

خلاصه
وسیله نقلیه هوایی بدون سرنشین (UAV) ؛ فرسایش خندقی ; مناطق آسیب دیده خندق ؛ تجزیه و تحلیل تصویر مبتنی بر شی ; جنگل تصادفی ; فلات لس
1. معرفی
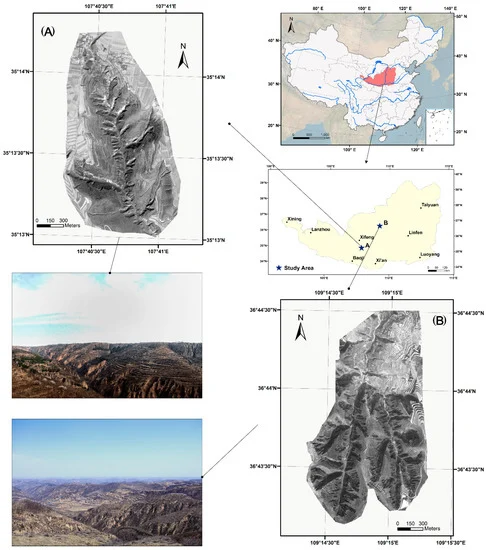
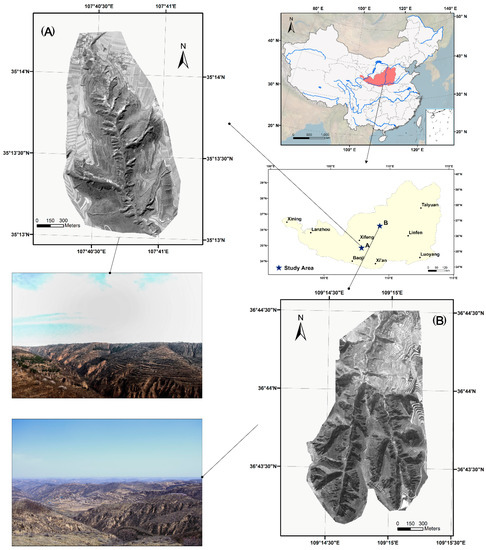
2. منطقه مطالعه
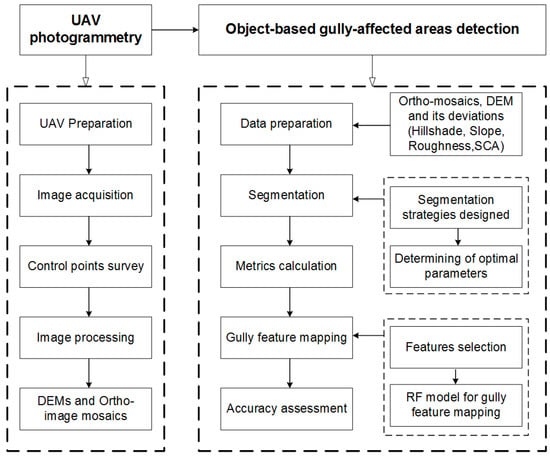
3. روش
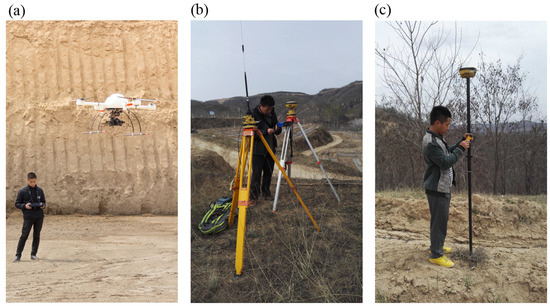
3.1. اکتساب داده مبتنی بر پهپاد
3.1.1. توضیحات پهپاد
3.1.2. نظرسنجی در فضای باز
3.1.3. پردازش تصویر داخلی
3.1.4. ارزیابی دقت
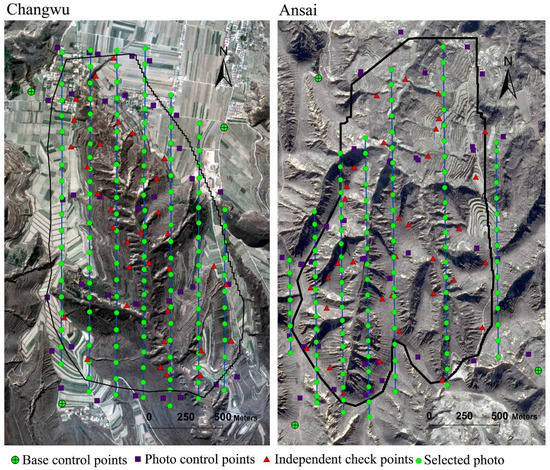
برای بررسی صحت داده های DEM، به برخی از نقاط حقیقت زمینی مستقل نیاز است. داده های پیوسته مکانی مناسب ترین گزینه ها هستند [ 61 ]; با این حال، هیچ داده مرجعی برای منطقه مورد مطالعه انتخاب شده با چنین الزامات وضوح بالا در دسترس نیست. در عوض، برخی از نقاط چک مستقل (ICP) با 33 ICP در Changwu و 37 ICP در Ansai مورد بررسی قرار گرفتند. با توجه به الزامات پایش خندق ها، اکثر این نقاط در امتداد خطوط مرزی خندق انتخاب شدند ( شکل 4).). اندازهگیریهای ICP شبیه به اندازهگیریهای GCP بود. خطای عمودی با تفاوت بین ارتفاع ICPها و داده های DEM محاسبه شد. انحراف افقی با اندازه گیری جابجایی بین ICPs و ارتو موزاییک محاسبه شد. RMSE برای ارزیابی دقت طبق رابطه (1) استفاده شد:
که در آن Z di i- مین مقدار اندازه گیری شده از DEM یا ortho-mosaics است و Zri داده مرجع مربوطه از ICPها است.
3.2. تشخیص نواحی متاثر از خندق مبتنی بر شی
3.2.1. آماده سازی داده ها
3.2.2. تقسیم بندی
در این مطالعه، مقیاس، شکل و فشردگی همگی برای تعیین مناسبترین ترکیب پارامتر در نظر گرفته شدند. ابتدا، ارزیابی بصری، که می تواند هزینه زمانی را کاهش دهد، برای تعیین محدوده احتمالی هر پارامتر استفاده شد ( جدول 1 ). دوم، ESP-Tool برای هر ترکیب پارامتر استفاده شد. هر مقدار مقیاس حذف شده در محدوده می تواند برای بررسی بیشتر ذخیره شود. سوم، خوب بودن بخشبندی با استفاده از معیارهای زیر ارزیابی شد: زیربخشبندی، بیشبخشبندی و فاصله اقلیدسی [ 73 ، 74 ]:
که r داده مرجع و s مجموعه داده تقسیم بندی است. OR و UR معیارهای مبتنی بر ناحیه هستند که درجه تطابق بین نتایج واقعی و تقسیمبندی را توصیف میکنند. ED معیارهای ترکیبی است که می تواند به عنوان “نزدیک بودن” به نتیجه تقسیم بندی ایده آل در نظر گرفته شود.
3.2.3. طبقه بندی تصویر: RF
4. نتایج
4.1. DEM و Ortho-Mosaics Generation
4.2. شناسایی مناطق آسیب دیده خندق
5. بحث
5.1. مقایسه با مطالعات موجود
5.2. محدودیت های استفاده از پهپاد در منطقه تپه لوس
6. نتیجه گیری
منابع
- وانگ، بی. ژنگ، اف. Römkens، MJM; Darboux، F. فرسایش پذیری خاک برای فرسایش آبی: دیدگاه و تجربیات چینی. ژئومورفولوژی 2013 ، 187 ، 1-10. [ Google Scholar ] [ CrossRef ]
- دی ونته، جی. پوسن، جی. پیشبینی فرسایش خاک و عملکرد رسوب در مقیاس حوضه: مسائل مقیاس و مدلهای نیمه کمی. علوم زمین Rev. 2005 , 71 , 95-125. [ Google Scholar ] [ CrossRef ]
- لونگونی، ال. پاپینی، م. برامبیلا، دی. بارازتی، ال. Roncoroni، F. اسکایونی، م. ایوانف، VI پایش فرسایش سواحل رودخانه در حوضه های آبریز کوهستانی با استفاده از اسکن لیزری زمینی. Remote Sens. 2016 , 8 , 241. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فو، بی جی؛ ژائو، WW; چن، LD; ژانگ، QJ; Lv، YH; گولینک، اچ. پوسن، جی. ارزیابی فرسایش خاک در مقیاس بزرگ حوضه با استفاده از RUSLE و GIS: مطالعه موردی در فلات لس چین. تخریب زمین توسعه دهنده 2005 ، 16 ، 73-85. [ Google Scholar ] [ CrossRef ]
- لیو، ک. تانگ، جی. جیانگ، ال. زو، تبر; یانگ، جی. آهنگ، XD محاسبه در مقیاس منطقه ای عامل LS با استفاده از پردازش موازی. محاسبه کنید. Geosci. 2015 ، 78 ، 110-122. [ Google Scholar ] [ CrossRef ]
- پوسن، جی. Nachtergaele, J.; ورستراتن، جی. والنتین، سی. فرسایش خندقی و تغییرات محیطی: اهمیت و نیازهای پژوهشی. کاتنا 2003 ، 50 ، 91-133. [ Google Scholar ] [ CrossRef ]
- کاستیو، سی. گومز، JA یک قرن تحقیق در مورد فرسایش خندقی: فوریت، پیچیدگی و رویکردهای مطالعه. علوم زمین Rev. 2016 , 160 , 300-319. [ Google Scholar ] [ CrossRef ]
- Maugnard، A. کوردونیه، اچ. درجه، ا. دیمارسین، پی. پینوکس، ن. Bielders، CL ارزیابی عدم قطعیت شناسایی زودگذر خندق، ویژگی ها و آستانه توپوگرافی هنگام استفاده از عکس های هوایی در تنظیمات کشاورزی. زمین گشت و گذار. روند. Landf. 2014 ، 39 ، 1319-1330. [ Google Scholar ] [ CrossRef ]
- ژورچسکو، ام. Grecu، F. مدل سازی وقوع خندق ها در دو مقیاس فضایی در حوضه زهکشی Olteţ (رومانی). نات خطرات 2015 ، 79 ، 255-289. [ Google Scholar ] [ CrossRef ]
- ژانگ، جنوب غربی؛ لی، اف. لی، TQ; یانگ، جی سی. بو، ک. چانگ، LP; وانگ، WJ; یان، YC نظارت سنجش از دور خندقها در مقیاس منطقهای: مطالعه موردی منطقه Kebai در استان Heilongjiang، چین. چانه. Geogr. علمی 2015 ، 25 ، 602-611. [ Google Scholar ] [ CrossRef ]
- کازالی، جی. لوپز، جی جی. گیرالدز، JV فرسایش خندقی زودگذر در جنوب ناوارا (اسپانیا). کاتنا 1999 ، 36 ، 65-84. [ Google Scholar ] [ CrossRef ]
- کازالی، جی. لویزو، جی. Campo، MA; De Santisteban، LM دقت روشهای ارزیابی میدانی فرسایش آبکندی و زودگذر. کاتنا 2006 ، 67 ، 128-138. [ Google Scholar ] [ CrossRef ]
- کوچیوبا، دبلیو. جانیکی، جی. رودزیک، جی. Stępniewski، K. مقایسه روشهای حجمی و سنجش از دور (TLS) برای ارزیابی توسعه یک خندق لس جنگلی دائمی. نات خطرات 2015 ، 79 ، 139-158. [ Google Scholar ] [ CrossRef ]
- کنر، آر. بوهلر، ی. دلالوی، آر. گینزلر، سی. فیلیپس، ام. نظارت بر حرکات توده بالا آلپ با ترکیب اسکن لیزری با فتوگرامتری دیجیتالی هوابرد. ژئومورفولوژی 2014 ، 206 ، 492-504. [ Google Scholar ] [ CrossRef ]
- گیمنز، آر. مارزولف، آی. Campo، MA; سیگر، م. Ries، JB; کازالی، جی. Álvarez-Mozos، J. دقت اندازهگیریهای فتوگرامتری با وضوح بالا خندقها با مورفولوژی متضاد. زمین گشت و گذار. روند. Landf. 2009 ، 34 ، 1915-1926. [ Google Scholar ] [ CrossRef ]
- کاستیو، سی. پرز، آر. جیمز، MR; کوینتون، JN; تاگواس، EV; گومز، JA مقایسه دقت چند روش میدانی برای اندازهگیری فرسایش خندقی. علم خاک Soc. صبح. J. 2012 , 76 , 1319–1332. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هوهنتال، جی. آلهو، پی. Hyyppä، J.; Hyyppä، H. کاربردهای اسکن لیزری در مطالعات رودخانه ای. Prog. فیزیک Geogr. 2011 ، 35 ، 782-809. [ Google Scholar ] [ CrossRef ]
- برمر، ام. Sass, O. ترکیب اسکن لیزری هوابرد و زمینی برای تعیین کمیت فرسایش و رسوب توسط یک رویداد جریان زباله. ژئومورفولوژی 2012 ، 138 ، 49-60. [ Google Scholar ] [ CrossRef ]
- گودوین، NR; آرمستون، جی. استیلر، آی. Muir, J. ارزیابی تکرارپذیری اسکن لیزری زمینی برای نظارت بر توپوگرافی آبکند: مطالعه موردی از آراتولا، کوئینزلند، استرالیا. ژئومورفولوژی 2016 ، 262 ، 24-36. [ Google Scholar ] [ CrossRef ]
- Heritage, GL; Hetherington، D. به سوی یک پروتکل برای اسکن لیزری در ژئومورفولوژی رودخانه. زمین گشت و گذار. روند. Landf. 2007 ، 32 ، 66-74. [ Google Scholar ] [ CrossRef ]
- هوفل، بی. گریسبام، ال. Forbriger، M. تشخیص خندقها مبتنی بر GIS در دادههای LiDAR زمینی Cerro Llamoca Peatland (پرو). Remote Sens. 2013 ، 5 ، 5851–5870. [ Google Scholar ] [ CrossRef ]
- Vrieling، A. سنجش از دور ماهواره ای برای ارزیابی فرسایش آب: بررسی. Catena 2006 ، 65 ، 2-18. [ Google Scholar ] [ CrossRef ]
- لی، دی. که، ی. گونگ، اچ. Li، X. طبقه بندی گونه های درختی شهری مبتنی بر شی با استفاده از تصاویر Bi-Temporal WorldView-2 و WorldView-3. Remote Sens. 2015 ، 7 ، 16917–16937. [ Google Scholar ] [ CrossRef ]
- استامف، ا. Malet، JP; علامند، پ. Ulrich, P. بازسازی سطح و اندازه گیری جابجایی زمین لغزش با تصاویر ماهواره ای Pléiades. ISPRS J. Photogramm. 2014 ، 95 ، 1-12. [ Google Scholar ] [ CrossRef ]
- چن، جی. داومن، آی. لی، اس. Li، ZL; مدن، م. میلز، جی. پاپرودیتیس، ن. روتنشتاینر، اف. سستر، ام. توث، سی. و همکاران اطلاعات از تصاویر: بینش علمی و دستور کار تحقیقاتی ISPRS. ISPRS J. Photogramm. 2016 ، 115 ، 3-21. [ Google Scholar ] [ CrossRef ]
- وانگ، RH; ژانگ، جنوب غربی؛ یانگ، جی سی. Pu، LM; یانگ، CB; یو، LX; چانگ، LP; Bu، K. استفاده یکپارچه از GCM، RS، و GIS برای ارزیابی شیب تپه و فرسایش خندقی در حوضه فرعی رودخانه موشی، شمال شرقی چین. پایداری 2016 ، 8 ، 317. [ Google Scholar ] [ CrossRef ]
- وانگ، RH; ژانگ، جنوب غربی؛ Pu، LM; یانگ، جی سی. یانگ، CB; چن، جی. گوان، سی. وانگ، کیو. چن، دی. فو، BL; و همکاران نقشه برداری و پایش فرسایش خندقی در مقیاس های چندگانه بر اساس داده های سنجش از دور چند منبعی حوضه آبریز رودخانه سانچا، شمال شرقی چین. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 200. [ Google Scholar ] [ CrossRef ]
- کورنوس، دبلیو. علموس، ر. رویز، ا. تولید Talaya، J. DEM از SPOT-5 3 برابر در طول مسیر تصاویر استریوسکوپی با استفاده از کالیبراسیون خودکار. ISPRS J. Photogramm. 2006 ، 60 ، 147-159. [ Google Scholar ] [ CrossRef ]
- مرکر، ام. Quénéhervé، G. باکوفر، اف. موری، S. یک روش ارزیابی ساده DEM برای تجزیه و تحلیل سیستم خندقی در منطقه دریاچه مانیارا، شمال تانزانیا. نات خطرات 2015 ، 79 ، 235-253. [ Google Scholar ] [ CrossRef ]
- وایتهد، کی. Hugenholtz، CH سنجش از دور محیط با سیستمهای هواپیمای بدون سرنشین کوچک (UAS)، بخش 1: مروری بر پیشرفت و چالشها. J. بدون سرنشین Veh. سیستم 2014 ، 2 ، 69-85. [ Google Scholar ] [ CrossRef ]
- کلومینا، آی. Molina, P. سیستم های هوایی بدون سرنشین برای فتوگرامتری و سنجش از دور: یک بررسی. ISPRS J. Photogramm. 2014 ، 92 ، 79-97. [ Google Scholar ] [ CrossRef ]
- D’Oleire-Oltmanns، S. مارزولف، آی. پیتر، KD; ریس، وسیله نقلیه هوایی بدون سرنشین JB (UAV) برای نظارت بر فرسایش خاک در مراکش. Remote Sens. 2012 , 4 , 3390–3416. [ Google Scholar ] [ CrossRef ]
- التنر، ا. باومگارت، پ. ماس، HG; Faust, D. دادههای پهپاد چند زمانی برای اندازهگیری خودکار فرسایش شیاری و بینشیاری در خاک لس. زمین گشت و گذار. روند. لانف. 2015 ، 40 ، 741-755. [ Google Scholar ] [ CrossRef ]
- Gonçalves، JA; Henriques, R. فتوگرامتری پهپاد برای پایش توپوگرافی مناطق ساحلی. ISPRS J. Photogramm. 2015 ، 104 ، 101-111. [ Google Scholar ] [ CrossRef ]
- گونزالس-دوگو، وی. زارکو-تجادا، پ. نیکلاس، ای. نورتس، PA; آلارکون، جی جی؛ Intrigliolo، DS; Fereres، E. استفاده از تصاویر حرارتی پهپاد با وضوح بالا برای ارزیابی تغییرپذیری در وضعیت آب پنج گونه درخت میوه در یک باغ تجاری. دقیق کشاورزی 2013 ، 14 ، 660-678. [ Google Scholar ] [ CrossRef ]
- Immerzeel، WW; Kraaijenbrink، PDA; شی، جی.ام. شرستا، AB; پلیچیوتی، اف. Bierkens، MFP; de Jong, SM پایش با وضوح بالا دینامیک یخچالهای طبیعی هیمالیا با استفاده از وسایل نقلیه هوایی بدون سرنشین. سنسور از راه دور محیط. 2014 ، 150 ، 93-103. [ Google Scholar ] [ CrossRef ]
- لوسییر، آ. دی یونگ، اس. ترنر، دی. نقشه برداری جابجایی زمین لغزش با استفاده از ساختار از حرکت (SfM) و همبستگی تصویر عکاسی با پهپاد چند زمانی. Prog. فیزیک Geogr. 2014 ، 38 ، 97-116. [ Google Scholar ] [ CrossRef ]
- فاضل، HM; صالح، AA; علی، IA; Inanaga، S. استفاده از سنجش از دور برای نقشه برداری از فرسایش خندقی در امتداد رودخانه Atbara، سودان. بین المللی J. Appl. زمین Obs. Geoinf. 1999 ، 1 ، 175-180. [ Google Scholar ] [ CrossRef ]
- مک اینز، جی. ویجیاک، او. Roberts, AM با استفاده از Google Earth برای نقشه برداری از گستره خندق در منطقه West Gippsland (ویکتوریا، استرالیا). بین المللی کنگره مدل. شبیه سازی 2011 ، 49 ، 3370-3376. [ Google Scholar ]
- مترنیخت، GI; Zinck, JA ارزیابی محتوای اطلاعات JERS-1 SAR و دادههای Landsat TM برای تمایز ویژگیهای فرسایش خاک. ISPRS J. Photogramm. 1998 ، 53 ، 143-153. [ Google Scholar ] [ CrossRef ]
- Vrieling، A. رودریگز، SC; بارتولومئوس، اچ. Sterk، G. شناسایی خودکار خندقهای فرسایشی با تصاویر ASTER در سرادوس برزیل. بین المللی J. Remote Sens. 2007 , 28 , 2723-2738. [ Google Scholar ] [ CrossRef ]
- کرمی، ع. خورانی، ع. نوهگر، ع. شمسی، SRF; موسوی، وی. نقشه برداری فرسایش خندقی با استفاده از روش های طبقه بندی تصاویر مبتنی بر شی و مبتنی بر پیکسل. محیط زیست مهندس Geosci. 2015 ، 21 ، 101-110. [ Google Scholar ] [ CrossRef ]
- دورو، دی سی؛ فرانکلین، SE; Dubé، MG مقایسه تحلیل تصویر مبتنی بر پیکسل و شی با الگوریتمهای یادگیری ماشین انتخاب شده برای طبقهبندی مناظر کشاورزی با استفاده از تصاویر SPOT-5 HRG. سنسور از راه دور محیط. 2012 ، 118 ، 259-272. [ Google Scholar ] [ CrossRef ]
- شروتی، RBV; کرل، ن. جتن، وی. عبدالله، ل. Machach، I. کمی سازی تغییرات زمانی در مناطق فرسایش خندقی با تجزیه و تحلیل شی گرا. Catena 2015 ، 128 ، 262-277. [ Google Scholar ] [ CrossRef ]
- شروتی، RBV; کرل، ن. جتن، V. استخراج ویژگی خندق مبتنی بر شی با استفاده از تصاویر با وضوح فضایی بالا. ژئومورفولوژی 2011 ، 134 ، 260-268. [ Google Scholar ] [ CrossRef ]
- شروتی، RBV; کرل، ن. جتن، وی. Stein، A. پیشبینی سیستم خندقی مبتنی بر شی از تصاویر با وضوح متوسط با استفاده از جنگلهای تصادفی. ژئومورفولوژی 2014 ، 216 ، 283-294. [ Google Scholar ] [ CrossRef ]
- وانگ، تی. او، اف. ژانگ، ا. گو، ال. ون، ی. جیانگ، دبلیو. Shao, H. مطالعه کمی فرسایش خندقی بر اساس تکنیک های تجزیه و تحلیل شی گرا: مطالعه موردی در حوضه Beiyanzikou از Qixia، شاندونگ، چین. علمی World J. 2014 ، 149-168. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تانگ، GA; Li، FY; لیو، XJ; لانگ، ی. یانگ، ایکس. تحقیق در مورد طیف شیب فلات لس. علمی چین سر. E 2008 ، 51 ، 175-185. [ Google Scholar ] [ CrossRef ]
- زو، ی. Cai، Q. فرآیندهای فرسایش شیاری و عوامل آن در خاک های مختلف. در فرسایش خندقی تحت تغییر جهانی ; Li, Y., Poesen, J., Valentin, C., Eds. انتشارات علم و فناوری سیچوان: چنگدو، چین، 2004; صص 96-108. [ Google Scholar ]
- ژو، TX خندق و فرسایش تونل در منطقه تپهای فلات لس، چین. ژئومورفولوژی 2012 ، 153 ، 144-155. [ Google Scholar ] [ CrossRef ]
- ژو، ی. تانگ، جی. یانگ، ایکس. شیائو، سی سی؛ ژانگ، ی. Luo, ML زمین های مثبت و منفی در شمال فلات Shaanxi Loess. جی. جئوگر. علمی 2010 ، 20 ، 64-76. [ Google Scholar ] [ CrossRef ]
- وو، ی. چنگ، اچ. نظارت بر فرسایش خندقی در فلات لس چین با استفاده از یک سیستم موقعیتیابی جهانی. کاتنا 2005 ، 63 ، 154-166. [ Google Scholar ] [ CrossRef ]
- جیانگ، اس. تانگ، جی. لیو، ک. یک روش جدید استخراج خط شانه لس بر اساس اپراتور مار-هیلدرث و ماسک زمین. PLoS ONE 2015 ، 10 ، e0123804. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، ز. ژانگ، ی. زو، س. سلام.؛ یائو، دبلیو. ارزیابی توسعه خندق بانک و پوشش گیاهی در فلات لس چین. ژئومورفولوژی 2015 ، 228 ، 462-469. [ Google Scholar ] [ CrossRef ]
- لی، ز. ژانگ، ی. زو، س. یانگ، اس. لی، اچ. Ma، H. یک مدل ارزیابی فرسایش خندقی برای فلات لس چین بر اساس تغییرات در طول و مساحت خندق. کاتنا 2016 . [ Google Scholar ] [ CrossRef ]
- فنگ، ایکس. فو، بی. لو، ن. زنگ، ی. وو، بی. چگونه بازسازی اکولوژیکی خدمات اکوسیستم را تغییر میدهد: تحلیلی از ترسیب کربن در فلات لس چین. علمی Rep. 2013 , 3 , 2846. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژنگ، اف. وانگ، ب. فرسایش خاک در منطقه لوس فلات چین. در بازسازی و توسعه فلات تخریب شده لس، چین ؛ Tsunekawa, A., Liu, G., Yamanaka, N., Du, S., Eds. Springer: Nishikanda، ژاپن، 2014; صص 77-92. [ Google Scholar ]
- تورس سانچز، جی. لوپز-گرانادوس، اف. د کاسترو، هوش مصنوعی؛ Peña-Barragán، JM پیکربندی و مشخصات یک وسیله نقلیه هوایی بدون سرنشین (UAV) برای مدیریت اولیه علف های هرز خاص سایت. PLoS ONE 2013 ، 8 ، e58210. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ترنر، دی. لوسییر، آ. والاس، L. ارجاع جغرافیایی مستقیم تصاویر پهپاد با وضوح فوق العاده بالا. IEEE Trans. Geosci. Remote Sens. 2014 , 52 , 2738–27450. [ Google Scholar ] [ CrossRef ]
- وایتهد، کی. هوگنهولتز، CH; میشک، س. براون، او. LeClair، A. تامینگا، ا. بارچین، تی. مورمن، بی. Eaton، B. سنجش از دور محیط با سیستمهای هواپیمای بدون سرنشین کوچک (UAS)، بخش 2: کاربردهای علمی و تجاری. J. بدون سرنشین Veh. سیستم 2014 ، 2 ، 86-102. [ Google Scholar ] [ CrossRef ]
- چندلر، جی. کاربرد مؤثر فتوگرامتری دیجیتالی خودکار برای تحقیقات ژئومورفولوژیکی. زمین گشت و گذار. روند. Landf. 1999 ، 24 ، 51-63. [ Google Scholar ] [ CrossRef ]
- استامف، ا. Kerle، N. نقشه برداری شی گرا زمین لغزش ها با استفاده از جنگل های تصادفی. سنسور از راه دور محیط. 2011 ، 115 ، 2564-2577. [ Google Scholar ] [ CrossRef ]
- دمارچی، ال. بیزی، اس. Piégay، H. نقشه برداری سلسله مراتبی مبتنی بر شی از واحدهای منظره رودخانه و زیستگاه های درون جریان با استفاده از تصاویر LiDAR و VHR. Remote Sens. 2016 , 8 , 97. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Tarboton, DG روشی جدید برای تعیین جهت جریان و نواحی شیب در مدلهای رقومی ارتفاعی شبکه. منبع آب Res. 1997 ، 33 ، 309-319. [ Google Scholar ] [ CrossRef ]
- بااتز، ام. Schäpe، A. بخشبندی چند رزولوشن: یک رویکرد بهینهسازی برای تقسیمبندی تصویر در مقیاس چندگانه با کیفیت بالا. در Angewandte Geographische Informationsverarbeitung XII ; Herbert Wichmann Verlag: هایدلبرگ، آلمان، 2000; ص 12-23. [ Google Scholar ]
- بنز، UC؛ هافمن، پی. ویلهاک، جی. لینگنفلدر، آی. Heynen، M. تجزیه و تحلیل فازی با وضوح چندگانه، شی گرا داده های سنجش از دور برای اطلاعات آماده GIS. ISPRS J. Photogramm. 2004 ، 58 ، 239-258. [ Google Scholar ] [ CrossRef ]
- اندرس، NS; Seijmonsbergen، AC; Bouten، W. بهینه سازی بخش بندی و تجزیه و تحلیل مبتنی بر شی طبقه بندی شده برای نقشه برداری ژئومورفولوژیکی نیمه خودکار. سنسور از راه دور محیط. 2011 ، 115 ، 2976-2985. [ Google Scholar ] [ CrossRef ]
- دراگوت، ال. Eisank، C. طبقه بندی خودکار توپوگرافی مبتنی بر شی از داده های SRTM. ژئومورفولوژی 2012 ، 141 ، 21-33. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اسپیندولا، جنرال موتورز; کامارا، جی. ریس، IA; Bins، LS; Monteiro، انتخاب پارامتر AM برای الگوریتمهای تقسیمبندی تصویر در حال رشد با استفاده از همبستگی خودکار فضایی. بین المللی J. Remote Sens. 2006 ، 27 ، 3035-3040. [ Google Scholar ] [ CrossRef ]
- Woodcock، CE; Strahler, AH عامل مقیاس در سنجش از دور. سنسور از راه دور محیط. 1987 ، 21 ، 311-332. [ Google Scholar ] [ CrossRef ]
- Drǎguţ، L. تاید، دی. Levick، SR ESP: ابزاری برای تخمین پارامتر مقیاس برای تقسیمبندی تصویر با وضوح چندگانه دادههای سنجش از راه دور. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 859-871. [ Google Scholar ] [ CrossRef ]
- دراگوت، ال. سیلیک، او. آیسانک، سی. Tided، D. پارامترسازی خودکار برای تقسیم بندی تصویر در مقیاس چندگانه در چندین لایه. ISPRS J. Photogramm. 2014 ، 88 ، 119-127. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کلینتون، ن. هولت، ا. اسکاربرو، جی. یان، ال. Gong, P. سنجش دقت برای تقسیم بندی تصویر مبتنی بر شی. فتوگرام مهندس Remote Sens. 2010 , 76 , 289-299. [ Google Scholar ] [ CrossRef ]
- لیو، ی. بیان، ال. منگ، ی. وانگ، اچ. ژانگ، اس. یانگ، ی. شائو، ایکس. وانگ، ب. معیارهای اختلاف برای انتخاب ترکیب بهینه مقادیر پارامتر در تجزیه و تحلیل تصویر مبتنی بر شی. ISPRS J. Photogramm. 2012 ، 68 ، 144-156. [ Google Scholar ] [ CrossRef ]
- بریمن، L. جنگل های تصادفی. ماخ فرا گرفتن. 2001 ، 45 ، 5-32. [ Google Scholar ] [ CrossRef ]
- بلژیک، م. Drăguţ، L. جنگل تصادفی در سنجش از دور: بررسی برنامهها و جهتهای آینده. ISPRS J. Photogramm. 2016 ، 114 ، 24-31. [ Google Scholar ] [ CrossRef ]
- Haralick، RM رویکرد آماری و ساختاری به بافت. Proc. IEEE 1979 ، 67 ، 786-804. [ Google Scholar ] [ CrossRef ]
- گومز-گوتیرز، Á. کونوسنتی، سی. Angileri، SE; روتیگلیانو، ای. Schnabel, S. استفاده از ویژگی های توپوگرافی برای ارزیابی استعداد فرسایش خندقی (حساسیت) در دو حوضه مدیترانه ای: مزایا و محدودیت ها. نات خطرات 2015 ، 79 ، 291-314. [ Google Scholar ] [ CrossRef ]
- جاود، م. گراسو، اف. لو دانتک، ن. ورنی، آر. دلاکورت، سی. امان، جی. دلوفر، جی. Grandjean، P. پتانسیل پهپادها برای نظارت بر مورفودینامیک گل و لای (کاربرد برای مصب سن، فرانسه). ISPRS Int. J. Geo-inf. 2016 ، 5 ، 50. [ Google Scholar ] [ CrossRef ]
- گارسیا، وی. مولیندا، آر. سانچز، جی. آلجو، آر. Sotoca, J. هنگامی که همپوشانی به طور غیرمنتظره اثرات عدم تعادل را تغییر می دهد. در تشخیص الگو و تجزیه و تحلیل تصویر ; Martí, J., Benedí, J., Mendonça, A., Serrat, J., Eds. Springer: برلین/هایدلبرگ، آلمان، 2007; صص 499-506. [ Google Scholar ]
- تارولی، پی. توپوگرافی با وضوح بالا برای درک فرآیندهای سطح زمین: فرصت ها و چالش ها. ژئومورفولوژی 2014 ، 216 ، 295-312. [ Google Scholar ] [ CrossRef ]
- آهنگ، X. تانگ، جی. Li، FY; جیانگ، ال. ژو، ی. Qian، KJ استخراج خط شانه لس بر اساس مدل مار موازی GVF در منطقه تپه ای لس چین. محاسبه کنید. Geosci. 2013 ، 52 ، 11-20. [ Google Scholar ] [ CrossRef ]
- لی، ام. یانگ، ایکس. Xiong، LY Point Cloud Oriented Shoulder Line Extraction در منطقه تپه لوس. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، XLI-B3 ، 279–282. [ Google Scholar ]
- D’Oleire-Oltmanns، S. مارزولف، آی. تاید، دی. Blaschke، T. تشخیص مناطق آسیب دیده خندق با استفاده از تجزیه و تحلیل تصویر مبتنی بر شی (OBIA) در منطقه Taroudannt، مراکش. Remote Sens. 2014 , 6 , 8287–8309. [ Google Scholar ] [ CrossRef ]
- فیوروچی، اف. آردیزون، اف. روسی، ام. Torri, D. استفاده از تصاویر ماهواره ای استریوسکوپی برای نقشه برداری از رودخانه ها و خندق های زودگذر. Remote Sens. 2015 ، 7 ، 14151–14178. [ Google Scholar ] [ CrossRef ]
- لین، ی. جیانگ، م. یائو، ی. ژانگ، LF; Lin, JY استفاده از تصویربرداری مورب پهپاد برای تشخیص تک تک درختان در محیط های مسکونی. شهری برای. سبز شهری. 2015 ، 14 ، 404-412. [ Google Scholar ] [ CrossRef ]




© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر