیشن بندی شبکه ای از پیچیدگی زمانی و استفاده از حافظه بالاتر رنج می برد. این موضوع را می توان در مدل های ترکیبی پیچیده تر با اتخاذ یک خوشه بندی تفریقی یا فازی حل کرد.c- رویکرد خوشهبندی معنیدار (FCM).
7. نتیجه گیری
در این مقاله، ما به چالشهای تشخیص حالتهای حملونقل در زمان نزدیک، به ویژه برای برآورد تقاضای سفر در زمان واقعی به نفع مقامات حملونقل عمومی و مفاد خدمات مختلف آگاه از زمینه پرداختهایم. این مقاله یک چارچوب مبتنی بر دانش ترکیبی مبتنی بر عصبی-فازی برای یک سیستم استنتاج در زمینه تحرک شهری ارائه میکند. از آنجایی که این تحقیق بر روی یک رویکرد زمان واقعی متمرکز شده است، نیازی به بخش بندی مسیرها مانند روش موجود در تشخیص حالت حمل و نقل در مسیرهای تاریخی وجود ندارد. و بنابراین این رویکرد باعث کاهش سربار محاسباتی و زمان پاسخ خواهد شد. با بهترین دانش نویسندگان، این اولین اثری است که در آن یک مدل ترکیبی، چند لایه ANFIS (MLANFIS) برای رسیدگی به مشکل طبقهبندی تشخیص حالت حمل و نقل توسعه داده شده است. در این مقاله یک پنجره زمانی بهینه نیز برای پرس و جو در زمان تقریبا واقعی پیشنهاد شده است. ما همچنین مقایسه ای در عملکرد بین تعدادی از مدل های دانش محور و تعدادی از مدل های یادگیری ماشین انجام داده ایم.
نتیجه نشان میدهد که در برخی موارد برخی از مدلهای یادگیری ماشینی عملکرد خوبی دارند، اما مانند یک جعبه سیاه عمل میکنند و ظرفیت توضیح فرآیند استدلال خود را ندارند. یک مدل مبتنی بر DT میتواند فرآیند استدلال را به روشی قطعیتر بر اساس آستانهای در هر سطح توضیح دهد که با این حال در شرایط مختلف متفاوت است و نمیتواند یک رفتار سینماتیک عمومی را به روشی زبانی برای درک انسان نشان دهد. از سوی دیگر، MFIS مبتنی بر مجموعه قوانین عمومی از پیش تعریف شده است که توسط یک ماشین و یک انسان قابل درک است، اما از آنجایی که این فرآیند مستلزم دانش تخصصی در ساخت پایه قوانین و توابع عضویت است، یک مدل MFIS در این موقعیت شکست میخورد. توسط متخصص یا در شرایطی که دانش تخصصی قدیمی است به مدل توضیح داده نشده است.روابط n -ary از طریق عملگرهای مختلف t -norm و در قالبی قابل خواندن توسط انسان بیان می شود. بنابراین یک مدل عصبی فازی قوی تر و موثرتر از مدل فازی است. نتایج نشان میدهد که یک مدل عصبی-فازی میتواند برای اکثر مدالیتهها همتراز با الگوریتمهای یادگیری ماشین عمل کند در حالی که از یک مدل منطق فازی سنتی بهتر عمل میکند ( شکل 8) .). مدل ترکیبی ارائه شده در این مقاله قادر به ایجاد احتمالات متناوب با عوامل قطعیت مختلف است. طرح استدلال همچنین میتواند رفتار رانندگی یک فرد و انحراف از رفتار عادی را بر اساس نوع قوانین اجرا شده توضیح دهد، که سپس میتواند مفاد خدمات مرتبط با زمینه خاص حالتهای مختلف را راهاندازی کند. نتیجه همچنین نشان می دهد که یک رویکرد دانش محور (فازی و عصبی-فازی) همچنین می تواند با یک طرح استدلال شفاف به دقت بالاتری دست یابد ( جدول 3 و جدول 4 ). جدول 4 نشان می دهد که MLANFIS از نظر دقت دقیق برای گذرگاه از همه مدل های یادگیری ماشین بهتر است.در پنجره زمانی 60 ثانیه در همین راستا، یک MFIS نیز از نظر دقت دقیق برای قطار و تراموا از مدلهای یادگیری ماشین بهتر است .
در پنجره زمانی 60 ثانیه، MLANFIS دقت متوسط 83 درصدی را به دست میدهد که در هر مدل RBF، DT و NB است و از مدل فازی صرفاً مبتنی بر دانش، که تنها 69 درصد دقت متوسط تولید میکند، بهتر عمل میکند. با این حال، یک مدل شبکه عصبی مبتنی بر MLP 87% دقت متوسط تولید میکند که بالاتر از مدل عصبی فازی توسعهیافته در این مقاله است. اما در عین حال چارچوب عصبی فازی توسعهیافته در این مقاله میتواند فرآیند استدلال آن را توضیح دهد، که در یک MLP یا RBF یا حتی در یک مدل مبتنی بر DT وجود ندارد. علاوه بر آن، یک مدل فازی معمولی نمی تواند به طور تطبیقی یاد بگیرد و بنابراین در برابر نویز مقاوم نیست. در مقابل، مدل عصبی فازی ارائه شده می تواند نویز را تحمل کند و با شرایط مختلف سازگار شود. مدل عصبی فازی توسعهیافته در این مقاله عملکرد ثابتتری نسبت به مدل مبتنی بر منطق فازی در سناریوی زمان واقعی نشان میدهد. مدل عصبی فازی نیز در برابر برخی دیگر از مدلهای یادگیری ماشین (مانند SVM) آزمایش میشود که در آن مدل عملکرد بهتری نسبت به رویکردهای یادگیری ماشین نشان میدهد.
این چارچوب نشان میدهد که یک مدل MLANFIS میتواند طرح استدلال خود را بیاموزد و توضیح دهد، که بر محدودیتهای سیستمهای خبره فازی معمولی از نوع MFIS که توسط [ 18 ، 30 ] و همچنین مدلهای یادگیری ماشین (به عنوان مثال، شبکه عصبی) توسعه داده شده است، غلبه میکند [ 12 ، 13] . ]. در این مقاله از چهار حالت حملونقل شهری برای آزمایش مدل MLANFIS استفاده شده است که در آن حالتهای قطار ، تراموا و پیادهروی با دقت بالا و به دنبال آن اتوبوس شناسایی میشوند.حالت با این حال، مدل را می توان به راحتی برای مدالیته های بیشتر همراه با ویژگی های ورودی بیشتر گسترش داد. این ممکن است ابهام را افزایش دهد، به ویژه زمانی که دو مدالیت الگوهای حرکتی مشابهی را نشان میدهند و شبکه یکسانی را به اشتراک میگذارند (مثلاً، یک ماشین و یک اتوبوس در یک مسیر سریع با همان سرعت بالا حرکت میکنند). در چنین شرایطی به ویژگی های بیشتری مانند نرخ توقف، سرعت تغییر سمت، ارتعاش و مشخصات صدای محیط نیاز است: همه اینها به راحتی در مدل گنجانده می شوند.
تحقیقات آینده چگونگی رفتار مدل را در ادغام سیگنالهای حسگر مختلف مانند شتابسنج، ژیروسکوپ و GPS بررسی خواهد کرد. این ادغام همچنین به چالشهای جدیدی منجر میشود که چگونه حسگرها را با کیفیت دادههای متفاوت و توانایی نمونهبرداری در فرکانسهای مختلف ترکیب کنیم. تحقیقات آینده همچنین به چگونگی تبدیل مجموعه قوانین مبتنی بر Sugeno به مجموعه قوانین فازی MIMO Mamdani می پردازد که بخش بعدی ممکن است شامل خروجی های متعددی باشد که به زبان طبیعی برای بازنمایی دانش کامل بیان شده اند. در همین راستا، تحقیقات آینده میتواند مرتبطترین مجموعههای قوانین را برای هر بلوک مدال در یک مدل MLANFIS در زمینه تشخیص حالت سفر بررسی کند .










بدون نظر