

خلاصه
رشد شهری ؛ شبیه سازی پویا ; اتوماتای سلولی ; رگرسیون حداقل مربعات جزئی (PLS) ; سیستم های اطلاعات جغرافیایی (GIS) ; تجزیه و تحلیل دقت
1. معرفی
2. مواد
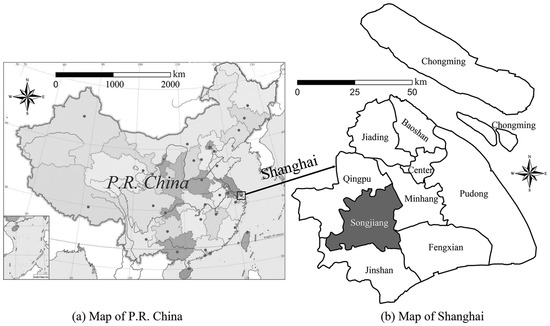
2.1. حوزه و داده های مطالعه
2.2. متغیرهای ورودی
3. مدل PLS-CA
3.1. یک مدل CA عمومی
احتمال تبدیل جهانی تبدیل زمین از غیر شهری به شهری را می توان به عنوان اثر ترکیبی احتمال استاتیک، اثر همسایگی، محدودیت ها و تاثیر تصادفی محاسبه کرد [ 9 ، 45 ]. یک شکل کلی از احتمالات تبدیل کلی برای سلول های u × v (در یک شبکه) به صورت زیر است:
جایی که پتیمن ج����احتمال جهانی تبدیل روستا به شهر برای سلول ij در زمان t است . پد��احتمال استاتیکی است که با فواصل مکانی تعیین می شود [ 11 ، 34 ]. con () یک تابع محدودیت است که 0 یا 1 را برمی گرداند [ 46 ]. پتیΩ ، من ج�Ω,���اثر سلول ij در زمان t در داخل استΩl × l Ω� × �همسایگی و محاسبه می شود پتیΩ ، من ج=∑l × l سی و نه (اسمن ج = تو بی آ ن ) _l × l − 1 �Ω,���=∑� × ����(��� = �����)� × �−1جایی که سی و نه (استیمن ج= s u i t a b l e )���(����=��������)اگر وضعیت سلول ij شهری باشد، 1 را برمیگرداند، در غیر این صورت، 0 را برمیگرداند. ( 1 + ( – ln ( R n d))β)(1+(−ln(���))�)عامل تصادفی [ 47 ] است، که در آن Rnd یک عدد واقعی تصادفی از 0 تا 1 است، و β�پارامتری از 0 تا 10 است که تأثیر عامل تصادفی را تنظیم می کند.
بنابراین، احتمال تبدیل جهانی شامل موارد زیر است: (1) احتمال تبدیل بر اساس متغیرهای فضایی، (2) محدودیتهای تبدیل سلولی از جمله مقررات برنامهریزی، زمینهای کشاورزی حفاظتشده و آب، (3) اثرات همسایگی، و (4) یک تصادفی عامل. اولین مؤلفه، احتمال تبدیل مشاهده شده Pd است [ 18 ، 41 ] :
جایی که α0+α1ایکس1+ … +αپایکسپ�0+�1�1+…+����نشان دهنده تأثیرات جامع متغیرهای مبتنی بر فاصله بر سلول ij است ، ایکسمن( i = 1 , … , p )ایکسمن(من=1،…،پ)فواصل سلول ij تا یک نقطه کلیدی مانند مرکز شهری، مراکز شهر، جاده های اصلی و غیره است. و آمن( i = 0 ، 1 ، … ، p )آمن(من=0،1،…،پ)پارامترهای مربوط به آنها هستند. این فواصل همچنین به عنوان متغیرهای فضایی یا مستقل در مدلسازی CA ما تعریف میشوند.
3.2. روش PLS
در رگرسیون PLS، هدف به دست آوردن اولین جفت بردار است تی1=E0w1تی1=�0�1و تو1=اف0ج1تو1=اف0ج1به شرطی که | |w1| | = 1||�1||=1و | |ج1| | = 1||ج1||=1، و به حداکثر رساندن تیتیمنتو1تیمنتیتو1. هدف را می توان به عنوان یک مسئله بهینه سازی دوباره نوشت [ 36 ، 37 ]:
با استفاده از الگوریتم لاگرانژ، معادلات مقدار ویژه را به دست آوردیم که اولین جفت بردار وزن را حل می کند. w1�1و ج1ج1به شرح زیر است:
جایی که w1�1و ج1ج1بردارهای ویژه واحد ماتریس ها هستند Eتی0اف0افتی0E0�0تیاف0اف0تی�0و افتی0E0Eتی0اف0اف0تی�0�0تیاف0، به ترتیب، θ21�12مقدار ویژه مربوطه است و θ1=افتی0Eتی0اف0ج1�1=اف0تی�0تیاف0ج1. طبق رابطه (1) θ1�1قرار است به معنای رگرسیون PLS حداکثر باشد.
ما اولین جفت بردارهای مؤلفه را محاسبه می کنیم تی1=E0w1تی1=�0�1و تو1=اف0ج1تو1=اف0ج1، و رگرسیون را اجرا کنید E0�0و اف0اف0با توجه به تی1تی1و تو1تو1، به ترتیب. معادله این است:
جایی که E1�1و اف1اف1ماتریس های باقیمانده هستند و پ1پ1و r1�1بردارهای ضرایبی هستند که می توان آنها را به صورت زیر بدست آورد:
جایگزینی ماتریس های باقیمانده E1�1و اف1اف1برای E0�0و اف0اف0و با تکرار روش فوق، بردارهای جزء دوم را به دست آوردیم تی2تی2و تو2تو2مانند:
جایی که w2�2و ج2ج2بردارهای ویژه واحد ماتریس ها هستند Eتی1اف1افتی1E1�1تیاف1اف1تی�1و افتی1E1Eتی1اف1،اف1تی�1�1تیاف1،به ترتیب، مربوط به حداکثر مقدار ویژه θ22�22.
اجرای رگرسیون از E1�1و اف1اف1با توجه به تی2تی2و تو2تو2به ترتیب داریم:
که در آن بردارهای ضریب پ2پ2و r2�2محاسبه می شود از:
این روش تا زمانی تکرار می شود E0�0تبدیل به یک ماتریس تهی و اجزای نهایی می شود تیمن( i = 1 , … , m )تیمن(من=1،…،متر)با اعتبارسنجی متقابل تعیین می شوند. بنابراین معادلات زیر را داریم:
از آنجا که تی1, … ,تیمترتی1،…،تیمتررا می توان به صورت ترکیب خطی متغیرهای اصلی نشان داد E01, … ,E0 ص�01،…،�0پ، و اف0اف0در معادله (10) با معادله رگرسیون بازیابی می شود y∗j=افo k( k = 1 ، … ، q)��*=اف�ک(ک=1،…،�)با توجه به ایکس∗j=Eo j( j = 1 , … , p ) ایکس�*=���(�=1،…،پ) به شرح زیر است:
جایی که αک1, … ,αکپ�ک1،…،�کپضرایب مربوطه هستند و F mk ستون k ماتریس باقیمانده F m است .
اعتبار سنجی متقابل مشارکت اجزای اصلی استخراج شده را بررسی می کند تا مشخص کند که مدل رگرسیون چقدر داده ها را پیش بینی می کند. اعتبار متقابل برای جزء t n به صورت زیر است:
که در آن PRESS h مجموع مربعات خطای پیشبینی با مجموع مولفههای h است ( t 1 ، …، t h )، و SS h -1 مجموع مربعهای خطای ترکیبی y با اولین ( h -1) است. اجزاء ( t 1 ، …، th – 1 ).
3.3. مدل CA مبتنی بر PLS
از آنجایی که احتمال تبدیل هر سلول در CA یک متغیر اعشاری منفرد است، معادله (11) را می توان به صورت [ 36 ، 37 ] دوباره نوشت :
جایی که αمن( i = 0 ، 1 ، … ، p )�من(من=0،1،…،پ)هست منتی ساعتمنتیساعتبرآوردگر رگرسیون
با ادغام معادلات (1)، (2) و (13)، احتمال تبدیل جهانی را در مدل PLS-CA استخراج کردیم:
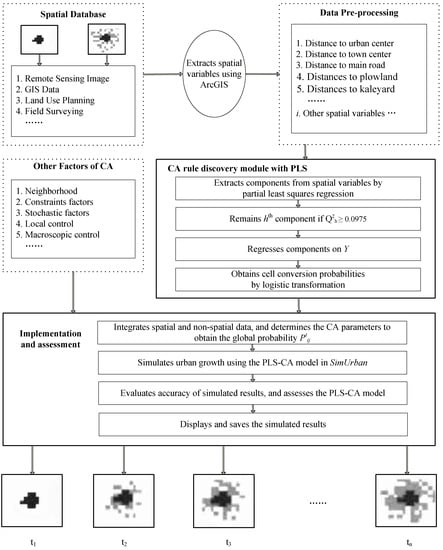
3.4. ساختار مدل PLS-CA
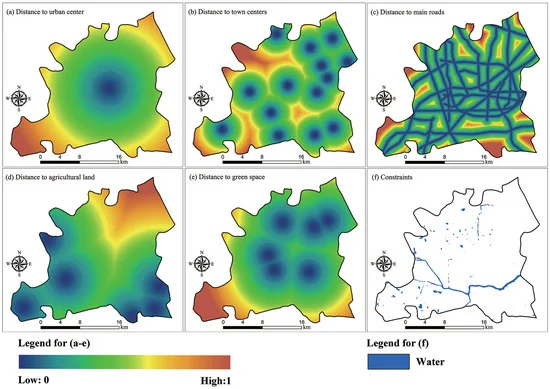
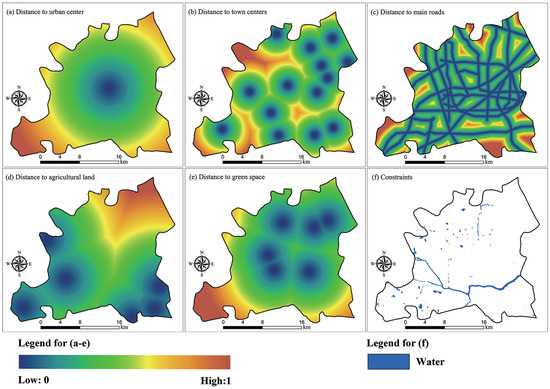
(2) پردازش داده ها: متغیرهای مکانی از داده های خام با استفاده از ابزار ArcGIS Spatial Analyst استخراج شدند. این متغیرهای فضایی شامل فاصله تا مرکز شهری ( D urban )، مراکز شهر ( D شهر )، جادههای اصلی ( D mrd )، زمین کشاورزی ( D agri ) و فضای سبز ( D gs ) بودند. پنج متغیر فضایی با استفاده از:
که در آن D max حداکثر مقدار متغیر فضایی است، D ori مقدار فاصله اصلی از داده های خام و D norm مقدار نرمال شده در محدوده (0، 1) است. عادی سازی تفسیر دقیقی از معنای جغرافیایی پارامترها را امکان پذیر می کند. به عنوان مثال، اگر سلولی در مرکز شهری قرار داشته باشد، مقدار شهری D نرمال شده آن 0 خواهد بود، در حالی که اگر سلول دور از مرکز شهری قرار گیرد، شهری عادی D آن به 1 نزدیک می شود.
مساحت شبیهسازیشده هر دسته از مدلسازی CA دقیقاً برابر با منطقه واقعی نبود. بنابراین، شاخصی به نام نرخ رشد شهری مقایسه شده ( CUGR ) برای ارزیابی دقت مدل PLS-CA با مقایسه نرخ رشد شهری مشاهده شده و شبیهسازی شده محاسبه میشود. شاخص CUGR به صورت زیر محاسبه شد:
که در آن CUGR تفاوت بین مناطق مشاهده شده و شبیه سازی شده هر دسته از نظر نرخ رشد است، S sim2008 منطقه شبیه سازی رده شهری یا غیر شهری در سال 2008 و S obs2008 مناطق آماری رشد شهری مشاهده شده در سال 2008 است. یا زیان غیر شهری در سال 92 به ترتیب.
4. نتایج و بحث
4.1. ارزیابی همبستگی
4.2. قوانین انتقال CA
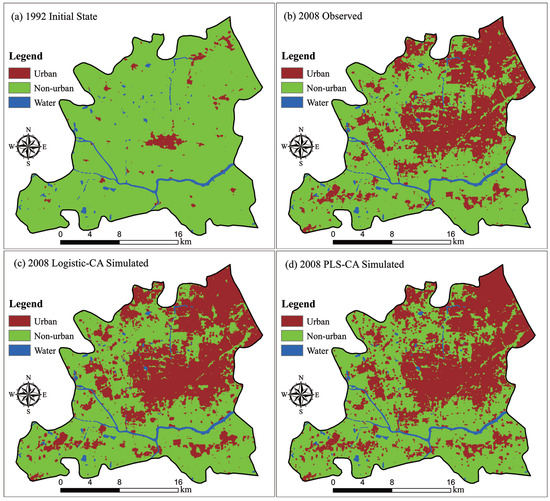
4.3. نتایج شبیه سازی
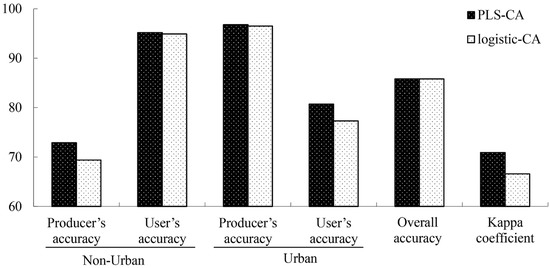
4.4. تجزیه و تحلیل دقت
4.5. بحث
5. نتیجه گیری ها
منابع
- موندال، بی. Das، DN; Bhatta، B. ادغام تکنیک های اتوماتای سلولی و مارکوف برای ایجاد سطح بالقوه توسعه شهری: مطالعه ای در مورد تراکم کلکته. ژئوکارتو بین المللی 2016 . [ Google Scholar ] [ CrossRef ]
- فنگ، ی. لیو، ی. باتی، ام. مدلسازی رشد شهری با خودکارهای سلولی مبتنی بر GIS و قوانین SVM حداقل مربعات: مطالعه موردی در منطقه Qingpu-Songjiang در شانگهای، چین. استوک. Env. Res. ارزیابی ریسک 2016 ، 30 ، 1387–1400. [ Google Scholar ] [ CrossRef ]
- باردو، جی. کاسانکو، م. مک کورمیک، ن. Lavalle، C. مدلسازی فرآیندهای فضایی پویا: شبیهسازی سناریوهای آینده شهری از طریق اتوماتای سلولی. Landsc. طرح شهری. 2003 ، 64 ، 145-160. [ Google Scholar ] [ CrossRef ]
- Jantz، CA; گوتز، اس جی. شلی، MK با استفاده از مدل رشد شهری SLEUTH برای شبیهسازی اثرات سناریوهای سیاست آتی بر استفاده از زمین شهری در منطقه شهری بالتیمور-واشنگتن. محیط زیست طرح. B 2004 , 31 , 251-271. [ Google Scholar ] [ CrossRef ]
- Tobler، W. جغرافیای سلولی. در فلسفه در جغرافیا ; Springer: برلین، آلمان، 1979; صص 379-386. [ Google Scholar ]
- باتی، م. زی، ی. Sun، Z. مدلسازی دینامیک شهری از طریق اتوماتای سلولی مبتنی بر GIS. محاسبه کنید. محیط زیست شهری 1999 ، 23 ، 205-233. [ Google Scholar ] [ CrossRef ]
- وربورگ، پی اچ. Schot، PP; Dijst، MJ; ولدکمپ، الف. مدلسازی تغییر کاربری اراضی: اولویتهای تحقیق و تمرین فعلی. ژئوژورنال 2004 ، 61 ، 309-324. [ Google Scholar ] [ CrossRef ]
- Batty, M. Cities and Complexity: Understanding Cities with Cellular Automata, Agent-based Models, and Fractals . انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 2007. [ Google Scholar ]
- کلارک، کی سی; Gaydos، LJ اتصال شل یک مدل خودکار سلولی و GIS: پیشبینی رشد شهری بلندمدت برای سانفرانسیسکو و واشنگتن/بالتیمور. بین المللی جی. جئوگر. Inf. علمی 1998 ، 12 ، 699-714. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، ایکس. بله، AG-O. مدلسازی توسعه شهری پایدار با ادغام اتوماتای سلولی محدود و GIS بین المللی جی. جئوگر. Inf. علمی 2000 ، 14 ، 131-152. [ Google Scholar ] [ CrossRef ]
- Wu, F. کالیبراسیون اتوماتای سلولی تصادفی: کاربرد برای تبدیل زمین روستایی به شهری. بین المللی جی. جئوگر. Inf. علمی 2002 ، 16 ، 795-818. [ Google Scholar ] [ CrossRef ]
- کائو، ک. باتی، م. هوانگ، بی. لیو، ی. یو، ال. چن، جی. بهینهسازی کاربری زمین چندهدفه فضایی: برنامههای افزودنی به الگوریتم ژنتیک مرتبسازی غیرمسلط-II. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1949-1969. [ Google Scholar ] [ CrossRef ]
- کائو، ام. بنت، اس جی؛ شن، Q. Xu, R. یک رویکرد الهام گرفته از خفاش برای تعریف قوانین انتقال برای یک مدل خودکار سلولی که برای شبیهسازی گسترش شهری استفاده میشود. بین المللی جی. جئوگر. Inf. علمی 2016 ، 30 ، 1-19. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. لیو، ی. پیشبینی سناریوی شهر ساحلی در حال ظهور با استفاده از مدلسازی CA تحت شرایط مختلف محیطی: مطالعه موردی شهر جدید لینگانگ، چین. محیط زیست نظارت کنید. ارزیابی کنید. 2016 ، 188 ، 540. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لیو، ایکس. ما، ال. لی، ایکس. آی، بی. لی، اس. او، Z. شبیه سازی رشد شهری با ادغام شاخص گسترش چشم انداز (LEI) و اتوماتای سلولی. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 148-163. [ Google Scholar ] [ CrossRef ]
- لیو، ی. فنگ، ی. شبیه سازی تاثیر استراتژی های اقتصادی و زیست محیطی بر سناریوهای رشد شهری آینده در نینگبو، چین. پایداری 2016 ، 8 ، 1045. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لی، ایکس. شی، ایکس. ژانگ، ایکس. Chen, Y. شبیه سازی پویایی کاربری زمین تحت سیاست های برنامه ریزی با ادغام سیستم های ایمنی مصنوعی با اتوماتای سلولی. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 783-802. [ Google Scholar ] [ CrossRef ]
- لیو، ی. فنگ، Y. یک مدل اتوماتای سلولی مبتنی بر لجستیک برای شبیهسازی رشد مداوم شهری: مطالعه موردی شهر ساحل طلایی، استرالیا. در مدل های عامل محور سیستم های جغرافیایی ; Springer: برلین، آلمان، 2012; صص 643-662. [ Google Scholar ]
- لیائو، جی. تانگ، ال. شائو، جی. کیو، کیو. وانگ، سی. ژنگ، اس. Su، X. یک رویکرد اتوماتای سلولی فروپاشی همسایه برای شبیه سازی گسترش شهری بر اساس هوش ازدحام ذرات. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 720-738. [ Google Scholar ] [ CrossRef ]
- Verstegen، JA; کارسنبرگ، دی. وان درهیلست، اف. Faaij, AP شناسایی خودکار سلولی تغییر کاربری زمین توسط همسان سازی داده بیزی. محیط زیست مدل. نرم افزار 2014 ، 53 ، 121-136. [ Google Scholar ] [ CrossRef ]
- لی، ایکس. بله، AG-O. اتوماتای سلولی مبتنی بر شبکه عصبی برای شبیه سازی تغییرات کاربری چندگانه با استفاده از GIS. بین المللی جی. جئوگر. Inf. علمی 2002 ، 16 ، 323-343. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. لیو، ی. یک رویکرد اتوماتای سلولی اکتشافی برای مدلسازی تغییر کاربری زمین شهری بر اساس بازپخت شبیهسازی شده. بین المللی جی. جئوگر. Inf. علمی 2013 ، 27 ، 449-466. [ Google Scholar ] [ CrossRef ]
- لیو، ی. تانگ، دبلیو. او، جی. لیو، ی. آی، تی. لیو، دی. یک مدل بهینهسازی فضایی کاربری زمین بر اساس بهینهسازی ژنتیکی و نظریه بازی. محاسبه کنید. محیط زیست شهری 2015 ، 49 ، 1-14. [ Google Scholar ] [ CrossRef ]
- کاموسوکو، سی. گامبا، ج. شبیه سازی رشد شهری با استفاده از مدل تصادفی جنگل سلولی اتوماتای (RF-CA). ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 447-470. [ Google Scholar ] [ CrossRef ]
- تریانتاکونستانتیس، دی. Mountrakis، G. پیش بینی رشد شهری: مروری بر مدل های محاسباتی و ادراکات انسانی. جی. جئوگر. Inf. سیستم 2012 ، 4 ، 26323. [ Google Scholar ] [ CrossRef ]
- کائو، ک. هوانگ، بی. لی، ام. لی، دبلیو. کالیبراسیون یک مدل اتوماتای سلولی برای درک تبدیل زمین روستایی به شهری: یک رویکرد بهینهسازی چند هدفه مبتنی بر جلوی پارتو. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 1028-1046. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. Liu، Y. یک مدل اتوماتای سلولی بهینه بر اساس الگوریتم ژنتیک تطبیقی برای شبیهسازی رشد شهری. در پیشرفت در مدیریت داده های مکانی و GIS ; Springer: برلین، آلمان، 2012; صص 27-38. [ Google Scholar ]
- فنگ، ی. لیو، ی. تانگ، ایکس. لیو، ام. دنگ، اس. مدلسازی رشد شهری پویا با استفاده از اتوماتای سلولی و قوانین بهینهسازی ازدحام ذرات. Landsc. طرح شهری. 2011 ، 102 ، 188-196. [ Google Scholar ] [ CrossRef ]
- گوان، دی. لی، اچ. اینوهه، تی. سو، دبلیو. نگائی، تی. هوکائو، ک. مدلسازی تغییر کاربری زمین شهری با ادغام خودکار سلولی و مدل مارکوف. Ecol. مدل. 2011 ، 222 ، 3761-3772. [ Google Scholar ] [ CrossRef ]
- یانگ، ایکس. ژنگ، X.-Q. Lv، L.-N. یک مدل فضایی-زمانی تغییر کاربری زمین بر اساس بهینهسازی کلنی مورچهها، زنجیره مارکوف و اتوماتای سلولی Ecol. مدل. 2012 ، 233 ، 11-19. [ Google Scholar ] [ CrossRef ]
- منشی، تی. زویجست، ام. بروکسل، ام. van Maarseveen، M. رگرسیون لجستیک و مدل سازی مبتنی بر اتوماتای سلولی توسعه خرده فروشی، تجاری و مسکونی در شهر احمدآباد، هند. شهرها 2014 ، 39 ، 68-86. [ Google Scholar ] [ CrossRef ]
- القرشی، اف. کومار، ال. الغامدی، KA مدل سازی فضایی-زمانی پیش بینی های رشد شهری بر اساس عوامل نیروی محرکه در پنج شهر عربستان سعودی. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 139. [ Google Scholar ] [ CrossRef ]
- لین، ی.-پی. چو، اچ.-ج. وو، سی.-ف. وربورگ، PH توانایی پیشبینی رگرسیون لجستیک، رگرسیون لجستیک خودکار و مدلهای شبکه عصبی در مدلسازی تجربی تغییر کاربری زمین – مطالعه موردی. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 65-87. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، ایکس. بله، AG-O. شبیه سازی شهری با استفاده از تجزیه و تحلیل اجزای اصلی و اتوماتای سلولی برای برنامه ریزی کاربری زمین فتوگرام مهندس Remote Sens. 2002 , 68 , 341-352. [ Google Scholar ]
- دان، دبلیو. اسکات، دی. Glen, W. تجزیه و تحلیل مؤلفه های اصلی و رگرسیون حداقل مربعات جزئی. محاسبات چهار وجهی روش 1989 ، 2 ، 349-376. [ Google Scholar ] [ CrossRef ]
- گلادی، پ. کوالسکی، BR رگرسیون حداقل مربعات جزئی: یک آموزش. مقعدی چیم. Acta 1986 ، 185 ، 1-17. [ Google Scholar ] [ CrossRef ]
- عبدی، ح. رگرسیون حداقل مربعات جزئی (رگرسیون PLS). دایره Res. Soc. Soc. علمی 2003 ، 2003 ، 792-795. [ Google Scholar ]
- دنگ، ایکس. هوانگ، جی. روزل، اس. اوچیدا، E. رشد، جمعیت و صنعتی شدن، و گسترش زمین شهری چین. J. شهری اقتصاد. 2008 ، 63 ، 96-115. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. بعد فراکتال لیو، ی. به عنوان شاخصی برای تعیین کمیت اثرات تغییر مقیاس های فضایی بر معیارهای منظر. Ecol. اندیک. 2015 ، 53 ، 18-27. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. لیو، ی. لیو، ی. ارزیابی صریح فضایی امنیت اکولوژیکی زمین با متغیرهای فضایی و مدلسازی رگرسیون لجستیک در شانگهای، چین. استوک. محیط زیست Res. ارزیابی ریسک 2016 . [ Google Scholar ] [ CrossRef ]
- وو، اف. Webster, CJ شبیه سازی توسعه زمین از طریق ادغام اتوماتای سلولی و ارزیابی چند معیاره. محیط زیست طرح. B 1998 ، 25 ، 103-126. [ Google Scholar ] [ CrossRef ]
- وایت، آر. Engelen، G. اتوماتای سلولی به عنوان اساس مدل سازی منطقه ای پویا یکپارچه. محیط زیست طرح. B 1997 ، 24 ، 235-246. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. لیو، ی. لیو، دی. نقشه برداری خط ساحلی با اتوماتای سلولی و تجزیه و تحلیل توسعه خط ساحلی در شانگهای، چین از سال 1979 تا 2008. عرب. جی. ژئوشی. 2015 ، 8 ، 4337-4351. [ Google Scholar ] [ CrossRef ]
- او، سی. اوکادا، ن. ژانگ، Q. کشتی.؛ Zhang، J. مدلسازی سناریوهای گسترش شهری با جفت کردن مدل اتوماتای سلولی و مدل پویا سیستم در پکن، چین. Appl. Geogr. 2006 ، 26 ، 323-345. [ Google Scholar ] [ CrossRef ]
- بلسیچ، آی. چکینی، آ. Trunfio، GA چقدر گذشته برای دیدن آینده: یک مطالعه محاسباتی در کالیبراسیون اتوماتای سلولی شهری. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 349-374. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. لیو، ی. یک مدل اتوماتای سلولی مبتنی بر تجزیه و تحلیل اجزای اصلی هسته غیرخطی برای شبیهسازی رشد شهری. محیط زیست طرح. B 2013 ، 40 ، 117-134. [ Google Scholar ] [ CrossRef ]
- گارسیا، AM; سانته، آی. کرسنت، آر. میراندا، دی. تجزیه و تحلیل اثر مولفه تصادفی مدلهای اتوماتای سلولی شهری. محاسبه کنید. محیط زیست شهری 2011 ، 35 ، 289-296. [ Google Scholar ] [ CrossRef ]
- تیم اصلی R. R: زبان و محیطی برای محاسبات آماری . بنیاد R برای محاسبات آماری: وین، اتریش، 2013. [ Google Scholar ]
- کلارک، کی سی; هاپن، اس. Gaydos, L. یک مدل خودکار سلولی خود اصلاح شونده شهرنشینی تاریخی در منطقه خلیج سانفرانسیسکو. محیط زیست طرح. B 1997 ، 24 ، 247-261. [ Google Scholar ] [ CrossRef ]
- آلمیدا، سی. گلریانی، ج. کاستیون، EF; Soares-Filho, B. استفاده از شبکههای عصبی و اتوماتای سلولی برای مدلسازی دینامیک کاربری زمین درون شهری. بین المللی جی. جئوگر. Inf. علمی 2008 ، 22 ، 943-963. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لی، ایکس. لیو، ال. او، جی. Ai, B. رویکردی از پایین به بالا برای کشف قوانین انتقال اتوماتای سلولی با استفاده از هوش مورچه. بین المللی جی. جئوگر. Inf. علمی 2008 ، 22 ، 1247-1269. [ Google Scholar ] [ CrossRef ]
- کمپبل، جی بی. Wynne, RH مقدمه ای بر سنجش از دور . Guilford Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- لیو، ی. مدلسازی توسعه شهری با سیستم های اطلاعات جغرافیایی و اتوماتای سلولی . CRC Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- بله، AG-O. Li، X. خطاها و عدم قطعیت ها در اتوماتای سلولی شهری. محاسبه کنید. محیط زیست شهری 2006 ، 30 ، 10-28. [ Google Scholar ] [ CrossRef ]
- منارد، آ. Marceau، DJ کاوش حساسیت مقیاس فضایی در اتوماتای سلولی جغرافیایی. محیط زیست طرح. B 2005 ، 32 ، 693-714. [ Google Scholar ] [ CrossRef ]
- وانگ، اف. حسنی، ج.غ. وانگ، ایکس. Marceau, DJ شناسایی عوامل غالب برای کالیبراسیون یک مدل اتوماتای سلولی کاربری زمین با استفاده از نظریه مجموعه خشن. محاسبه کنید. محیط زیست شهری 2011 ، 35 ، 116-125. [ Google Scholar ] [ CrossRef ]
- وربورگ، پی اچ. de Nijs، TC; ون اک، جی آر. ویسر، اچ. دی جونگ، ک. روشی برای تجزیه و تحلیل ویژگی های همسایگی الگوهای کاربری زمین. محاسبه کنید. محیط زیست Urban 2004 , 28 , 667-690. [ Google Scholar ] [ CrossRef ]
- پان، ی. راث، ا. یو، ز. Doluschitz, R. تاثیر تنوع در مقیاس بر رفتار اتوماتای سلولی مورد استفاده برای مدلسازی تغییر کاربری زمین. محاسبه کنید. محیط زیست شهری 2010 ، 34 ، 400-408. [ Google Scholar ] [ CrossRef ]
- فنگ، ی. یانگ، کیو. هنگ، ز. Cui، L. مدلسازی تغییر کاربری زمینهای ساحلی با ترکیب خودهمبستگی فضایی در مدلهای اتوماتای سلولی. ژئوکارتو بین المللی 2016 ، 1–44. [ Google Scholar ] [ CrossRef ]


© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر