

خلاصه
افراد دارای معلولیت در سفرهای روزمره در فضای باز با موانع زیادی روبرو هستند. یکی از قابل توجه ترین موانع شیب تند در بخش های پیاده رو است. سیستمها/سرویسهای ناوبری کنونی همه پایگاههای داده نقشه با ویژگیهای شیب را پشتیبانی نمیکنند و نمیتوانند شیب پیادهرو را در زمان واقعی محاسبه کنند. در این مقاله، ما تکنیکی برای محاسبه شیب بخشهای پیادهرو با دادههای تصویری ارائه میکنیم و مناسبترین مسیر را برای هر کاربر از طریق ادغام با مسیر GPS پیشبینی میکنیم. در تکنیک ما از دادههای مسیر GPS برای شناسایی قسمت پیادهروی که مسافر احتمالاً از آن عبور خواهد کرد و تصاویر بخش پیادهرو شناسایی شده استفاده میکنیم. از طریق تکنیکهای تشخیص لبه، لبههای اجسام، مانند ساختمانها، بیلبوردها و دیوارها را در پسزمینه تشخیص میدهیم. سپس شیب بخش با مقایسه نمایش خط آن در نقشه با لبه های شناسایی شده محاسبه می شود. نتیجه آزمایش ما نشاندهنده محاسبه مؤثر شیبهای پیادهرو است.
کلید واژه ها:
مسیر GPS ; پردازش تصویر ؛ جهت یابی
1. معرفی
تحرک مستقل یک جنبه مهم از کیفیت زندگی برای افراد دارای معلولیت (PWDs) است. به طور خاص، افرادی که از ویلچر استفاده می کنند و نابینا یا کم بینا هستند، اغلب هنگام سفر در فضای باز با چالش های منحصر به فردی مواجه می شوند [ 1 ]. سیستمها/سرویسهای ناوبری میتوانند نقش مهمی در کمک به معلولان با نیازهای حرکتی و مراجعشان داشته باشند. مایرز و همکاران با برخی از کاربران ویلچر برای انواع موانعی که معمولاً هنگام سفر در خارج از منزل با آن مواجه می شوند مصاحبه کرد و دریافت که پیاده روهای باریک، بدون رمپ، شیب های شیب دار، بدون بریدگی حاشیه پیاده رو، سطوح ضعیف پیاده رو، و موانع پیاده رو از جمله موانع هستند [ 2 ].]. یک سیستم/سرویس ناوبری که برای رسیدگی به چالشهای تحرک معلولان طراحی شده است، اطلاعاتی در مورد دسترسی به پیادهروها در پایگاه داده خود دارد و به اجتناب از موانع کمک میکند. در این مقاله، ما تکنیکی را برای محاسبه شیب پیادهرو ارائه میکنیم، یک نوع مانع که وقتی شیبدار باشد مانع از سفر افراد PWD در زمان واقعی میشود. در تکنیک ما، از مسیر کاربر برای دسترسی به تصاویر پیادهروی مجاور از مجموعه دادههای تصاویر نمای خیابان Google استفاده میشود، و شیب پیادهرو با استفاده از لبههای ساختمانها در پسزمینه، توسط تکنیک ما شناسایی میشود. یکی از ویژگی های مهم تکنیک ما این است که شیب تنها با استفاده از یک تصویر واحد محاسبه می شود.
روش پیشنهادی ما جدید است و سهم عمده آن ارائه خدماتی برای افراد معلول برای جلوگیری از شیب های تند از طریق محاسبه شیب پیاده رو توسط داده های تصویری، تجزیه و تحلیل مسیر برای تعیین اولویت کاربر، و توصیه یک مسیر مناسب نزدیک به کاربر است. این تکنیک را می توان در سیستم ها/سرویس های ناوبری موجود یا جدید گنجاند. ما امکان سنجی و دقت این تکنیک را از طریق یک آزمایش نشان می دهیم. ساختار مقاله به شرح زیر است. کارهای مرتبط در بخش 2 مورد بحث قرار گرفته است. روش پیشنهادی، ادغام دادههای مسیر GPS و دادههای تصویر، برای محاسبه شیب پیادهرو در زمان واقعی در بخش 3 توضیح داده شده است . یک روش پیشنهادی با در نظر گرفتن شیب و طول مسیر در بخش 4 پیشنهاد شده است. در بخش 5 ، نتیجه یک آزمایش با استفاده از این تکنیک مورد بحث قرار گرفته است. نتیجه گیری و تحقیقات آتی در بخش 6 مورد بحث قرار می گیرد .
2. مربوط به آثار
اسمیت و همکاران چارچوب جدیدی را پیشنهاد کرد که پیادهروها را در تصاویر نمای خیابان گوگل پردازش، شناسایی و طبقهبندی میکند [ 3 ]. آنها از تکنیک های پردازش تصویر برای تعیین اجزای افقی و عمودی استفاده می کنند و رنگ، مکان و حضور خطوط را به عنوان نشانه هایی برای تشخیص پیاده روها در نظر می گیرند. سنلت و همکاران چارچوبی برای ساختن نقشه های پیاده رو و عابر پیاده از تصاویر ماهواره ای [ 4 ] ایجاد کرد. این آثار با کار در این مقاله تفاوت دارند زیرا آنها فقط پیاده روها را در تصاویر تشخیص می دهند، در حالی که سهم ما محاسبه شیب یک پیاده رو پس از تشخیص آن در تصاویر است.
الکساندرا و همکاران ابزار ارزیابی کیفیت پیادهروی خودکار را توسعه داده است، یک سیستم کمهزینه که میتواند برای ارزیابی خودکار کیفیت پیادهرو مورد استفاده قرار گیرد و میتواند توسط آژانسها در مقیاس بزرگ مستقر شود [ 5 ]]. سیستم آنها نیاز به نصب تبلت های مجهز به برنامه روی ویلچر دارد، به طوری که وقتی ویلچر در حال حرکت است، تبلت داده های ویدئو، موقعیت مکانی GPS، شتاب سنج و ژیروسکوپ را ضبط می کند. سپس داده های ویدئویی و ارتعاشی برای مناطقی که نیاز به تعمیر دارند، تجزیه و تحلیل می شوند. آنها از طریق تکنیک های پردازش تصویر، پارامترهای پیاده روها از جمله عرض، نوع روسازی، کیفیت سطح (به عنوان مثال، ناهمواری، ناپیوستگی و شکاف)، درجه و تعداد موانع را محاسبه کردند. آنها همچنین یک شاخص کیفیت کامل پیاده رو برای شهر آتلانتا ایجاد کردند. کار آنها از این جهت با ما متفاوت است که از دستگاههای خاصی برای جمعآوری دادههای ترکیبی درباره پیادهروها استفاده میکنند، در حالی که ما فقط از شبکه پیادهرو و دادههای تصویر نمای خیابان Google برای محاسبه شیب پیادهرو در زمان واقعی استفاده میکنیم.
رن و کریمی برای کمک به کاربران ویلچر در مسیریابی در پیاده روها، یک برنامه ناوبری در اندروید توسعه دادند. آنها از GPS، شتابسنج، قطبنما و دوربین در دستگاههای اندرویدی برای یافتن موقعیت واقعی کاربران ویلچر استفاده کردند [ 6 ]. کار آنها با ما متفاوت است زیرا شیب پیاده رو را در زمان واقعی محاسبه نمی کنند.
به طور خلاصه، در حالی که در برخی از آثار موجود، پیادهروها در تصاویر شناسایی میشوند و از تصاویر دوربین برای نگاشت موقعیت کاربر به بخشهای پیادهرو استفاده میشود، در ادبیات محاسبه شیب پیادهرو در زمان واقعی خلأ وجود دارد. در این مقاله، با توسعه یک تکنیک محاسبه شیب پیاده رو، این شکاف را برطرف می کنیم.
3. تکنیک محاسبه شیب
تکنیک پیشنهادی دارای چهار مرحله است: شناسایی موقعیت کاربر در بخش پیاده رو با استفاده از مسیر GPS، یافتن تصاویر از Google Street View که شامل بخش پیاده رو است، تشخیص بخش پیاده رو در هر تصویر، و محاسبه شیب پیاده رو. مراحل و الگوریتم های مرتبط در شکل 1 نشان داده شده است.
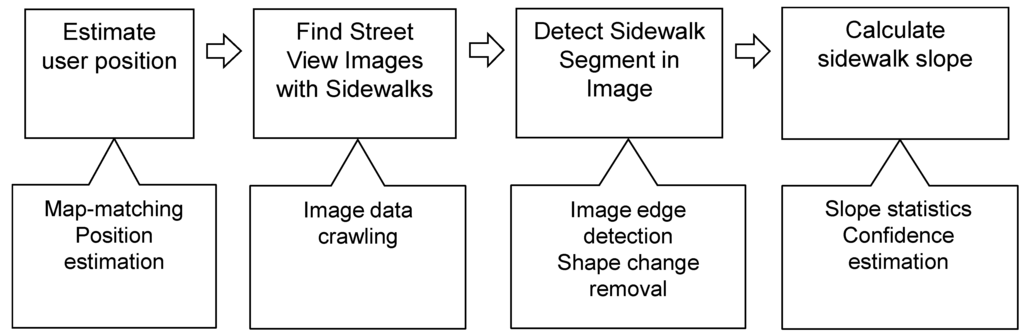
شکل 1. مراحل و الگوریتم های مرتبط برای تکنیک محاسبه شیب.
3.1. تخمین موقعیت کاربر در پیاده رو
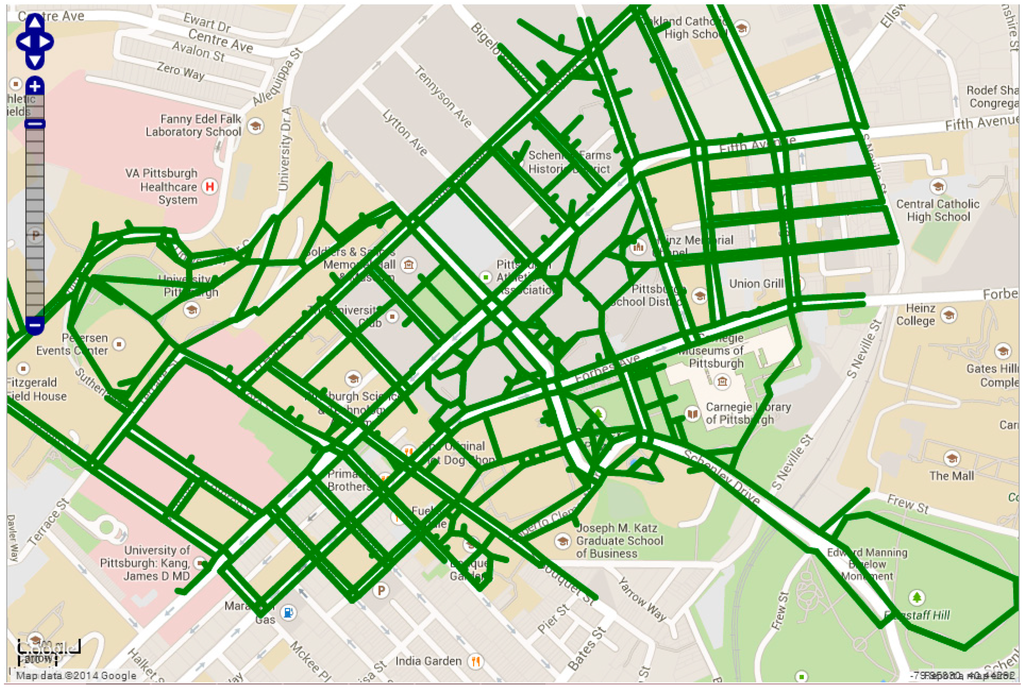
اولین مرحله از نقشه تکنیک ما موقعیت کاربر را در بخش پیاده رو با استفاده از داده های GPS مطابقت می دهد، به عنوان مثال ، تطبیق نقشه GPS [ 7 ، 8 ]. الگوریتم های تطبیق نقشه به طور گسترده مورد بررسی قرار گرفته اند، که یکی از تکنیک های حیاتی در دستیاران ناوبری شخصی است [ 7 ]. در تکنیک ما از الگوریتم توسعه یافته توسط رن و کریمی استفاده می کنیم زیرا برای تطبیق بخش های پیاده رو طراحی شده است [ 6 ]. این الگوریتم مبتنی بر مدل مارکوف پنهان است و از دیگر الگوریتمهای بالقوه مانند منطق فازی و کدگذاری زنجیرهای انتخاب شده است، زیرا میتواند نتایج با دقت بالایی تولید کند [ 6 ]]. الگوریتمهای تطبیق نقشه بسیار دقیق، مانند الگوریتمی که ما برای تکنیک خود انتخاب کردهایم، تخمین بهتری از موقعیت کاربر در یک شبکه پیادهرو ارائه میدهد و شناسایی بخشهای پیادهروی مجاور را ممکن میسازد، که هر دو برای راهنمایی بلادرنگ PWDها مورد نیاز هستند. پس از تطبیق دقیق نقطه GPS کاربر بر روی نقشه پیاده رو، یک بافر در اطراف موقعیت کاربر برای یافتن بخش بعدی پیاده رو در مسیر ایجاد می شود. این کار با در نظر گرفتن موقعیت قبلی کاربر، جهت سرعت فعلی و دقت موقعیت فعلی کاربر انجام می شود [ 6 ]. ما از پایگاهداده نقشه دسترسی شخصی (PAM) که شامل شبکه پیادهروی پردیس اصلی دانشگاه پیتسبورگ است، برای آزمایش تکنیک خود استفاده میکنیم. شکل 2 شبکه پیاده رو را در PAM نشان می دهد [6 ، 9 ].
شکل 2. شبکه پیاده رو در نقشه دسترسی شخصی (PAM).
3.2. پیدا کردن تصاویر نمای خیابان گوگل با پیادهروها
در مرحله دوم، با ارائه مختصات یک موقعیت (طول و عرض جغرافیایی) و جهت دید، این تکنیک تصاویری را از نمای خیابان گوگل جستجو می کند و آنهایی را انتخاب می کند که شامل بخش پیاده رو شناسایی شده در مرحله اول باشد. ما در این کار از Google Street View به عنوان منبع تصاویر استفاده کردیم و در حالی که کیفیت چندان بالایی ندارند، برای بسیاری از مناطق جغرافیایی به صورت رایگان در دسترس هستند. منبع جایگزین تصاویر، دوربین های روی برد (به عنوان مثال، دوربین های گوشی های هوشمند) است، اما با وجود کیفیت بالای آنها، ثبت این تصاویر نگرانی های عملی ایجاد می کند. نگرانی های مثال برای محاسبه شیب یک بخش عبارتند از: چند تصویر باید گرفته شود؟ تصاویر باید کجا گرفته شوند؟ هر تصویر در چه زاویه و فاصله ای باید ثبت شود؟
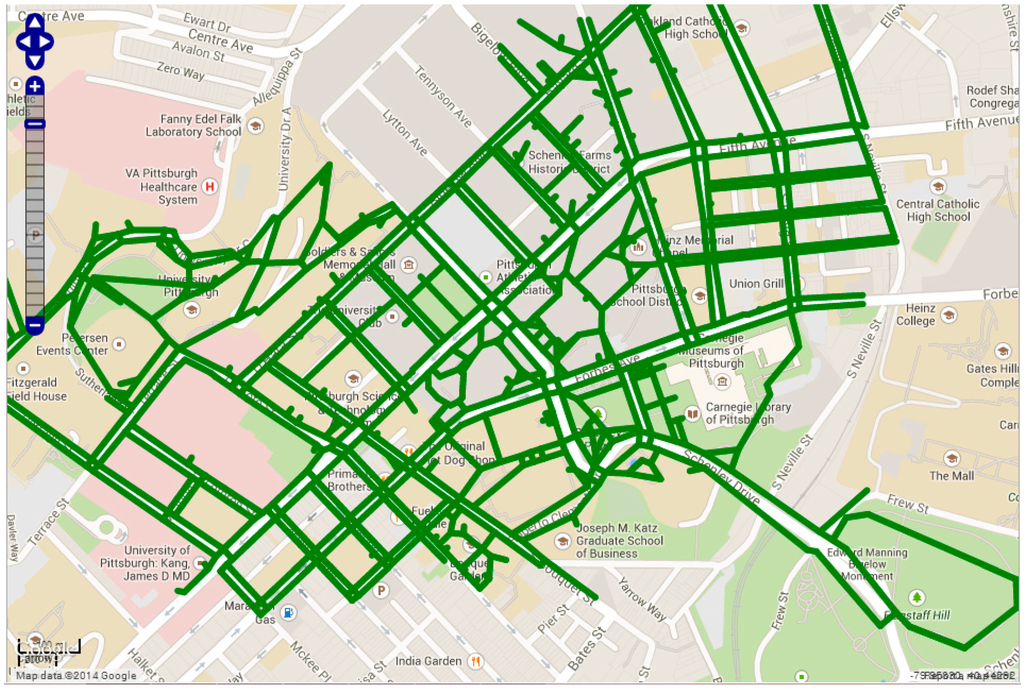
شکل 3 یک تصویر نمونه را نشان می دهد که بخشی از بخش پیاده رو را توصیف می کند. برای این تکنیک مهم است که جهت دید دوربین، هنگام گرفتن تصویر، عمود بر قسمت پیاده رو باشد. تغییر شکل اختلاف منظر در این جهت دید به حداقل می رسد و اگر جسم مشاهده شده در مرکز تصویر باشد نادیده گرفته می شود.
شکل 3. مثالی از تصویر نمای خیابان گوگل که شامل یک بخش پیاده رو است.
3.3. تشخیص بخش پیاده رو در تصویر
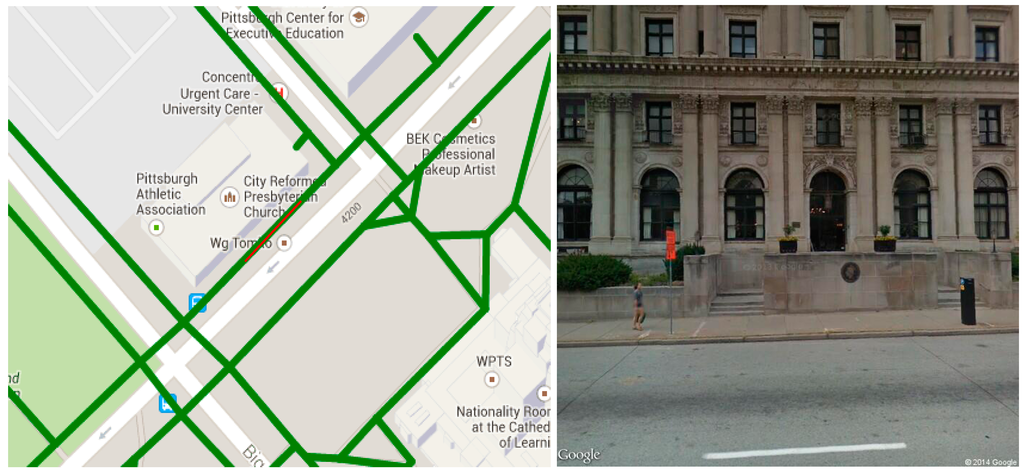
در مرحله سوم تکنیک، شیب بخش پیاده رو شناسایی شده شناسایی می شود. اسمیت و همکاران از رنگ، موقعیت مکانی و وجود خطوط در تصاویر نمای خیابان گوگل برای شناسایی پیاده روها استفاده کرد، در حالی که مشاهده تصویر نمای خیابان Google خیابان را تراز می کند [ 3 ]. سنلت و همکاران از تصاویر ماهواره ای برای شناسایی شبکه های پیاده رو استفاده کرد [ 4 ]. با این حال، هیچ یک از این تکنیک ها را نمی توان دوباره در کار ما استفاده کرد زیرا شیب را نمی توان با استفاده از جهت دید آنها تشخیص داد. شکل 4پیاده روهایی را نشان می دهد که با این تکنیک های دیگر شناسایی شده اند. در تکنیک ما، جهت دید را عمود بر پیاده رو تنظیم می کنیم تا تغییر شکل اختلاف منظر را کاهش دهیم. مهمتر از آن، جهت عمود بر دید می تواند به تشخیص شیب پیاده رو با مقایسه آن با ساختمان های موجود در پس زمینه کمک کند.
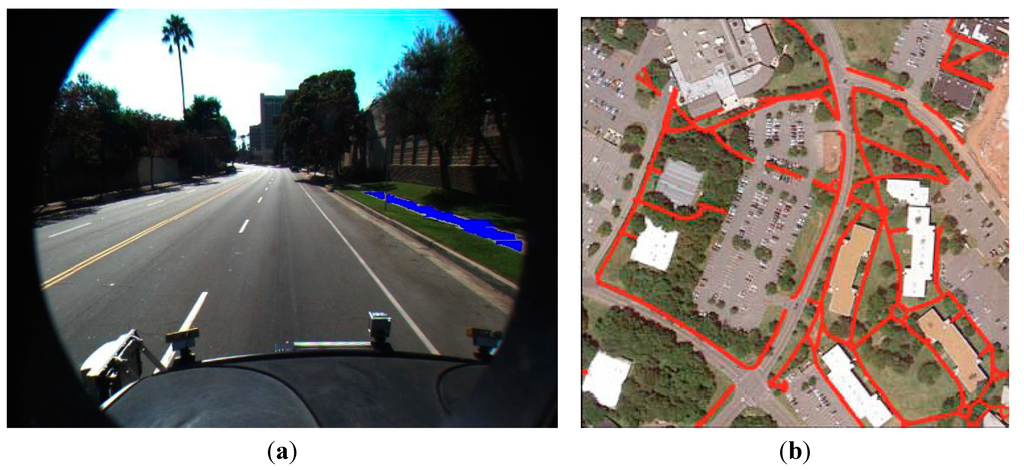
شکل 4. تکنیک های تشخیص پیاده رو: ( الف ) پیاده روهای شناسایی شده (آبی) در نمای خیابان گوگل. تصویر ( ب ) بخشهایی (قرمز) که به عنوان پیاده رو شناسایی شده اند.
از آنجایی که روش ما فقط شیب پیاده رو را محاسبه می کند که همان شیب جاده متصل به آن است، لازم نیست شبکه پیاده رو را تقسیم بندی کنیم. در نتیجه، هر خط مستقیمی که در امتداد جاده تشخیص داده شود، می تواند برای محاسبه شیب استفاده شود. در تکنیک خود، از الگوریتم Canny برای تشخیص لبهها در تصاویر نمای خیابان گوگل استفاده میکنیم و سپس از انتقال Hough برای تشخیص خطوط مستقیم در لبهها استفاده میکنیم [ 10 ، 11 ، 12 ]. پایین ترین خط مستقیم افقی طولانی، پیاده رو در نظر گرفته می شود. شکل 5 نتیجه مرحله تشخیص پیاده رو را نشان می دهد.
شکل 5. تشخیص پیاده رو. پایین ترین خط در تصویر سمت راست برای محاسبه زاویه بخش پیاده رو استفاده می شود.
3.4. محاسبه شیب
خطوط مستقیم شناسایی شده در تصاویر نمای خیابان گوگل شامل پیاده روها و سایر خطوط مستقیم در پس زمینه است. روند در بین خطوط مستقیم نشان دهنده درجه شیب پیاده رو فعلی است. شکل 6 دو نمونه از خطوط مستقیم را نشان می دهد که روی ساختمان ها در پس زمینه شناسایی شده اند. خطوط مستقیم روی ساختمان ها معمولا افقی و عمودی هستند و در تکنیک ما به عنوان مرجعی برای محاسبه شیب پیاده روها استفاده می شود.
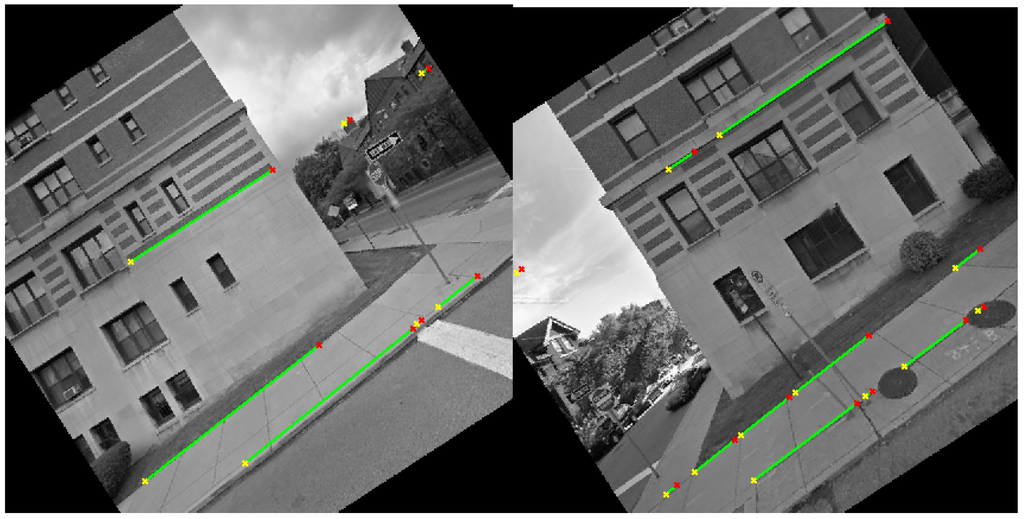
شکل 6. نمونه هایی از تشخیص خط مستقیم. شیب بخش پیاده رو، زاویه بین خط نشان دهنده بخش پیاده رو و خطوط نمایانگر ساختمان است.
با فرض اینکه بتوان تغییر شکل اختلاف منظر را نادیده گرفت، پیاده رو به درستی تشخیص داده می شود و خط مستقیم در پس زمینه افقی است. شیب پیاده رو زاویه بین پیاده رو (خط مستقیم) و خط مستقیم پس زمینه است. فرض کنید P 1 و P 2 دو نقطه در لبه یک بخش پیاده رو و Q 1 و Q 2 نشانگر دو نقطه در لبه ساختمان پس زمینه باشند. سپس زاویه شیب را می توان به صورت زیر محاسبه کرد:
s l o p e = arccos⎧⎩⎨⎪⎪⎪⎪⎪⎪پ1پ–→–2∙س1س2–→––∣∣∣پ1پ2–→––∣∣∣×∣∣∣س1س2–→––∣∣∣⎫⎭⎬⎪⎪⎪⎪⎪⎪سل�په=آرکوس{پ1پ→2•س1س2→|پ1پ2→|×|س1س2→|}
4. نمایه شبکه شیب
هنگامی که شیب یک بخش در زمان واقعی محاسبه می شود، به عنوان بخشی از مسیر GPS کاربر ثبت می شود که توسط دنباله ای از بخش های پیاده رو مجاور تشکیل شده است. همانطور که کاربر به سفر در بخش های جدید ادامه می دهد، شیب ها در بخش های جدید محاسبه می شوند و یک پروفایل شبکه شیب برای هر مسیر می توان ساخت. نمایه شبکه شیب ساخته شده می تواند به ردیابی موقعیت کاربر و پیش بینی بهترین مسیرهای ممکن برای کاربر در طول ناوبری بلادرنگ کمک کند. شکل 7 نمونه ای از مسیر کاربر را به همراه سه پروفایل شبکه شیب نشان می دهد که هر کدام برای بخش متفاوتی از مسیر هستند. این مثال ها به صورت دستی تولید می شوند تا نشان دهند چگونه می توان از پروفایل های شیب شبکه در پیش بینی مسیرها استفاده کرد.
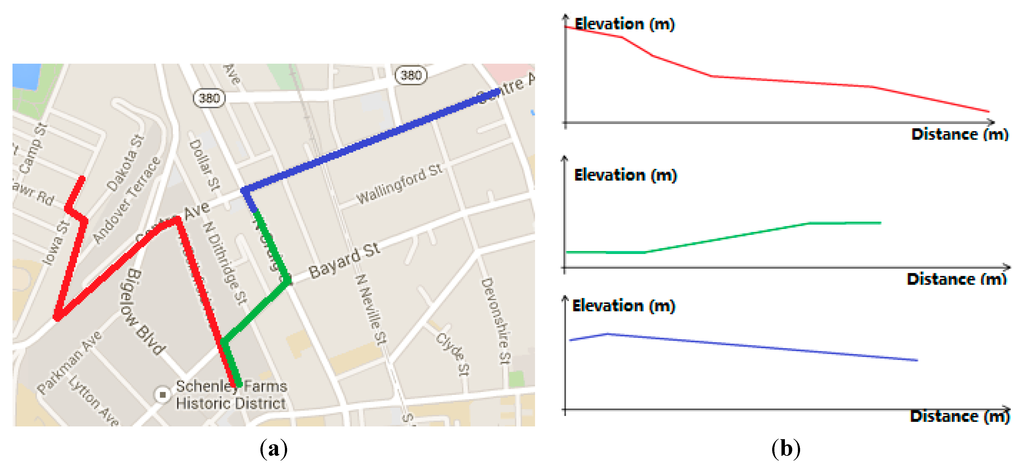
شکل 7. ( الف ) نمونه ای از تاریخچه مسیر برای یک کاربر. ( ب ) منحنی روند ارتفاعی که الگوی استفاده از شیب کاربر را نشان می دهد.
تاریخچه مسیر یک کاربر شامل پروفایل های شبکه شیب است که نشان دهنده الگوی شیب استفاده و ترجیح کاربر است. چنین الگوهای استفاده و ترجیح شیب را می توان در یافتن و توصیه مسیرهای شخصی سازی شده در زمان واقعی استفاده کرد. شایان ذکر است که برای ارزیابی شیب های مسیر و یافتن و توصیه مسیرهای شخصی سازی شده، توجه به روند شیب در مسیرها و شناسایی مسیرهای دارای روند نسبتاً یکنواخت ضروری است. شکل 8دو مسیر را با مبدا و مقصد یکسان نشان می دهد. اگرچه هر دو مکان مبدا و مقصد در یک ارتفاع قرار دارند، شیب مسیر به رنگ آبی نسبتا یکنواخت است، در حالی که مسیر قرمز دارای بخش های شیب دار بیشتری است. در این مثال مسیر به رنگ آبی در مقایسه با مسیر قرمز برای افراد PWD مناسب تر است.

شکل 8. دو مسیر نمونه با یک جفت مبدا و مقصد.
رویکرد پیشنهادی بالا مستلزم توسعه روشی برای محاسبه مقداری برای نشان دادن روند شیب مسیرها است، در حالی که از تعصب ناشی از طول کل مسیر و ارتفاع کلی مسیر اجتناب میشود. بر اساس این مشاهدات، واریانس شیب می تواند به درستی روند یک مسیر را نشان دهد که می تواند به صورت زیر بیان شود:
Va r =σ2= 🔻ایکس2Eایکسدx –μ2�آ�=�2=🔻ایکس2�ایکسدایکس–�2
که در آن x فاصله از محل مبدا و Ex ارتفاع در موقعیت x است. μ شیب متوسط است که به صورت زیر محاسبه می شود:
μ = (Eد–Eo) / ل�=(�د–��)/ل
که در آن E d و E o به ترتیب ارتفاعات در مقصد و مبدا و l طول کل مسیر است.
در رابطه (1)، هرچه Var کمتر باشد، شیب مسیر هموارتر خواهد بود. پس از محاسبه مقادیر Var برای چندین مسیر یک کاربر، شیب مورد نظر کاربر را می توان تخمین زد که به نوبه خود می تواند در به روز رسانی مسیرها استفاده شود.
با ادغام شیب ترجیحی کاربر با سایر ویژگی های مسیر، می توان روشی برای توصیه مسیرهای شخصی سازی شده ایجاد کرد. از بین ویژگی های مسیر مختلف، طول مسیر برای توسعه چنین روشی از اهمیت ویژه ای برخوردار است. در روش ما، طول، واریانس شیب و ترجیح کاربر برای یافتن و توصیه مسیرهای شخصی شده (با رعایت شیب ترجیحی) را ادغام می کنیم. این روش بر اساس وزنی است که اولویت، طول و شیب سابقه کاربر را ادغام می کند.
با فرض وجود n گزینه مسیر با طول ها و واریانس های شیب مختلف بین یک جفت مکان مشخص مبدا و مقصد، مقدار شاخص R که برای ارزیابی مسیرهای مختلف است، به صورت زیر محاسبه می شود:
آرک=لکلدقیقه+VآrکVآrدقیقه×Va r Hمن نیستم _ _ _yc u r e n t _Va r Hمن نیستم _ _ _yحداکثرآرک=لکلدقیقه+�آ�ک�آ�دقیقه×�آ�اچمنستی���جتو��ه�تی�آ�اچمنستی���حداکثر
که در آن l k طول مسیر k است . l min طول کوتاه ترین مسیر است. Var k واریانس شیب مسیر k است . Var min کمترین واریانس شیب در میان همه n گزینه است. جریان VarHistory میانگین Var کاربر است. و VarHistory max بالاترین میانگین Var در بین تمام مسیرهای کاربر است. هر چه مقدار R کمتر برای یک مسیر باشد، احتمال آن بیشتر توصیه می شود.
5. آزمایش کنید
ما تکنیک پیشنهادی برای محاسبه شیبها را در زمان واقعی در این کار با انجام آزمایشی ارزیابی کردیم. ما تکنیک پروفیل شبکه شیب پیشنهادی را ارزیابی نکردیم زیرا ارزیابی مناسب آن نیازمند افراد PWD است که مایل به سفر در بخشهای مختلف با شیبهای مختلف هستند، کاری که فراتر از محدوده این کار بود.
در آزمایش انجام شده، ما از الگوریتمهای تطبیق نقشه مبتنی بر GPS و دادههای تصویری برای محاسبه شیب پیادهرو استفاده کردیم. برای پردازش تصویر، ما از Matlab استفاده کردیم، جایی که RGB تصاویر Google Street View به عنوان ورودی و خروجی ها لبه ها، خطوط مستقیم و مقدار شیب بودند. ابزارهای پردازش تصویر مورد استفاده در Matlab شامل توابع rgb2gray، imrotate، edge و توابع Hough بود. آزمایش و نتیجه آن در زیر مورد بحث قرار گرفته است.
ما به طور تصادفی 100 بخش پیاده رو را در محوطه پردیس اصلی دانشگاه پیتسبورگ با استفاده از پایگاه داده PAM انتخاب کردیم و 10 تصویر از نمای خیابان گوگل را برای هر بخش جستجو کردیم. تصاویر ارائه شده توسط Google Street View دارای ارجاع جغرافیایی هستند، هر کدام با 800*800 پیکسل و شامل 5 تا 10 متر از پیاده رو با توجه به عرض جاده هستند.
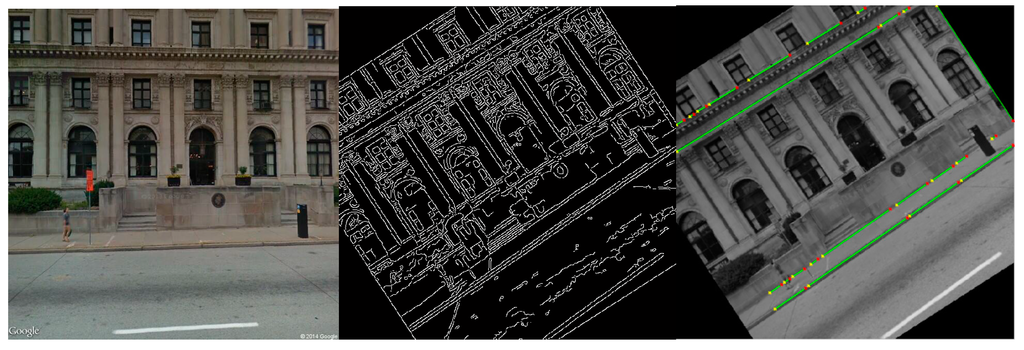
در آزمایش محاسبه شیب، از 1000 تصویر استفاده شده، 117 تصویر منجر به خطای کمتر از 2 درجه و 52 تصویر منجر به خطای زیر 1 درجه شد و تنها 1٪ از کل تصاویر نتایج دقیقی را ایجاد کردند. در حالی که این تعداد کمی از تصاویر با سطح دقت بالا است، ما توانستیم حداقل یک تصویر برای هر بخش پیاده رو مورد علاقه در آزمایش با سطح قابل قبولی از دقت پیدا کنیم. 64 از 100 بخش پیاده رو حداقل یک تصویر دارند که خطای محاسبه شیب آن زیر 2.0 درجه است و 44 قطعه از 100 بخش پیاده رو حداقل یک تصویر دارند که خطای محاسبه آن زیر 1.0 درجه است. شکل 9 نمونه ای از شیب محاسبه شده را نشان می دهد. پس از اعمال الگوریتم تشخیص لبه Canny و تبدیل Hough، پنج خط به عنوان برجسته شده درشکل 9 ج [ 10 ، 11 ، 12 ]. این خطوط شامل خطوطی هستند که نمایانگر پیاده رو و ساختمان پس زمینه هستند. با در نظر گرفتن پایین ترین خط نشان دهنده پیاده رو و بالاترین خط نشان دهنده ساختمان پس زمینه، زاویه شیب 8.5 درجه محاسبه می شود که بسیار نزدیک به زاویه واقعی 8.42 درجه ذخیره شده در پایگاه داده PAM است.
شکل 10 دقت کلی تکنیک پیشنهادی را نشان می دهد که با مقایسه نتیجه محاسبه شیب هر تصویر با مقدار شیب واقعی ثبت شده در پایگاه داده PAM ارزیابی شده است. دقت پیاده رو نشان دهنده درصد تصاویری است که منجر به شیب دقیق برای پیاده رو شده است. نتیجه نشان می دهد که در مجموع 64 بخش حداقل یک تصویر دارند که شیب را به درستی محاسبه کرده است (خطای شیب < 1.0 درجه)، و 33 بخش فقط یک تصویر دارند که شیب به درستی محاسبه شده است. اگرچه این تکنیک تنها به یک تصویر برای محاسبه شیب نیاز دارد، مواردی وجود داشت که در آن آزمایش نتایج دقیقی ایجاد نکرد. تنها 1% از تمام تصاویر در این آزمایش نتایج دقیقی را تولید کردند.
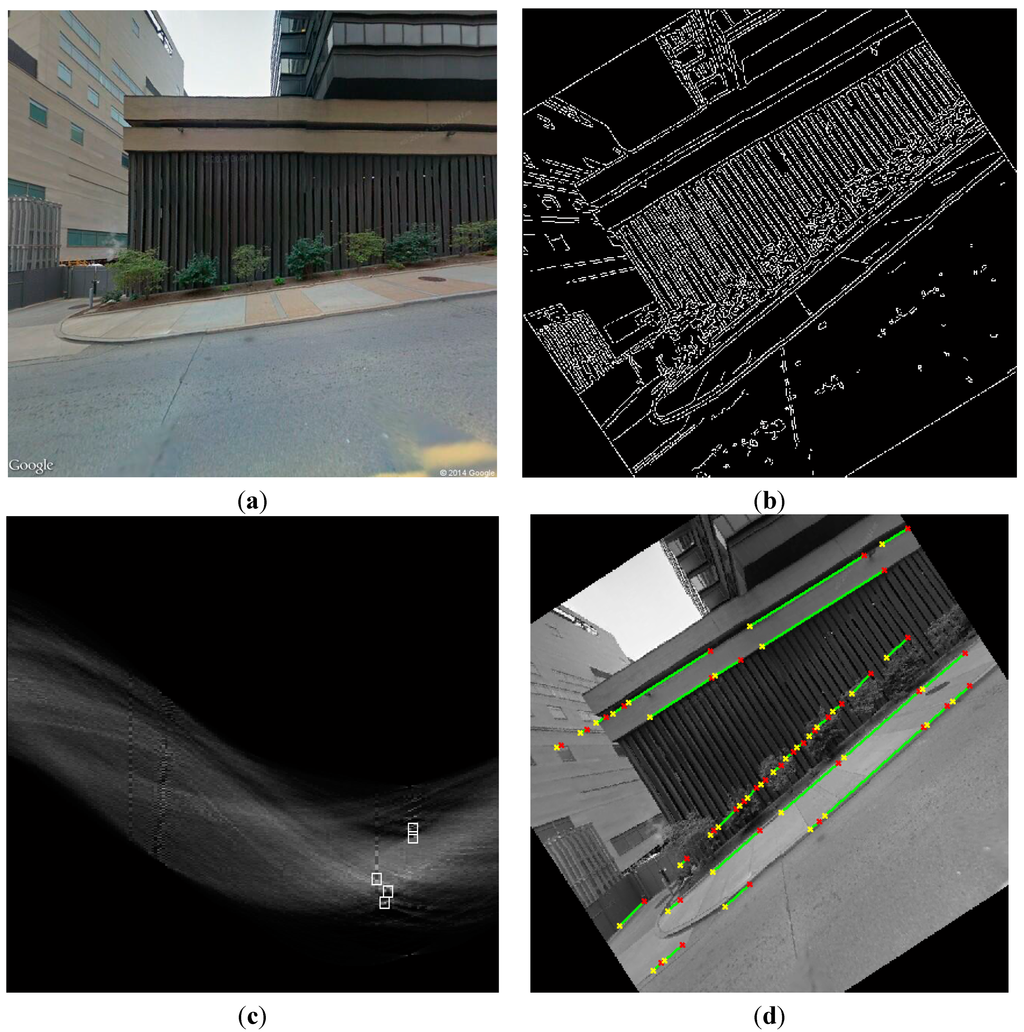
شکل 9. مثال محاسبه شیب پیاده رو: ( الف ) تصویر اصلی. ( ب ) نتیجه الگوریتم تشخیص لبه Canny. ( ج ) نتیجه تبدیل Hough، پنج خط مستقیم شناسایی و به عنوان دایره های نقطه نور نشان داده شده است. ( د ) خطوط مستقیم شناسایی شده در تصویر اصلی.
شکل 11 چهار مثال با نتایج نادرست را نشان می دهد که هر کدام به دلایل متفاوتی هستند. در شکل 11 الف، خطوط مستقیم با موفقیت شناسایی شده اند، اما بالاترین خط مستقیم متعلق به سیم برق است که برای محاسبه شیب مناسب نیست. در شکل 11 ب، به دلیل سطح پیاده رو که قابل تشخیص نیست، پیاده رو صحیح تشخیص داده نشده است. در شکل 11 c، هیچ ساختمانی در پس زمینه وجود ندارد، بنابراین شیب را نمی توان محاسبه کرد. در شکل 10 د، به دلیل فاصله زیاد بین ساختمان پس زمینه و دوربین، شیب قابل محاسبه نیست.
این موارد در بالا ممکن است با استفاده از تکنیک های مختلف مورد توجه قرار گیرد. در یک تکنیک، سطح اطمینان در تشخیص، که در آن اطمینان در خطوط مستقیم طولانی و پیوسته، معمولاً معماریهای ساخته شده توسط انسان، بالا است، و در خطوط کوتاه، معمولاً پسزمینههای پیچیده، کابین یک گزینه است. تکنیک دیگر مبتنی بر رای دادن است. از آنجایی که انتظار نمی رود همه تصاویر منجر به تشخیص صحیح شوند، یک تکنیک عملی برای جلوگیری از تشخیص نادرست در نظر گرفتن چندین تصویر برای هر پیاده رو برای محاسبه شیب همان بخش است. با تجزیه و تحلیل نتایج شیب از تمام تصاویر، حالت مقادیر شیب به عنوان قابل اطمینان ترین نتیجه در نظر گرفته می شود و فراوانی مقدار مد نیز میزان اطمینان در محاسبه را نشان می دهد.
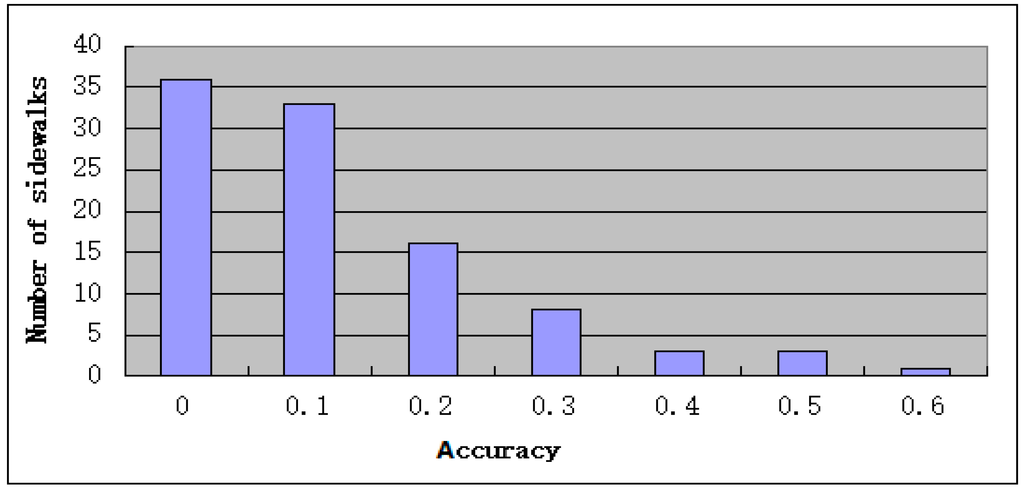
شکل 10. تعداد پیاده روها و سطح دقت (از 10 تصویر نمونه در هر پیاده رو).
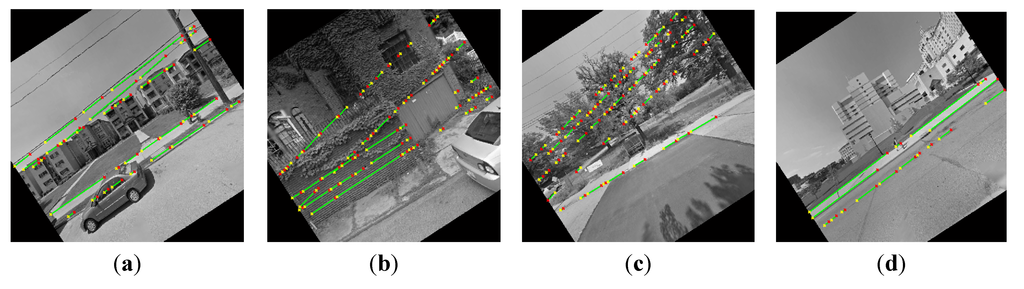
شکل 11. موارد مثال با محاسبه شیب نادرست یا بدون محاسبه: ( الف ) داده های پس زمینه نامناسب. ( ب ) بخش ناروشن پیاده رو؛ ( ج ) بدون ساختمان در پس زمینه. ( د ) ساختمان پس زمینه دور.
6. نتیجه گیری و آینده پژوهی
تکنیک ما از دادههای مسیر GPS و دادههای تصویر نمای خیابان Google برای محاسبه شیب پیادهروها و توصیه مسیرهای مناسب در زمان واقعی استفاده میکند. آزمایشی برای ارزیابی تکنیک پیشنهادی انجام شد. نتایج آزمایش نشان میدهد که این تکنیک در همه موارد کار نمیکند و چند مورد که تکنیک کار نمیکند مشخص شد.
در حالی که تکنیک پیشنهادی امیدوارکننده است، کار در این مقاله بینش هایی را در مورد چندین سؤال تحقیقاتی جدید ارائه می دهد. یکی در مورد یافتن تعداد بیشتری از مسیرها و تصاویر برای آزمایش تکنیک برای تعیین مناسب بودن آن برای محاسبه شیب ها است. یکی دیگر از سوالات تحقیقاتی به رفتار کاربران برای درک بیشتر ترجیحات آنها مربوط می شود. برای پرداختن به این سوال پژوهشی، تکنیکهای پردازش تصویر جدید برای شناسایی ویژگیهای مسیر اضافی از تصاویر، مانند سطح پیادهرو، مواد و موانع، نیاز به بررسی دارند. در کنار این ویژگی ها با ترجیحات کاربر، می توان خدمات ناوبری مناسب برای کمک به معلولان را توسعه داد.
منابع
- تاپال، ن. وارنر، جی. دراینونی، ام ال. ویلیامز، اس آر. دیچفیلد، اچ. ویربیکی، جی. Nesathurai، S. یک مطالعه آزمایشی در مورد دسترسی عملکردی به ساختمان های عمومی و امکانات برای افراد دارای نقص. غیرفعال کردن توانبخشی. 2004 ، 26 ، 280-289. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Meyers، AR; اندرسون، جی جی. میلر، DR; شیپ، ک. Hoenig، H. موانع، تسهیلکنندهها و دسترسی کاربران ویلچر: درسهای اساسی و روششناختی از یک مطالعه آزمایشی اثرات زیستمحیطی. Soc. علمی پزشکی 2002 ، 55 ، 1435-1446. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اسمیت، وی. مالک، ج. Culler, D. طبقه بندی پیاده روها در تصاویر نمای خیابان. در مجموعه مقالات کنفرانس بین المللی محاسبات سبز 2013 (IGCC)، آرلینگتون، VA، ایالات متحده آمریکا، 27-29 ژوئن 2013. صص 1-6.
- سنلت، تی. Elgammal, A. تقسیم بندی پیاده روهای مسدود شده در تصاویر ماهواره ای. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی شناسایی الگو (ICPR) در سال 2012، تسوکوبا، ژاپن، 11 تا 15 نوامبر 2012. ص 805-808.
- فراکلتون، ای. گروسمن، آ. پالینگینیس، ای. کاستریون، اف. الانگو، وی. Guensler, R. اندازهگیری قابلیت پیادهروی: توسعه یک ابزار خودکار ارزیابی کیفیت پیادهرو. حومه شهر. حفظ کنید. 2013 . [ Google Scholar ] [ CrossRef ]
- رن، م. کریمی، تطبیق نقشه چندحسگر HA برای ناوبری عابر پیاده و ویلچر. در فناوریها و خدمات مبتنی بر مکان پیشرفته ؛ CRC Press: Boca Raton، FL، USA، 2013; ص 209-234. [ Google Scholar ]
- Greenfeld، JS تطبیق مشاهدات GPS با مکانهای روی نقشه دیجیتال. در مجموعه مقالات هشتاد و یکمین نشست سالانه هیئت تحقیقات حمل و نقل، واشنگتن، دی سی، ایالات متحده آمریکا، 13 تا 17 ژانویه 2002.
- برنشتاین، دی. Kornhauser، A. مقدمه ای بر تطبیق نقشه برای دستیاران ناوبری شخصی . موسسه فناوری نیوجرسی: نیوآرک، نیوجرسی، ایالات متحده آمریکا، 1998; پ. 16. [ Google Scholar ]
- کریمی، ح. ژانگ، ال. Benner, JG Personalized Accessibility Map (PAM): یک رویکرد جدید به کمک راهیابی برای افراد دارای معلولیت. ان GIS 2014 ، 20 ، 99-108. [ Google Scholar ] [ CrossRef ]
- Canny, J. یک رویکرد محاسباتی برای تشخیص لبه. IEEE Trans. الگوی مقعدی ماخ هوشمند 1986 ، 8 ، 679-698. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بالارد، DH تعمیم تبدیل Hough برای تشخیص اشکال دلخواه. تشخیص الگو 1981 ، 13 ، 111-122. [ Google Scholar ] [ CrossRef ]
- دودا، روسی. هارت، PE استفاده از تبدیل هاف برای تشخیص خطوط و منحنی ها در تصاویر. اشتراک. ACM 1972 ، 15 ، 11-15. [ Google Scholar ] [ CrossRef ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر