1. معرفی
سیستم موقعیت یاب جهانی (GPS) یک روش مشاهدات زمینشناسی رایج است که برای ارزیابی و ارزیابی رفتارهای استاتیکی، نیمه استاتیکی و دینامیکی سازهها تحت شرایط بار مختلف با استفاده از مشاهده بلادرنگ استفاده میشود. مزایای سیستم های نظارت GPS برای نظارت دینامیکی سازه ها را می توان در [ 1 ، 2 ] یافت. مزیت اصلی سیستم مانیتورینگ GPS اندازه گیری مختصات نقطه نظارت در سری های زمانی است. علاوه بر این، حرکات کامل در حوزه زمان قابل اندازه گیری است. با این حال، عیب اصلی استفاده از سیستم های GPS خطا و نویز مربوط به اندازه گیری آنها است. عملکرد مانیتورینگ GPS سازه ها از نظر خطا و نویز در [ 3 ، 4 ، 5 ارائه شده است.]. سیستمهای نرمافزار GPS تجاری میتوانند خطاهای اندازهگیری کوتاه پایه را حذف کنند، اما نویز اندازهگیری و خطاهای باقیمانده هنوز اندازهگیریهای دینامیکی GPS را آلوده میکنند. این مطالعه بر حذف نویزهای اندازه گیری GPS پس از پیش پردازش توسط نرم افزار GPS تمرکز دارد.
مطالعه رفتار سازه ها از نظر اندازه گیری، ارزیابی، نگهداری و قابلیت سرویس دهی، پایش سلامت سازه (SHM) نامیده می شود. GPS-SHM با فرکانس نمونه برداری بالا در مقایسه با ابزارهای معمولی برای نظارت بر تغییر شکل، جابجایی و ارتعاش سازه ها مزیت بسیار زیادی دارد. اخیراً از فرکانس نمونه برداری 10 تا 100 هرتز-GPS برای نظارت بر رفتار سازه ها استفاده و ارزیابی شده است [ 6 ، 7 ، 8 ، 9 ]. Moschas و Stiros [ 6 ] رفتار دینامیکی پل های کوتاه دهانه را با استفاده از فرکانس نمونه برداری 10 هرتز-GPS برآورد کردند. یو و همکاران [ 7 ] و کالوپ و لی [ 9] پل های کوتاه، متوسط و بلند را با استفاده از فرکانس نمونه برداری GPS 20 هرتز نظارت کرد. آنها به این نتیجه رسیدند که دقت مشاهدات GPS را می توان تا سطح زیر میلی متری هنگام نظارت بر پاسخ ارتعاشی پل های کوتاه، متوسط و بلند تخمین زد. Moschas و Stiros [ 8 ] از فرکانس نمونه برداری 100 هرتز برای ارزیابی یک پل عابر استفاده کردند و دریافتند که انحراف را می توان تا چند میلی متر برای فرکانس طبیعی پل تا 7 هرتز اندازه گیری کرد. یی و همکاران [ 10] فرکانس های نمونه برداری GPS 50 و 100 هرتز را برای ارزیابی عملکرد رفتار استاتیک و دینامیکی ارزیابی کرد و دریافت که فرکانس نمونه برداری بالا برای تخمین رفتار سازه های سفت و انعطاف پذیر قابل استفاده است. این مقاله به بررسی حساسیت اندازهگیریهای GPS با فرکانس نمونهبرداری پایین و بالا، 1 و 20 هرتز، در حوزه زمان و فرکانس میپردازد. نتایج به ارزیابی سیستم های نظارت GPS مناسب برای استفاده بر اساس کیفیت، در دسترس بودن و هزینه کمک می کند.
برای ارزیابی ساختارهای مبتنی بر سیستمهای مانیتورینگ GPS، پردازش اندازهگیریهای GPS عمدتاً از فیلتر کردن و صاف کردن برای حذف اثرات خطا و نویز GPS استفاده میکند. Kaloop و Hu [ 11 ] از فیلترهای شبکه عصبی برای تخمین عملکرد دینامیکی یک پل با دهانه طولانی استفاده کردند و دریافتند که شبکه های عصبی را می توان برای حذف نویز GPS استفاده کرد. Moschas و Stiros [ 3 ، 6 ، 8 ] سری زمانی اندازهگیریهای جابجایی را با استفاده از میانگین متحرک و فیلتر باند گذر برای مشاهده مولفههای جابجایی نیمه استاتیک و پویا در دهانههای کوتاه، نویز زدایی کردند. یو و همکاران [ 7] از یک فیلتر تطبیقی چند حالته برای تخمین رفتار پلهای با دهانه کوتاه و متوسط استفاده کردند و دریافتند که الگوریتم پیشنهادی میتواند دقت اندازهگیریهای GPS را بهبود بخشد. فنگ و همکاران [ 12 ] از فیلتر کالمن توسعه یافته (EKF) برای شناسایی سطوح مختلف آسیب به یک پل در مقیاس بزرگ ناشی از حرکات زلزله استفاده کرد. همچنین گزارش شده است که EKF ابزار خوبی برای حذف نویز و خطای GPS است [ 12 ، 13 ]. تجزیه و تحلیل موجک برای تجزیه و تحلیل رفتار ساختارها و ارزیابی عملکرد آنها استفاده می شود [ 14 ، 15 ]. اوگوندیپ و همکاران [ 16 ] از روش موجک برای حذف نویز داده های GPS جمع آوری شده از یک پل کابلی استفاده کرد. کالوپ و کیم [ 17] تجزیه و تحلیل مؤلفه اصلی موجک را برای تخمین رفتار یک پل راه آهن و حذف صدای خطای اندازه گیری GPS و نویز دینامیکی مرتبط با حرکات سازه اعمال کرد. علاوه بر این، بسیاری از روشهای فیلتر و صافسازی اندازهگیری GPS برای تخمین رفتار استاتیکی و دینامیکی دقیق سازهها استفاده میشوند [ 13 ، 18 ، 19 ]، و ادغام GPS با اندازهگیریهای شتابسنج نیز مورد مطالعه قرار میگیرد [ 20 ، 21 ، 22]]. بنابراین، در این مطالعه، سه روش رایج فیلتر زدایی و صافسازی، غیرخطی تطبیقی- بازگشتی حداقل مربعات، EKF و تحلیل مؤلفههای اصلی موجک برای شناسایی مناسبترین رویکرد برای استخراج مؤلفههای رفتار سازه در زمان و زمان مقایسه شده است. حوزه های فرکانس
مقاله به شرح زیر سازماندهی شده است: بخش 2 سه روش رایج مورد استفاده برای صاف کردن و فیلتر کردن اندازهگیریهای GPS را خلاصه میکند. بخش 3 مطالعه تجربی طراحی شده را برای ارزیابی عملکرد سه روش ارائه می کند. توصیف و ارزیابی نظارت بر زمان واقعی دو مطالعه موردی با بارهای مختلف نیز در بخش 3 ارائه شده است . سپس، نتیجه گیری در بخش 4 ارائه شده است .
2. روش شناسی
اندازهگیریهای GPS حرکت سازه به اجزای نیمه استاتیک (طولانی مدت)، دوره کوتاه و پویا تقسیم میشوند [ 23 ]. بنابراین، برای محاسبه مولفه حرکت طولانی مدت، اندازه گیری ها باید فیلتر یا صاف شوند. سه روش متداول برای استخراج مولفه های دوره طولانی در بخش های فرعی زیر ارائه و ارزیابی شده است.
2.1. فیلتر حداقل مربعات تطبیقی- بازگشتی
روشهای برآورد حداقل مربعات سنتی برای رفتار ساختاری میتواند برای استخراج سریهای زمانی پاسخ واقعی و مقایسه نتیجه با سیگنالهای اندازهگیری شده استفاده شود. فیلتر حداقل مربعات بازگشتی (RLS) یکی از الگوریتم های حداقل مربعات (LS) است. ثابت شده است که این روش بهتر از سایر الگوریتم های LS در استخراج اندازه گیری های بسیار دقیق است [ 24 ]. RLS با استفاده از یک الگوریتم بازگشتی تطبیقی برای تخمین بردار وزن برای تکرار فیلتر توسعه یافته و بهبود یافته است [ 24 ، 25 ]. فیلتر تطبیقی Volterra RLS مرتبه دوم برای شناسایی عملکرد غیرخطی سازه ها محبوب ترین است [ 26 ، 27]]. از تمایز خطای نمایی برای تخمین ضریب فیلتر در این الگوریتم استفاده می شود که به ماتریس همبستگی P(t) سیگنال ورودی و ماتریس همبستگی متقاطع سیگنال های ورودی x (t) و d(t) دلخواه بستگی دارد. . در این مطالعه، RLS با فیلتر درجه دوم Volterra برای تخمین رفتار دینامیکی غیرخطی سازهها بر اساس سیستمهای مانیتورینگ GPS اعمال میشود. تنظیم سری زمانی GPS ( x(t) ( t = 1, 2, …, n)) بر اساس RLS متمرکز بر ماتریس وزن به روز شده ( w(t) ) و بردار افزایش ( k ( t )ک(تی)). جدول 1 فرآیند غیرخطی RLS را خلاصه می کند [ 28 ، 29 ]. برای محاسبه حرکات تنظیم شده سازه ( y ( t )) و تخمین خطاهای اندازه گیری e(t) ، پاسخ مورد نظر در زمان d ( t ) بر اساس اندازه گیری های ورودی محاسبه می شود [ 29 ]. سیگنال های مورد نظر با استفاده از سیستم شناسایی فیلتر پاسخ ضربه محدود (FIR) محاسبه می شوند [ 7 ، 30 ]. علاوه بر این، وزن اولیه ( w (0)) و ضریب فراموشی ( λ�) مقادیر به ترتیب 0 و 1 در نظر گرفته می شوند. ارزش δ�یک پارامتر تنظیم است. ثابت مثبت نشان دهنده نسبت سیگنال به نویز بالا (SNR) و ثابت منفی SNR پایین است. در اینجا، δ�یک مقدار مثبت کوچک فرض می شود.
2.2. فیلتر کالمن توسعه یافته
فیلتر کالمن (KF) یک فیلتر رایج است که برای تشخیص موقعیت دقیق حرکات نقطه استفاده می شود [ 31 ]. EKF یک نوع KF است که برای تخمین عملکرد سازه، به ویژه رفتار غیرخطی آنها استفاده می شود. EKF الگوریتم تخمین حالت بیزی استاندارد برای سیستم های غیرخطی در کاربردهای مهندسی عمران است [ 32 ، 33 ]. خطیسازی مرتبه اول انتقال حالت و ماتریسهای مشاهده سیستم غیرخطی، مفهوم اصلی EKF است [ 31 ]. برای اندازهگیریهای GPS بلادرنگ، سیستم زمان گسسته حالت n تصادفی در نظر گرفته میشود که سیستم (معادله (1)) و اندازهگیری (معادله (2)) [29] را به صورت زیر در بر میگیرد :
جایی که ایکستیایکستیبردار حالت است، yتی�تیبردار اندازه گیری در زمان t است ، wt – 1�تی–1~ ن( 0 ,سt – 1)ن(0،ستی–1)نویز فرآیند گاوسی است، vتی�تی~ ن( 0 ,آرt – 1)ن(0،آرتی–1)نویز اندازه گیری گاوسی است، t = 1، 2، …، n، f (.) تابع مدل پویا و h (.) تابع اندازه گیری است. فرآیند فیلتر رو به جلو بر اساس حالت خطی شده و بردارهای اندازه گیری با بسط های سری تیلور [ 29 ، 32 ] اجرا می شود. در این مطالعه، سیستمهای دینامیکی غیرخطی با استفاده از گام پیچیده ژاکوبین خطیسازی میشوند. زمان EKF و بهروزرسانی اندازهگیری برای دستیابی به تخمینهای بهینه موقعیتیابی GPS همانطور که در جدول 2 نشان داده شده است، پردازش میشوند [ 31 ، 34 ].
در اینجا، ژاکوبین ها برای حالت و اندازه گیری را می توان به صورت زیر تعریف کرد:
بنابراین، روند الگوریتم EKF را می توان به صورت زیر ارائه کرد [ 34 ]:
مرحله فیلتر کردن:
که در آن K بردار بهره کالمن است.
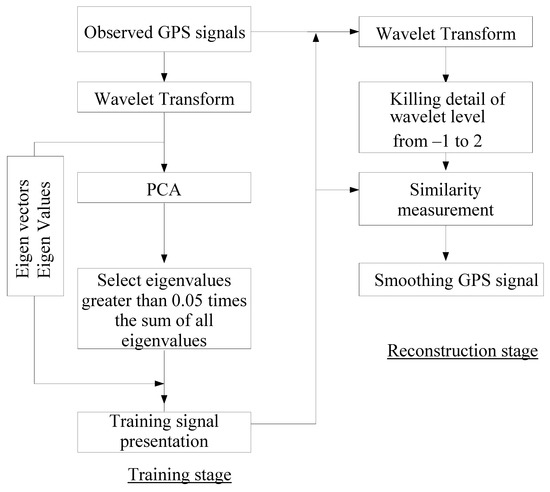
2.3. روش PCA موجک
تجزیه و تحلیل موجک و مؤلفه اصلی (PCA) یکی از محبوبترین روشها برای استخراج اطلاعات واقعی از اندازهگیریهای سری زمانی است [ 17 ، 35 ]. موجک PCA (WPCA) یکی از روش های رایج برای هموارسازی اندازه گیری های بلادرنگ است [ 17 ]. این روش در [ 17 ، 36 ] پیشنهاد شده است و فرآیند هموارسازی اندازه گیری سری زمانی GPS بر اساس WPCA در زیر توضیح داده شده است.
روش مورد استفاده برای حذف خطای GPS و نویز اندازه گیری در شکل 1 نشان داده شده است . این شامل دو مرحله است: آموزش و بازسازی. در مرحله آموزش، سطح موجک تبدیل شده (DWT) ( J ) هر جهت از ماتریس مشاهده GPS (X) با موجک مادر Symlets با استفاده از Matlab محاسبه می شود. مراحل اصلی برای هموارسازی موجک، تجزیه سیگنال ها به جزئیات و ضرایب تقریبی، سپس حذف آستانه ضرایب جزئیات کوچک و بازسازی سیگنال است [ 36 ]. در اینجا ذکر شده است که ضرایب موجک همبستگی قوی ندارند اما به یکدیگر بستگی دارند [ 30]. بنابراین در مرحله بازسازی از تمامی ضرایب استفاده می شود. مقادیر ویژه و بردارهای ویژه از ماتریس همبستگی خودکار محاسبه می شوند و سپس مقادیر ویژه به ترتیب نزولی مرتب می شوند تا بردارهای ویژه با مقادیر ویژه بیشتر از 0.05 برابر مجموع مقادیر ویژه سیگنال ها انتخاب شوند. در نهایت این مرحله سیگنال های اصلی و بازسازی شده را نمایش می دهد. در مرحله بازسازی، کیفیت سیگنال های بازسازی شده (ساخته شده از مرحله آموزش) با محاسبه میانگین مربعات نسبی خطا (باید نزدیک به 100٪ باشد) بررسی می شود. از مرحله قبل، تعداد اجزای اصلی حفظ شده ارائه شده است. این نتایج میتواند سیگنالها را با حذف نویز بر اساس از بین بردن جزئیات موجک در سطوح انتخابشده، بهبود بخشد.30 ، 36 ، 37 ].
از سوی دیگر، برای استخراج فرکانس بنیادی سازه ها از داده های GPS، تبدیل فوریه سریع (FFT) و تبدیل فوریه کوتاه مدت (STFT) را می توان اعمال کرد. این دو روش در [ 30 ] ارائه شده است.
3. نتایج و بحث
3.1. ارزیابی عملکرد روش
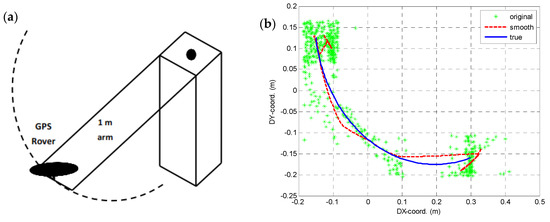
برای ارزیابی عملکرد سه روش، یک سیستم مانیتورینگ دوگانه GPS (RTK) زمان واقعی سینماتیک استفاده میشود. سیستم مانیتورینگ شامل پایه گیرنده جی پی اس Trimble-5700 و مریخ نورد (فاصله بین مریخ نورد و پایه گیرنده های GPS 10 متر است) برای کاهش خطاهای چند مسیره. دقت دستگاه های GPS مورد استفاده (گیرنده جی پی اس Trimble 5700) در جهت افقی 1 سانتی متر + 1 پی پی ام (طول خط پایه) و 2 سانتی متر + 1 پی پی ام (طول خط پایه) برای جهت عمودی و فرکانس نمونه برداری است. نرخ 1 هرتز است. GPS مریخ نورد بر روی یک بازوی چرخان (طول 1.0 متر) که روی یک مسیر قوس حرکت می کند، همانطور که در شکل 2 نشان داده شده است پشتیبانی می شود.a، و داده های جمع آوری شده به سیستم مختصات ژئودتیک جهانی 1984 (WGS84) تبدیل می شوند. مختصات نسبی (مختصات اندازه گیری شده-میانگین مختصات (DX & DY)) جمع آوری شده و سیگنال های GPS بدون نویز بر اساس روش های خلاصه شده در شکل 2 ب و شکل 3 ارائه شده است . پارامترهای ارزیابی مورد استفاده برای ارزیابی سه روش عبارتند از: ریشه میانگین مربع (RMS)، پیک مثبت خطا (EPP)، اوج منفی خطا (ENP)، و نسبت سیگنال به نویز (SNR). جدول 3 خطاهای سه روش را نشان می دهد.
در روش RLS، موقعیت های ریاضی GPS برای تشخیص سیگنال های مورد نظر (واقعی) استفاده می شود. در اینجا، سیگنال های مورد نظر بر اساس حرکت بازوی آزمایشی محاسبه می شوند، همانطور که در شکل 2 ب نشان داده شده است. ضریب فراموشی RLS 1 در نظر گرفته می شود و ماتریس معکوس کوواریانس سیگنال ورودی 1 × I (20) است (I ماتریس هویت است). شکل 3 الف نشان می دهد که مشاهده تاخیر بر سیگنال های فیلتر شده تاثیر می گذارد. همبستگی بین مشاهدات اصلی و فیلتر شده برای جهت X و Y به ترتیب 0.99 و 0.96 است. این نتیجه به این معنی است که بیشتر اطلاعات حرکت بازو به خوبی توسط این روش نمایش داده می شود. جدول 3نشان می دهد که RLS دقت مشاهدات تاریخچه زمانی GPS را به ترتیب 72% و 79% در جهت Y و X افزایش می دهد. علاوه بر این، برخی از اطلاعات از مشاهدات تاریخچه زمانی در ابتدای موقعیت پیش بینی برای نقاط GPS از بین می رود.
در EKF، یک تابع خطی بین بردارهای حالت پیش و پسین به دلیل مشاهده محدود داده در نظر گرفته شده است. علاوه بر این، رابطه بین بردارهای مشاهده شده و حالت خطی برای تخمین اولین بردار پیش بینی سری زمانی فرض می شود. سپس، سیستم دینامیکی غیرخطی اندازه گیری مختصات GPS با استفاده از تمایز گام پیچیده (ژاکوبین)، همانطور که در جدول 2 نشان داده شده است، خطی می شود . در این قسمت تاخیر زمانی نتایج فیلتر مشاهده نمی شود زیرا تابع خطی در مرحله اول همانطور که در شکل 3 نشان داده شده است در نظر گرفته شده است.ب علاوه بر این، همبستگی بین مشاهدات اصلی و فیلتر شده به ترتیب 0.98 و 0.97 برای جهت X و Y محاسبه شده است، به این معنی که EKF می تواند حرکت بازو را بهتر از RLS نشان دهد. EKF دقت مشاهده تاریخچه زمانی GPS را به ترتیب 75% و 80% در جهت Y و X افزایش می دهد ( جدول 3 )، بدون از دست دادن اطلاعات از تاریخچه زمانی مشاهدات GPS.
برای روش WPCA، DWT در سطح 3 از هر طیف از ماتریس مشاهداتی X با موجک Symlet 12 استفاده می شود و مراحل WPCA (در شکل 1 ارائه شده ) اعمال می شود. نتایج این روش نشان می دهد که همبستگی های محاسبه شده بین مشاهدات اصلی و فیلتر شده به ترتیب 99/0 و 98/0 برای جهت X و Y است ( شکل 3 ج). این نتیجه به این معنی است که WPCA از RLS و EKF در پیش بینی موقعیت دقیق حرکات نقطه بازو بهتر است. WPCA دقت مشاهدات تاریخچه زمانی GPS را به ترتیب 76% و 85% برای جهتهای Y و X افزایش میدهد ( جدول 3)، بدون از دست دادن اطلاعات از مشاهدات تاریخچه زمانی GPS. بنابراین با مقایسه این سه روش به این نتیجه میرسد که WPCA بهترین روش برای تشخیص پاسخ نیمه استاتیک سازهها بدون از دست دادن اطلاعات است. در همین حال، مقادیر پارامترهای آماری SNR و RMS به ترتیب مقادیر بالا و پایین را نشان میدهند. شکل 2 b سیگنال های واقعی و مشاهداتی صاف شده را بر اساس WPCA نشان می دهد. سیگنال های هموار و واقعی بسیار نزدیک هستند. بر اساس این نتایج، WPCA را می توان برای ارزیابی رفتار استاتیک و دینامیکی پل های کوتاه و بلند با اندازه گیری های GPS نمونه برداری کم و زیاد استفاده کرد. همانطور که در جدول 3 ارائه شده است ، اعوجاج هر جهت ( د=Δایکس2+ Δy2–––––––––√د=Δایکس2+Δ�2، جایی که Δ xΔایکسو Δ yΔ�اعوجاج حداکثر خطا در جهت X و جهت Y به ترتیب) سیگنال های فیلتر شده با RLS، EKF و WPCA به ترتیب 0.35، 0.27 و 0.19 متر هستند. این نتیجه به این معنی است که واریانس در بردارهای ورودی و خروجی برای روشهای RLS و EKF بر خروجی دو روش تأثیر میگذارد. با این حال، نسبت واریانس و زمان ردیابی باید برای بهبود کیفیت دو روش مورد مطالعه قرار گیرد، که هنوز توسط نویسندگان تحت بررسی است.
3.2. ارزیابی رفتار پل
برای بررسی اثربخشی فرکانس نمونهبرداری کم و بالا، عملکرد فرکانسهای نمونهبرداری یک و 20 هرتز مورد بررسی قرار میگیرد. دو مطالعه موردی ارائه شده است: پل راه آهن منصوره و پل یونگه با دهانه طولانی. پایش نقطه سفت پل منصوره برای ارزیابی خطاهای GPS 1 هرتز و بررسی عملکرد دینامیکی پل مورد بحث قرار گرفته است. ارزیابی حرکت برج پل با دهانه بلند (Yonghe) با استفاده از فرکانس نمونه برداری 20 هرتز مورد مطالعه قرار گرفته و خطای GPS برای این ابزار مورد بحث قرار گرفته است.
3.2.1. ارزیابی پل راه آهن منصوره
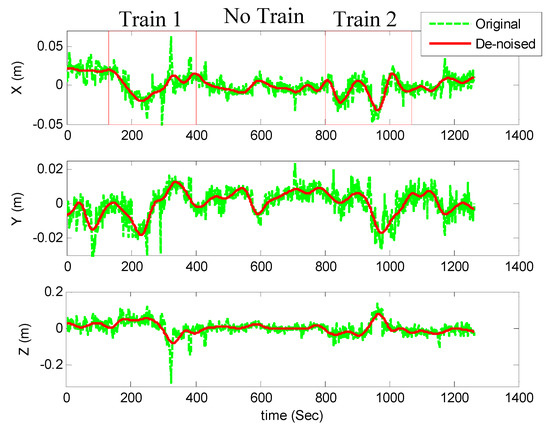
پل راه آهن منصوره یکی از قدیمی ترین پل های شهر منصوره مصر است که شهرهای منصوره و تلخه را به هم متصل می کند. شکل 4 پل و سیستم مانیتورینگ مورد استفاده را نشان می دهد. پل از چهار تیر خرپایی قوسی اصلی تشکیل شده است و طول هر تیر 70 متر است. این پل برای دو نوع ترافیک استفاده می شود: قطار در وسط (دو خط) و یک خط خودرو در هر طرف پل. برای ارزیابی پاسخ پل تحت بارهای فعلی قطار، از یک RTK-GPS یک هرتز استفاده می شود. همانطور که در شکل 4 نشان داده شده است، ایستگاه پایه بررسی RTK بر روی زمین پایدار راه اندازی شده است، و فرستنده رادیویی به سیستم مانیتورینگ متصل است. فاصله بین ایستگاه پایه و موقعیت مریخ نورد 188 متر است و بنابراین دقت اندازه گیری ها یک سانتی متر است [ 38]]. RTK-GPS برای جمع آوری داده های خام با نرخ 1 هرتز استفاده می شود. شرایط اندازه گیری مساعد بود: گیرنده بدون هیچ گونه مانعی برای دید زاویه 15 درجه از افق بود، و حداقل چهار ماهواره GPS به طور مداوم ردیابی شدند. گیرندههای GPS دو فرکانس Trimble-5700 که با سرعت 1 هرتز ضبط میکردند. داده های جمع آوری شده با استفاده از نرم افزار GPS-Trimble Business Center پس پردازش شدند. خروجی های نرم افزار GPS سری زمانی مختصات دکارتی آنی گیرنده مریخ نورد در سیستم مختصات WGS84 (x,y,z) بود. یک سیستم مختصات پل محلی (BCS) (X، Y، Z) برای تجزیه و تحلیل و ارزیابی داده های مشاهده شده ایجاد شد. مختصات در WGS84 با تبدیل تشابه دوبعدی به مختصات BCS تبدیل میشوند [ 17]]، و دقت حرکت با استفاده از حداقل مربعات محاسبه می شود. در اینجا، دادههای X، دادههای Y و دادههای Z به ترتیب نشاندهنده تغییرات جابجایی در امتداد جهت طولی، جهت عرضی و جهت ارتفاع پل هستند. مختصات گیرنده در سه بعد به یک سری زمانی از جابجایی های ظاهری حول یک نسبی 0 تبدیل شد که نشان دهنده سطح تعادل نقطه نظارت است، همانطور که در شکل 5 نشان داده شده است . در دوره نظارت، دو قطار از روی پل به سمت منصوره عبور کردند.
حرکت نقطه سفت نظارت می شود ( شکل 4 ج) برای ارزیابی استخراج دینامیکی برای سیستم مانیتورینگ GPS 1 هرتز، و همچنین برای ارزیابی دقت برآورد WPCA. شکل 5سیستم نظارت سری زمانی و حرکت هموار WPCA را با و بدون عبور قطار در طول زمان نظارت نشان می دهد. حرکات صاف استخراج شده نشان می دهد که GPS 1 هرتز را می توان برای تخمین اجزای حرکت نیمه استاتیک استفاده کرد، در حالی که حداکثر تغییر شکل زمانی رخ داد که قطار از روی پل عبور کرد. علاوه بر این، حداکثر تغییرات در جهت X، Y و Z با قطار شماره یک به ترتیب 40.12، 30.68 و 134.89 میلی متر و با قطار شماره دو به ترتیب 47.06، 25.08 و 118.14 میلی متر است. علاوه بر این، حداکثر تغییر بین دو قطار به ترتیب 24.77، 15.13 و 50.08 میلی متر برای جهت های X، Y و Z است. پارامترهای آماری (حداکثر (حداکثر)، حداقل (حداقل)، میانگین (M)،جدول 4 .
شکل 5 و جدول 4 نشان می دهد که دقت حرکات هموار اندازه گیری ها برای جهات X، Y و Z به ترتیب 25%، 21% و 27% در مورد قطار 1 و 29% افزایش یافته است. 25% و 45% برای جهت های X، Y و Z به ترتیب، زمانی که هیچ قطاری از روی پل عبور نمی کند. بنابراین، می توان نتیجه گرفت که WPCA برای تشخیص رفتار واقعی پل در حوزه زمانی مناسب است. دقت اندازهگیریها زمانی که پل بارگذاری میشود (گذر قطار) تحت تأثیر قرار میگیرد (کاهش مییابد) زیرا نویز و خطای دینامیکی اندازهگیریهای GPS را آلوده کرده است [ 5 ، 8 ].
علاوه بر این، ارزیابی سری زمانی حرکات پل نشان می دهد که حداکثر حرکات در جهت Z در هر دو حالت بار رخ داده است. علاوه بر این، حداکثر حرکت در جهت X زمانی که پل خالی بود (هیچ قطاری عبور نمی کند) بیشتر از جهت Y بود که به این معنی است که خطاها در جهت X قابل توجه است. میانگین حرکات پل در هر دو حالت بار کوچک و ناچیز است، به این معنی که حرکت پل تحت تأثیر بار قطار ایمن است. علاوه بر این، خاطرنشان می شود که یک سیستم نظارت طولانی مدت باید برای ارزیابی رفتار کامل پل تحت بار قطار و اثرات زیست محیطی روی پل طراحی و نصب شود.
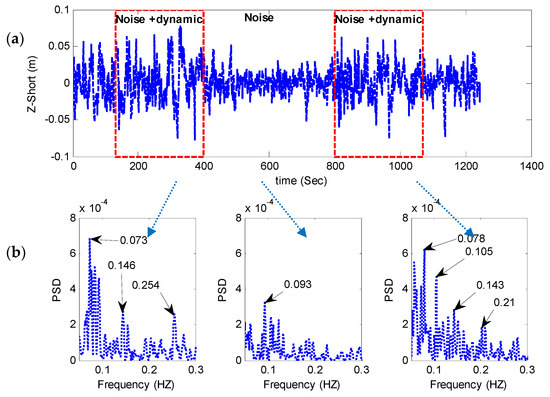
از جدول 4 ، بالاترین حرکات پل در جهت Z مشاهده می شود. بنابراین، دامنه فرکانس جهت Z برای مطالعه رفتار دینامیکی پل در نظر گرفته شده است. FFT برای استخراج مولفه فرکانس سه مورد بارگذاری برای پل استفاده می شود. فرکانس و چگالی طیف توان محاسبه شده است. یک آستانه سه برابر SD دوره کوتاه محاسبه شده برای حذف خطاها در موقعیت های GPS و حفظ نرمال بودن توزیع احتمال اندازه گیری ها اعمال می شود. علاوه بر این، یک فیلتر پاسخ تکانه محدود (طراحی شده توسط Matlab برای حذف نویزهای دینامیکی استفاده می شود. مولفه های حرکت پل کوتاه مدت و فرکانس موارد بارگذاری در شکل 6 ارائه شده است.. همانطور که در شکل 6 نشان داده شده است، نقطه نظارت صلب انتخاب شده برای استخراج نویز دینامیکی اندازه گیری های GPS استفاده می شود . اجزای اندازه گیری PSD کیس تخلیه مقادیر کمتری نسبت به موارد بارگذاری شده نشان می دهد و فرکانس غالب 0.093 هرتز است.
دامنه مولفه حرکت دوره کوتاه بیشتر از حالت تخلیه است. مولفه های فرکانس در شکل 6 ارائه شده استب حالت های فرکانس مورد قطار اول 0.073، 0.146 و 0.254 هرتز است، در حالی که در مورد قطار دوم 0.078، 0.105، 0.143 و 0.21 هرتز است. جزء فرکانس اندازهگیریهای GPS نشان میدهد که در این مورد، نویز را میتوان تا 0.093 هرتز تحت تأثیر قرار داد. با این حال، سه جزء اول حالت فرکانس پل 0.105، 0.146 و 0.21 هرتز هستند. از نتایج مولفه های سری زمانی و فرکانس، این نتیجه حاصل می شود که نویز در GPS مورد استفاده زیاد است و داده های صاف شده با استفاده از FFT را می توان برای استخراج حرکات و حالت های فرکانس قطعات استفاده کرد. علاوه بر این، اجزای فرکانس در این مورد محدود هستند، زیرا حالتهای فرکانس ساختاری بیش از 0.3 هرتز را نمیتوان تخمین زد [ 23 ].
3.2.2. ارزیابی پل یونگه با دهانه بلند
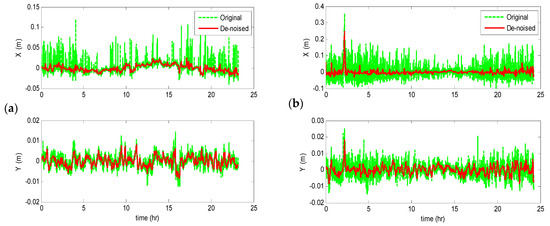
پل یونگه یکی از قدیمی ترین پل های با دهانه طولانی در سرزمین اصلی چین است. شکل 7 پل و سیستم مانیتورینگ GPS را نشان می دهد. سازه پل از نوع بتنی کابلی پیش تنیده با پایه های دوتایی با دهانه اصلی 260 متر می باشد. عرض کل عرشه پل 13.6 متر شامل خطوط جاده 9.0 متر و پیاده روها در دو طرف پل است. جزئیات بیشتر در مورد مصالح و خواص ساخت پل را می توان در [ 39 ] یافت. در سال 2007، یک سیستم بلند مدت SHM طراحی شد و همانطور که در [ 9 ، 38 ، 40 ارائه شده است، استفاده شد.]. دو گیرنده کاوشگر GPS در بالای دو برج (شمال، شمال و جنوب، S) نصب شده است، و یک ایستگاه پایه در یک بانک نزدیک پل بسته شده است ( شکل 7 ب). گیرنده های مورد استفاده آنتن LEICA-GMX902 با نمونه برداری 20 هرتز می باشد. خروجی دو مریخ نورد سری زمانی RTK مختصات دکارتی جهانی گیرنده های نصب شده در سیستم مختصات WGS84 است. بنابراین، داده های مختصات جمع آوری شده برای تجزیه و تحلیل مشاهدات به BCS محلی تبدیل می شوند [ 41 ]. در این سیستم مختصات، محور X جهت ترافیک و محور Y جهت جانبی پل را نشان می دهد ( شکل 7).ب). تجزیه و تحلیل حرکات بر روی مختصات صفحه (X, Y) متمرکز است. این سیستم مختصات امکان ارزیابی عملکرد سازه را فراهم می کند و حرکت آن را در رابطه با جهت حرکت سازه توصیف می کند. در طول بازرسی پل در آگوست 2008، چندین الگوی آسیب در نزدیکی برج جنوبی شناسایی شد [ 39 ]. عملکرد دینامیکی پل بر اساس یک سیستم نظارت طولانی مدت مورد مطالعه قرار گرفته است. [ 39 ، 41 ، 42 ] را ببینید. علاوه بر این، کیفیت مشاهدات GPS در [ 41] مورد بحث قرار گرفته است]. اما در این قسمت مدل فیلترینگ در موارد آسیب دیده و سالم مورد ارزیابی قرار گرفته و عملکرد دینامیکی دو مورد برای GPS نصب شده بر روی برج جنوبی ارائه و مورد بحث قرار گرفته است.
دو روز برای ارزیابی روش فیلتر و عملکرد پل در موارد سالم و آسیب دیده انتخاب شده است، یعنی 30 دسامبر 2007 (سالم، H) و 16 ژوئن 2008 (آسیب دیده، D). مورد H پس از افتتاح پل پس از تعمیر و نگهداری آن در سپتامبر 2007 انتخاب می شود. مورد D بر اساس مطالعه قبلی [ 42 ] انتخاب شده است. خرابی پل قبل از این تاریخ رخ داده است. اندازهگیریهای GPS و سیگنالهای هموار شده با WPCA دو مورد در شکل 8 نشان داده شدهاند.. برای تشخیص اثر روش های نویز زدایی، از اندازه گیری جهت Y در حالت H برای ارزیابی نویزها در این جهت استفاده می شود. این جهت انتخاب شده است زیرا صلبیت برج در جهت Y زیاد است. انحراف استاندارد جهت Y برای سیگنال های مشاهده شده و هموار شده به ترتیب 2.73 و 2.52 میلی متر است. این نتیجه به این معنی است که روش WPCA فرکانس نمونه برداری بالای اندازه گیری های GPS را بهبود می بخشد و می تواند برای حذف خطاهای اندازه گیری استفاده شود. علاوه بر این، ضریب همبستگی بین سیگنال های مشاهده شده و هموار شده 0.92 است. با این حال، اشاره شده است که دقت اندازه گیری ها بدون از دست دادن اطلاعات در مورد حرکات پل افزایش یافته است. علاوه بر این، رفتار نیمه استاتیک پل در هر دو حالت در هر دو جهت قابل تشخیص است، همانطور که در شکل 8 نشان داده شده است.. بنابراین، نتیجه گیری می شود که روش WPCA می تواند برای تشخیص رفتار واقعی پل بدون از دست دادن اطلاعات در مورد حرکات پل استفاده شود.
مشاهدات مورد H نشان می دهد که حرکات جهت X دارای نویز هستند. حداکثر حرکات بدون نویز در جهت X و Y به ترتیب 24.75 و 8.15 میلی متر است. علاوه بر این، ضریب همبستگی بین حرکات دو جهت 0.01- است. این نتیجه به این معنی است که حرکات موثر برج در جهت ترافیک (X-جهت) اتفاق افتاده است، همانطور که در [ 41 ] بحث شد، و این نتیجه گیری تایید می کند که نویز نیز در این جهت رخ داده است. سایر مطالعات قبلی [ 9 ، 41 ، 42] به این نتیجه رسید که بارهای ترافیکی بارهای اصلی تأثیرگذار بر پل هستند. اندازهگیریهای GPS به وضوح نشان میدهند که پیکهای پیک ناشی از بارهای ترافیکی هستند. علاوه بر این، هر نقطه اوج اندازه گیری مربوط به زمانی است که ترافیک از پل عبور می کند. البته اشاره میشود که سیگنالهای هموار شده به حرکات نیمه استاتیک برج پل اشاره دارند و سیگنالهای باقیمانده به عملکرد دینامیکی که شامل اثرات بار ترافیکی و خطاهای GPS میشود، اشاره دارد. علاوه بر این، هیچ ارتباطی بین دو جهت مشاهده نمی شود. به این ترتیب، برج به دلیل صلبیت در جهت Y تحت تأثیر قرار نمی گیرد.
اندازه گیری مورد D نشان می دهد که حرکات جهت X و Y هر دو نویز دارند. حداکثر حرکات بدون نویز جهت X و Y به ترتیب 249.61 و 18.18 میلی متر است. ضریب همبستگی بین حرکات در دو جهت 0.45 است. این نتیجه بدین معنی است که حرکات آزاد برج در دو جهت را می توان در این مورد نتیجه گرفت. علاوه بر این، حداکثر حرکت دو جهت در یک زمان (2.2 ساعت) مشاهده می شود، همانطور که در شکل 8 نشان داده شده است.ب علاوه بر این، برخی از اشتباهات در آن زمان مشاهده می شود. بنابراین، روش WPCA سعی در برآورد داده های نادرست خواندن بر اساس مشاهدات قبلی داشت. مشاهدات پر سر و صدا به دلیل آسیب، بار ترافیک و خطاهای GPS رخ داده است. بر این اساس، در 31 جولای 2008، بارهای روی پل برای جلوگیری از ریزش آن محدود شد [ 39 ]. از طرفی مشاهده می شود که حرکات نیمه استاتیک در حالت H بیشتر از حالت D است. این نتیجه به این معنی است که آسیب بر رفتار پل در هر دو حالت استاتیک و دینامیک تأثیر می گذارد.
جهت X برای ارزیابی رفتار پل در دو حالت H و D انتخاب شده است. شکل 9 مولفه های دوره کوتاه دو مورد را نشان می دهد. علاوه بر این، اجزای فرکانس با استفاده از FFT و STFT ارائه می شوند. جدول 5 پارامترهای تجزیه و تحلیل آماری سری زمانی (مقادیر حداکثر مطلق (Max) و میانگین (M) و SD) را برای حرکات دوره کوتاه در هر دو مورد نشان می دهد. از شکل 9 الف و جدول 5، ضربه ناشی از اثرات ترافیکی به وضوح در مورد H نشان داده شده است. حرکات برج در مورد سالم پایدارتر از مورد آسیب دیده است، در حالی که حداکثر دامنه حرکتی برای موارد H و D به ترتیب 21.17 و 191.03 میلی متر است. علاوه بر این، دقت اندازهگیریهای دوره کوتاه مورد آسیبدیده نسبت به مورد سالم 70 درصد کاهش یافت. علاوه بر این، میانگین مطلق و حداکثر اندازه گیری های مورد آسیب دیده بیشتر از حالت سالم است.
مولفه های فرکانس دو مورد در شکل 9 b-d ارائه شده است. فرکانس های غالب برای موارد D و H به ترتیب 0.14 و 0.12 هرتز هستند. علاوه بر این، حالت های فرکانس را می توان تا 1 هرتز مشاهده و شناسایی کرد. مقادیر PSD برای فرکانس غالب به ترتیب 1.82 × 10-4 و 2.08 × 10-5 dB برای دو مورد است. علاوه بر این، مقادیر PSD در طول روز نظارت در مورد آسیب دیده بالا هستند، همانطور که در شکل 9 c,d نشان داده شده است، با یک جهش زیاد در جزء فرکانس. بنابراین، حالت سالم در هر دو مؤلفه زمان و فرکانس پایدارتر است.
4. خلاصه و نتیجه گیری
در این مطالعه، روشهای فیلترینگ و صافسازی غیرخطی برای تخمین روشی مناسب برای تشخیص اجزای حرکت سازههای با نرخ نمونهبرداری GPS فرکانس پایین و بالا استفاده میشود. روشهای غیرخطی RLS، EKF و WPCA برای مقایسه اثربخشی تکنیکهای صاف کردن و فیلتر کردن انتخاب شدهاند. دو مطالعه موردی ارائه و ارزیابی شده است. ابتدا پل راه آهن منصوره برای ارزیابی موارد بارگیری و تخلیه پل با فرکانس نمونه برداری GPS 1 هرتز انتخاب می شود. دوم، پل Yonghe برای ارزیابی موارد سالم و آسیب دیده پل با استفاده از فرکانس نمونه برداری GPS 20 هرتز انتخاب شده است. بر اساس نتایج روش های ارزیابی، نتایج زیر حاصل می شود:
روش WPCA نتایج بهتری را نشان می دهد و می تواند برای تشخیص پاسخ نیمه استاتیک سازه ها بدون از دست دادن اطلاعات در مورد رفتار سازه استفاده شود. علاوه بر این، تجزیه و تحلیل دامنه فرکانس پل ها نشان می دهد که عملکرد دینامیکی پل ها را می توان پس از تنظیم اندازه گیری GPS استخراج کرد. بنابراین، WPCA می تواند برای ارزیابی رفتار استاتیکی و دینامیکی پل های کوتاه و بلند با اندازه گیری های GPS با فرکانس نمونه برداری کم و بالا استفاده شود.
WPCA برای تشخیص رفتار واقعی پل منصوره در حوزه زمانی مناسب است. علاوه بر این، مورد بارگیری تحت تأثیر دقت اندازهگیریها قرار میگیرد، زیرا نویز و خطای دینامیکی اندازهگیریهای GPS را آلوده کرده است. حرکات صاف استخراج شده از پل نشان می دهد که می توان از GPS 1 هرتز برای تخمین اجزای حرکت نیمه استاتیک استفاده کرد. ارزیابی سری زمانی حرکات پل نشان می دهد که حداکثر حرکات در جهت Z در هر دو حالت بارگذاری با حرکات کوچک و ناچیز پل در هر دو حالت رخ داده است. این نتیجه به این معنی است که حرکت پل در زیر بار قطار ایمن است. علاوه بر این، سه جزء اول حالت فرکانس پل مبتنی بر سیستم مانیتورینگ GPS 1 هرتز، 0.105، 0.146 و 0.21 هرتز هستند. علاوه بر این،
اندازه گیری های سیستم مانیتورینگ GPS 20 هرتز در هر دو حالت مانیتورینگ پل یونگه، نویز بالایی را نشان می دهد. مشاهدات پر سر و صدا سیستم به دلیل آسیب، بار ترافیک و خطای GPS بود. ضریب همبستگی بین حرکات صفحه پل در حالت سالم کم است. علاوه بر این، حرکات جهت X و Y به ترتیب 90% و 55% افزایش یافت. علاوه بر این، آسیب بر رفتار پل در موارد استاتیک و دینامیک تأثیر می گذارد. مولفه های فرکانس دو مورد نشان می دهد که فرکانس های غالب برای موارد آسیب دیده و سالم به ترتیب 0.14 و 0.12 هرتز است. علاوه بر این، حالت های فرکانس را می توان تا 1 هرتز مشاهده و شناسایی کرد. علاوه بر این، PSD برای فرکانس غالب در طول روز نظارت در مورد آسیب دیده بالاتر است.
در نهایت می توان نتیجه گرفت که روش WPCA در هر دو فرکانس نمونه برداری کم و بالا از سیستم های مانیتورینگ GPS موثر است. علاوه بر این، تکنیکهای GPS با فرکانس نمونهبرداری پایین و بالا برای استخراج اجزای حرکت سازهها در حوزه زمان مناسب هستند، در حالی که ابزارهای GPS با فرکانس نمونهبرداری بالا برای تشخیص رفتار دینامیکی سازهها مناسب هستند.








بدون نظر