


خلاصه
تا به حال، تعمیم شبکه جاده ای عمدتاً برای وظیفه تعمیم از یک مقیاس منبع ثابت به مقیاس هدف ثابت دیگر اعمال شده است. این اقدامات منجر به تفاوت های زیادی در محتوا و نمایش می شود، به عنوان مثال، تغییر ناگهانی نمایش بخش های جاده از مناطق به خطوط، که ممکن است کاربران را گیج کند. بنابراین، هدف ما تعمیم پیوسته یک شبکه جادهای برای کل محدوده است، از مقیاس بزرگ، که در آن جادهها به عنوان منطقه نشان داده میشوند، تا مقیاسهای متوسط و کوچک، که در آن جادهها بهتدریج بیشتر به صورت خطوط نشان داده میشوند. در نتیجه این فرآیند، یک محدوده مقیاس متوسط وجود دارد که در آن در همان زمان برخی از جاده ها به عنوان مناطق نشان داده می شوند، در حالی که برخی دیگر به عنوان خطوط نشان داده می شوند. ما یک مدل داده جدید را همراه با یک ساختار داده خاص پیشنهاد می کنیم که در آن برای همه اشیاء نقشه، طیفی از مقیاس های نقشه معتبر ذخیره می شود. این مدل مبتنی بر نمایش یکپارچه و صریح از موارد زیر است: (1) یک پارتیشن منطقه مسطح. و (2) یک شبکه جاده خطی. این فرآیند تعمیم را قادر می سازد تا دانش و درک یک شبکه خطی را در بر گیرد. این مقاله بیشتر گزینهها و الگوریتمهای تعمیم واقعی را برای پر کردن این ساختار داده با محتوای کارتوگرافی در مقیاس متنوع با کیفیت بالا مورد بحث قرار میدهد.
کلید واژه ها:
مقیاس متنوع ; صاف _ تعمیم نقشه پیوسته ; شبکه جاده ای ؛ ترازو
1. معرفی
تعمیم خودکار نقشه برای سال ها یک حوزه تحقیقاتی مهم بوده است [ 1 ، 2 ، 3 ]، و همچنین موضوع این مقاله است. به طور خاص، بهجای ایجاد دنبالهای از نقشههای راه با مقیاسهای مجزا/سطوح جزئیات (LOD) که تاکنون رایج بوده است، ما تعمیم افزایشی را در کل طیف پیوسته LODها پیشنهاد میکنیم. این مبتنی بر این ایده است که اگر ویژگیها در مراحل کوچک تعمیم داده شوند، انتقال صاف بین نمایشهای شیء بعدی میتواند مشتق شود [ 4 ، 5 ، 6 ، 7]]. در نتیجه، به تدریج به یک نقشه ساده تر و ساده تر منجر می شود. این مراحل تعمیم در ساختار داده در مقیاس متغیر به نام tGAP (پارتیشن منطقه تعمیم یافته توپولوژیکی)، که در [ 8 و 9 ] پیشنهاد شده است، ذخیره می شود.
مفهوم مقیاس متغیر به طور بالقوه می تواند برای یک گروه کاربر هدف گسترده از نرم افزار ناوبری، از طریق GIS دسکتاپ تا برنامه های کاربردی تلفن همراه اعمال شود. با این حال، توسعه اخیر بر روی برنامه های کاربردی آنلاین با انتقال داده های برداری موثر تمرکز دارد [ 7 ]. این یک رویکرد متفاوت برای نقشههای مقیاس گسسته معمولی در اینترنت ارائه میکند. این نقشههای گسسته تغییرات ناگهانی بین مقیاسها دارند که میتواند منجر به گمراهی، سردرگمی و در نهایت ناامیدی کاربران نقشه شود. شکل 1 یک شبکه جاده ای دقیق را در یک مقیاس نقشه در مقایسه با شبکه پراکنده در مقیاس موجود بعدی نشان می دهد.
در این مقاله، فرض کاری ما این است که با گرفتن کل فرآیند تعمیم از داده های ورودی در مقیاس بزرگ، به تدریج از مناطق (مقیاس بزرگ) و/یا ادغام در خطوط (مقیاس کوچک)، می توان نمایش بهتری به دست آورد. با خواص زیر:
-
اتصال شبکه (جاده ای) بهتر حفظ شده است.
-
تغییرات در هندسه و/یا طبقه بندی تدریجی است.
-
جزئیات کوچک به تدریج حذف می شوند (بن بست های مهم (بن بست) حذف نمی شوند و بن بست جدیدی ایجاد نمی شود).
-
معناشناسی شبکه جاده در نظر گرفته می شود و تصور کلی نقشه بهبود می یابد.
این ممکن است در تئوری تصور بهتری به کاربر بدهد، به عنوان مثال، در حین بزرگنمایی و کوچکنمایی. توجه داشته باشید که آزمایش کاربر باید آن را در یکی از انتشارات آینده تأیید کند [ 10 ].
از سوی دیگر، یک اثر جانبی فاز انتقال از مقیاس بزرگ به مقیاس کوچک این است که نمایشهای منطقه و خط با هم مخلوط میشوند، به عنوان مثال، جادههای درجه دوم میتوانند در مقیاس نقشه یکسان تا حدی توسط مناطق و تا حدی با خطوط نشان داده شوند. بنابراین، رویکرد ما بر روی نمایشهای همگن بخش جاده از طریق طراحی متکی نیست. این یک موضوع غیر پیش پا افتاده برای ساختارهای داده مرسوم است و نیاز به مدل سازی داده های خاص و اصلاح ساختار داده دارد که هر دو از اهداف اصلی این مقاله هستند. در مقالات قبلی در مورد دادههای مقیاس متغیر با استفاده از ساختار tGAP، چندین بار (در بخش “کار آینده”) ذکر شده است که باید امکان و بسیار مطلوب باشد که شامل ویژگیهایی باشد که دارای یک نمایش خطی برای بهبود محتوای نقشه به طور قابل توجهی حالا برای اولین بار
به طور خلاصه، هدف اصلی ما معرفی نمایش ویژگی های خط در ساختار tGAP برای داشتن پشتیبانی بهتر و محتوای داده برای بزرگنمایی صاف است. برای دستیابی به چنین هدفی، بر اساس مفهوم مقیاس متنوع خود، نیازمندی های زیر را داریم:
-
مهمترین چیز این است که با مناطق مختلط و نمایش های خطی برخورد کنید.
-
برای تعمیم در مراحل کوچک.
-
برای استفاده از پارتیشن ناحیه به عنوان ورودی.
-
برای حفظ معنای شبکه راه.
بخش باقی مانده از این مقاله به شرح زیر است. بخش 2 کار مرتبط را مرور می کند و ساختار داده در مقیاس متغیر را با جزئیات بیشتر توضیح می دهد. به دنبال آن بخش 3 ، که کل فرآیند تعمیم شبکه جادهای را با جزئیات توضیح میدهد. بخش 4 نتایج را نشان می دهد. در نهایت، بخش 5 مقاله را به پایان میرساند و چند سؤال باز برای کار آینده ما ارائه میکند.
2. کارهای مرتبط
تعدادی از تلاشهای قبلی راههای تعمیم شبکههای جادهای را بررسی کردهاند. جاده ها (به طور مشابه رودخانه ها و کانال های آب) به عنوان اشیاء خطی/زیرساختی “ستون فقرات” بسیاری از انواع نقشه ها هستند. آنها خوانایی نقشهها را بهبود میبخشند و به کاربران کمک میکنند تا موقعیتهای دنیای واقعی به تصویر کشیده شده را آسانتر جهتدهی و تشخیص دهند. علاوه بر آن، تعمیم شبکه جاده یک پیش نیاز برای سایر اقدامات تعمیم توپوگرافی (اپراتورها) است و بنابراین یک عملیات اساسی در فرآیند کلی تولید نقشه و پایگاه داده است [ 11] .]. بنابراین، پردازش جاده به طور گسترده مورد مطالعه قرار گرفته است که در آن در یک مقیاس معین، دو نمایش اصلی از جاده ها ممکن است یافت شود: نمایش خطی و منطقه. در نقشههای بزرگ، برای کشورهایی مانند بلژیک، جمهوری چک، هلند یا بریتانیا، یک بخش جاده با هندسه منطقه نشان داده میشود. مجموعه مناطق جاده ای با هم نشان دهنده شبکه راه است. این مناطق یک نمودار شبکه جاده ای ضمنی را تشکیل می دهند که از لبه ها و گره ها تشکیل شده است. در مقیاس های کوچکتر، بخش های جاده با هندسه خط نشان داده می شوند. این خطوط به طور مستقیم با لبه ها در نمودار شبکه جاده مطابقت دارند. در مقیاسهای کوچکتر (با بخشهای جاده که مستقیماً به عنوان لبهها نشان داده میشوند)، تعمیم شبکه جاده میتواند بر موارد زیر تأکید داشته باشد: (1) خود نمایش خطی جاده. یا (2) مناطق بین جاده ها به عنوان مناطق محدود شده توسط حداقل حلقه ها یا چرخه های جاده، به عنوان مثال، شامل منطقه ساخته شده، جنگل یا زمین. رویکرد تأکید خطی، شبکه را به عنوان مجموعهای از عناصر متصل خطی در نظر میگیرد، در حالی که رویکرد تأکید بر مناطق بر «فضای بین» جادهها متمرکز است. گاهی اوقات، اصطلاح “پارتیشن منطقه” [12 ] یا “مش چگالی” [ 13 ، 14 ، 15 ] استفاده می شود. برای تعمیم شبکه جادهای در مقیاس کوچکتر، که در آن بخشهای جاده بهصورت خطوط نشان داده میشوند، هر دو نما (چه خطی یا تأکید بر منطقه) مزایا و معایب خاص خود را دارند [ 12 ].
علاوه بر این، در مقیاسهای کوچکتر دو دیدگاه اصلی در رویکرد با تمرکز بر نمایش شبکه خطی وجود دارد: (1) ضربهها. و (2) تعمیم بخش. تعمیم مبتنی بر سکته مغزی، بخشهای جاده را به خطوط طولانیتری گروهبندی میکند، که ممکن است بدون تلاقی صریح از یکدیگر عبور کنند. تصمیم برای تلاقی ممکن است بر اساس برخی معیارها، مانند هندسه (زاویه بین بخش ها)، توپولوژی (درجه گره دو)، ویژگی یا طبقه بندی [ 13 ، 16] باشد.]. در تعمیم مبتنی بر بخش، بخش های جاده (از اتصال به اتصال، که در آن درجه توپولوژیک گره های انتهایی بیشتر از دو است) کوچکترین عناصر اتمی برای حذف هستند. مزیت اصلی استفاده از strokes مشهود است: اطلاعات مربوط به اتصال بین بخش ها را حفظ می کند. این نشان می دهد که رویکرد مبتنی بر سکته مغزی می تواند یک ابزار تعمیم مفید باشد. با این حال، Turner 2007 [ 17 ] اشاره می کند که تجزیه و تحلیل بخش (ایجاد یک نقشه قطعه که در جامعه نحوی فضا شناخته شده است) می تواند خروجی قابل مقایسه یا بهتری را در مقایسه با روش مبتنی بر سکته مغزی ارائه دهد و حتی نتایج معنی داری را تولید کند، به عنوان مثال، بهتر در ارتباط با جریان وسیله نقلیه مشاهده شده در واقعیت.
علاوه بر این، نشانههایی از تغییر تحولات به سمت راهحلهای هموار و پیوسته در تعمیم وجود دارد که منجر به نمایشهایی در مقیاس متنوع میشود. این امر به ویژه در مورد شبکه جاده ها صادق است. Cecconi و همکاران بررسی تعمیم خودکار بر اساس تقاضا برای وب [ 18 ، 19]. اگرچه آنها فقط راه حل های چند مقیاسی را مطالعه می کنند، برخی از مفاهیم برای راه حل ما نیز معتبر هستند. آنها فرض می کنند که اشیاء متناظر از LOD های مختلف به هم مرتبط هستند و کاربر با کمک تعمیم در حین پرواز می تواند یک مقیاس متوسط بین آنها انتخاب کند. به این ترتیب، تعمیم ادراک شده را می توان به عنوان یک فرآیند ” درون یابی ” (یا شکل گیری) بین دو هندسه مختلف درک کرد. آنها همچنین دامنه کاربرد عملگرهای تعمیم را در محدوده مورد نظر مقیاس ها تجزیه و تحلیل می کنند. آنها محدودیت های کاربردی را بررسی کردند، جایی که “رژیم” اپراتور تغییر می کند. با این حال، آنها بازنمایی را تابعی پیوسته از مقیاس در نظر می گیرند که با رویکرد ما مشابهت دارد.
Brewer 2007 و Touya 2013 ابزار جالبی به نام ScaleMaster را توصیف می کنند که از تعمیم خودکار چند مقیاسی پشتیبانی می کند [ 20 ، 21 ]. این مبتنی بر مدلی است که نحوه تعمیم ویژگی های نقشه از مجموعه داده های مختلف را از طریق طیف وسیعی از مقیاس های هدفمند رسمی می کند. علیرغم این واقعیت که این ابزار بر تولید یک راه حل چند مقیاسی/چند نمایشی تمرکز دارد، ایده تعریف اقدامات تعمیم برای طیف وسیعی از مقیاس های نقشه مشابه رویکرد ما است.
نولنبرگ و همکاران مثال های جالبی از انتقال صاف برای ویژگی های خطی بین نمایش آنها در دو مقیاس [ 22 ] ارائه دهید. به جای ساده سازی خط، بر درونیابی بین دو مقیاس تمرکز می کند. حتی این واقعیت که بیشتر شبیه به شکلگیری در گرافیک کامپیوتری (انیمیشن) است تا تعمیم نقشه (در مورد ما محتوای صاف تولید میکند)، همچنان مثال خوبی از نمایش در مقیاسهای چندگانه است.
چیمانی و همکاران روشی را اعمال می کنند که در آن لبه های نقشه شبکه جاده ها را یکی یکی حذف می کنند. بنابراین، نقشه ساده تر و ساده تر می شود [ 6]. تقریباً تعداد نامحدودی از سفارشات احتمالی وجود دارد که در آنها می توان لبه ها را حذف کرد. بنابراین، آنها سعی می کنند با حفظ اتصال گراف، دنباله ای از حذف لبه ها را تعریف کنند که بر اساس برخی شرایط بهترین نتیجه را می دهد. بهترین نقشه ساده شده نقشه با حداقل تغییر در اتصال است. این روش تلاش میکند تا مجموع همه تفاوتها را برای نقشههای سادهشده منفرد، شبیه به اصل تنظیم کمترین مربع، که در آن مجموع حداقل شده همه تغییرات، راهحل بهینه است، به حداقل برساند. برای محاسبه همه جایگشت های ممکن، از برنامه ریزی خطی استفاده کردند. این راه حل بهینه به عنوان یک معیار به عنوان بهترین مرجع کیفیت مورد استفاده قرار گرفت. سپس دو الگوریتم بهینهسازی اکتشافی جدید توسعه دادند و آنها را با راهحل برنامهنویسی خطی معیار مقایسه کردند. آنها مقایسه کردند که دو الگوریتم مختلف چقدر به معیار نزدیک شده اند. این یکی از اولین مقالاتی است که در طول تعمیم مداوم بر معیارهای جهانی تمرکز کرده است. با این حال، کیفیت تعمیم هنوز مشکل ساز است. این نشان می دهد که اتصال نه تنها یک معیار کافی برای یک نقشه خوب است و تمام جنبه های ضروری تعمیم شبکه راه را پوشش نمی دهد. آنها با این مشکل مواجه شدند که بخش جاده ای از یک ضربه مهم ممکن است از بین برود یا اینکه بخشی از شبکه همیشه به خوبی وسعت نقشه را در بر نمی گیرد و بخش های بزرگی از نقشه خالی می ماند. علاوه بر این، تصور کلی از نقشه، که در آن مناطق بزرگ روستایی و شهری کوچک هنوز باید در مرحله بعدی تعمیم قابل تشخیص باشند، هنوز یک مسئله است. این یکی از اولین مقالاتی است که در طول تعمیم مداوم بر معیارهای جهانی تمرکز کرده است. با این حال، کیفیت تعمیم هنوز مشکل ساز است. این نشان می دهد که اتصال نه تنها یک معیار کافی برای یک نقشه خوب است و تمام جنبه های ضروری تعمیم شبکه راه را پوشش نمی دهد. آنها با این مشکل مواجه شدند که بخش جاده ای از یک ضربه مهم ممکن است از بین برود یا اینکه بخشی از شبکه همیشه به خوبی وسعت نقشه را در بر نمی گیرد و بخش های بزرگی از نقشه خالی می ماند. علاوه بر این، تصور کلی از نقشه، که در آن مناطق بزرگ روستایی و شهری کوچک هنوز باید در مرحله بعدی تعمیم قابل تشخیص باشند، هنوز یک مسئله است. این یکی از اولین مقالاتی است که در طول تعمیم مداوم بر معیارهای جهانی تمرکز کرده است. با این حال، کیفیت تعمیم هنوز مشکل ساز است. این نشان می دهد که اتصال نه تنها یک معیار کافی برای یک نقشه خوب است و تمام جنبه های ضروری تعمیم شبکه راه را پوشش نمی دهد. آنها با این مشکل مواجه شدند که بخش جاده ای از یک ضربه مهم ممکن است از بین برود یا اینکه بخشی از شبکه همیشه به خوبی وسعت نقشه را در بر نمی گیرد و بخش های بزرگی از نقشه خالی می ماند. علاوه بر این، تصور کلی از نقشه، که در آن مناطق بزرگ روستایی و شهری کوچک هنوز باید در مرحله بعدی تعمیم قابل تشخیص باشند، هنوز یک مسئله است. این نشان می دهد که اتصال نه تنها یک معیار کافی برای یک نقشه خوب است و تمام جنبه های ضروری تعمیم شبکه راه را پوشش نمی دهد. آنها با این مشکل مواجه شدند که بخش جاده ای از یک ضربه مهم ممکن است از بین برود یا اینکه بخشی از شبکه همیشه به خوبی وسعت نقشه را در بر نمی گیرد و بخش های بزرگی از نقشه خالی می ماند. علاوه بر این، تصور کلی از نقشه، که در آن مناطق بزرگ روستایی و شهری کوچک هنوز باید در مرحله بعدی تعمیم قابل تشخیص باشند، هنوز یک مسئله است. این نشان می دهد که اتصال نه تنها یک معیار کافی برای یک نقشه خوب است و تمام جنبه های ضروری تعمیم شبکه راه را پوشش نمی دهد. آنها با این مشکل مواجه شدند که بخش جاده ای از یک ضربه مهم ممکن است از بین برود یا اینکه بخشی از شبکه همیشه به خوبی وسعت نقشه را در بر نمی گیرد و بخش های بزرگی از نقشه خالی می ماند. علاوه بر این، تصور کلی از نقشه، که در آن مناطق بزرگ روستایی و شهری کوچک هنوز باید در مرحله بعدی تعمیم قابل تشخیص باشند، هنوز یک مسئله است.
راه حل واقعا مستمر دیگری توسط لی و ژو پیشنهاد شده است، از جمله آزمایش با داده های واقعی و ارزیابی گسترده [ 15]]. آنها هر دو رویکرد را مقایسه می کنند. سکته مغزی و تراکم مش و ترکیب آنها در روش به اصطلاح یکپارچه خود برای ایجاد یک راه حل جهانی برای شبکه جاده با استفاده از مزایای هر دو روش. راه حل آنها دو سلسله مراتب خطی و منطقه ای مجزا ایجاد می کند. آنها آنها را با هم ترکیب می کنند تا نمایش های چند مقیاسی پیوسته از یک شبکه جاده را ارائه دهند. این راه حل نسبتاً پیچیده مبتنی بر حذف ویژگی ها است، با تجزیه و تحلیل آنچه باید حذف شود. این تجزیه و تحلیل تنها در ابتدای فرآیند انجام می شود. تغییر پارامترهای فرآیند تعمیم در نظر گرفته نمی شود. به عنوان مثال، قوانین/پارامترهایی که در طول مراحل مختلف تعمیم اقتباس شده اند. از سوی دیگر، تست عملکرد واقعا امیدوارکننده به نظر می رسد و نشان می دهد که این رویکرد کاملاً امکان پذیر است و برای استفاده در حین پرواز خوب خواهد بود.
رویکرد ما از یک ساختار داده در مقیاس متنوع استفاده میکند که نتایج اقدامات تعمیم نقشه را ذخیره میکند. ویژگیها در مراحل کوچک تعمیم مییابند و به تدریج منجر به نقشههای سادهتر و سادهتر میشوند. این فرآیند مبتنی بر پردازش مکرر کم اهمیت ترین ویژگی، بر اساس یک معیار جهانی است. ما فرض می کنیم که اشیاء را می توان با الگوریتم های بهینه و تنظیمات پارامتر مناسب برای استفاده در هر مقیاس نقشه به خوبی تعمیم داد. نمایشهای میانی اشیاء را میتوان با دنبالهای از عملیات تعمیم تعریف کرد که اشیاء کوچک و کماهمیت را حذف میکنند تا محدودیت نمایش را برآورده کنند، در حالی که مرزهای این اشیاء را ساده میکنند. ساختار داده در مقیاس متغیر، معروف به tGAP (پارتیشن منطقه تعمیم یافته توپولوژیکی)، که در [ 8] پیشنهاد شده است.، 9 ]، این تغییرات افزایشی را با حداقل افزونگی ثبت می کند. هم اشیای تفصیلی در بزرگترین مقیاس و هم اشیای میانی تولید شده در طی فرآیند تعمیم در مجموعه ای از جداول پایگاه داده تا تعمیم ترین نمایش برای کوچکترین مقیاس ذخیره می شوند. ارزش اضافی مفهوم مقیاس متغیر در مقایسه با رویکردهای چند مقیاسی در جنبه های زیر نهفته است:
-
ذخیره سازی اضافی تا حد امکان با اجتناب از تکرار ویژگی ها (مانند چند مقیاسی) و ذخیره مرزهای مشترک بین مناطق همسایه به جای خود چند ضلعی های صریح حذف می شود، یعنی با استفاده از یک ساختار داده توپولوژیکی متشکل از گره ها، لبه ها و وجه ها.
-
نمایشهای میانی بیشتری را میتوان ساخت، زیرا فرآیند تعمیم خودکار، دامنه معتبر مقیاسهای نقشه را که این عنصر باید نشان داده شود، برای هر نقطه اولیه توپولوژیکی (گره، لبه یا چهره) ثبت میکند. این می تواند برای پاسخگویی به تقاضای فزاینده کاربران برای نقشه های اضافی در مقیاس های متوسط استفاده شود [ 23 ].
-
اصل و نسب مراحل تعمیم به صراحت ذخیره می شود و دلالت بر پیوند بین اشیاء تعمیم یافته و اصلی دارد. به دست آوردن این پیوندها برای پایگاه های داده چند مقیاسی کار بسیار دشواری تلقی می شود. مزیت اصلی این به روز رسانی های آینده ویژگی ها بدون تولید مجدد مجموعه داده است.
در این چشم انداز، ما رویکرد مقیاس متغیر را به عنوان تولید دنباله ای از نقشه های متوالی تعمیم یافته در نظر می گیریم، به طوری که این نقشه ها به خوبی با هم مطابقت دارند، مشابه [ 6 ]. به جای اینکه هر سطح از تعمیم را مستقل در نظر بگیرید. از دیدگاه ما، توالی مراحل تعمیم ارزشمندتر از نقشه نهایی مقیاس مشخص شده است. روش ما هیچ کران پایینی و/یا بالایی صریح با توجه به محدوده مقیاسی که هدف قرار میدهیم ندارد. این روش را بسیار عمومی می کند.
علاوه بر این، اصل ساختار tGAP میتواند منجر به تعامل نرمتر کاربر هنگام بزرگنمایی و پاننگ شود [ 24 ، 25 ]. همچنین می توان یک نمایش سه بعدی صریح از ویژگی های دو بعدی ایجاد کرد که در آن مقیاس به عنوان بعد سوم ادغام شده است. این امکان را به یک ویژگی دنیای واقعی می دهد تا یک نمایش پایگاه داده واحد داشته باشد، برخلاف رویکردهای مقیاس گسسته، که نه تنها نمایش های متفاوتی دارند، بلکه اغلب به طور جداگانه نگهداری می شوند.
در گذشته نه چندان دور، ما ابتدا روی جادهها در مقیاسهای کوچکتر [ 26 ] تمرکز کردیم، جایی که اشیاء جاده فقط با خطوط نشان داده میشدند، و بر حفظ اتصال شبکه تأکید کردیم. بعداً، ما بر ویژگیهای شبکه جادهای در مقیاسهای بزرگتر تمرکز کردیم [ 27 ]، اما این تحقیقات به مفاهیم نظری محدود شد. این مقاله هر دو فاز را در یک فرآیند خودکار قرار می دهد که در آن هر دو رویکرد به طور یکپارچه یکپارچه شده اند. با مشکلات یکپارچه سازی، طراحی یک الگوریتم و تنظیم قوانین تعمیم برای حفظ اتصال جاده ها سروکار دارد. چالش اصلی همچنان باقی است. تعمیم باید در مراحل کوچک انجام شود. بعداً روش توسعه یافته را با داده های واقعی آزمایش می کند.
3. ساختارهای داده و استراتژی پردازش
این بخش استراتژی پردازش پیشنهادی ما را برای تعمیم شبکه جاده معرفی می کند ( بخش 3.3 ). قبل از انجام این کار، ابتدا اصطلاحات را در بخش 3.1 و بخش 3.2 معرفی می کند تا بتواند استراتژی ما را بهتر توضیح دهد.
3.1. دانه دانه بودن
تعمیم مستمر نیازمند تغییرات هندسی (بزرگ یا کوچک) بین مراحل تعمیم در فرآیند است. مقدار تغییر ویژگی ها (داده ها) در یک مرحله تعمیم را دانه بندی می نامیم [ 27 ]، و سطوح زیر را متمایز می کنیم:
-
جزئیات دوره، زمانی که همه ویژگی ها به طور همزمان درگیر شوند، به عنوان مثال، همه جاده ها حذف می شوند.
-
دانه بندی متوسط، زمانی که تمام ویژگی های یک کلاس یا زیر کلاس خاص پردازش می شوند، به عنوان مثال، تمام جاده های محلی با محدودیت سرعت حذف می شوند.
-
هنگامی که یک ویژگی واحد پردازش می شود، به عنوان مثال، یک جاده بن بست حذف می شود، دانه بندی خوب است.
-
بهترین دانه بندی، زمانی که بخشی از یک ویژگی درگیر باشد، به عنوان مثال، یک بخش جاده حذف می شود.
از آنجایی که هدف ما یک انتقال تدریجیتر بدون تغییرات قابلتوجه در هندسه است، تغییرات باید کوچک باشد. در مورد ما، بهترین دانه بندی بهینه است. این تضمین می کند که تغییرات تا حد امکان کوچک هستند و به خوبی با مفهوم مقیاس متغیر هماهنگ هستند.
ما عملیات ادغام/حذف، فروپاشی/ تقسیم و سادهسازی را برای این بخشهای شی اعمال میکنیم، که میتواند منجر به یک شی جاده متشکل از بخشهایی شود که با خطوط و چهرههای مختلط نشان داده شدهاند. شکل 2 را ببینید. از دیدگاه کارتوگرافی سنتی این ممکن است کمتر مطلوب به نظر برسد، اما از دیدگاه مقیاس متنوع، مطلوب است. تفاوت در نمایش را می توان در تجسم با اعمال یک ظاهر طراحی مناسب جبران کرد، زمانی که بخش خط با خطوطی با ضخامت یکسان برابر با عرض بخش ناحیه مجاور نشان داده می شود. علاوه بر این، این واقعیت که فرآیند تعمیم در مراحل کوچک انجام می شود منجر به مشکلات ساده تری می شود که محاسبه یا پیاده سازی آن آسان تر است. علاوه بر آن، تاریخچه مراحل به صراحت ذخیره می شود، و این نشان می دهد که پیوندهای بین اشیاء تعمیم یافته و اصلی وجود دارد. اغلب، این پیوندها در پیاده سازی های چند مقیاسی وجود ندارند.
3.2. سطح انتزاع
مجموعه داده های ورودی که در حال حاضر در ساختار tGAP پشتیبانی می شوند، به عنوان یک نقشه چند ضلعی دو بعدی، یعنی به عنوان یک پارتیشن از صفحه در مفهوم هندسی، بدون شکاف و همپوشانی مدل می شوند. در نتیجه، ساختار داده فقط شامل موارد اولیه توپولوژیکی است. گرهها، لبهها و وجهها، جایی که یک شی ناحیه در نقشه تنها با یک وجه توپولوژیکی مطابقت دارد. همین امر برای جادهها در مجموعه داده ورودی صادق است، آنها فقط با چهرهها (مناطق) نشان داده میشوند.
علاوه بر طبقه بندی و تقسیم منطقه مسطح، اطلاعات/اطلاعات معنایی بیشتری به طور ضمنی در نقشه ورودی در مقیاس بزرگ وجود دارد، مانند شبکه های خطی (زیرساخت جاده یا رودخانه ها و کانال های آب). این شبکه های خطی به طور ضمنی در داده های ورودی هستند. ما می خواهیم معنای طبیعی آنها را در نقشه هدف در کوچکترین مقیاس نیز حفظ کنیم. اگرچه این ویژگیها بخشی از یک شبکه هستند، اما اغلب به طور صریح مدلسازی نمیشوند. بنابراین، ما اطلاعات ضمنی در مورد نقشی که ویژگیهای درون شبکه ایفا میکند را واضح میسازیم، حتی زمانی که به عنوان ورودی داده نشده باشد.
شکل 3 یک مثال ساده از چنین شبکه ای را در ورودی (مقیاس بزرگ) (به شکل 3 a) و در مقیاس کوچک هدف (نگاه کنید به شکل 3 د) نشان می دهد. شبکه راه را می توان به راحتی از هر دو شکل استخراج کرد. هنگامی که دو بخش جاده هر دو توسط مناطق (مقیاس بزرگ) نشان داده می شوند، زمانی که آنها یک لبه مشترک دارند تصادف می کنند. در جایی که حداقل یکی از بخشهای جاده با یک منطقه نشان داده نمیشود، زمانی که آنها حداقل یک نقطه (گره) را به اشتراک میگذارند حادثه هستند. با این حال، پیگیری شبکه خطی چندان ساده نیست زیرا نقشه از مقیاسی به مقیاس دیگر به روشی تدریجی تغییر می کند. مراحل میانی را در شکل 3 ب، ج ببینید. بنابراین، همین وضعیت در شکل 4 نشان داده شده استاما این بار نمودار خطی شبکه راه ها برای درک بهتر روابط بین اشیاء جاده به تصویر کشیده شده است. همانطور که گفته شد، بخش های جاده می توانند با سایر بخش های جاده برخورد کنند. بسته به تعداد وقوع، یک بخش جاده نقش اتصال (گره) یا اتصال (لبه) را در نمودار شبکه خطی ایفا می کند. از شکل 3 a-d، میتوانیم ببینیم که جاسازی هندسی اشیاء در نقشه به تدریج تغییر میکند، در حالی که نمودار شبکه خطی مفهومی ثابت میماند. این به ما یک ابزار مؤثر برای تعمیم معنیدار شبکه جادهای در سراسر مقیاس میدهد.
به خاطر داشته باشید که در توضیحات زیر، بخش های جاده با ابعاد مختلف می توانند در تعامل با یکدیگر باشند، به عنوان مثال، یک خط 1 بعدی می تواند در تعامل با یک بخش جاده منطقه دو بعدی باشد. بنابراین، بخشهای جاده را میتوان (بهویژه در مقیاسهای تغییر تدریجی) بر اساس تعداد سایر بخشهای جاده تصادفی طبقهبندی کرد و در ساختار دادهها به شرح زیر گنجانده شد:
-
یک بخش جاده زمانی به عنوان بخش ایزوله طبقه بندی می شود که هیچ حادثه دیگری در بخش جاده نداشته باشد.
-
یک بخش جاده در صورتی که دقیقاً یک حادثه جاده دیگر داشته باشد به عنوان بن بست طبقه بندی می شود. در ساختار داده توپولوژیکی یا با صورت یا لبه نشان داده می شود.
-
یک قطعه جاده زمانی به عنوان اتصال جاده ای شبکه طبقه بندی می شود که دقیقاً با دو بخش جاده دیگر برخورد کند. این یا با صورت یا با لبه در ساختار داده نشان داده می شود.
-
یک بخش جاده زمانی که به بیش از دو بخش جاده دیگر برخورد کند به عنوان محل اتصال جاده شبکه طبقه بندی می شود. یا توسط یک چهره یا یک گره در ساختار داده نشان داده می شود.
به این ترتیب، ما می توانیم هر ویژگی انتخاب شده در نقشه را در هر مرحله از فرآیند مرتبط کنیم. فرض مربوط به داده های ورودی این است که اتصالات و اتصالات یک شبکه جاده به خوبی در مجموعه داده ورودی تعریف شده است. شکل 5 الف را ببینید . با این حال، زمانی که داده های ورودی با این فرض مطابقت ندارند (به مثال شکل 5 ب مراجعه کنید)، یک مرحله پیش پردازش اضافی باید انجام شود. این را می توان با اعمال مثلث دلونای محدود برای به دست آوردن بخش های جاده منطقه ای طبقه بندی شده مناسب (اتصال یا اتصال) انجام داد، همانطور که توسط Uitermark و همکاران پیشنهاد شده است. [ 28 ].
3.3. استراتژی برای یک مرحله تعمیم
فرآیند تعمیم برای تولید محتوا برای ساختار داده در مقیاس متغیر بر اساس اصل tGAP (یافتن کمترین اهمیت شی و ادغام آن با سازگارترین همسایه) است که با استفاده از دانش شبکه خطی گسترش یافته است. توجه داشته باشید که اصل به روشی بسیار عمومی طراحی شده است، به طوری که امکان ترکیب عملیات تعمیم مختلف وجود دارد. همچنین یکپارچه است به این معنا که تمام ویژگیهایی که عملیات برای آنها انجام میشود با هم بررسی میشوند (همه ویژگیها از نظر هندسی در یک پارتیشن مسطح مسطح یکپارچه هستند که به عنوان ورودی استفاده میشود). تصمیمات طراحی زیادی در توسعه این فرآیند وجود دارد، و ما آنها را به عنوان تصمیم طراحی i (با iیک شماره دنباله ای). اغلب، چندین گزینه جایگزین وجود دارد، اما بر اساس تجربه و برخی آزمایشهای محدود، «بهترین حدسهای» اولیه خود را برای این تصمیمها ارائه میکنیم.
تصمیم طراحی 1:ما در ایجاد محتوای مقیاس متنوع برای ساختار داده فقط سه دسته از اشیاء را متمایز می کنیم: جاده ها (زیر طبقه بندی شده به عنوان اتصال یا اتصال)، آب و اشیاء دیگر. این باعث می شود تعداد انواع شی در طول ایجاد مقیاس متغیر به سه کاهش یابد، که تصمیمات را شفاف تر می کند. علاوه بر پردازش شبکه جادهای، این به ما امکان میدهد تا آب را متفاوت از سایر کلاسهای غیر جادهای رفتار کنیم. توجه داشته باشید که طبقه بندی اصلی سایر کلاس ها حفظ شده و بعداً در تجسم استفاده می شود (اما نه در طول ایجاد ساختار مقیاس متغیر). در اینجا میتوان تصمیمهای جایگزین طراحی پردازش را اتخاذ کرد: فقط دو کلاس (جاده، دیگر: حتی سادهتر)، سه کلاس (همان، اما تصفیهشدهتر، با دو طبقه فرعی برای آب: اتصال، اتصال)،
در ابتدای فرآیند، هر چهره در سازه بر اساس نوع و اندازه (مساحت) ویژگی، یک مقدار اهمیت دریافت می کند (در نقشه اولیه مقیاس بزرگ، فقط ویژگی های منطقه وجود دارد). توجه داشته باشید که محاسبه مقدار اهمیت را می توان اصلاح کرد. بخش 5 را ببینید . بر اساس مقدار اهمیت برای هر چهره، فرآیند شروع به انتخاب چهره پس از دیگری می کند و اقدامات خاصی را بر اساس نوع چهره انتخاب شده انجام می دهد. چهره با کمترین مقدار اهمیت ابتدا پردازش می شود ( تصمیم طراحی 2:همانطور که در ساختار داده یکپارچه، هر دو نمایش منطقه و خط جاده ها (و سایر ویژگی ها) امکان پذیر است. یک جایگزین برای داشتن چهره های فقط در صف اهمیت، داشتن ویژگی های خط یا گره در صف اهمیت است.) بسته به نوع چهره، گزینه های پردازش زیر وجود دارد. شکل 6 را ببینید .
-
چهره انتخاب شده یک تقاطع جاده است و یا با تقاطع جاده مجاور ادغام می شود یا تا زمانی که همه اتصالات جاده مجاور از بین برود حفظ می شود. اگر چنین است، پس خود صورت نیز می تواند جمع شود. در غیر این صورت، اهمیت افزایش می یابد و چهره دوباره در صف قرار می گیرد (و بعداً پردازش می شود) ( تصمیم طراحی 3: به جای به تعویق انداختن پردازش اتصال، می توان مستقیماً آن را به یک گره فرو برد ( حتی اگر همه اتصالات حادثه از بین نرود)).
-
چهره انتخاب شده یک اتصال جاده ای است و با اتصال جاده مجاور ادغام می شود. اگر چنین چهره ای وجود نداشته باشد، به یک خط فرو می رود.
-
صورت انتخابی آب است و با یک وجه آبی مجاور دیگر ادغام خواهد شد. اگر چنین چهره ای وجود نداشته باشد، به یک خط فرو می رود.
-
صورت انتخاب شده شی دیگر است و در صورت وجود، با یک شی مجاور دیگر ادغام می شود. در غیر این صورت، صورت فرو میرود ( تصمیم طراحی 4:اگر هیچ صورت مجاور دیگری از نوع دیگر وجود نداشته باشد، یک تصمیم جایگزین طراحی به جای فروپاشی، افزایش اهمیت و قرار دادن آن در صف خواهد بود. بعداً، هنگامی که یک (یا چند) از وجهه های جاده همسایه به یک خط جمع شد، ممکن است وجه انتخاب شده دارای یک وجه دیگر مجاور باشد. سایر اشیاء مجاور بدون جاده فروریخته که بین آنها قرار دارند، بهینه ترین موارد برای ادغام هستند. اگر چنین گزینه مجاوری وجود نداشته باشد، شی دیگری با کمترین اهمیت جاده فرو ریخته (لبه) بین انتخاب می شود. هنگامی که جاده فروریخته بین آن قرار می گیرد، چهره ها ادغام می شوند (و جاده فرو ریخته حذف می شود).
این دستور العمل تعمیم جاده ها را به روشی معنی دار تضمین می کند و برای تمام چهره های ساختار پیوسته است. به طور کلی در مورد جاده ها موارد زیر اتفاق می افتد: ابتدا بخش های جاده منطقه فرو می ریزد و بعداً ادغام مناطق دیگر با یکدیگر انجام می شود. ناحیه دیگر به کدام همسایه ادغام می شود به لبه بین آن بستگی دارد. اگر هیچ بخش جاده ای فروریخته (خط) در بین آن وجود نداشته باشد، این اولویت دارد. اگر همه یالها نشان دهنده بخشهای فروریخته جاده باشند، کماهمیتترین آن انتخاب میشود و این تصمیم میگیرد که با کدام ناحیه همسایه باید ادغام شود. با این نوع ادغام، بخشهای خطی جادهای بیاهمیت بهطور خودکار حذف میشوند.
مهم است که کم اهمیت ترین جاده فروریخته (خط) با بررسی طبقه بندی آن، پیکربندی محلی (اتصال) و طول آن تعیین شود. به طور خاص، برای هر جاده بالقوه فروریخته، ابتدا به طبقه بندی آن نگاه می کنیم. اگر این یک “برنده” به دست آورد، ما این جاده را به عنوان کم اهمیت ترین جاده فروریخته انتخاب می کنیم. اگر این منجر به یک تساوی شود (جادههای فروریخته دارای طبقهبندی یکسان)، برای هر جاده فروریخته یک مقدار اتصال محاسبه میکنیم. مقدار اتصال برای یک جاده با تعداد مسیرهای بین جاده های دیگر از طریق این جاده تعریف می شود که مسیرهای عبور بیشتر به معنای اتصال بالاتر است. کم اهمیت ترین جاده فروریخته جاده ای است که کمترین ارزش اتصال را دارد. به عنوان آخرین راه حل، در مورد جاده هایی که ارزش اتصال یکسانی دارند، کوتاه ترین راه از بین راه های فروریخته به عنوان کم اهمیت ترین راه انتخاب می شود. توضیحات عمیق در [26 ]، جایی که این به طور گسترده آزمایش شده است.
توجه داشته باشید که یک منطقه دیگر (غیر جاده ای) فرو می ریزد اگر و فقط در صورتی که کاملاً توسط مناطق جاده احاطه شده باشد، به عنوان مثال، یک سطح چمن بین دو وجه جاده (نوار چمن بین خطوط یک بزرگراه) باشد. این یک مورد نادر است که در آن سقوط یک ویژگی غیر جاده ای مطلوب ترین است. گزینه دیگر این است که نمای غیر جاده ای را به صف برگردانید و منتظر بمانید تا حداقل یکی از جاده های نزدیک فرو بریزد (همانطور که در تصمیم طراحی 4 نشان داده شده است). با این حال، عملیات فروریزی در این مورد ترجیح داده می شود، زیرا تخصیص قطعات این چهره بی اهمیت به وجوه جاده های مجاور منطقی است و باعث کاهش یک وجهی می شود.
تصمیم طراحی 5: در ابتدای این بخش، اتصالات جاده و اتصالات جاده را تعریف کردیم. در طول فرآیند تعمیم، پیکربندی تغییر میکند، که دو گزینه را ارائه میدهد: (1) چهرهها طبقهبندی اصلی جاده (تقاطع/اتصال) خود را حفظ میکنند، حتی اگر با تعاریف ما در تضاد باشد. یا (2) چهره ها در صورت نیاز مجدداً طبقه بندی می شوند تا با تعاریف ما برای اتصالات و اتصالات سازگار باقی بمانند. ما گزینه اول را انتخاب می کنیم، زیرا با توجه به بازرسی بصری ما، کیفیت کارتوگرافی در مقیاس متغیر کمی بهتر است. رجوع کنید به بخش 4.3 .
تعمیم تکراری توصیف شده در بالا در مراحل انجام می شود. به طور معمول، بعد از هر مرحله یک چهره کمتر می شود و تعداد چهره ها هرگز افزایش نمی یابد. زمانی که یک منطقه تقاطع جاده هنوز یک منطقه اتصال جاده به عنوان همسایه دارد، مقداری تأخیر وجود دارد که باعث می شود پردازش این تقاطع به تعویق بیفتد. با این حال، مناطق اتصال جادهای همجوار، همه در یک لحظه از فرآیند به خطوط تبدیل میشوند و پس از آن، پردازش با تأخیر در مناطق اتصال جادهها نیز میتواند انجام شود. این ثابت می کند که الگوریتم ما وارد یک حلقه بی نهایت نخواهد شد.
4. نتایج
این بخش به کیفیت نقشه برداری ( بخش 4.1 )، تجزیه و تحلیل کمی انجام شده ( بخش 4.2 ) و موارد بحث اضافی ( بخش 4.3 ) می پردازد.
4.1. کیفیت کارتوگرافی
برای آزمایشهای خود، زیرمجموعهای از نقشه توپوگرافی هلندی (TOP10NL) را که برای استفاده در 1:10000 در نظر گرفته شده بود بارگیری کردیم. از دو منطقه زیر استفاده شد:
-
یک منطقه روستایی به مساحت 7 کیلومتر × 7 کیلومتر با 11300 وجه به عنوان ورودی. شکل 7 و شکل 8 را ببینید .
-
مرکز شهر (شهر لیدن). این منطقه 1 کیلومتر × 1 کیلومتر با 19400 وجه به عنوان ورودی است. شکل 9 را ببینید .
این مجموعه داده ها به صورت چند ضلعی های ساده ارائه می شوند، جایی که لایه های شبکه زمین، آب و جاده با هم یک پارتیشن مسطح کامل را تشکیل می دهند. بخش های جاده در مجموعه داده با هندسه برای اتصالات و اتصالات جاده وجود دارد. لایه ساختمان ها در بالای آن لایه ها قرار دارد. ابتدا، تمام لایه های داده را با هم ترکیب کردیم و یک پارتیشن مسطح به عنوان ورودی ایجاد کردیم که با کمک موتور دستکاری ویژگی (FME) آن را به ساختار داده توپولوژیکی تبدیل کردیم. در این مرحله، تمام اجسام با هندسه های ناحیه ای نمایش داده می شوند. سپس، این ورودی با کمک عملیات تعمیم ادغام/حذف و تف/ فروپاشی [ 29 ] به ساختاری در مقیاس متغیر پردازش میشود. ساده سازی خط می تواند در این فرآیند گنجانده شود. شکل 10 را ببینیدج، د. با این حال، در این مرحله از فرآیند تحقیق، برای مشاهده هندسه ویژگی ها بدون هیچ گونه تأثیر اضافی، چنین نیست.
شکل 7 تاثیر روش ما بر داده های واقعی را نشان می دهد. این نشان می دهد که با انجام مراحل تعمیم کوچک، به تدریج نقشه ساده تری به دست آوردیم. در مقیاس های متوسط دو نمایش برای اشیاء جاده (مناطق و خطوط) مخلوط می شوند.
شکل 8 دنباله ای از نقشه ها را برای بخش کوچکی از منطقه روستایی نشان می دهد که از ساختار tGAP که توسط الگوریتم ما ایجاد شده است، بازیابی شده است. نتیجه الگوریتم (محتوای مقیاس متغیر) را نشان میدهد، اما با برداشت صحیح کاربر مطابقت ندارد زیرا مقیاس در این شکل ثابت است و استفاده از نقشه در مقیاس متغیر باید یک تجربه تعاملی در طول بزرگنمایی باشد. حداقل تصوری از محتوای مقیاس های مختلف نقشه می دهد. شکل 9 یک توالی نقشه با اندازه مجدد متناسب را نشان می دهد تا تصور بهتری از نحوه درک کاربر از نقشه های مشتق شده ایجاد کند.
شکل 10 وضعیت دقیق یک دوربرگردان ساده را نشان می دهد. توجه داشته باشید که این نوع از اشیاء زیرساخت به عنوان موجودیتهای مجزا وجود ندارند و به این ترتیب طبقهبندی نمیشوند. بخش های جاده آنها به صورت جداگانه بررسی می شود.
4.2. آنالیز کمی
با توجه به ماهیت تصاویر بر روی کاغذ، تنها مقیاسهای میانی نقشه را میتوان نشان داد. هدف این است که از داده های مقیاس متغیر در ترکیب با عملیات زوم و حرکت متحرک روی نقشه استفاده شود. با این حال، تنها چند معیار موجود برای ارزیابی تعمیم نقشه پیوسته به طور کلی وجود دارد. بنابراین، ما از بازرسی بصری استفاده کردیم و نتایج خود را با پیشرفتهای قبلی مقایسه کردیم. برای ارائه یک مفهوم کمی بهتر از فرآیند، ما همچنین برخی نمودارها را تولید کردیم که بینش بهتری را در مورد کل فرآیند تعمیم ارائه می دهند.
ابتدا، شکل 11 نسبت کلاس های ویژگی را در طول فرآیند تعمیم نشان می دهد. برای هر مرحله تعمیم، شمارش می کنیم که چند شی در ساختار tGAP برای یک کلاس ویژگی خاص وجود دارد. سپس، آن کلاسهای ویژگی به کلاسهای فوقالعاده «آب»، «زمین»، «ساختمانها»، «جادهها» و «سایر» گروهبندی میشوند. این نمودار مطابق با مثالی است که در شکل 8 نشان داده شده است . به طور مشابه، شکل 12 منطقه ای را که این اشیاء در ساختار می پوشانند نشان می دهد. توجه داشته باشید که جاده فروریخته مساحتی ندارد (حتی اگر هنوز یک شی نقشه باشد) و آن که در مساحت جاده ها اندازه گیری می شود سهم کمتری نسبت به زمانی که به طور متناسب بیان می شود (٪) دارد. نزدیک به انتهای نمودار در شکل 12، اشیاء جاده هیچ منطقه ای را اشغال نمی کنند، در حالی که هنوز بخش های خط جاده وجود دارد. بدنه های آبی کوچک هستند و تنها بخش کوچکی از مجموعه داده را اشغال می کنند. بنابراین، آنها در این فرآیند مدت زیادی زنده نمی مانند.
دوم، شکل 13 و شکل 14 نشانه دیگری از همان مثال را از شکل 8 ارائه می دهند . با استایل و طرح رنگی مناسب، مشخص نیست که کدام جاده ها هنوز منطقه هستند و کدامیک قبلا فرو ریخته اند. بنابراین، این نمودارها اعداد مطلق اشیاء جاده را نشان می دهند. شکل 13 فقط اشیاء جاده ها را نشان می دهد که توسط مناطق نشان داده شده اند. شکل 14 تعداد لبه های سازه را نشان می دهد (نماینده اشیاء فروریخته جاده). این نشان می دهد که این فرآیند ابتدا اکثر مناطق جاده را فرو می ریزد (ایجاد خطوط جاده ای جدید). در قسمت b خطوط جاده بین دو وجه ادغام شده حذف شده است. این با فرآیند طراحی شده ما مطابقت دارد.
نمودارهای ارائه شده تا کنون فقط تغییرات مقدار کمی را نشان داده اند (مشتق دوم). این یک فرآیند تدریجی را نشان می دهد که با هدف ما که قبلا ارائه شد مطابقت دارد. همچنین نشان می دهد که قوانین تعمیم ما در استراتژی کلی کاملاً معقول بودند.
در نهایت، شکل 15 استفاده از عملگرهای مختلف تعمیم را در طول فرآیند نشان می دهد. دقیقاً یک عملگر در هر مرحله تعمیم اعمال میشود، یا ادغام/حذف یا تقسیم/جمع کردن. نمودار آنچه را که در هر 500 مرحله اتفاق افتاده خلاصه می کند و نسبت بین عملگرها را نشان می دهد. می توان مشاهده کرد که بسیاری از عملیات ادغام/حذف در ابتدا زمانی که چهره های کوچک ادغام می شوند اتفاق می افتد. این چهرهها عمدتاً برشهایی از مرحله پیش پردازش هستند، زمانی که لایههای ساختمانها با لایههای دیگر «ادغام» شدند. از آنجایی که آنها کوچک هستند، اهمیت کمی دارند و ابتدا پردازش می شوند، اما این می تواند یک مرحله پیش پردازش/تمیز کردن اضافی باشد.
بعداً در این فرآیند، اپراتور تقسیم/ فروپاشی غالب تر است زیرا اشیاء جاده پردازش می شوند. در نهایت، اپراتور ادغام مجدداً مهمتر میشود، زیرا بیشتر جادهها فرو میروند، و سپس سایر اشیاء با هم ادغام میشوند و جادههای فروریخته بین آنها حذف میشوند.
4.3. نکات بحث اضافی
نتایج بالا برخی از نتایج نسبتاً خوب را در تعمیم خودکار و پیوسته نقشه نشان داده است. با این حال، هنوز تعداد زیادی تصمیمات طراحی (همانطور که در بالا ذکر شد) و برخی مسائل اضافی وجود دارد که در طول طراحی و اجرا با آنها مواجه شده است. در بیشتر موارد، بهترین راه حل هنوز شناخته نشده است و تحقیقات بیشتری مورد نیاز است. لیست مسائل اضافی شامل موارد زیر است:
4.3.1. طبقه بندی جاده ها
اشیاء جادهای بر اساس تعداد بخشهای جاده تصادفی، که در آن یک تقاطع باید بیش از دو همسایه جاده داشته باشد، به عنوان تقاطع جاده یا اتصال جاده طبقهبندی میشوند. زمانی که این طبقه بندی می تواند انجام شود دو گزینه وجود دارد (تصمیم طراحی 5). در گزینه اول، اشیا در مرحله پیش پردازش طبقه بندی می شوند و سپس از همان دانش در کل فرآیند استفاده می شود. در گزینه دوم، پویاتر، اشیاء در طول فرآیند، در صورت نیاز مجدداً طبقه بندی می شوند.
شکل 16 توالی پردازش را برای هر دو رویکرد نشان می دهد، که از یک پیکربندی اولیه شروع می شود که در آن انسان نوار چمن بین دو جاده را که به صورت موازی حرکت می کنند، تشخیص می دهند. می بینیم که طبقه بندی استاتیک (در بالای شکل) دو اتصال و دو اتصال را در ابتدای فرآیند مشخص می کند. سپس، اتصالات با هم ادغام می شوند و سپس فرو می ریزند. از سوی دیگر، طبقه بندی پویا (در پایین) همه چیز را به عنوان اشیاء اتصال می شناسد (همه اشیا بیش از دو جاده تصادفی دارند). سپس، دو تقاطع جادهای با هم ادغام میشوند و یک طبقهبندی جدید یک اتصال جاده جدید را شناسایی میکند که بعداً از بین میرود. آخرین مرحله ادغام دو تقاطع جاده باقی مانده است.
روند تعمیم ادامه خواهد یافت و پیوند(های) باقی مانده از بین می رود. توجه داشته باشید که برای طبقهبندی دینامیکی این امر بسیار دیرتر اتفاق میافتد زیرا اتصال نهایی بزرگتر است (اهمیت بالاتر) و منجر به هندسه متفاوتی از جادههای فروریخته میشود.
علاوه بر جنبههای فنی، مانند استفاده از حافظه یا پیچیدگی زمانی، یک رویکرد ایستا ممکن است منجر به طبقهبندی نادرست (از اتصالات و اتصالات طبق تعریف ما) در طول فرآیند شود، اما در طول تجسم تصویر کلی نقشهکشی کمی بهتر میدهد. بنابراین در اجرای خود از آن استفاده کردیم.
4.3.2. طبقه بندی مجدد پس از تقسیم / فروپاشی
تصمیم طراحی 6: هنگامی که وجه شی جاده فرو می ریزد، لبه های تازه ایجاد شده باید دارای طبقه بندی صحیح باشند. شکل 17 را ببینید . صورت بر اساس اسکلت سازی به مجموعه ای از لبه ها تبدیل می شود. بیشتر اوقات، یک شاخه “اصلی” با شکل صورت اصلی مطابقت دارد. با این حال، مناسب ترین طبقه بندی مجدد برای لبه های جدید چندان واضح نیست. آیا همه شعب باید یک طبقه بندی دریافت کنند یا فقط شعبه اصلی باید طبقه بندی شود؟
طبقه بندی جدید برای همه لبه ها اتصال خوب را تضمین می کند، زیرا در توپولوژی راحت تر تشخیص داده می شود. پیاده سازی برای پردازش بیشتر ساده تر و واضح تر است. بنابراین، ما از آن در رویکرد خود استفاده کردیم. با این وجود، شبکه اصلی را کمی تغییر شکل می دهد. شبکه در حال “گسترش” است. وسط را در شکل 17 و جزئیات را در شکل 18 ببینید . از طرف دیگر، گزینه دیگر این است که فقط شاخه اصلی شی جمع شده را طبقه بندی کنید. به این ترتیب از گسترش ناخواسته شبکه جاده ها جلوگیری می شود. با این حال، کل شبکه در دامنه بیشتر و بیشتر در طول فرآیند متلاشی می شود و تجزیه و تحلیل اتصال دشوارتر خواهد بود.
4.3.3. عبور از شبکه های متعدد
نقشه ورودی طرحی از فضای سه بعدی به یک نقشه دو بعدی است. این بدان معناست که اطلاعات مربوط به شبکه های خطی که از یکدیگر در سطوح ارتفاعی متعدد عبور می کنند باید به نحوی در نقشه حفظ شود و به ما امکان می دهد از آن دانش در پردازش استفاده کنیم. با این حال، اگر چنین دانشی در دسترس نباشد، چه باید بکنیم؟ به دست آوردن داده ها یک چیز است (به عنوان مثال، اگر در TOP10NL موجود باشد)، اما چگونه می توانیم آن دانش را در طول فرآیند حفظ کنیم، زمانی که اشیا نمایش خود را تغییر می دهند؟ علاوه بر این، اولویت شبکه های فردی چگونه باید تعیین شود؟ یکی دیگر از جنبههای کاملاً واضح، راهحل موردی است که شبکههای مهمتر از یکدیگر عبور میکنند، به عنوان مثال، شبکه جادهای که از رودخانهها و کانالهای آب عبور میکند. در این لحظه واقعاً مشخص نیست که در چنین شرایطی چه باید کرد.
جالب است که به افزایش احتمالی اتصال دو شبکه خطی اشاره کنیم: جاده ها و آب. در مقیاس بزرگتر و با یک طبقهبندی در هر چهره، نمیتوان این واقعیت را مدلسازی کرد که هم شبکه راه و هم شبکه رودخانه به درستی به هم متصل هستند. با این حال، در مقیاسهای کوچکتر، وقتی بخشهای جاده و آب به خطوط و گرهها فرو میروند، هر دو شبکه میتوانند دوباره به هم متصل شوند (و ماهیت هر دو شبکه را بهتر نشان دهند).
5. بحث و کار آینده
تا به حال، روش مقیاس متغیر ما فقط میتوانست برای نشان دادن ویژگیهای منطقه استفاده شود. ما نشان دادهایم که ویژگیهای خط در راهحل فعلی ما در مقیاس متغیر ممکن است معرفی شوند. ما الگوریتمی را طراحی کردهایم که فرآیند تعمیم کاملاً خودکار را ارائه میکند که شبکه جادهای را در تمام مقیاسها حفظ میکند، که نتایج معقولی به دست میدهد. این الگوریتم دانش را در مورد یک شبکه جاده حفظ می کند، حتی در شرایطی که جاده ها تا حدی با خطوط و همچنین تا حدی توسط مناطق نشان داده می شوند. ما اصلاحات لازم را ارائه کردیم که باید برای تطبیق با چنین الگوریتمی اعمال شود و همچنان ایده مراحل تعمیم کوچک را دنبال می کند. برای این، ما شش تصمیم طراحی ارائه کرده ایم. ما همچنین ارائه کردهایم که استفاده از یک پارتیشن مسطح مقیاس بزرگ فقط با اشیاء ناحیه و طبقهبندی آنها به عنوان ورودی کافی است. ما رویکرد خود را روی یک مجموعه داده آزمایشی همراه با برخی اندازهگیریهای کمی تأیید کردهایم. با نتایج تولید شده، اکنون فرصتی برای انجام آزمایش کاربر از اصل مقیاس متغیر داریم. با این حال، هنوز سوالات باز زیر وجود دارد که باید به آنها پرداخته شود:
-
اعتبار سنجی عینی کیفیت کارتوگرافی نتایج دشوار است. مقایسه مستقیم نقشه مقیاس متغیر با راه حل های چند مقیاسی موجود کافی نیست. هر دو رویکرد در اصل متفاوت هستند و واقعاً قابل مقایسه نیستند. بنابراین، آزمایش پذیرش کاربر ممکن است اعتبار اضافی (علاوه بر معیارهای کمی) ارائه دهد.
-
در رویکرد فعلی ما، هر مرحله تعمیم با انتخاب کم اهمیت ترین وجهی که عملیات تعمیم برای آن انجام می شود، شروع می شود. این انتخاب می تواند بهبود یابد. به جای فقط چهره ها (نمایش منطقه ای ویژگی)، همچنین انتخاب لبه ها (نمایش خطی ویژگی ها) باید امکان پذیر باشد. انتخاب اشیاء بر اساس یک تابع اهمیت پیشرفته تر، با استفاده از اندازه، طبقه بندی، پارامتر اتصال، اطلاعات معنایی یا ترافیک می تواند در نظر گرفته شود.
-
گزینه های دیگر تصمیمات مختلف طراحی همانطور که در این مقاله ذکر شد می توانند بیشتر مورد تجزیه و تحلیل قرار گیرند.
-
درمان پیشرفته برای شبکه های آب (همچنین اتصالات و اتصالات)، شبکه های ریلی، ساختمان ها یا سایر انواع ویژگی ها می تواند شامل شود. به خوبی ممکن است در طول فرآیند تعمیم دانش اضافی یا درمان متفاوتی برای این انواع مورد نیاز باشد.
-
می توان از طبقه بندی واقعی سایر انواع ویژگی ها استفاده کرد. این ممکن است عملکردهای بهتر، حساس تر و سازگاری را فعال کند و در نتیجه کارتوگرافی بهتری ایجاد کند.
-
سادهسازی خط در فرآیند تعمیم میتواند برای ایجاد ساختار داده در مقیاس متغیر گنجانده شود.
-
علاوه بر دادههای Top10NL، رویکرد پیشنهادی باید در سایر مجموعههای داده نیز اعمال شود. به عنوان مثال، کورین (مقیاس شروع کوچکتر) یا BGT هلندی (Basisregistratie Grootschalige Topografie) (مقیاس شروع بزرگتر).
منابع
- باتنفیلد، BP; مک مستر، RB تعمیم نقشه: ایجاد قوانین برای بازنمایی دانش . Longman Scientific & Technical: هارلو، بریتانیا، 1991. [ Google Scholar ]
- Weibel, R. تعمیم داده های مکانی: اصول و الگوریتم های انتخاب شده. در مبانی الگوریتمی سیستم های اطلاعات جغرافیایی ; van Kreveld, M., Nievergelt, J., Roos, T., Widmayer, P., Eds. Springer: برلین، آلمان، 1997; صص 99-152. [ Google Scholar ]
- Mackaness، WA; رواس، ع. Sarjakoski، LT تعمیم اطلاعات جغرافیایی: مدل سازی نقشه برداری و کاربردها ; الزویر: آکسفورد، انگلستان، 2007. [ Google Scholar ]
- سستر، ام. برنر، سی. تعمیم مداوم برای تجسم در دستگاه های تلفن همراه کوچک. در تحولات در مدیریت داده های مکانی ; Springer: برلین، آلمان، 2005; صص 355-368. [ Google Scholar ]
- میتبو، تی. نوردویک، تی. اثرات انیمیشن ها در عملیات بزرگنمایی و متحرک روی نقشه های وب: یک آزمایش مبتنی بر وب. کارتوگر. J. 2007 , 44 , 292-303. [ Google Scholar ] [ CrossRef ]
- چیمانی، م. ون دایک، TC; Haunert, JH چگونه یک نمودار را بخوریم: محاسبه توالی انتخاب برای تعمیم مداوم شبکه های جاده ای. در مجموعه مقالات بیست و دومین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، دالاس/فورت ورث، تگزاس، ایالات متحده آمریکا، 4 تا 7 نوامبر 2014.
- هوانگ، ال. مایجرز، ام. شوبا، ر. van Oosterom، P. نقشه های وب مهندسی با بزرگنمایی تدریجی محتوا بر اساس داده های برداری جریانی. J. Photogramm. Remote Sens. 2016 , 114 , 274-293. [ Google Scholar ] [ CrossRef ]
- van Oosterom، P. ساختارهای داده توپولوژیکی در مقیاس متغیر مناسب برای انتقال پیشرونده داده: درخت GAP-face و جنگل لبه GAP. کارتوگر. Geogr. Inf. علمی 2005 ، 32 ، 331-346. [ Google Scholar ] [ CrossRef ]
- ون اوستروم، پی. مایجرز، ام. استوتر، جی. Šuba، R. ساختارهای داده برای تعمیم پیوسته: tGAP و SSC. در چکیده اطلاعات جغرافیایی در جهان غنی از داده ; Burghardt, D., Duchêne, C., Mackaness, W., Eds.; انتشارات بین المللی Springer: برلین، آلمان، 2014; صص 83-117. [ Google Scholar ]
- شوبا، ر. دریل، م. مایجرز، ام. ون اوستروم، پی. Eisemann, E. طرح تست قابلیت استفاده برای نقشه های واقعاً در مقیاس متفاوت. در مجموعه مقالات نوزدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، هلسینکی، فنلاند، 14 ژوئن 2016.
- ویس، آر. Weibel، R. انتخاب شبکه جاده برای نقشههای مقیاس کوچک با استفاده از الگوریتم بهبود یافته مبتنی بر مرکزیت. جی. اسپات. Inf. علمی 2014 ، 2014 ، 71-99. [ Google Scholar ] [ CrossRef ]
- ادواردز، آ. Mackaness، W. ساده سازی هوشمند شبکه جاده در مناطق شهری. در مجموعه مقالات کنفرانس GIS Research UK 2000 (GISRUK 2000)، پیتسبورگ، PA، ایالات متحده آمریکا، 4-8 آوریل 2000.
- تامسون، آرسی Richardson، DE اصل “تداوم خوب” سازمان ادراکی برای تعمیم شبکه های جاده ای اعمال می شود. در مجموعه مقالات نوزدهمین کنفرانس بین المللی کارتوگرافی، اتاوا، ON، کانادا، 14 تا 21 اوت 1999; ص 1215-1225.
- چن، جی. هو، ی. لی، ز. ژائو، آر. منگ، L. حذف انتخابی ویژگی های جاده بر اساس تراکم مش برای تعمیم خودکار نقشه. بین المللی جی. جئوگر. Inf. علمی 2009 ، 23 ، 1013-1032. [ Google Scholar ] [ CrossRef ]
- لی، ز. ژو، Q. ادغام سلسله مراتب خطی و منطقه ای برای نمایش مداوم چند مقیاسی شبکه های جاده ای. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 855-880. [ Google Scholar ] [ CrossRef ]
- ژو، Q. Li، Z. یک مطالعه مقایسه ای از استراتژی های مختلف برای الحاق بخش های جاده به سکته مغزی برای تعمیم نقشه. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 691-715. [ Google Scholar ] [ CrossRef ]
- ترنر، الف. از خطوط محوری به خطوط مرکزی جاده: یک نمایش جدید برای نحو فضا و یک مدل جدید از انتخاب مسیر برای تجزیه و تحلیل شبکه حمل و نقل. محیط زیست طرح. B طرح. طراحی 2007 ، 34 ، 539-555. [ Google Scholar ] [ CrossRef ]
- چکونی، ا. ویبل، آر. Barrault, M. بهبود تعمیم خودکار برای نقشه برداری وب درخواستی توسط پایگاه های داده چند مقیاسی. در پیشرفت در مدیریت داده های مکانی ; Springer: برلین، آلمان، 2002; صص 515-531. [ Google Scholar ]
- Cecconi، A. ادغام عمومی سازی نقشه برداری و پایگاه های داده چند مقیاسی برای نقشه برداری وب پیشرفته. Ph.D. پایان نامه، دانشگاه زوریخ، زوریخ، سوئیس، 2003. [ Google Scholar ]
- برویر، کالیفرنیا؛ دستورالعمل های Buttenfield، BP Framing برای طراحی نقشه های چند مقیاسی با استفاده از پایگاه های داده در وضوح های متعدد. کارتوگر. Geogr. Inf. علمی 2007 ، 34 ، 3-15. [ Google Scholar ] [ CrossRef ]
- تویا، جی. Girres, JF ScaleMaster 2.0: افزونه ScaleMaster برای نظارت بر تعمیم خودکار چند مقیاسی. کارتوگر. Geogr. Inf. علمی 2013 ، 40 ، 192-200. [ Google Scholar ] [ CrossRef ]
- نولنبورگ، ام. مریک، دی. ولف، ا. بنکرت، ام. چند خطوط مورفینگ: گامی به سوی تعمیم پیوسته. محاسبه کنید. محیط زیست سیستم شهری 2008 ، 32 ، 248-260. [ Google Scholar ] [ CrossRef ]
- دومونت، ام. تویا، جی. Duchêne, C. تعمیم خودکار سطوح متوسط در یک هرم چند مقیاسی. در مجموعه مقالات هجدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، ریودوژانیرو، برزیل، 21 تا 22 اوت 2015.
- مایجرز، ام. ون اوستروم، پی. مکعب در مقیاس فضا: یک مدل یکپارچه برای مناطق و مقیاس چند ضلعی دوبعدی. در مجموعه مقالات بیست و هشتمین سمپوزیوم مدیریت داده های شهری، دلفت، هلند، 28 تا 30 سپتامبر 2011. جلد 38، ص 95–102.
- ون اوستروم، پی. Meijers، M. به سمت ساختار واقعی در مقیاس متنوع که از زوم صاف پشتیبانی می کند. در مجموعه مقالات چهاردهمین کارگاه ICA/ISPRS در مورد تعمیم و بازنمایی چندگانه، پاریس، فرانسه، 30 ژوئن تا 1 ژوئیه 2011. صص 1-19.
- شوبا، ر. مایجرز، ام. هوانگ، ال. van Oosterom، P. تعمیم شبکه جاده ای پیوسته. در مجموعه مقالات هفدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، وین، اتریش، 23 سپتامبر 2014. صص 1-12.
- شوبا، ر. مایجرز، ام. ون اوستروم، ص. تعمیم شبکه جاده ای در مقیاس بزرگ برای نقشه مقیاس متنوع. در مجموعه مقالات هجدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، ریودوژانیرو، برزیل، 21 تا 22 اوت 2015. صص 1-10.
- یوترمارک، اچ. فوگلز، ا. van Oosterom، P. جنبه های معنایی و هندسی یکپارچه سازی شبکه های جاده ای. در مجموعه مقالات دومین کنفرانس بین المللی در مورد سیستم های اطلاعات جغرافیایی متقابل، زوریخ، سوئیس، 10-12 مارس 1999. صص 177-188.
- مایجرز، ام. ساوینو، اس. van Oosterom, P. SPLITAREA: الگوریتمی برای تقسیم وزنی چهره ها در زمینه یک پارتیشن مسطح. بین المللی جی. جئوگر. Inf. علمی 2016 ، 30 ، 1522-1551. [ Google Scholar ] [ CrossRef ]

شکل 1. نمونه ای از قطعات نقشه در دو مقیاس (سمت چپ در مقیاس بزرگتر، راست در مقیاس کوچکتر). توجه داشته باشید که فقط شبکه آب و جاده برای این دو مقیاس نمایش داده می شود که مستقیماً از پایگاه داده چند مقیاسی اصلی و بدون تغییر محتوا (منبع: OpenStreetMap، سبک: MapBox Studio) به دست آمده است.

شکل 2. اثر جانبی انتقال تدریجی از یک مقیاس به مقیاس دیگر (از چپ به راست). به دلایلی (شاید ویژگیهای مختلف؛ به عنوان مثال، نوع سطح جاده، نام یا محدودیت سرعت)، جاده قرمز از سه بخش تشکیل شده است. برای دستیابی به یک انتقال تدریجی، بخش های جداگانه به طور جداگانه تعمیم داده می شوند. این نمایش را از مساحتی در دقیق ترین مقیاس (چپ) به نیمه خطی در مقیاس “نیمه راه” (وسط) به خطی در مقیاس نهایی (راست) تغییر می دهد. به این واقعیت توجه داشته باشید که جاده کامل در یک لحظه از فرآیند توسط هر دو بخش منطقه ای و خطی به طور همزمان نمایش داده می شود. توجه داشته باشید که یکی از پیامدها تغییر توپولوژیکی است که در آن صورت A و Face B مجاور می شوند.

شکل 3. مثالی از تعمیم شبکه راه از مقیاس بزرگ ( a )، از طریق مرحله میانی ( b ، c )، به مقیاس نهایی ( d ). نمایش هندسی بخش / تقاطع جاده از مناطق 2 بعدی به بخش های 1 بعدی / نقطه 0 بعدی تغییر می کند، اما “ویژگی” (معنی)، و نقش آنها در شبکه خطی یکسان است.
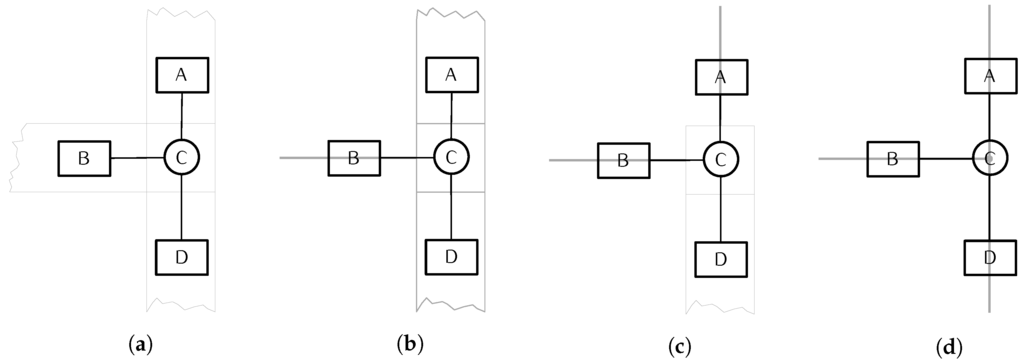
شکل 4. ( الف – د ) نمودار شبکه خطی وضعیت مشابه شکل 3 را نشان می دهد . روابط توپولوژیکی اشیاء جاده را در جایی که یک مستطیل نشان دهنده اتصال جاده و یک دایره یک اتصال جاده است را نشان می دهد.

شکل 5. دو قطعه نقشه از ورودی های مختلف ممکن که مرکز شهر لیدن، هلند را نشان می دهد: اول ( a )، نقشه توپوگرافی (TOP10NL) که برای استفاده در مقیاس نقشه 1:10000 در نظر گرفته شده است. دوم ( b )، نقشه پایه BGT (به هلندی: Basisregistratie Grootschalige Topografie) برای استفاده در مقیاس نقشه 1:500–1:5000 در نظر گرفته شده است. توجه داشته باشید که فقط ویژگی های شبکه جاده نمایش داده می شود.
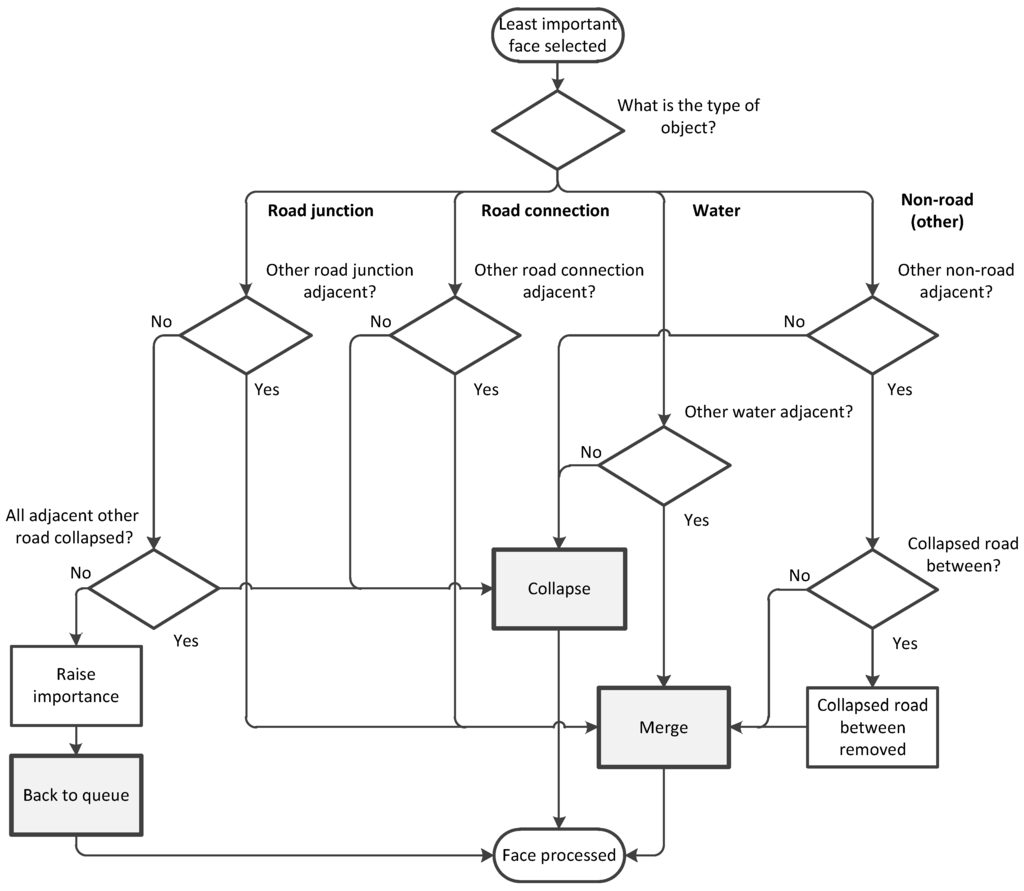
شکل 6. روشی که یک مرحله تعمیم انجام می شود. توجه داشته باشید که منطقه جاده هرگز با منطقه غیر جاده ای (سایر) ادغام نمی شود.
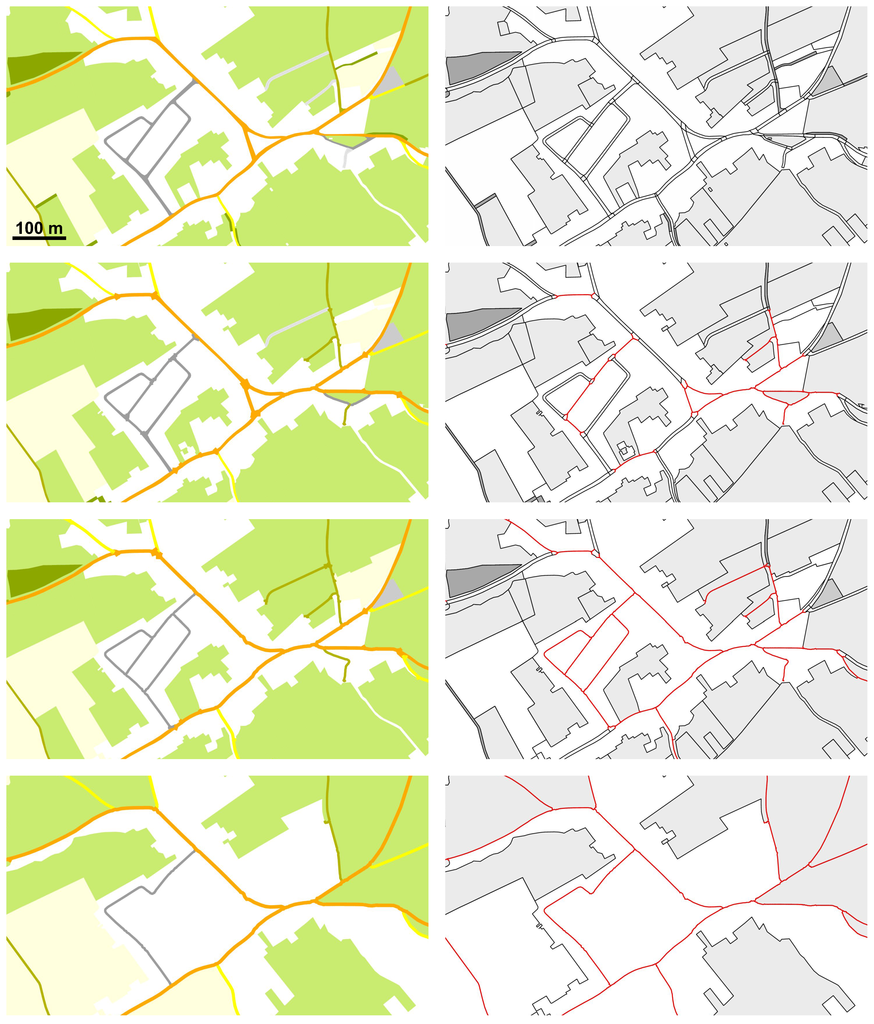
شکل 7. وضعیت تفصیلی در سراسر ترازو. همه نقشه ها در یک مقیاس هستند (و مقیاس دقیق چندان مرتبط نیست). چگونگی تکامل ساختار را نشان می دهد. نقشه های بالا در مقیاس ورودی هستند، جایی که همه اشیا با مناطق نشان داده می شوند. مقیاسهای «نیمه راه» در وسط قرار دارند، جایی که نمایش جادهها در هم آمیخته است (بر اساس مناطق و خطوط) و مقیاسهای تعمیمیافته در پایین هستند، جایی که جادهها فقط با خطوط نشان داده میشوند. نقشه سبک ( سمت چپ ) با وضعیت ساختار tGAP ( راست ) مطابقت دارد. خطوط قرمز (سمت راست) لبه های جاده فرو ریخته را نشان می دهد. توجه: تمام قطعات نقشه در یک مقیاس نمایش داده می شوند تا به وضوح تأثیر فرآیند تعمیم را نشان دهند (در واقعیت، قطعات نقشه پایین باید در مقیاس های کوچکتر نشان داده شوند).

شکل 8. نمونه ای از فرآیند تعمیم در منطقه روستایی (همه در یک مقیاس). شکل بالا ( a ) ورودی را نشان می دهد. شکل های دیگر ( b )، ( c ) و ( d ) قطعات نقشه را پس از 86.9٪، 94.4٪ و 98.2٪ از فرآیند نشان می دهد، که در آن 0٪ ورودی ( a ) با 11300 وجه و 100٪ یک وجه است.

شکل 9. ( a – f ) نمونه ای از فرآیند تعمیم برای مجموعه داده مرکز شهر. (الف) ورودی را نشان می دهد. زیرشکل های دیگر (bf) 60.6٪، 68.7٪، 80.8٪، 88.9٪ و 95.0٪ از فرآیند را نشان می دهند که 0٪ ورودی با 19400 چهره و 100٪ یک چهره است. توجه: قطعات نقشه در مقیاس های هدف مورد نظر نمایش داده می شوند. (الف) 1:10 k; (ب) 1:16 k; (ج) 1:18 k; (د) 1:23 k; (ه) 1:30 k; (f) 1:45 k.
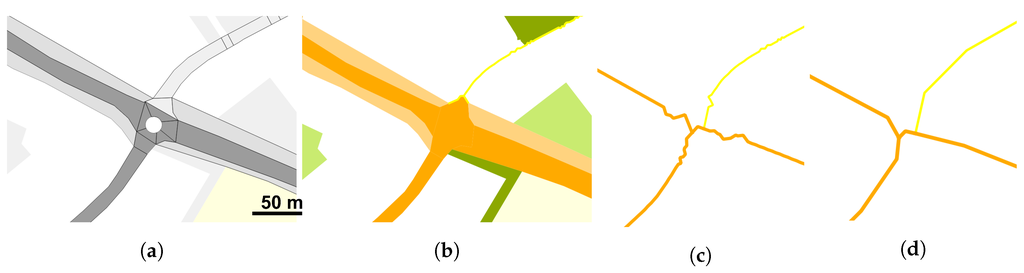
شکل 10. نمونه ای از فرآیند یک دوربرگردان. نمایش را از مساحت در پارتیشن اولیه در ( a )، ناحیه جزئی و خطی جزئی در ( b ) به خطی ( c ) تغییر میدهد. ( d ) زمانی که از ساده سازی خط استفاده می شود گزینه را نشان می دهد.
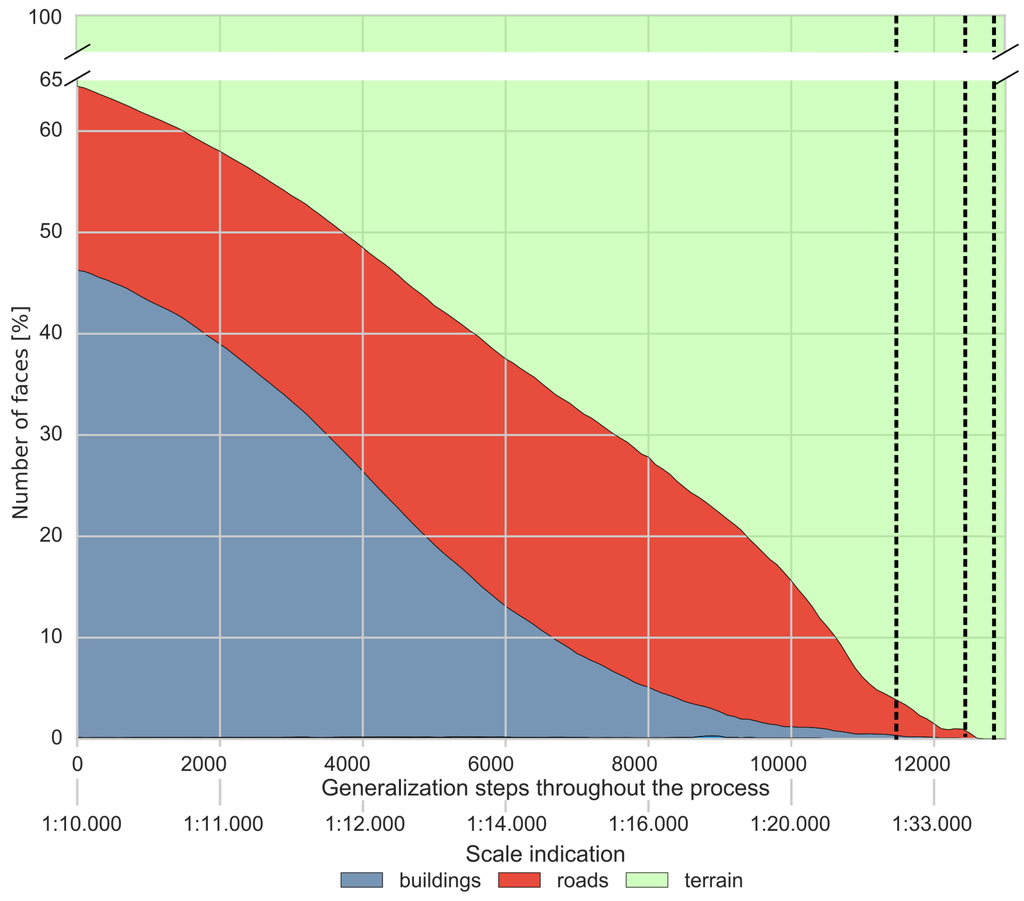
شکل 11. نسبت کلاس های ویژگی در سراسر فرآیند تعمیم در پارتیشن منطقه تعمیم یافته توپولوژیکی (tGAP). اعداد نسبی هستند (تعداد چهره ها در هر کلاس ویژگی تقسیم بر تمام چهره های موجود در نقشه). توجه داشته باشید که تعداد کل اشیاء در طول فرآیند کاهش می یابد. خطوط چین عمودی مقیاس های نقشه نشان داده شده در شکل 8 b–d را نشان می دهد.
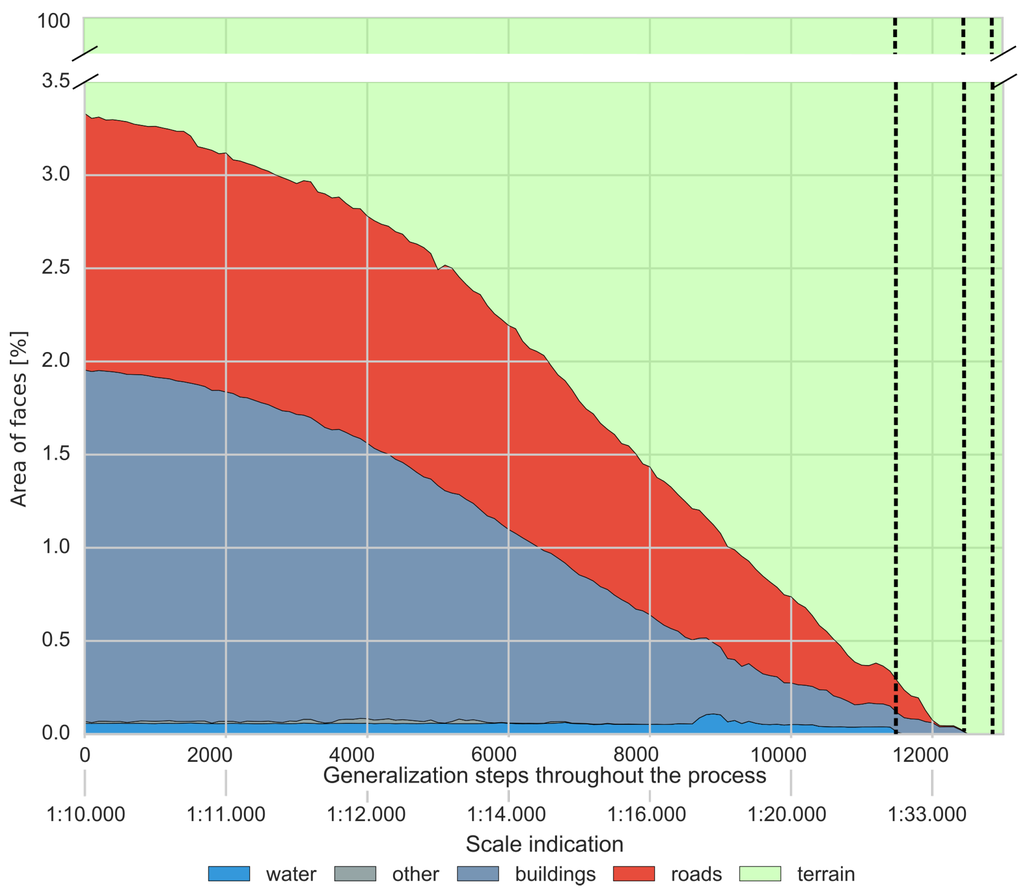
شکل 12. نسبت بین منطقه تحت پوشش در ساختار tGAP برای کلاس های ویژگی در سراسر فرآیند. نمودار مربوط به داده های شکل 8 است . خطوط چین عمودی مقیاس نقشه شکل 8 b–d را نشان می دهد. اعداد نسبی هستند.

شکل 13. تعداد وجوه جاده که توسط مناطق در سراسر فرآیند در شکل 8 نشان داده شده است .
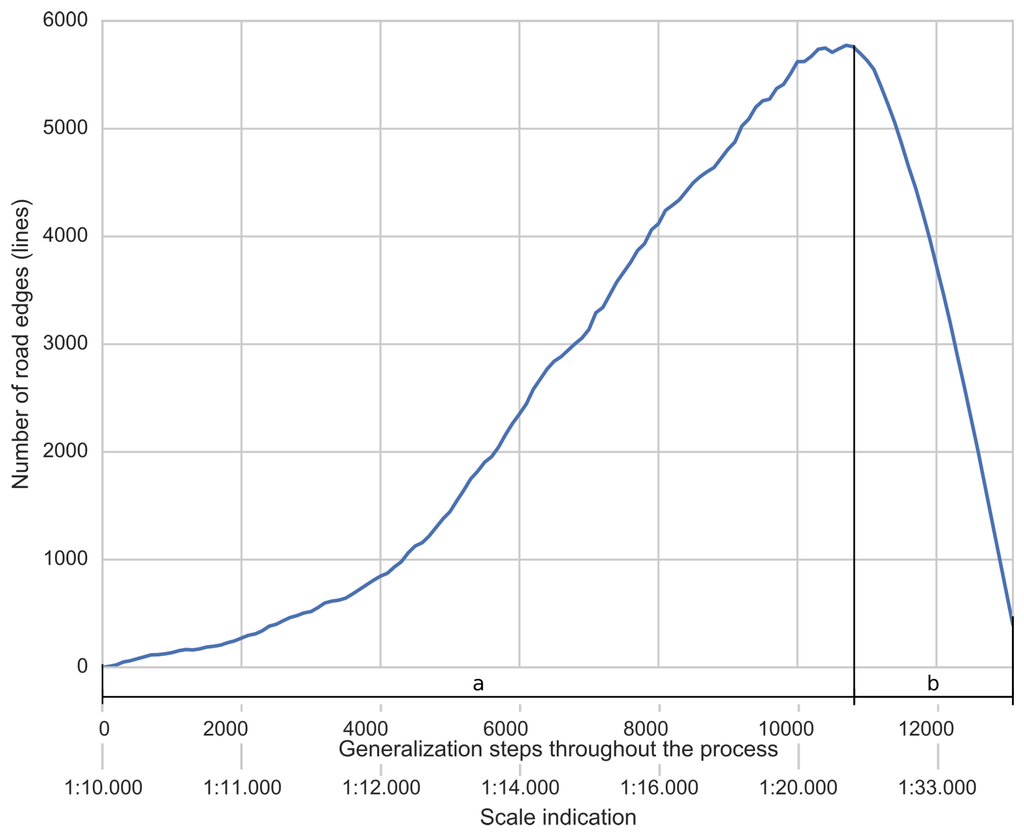
شکل 14. تعداد لبه های خط راه در سازه (جاده های فروریخته)، مربوط به شکل 8 . نمودار بخش a، که در آن تعداد اتصالات جادهای فروریخته افزایش مییابد، مرحله اولیه فرآیند را نشان میدهد، جایی که جادهها شکافته میشوند. بخش b، جایی که نمودار کاهش مییابد، وضعیتی را نشان میدهد که در آن دو شی منطقه با هم ادغام میشوند، و عمداً خطوط جادهای فرو ریخته بین آنها حذف میشود.
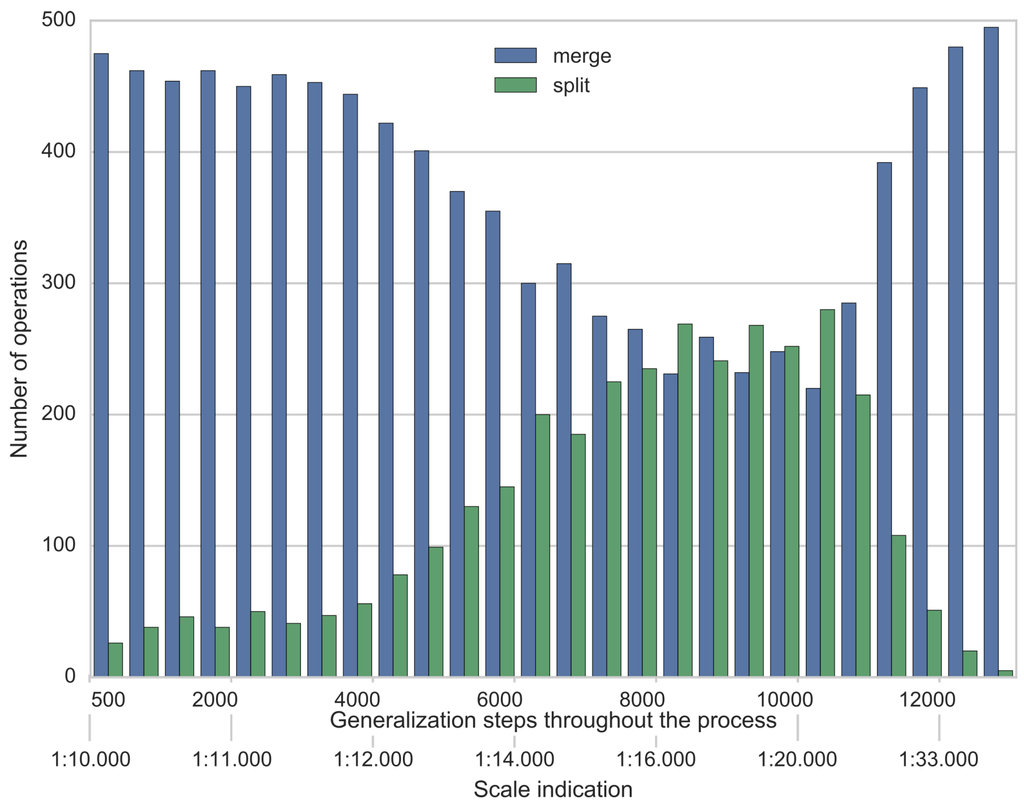
شکل 15. کاربرد عملگر تعمیم ادغام/حذف و تقسیم/ فروپاشی در طول فرآیند تعمیم. مربوط به مثال شکل 8 است .
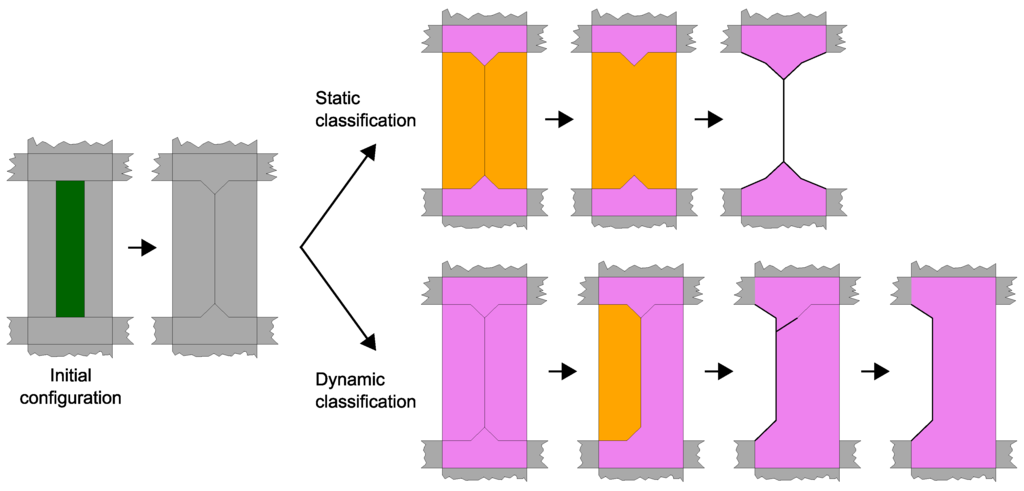
شکل 16. طبقه بندی شی جاده جایگزین در طول فرآیند تعمیم. با فروریختن نوار چمن بین جاده ها شروع می شود. اتصالات جاده به رنگ صورتی و اتصالات جاده به رنگ نارنجی.

شکل 17. طبقه بندی مجدد پس از عملیات تقسیم/ فروپاشی. یک شی اتصال جاده از پیکربندی اولیه ( سمت چپ ) را می توان به دو روش طبقه بندی کرد. یا همه شاخه ها (به رنگ قرمز) دارای طبقه بندی جاده هستند ( وسط ) یا فقط شاخه اصلی اطلاعات را حمل می کند ( سمت راست ).

شکل 18. عوارض جانبی طبقه بندی مجدد همه شاخه ها. این جزئیات به شکل 7 مربوط می شود .
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر